Document 10850785
advertisement

Hindawi Publishing Corporation
Discrete Dynamics in Nature and Society
Volume 2011, Article ID 649650, 24 pages
doi:10.1155/2011/649650
Research Article
Hopf Bifurcation for a Model of HIV Infection of
CD4 T Cells with Virus Released Delay
Jun-Yuan Yang,1, 2 Xiao-Yan Wang,1 and Xue-Zhi Li3
1
Department of Applied Mathematics, Yuncheng University, Yuncheng 044000, Shanxi, China
Beijing Institute of Information and Control, Beijing 100037, China
3
Department of Mathematics, Xinyang Normal University, Xinyang 464000, Henan, China
2
Correspondence should be addressed to Jun-Yuan Yang, yangjunyuan00@126.com
Received 23 December 2010; Accepted 2 March 2011
Academic Editor: Jianshe Yu
Copyright q 2011 Jun-Yuan Yang et al. This is an open access article distributed under the Creative
Commons Attribution License, which permits unrestricted use, distribution, and reproduction in
any medium, provided the original work is properly cited.
A viral model of HIV infection of CD4 T-cells with virus released period is formulated, and the
effect of this released period on the stability of the equilibria is investigated. It is shown that the
introduction of the viral released period can destabilize the system, and the period solution may
arise. The direction and stability of the Hopf bifurcation are also discussed. Numerical simulations
are presented to illustrate the results.
1. Introduction and Model Formulation
In the last decade, many mathematical models have been developed to describe the immunological response to infection with human immunodeficiency virus HIV see 1–11. Simple
HIV models have played a significant role in the development of a better understanding
of the disease and the various drug therapy strategies used against it. Perelson et al. in 1
proposed a basic mathematical model to describe spread of HIV. Many other models 12–14
which take the model proposed in 1 as their inspiration have been formulated. Zhou et al.
in 5 discussed the following ODE model:
T
dT
s − dT aT 1 −
− βTV ρI,
dt
Tmax
dI
βTV − δ ρ I,
dt
dV
qI − cV.
dt
1.1
2
Discrete Dynamics in Nature and Society
In 1.1, Tt, It represent, respectively, the concentration of healthy CD4 T cells and
infected CD4 T cells at time t, and V t represents the concentration of free HIV at time
t. These parameters are defined as follows: s is the source of CD4 T cells precursors, d is
the natural death rate of CD4 T cells, a is their growth rate thus, a > d in general, and
Tmax is their carrying capacity, β is the contact rate between uninfected CD4 T cells and virus
particles, δ is a blanket death term for infected cells, c is the clearance rate constant of virus,
q is the lytic death rate for infected cells, and ρ is cure rate from infected cells to healthy cells.
Parameters d, a, δ, β, ρ, c, Tmax , q, and s are positive values. They obtained the conditions for
which system 1.1 exists an orbitally asymptotically stable periodic solution.
Time delays of one type or another have been introduced to describe the time between
viral entry into a target cell and the production of new virus particles by many authors see
6–9. Culshaw and Ruan in 6 introduced a discrete time delay to the model to describe the
time between infection of a CD4 T-cell and the emission of viral particles on a cellular level.
They discussed locally asymptotically stable and obtained existence of the Hopf bifurcation
under some conditions. Herz et al. in 3 used a discrete delay to model the intracellular delay
that would substantially shorten the estimate for the half-life of free virus.
However, almost all of CD4 models were discussed and the discrete delay had
denoted the time between infection of a CD4 T-cell and the emission of viral particles on
a cellular level. According to reports of CDC government, they believed that there exists a
“window period” when the infected cell released virus. The time interval between point of
infection and detection of a seroconversion using US FDA-licensed third-generation antibody
assays averages 22 days. In primary HIV infection, a localized viral replication eclipse
takes place first, and lasts for 1–4 weeks 15. If the amount of virus released does not
attend a certain level, a patient infected by infected CD4 can not be examined. Therefore,
we introduce a discrete delay denoted the “window period” in their model. Efficacy of the
inhibition of viral replication is imposed upon the virus-host system by nucleoside analogue
therapy. Based on the work of Zhou et al. see 5, the HIV infection model with delay can
be written as follows:
T
dT
s − dT aT 1 −
− βTV ρI,
dt
Tmax
dI
βTV − δ ρ I,
dt
1.2
dV
qIt − τ − cV.
dt
All the biological meanings of parameters are same as system 1.1. The time delay is
introduced in the system describing the dynamics of “window period,” that is, the released
virus term of infected CD4 T cells is changed from ρI to qIt − τ.
The initial conditions of system 1.2 are
T0 ϕ10 ,
Iθ ϕ2 θ,
ϕ10 ≥ 0,
V 0 ϕ30 ,
ϕ2 0 ≥ 0,
ϕ30 ≥ 0.
θ ∈ −τ, 0,
1.3
With a standard argument given in 16, it easy to show that the solution Tt, It, V t with
initial conditions 1.2 exists and is unique for all t ≥ 0.
Discrete Dynamics in Nature and Society
3
Theorem 1.1. The solution of system 1.2 is positive and boundary.
Proof. First we proof the positivity of the solution of 1.2. From the first equation of 1.2,
we obtain
T
dT
≥ aT 1 −
− dT − βTV.
dt
Tmax
1.4
Solving it, we obtain
Tt ≥ T0 exp
t Tt
a 1−
− βV t dt − dt ≤ 0.
Tmax
0
1.5
From the second and the third equation, we obtain
It ≥ I0 exp − δ ρ t ≥ 0,
V t ≥ V 0 exp −ct ≥ 0.
1.6
Therefore, the solution of 1.2 is positive.
Second, we will prove the boundary of the solution of 1.2. Define d min{d, δ} and
L T I. Adding the first equation and the second equation of 1.2, it is easy to see
Tt
dL
≤ s aT 1 −
− dL;
dt
Tmax
1.7
if L ≥ Tmax , 1.7 become the following:
dL
≤ s − dL.
dt
1.8
.
It is easy to get L ≥ s/d M1 . If L ≤ Tmax , 1.7 become the following:
Tt
dL
≤ s aT 1 −
− dL
dt
Tmax
Lt
≤ s aL 1
− dL.
Tmax
1.9
Tmax } . M2 . Hence, for ε > 0 sufficiently small, there is a T1 such
It leads to L ≤ 2 max{s/d,
that if t > T1 , Tt ≤ M ε, It ≤ M2 ε.
Again, for ε > 0 sufficiently small, we drive from the third equation of system 1.2
that for t > T1 τ
dV
≤ qM2 ε − cV.
dt
1.10
4
Discrete Dynamics in Nature and Society
A comparison argument shows that
V ≤
qM2 ε
.
c
1.11
Since this is true for arbitrary ε > 0, it follows that V ≤ qM2 /c. If we set M max{M2 ,
qM2 /c}, such that S ≤ M, I ≤ M, V ≤ M. Hence, the solution of system 1.2 is boundary.
2. Equilibria Stability and Hopf Bifurcation
First we find all biologically feasible equilibria admitted by the system 1.2 and then study
the dynamics of the system around each equilibrium. We introduce the reproduction number
of differential-delay model 1.2, which is given by a similar expression
R0 βqT0
.
c δρ
T
T0
2.1
The R0 stands if one virus is introduced in a population of uninfected cells which infect the
total number of secondary infectious during their infectious period 1/cδ ρ.
The equilibria of the system 1.2 are as follows:
i uninfected equilibrium E0
a − d2 4as/Tmax ;
T0 , 0, 0, where T 0
Tmax /2aa − d ii an infected equilibrium E T , I, V , which exists if R0 > 1, where
c δρ
,
T
βq
T
1
,
s − dT aT 1 −
I
δ
Tmax
V q
I.
c
2.2
Following the analysis in 5, we can see that, if R0 > 1, then the infection-free equilibrium E0
is unstable, and incorporation of a delay will not change the instability.
Next, we focus on investigating the local stability and Hopf bifurcation of the positive
equilibrium of 1.2. To study the local stability of the positive equilibrium E T , I, V , we
consider the linearization of system 1.2 at the point E. Let us define
Tt x T,
It y I,
V t z V .
2.3
The following transcendental characteristic equation is obtained:
λ3 a1 λ2 a2 λ a3 e−λτ b1 λ b2 ,
2.4
Discrete Dynamics in Nature and Society
5
where the coefficients in this equation are expressed as follows:
a1 c δ ρ d − a 2aT
βV ,
Tmax
2aT
a2 c δ ρ c δ ρ d − a βV − ρβV ,
Tmax
a3 c δ ρ
2aT
d−a
βV
Tmax
2.5
− cβρV ,
b1 qβT ,
b2 qβT
2aT
d−a
Tmax
.
For τ 0, the characteristic equation 2.4 reduces to the following
λ3 a1 λ2 a2 − b1 λ a3 − b2 0.
2.6
By the Routh-Hurwitz Criterion, it follows that all eigenvalues of 2.6 have negative real
parts if and only if
a1 > 0,
a2 − b1 > 0,
a3 − b2 > 0,
a1 a2 − b1 − a3 − b2 > 0.
2.7
If R0 > 1, and d − a 2aT /Tmax > 0,
a1 > 0,
a2 − b1 cδρ
2aT
d−a
Tmax
c δβV
> 0,
a3 − b2 cδβV > 0,
a1 a2 − b1 − a3 − b2 2aT
βV
cδρd−a
Tmax
cδρ
2aT
d−a
Tmax
c δβV
− cδβV > 0.
2.8
We know that all eigenvalues of 2.6 have negative real parts.
Clearly, if λ iw with w > 0 is a root of 2.4. This is the case if and only if w satisfies
the following equation:
−iw3 − a1 w2 ia2 w a3 cos wτ i sin wτib1 w b2 .
2.9
6
Discrete Dynamics in Nature and Society
Separating the real and imaginary parts, we have the following system that must be satisfied:
a3 − a1 w2 b2 cos wτ − b1 w sin wτ,
a2 w − w3 b1 w cos wτ b2 sin wτ.
2.10
We eliminate the trigonometric functions by squaring both sides of each equation above and
adding the resulting equations. We obtain the following sixth degree equation for w:
w6 a21 − 2a2 w4 a22 − 2a1 a3 − b12 w2 a23 − b22 0.
2.11
Letting z w2 , then 2.11 becomes a third order equation in z:
z3 m1 z2 m2 z m3 0,
2.12
where we have used the following notation for the coefficients of 2.12:
m1 a21 − 2a2 ,
m2 a22 − 2a1 a3 − b12 ,
m3 a23 − b22 .
2.13
In order to show that the endemic equilibrium E is locally stable we have to show that 2.12
does not have a positive real solution which might give the square of w, that is, that 2.4
cannot have purely imaginary solutions. The lemma below establishes conditions leading to
that result.
Lemma 2.1 see 10. For the polynomial equation 2.12
i if m3 < 0, then 2.12 has at least one positive root;
ii if m3 ≥ 0 and Δ m21 − 3m2 ≤ 0, then 2.12 has no positive root;
iii if m3 ≥ 0 and Δ m21 − 3m2 > 0, then 2.12 has positive root if and only if z∗1 √
−m1 Δ/3, and hz∗1 ≤ 0, where hz z3 m1 z2 m2 z m3 .
Lemma 2.2 see 10. For the polynomial equation 2.12
i if m3 ≥ 0 and Δ m21 − 3m2 ≤ 0, then all roots with positive real parts of 2.4 have the
same sum as those of the polynomial equation 2.12 for all τ;
ii if m3 < 0 or m3 ≥ 0, Δ m21 − 3m2 > 0, and hz∗1 ≤ 0, then all roots with positive real
parts of 2.4 have the same sum as those of the polynomial equation 2.12 for τ ∈ 0, τ0 .
Summarizing the above analysis and noting that
m3 a23 − b22 ≥ 0,
we have the following theorem.
2.14
Discrete Dynamics in Nature and Society
7
Theorem 2.3. Assume that
i R0 > 1;
ii d − a 2aT /Tmax > 0;
iii m3 ≥ 0 and m21 − 3m2 ≤ 0.
Then the endemic equilibrium E of 2.4 is absolutely stable, that is, E is asymptotically stable for all
values of the delay τ ≥ 0.
Now, we turn to the bifurcation analysis. We use the delay τ as bifurcation parameter.
We view the solutions of 2.4 as functions of the bifurcation parameter τ. Let λτ ητ iwτ be the eigenvalue of 2.10 such that for some initial value of the bifurcation parameter
τ0 we have ητ0 0, and wτ0 w0 without loss of generality we may assume w0 > 0.
From 2.10 we have
−b1 w04 a2 b1 − a1 b2 w02 a3 b2
2jπ
1
arccos
,
τj 2 2
2
w0
w0
b1 w 0 b2
j 0, 1, . . . .
2.15
Also, we can verify that the following transversal condition
d Re λτ >0
dτ
ττ0
2.16
holds. By continuity, the real part of λτ becomes positive when τ > τ0 and the steady state
becomes unstable. Moreover, a Hopf bifurcation occurs when τ passes through the critical
value τ0 see 16.
To establish the Hopf bifurcation at τ τ0 , we need to show that d Re λτ/dτ|ττ0 > 0.
Differentiating 2.4 from both sides with respect to τ, it follows that
3λ2 2a1 λ a2
dλ
−τe−λτ b1 λ b2 e−λτ b1
− λe−λτ b1 λ b2 .
dτ
dτ
dλ
2.17
This gives
dλ
dτ
−1
3λ2 2a1 λ a2 τe−λτ b1 λ b2 − e−λτ b1
−λe−λτ b1 λ b2 τ
3λ2 2a1 λ a2
b1
−
−λτ
λb
λ
b
λ
−λe b1 λ b2 1
2
2λ3 a1 λ2 − a3
b2
τ
−
− .
−λ2 λ3 a1 λ2 a2 λ a3 λ2 b1 λ b2 λ
2.18
8
Discrete Dynamics in Nature and Society
Thus,
−1 dRe λ dλ
Sign
Sign Re
dτ
dτ
λiw0
λiw0
2λ3 a1 λ2 − a3
Sign Re
−λ2 λ3 a1 λ2 a2 λ a3 λiw0
−2w03 i − a1 w02 − a3
−b2
Re 2
λ b1 λ b2 λiw0
−b2
Sign Re
Re
−w02 b1 w0 i b2 w02 −w03 i − a1 w02 a2 w0 i a3
⎧
⎨
⎫
⎬
2w06 a21 − 2a2 w04 − a23
b22
Sign
⎩ w2 a w2 − a 2 w3 − a w 2
w02 b22 b12 w02 ⎭
1 0
3
2 0
0
0
6 2
2w0 a1 − 2a2 w04 b22 − a23
1
.
2 Sign
w0
b22 b12 w02
2.19
Since
gz 2σ 3 a21 − 2a2 σ 2 b22 − a23 ,
2.20
dgz
6σ 2 2 a21 − 2a2 σ.
dz
2.21
thus,
The roots of 2.21 can be expressed as
σ1 0,
σ2 −
m1
.
3
2.22
Noting that
m1 a21 − 2a2
2
cδρ 2aT
d−a
Tmax
2
− 2 δ ρ ρβV > 0,
2.23
hence,
6 2
2w0 a1 − 2a2 w04 b22 − a23
d Re λ 1
> 0.
Sign
dτ ww0 ,ττ0 w02
b22 b12 w02
The above analysis can be summarized into the following theorem.
2.24
Discrete Dynamics in Nature and Society
9
Theorem 2.4. Suppose that R0 > 1. If both m3 ≥ 0 and m21 − 3m2 ≥ 0 are satisfied, then the endemic
equilibrium E of the delay model 1.2 is asymptotically stable when τ < τ0 and unstable when τ > τ0 ,
where
−b1 w04 a2 b1 − a1 b2 w02 a3 b2
1
arccos
τ0 ,
w0
b12 w02 b22
2.25
when τ τ0 , a Hopf bifurcation occurs, that is, a family of periodic solutions bifurcates from E as τ
passes through the critical value τ0 .
In this way, using time delay as a bifurcation parameter, Theorem 2.4 indicates that the
delay model could exhibit Hopf bifurcation at a certain value τ0 of the delay if the parameters
satisfy conditions. They show that a time delay in the infected-to-viral cells transmission term
can destabilize the system and periodic solutions can arise through Hopf bifurcation.
3. Direction and Stability of the Hopf Bifurcation
In this section, we will study the direction, stability, and the period of the bifurcating
periodic solutions. The approach we used here is based on the normal form approach, the
center manifold theory, and delay differential equation theory see 16–19. Throughout
this section, we always assume that system 1.2 undergoes Hopf bifurcation at the positive
equilibrium E S, I, V , for τ τ k , and then iw is corresponding purely imaginary roots of
the characteristic equation at the positive equilibrium E S, I, V .
Letting
Tt u1 t T ,
It u2 t I,
V t u3 t V ,
xi t ui τt,
τ τ k μ,
3.1
system 1.2 is transformed into an functional differential equation FDE in C C−1, 0,
R3 as
dx
Lμ xt ft, xt ,
dt
3.2
where xt x1 t, x2 t, x3 tT ∈ R3 , Lμ : C → R, and f : R×C → R are given, respectively,
by
⎛
⎞
⎞
⎛
2aT
φ1 0
−
0
−βT
a
−
d
−
βV
⎜
⎟
⎜
⎟
⎟⎜
Tmax
⎟⎜φ2 0⎟
Lμ φ τ k μ ⎜
⎜
⎠
⎟
⎝
−δ βT ⎠
βV
⎝
φ3 0
0
0 −c
⎛
⎞
⎞⎛
0 0 0
φ1 −1
⎜
⎟
⎟⎜
⎟
⎟⎜
τk μ ⎜
⎝0 0 0⎠⎝φ2 −1⎠,
0 p 0
φ3 −1
3.3
10
Discrete Dynamics in Nature and Society
⎛
⎞
φ12 0 − βφ1 0φ3 0
⎜ Tmax
⎟
⎟.
f μ, φ τ k μ ⎜
βφ1 0φ3 0
⎝
⎠
−
a
3.4
0
By the Riesz representation theorem, there exists a function ηθ, μ of bounded variation for
θ ∈ −1, 0, such that
Lμ φ 0
−1
dηθ, 0φθ,
for φ ∈ C.
3.5
In fact, we can choose
⎛
⎞
⎞
⎛
2aT
0 −βT ⎟ φ1 0
⎜a − d − βV −
⎜
⎟⎜
⎟
Tmax
⎟⎜φ2 0⎟
η θ, μ τ k μ ⎜
⎜
⎟⎝
⎠
βV
−δ
βT
⎝
⎠
φ3 0
0
0 −c
⎛
⎞⎛
⎞
0 0 0
φ1 −1
⎜
⎟⎜
⎟
⎟⎜
⎟
− τk μ ⎜
⎝0 0 0⎠⎝φ2 −1⎠δθ 1,
0 p 0
φ3 −1
3.6
where δ is the Dirac delta function. For φ ∈ C−1, 0, R3 , define
⎧
⎪ dφθ
,
⎨
dθ
Aμ φ ⎪
⎩dηθ, sφθ,
⎧
⎨0,
R θ, φ ⎩ f θ, φ ,
θ ∈ −1, 0,
θ0
3.7
θ ∈ −1, 0,
θ 0.
Then system 3.2 is equivalent to
ẋt Aθxt Rθxt ,
3.8
where xθ xt θ, for θ ∈ −1, 0.
For ψ ∈ C1 0, 1, R3 ∗ , define
⎧
dφs
⎪
⎪
⎪
s ∈ 0, 1,
⎨− ds ,
A∗ ψs 0
⎪
⎪
⎪
dηT t, 0ψ−t, s 0,
⎩
−1
3.9
Discrete Dynamics in Nature and Society
11
and a bilinear inner product
'
(
ψs, φθ ψ0φ0 −
0 θ
−1
ψξ − θdηθφξdξ,
3.10
ξ0
where ηθ ηθ, 0. Then A0 and A∗ are adjoint operators. By the discussion in Section 2,
we know that ±iwτ k are eigenvalues of A0. Thus, they are also eigenvalues of A∗ . We
first need to compute the eigenvectors of A0 and A∗ corresponding to iwτ k and −iwτ k ,
respectively.
)0
∗ k
Suppose that qθ −1 1, α, βT eiw τ θ is the eigenvector of A0 corresponding to
iw0 τk , then
A0q0 iwτ k q0.
A0qθ iwτ k qθ,
3.11
It follows from the definition of A0 and 3.3, 3.5, and 3.6 that
⎞
⎤
⎛
⎞
2aT
0 0 0 ⎥
0 −βT ⎟
⎢⎜a − d − βV −
⎟ ⎜
⎢⎜
Tmax
⎟⎥
k ⎢⎜
k
⎟
⎜
⎟⎥
τ ⎢⎜
⎟ ⎝0 0 0⎠⎥q0 iwτ q0.
βV
−δ
βT
⎠
⎣⎝
⎦
0 p 0
0
0 −c
⎡⎛
3.12
That is,
⎛
2aT
⎜iw − a d βV T
⎜
max
τ k⎜
⎜
−βV
⎝
0
⎞
0
iw δ
−qe−iwτ
k
⎛ ⎞ ⎛ ⎞
0
βT ⎟ 1
⎟⎜ ⎟ ⎜ ⎟
⎟⎜ α ⎟ ⎜0⎟.
⎝ ⎠ ⎝ ⎠
−βT ⎟
⎠
0
β1
iw c
3.13
Thus, we can easily obtain
T
q0 1, α, β1 ,
3.14
where
iw
−
a
d
βV
2aT
/T
max
iw c
α−
,
qe−iwτ k
βT
β1 −
iw − a d βV 2aT /Tmax
βT
.
3.15
12
Discrete Dynamics in Nature and Society
Suppose that q∗ s D1, α∗ , β1∗ eiwτ s ,
k
⎛
2aT
0
⎜−iw − a d βV T
⎜
max
k ∗ ∗ ⎜
τ D 1, α , β1 ⎜
−βV
−iw δ
⎝
qe−iwτ
0
k
⎞
βT
⎟
⎟ ⎟ 0 0 0 ,
−βT ⎟
⎠
−iw c
3.16
where
α∗ −iw − a d βV 2aT /Tmax
βV
−iw − a d βV 2aT /Tmax
−iw
δ
β1∗ −
.
qe−iwτ k
βV
3.17
,
In order to assume q∗ θ, qθ 1, we need to determine the value of D. From 3.10,
we have
'
(
T
q θ, qθ D 1, α∗ , β1∗ 1, α, β1 −
∗
D 1 αα∗ β1 β1∗ −
0 θ
−1
0 θ
−1
T
k
k
D 1, α∗ , β∗ e−iwτ θ dηθ 1, α, β eiwτ ξ dξ
ξ0
∗
D 1, α∗ , β θeiwτ
k
T
θ
dηθ 1, α, β1
ξ0
⎧
⎛
⎞⎛ ⎞⎫
0 0 0
1 ⎪
⎪
⎪
⎪
⎨
⎟⎬
⎜
⎟
⎜
k
∗
∗
k −iwτ
∗ ∗ ⎜
⎟
⎟
⎜
D 1 αα β1 β1 τ e
1, α , β1 ⎝0 0 0⎠⎝ α ⎠
⎪
⎪
⎪
⎪
⎭
⎩
0 q 0
β1
⎧
⎛ ⎞⎫
1 ⎪
⎪
⎪
⎪
⎨
⎜ ⎟⎬
∗
∗
k −iwτ k ∗
⎟
D 1 αα β1 β1 τ e
0, β1 q, 0 ⎜
α
⎝ ⎠⎪
⎪
⎪
⎪
⎩
⎭
β1
0
1
k
D 1 αα∗ β1 β1∗ τ k e−iwτ αβ∗ q .
3.18
Thus, we can choose D as
D
1
αα∗
β1 β1∗
1
.
τ k e−iwτ k αβ1∗ q
3.19
In the remainder of this section, we use the same notations as in 19; we first compute the
coordinates to describe the center manifold C0 at μ 0. Let xt be the solution of 3.8 when
μ 0. Define
'
(
zt q∗ , xt ,
2
3
Wt, θ xt θ − 2 Re ztqθ .
3.20
Discrete Dynamics in Nature and Society
13
On the center manifold C0 , we have
Wt, θ Wzt, zt, θ,
3.21
z2
z3
z2
W11 θzz W02 θ W30 θ · · · ,
2
2
6
3.22
where
Wzt, zt, θ W20 θ
z and z are local coordinates for center manifold C0 in the direction of q and q∗ . Note that W
is real if x is real. We only consider real solutions. For solution xt ∈ C0 of 3.8, since μ 0,
we have
2
3 .
żt iw0 τ k z q∗ 0f 0, Wz, z, 0 2 Re zq0 iw0 τ k z q∗ 0f0 z, z.
3.23
We rewrite this equation as
żt iw0 τ k zt gz, z g20
z2
z2
z2 z
g11 zz g02 g21
··· ,
2
2
2
3.24
where
gz, z q∗ 0f0 z, z g20
z2
z2
z2 z
g11 zz g02 g21
··· .
2
2
2
3.25
It follows from 3.20 and 3.23 that
2
3
xt θ wt, θ 2 Re ztqθ
wt, θ ztqθ ztq θ
w20 θ
T
T
z2 z2
k
k
w11 zz w02 1, α, β1 eiwτ θ z 1, α, β1 e−iwτ θ z · · · .
2
2
It follows together with 3.4 that
f0 z, z f0, xt ⎛
⎜
⎜
τ k⎜
⎜
⎝
−
⎞
2
x1t
0 − βx1t 0x3t 0
⎟
Tmax
⎟
⎟
βx1t 0x3t 0
⎟
⎠
0
a
3.26
14
⎛
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
τ k⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎝
Discrete Dynamics in Nature and Society
⎞
z2
z2
a
1
1
w20 0 w11 0zz w02 10 z z · · · ⎟
−
⎟
Tmax
2
2
⎟
⎟
⎟
⎟
2
2
z
z
⎟
1
1
⎟
× w20 0 w11 0zz w02 10 z z · · ·
⎟
2
2
⎟
⎟
⎟
⎟
2
2
z
z
⎟
1
1
⎟
−β w20 0 w11 0zz w02 10 z z · · ·
⎟
2
2
⎟
⎟
⎟
⎟
2
2
⎟
z
z
3
3
3
× w20 0 w11 0zz w02 0 β1 z β1 z · · · ⎟
⎟
2
2
⎟
⎟
⎟
⎟
2
2
⎟
z
z
1
1
⎟
β w20 0 w11 0zz w02 10 z z · · ·
⎟
2
2
⎟
⎟
⎟
⎟
2
⎟
z2
z
3
3
3
× w20 0 w11 0zz w02 0 β1 z β1 z · · · ⎟
⎟
2
2
⎟
⎠
0
⎛
⎞
2
2
a
a
z
z
a
2 −
−2 −
− ββ1
− ββ1
β Re β1
zz ⎟
⎜ 2 −T
2
Tmax
2
Tmax
⎜
⎟
max
⎜
⎟
⎜
⎟
⎜
⎟
a
1
1
3
3
⎜
⎟
− −
w20 0 2w11 0 w20 0 2w11 0
⎜
⎟
Tmax
⎜
⎟
⎜
⎟
⎜
⎟
z2 z
⎜
⎟
1
1
3
3
⎜
⎟
···
−β β1 w20 0 2β1 w11 0 w20 0 2w11 0
⎜
⎟
2
⎟.
τ k⎜
⎜
⎟
⎜
⎟
2
2
⎜
⎟
⎜ 2ββ z ββ z 2β Re β zz
⎟
⎜
⎟
1
1
1
⎜
⎟
2
2
⎜
⎟
⎜
⎟
z2 z
⎜
⎟
1
1
3
3
⎜
⎟
β1 w20 0 2β1 w11 0 w20 0 2w11 0
···
⎜
⎟
2
⎜
⎟
⎝
⎠
0
3.27
Hence one can obtain
gz, z g20
z2
z2
z2 z
g11 zz g02 g21
···
2
2
2
q∗ 0f0 z, z
Discrete Dynamics in Nature and Society
D 1, α, β1 τ k
15
⎛
2
2
a
a
z
z
a
2 −
−2 −
− ββ1
− ββ1
β Re β1 zz
⎜ 2 −
⎜
Tmax
2
Tmax
2
Tmax
⎜
⎜
⎜
a
1
1
3
3
⎜
−
−
w
2w
w
2w
0
0
0
0
20
20
11
11
⎜
Tmax
⎜
⎜
z2 z
⎜
1
1
3
3
⎜
−β
···
β
w
w
2β
w
2w
0
0
0
0
1 20
1 11
20
11
·⎜
2
⎜
⎜
2
2
⎜
⎜ 2ββ z ββ z 2β Re β zz
1
1
1
⎜
2
2
⎜
⎜
z2 z
⎜
1
1
3
3
⎜
β1 w20 0 2β1 w11 0 w20 0 2w11 0
···
⎜
2
⎝
0
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎠
2
2
a
a
z
a
z
−2
−2 −
− ββ1
ββ1
β Re β1 zz
Dτ 2 −
Tmax
2
Tmax
2
Tmax
k
a 1
1
3
3
w20 0 2w11 0 w20 0 2w11 0
− −
Tmax
−β
Dατ
k
2ββ1
1
β1 w20 0
1
2β1 w11 0
3
w20 0
z2 z
3
2w11 0
2
z2
z2
ββ1 2β Re β1 zz
2
2
z2 z
1
1
3
3
β1 w20 0 2β1 w11 0 w20 0 2w11 0
2
··· .
3.28
Comparing the coefficients with 3.25, we have
a
ββ1 2Dατ k ββ1 ,
g20 −Dτ k 2 −
Tmax
a
β Re β1
2Dατ k β Re β1 ,
g11 −2Dτ k −
Tmax
a
k
ββ1 2Dατ k ββ1 ,
g02 2Dτ −
Tmax
a 1
1
3
3
g21 −Dτ k −
w20 0 2w11 0 w20 0 2w11 0
Tmax
1
1
3
3
−β β1 w20 0 2β1 w11 0 w20 0 2w11 0
1
1
3
3
Dαβ β1 w20 0 2β1 w11 0 w20 0 2w11 0 .
3.29
16
Discrete Dynamics in Nature and Society
Since there are W20 θ and W11 θ in g21 , we still need to compute them
ẇ ẋt − żq − żq
⎧
0
1
⎪
⎨Aw − 2 Re q∗ 0f0 q0 ,
0
1
⎪
⎩Aw − 2 Re q∗ 0f0 q0 f0 ,
θ ∈ −1, 0
θ0
3.30
.
Aw Hz, z, θ,
where
Hzt, zt, θ H20 θ
z2
z3
z2
H11 θzz H02 θ H30 θ · · · .
2
2
6
3.31
From 3.30 and 3.31, we have
A0wt, θ − ẇ −Hz, z, θ −H20 θ
z2
z2
− H11 zz − H02 · · · .
2
2
3.32
In view of 3.32, one can obtain
A0wt, θ A0w20
z2
A0w11 zz · · · ,
2
ẇ wz ż wz ż
w20 θz iwτ k z gz, z
w11 θ
3.33
1
0
iwτ k z gz, z z z −iwτ k z gz, z · · ·
2iwτ k w20 θ
z2
··· .
2
It follows from 3.32 and 3.33 that
z2
A0w − ẇ A0 − 2iwτ k I w20 θ A0w11 θzz · · ·
2
z2
z2
−H20 − H11 θzz − H02 θ − · · · .
2
2
3.34
Substituting the corresponding series into 3.30 and comparing the coefficients, we obtain
A0 − 2iwτ k I w20 θ −H20 θ,
A0w11 θ −H11 θ.
3.35
Discrete Dynamics in Nature and Society
17
From 3.30, we know that, for all θ ∈ −1, 0,
2
3
Hz, z, θ −2 Re q∗ f0 z, z
−q∗ f0 z, zqθ − q∗ θf 0 z, zqθ
−gz, zgθ − gz, zqθ
3.36
z2 − g02 qθ g 02 qθ
− g11 qθ g 11 qθ zz · · · .
2
Comparing the coefficients with 3.31 gives that
H20 θ − g02 qθ g 02 qθ ,
3.37
H11 θ − g11 qθ g 11 qθ .
3.38
From 3.35 and 3.37 and the definition of A0, we have
ẇ20 θ 2iw20 g20 qθ g 20 qθ.
3.39
k
Note that qθ q0eiwτ θ , hence
w20 ig 20
ig20
k
k
k
q0eiwτ θ q0eiwτ θ e2iwτ θ E1 .
k
wτ
3wτ k
3.40
Similarly, from 3.35 and 3.38 and the definition of A0, we have
w11 −
ig
ig11
qθ 11k qθ E2 ,
k
wτ
wτ
3.41
2
2iwτ k w20 θ −2g20 q0 − g20 q0 2iwτ k E1 .
3
In what follows, we shall seek appropriate E1 and E2 . From the definition of A and 3.35, we
obtain
0
−1
dηθw20 θ 2iwτk w20 0 − H20 0,
0
−1
dηθw11 θ −H11 0,
3.42
3.43
18
Discrete Dynamics in Nature and Society
where gθ g0, θ. By 3.37 and 3.38, we have
⎛
a
−
ββ1
⎜ Tmax
⎜
H20 0 −g20 q0 − g 20 q0 − 2τ k ⎜
ββ1
⎝
⎞
⎟
⎟
⎟,
⎠
3.44
0
⎛
a
−
ββ1
⎜ Tmax
⎜
H11 0 −g11 q0 − g 11 q0 − 2τ k ⎜ β Re β1
⎝
⎞
⎟
⎟
⎟.
⎠
3.45
0
Substituting 3.42 into 3.44 and noticing that
2iwτ k −
0
⎛
−
a
ββ1
⎜ Tmax
k
⎜
e2iwτ θ dηθ E1 2τ k ⎜
ββ1
⎝
−1
⎞
⎟
⎟
⎟
⎠
3.46
0
which leads to
⎞
⎞
⎛ 1⎞
⎛ a
2aT
ββ1
−
0
βT ⎟ E1
⎜2iw − a d βV ⎟⎜ ⎟
⎜
⎟
⎜ Tmax
Tmax
⎟⎜ 1 ⎟
⎜
⎟
⎜
⎟⎜E2 ⎟ 2⎜ β Re β1 ⎟,
⎜
−βV
2iw δ −βT ⎟⎝ ⎠
⎜
⎠
⎝
⎠
⎝
1
k
E3
0
0
−qeiwτ 2iw c
⎛
3.47
it follows that
a
ββ1
0
βT −
Tmax
2 1
,
E1 ββ
2iw
δ
−βT
1
A
k
iwτ
0
−qe
2iw c
2aT
a
−
ββ1
βT 2iw − a d βV T
T
max
max
2
E21 ,
ββ1
−βT −βV
A 0
0
2iw c
a
2iw − a d βV 2aT
0
−
ββ1 Tmax
Tmax
2 E31 ,
−βV
2iw δ
ββ1
A k
0
−qeiwτ
0
3.48
Discrete Dynamics in Nature and Society
19
where
2iw − a d βV 2aT
0
βT Tmax
A
−βV
2iw δ −βT .
iwτ k
0
−qe
2iw c
3.49
Similarly, substituting 3.43 into 3.45, we can get
⎛
2aT
⎜−a d βV T
max
⎜
⎜
⎜
−βV
⎝
0
⎞⎛ ⎞
⎞
⎛ a
2
ββ1
−
βT ⎟ E1
⎟
⎟
⎜ Tmax
⎟⎜
⎟
⎜
2⎟
⎟⎜
E
2
⎜
⎟
⎜ β Re β1 ⎟,
⎟
2
δ −βT ⎠⎝ ⎠
⎠
⎝
2
E
0
3
−q c
0
3.50
and hence,
a
ββ1
0
βT −
Tmax
2
,
E12 β Re β1
2iw
δ
−βT
B
k
0
−qeiwτ 2iw c
2iw − a d βV 2aT − a ββ1
βT Tmax
Tmax
2
,
E22 −βV
β Re β1
−βT B
0
0
2iw c
3.51
2aT
a
0
−
ββ1 2iw − a d βV T
T
max
max
2
E32 ,
−βV
2iw δ
βReβ1 B iwτ k
0
−qe
0
where
−a d βV 2aT 0 βT T
max
.
B
−βV
δ
−βT
0
−q c 3.52
20
Discrete Dynamics in Nature and Society
Different treatment rate ρ
I
Different treatment rate ρ
1000
800
800
600
600
T 400
400
200
200
0
0
0
200
400
600
800
1000
0
200
400
t
600
800
1000
t
ρ1 0.01
ρ2 0.61
ρ1 0.01
ρ2 0.61
a
b
Different treatment rate ρ
50000
40000
V 30000
20000
10000
0
0
200
400
600
800
1000
t
ρ1 0.01
ρ2 0.61
c
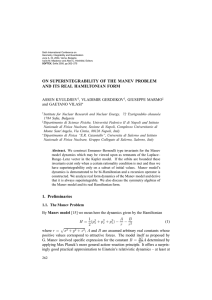
Figure 1: a–c show that uninfected cells, infected cells, and virus converge to their equilibrium with
parametric values as stated in the text with τ 0.75. They show that the equilibrium is asymptotically
stable.
It follows from 3.29 that g21 can be expressed explicitly. Thus, we can compute the following
values:
i
c1 0 2w0 τ k
σ2 −
g2
2
g11 g20 − 2g11
− 02
2
,
Rec1 0
,
Re λ
k τjk
3.53
β2 2 Rec1 0,
T2 −
Imc1 0 σ2 Im λ
k τjk
wτ k
,
k 0, 1, 2, . . . .
Discrete Dynamics in Nature and Society
I
21
τ 2.01
800
700
600
500
400
300
200
100
0
τ 2.01
τ 2.01
0
200
400
600
350
300
250
200
150
100
50
0
T
800
1000
τ 2.01
0
200
400
t
600
800
1000
t
T
I
a
b
τ 2.01
35000
30000
25000
V 20000
15000
10000
5000
0
τ 2.01
0
200
400
600
800
1000
t
V
c
Figure 2: a–c are the oscillations of uninfected cells, infected cells, and virus.
By the result of Hassard et al. 19, we have the following.
Theorem 3.1. In 3.53, the sign of σ2 determined the direction of Hopf bifurcation: if σ2 > 0, < 0,
then the Hopf bifurcation is supercritical (subcritical) and the bifurcating periodic solution exists for
τk > τjk < τjk . β2 determines the stability of the bifurcating periodic solution: the bifurcating periodic
solution is stable (unstable) if β2 < 0 > 0, and T2 determines the period of the bifurcating periodic
solution: the period increases (decreases) if T2 > 0 < 0.
4. Simulation
In this section, we use numerical simulations to illustrate the theoretical results obtained in
previous sections. As an example, we take the parameter values as follows: s 5, a 0.97,
d 0.0002, Tmax 1200, δ 0.26, q 120, c 2.4, β 0.00024, τ 0.75, and ρ 0.01. By
using the classical implicit format solving the delay differential equations and the method of
steps for differential equations, we can solve the numerical solutions of 2.4 via the software
package DEDiscover.
Simulation of the model in this situation produces stable dynamics as is presented
in Figure 1. Plots a–c of Figure 1 show that uninfected cells, infected, cells and virus
converge to their equilibrium with the parametric values. They show that the equilibrium
E under some conditions see Theorem 2.3 is asymptotically stable.
22
Discrete Dynamics in Nature and Society
τ 0.45
τ 0.45
120
250
200
I
100
80
τ 0.45
150
τ 0.45
60
40
T
100
50
20
0
0
0
200
400
600
800
1000
0
200
400
t
600
800
1000
t
I
T
a
b
τ 0.45
12000
10000
8000
V
6000
4000
2000
0
τ 0.45
0
200
400
600
800
1000
t
V
c
Figure 3: a–c show the uninfected cells, infected cells and virus with ρ1 0.01 and ρ2 0.61. They show
the cure rate is a important parameter.
Next, we use a same set of parameter values as those in Figure 1, but we vary the value
of τ 2.01. Thus the conditions of Theorem 2.4 are satisfied. Then the system 2.4 has an
asymptotically stable periodic orbit see Figure 2. Plots a–c of Figure 2 are the oscillations
of uninfected cells, infected cells, and virus if τ attend a certain level see Theorem 2.4.
Figure 2 shows that there is a periodic solution.
We also find that the infection would always keep stability when the cure rate ρ is
larger. This can be analyzed from the expression of R0 and the conditions of Theorem 2.3. For
example, we know that the oscillations of uninfected cells, infected cells and virus in Figure 3.
And if we select ρ1 0.01, ρ2 0.61, and τ 2.01 and the other parameter values are same
in Figure 1, then the infection would be stale see Figure 3. Thus we can claim that the cure
rate ρ is a very important parameter. The results show that if we improve the cure rate, we
may control the disease.
5. Conclusion
An epidemic model of HIV infection of CD4 T cells with virus released period is studied.
Mathematical analyses of the model equations with regard to dynamic behaviors of
equilibria, Hopf bifurcation are analyzed. The basic reproduction number is obtained. In
5, if R0 < 1, the disease-free equilibrium is globally stable and the disease dies out. If
R0 > 1, a unique endemic equilibrium exists, and it is globally asymptotically stable. In our
Discrete Dynamics in Nature and Society
23
model, we determine criteria for Hopf bifurcation using the time delay as the bifurcation
parameter based on the differential-delay model. We show that positive equilibrium is locally
asymptotically stable when time delay is suitably small, while a Hopf bifurcation can occur
as the delay increases. Hopf bifurcation has helped us in finding the existence of a region of
instability in the neighborhood of a nonzero endemic equilibrium where the population will
survive undergoing regular fluctuations. We should discuss the length of the delay which
impact on the stability of our model.
Acknowledgments
This paper is supported by the NSF of China no. 10971178, no. 10911120387, no. 11071283,
the Sciences Foundation of Shanxi 2009011005-3, and the Sciences Exploited Foundation of
Shanxi 20081045.
References
1 A. S. Perelson, P. Essunger, Y. Cao et al., “Decay characteristics of HIV-1-infected compartments
during combination therapy,” Nature, vol. 387, no. 6629, pp. 188–191, 1997.
2 A. S. Perelson and P. W. Nelson, “Mathematical analysis of HIV-1 dynamics in vivo,” SIAM Review,
vol. 41, no. 1, pp. 3–44, 1999.
3 A. V. M. Herz, S. Bonhoeffer, R. M. Anderson, R. M. May, and M. A. Nowak, “Viral dynamics in vivo:
limitations on estimates of intracellular delay and virus decay,” Proceedings of the National Academy of
Sciences of the United States of America, vol. 93, no. 14, pp. 7247–7251, 1996.
4 T. B. Kepler and A. S. Perelson, “Cyclic re-entry of germinal center B cells and the efficiency of affinity
maturation,” Immunology Today, vol. 14, no. 8, pp. 412–415, 1993.
5 X. Zhou, X. Song, and X. Shi, “A differential equation model of HIV infection of CD4 T-cells with
cure rate,” Journal of Mathematical Analysis and Applications, vol. 342, no. 2, pp. 1342–1355, 2008.
6 R. V. Culshaw and S. Ruan, “A delay-differential equation model of HIV infection of CD4 T-cells,”
Mathematical Biosciences, vol. 165, no. 1, pp. 27–39, 2000.
7 R. V. Culshaw, S. Ruan, and G. Webb, “A mathematical model of cell-to-cell spread of HIV-1 that
includes a time delay,” Journal of Mathematical Biology, vol. 46, no. 5, pp. 425–444, 2003.
8 D. Li and W. Ma, “Asymptotic properties of a HIV-1 infection model with time delay,” Journal of
Mathematical Analysis and Applications, vol. 335, no. 1, pp. 683–691, 2007.
9 J. E. Mittler, B. Sulzer, A. U. Neumann, and A. S. Perelson, “Influence of delayed viral production
on viral dynamics in HIV-1 infected patients,” Mathematical Biosciences, vol. 152, no. 2, pp. 143–163,
1998.
10 Y. Song, M. Han, and J. Wei, “Stability and Hopf bifurcation analysis on a simplified BAM neural
network with delays,” Physica D, vol. 200, no. 3-4, pp. 185–204, 2005.
11 J. E. Marsden and M. McCracken, The Hopf Bifurcation and Its Applications, vol. 19 of Applied
Mathematical Sciences, Springer, New York, NY, USA, 1976.
12 C. Lv and Z. Yuan, “Stability analysis of delay differential equation models of HIV-1 therapy for
fighting a virus with another virus,” Journal of Mathematical Analysis and Applications, vol. 352, no. 2,
pp. 672–683, 2009.
13 X. Zhou, X. Song, and X. Shi, “Analysis of stability and Hopf bifurcation for an HIV infection model
with time delay,” Applied Mathematics and Computation, vol. 199, no. 1, pp. 23–38, 2008.
14 X. Zhou and J. Cui, “Delay induced stability switches in a viral dynamical model,” Nonlinear
Dynamics, vol. 63, no. 4, pp. 779–792, 2011.
15 B. Weber, “Screening of HIV infection: role of molecular and immunological assays,” Expert Review of
Molecular Diagnostics, vol. 6, no. 3, pp. 399–411, 2006.
16 Y. Kuang, Delay Differential Equations with Applications in Population Dynamics, vol. 191 of Mathematics
in Science and Engineering, Academic Press, Boston, Mass, USA, 1993.
24
Discrete Dynamics in Nature and Society
17 S. N. Chow and J. K. Hale, Methods of Bifurcation Theory, vol. 251 of Grundlehren der Mathematischen
Wissenschaften, Springer, New York, NY, USA, 1982.
18 J. K. Hale and S. M. Verduyn Lunel, Introduction to Functional-Differential Equations, vol. 99 of Applied
Mathematical Sciences, Springer, New York, NY, USA, 1993.
19 B. D. Hassard, N. D. Kazarinoff, and Y. H. Wan, Theory and Applications of Hopf bifurcation, vol.
41 of London Mathematical Society Lecture Note Series, Cambridge University Press, Cambridge, UK,
1981.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014