Partial Evaluation for Scienti c Computing: The Supercomputer Toolkit Experience Andrew Berlin
advertisement
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
ARTIFICIAL INTELLIGENCE LABORATORY
A.I. Memo No. 1487
May, 1994
Partial Evaluation for Scientic Computing:
The Supercomputer Toolkit Experience
Andrew Berlin
berlin@parc.xerox.com
Rajeev Surati
raj@martigny.ai.mit.edu
This publication can be retrieved by anonymous ftp to publications.ai.mit.edu.
The pathname for this publication is: ai-publications/1994/AIM-1487.ps.Z
Abstract
We describe the key role played by partial evaluation in the Supercomputer Toolkit, a parallel computing
system for scientic applications that eectively exploits the vast amount of parallelism exposed by partial
evaluation. The Supercomputer Toolkit parallel processor and its associated partial evaluation-based
compiler have been used extensively by scientists at M.I.T., and have made possible recent results in
astrophysics showing that the motion of the planets in our solar system is chaotically unstable.
c Massachusetts Institute of Technology, 1994
Copyright This report describes research done at the Articial Intelligence Laboratory of the Massachusetts Institute of Technology.
Support for the laboratory's articial intelligence research is provided in part by the Advanced Research Projects Agency of
the Department of Defense under Oce of Naval Research contract N00014-92-J-4097 andy by the National Science Foundation
under grant number MIP-9001651. Andrew Berlin was also supported in part by an IBM Graduate Fellowship in Computer
Science.
1 Introduction
a data-independent program has the eect of removing
all data abstractions and program structure, producing
a purely numerical program that fully exposes the lowlevel parallelism inherent in the underlying computation.
For the scientic applications we were targeting, such
as orbital mechanics calculations, partial evaluation of
data-independent calculations produced purely numerical programs containing several thousands of oatingpoint operations, with the potential for parallel execution of 50 to 100 operations simultaneously. However,
the parallelism exposed by partial evaluation is dicult
to exploit, because it is extremely ne-grained, at the
level of individual numerical operations.
In 1989, researchers at M.I.T. and Hewlett-Packard began a joint eort to create the Supercomputer Toolkit ,
a set of hardware and software building blocks to be
used for the construction of special-purpose computational instruments for scientic applications. Earlier
work ([6],[7]) had shown that partial evaluation of numerical programs that are mostly data-independent converts a high-level, abstractly specied program into a
low-level, special-purpose program, providing order-ofmagnitude performance improvement and exposing vast
amounts of low-level parallelism. A central focus of
the Supercomputer Toolkit project was to nd a way
to exploit this extremely ne-grained parallelism. By
combining the performance improvements available from
partial evaluation with novel parallel compilation techniques and a parallel processor architecture specically
designed to execute partially evaluated programs, the
Supercomputer Toolkit system enabled scientists to run
an important class of abstractly-specied programs approximately three orders of magnitude faster than a conventionally compiled program executing on the fastest
available workstation.
This paper presents an overview of the role played
by partial evaluation in the Supercomputer Toolkit system, describes the novel parallelism grain-size adjustment technique that was developed to make eective
use of the ne-grained parallelism exposed by partial
evaluation, and summarizes the various real-world scientic projects that have made use of the Supercomputer
Toolkit system.
3 The Supercomputer Toolkit System
The Supercomputer Toolkit is a parallel processor consisting of eight independent processors connected by two
independent communication busses. The Toolkit system
makes eective use of the parallelism exploited by partial evaluation in two ways. First, within each processor, ne-grain parallelism is used to keep the pipeline of
a oating-point chip set fully utilized. Second, multiple
operations can execute in parallel on multiple processors.
The compilation process consists of four major phases.
The rst phase begins by using partial evaluation to convert each data-independent section of a program into
a data-ow graph that consists entirely of numerical
operations. This is followed by traditional compiler
optimizations, such as constant folding and dead-code
elimination. The second phase analyzes locality constraints within the data-ow graph and groups ne-grain
operations together to form higher grain-size instructions known as regions. In the third phase, criticalpath based heuristic scheduling techniques are used to
assign each coarse-grain region to a processor. Finally,
the region boundaries are broken down, and instructionlevel scheduling is performed to assign computational resources to the ne-grain operations that have been assigned to each processor. A very detailed discussion of
the compiler and all of its phases can be found in [3] and
[5].
Before discussing the details of the Supercomputer
Toolkit architecture and compilation techniques, we
present a set of measurements intended to provide an
idea of the relative importance of the various sources of
performance improvement achieved by the Toolkit system, using a 9-body orbital mechanics program1 as an
example.
1 The performance improvement provided by using
partial evaluation to convert a high-level, dataindepen-dent program into a low-level, purely numerical data-ow graph was measured by expressing the data-ow graph in an rtl-style program expressed in the C programming language, by using
a C vector to store the numerical value produced
by each node in the dataow graph. Comparison
of this low-level (partially evaluated) C program
2 Motivation
Scientists are faced with a dilemma: They need to be
able to write programs in a high-level language that allows them to express their understanding of a problem,
but at the same time they need their programs to execute very quickly, as their problems often require weeks
or even months of computation time. In the astrophysics
community, the situation had become critical: programs
would be written in a few days in a high level language,
only to have weeks or even months invested in reexpressing the problem so that it could make better use of a vectorizing subroutine library; rewriting the entire program
in assembly language; or in extreme cases, constructing
special-purpose hardware to solve the problem. ([16]) Although partial evaluation promised to provide a solution
to this dilemma for an important class of numericallyintensive programs, the parallel hardware and compilation technology required to take full advantage of the
potential of partial evaluation did not exist.
Much of the design of the Supercomputer Toolkit was
based on the observation (See [7]) that numerical applications are special in that they are for the most part
data-independent, meaning that the sequence of numerical operations that will be performed is independent
of the actual numerical values being manipulated. For
instance, matrix multiply performs the same sequence
of numerical operations regardless of the actual numerical values of the matrix elements. Partial evaluation of
1
Specically, ve time-steps of a 12th-order Stormer integration of the gravity-induced motion of a 9-body solar
system.
1
This focus on data-independent programs was carried to
an extreme, leading to a system that provided extraordinary performance on data-independent code, but which
required that code containing data-dependent branches
be left residual.
In most partial evaluation systems, the partiallyevaluated program is expressed in the same programming language as the source program, allowing code that
is left residual to intermingle with code that is partiallyevaluated. However, in our system, partially-evaluated
code is executed on a specialized numerical processor
that does not support the original source language. Each
piece of code that is not partially evaluated must be converted (either by hand or by an application-specic program generator) into the low-level assembly language of
each Toolkit processor. Thus in order to use the Supercomputer Toolkit compiler on a data-dependent program, the program must rst be divided up into dataindependent subprograms, each of which are then compiled (via partial evaluation and parallel scheduling) to
form a high-performance subroutine.
For the numerical applications the toolkit was intended to be used for, such as the integration of ordinary
dierential equations, the division of programs into dataindependent subprograms did not pose a major problem,
as the complexity inherent in these problems tends to
be isolated in one or two well-dened data-independent
subprograms. However, when people from communities
outside of the Toolkit's originally intended user base began to use the Toolkit for problems exhibiting greater
data dependence, the poor handling of data-dependent
branches posed a serious obstacle.
It is important to note that there is no technical obstacle that prevented better handling and limited partialevaluation of data-dependent branches. Indeed, our original intention was to implement a compilation process
that combined aggressive partial evaluation-based optimization of data-independent subprograms with traditional code generation techniques that would handle
the data-dependent branches. However, this integration with traditional techniques was never completed: as
soon as the portion of the compiler that handles dataindependent programs became operational, the allure
of the dramatic performance increases available motivated scientists to start using the system immediately,
using a few lines of assembly language to implement the
residual data-dependencies, and invoking the compiled
data-independent subprograms from assembly language
as subroutines. Eventually, a number of the users built
on top of the Toolkit compiler their own applicationspecic program generators that automatically created
the few lines of assembly-language instructions required
to implement the data-dependent branches of their programs.
to the original Scheme program (compiled by the
LIAR Scheme compiler) revealed speed-ups which
typically ranged from 10 to 100 times faster. In
the case of the 9-body program, partial evaluation
provided a speedup factor of 38x. This speedup
factor can be realized through execution in C on
traditional sequential machines as well as through
execution on the Supercomputer Toolkit.
2 The performance improvement provided by the
ability of each Toolkit processor to make eective
use of ne-grain parallelism to keep the oatingpoint pipeline full was measured by comparing the
sustained rate attained by each Toolkit processor
(12.9 Mops) to the sustained rate attained by the
fastest workstation available at the time2 (which
happened to make use of the same oating-point
chip set as the Supercomputer Toolkit processor)
executing hand-optimized code expressed in Fortran (2 Mops). Thus the Toolkit's processor architecture achieved approximately a 6x performance
improvement by enabling multiple ne-grained instructions to execute in parallel within the oatingpoint chip set.
3 The eectiveness of the static scheduling and grainsize adjustment parallel compilation techniques to
make use of multiple toolkit processors simultaneously was measured by comparing the execution
time of the 9-body program executing on eight
Toolkit processors in parallel to a virtually optimal uniprocessor implementation of the 9-body
program. A factor of 6.2x performance improvement was attained by making use of eight processors in parallel.
The speedups available from partial evaluation, from
the use of ne-grain parallelism within each processor,
and from multiprocessor execution are orthogonal. Thus
from the \black box" point of view of our scientic user
community, the 9-body program executed in parallel on
the Supercomputer Toolkit 1413x faster than did the traditionally compiled high-level Scheme program executed
on a high performance workstation. Of this speedup,
a factor of 38 resulted directly from partial evaluation
and could have been achieved by executing the partiallyevaluated program in C on a workstation, while a factor
of 37.2 of the speedup resulted from the ability of the
Supercomputer Toolkit hardware to make use of the parallelism exposed by partial evaluation.
4 Design Goal: Optimization of
Data-Independent Programs
The Supercomputer Toolkit system was designed based
on the observation that in the scientic applications we
were most interested in, such as the integration of ordinary dierential equations, the data-dependent portions
of a program tend to be very small, typically taking the
form of error checks or \Is it good enough yet?" style
loops, with the vast majority of the computation occuring in the data-independent portions of the program.
2
5 The Partial Evaluator
The Supercomputer Toolkit compiler performs partial
evaluation of data-independent programs expressed in
the Scheme dialect of Lisp by using the symbolic execution technique described in previously published work
by Berlin ([6]). Using this technique, the input data
An HP9000/835
2
structures for a particular problem are provided at compile time, using placeholders to represent those numerical values that will not be available until execution time.
Partial evaluation occurs by executing the program symbolically at compile time, creating and accessing datastructures as necessary, and performing numerical operations whenever possible. The partial evaluator only
leaves as residual those operations whose numerical input values will not be available until execution time. The
partially-evaluated program consists entirely of numerical operations: the execution of all loops, data-structure
references and creations, and procedure manipulations
occurs at compile time.
Our partial evaluation strategy proved quite eective
on the ordinary dierential equation style applications
we originally envisioned that the Toolkit would be used
for. As a wider scope of applications began to develop,
the most serious deciency in our system proved to be
the lack of support for leaving selected data-structure operations residual in the partial evaluation process. For
instance, although users might want an operation such as
matrix multiply to be completely unrolled, they might
still want the resulting data to be stored in a particular matrix format. Our system eliminated all datastructures, making it dicult to perform certain programming tricks that rely on the location of a piece
of data in memory, and requiring a data-rearrangement
when interfacing with subroutines that had particular
memory-storage expectations.
SEQUENCER
CONTROL STORE
16k x 168 bits
ADDRESS
GEN
ADDRESS
GEN
MEMORY
16k x 64
MEMORY
16k x 64
I/O
I/O
REGISTER FILE
32 x 64
+
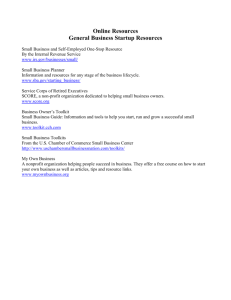
Figure 1: This is the overall architecture of a Supercomputer
Toolkit processor node, consisting of a fast oating-point chip
set, a 5-port register le, two memories, two integer alu address generators, and a sequencer.
for use by the next operation. By utilizing the parallelism exposed by partial evaluation, the Toolkit compiler was able to schedule operations during these intermediate cycles, thereby keeping the oating-point chip
set fully utilized. Indeed, on a wide variety of applications, the Supercomputer Toolkit compiler was able to
sustain oating-point unit usage rates in excess of 99%.
In theory, up to twelve Toolkit processors may be
combined to form a parallel computing system, although
the largest system ever constructed is an eight processor
system. Each Toolkit processor has its own programcounter and is capable of independent operation. Special synchronization and branch control hardware provide the program-counters of the various processors with
the ability to track one another, eectively allowing a
single program to make use of multiple processors simultaneously. The experimental results presented in this
paper were performed on an eight processor Supercomputer Toolkit, congured so that two independent interprocessor communication channels were shared by all
eight processors.
6 The Toolkit Processor Architecture
Each Supercomputer Toolkit processor is a Very Long
Instruction Word (VLIW) computer. The processor architecture is designed to make eective use of the negrain parallelism exposed by partial evaluation by keeping a pipelined high-performance oating-point chip set
fully utilized. In general, the oating-point chip set produces a 64-bit result during every cycle, and requires
two 64-bit inputs during each cycle. Constructing a processor that can move around enough data to keep the
oating-point chips busy required the inclusion within
each processor of two independent memory systems, as
illustrated in Figure 1. Each memory system has its
own dedicated integer ALU and register le for generating memory addresses, while a third integer ALU handles program-counter sequencing operations. To support
interprocessor communication, each processor has two
high-speed Input/Output ports attached directly to its
main register les. For a more detailed description of the
Supercomputer Toolkit processor architecture, see [2].
Since partial evaluation eliminated all data-structures
and higher-order procedure calls, the compiler was able
to predict the data needs of the oating-point chips at
compile time, giving it the freedom to decide which of
the two memory systems each result would be stored
in, and to begin the data movement necessary to support a particular oating-point operation many cycles
in advance of the actual start of the operation. Due
to the pipeline structure of the oating-point chip set,
it is possible to initiate an operation during each cycle,
but the result of that operation is often not available
7 Parallel Compilation Technology
We have developed parallel compilation software that automatically distributes a data-independent computation
for parallel execution on multiple processors. Dividing
up the computation at compile time is practical only because partial evaluation eliminates the uncertainty about
what numerical operations the compiled program will
perform, by evaluating conditional branch instructions
related to data-structures and strategy selection at compile time. In other words, all branches of the form \Have
we reached the end of the vector yet?" and \Have we
been through this loop 5 times yet?", are eliminated at
3
480
|
420
|
360
|
300
|
240
|
180
|
120
|
60
|
Processors
540
|
compile time, leaving for run-time execution only those
branches that actually depend on the numerical values of
the results being computed. Thus the partial evaluation
process is similar to loop unrolling, but is much more extensive, as partial evaluation also eliminates inherently
sequential procedural abstractions and data structures,
such as lists, that would otherwise act as barriers to parallel execution.
In the compiler community, a sequence of computation instructions ending in a conditional branch is known
as a basic block. The largest basic blocks produced by
traditional compilers are usually around 10-30 instructions in length, and reect the calculations expressed
within the innermost loop of a program. In contrast, the
basic blocks of a partially evaluated program are usually
several thousand instructions in length. For example, the
basic-block associated with the 9-body program mentioned earlier consisted of 2208 oating-point instructions. A limitation of the partial evaluation approach
is that for programs that manipulate large amounts of
data, the basic blocks may actually get too long to t in
memory, at which point it is necessary for the programmer to declare that certain data-independent branches,
such as outermost loops, should be left intact, limiting
the scope of partial evaluation.
Each basic block produced by partial evaluation may
be represented as a data-independent (static) data-ow
graph whose operators are all low-level numerical operations. Previous work ([6]) has shown that this graph
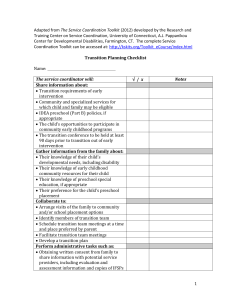
contains large amounts of low-level parallelism. For instance, the parallelism prole for the 9-body program,
illustrated in Figure 2, indicates that partial evaluation
exposed so much low-level parallelism that in theory,
parallel execution could speedup the computation by a
factor of 69x faster than a uniprocessor execution. However, achieving this theoretical maximum speedup factor
would require using 516 non-pipelined processors capable of instantaneous communication with one another.3
In practice, much of the available parallelism must
be used within each processor to keep the oatingpoint pipeline full, it does take time (latency) to communicate between processors. As the latency of interprocessor communication increases, the maximum possible speedup decreases, as some of the parallelism must
be used to keep each processor busy while awaiting the
arrival of results from neighboring processors. Bandwidth limitations on the inter-processor communication
channels further restrict how parallelism may be used by
|
0|
0
|
2
|
4
|
6
| | | | | | | | | | | | | |
8 10 12 14 16 18 20 22 24 26 28 30 32 34
Operation Level Parallelism Profile Cycles
Figure 2: Parallelism prole of the 9-body problem. This
graph represents all of the parallelism available in the problem, taking into account the varying latency of numerical
operations.
requiring that most numerical values used by a processor
actually be produced by that processor.
8 Parallel Scheduling Techniques
Previously published work by Berlin and Weise ([4]) suggested the use of critical-path based parallel scheduling
techniques to take advantage of the low-level parallelism
exposed by partial evaluation. Critical-path based techniques, which give priority to the longest computations
in a program, are very eective at overcoming latency
limitations, but do not consider bandwidth limitations
at all. In other words, a critical-path based scheduler
will seek to schedule a non-critical path operation on
any processor that happens to be available, without regard to the fact that the operands and result of that
operation may need to be transmitted between processors. This approach is only eective in situations where
a large amount of inter-processor communication bandwidth is available, making it feasible for many results to
be transmitted between processors.
Each of the Supercomputer Toolkit 's two interprocessor communication channels can accept one result
every other cycle. As a result of this communication
bandwidth limitation, on an eight processor system, only
one out of every eight results produced by a processor
can be transmitted to other processors. Thus on the
Toolkit system, roughly seven out of every eight numerical results used by a processor must be produced by
that processor. We rst attempted to generate parallel
code for the Supercomputer Toolkit using critical-path
based scheduling techniques similar to those suggested
3
We originally chose the 9-body program as an example to ease comparison with previously published work that
also studied this program, including [11], [6], and [4]. However, there are numerical discrepancies between the theoretical speedup factors published in this paper and those presented in our previously published work, due to improvements
that were made to the constant-folding phase of our compiler.
As a result of these improvements, the data-ow graph of the
9-body program being discussed in this paper has fewer operations than the data-ow graph used in [6] and [4]. All
graphs and statistics presented in this paper, including the
parallelism prole, have been updated to account for this
change.
4
by Berlin and Weise. Due to communication bandwidth
limitations, the results were dismal: On the 9-body program, a speedup factor of only 2.5x was achieved using
eight processors.
A
9 Grain-Size Adjustment
B
*
/
1
To overcome the scheduling diculties associated with
limited communication bandwidth, we developed a technique that adjusts the grain-size of the ne-grain parallelism exposed by partial evaluation to match the interprocessor communication capabilities of the architecture.
Prior to initiating critical-path based scheduling, we perform a locality analysis that groups together operations
that depend so closely on one other that it would not
be practical to place them in dierent processors. Each
group of closely interdependent operations forms a larger
grain-size instruction, which we refer to as a region.4 In
essence, grouping operations together to form a region is
a way of simplifying the scheduling process by deciding in
advance that certain opportunities for parallel execution
will be ignored due to limited communication capabilities. Critical-path based scheduling is performed and
works eectively at the region level, assigning regions to
processors, rather than assigning ne-grain instructions
to processors.
Since all operations within a region are guaranteed to
be scheduled onto the same processor, the maximum region size must be chosen to match the communication
capabilities of the target architecture. For instance, if
regions are permitted to grow too large, a single region
might encompass the entire data-ow graph, forcing the
entire computation to be performed on a single processor! Although strict limits are therefore placed on the
maximum size of a region, regions need not be of uniform size. Indeed, some regions are large, corresponding
to localized computation of intermediate results, while
other regions are quite small, corresponding to results
that are used globally throughout the computation.
We have experimented with several dierent heuristics
for grouping operations into regions. The optimal strategy for grouping instructions into regions varies with the
application and with the communication limitations of
the target architecture. However, we have found that
even a relatively simple grain-size adjustment strategy
dramatically improves the performance of the scheduling
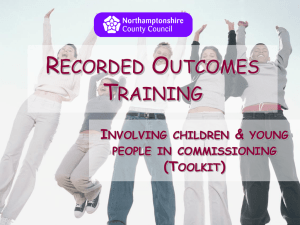
process. For instance, as illustrated in Figure 3, when a
value is used by only one instruction, the producer and
consumer of that value are grouped together to form a
region, thereby ensuring that the scheduler will not place
the producer and consumer on dierent processors in an
attempt to use spare cycles wherever they happen to
be available. Provided that the maximum region size
C
R2
5
D
-
+
1
1
R1
*
1
Figure 3: A Simple Region Forming Heuristic. A re-
gion is formed by grouping together operations that have
a simple producer/consumer relationship. This process is
invoked repeatedly, with the region growing in size as additional producers are added. The region-growing process
terminates when no suitable producers remain, or when the
maximum region size is reached. A producer is considered
suitable to be included in a region if it produces its result
solely for use by that region. (The numbers shown within
each node reect the computational latency of the operation.)
is chosen appropriately,5 grouping operations together
based on locality prevents the scheduler from making
gratuitous use of the communication channels, forcing it
to focus on scheduling options that make more eective
use of the limited communication bandwidth.
Exploiting locality by grouping operations into regions forces closely-related operations to occur on the
same processor. Although this reduces inter-processor
communication requirements, it also eliminates many
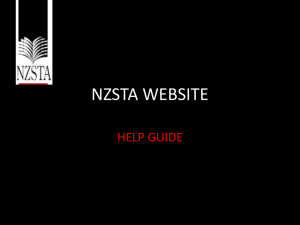
opportunities for parallel execution. Figure 4 shows the
parallelism remaining in the 9-body problem after operations have been grouped into regions. Comparison with
Figure 2 shows that increasing the grain-size eliminated
about half of the opportunities for parallel execution.
The challenge facing the parallel scheduler is to make effective use of the limited parallelism that remains, while
taking into consideration such factors as communication
latency, memory trac, pipeline delays, and allocation
of resources such as processor buses and inter-processor
communication channels.
10 Performance Measurements
The nal result of compiling the 9-body program using
the Supercomputer Toolkit compiler is shown in Figure
The name region was chosen because we think of the
grain-size adjustment technique as identifying \region" of locality within the data-ow graph. The process of grain-size
adjustment is closely related to the problem of graph multisection, although our region-nder is somewhat more particular about the properties (shape, size, and connectivity) of
each \region" sub-graph than are typical graph multisection
algorithms.
4
The region size must be chosen such that the computational latency of the operations grouped together is wellmatched to the communication bandwidth limitations of the
architecture. If the regions are made too large, communication bandwidth will be underutilized since the operations
within a region do not transmit their results.
5
5
|
40
|
20
|
|
4
|
8
Processors
2
0|
0
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 16 20 24 28 32 36 40 44 48 52 56 60 64 68
|
|
0|
0
Processors
|
60
4
|
|
80
6
|
|
100
|
|
120
8
|
140
Cycles
|
|
30
60
|
|
|
|
|
|
|
|
|
90 120 150 180 210 240 270 300 330
Cycle
Processor Utilization per Cycle
Parallelism Profile
Figure 4: Parallelism prole of the 9-body problem after op-
Figure 5: The result of scheduling the 9-body program onto
5. 6 Notice how the compiler was able to take the available parallelism shown in Figure 4 and spread it across
the processors. By utilizing eight processors in parallel, the compiler was able to achieve a speedup factor of
approximately 6.2x faster than a nearly optimal implementation of this program running on a single Toolkit
processor.
tion of the entire Solar System, incorporating a postNewtonian approximation to General Relativity and corrections for the quadrupole moment of the Earth-Moon
system. The longest previous such integration ([21]) was
for about 3 million years. The integration performed on
the Supercomputer Toolkit conrmed that the evolution
of the Solar system as a whole is chaotic with a remarkably short time scale of exponential divergence of about
4 million years. A complete analysis of the integration
results appears in [1].
A novel type of symplectic integration strategy was
developed by Wisdom and Holman for use in this application, and was expressed in the Scheme language using an abstract programming style. Partial evaluation
specialized this integration strategy for use on the solar system problem with a particular force law (gravitation) and a particular solar system conguration. The
100-million-year integration used eight Toolkit processors running in parallel. The computation was arranged
so that each processor simulated a single solar system,
but with each processor starting with slightly dierent
initial conditions. Chaos was observed by comparing
the dierences between the states that evolved from the
slightly varying initial conditions. The Toolkit compiler
was used to generate code for each processor independently. The compiled code for a single processor contains almost 10,000 Toolkit instructions for each integration step, more than 98% percent of which correspond
to oating-point operations.
This application posed somewhat of a challenge to our
partial evaluation system, as it violated our simple model
erations have been grouped together to form regions. Comparison with Figure 2 clearly shows that increasing the grainsize signicantly reduced the opportunities for parallel execution. In particular, the maximum speedup factor dropped
from 69 times faster to only 34.5 times faster than a single
processor.
eight Supercomputer Toolkit processors. Comparison with
with the region-level parallelism prole (gure 4) illustrates
how the scheduler spread the coarse-grain parallelism across
the processors. A total of 340 cycles are required to complete the computation. On average, 6.5 of the 8 processors
are utilized during each cycle.
11 Applications
A variety of scientic applications made use of the Supercomputer Toolkit system, ranging from numerical integration of the solar system to clinical genetic counseling. Some applications utilized only a single Toolkit
processor, while others ran the same program on multiple processors simultaneously, or used the automatic
parallelization features of the compiler to execute a single program on eight processors in parallel. We present
an overview of these applications, focusing on the role
played by partial evaluation, and on the advantages and
diculties encountered.
Chaos in the Solar System:
The Supercomputer Toolkit application having the most
scientic importance was a 100-million-year integra6
This gure represents a single time step of the integration, on which the compiler achieved a speedup factor of 6.5x
using eight processors. The more conservative speedup factor quoted throughout this document for the 9-body problem
refers to ve integration time steps, thereby including the
overhead of moving data around to restart the computation
after each time step.
6
of programs as consisting of data-independent inner
loops surrounded by data-dependent branches. Specically, the new integration strategy took advantage of the
elliptical nature of the planetary orbits, making extensive use of selection operations and scientic subroutines,
some of which were heavily data-dependent. Thus this
program had data-dependencies at the very core of its
innermost loops.
We chose to handle these innermost data dependencies by providing a mechanism for leaving subroutines
residual. In our hybrid system, this amounted to allowing a partially-evaluated program to include a call to a
data-dependent hand-coded routine, such as sin. By developing a small library of code that could be left \residual", that included the trigonometric functions as well
as a few selection operations such as \return the second
argument if the rst argument is greater than 0", we
were able to abstract away these innermost data dependencies, eectively burying them inside of rather simple
subroutines.
Note that an alternative approach would have been
to use techniques for extending the placeholder-based
partial evaluation strategy to allow it to generate code
that contains selection-style conditional branches, as described in [7]. We did indeed add these techniques
to our front-end partial evaluator, but have not extended the code generation back-end to handle conditional branches, primarily because demand for this functionality from our scientic users dropped o once the
subroutine library of selection operations became available.
gramming style enabled by partial evaluation permitted quad-precision oating-point operations to be substituted for double-precision operations with the simple
replacement of a few procedure denitions.
The Orrery verication experiment ran on a single
Toolkit processor, since the automatic parallelization
portion of the Toolkit compiler was not yet operational
at the time the experiment was performed. Once the
automatic parallelizer was completed, we compiled a
Stormer integration of a full 9 planet solar system, generating a program that utilized eight processors in parallel
to achieve a factor of 6.2x speedup over the single processor Toolkit program. This program, which we refer
to as an example earlier in this paper, was the rst to
take full advantage of the parallelism exposed by partial
evaluation, and to the best of our knowledge constituted
the fastest integration of the solar system ever achieved.
Circuit Simulation:
Hal Abelson, Jacob Katznelson, and Ognen Nastov
wrote several programs that utilized the toolkit to perform simulation of circuits like phase locked loops. Some
of the problems they studied utilized a runge-kutta integrator, which was well suited to the Toolkit environment, including a Voltage Controlled Oscillator and a
Phase Locked Loop. Both simulations when compiled by
the toolkit compiler were shown to run approximately 6
times faster on a toolkit processor than on the best oating point workstation available at the time, an HP835
running a Fortran version of the same program.
Partial evaluation was used to specialize the circuit
simulator and integration method for the particular circuit being simulated. When a straightforward integration strategy such as 4th-order runge-kutta was used, the
application was almost entirely data-independent, mapping very well onto the Toolkit architecture. However,
simulation of many of the circuits studied required the
integration of a sti system of dierential equations, using a complex and highly data-dependent Gear integration technique. The Gear integration technique uses a
sparse linear equation solver, which involves signicant
data-dependent control ow.
It was possible to utilize the Toolkit compiler to produce code for the data-independent portions of these
simulations, including the code that implements the dynamic equations of the circuit itself, but implementation
of the highly data-dependent portions of the GEAR integrator had to be performed by hand in assembly language. This required the assembly language programer
to have knowledge of the storage allocation strategy used
by the compiler to store results in memory, which led to a
fairly complex and not very well organized set of interactions. A much needed enhancement to our system would
be to provide a way for the programmer to request that
the compiler adhere to a particular data storage strategy,
such as maintaining a particular data representation for
a matrix, rather than the strategy used by our current
implementation which leaves the compiler free to store
data values in any place that is convenient, including
processor registers.
Interestingly, despite the use of partial evaluation, cir-
Orrery Verication Experiment:
Another astrophysics application involved verifying results that had been obtained in 1988 by G. Sussman and
J. Wisdom using the Digital Orrery to demonstrate that
the long-term motion of the planet Pluto, and by implication the dynamics of the Solar System, is chaotic ([15]).
The Digital Orrery was a special-purpose parallel computer designed explicitly to integrate the solar system.
Computations run on the Orrery were parallelized and
programmed in microcode by hand, with one processor
devoted to each planet. In contrast, the program that
executed on the Supercomputer Toolkit was written in
Scheme, and automatically compiled using the Toolkit's
partial evaluation-based compiler.
The Orrery integration required integrating the positions of the outer planets for a simulated time of 845
million years (note that this is only 6 planets, rather than
the 9 in the whole solar system), which required running
the Orrery continuously for more than three months.
The same integrations utilizing a 6-body stormer integrator were performed on a single toolkit processor, showing
that each toolkit processor coupled with the compiled
partially evaluated code was about 3 times faster than
the entire multiple processor Digital Orrery.
This program mapped nearly perfectly onto the
Toolkit system. The only data-dependent branches were
located at the outermost \is it done yet?" loop. With
the exception of this single instruction end-test, the entire program was partially evaluated. The abstract pro7
cuit simulations involving the Gear integrator ran slowly
compared to other circuit simulators. Later investigation
revealed that this was primarily because this simulator,
and the Gear integrator in particular, did not employ
some implementation tricks that are used by other circuit simulators such as SPICE. However, another factor
limiting the performance of this application is that the
interface between the compiled code implementing the
circuit dynamics and the hand-written code implementing the Gear integrator involved a lot of copying of data.
A better interface that allows the compiler to take the
ultimate destination of a value into account would provide noticeable performance improvement.
I/O connection to the Toolkit that would have solved
this problem was designed, but was never constructed.
Clinical Genetic Counseling:
Finally, a program to calculate the probabalistic relationships over a Bayesian Network like a pedigree was
written by Minghsun Liu. This program was designed
to be used to answer the \What if?" types of questions that arise in genetic counseling when determining
the probability that a potential child may have a particular defect. The computation time grows exponentially with the number of \unknown" nodes in the probability tree. However, if certain assumptions are made
about the relative independence of some of these \unknown" nodes, partial evaluation can play an important
role, signicantly reducing the size of the computation,
as described in more detail in [17] and [18]. For any particular program invocation this program performed well.
However, for successive invocations, execution speed was
hampered by lack of the ability to perform incremental
partial evaluation, so that the structure of the network
could be locally changed without triggering the need to
recompile entire probability network.
Computation of Lyapunov Exponents:
The toolkit was used in an experiment by Shyam Parekh
to compute the Lyapunov exponents of non-linear systems. Lyapunov exponents characterize the divergence
of the distance between two trajectories in a dynamical
system and can serve as an indicator of chaotic behavior. The Supercomputer Toolkit system was used to do
parameter space scans of chaotic circuits such as the double scroll circuit. These theoretical scans were compared
against actual scans performed using a real circuit. The
results and implementation details of these experiments
can be found in [19].
12 Conclusions and suggestions for
future work
An Integration System for Ordinary
Dierential Equations:
To the best of our knowledge, the Supercomputer
Toolkit system is the rst to make eective use of the
vast amount of low-level parallelism exposed by partial
evaluation. Partial evaluation proved eective in virtually all of the applications encountered during the Supercomputer Toolkit project. In some cases, the Toolkit
and its compiler created new opportunities to produce
important results in science. In other cases, mostly due
to shortcomings in the implementation of the compilation system, the applications did not map well onto the
Toolkit.
The range of applications that could be run on the Supercomputer Toolkit would have been greatly expanded
had the Toolkit's compiler provided a way of leaving
selected data-dependent branches and data-structures
residual. In this way, heavily data-dependent applications such as the Gear integrator, that require the existence of data-structures in a particular format (sparse
matrices) on the Toolkit itself could have been written
without the need for hand-coding in Toolkit assembly
language.
The symbolic execution technique for performing partial evaluation of data-independent programs was simple
to implement and worked well. We have already developed some ways (see [7]) to extend this technique to handle certain types of data-dependent branches, and can
envision extending it to permit certain data-structures
to be left residual.
With recent developments in partial evaluation
technology, the Toolkit's partial evaluator for dataindependent programs may appear somewhat primitive.
However, a key design goal of our system was to be able
to take existing highly complex and abstract Scheme
programs from scientists, unaltered, and run them on
Sarah Ferguson built a software system on top of the
toolkit compiler that takes an equation as input, and automatically generates a Scheme program to integrate it.
Sarah's system uses the partial-evaluation features of the
Toolkit compiler to specialize the integrator for the particular equation being integrated, and to generate code
for the main body of the integration. Her system also
generates a few lines of Toolkit assembly language that
implement a data-dependent branch that adjusts the integration step size based on how much integration error
is being encountered. This system performed quite well,
with the data-dependent branches playing a minor role
that did not signicantly aect system performance.
Elizabeth Bradley used Sarah Ferguson's integration
system to perform dynamical simulations of chaotic systems as part of her research on control of chaotic systems
([20]), including the Lorenz system and the double pendulum system. These systems were a perfect match for
both our partial evaluation technology and the Toolkit
architecture, and executed extremely quickly. Unfortunately, the Toolkit was designed to support applications that run for a long time before producing a result,
whereas Elizabeth Bradley needed to capture the intermediate results that were being produced rapidly. Although the computationally expensive integration routines mapped very well onto the Toolkit architecture,
the symbolic routines that analyzed the numerical results could not be executed on the numerically-oriented
Toolkit system and had to be run on the workstation
host. The program thus became I/O limited, with the
Toolkit computer producing data far more quickly than
it could be transferred to the workstation host. A faster
8
the Supercomputer Toolkit. These programs often included global state, side-eects, manipulation of complex data structures such as streams, and the storing
of higher-order procedures within data-structures. Such
program features pose serious challenges to partial evaluation technology. It is remarkable that a partial evaluation system such as ours, capable of handling only dataindependent programs, could have so large an impact on
science.
As hardware technology evolves, the use of partial
evaluation to expose parallelism will play an increasingly important role. As processor clock speeds increase,
pipeline lengths will grow longer, and will require signicant amounts of parallelism to keep them full. But more
importantly, as it becomes possible to build multiple processors on a single chip, the vast amount of parallelism
exposed by partial evaluation will play a key role in computation, aecting programming language and library
design as well as the compilation process itself.
[6]
[7]
[8]
[9]
13 Acknowledgements
The Supercomputer Toolkit project was the result of a
joint eort between M.I.T. and Hewlett-Packard. The
following people were all involved in the eort to create
and utilize this system: Hal Abelson, Andrew A. Berlin,
Joel Birnbaum, Jacob Katzenelson, William H. McAllister, Guillermo J. Rozas, Gerald Jay Sussman, Jack Wisdom, Dan Zuras, Rajeev J. Surati, Karl Hassur, Dick
Vlach, Albert Chun, David Fotland, Marlin Jones, John
Shelton, Sam Cox, Robert Grimes, Bruce Weyler, Elizabeth Bradley, Shyam Parekh, Sarah Ferguson, Ognen
Nastov, Mingsun Liu, Peter Szolovitz, Carl Heinzl, Darlene Harrell, and Rosemary Kingsley.
[10]
[11]
References
[12]
[1] G. J. Sussman and J. Wisdom, \Chaotic
Evolution of the Solar System," Science,
Volume 257, pp. 256-262, July 1992.
[2] H. Abelson, A. Berlin, J. Katzenelson, W.
McAllister, G. Rozas, G. Sussman, \The
Supercomputer Toolkit and its Applications," MIT Articial Intelligence Laboratory Memo 1249, Cambridge, Massachusetts.
[3] R. Surati and A. Berlin, \Exploiting the
Parallelism Exposed by Partial Evaluation", In Proc. of the IFIP WG10.3 International Conference on Parallel Architectures and Compilation Techniques, Elsevier Science, 1994 also available as MIT
Articial Intelligence Laboratory Memo
no. 1414, April 1993.
[4] A. Berlin and D. Weise, \Compiling Scientic Code using Partial Evaluation," IEEE
Computer December 1990.
[5] R. Surati, \A Parallelizing Compiler Based
on Partial Evaluation", S.B. Thesis, Electrical Engineering and Computer Science
Department, Massachusetts Institute of
[13]
[14]
[15]
[16]
[17]
9
Technology, May 1992. Also available as
TR-1377, MIT Articial Intelligence Laboratory, July, 1993.
A. Berlin, \Partial Evaluation Applied
to Numerical Computation," Proc. 1990
ACM Conference on Lisp and Functional
Programming, Nice France, June 1990.
A. Berlin, \A compilation strategy for numerical programs based on partial evaluation," MIT Articial Intelligence Laboratory Technical Report TR-1144, Cambridge, MA., July 1989.
E. Ruf and D. Weise, \Opportunities for
Online Partial Evaluation", Technical Report CSL-TR-92-516, Computer Systems
Laboratory, Stanford University, Stanford,
CA. 1992.
E. Ruf and D. Weise, \Avoiding Redundant Specialization During Partial Evaluation," In Proceedings of the 1991 ACM
SIGPLAN Symposium on Partial Evaluationand Semantics-Based Program Manipulation, New Haven, CN. June 1991.
L. Nagel, SPICE2: A Computer Program to Simulate Semiconductor Circuits,
Electronics Research Laboratory Report
No. ERL-M520, University of California,
Berkeley, May 1975.
J. Miller, \Multischeme: A Parallel Processing System Based on MIT Scheme".
MIT Laboratory For Computer Science
technical report no. TR-402. September,
1987.
M. Katz and D. Weise, \Towards a
New Perspective on Partial Evaluation,"
In Proceedings of the 1992 ACM SIGPLAN Workshop on Partial Evaluation
and Semantics-Directed Program Manipulation, San Francisco, June 1992.
J. Ellis, Bulldog: A Compiler for VLIW
Architectures, MIT Press, Cambridge,
MA, 1986.
J.A. Fisher, \Trace scheduling: A Technique for Global Microcode Compaction."
IEEE Transactions on Computers, Number 7, pp.478-490. 1981.
G.J. Sussman and J. Wisdom, \Numerical evidence that the motion of Pluto is
chaotic," Science, (to appear). Also available as MIT Articial Intelligence Laboratory Memo no. 1039, April 1988.
J. Applegate, M. Douglas, Y. Gursel, P.
Hunter, C. Seitz, G.J. Sussman, \A Digital Orrery," IEEE Trans. on Computers,
Sept. 1985.
P. Szolovits, \Compilation for Fast Calculation Over Pedigrees," Cytogenet Cell
Genet Vol. 59, pgs 136 - 138, 1992
[18] P. Szolovits and S. Pauker, \Pedigree
Analysis for Genetic Counseling," Medinfo
92
[19] S. Parekh, \Parameter Space Scans for
Chaotic Circuits" S.B. Thesis, MIT 1992.
[20] E. Bradley, \Taming Chaotic Circuits"
Ph.D. Thesis, MIT 1992.
[21] T. Quinn, S. Tremaine, and M. Duncan
\A Three Million Year Integration of the
Earth's Orbit," Astron. J., vol. 101, no. 6,
June 1991, pp. 2287{2305.
[22] C. Heinzl, \Functional Diagnostics for the
Supercomputer Toolkit MPCU Module",
S.B. Thesis, MIT, 1990.
10
 0
0
advertisement
Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users