Drift perturbation’s influence on traveling wave speed in KPP-Fisher system
advertisement

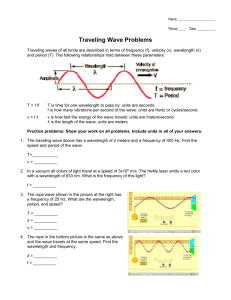
DOI: 10.1515/auom-2016-0010 An. Şt. Univ. Ovidius Constanţa Vol. 24(1),2016, 189–200 Drift perturbation’s influence on traveling wave speed in KPP-Fisher system Fathi DKHIL and Bechir MANNOUBI Abstract This paper dressed the drift perturbation effects on the traveling wave speed in a reaction-diffusion system. We prove the existence of a traveling front solution of a KPP-Fisher equation and we show an asymptotic expansion of her speed. Finally, we discuss according all parameters of our system regions of the plane in which the traveling wave speed increases or decreases as a function of a small parameter ε. 1 Introduction Front propagation is a phenomenon that has many scientific applications ; such as : the sprawl of epidemics and diseases, biological invasions and collective behavior, ecology, population dynamics, reaction kinetics, the flow in porous materials, etc. This phenomenon is generally modeled by a reaction-diffusion equation of the following form Ut = ∇.(A∇U ) + f (U ) U (0, x) = U0 (x) where the diffusivity A is a positive definite matrix and the reaction term f is a C 2 nonlinear function. Key Words: Reaction-diffusion equations, heterogeneous media, traveling wave speed, drift perturbation, KPP-Fisher equations. 2010 Mathematics Subject Classification: Primary 35B20, 35B27, 35B50; Secondary 35C20, 35K55, 35K57, 41A60. Received: 17.02.2014 Revised: 3.05.2014 Accepted: 12.05.2014. 189 DRIFT PERTURBATION’S INFLUENCE ON TRAVELING WAVE SPEED IN KPP-FISHER SYSTEM 190 Understanding the mechanism of the settings of perturbation on the diffusion and (or) reaction influences the traveling fronts like configuring their location, profile, and their speed is one of the most fundamental issues. In fact, variational principles for the speed of front propagation for KPP-type nonlinearities, respectively Fisher’s population genetic model as well as various other implications of the qualitative behavior of propagating waves, were given by Hadeler and Rothe in [7] and Gärtner and Freidlin in [6]. Paper [2] is used to handle the speed of traveling fronts of reactions-diffusion equations of bistable or combustion type with rapidly oscillating diffusion and drift coefficients. In the monostable case (KPP-Fisher type), the variation of the traveling wave speed was treated in [3] for nonlocally perturbed reaction-diffusion equations. Compare the survey papers ([14],[16],[15]) in order to have an excellent reference on propagation phenomenas mathematical results especially on the existence and stability of traveling waves, and other references that has not already been cited here. In this paper we consider a particular kind of reaction-diffusion system with drift perturbation. The type of system we are dealing with is the following ut = α∆u + γu(1 − u − v) (1) vt = β∆v + δb∇v + ηv(1 − u − v) with: x = (x1 , x2 , ...., xn ) ∈ D = R × Ω ⊂ Rn , t > 0, b = b(x2 ...xn ), β = β(ε) −→ α, η = η(ε) −→ γ and δ = δ(ε) −→ 0 as ε −→ 0. The cross section of the cylinder Ω ⊂ Rn−1 is bounded with C 1,λ boundary. For simplicity, we will consider here traveling waves in direction e1 = (1, 0, ..., 0). A very important question is how to study the variation of the traveling wave speed in discussing the influence of drift perturbation and all parameters α, γ, β, δ, η of system (1). Existence of unique monotone and stable traveling waves were shown in [5], [9], [10] and [13] for monotonic systems. A variational characterization given in [12] allows to prove an asymptotic expansion for the traveling wave speed solution of system (1). The paper is organized as follows. In section 2, we rescale system (1) to obtain a monotone system and we show the existence of unique monotone and stable traveling wave up to translation and we give a variational characterization of the wave speed. In section 3, we prove that the traveling wave has an asymptotic expansion. Finally in section 4, we determine regions of the plane in which the traveling wave speed solution of system (1) increases or decreases as a function of ε. DRIFT PERTURBATION’S INFLUENCE ON TRAVELING WAVE SPEED IN KPP-FISHER SYSTEM 2 191 The variational characterization We rescale the system (1). So, with no loss of generality, we can suppose that α = γ = 1 and our system becomes ut = ∆u + u(1 − u − v) (2) vt = β∆v + δb∇v + ηv(1 − u − v) with b = b(x2 ...xn ), β = β(ε) −→ 1, η = η(ε) −→ 1 and δ = δ(ε) −→ 0 as ε −→ 0. We pose w = 1 − u. Thereby system (2) becomes wt = ∆w − (1 − w)(w − v) (3) vt = β∆v + δb∇v + ηv(w − v). We can easily see that system (3) is monotone. Therefore there exists a unique monotone traveling wave (cε , wε , vε ) in direction e1 solution of (3) connecting two zeros of its nonlinearities; this wave is stable with respect to some subset Is of initial data. For more detail, see for example [5], [9], [10] and [13]. The traveling wave solution (cε , wε , vε ) of system (3) will satisfy the following boundary conditions wε , vε (−∞) = 1, 0 wε , vε (+∞) = 12 , 21 . and Let (c0 , w0 , v0 ) be the traveling wave solution of the system (3) when ε = 0 (i.e. β = 1, η = 1 and δ = 0). Let W0 = 1 + v0 − w0 = u0 + v0 , then W0 is a traveling front solution of the following KPP-Fisher equation c0 W00 = W000 + W0 (1 − W0 ) (4) W0 (−∞) = 0, W0 (+∞) = 1 with W0 (t, x) = W0 (x + c0 te1 ) and W00 represent the derivative of W0 with respect to the first component x1 of x. Let Wε = 1 + vε − wε = vε + uε , (5) then Wε is a traveling wave solution of the following equation cε Wε0 = ∆Wε + Wε (1 − Wε ) + (β − 1)∆vε + δb∇vε + (η − 1)vε (1 − Wε ) Wε (−∞) = 0, Wε (+∞) = 1. (6) DRIFT PERTURBATION’S INFLUENCE ON TRAVELING WAVE SPEED IN KPP-FISHER SYSTEM 192 Let ( K= ) y ∈ C 1 (R, C 2 (D))∂t y(t, x) > 0, 0 < y(t, x) < 1, y(0, .) ∈ Is , y(−∞) = 0, y(+∞) = 1 be the sets of admissible comparison functions. For y ∈ K define ψ(y) = ∆y + y(1 − y) + (β − 1)∆vε + δb∇vε + (η − 1)vε (1 − y) . ∂t y In [5] a variational characterization of the wave speed was given for more general situations. Here we will state a specific version of the result as a lemma. LEMMA 2.1. [5] Suppose that there exists a unique stable traveling wave for problem (6) then the traveling wave speed cε is given by sup inf y∈K (t,x)∈(R×D) ψ(y(t, x)) = cε = inf sup y∈K (t,x)∈(R×D) ψ(y(t, x)). (7) The proof of this minimax characterization of the wave speed cε is based on the maximum principle and relates technically to results given by Vol’pert et al in [12] for monotone systems of ODE’s. 3 Asymptotic expansion THEOREM 3.1. The traveling wave (cε , wε , vε ) solution of the system (3) has the following expansion: cε vε wε Proof. We note β 0 = = c0 + εc1 + o(ε) = v0 + εv1 + o(ε) = w0 + εw1 + o(ε). (8) dη dδ dβ , η0 = and δ 0 = then equation dε |ε=0 dε |ε=0 dε |ε=0 (6) becomes Wεt = ∆Wε + Wε (1 − Wε ) + ε [β 0 ∆vε + δ 0 b∇vε + η 0 vε (1 − Wε )] + o(ε). Since Wε and vε are regular and bounded functions, then the comparison principle implies that Wε = W0 + εW1 + o(ε). DRIFT PERTURBATION’S INFLUENCE ON TRAVELING WAVE SPEED IN KPP-FISHER SYSTEM Furthermore, we have uεt = ∆uε + uε (1 − uε − vε ) u0t = ∆u0 + u0 (1 − u0 − v0 ) 193 We substract these two equations to get (uε − u0 )t − ∆(uε − u0 ) − (uε − u0 )(1 − u0 − v0 ) = u(W0 − Wε ). Using the comparison principle, we obtain uε = u0 + εu1 + o(ε). Therefore, we deduce from (5) that wε = w0 + εw1 + o(ε) and vε = v0 + εv1 + o(ε) which justify our expansion for vε and wε . To show the asymptotic expansion of cε , we consider the test function: y(x) = W0 + εy1 (x), where y1 will be determined below. An easy computation gives that ψ(y) = ∆y + y(1 − y) + (β − 1)∆vε + δb∇vε + (η − 1)vε (1 − y) ∂t y = c0 W00 + ε [y100 + (1 − 2W0 )y1 + η 0 v0 (1 − W0 ) + β 0 v000 + δ 0 bv00 ] + o(ε) W00 + εy10 ε [y 00 − c0 y10 + (1 − 2W0 )y1 + η 0 v0 (1 − W0 ) + β 0 v000 + δ 0 bv00 ] W00 1 +o(ε). = c0 + We choose y1 such that the coefficient of ε in ψ(y) is constant. Thus y1 solves the following equation 00 y1 − c0 y10 + (1 − 2W0 )y1 = −c1 W00 − η 0 v0 (1 − W0 ) − β 0 v000 − δ 0 bv00 y1 (±∞) = 0. DRIFT PERTURBATION’S INFLUENCE ON TRAVELING WAVE SPEED IN KPP-FISHER SYSTEM 194 Near ±∞ all derivatives of W0 have the same exponential decay rate as W00 . Therefore with our choice of y we have ∂t y > 0 for small ε. Thus y is an admissible function for the minimax characterization (7) and we have cε = c0 + εc1 + o(ε). This ends the proof of Theorem 3.1. 4 Sign of c1 In this section, we discuss according to derivative perturbations parameters how c1 may change sign. PROPOSITION 4.1. Let (cε , wε , vε ) be the traveling wave solution of system (3), then the variation of cε is as follows. p I I c0 + c20 − 4 0 0 0 0 c0 β 0 + δ 0 b • If c0 β + δ b ≤ 0 and η − β ≤ − 2 then cε decreases as a function of ε. • If 0 c0 β + δ 0 I b≥0 and 0 0 η −β ≥− c0 + p c20 − 4 2 c0 β 0 + δ 0 I b then cε increases as a function of ε. Proof. We note w0 and v 0 the derivatives of w and v with respect to the first variable then we have cε wε0 = ∆wε − (1 − wε )(wε − vε ) cε vε0 = β∆vε + δbvε0 + ηvε (wε − vε ) this can be writen as (c0 + εc1 )(w0 + εw1 )0 = ∆(w0 + εw1 ) − (1 − w0 − εw1 )(w0 + εw1 − v0 −εv1 ) + o(ε) (c0 + εc1 )(v0 + εv1 )0 = β∆(v0 + εv1 ) + δb(v0 + εv1 )0 +η(v0 + εv1 )(w0 + εw1 − v0 − εv1 ) + o(ε). DRIFT PERTURBATION’S INFLUENCE ON TRAVELING WAVE SPEED IN KPP-FISHER SYSTEM 195 Since (c0 , w0 , v0 ) is a solution of the system (3) when ε = 0 then we have c1 w00 + c0 w10 = ∆w1 − (1 − w0 )(w1 − v1 ) + w1 (w0 − v0 ) c1 v00 + c0 v10 = β 0 ∆v0 + ∆v1 + η 0 v0 (w0 − v0 ) + δ 0 bv00 + v0 (w1 − v1 ) +v1 (w0 − v0 ) which implies that 0 0 ∆w1 − c0 w1 − (1 − w0 )(w1 − v1 ) + w1 (w0 − v0 ) = c1 w0 ∆v1 − c0 v10 + v0 (w1 − v1 ) + v1 (w0 − v0 ) = c1 v00 − β 0 ∆v0 − η 0 v0 (w0 − v0 ) −δ 0 bv00 . We substract these two equations to obtain ∆(v1 − w1 ) − c0 (v1 − w1 )0 − (v1 − w1 )(1 + 2(v0 − w0 )) = c1 (v0 − w0 )0 − β 0 ∆v0 − η 0 v0 (w0 − v0 ) − δ 0 bv00 . We pose φ = v1 − w1 then this equation is equivalent to ∆φ − c0 φ0 − φ(1 − 2W0 ) = c1 W00 − β 0 ∆v0 − η 0 v0 (w0 − v0 ) − δ 0 bv00 . (9) Using that W0 is a solution of (4) and the Fredholm alternative, the solvability condition of the equation (9) can be writen as R R R 2 c1 R×Ω W00 e−c0 ξ = β 0 R×Ω ∆v0 W00 e−c0 ξ dx + η 0 R×Ω v0 (1 − W0 )W00 e−c0 ξ +δ 0 R R×Ω bv00 W00 e−c0 ξ . Since v0 satisfies ∆v0 = c0 v00 − v0 (1 − W0 ) and using the fuct that v0 and W0 are independent on (x2 ..xn ) ∈ Ω then the solvability condition is equivalent to R R R 2 c1 R W00 e−c0 ξ = c0 β 0 R v00 W00 e−c0 ξ + (η 0 − β 0 ) R v0 (1 − W0 )W00 e−c0 ξ +δ 0 H R 0 0 −c ξ b R v0 W 0 e 0 . After an integration by part we obtain that Z Z I 2 c1 W00 e−c0 ξ = (c0 β 0 + δ 0 b)W0 + (η 0 − β 0 )W00 v0 (1 − W0 )e−c0 ξ . R R We know that v0 (1 − W0 ) > 0, so that if c0 β 0 + δ 0 I b W0 + (η 0 − β 0 )W00 does not change sign then we can deduce the sign of c1 . Here we have three cases. DRIFT PERTURBATION’S INFLUENCE ON TRAVELING WAVE SPEED IN KPP-FISHER SYSTEM First case: c0 β 0 + δ 0 I 196 b and (η 0 − β 0 ) have the same sign then it is the sign of c1 . Second case: one of 0 c0 β + δ 0 I b and (η 0 − β 0 ) is zero then the sign of c1 is the sign of the non zero term. I 0 0 Third case: c0 β + δ b and (η 0 −β 0 ) have an opposite sign. In this case we need a good estimate on W00 . Equation (4) is equivalent to W000 − (c0 − a)W00 = aW00 − W0 (1 − W0 ) ∀a ∈ R. Since 0 < W0 < 1 then we have 1 W000 − (c0 − a)W00 > a(W00 − W0 ) ∀a 6= 0. a We choose a such that c0 − a = (see [1] and [11]). We note 1 which is possible since we have c20 ≥ 4, a c0 ± a± = (10) p c20 − 4 2 > 0. 1 After multiplication by e− a ξ and integrating the inequality (10) on (ξ, ∞) for any ξ ∈ R we obtain that W00 < aW0 with a = a− = c0 − p c20 − 4 . 2 We discuss two subcases 0 0 0 0 I 1. η − β > 0 and c0 β + δ b < 0. We have that I I 0 0 0 0 0 0 0 0 0 c0 β + δ b W0 + (η − β )W0 < c0 β + δ b + a− (η − β ) W0 < c0 0 (η + β 0 ) + δ 0 2 I b− η0 − β 0 2 q c20 − 4 W0 . DRIFT PERTURBATION’S INFLUENCE ON TRAVELING WAVE SPEED IN KPP-FISHER SYSTEM 197 I c0 0 (η + β 0 ) + δ 0 b < 0 then c1 < 0. 2 If not, we have I c0 0 (η + β 0 ) + δ 0 b > 0, 2 therefore an easy computation gives that I q η0 − β 0 c0 0 0 0 b− (η + β ) + δ c20 − 4 ≤ 0, 2 2 So that if if and only if p I −c0 + c20 − 4 c0 β 0 + δ 0 b ≤ η 0 − β 0 2 and η0 − β 0 ≤ − c0 + p I c20 − 4 0 0 c0 β + δ b . 2 Hence, in this subcase we have c1 < 0 and then cε decreases as a function of ε, for ε small enough. I 2. η 0 − β 0 < 0 and c0 β 0 + δ 0 b > 0. We have that I I 0 0 0 0 0 0 0 0 0 c0 β + δ b W0 + (η − β ) W0 > c0 β + δ b + a− (η − β ) W0 I q η0 − β 0 c0 0 (η + β 0 ) + δ 0 b − c20 − 4 W0 . 2 2 I c0 0 (η + β 0 ) + δ 0 b > 0 then c1 > 0. So that if 2 If not, we have I c0 0 (η + β 0 ) + δ 0 b < 0, 2 therefore an easy computation gives that I q c0 0 η0 − β 0 0 0 (η + β ) + δ b− c20 − 4 ≥ 0, 2 2 > if and only if − c0 + p I c20 − 4 0 0 c0 β + δ b ≤ η0 − β 0 2 DRIFT PERTURBATION’S INFLUENCE ON TRAVELING WAVE SPEED IN KPP-FISHER SYSTEM and 0 0 η −β ≤ −c0 + 198 p I c20 − 4 0 0 c0 β + δ b . 2 Hence, in this subcase we have c1 > 0 and then cε increases as a function of ε, for ε small enough. This ends the proof of proposition 4.1. Return now to the full system (1). A simple scaling argument allow to conclude the result in a general way. We note c∗ε the traveling wave speed solution of (1). Then we have the following THEOREM 4.2. Let (c∗ε , u∗ε , vε∗ ) be the traveling wave solution of system (1) cε and has the following variations. for ε small enough. Then c∗ε = α p I I c0 + c20 − 4αγ c0 0 c0 0 0 0 0 • If β +δ b ≤ 0 and αη −γβ ≤ − β + δ0 b α 2 α then c∗ε decreases as a function of ε. • If c0 0 0 β +δ α I b≥0 and αη 0 −γβ 0 ≥ − c0 + p I c20 − 4αγ c0 0 β + δ0 b 2 α then c∗ε increases as a function of ε. Where cε is the traveling wave speed solution of (3). Figure 1 presents the different regions of the plane I c0 X = β 0 + δ 0 b, Y = αη 0 − γβ 0 α in which c∗ε increases or decreases as a function of ε. REMARK 4.3. In the regions ! p c0 + c20 − 4αγ X > 0, Y < − X and 2 X < 0, Y > − c0 + ! p c20 − 4αγ X 2 of Figure 1, the determination of the sign of c1 rest an open problem. DRIFT PERTURBATION’S INFLUENCE ON TRAVELING WAVE SPEED IN KPP-FISHER SYSTEM 199 Figure 1: c∗ε variation. Acknowledgment The authors are very grateful to Hatem Zaag for his helpful comments. References [1] D.G. Anderson, H.F. Weinberg, “multidimensional nonlinear diffusions arising in population genetics,” Adv.Math.30:(7978), 33–76. [2] F. Dkhil, A. Stevens, “Traveling wave speeds in rapidly oscillating media,” Discrete and continuous dynamical system 25, no.1 (2009), 89–108. [3] F. Dkhil, A. Stevens, “Traveling wave speeds of nonlocally perturbed reactiondiffusion equations,”Asymptotic Analysis 46, (2006), 81–91. [4] S. Heinze, “Wave solutions to reaction-diffusion systems in perfored domains,” Z. Anal. Anwendungen, 20, no.3, (2001), 661–676. [5] S. Heinze, G. Papanicolaou, A. Stevens, “Variational principle for propagation speeds in inhomogeneous media,” SIAM J. Appl. Math. vol. 62, no.1, (2001), 129–148. DRIFT PERTURBATION’S INFLUENCE ON TRAVELING WAVE SPEED IN KPP-FISHER SYSTEM 200 [6] J. Gärtner, M.I. Freidlin, “On the propagation of concentration waves in periodic and random media,” Soviet. Math. Dokl., 20, (1979), 1282–1286. [7] K.P. Hadeler, F. Rothe, “Traveling fronts in nonlinear diffusion equations,” J. Math. Biol. 2, (1975), 251–263. [8] F. Hamel, “Folmules min-max pour les vitesse d’ondes progressive multidimensionelles,” Ann. Fac. Sci. Toulouse Math. (6), 8, (1999), 259–280. [9] X. Hou, “On the minimal speed and asymptotics of the wave solutions for the lotka volterra system,” Analysis of PDEs (math.AP); Dynamical Systems (math.DS) (2010). [10] X. Hou, W. Feng, “Traveling waves and their Stability for a Public Goods Game Model,” Analysis of PDEs (math.AP) (2009). [11] A.N. Kolmogorov, I.G. Petrovsky, N.S. Pisknnov “Etude de l’quation de la diffusion avec croissance de la quantit de matire et son application un problme biologique,” Bulletin Universit d’Etat Moskou (Bjul.Moskourskogo Gos.Univ), (1937), 1–26. [12] A.I. Vol’pert, V. Vol’pert, V.A. Vol’pert, “Traveling wave solutions of parabolic systems,” Translations of Mathematical Monographs, 140, Providence, RI: American Mathematical Society, (1994). [13] A. W Leung, X. Hou, W. Feng, “Traveling Wave Solutions for LotkaVolterra System Re-Visited,” Analysis of PDEs (math.AP); Spectral Theory (math.SP) (2009). [14] J. Xin, “Front propagation in heterogeneous media.” SIAM Rev., 42, (2000), 161–230. [15] J. Xin, “Existence of planar flame fronts in convective-diffusive periodic media,” Arch. Ration. Mech. Anal., 121, (1992), 205–233. [16] J. Xin, “Existence and stability of traveling waves in periodic media governed by a bistable nonlinearity,” J. Dynam. Differential Equations, 3, (1991), 541–573. Fathi DKHIL, Département de Mathématiques, Institut Supérieur d’Informatique, Université Tunis El-Manar, 2 rue Abou Raihan Bayrouni, 2080 Ariana, Tunisia. Email: fathi.dkhil@gmail.com Bechir MANNOUBI Département de Mathématiques, Institut Supérieur d’Informatique, Université Tunis El-Manar, 2 rue Abou Raihan Bayrouni, 2080 Ariana, Tunisia. Email: bechir ca@live.com