Research Article Stability and Permanence of a Pest Management Model with
advertisement

Hindawi Publishing Corporation
Abstract and Applied Analysis
Volume 2013, Article ID 832701, 18 pages
http://dx.doi.org/10.1155/2013/832701
Research Article
Stability and Permanence of a Pest Management Model with
Impulsive Releasing and Harvesting
Jiangtao Yang and Zhichun Yang
Department of Mathematics, Chongqing Normal University, Chongqing 400047, China
Correspondence should be addressed to Zhichun Yang; zhichy@yahoo.com.cn
Received 16 January 2013; Accepted 27 February 2013
Academic Editor: Chuangxia Huang
Copyright © 2013 J. Yang and Z. Yang. This is an open access article distributed under the Creative Commons Attribution License,
which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
We formulate a pest management model with periodically releasing infective pests, immature and mature natural enemies, and
harvesting pests and crops at two different fixed moments. Sufficient conditions ensuring the locally and globally asymptotical
stability of the susceptible pest-eradication period solution are found by means of Floquet theory, small amplitude perturbation
techniques, and multicomparison results. Furthermore, the permanence of system is also derived. By numerical analysis, we also
show that impulsive releasing and harvesting at two different fixed moments can bring obvious effects on the dynamics of system,
which also corroborates our theoretical results.
1. Introduction
As is known to all, pest outbreaks often cause serious ecological and economic problems. Therefore, how to effectively
control insects and other arthropods has become an increasingly complex issue. Usually, chemical pesticides were taken
as a relatively simple way to solve the pest-related problems,
and some mathematical models on pest management with
toxin (pesticide) input were studied in [1–4]. However, the
overuse of chemical pesticides may create new ecological and
sociological harm such as pesticide pollution and pesticideresistant pest varieties and inflicts harmful effects on humans
and so forth. Therefore, nonchemical use instead for pest
control has become a hot topic in order to reduce pest density
to tolerable levels and minimize the damage caused. For
instance, biological control methods by periodically releasing
infective pests or their natural enemies are often taken due to
their advantage in the aspects of self-sustainable mechanism,
lower environmental impact, and cost effectiveness.
Recently, some biocontrol models on pest management
described by impulsive differential equation were proposed
and the dynamics such as stability, permanence, periodicity,
and bifurcation are deeply investigated (see also, e.g., [2–12]).
In [5], an impulsive system to model the process of periodic
releasing natural enemies and harvesting pest at different
fixed time for pest control is considered, and the sufficient
conditions on the existence and global stability of the periodic
solution are derived for the given model. Georgescu et al.
[6, 7] construct an integrated pest management model which
relies on the simultaneous periodic release of infective pest
individuals and of natural predators with age structure and
obtain some sufficient conditions on the local and global stability, permanence, and bifurcation of the systems. However,
most of the existing models on pest management scarcely take
into account the factor on the relation between pest and its
food (e.g., crop). In fact, farmers may harvest crops several
times in process of its growth, which should cause a great
impact on the density of the pest.
Motived by the above discussion, we construct a model
of pest control by periodically releasing infective pests,
immature and mature natural enemies, and harvesting pests
and crops. To account for the discontinuity of release and
harvest at different fixed moments, our model is based on
impulsive differential equations. We analyze the dynamical
behavior of the system by using the theory of impulsive
differential equation introduced in [13–15].
The rest of this paper is organized as follows. A pest
management model with impulsive releasing and harvesting
is introduced in Section 2 and some useful preliminaries
are given in Section 3. Section 4 deals with stability and
permanence analysis of system. In this section, two sufficient
conditions are deduced including the locally and globally
asymptotical stability of the susceptible pest-eradication
2
Abstract and Applied Analysis
period solution, the permanence of system is also discussed.
A simple example and conclusions are given in Section 5.
Δ𝑥 (𝑡) = 0,
2. Model Description
Δ𝐼 (𝑡) = 𝛿𝐼 ,
In the following, to establish our pest management model, we
rely on the following biological assumptions.
Δ𝑦𝐽 (𝑡) = 𝛿𝐽 ,
(𝐴1) The pest population is divided into two classes, the
susceptible and infective. The infective pests neither
recover nor reproduce and infective pests cannot
damage crops. The disease is transmitted from infective pests to susceptible pests and does not propagate
to predators.
(𝐴2) In the absence of susceptible pests, the crops have
a logistic growth rate with intrinsic birth rate 𝑟 and
carrying capacity 𝐾.
(𝐴3) The predators (natural enemies) have an age structure, that is, immature and mature. Only the mature
predators have the ability to feed on susceptible pests,
but do not prey on infective pests and crops.
(𝐴4) The functional response of the susceptible pest is
described by the abstract function 𝑃1 , the functional
response of the mature predator is described by
the abstract function 𝑃2 , and the infection rate is
described by the abstract function 𝑔, where 𝑃1 , 𝑃2 , and
𝑔 satisfy certain assumptions outlined below.
On the basis of the above assumptions, we establish the
following impulsively controlled system:
𝑥 (𝑡) = 𝑟𝑥 (𝑡) (1 −
𝑥 (𝑡)
) − 𝑃1 (𝑥 (𝑡)) 𝑆 (𝑡) ,
𝐾
𝑆 (𝑡) = 𝛽𝑃1 (𝑥 (𝑡)) 𝑆 (𝑡) − 𝑔 (𝐼 (𝑡)) 𝑆 (𝑡)
− 𝑃2 (𝑆 (𝑡)) 𝑦𝑀 (𝑡) − 𝑑𝑆 𝑆 (𝑡) ,
Δ𝑆 (𝑡) = 0,
Δ𝑦𝑀 (𝑡) = 𝛿𝑀,
𝑡 = 𝑛𝑇, 𝑛 ∈ N,
(1)
where 𝑥(𝑡) represents the density of the crop at time 𝑡, 𝑆(𝑡)
represents the density of the susceptible pest at time 𝑡, 𝐼(𝑡)
represents the density of the infective pest at time 𝑡, 𝑦𝐽 (𝑡)
and 𝑦𝑀(𝑡) represent the density of the immature and mature
predator at time 𝑡, respectively; 𝑟 is the logistic intrinsic
growth rate of the crop in the absence of the susceptible
pest, 𝐾 is its carrying capacity; 0 < 𝛽, 𝜆 ≤ 1 represent
the conversion rate at which ingested preys in excess of
what is needed for maintenance is translated into predator
population increase; 𝑚 is the rate at which the immature
predators become the mature predators. 𝑑𝑆 , 𝑑𝐼 , 𝑑𝐽 , 𝑑𝑀 > 0
are the death rates of the susceptible pest population, infective
pest population, and of the immature and mature predator
population, respectively; Δ𝑥(𝑡) = 𝑥(𝑡+ ) − 𝑥(𝑡), Δ𝑆(𝑡) =
𝑆(𝑡+ ) − 𝑆(𝑡), Δ𝐼(𝑡) = 𝐼(𝑡+ ) − 𝐼(𝑡), Δ𝑦𝐽 (𝑡) = 𝑦𝐽 (𝑡+ ) − 𝑦𝐽 (𝑡),
Δ𝑦𝑀(𝑡) = 𝑦𝑀(𝑡+ ) − 𝑦𝑀(𝑡); 𝑇 is the period of the impulsive
effect; 𝛿 (0 ≤ 𝛿 < (1 − 𝑒−𝑟𝑇 )/2) is the harvesting rate of
crop population; 0 ≤ 𝑃𝑆 , 𝑃𝐼 , 𝑃𝐽 , 𝑃𝑀 < 1 denote the transfer
rate of susceptible pest population, infective pest population,
immature and mature predator population at every impulsive
period (𝑛 + 𝜏 − 1)𝑇 (𝑛 ∈ N, 0 < 𝜏 < 1), respectively; 𝛿𝐼 , 𝛿𝐽 ,
𝛿𝑀 > 0 represents the amount of infective pests, immature
and mature predators, respectively, which are released at
every impulsive period 𝑛𝑇 (𝑛 ∈ N), respectively; Also, 𝑃1 (⋅),
𝑃2 (⋅), 𝑔(⋅) ∈ 𝐻, here 𝐻 = {𝑓 : 𝑅 → 𝑅 | 𝑓(0) = 0, 𝑓 (𝑥) > 0
and 𝑓 (𝑥) ≤ 0 for all 𝑥 > 0}.
Some familiar examples of functions 𝑓 ∈ 𝐻 in the
biological literature include
𝐼 (𝑡) = 𝑔 (𝐼 (𝑡)) 𝑆 (𝑡) − 𝑑𝐼 𝐼 (𝑡) ,
(𝐹1) 𝑓1 (𝑥) = 𝑎𝑥, with 𝑎 > 0;
𝑦𝐽 (𝑡) = 𝜆𝑃2 (𝑆 (𝑡)) 𝑦𝑀 (𝑡) − 𝑑𝐽 𝑦𝐽 (𝑡) − 𝑚𝑦𝐽 (𝑡) ,
(𝐹2) 𝑓2 (𝑥) = 𝑎𝑥/(1 + 𝑏𝑥), with 𝑎, 𝑏 > 0;
𝑦𝑀
(𝑡) = 𝑚𝑦𝐽 (𝑡) − 𝑑𝑀𝑦𝑀 (𝑡) ,
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇,
𝑡 ≠ 𝑛𝑇,
Δ𝑥 (𝑡) = −𝛿𝑥 (𝑡) ,
Δ𝑆 (𝑡) = −𝑃𝑆 𝑆 (𝑡) ,
Δ𝐼 (𝑡) = −𝑃𝐼 𝐼 (𝑡) ,
Δ𝑦𝐽 (𝑡) = −𝑃𝐽 𝑦𝐽 (𝑡) ,
Δ𝑦𝑀 (𝑡) = −𝑃𝑀𝑦𝑀 (𝑡) ,
𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
(𝐹3) 𝑓3 (𝑥) = 𝑎(1 − 𝑒−𝑏𝑥 ), with 𝑎, 𝑏 > 0,
where functions (𝐹1) and (𝐹2) are known as Holling type
functional responses (see, [16–26]), and (𝐹3) belongs to Ivlev
type functional responses (see, [27–30]).
3. Preliminaries
In this section, we will give some definitions and lemmas,
which will be useful for our main results. Let R+ =
[0, ∞) and R5+ = {𝑋 = (𝑥(𝑡), 𝑆(𝑡), 𝐼(𝑡), 𝑦𝐽 (𝑡), 𝑦𝑀(𝑡)) ∈
R5 | 𝑥(𝑡), 𝑆(𝑡), 𝐼(𝑡), 𝑦𝐽 (𝑡), 𝑦𝑀(𝑡) ≥ 0}. Denote 𝑓 =
(𝑓𝑥 , 𝑓𝑆 , 𝑓𝐼 , 𝑓𝐽 , 𝑓𝑀)𝑇 the map defined by the right hand of the
first five equations in system (1). Let 𝑉 : R+ × R5+ → R+ ,
then 𝑉 ∈ 𝑉0 if
Abstract and Applied Analysis
3
(1) 𝑉 is continuous in ((𝑛 − 1)𝑇, (𝑛 + 𝜏 − 1)𝑇] × R5+ ,
((𝑛 + 𝜏 − 1)𝑇, 𝑛𝑇] × R5+ and for each 𝑥 ∈ 𝑅+5 , 𝑛 ∈ N,
lim(𝑡,𝑦) → ((𝑛+𝜏−1)𝑇+ ,𝑥) 𝑉(𝑡, 𝑦) = 𝑉((𝑛 + 𝜏 − 1)𝑇+ , 𝑥) and
lim(𝑡,𝑦) → (𝑛𝑇+ ,𝑥) 𝑉(𝑡, 𝑦) = 𝑉(𝑛𝑇+ , 𝑥) exist.
(2) 𝑉 is locally Lipschitzian 𝑥.
Definition 1. Letting 𝑉 ∈ 𝑉0 , one defines the upper right
derivative of 𝑉 with respect to the impulsive differential
system (1) at (𝑡, 𝑥) ∈ ((𝑛 − 1)𝑇, (𝑛 + 𝜏 − 1)𝑇] × R5+ and
((𝑛 + 𝜏 − 1)𝑇, 𝑛𝑇] × R5+ by
1
𝐷+ 𝑉 (𝑡, 𝑥) = lim sup [𝑉 (𝑡 + ℎ, 𝑥 + ℎ𝑓 (𝑡, 𝑥)) − 𝑉 (𝑡, 𝑥)] .
+
ℎ→0 ℎ
(2)
Definition 2. The system (1) is said to be permanent if there
are positive constants 𝑚, 𝑀 > 0 and a finite time 𝑇0 such
that all solutions of (1) with initial values 𝑥(0+ ), 𝑆(0+ ), 𝐼(0+ ),
𝑦𝐽 (0+ ), 𝑦𝑀(0+ ), 𝑚 ≤ 𝑥(𝑡), 𝑆(𝑡), 𝐼(𝑡), 𝑦𝐽 (𝑡), 𝑦𝑀(𝑡) ≤ 𝑀 hold for
all 𝑡 ≥ 𝑇0 , where 𝑚 and 𝑀 are independent of initial value,
𝑇0 may depend on initial value.
Lemma 5 (see [13, 15]). Consider the following system:
V (𝑡) ≤ (≥) 𝑝 (𝑡) V (𝑡) + 𝑞 (𝑡) ,
V (𝑡𝑘+ ) ≤ (≥) 𝑑𝑘 V (𝑡𝑘 ) + 𝑏𝑘 ,
𝑡 ≠ 𝑡𝑘 ,
𝑡 = 𝑡𝑘 , 𝑘 ∈ N,
V (0+ ) ≤ (≥) V0 ,
where 𝑝, 𝑞 ∈ 𝑃𝐶(R+ , R) and 𝑑𝑘 ≥ 0, V0 and 𝑏𝑘 are constants.
Suppose that
(𝐴1) the sequence 𝑡𝑘 satisfies 0 ≤ 𝑡1 ≤ 𝑡2 < ⋅ ⋅ ⋅ , with
lim𝑡 → ∞ 𝑡𝑘 = ∞;
(𝐴2) V ∈ 𝑃𝐶 (R+ , R) and V(𝑡) is left-continuous at 𝑡𝑘 , 𝑘 ∈
N.
Then, for 𝑡 > 0,
𝑡
V (𝑡) ≤ (≥) V0 𝑒∫0 𝑝(𝑠)𝑑𝑠 ∏ 𝑑𝑘
0<𝑡𝑘 <𝑡
Remark 3. The global existence and uniqueness of system (1)
is guaranteed by the smoothness properties of 𝑓 (for details,
see [13, 14]).
+ ∑ ( ∏ 𝑑𝑗 𝑒 𝑡𝑘
Lemma 4 (see [15]). Let 𝑉 : R+ × R𝑛 → R𝑚
+ satisfy 𝑉𝑖 ∈
𝑉0 , 𝑖 = 1, 2, . . . , 𝑚, and assume that
+ ∫ ( ∏ 𝑑𝑘 ) 𝑒∫𝑠 𝑝(𝜏)𝑑𝜏 𝑞 (𝑠) 𝑑𝑠.
𝐷+ 𝑉 (𝑡, 𝑥 (𝑡)) ≤ (≥) 𝑔 (𝑡, 𝑉 (𝑡, 𝑥 (𝑡))) ,
+
𝑉 (𝑡, 𝑥 (𝑡 )) ≤
(≥) 𝜓𝑘𝜏
(𝑉 (𝑡, 𝑥 (𝑡))) ,
𝑉 (𝑡, 𝑥 (𝑡+ )) ≤ (≥) 𝜓𝑘 (𝑉 (𝑡, 𝑥 (𝑡))) ,
𝑡≠ (𝑘 + 𝜏 − 1) 𝑇, 𝑘𝑇,
𝑡 = (𝑘 + 𝜏 − 1) 𝑇,
𝑡 = 𝑘𝑇, 𝑘 ∈ N,
+
𝑥 (0 ) = 𝑥0 ,
(3)
𝑚
where 𝑔 : R+ × R𝑚
+ → R+ is continuous in ((𝑘 − 1)𝑇, (𝑘 +
𝑚
𝜏 − 1)𝑇] × R and ((𝑘 + 𝜏 − 1)𝑇, 𝑘𝑇] × R𝑚 , for each 𝑝 ∈
R𝑚 , 𝑘 = 1, 2, . . ., the limit lim(𝑡,𝑞) → ((𝑘+𝜏−1)𝑇+ ,𝑝) 𝑔(𝑡, 𝑞) = 𝑔((𝑘+
𝜏 − 1)𝑇+ , 𝑝) and lim(𝑡,𝑞) → ((𝑘−1)𝑇+ ,𝑝) 𝑔(𝑡, 𝑞) = 𝑔((𝑘 − 1)𝑇+ , 𝑝)
exists. 𝑔(𝑡, 𝑞) is quasimonotone nondecreasing in 𝑞. 𝜓𝑘𝜏 , 𝜓𝑘 :
→ R𝑚
R𝑚
+
+ is nondecreasing for all 𝑘 ∈ N. Let 𝜃(𝑡) be
the maximal (𝑚𝑖𝑛𝑖𝑚𝑎𝑙) solution of the following impulsive
differential equation on [0, ∞):
𝑤 (𝑡) = 𝑔 (𝑡, 𝑤 (𝑡)) ,
𝑡 ≠ (𝑘 + 𝜏 − 1) 𝑇, 𝑘𝑇,
𝑤 (𝑡+ ) = 𝜓𝑘𝜏 (𝑤 (𝑡)) ,
𝑤 (𝑡+ ) = 𝜓𝑘 (𝑤 (𝑡)) ,
𝑡 = (𝑘 + 𝜏 − 1) 𝑇,
𝑡 = 𝑘𝑇, 𝑘 ∈ N,
(4)
(5)
𝑡
∫ 𝑝(𝑠)𝑑𝑠
0<𝑡𝑘 <𝑡
𝑡𝑘 <𝑡𝑗 <𝑡
𝑡
0
) 𝑏𝑘
(6)
𝑡
𝑠<𝑡𝑘 <𝑡
Lemma 6. There exists a constant 𝑀 = max{(1/𝜆)((𝐿/𝑑) +
(𝜌𝑒𝑑𝑇 /(𝑒𝑑𝑇 − 1))), 𝐾} > 0, such that 𝑥(𝑡), 𝑆(𝑡), 𝐼(𝑡), 𝑦𝐽 (𝑡),
𝑦𝑀(𝑡) ≤ 𝑀 for each solution of (1) with 𝑡 large enough.
Proof. Since 𝑥 (𝑡) ≤ 𝑟𝑥(1 − (𝑥(𝑡)/𝐾)), then 𝑥 (𝑡)|𝑥(𝑡)=𝐾 ≤ 0,
and 𝑥((𝑛 + 𝜏 − 1)𝑇+ ) ≤ 𝑥((𝑛 + 𝜏 − 1)𝑇) (0 < 𝛿 < 1), so
𝑥(𝑡) ≤ 𝐾 for 𝑡 large enough. Let us define 𝑉(𝑡) ∈ 𝑉0 by
𝑉(𝑡) = 𝜆𝛽𝑥(𝑡) + 𝜆𝑆(𝑡) + 𝜆𝐼(𝑡) + 𝑦𝐽 (𝑡) + 𝑦𝑀(𝑡) and denote
𝑑 = min{𝑑𝑆 , 𝑑𝐼 , 𝑑𝐽 , 𝑑𝑀}. Then, it is obvious that
𝜆𝛽𝑟𝑥2 (𝑡)
𝑑𝑉 (𝑡)
+ 𝑑𝑉 (𝑡) ≤ 𝜆𝛽 (𝑟 + 𝑑) 𝑥 (𝑡) −
,
𝑑𝑡
𝐾
(7)
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇, 𝑡 ≠ 𝑛𝑇.
Since the right-hand side (7) is bounded from above by 𝐿 =
𝐾𝜆𝛽(𝑟 + 𝑑)2 /4𝑟, it follows that
𝑑𝑉 (𝑡)
+ 𝑑𝑉 (𝑡) ≤ 𝐿,
𝑑𝑡
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇, 𝑡 ≠ 𝑛𝑇.
(8)
When 𝑡 = (𝑛 + 𝜏 − 1)𝑇 and 𝑡 = 𝑛𝑇, it is easy to obtain that
𝑤 (0+ ) = 𝑤0 .
+
Then for any solution 𝑥(𝑡) of the system (3), 𝑉(0 ,
𝑥0 ) ≤ (≥)𝑤0 implies that 𝑉(𝑡, 𝑥(𝑡)) ≤ (≥)𝜃(𝑡) for all 𝑡 ≥ 0.
𝑉 ((𝑛 + 𝜏 − 1) 𝑇+ ) ≤ 𝑉 ((𝑛 + 𝜏 − 1) 𝑇) ,
𝑉 (𝑛𝑇+ ) = 𝑉 (𝑛𝑇) + (𝜆𝛿𝐼 + 𝛿𝐽 + 𝛿𝑀) .
(9)
4
Abstract and Applied Analysis
Lemma 9. Let one consider the following impulsive control
subsystem:
Then, by Lemma 5, we can obtain that
𝑡
𝑉 (𝑡) ≤ 𝑉 (0) 𝑒−𝑑𝑡 + ∫ 𝐿𝑒−𝑑(𝑡−𝑠) 𝑑𝑠
𝑧 (𝑡) = 𝑎 (𝑡) − 𝑑𝑧 (𝑡) ,
0
+ ∑ 𝜌𝑒−𝑑(𝑡−𝑘𝑇) →
0<𝑘𝑇<𝑡
𝑑𝑇
𝜌𝑒
𝐿
,
+ 𝑑𝑇
𝑑 𝑒 −1
Δ𝑧 (𝑡) = −𝑝𝑧 (𝑡) ,
𝑡 → ∞,
Δ𝑧 (𝑡) = 𝛿,
(10)
where 𝜌 = 𝜆𝛿𝐼 + 𝛿𝐽 + 𝛿𝑀. So it follows that 𝑉(𝑡) is uniformly
bounded on [0, ∞). The proof is completed.
Lemma 7 (see [31]). Let one consider the following impulsive
control subsystem:
𝑥 (𝑡) = 𝑟𝑥 (𝑡) (1 −
𝑥 (𝑡)
),
𝐾
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇,
(11)
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇, 𝑡 ≠ 𝑛𝑇,
𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
𝑧 (0+ ) = 𝑧0 ,
where 𝑎(𝑡) is a 𝑇-periodic 𝑃𝐶(R+ , R) function. 𝑝, 𝑑 are the
positive real constants and 𝑝 < 1. Then system (14) has a unique
T-periodic solution 𝑧∗ (𝑡), and for each solution 𝑧(𝑡) of (14),
𝑧(𝑡) → 𝑧∗ (𝑡) as 𝑡 → ∞, where
𝑧∗ (𝑡) = 𝑒−𝑑(𝑡−(𝑛−1)𝑇) (𝑧∗ (0+ ) + ∫
𝑡−(𝑛−1)𝑇
0
Δ𝑥 (𝑡) = −𝛿𝑥 (𝑡) , 𝑡 = (𝑛 + 𝜏 − 1) 𝑇.
𝑧∗ (𝑡) = 𝑒−𝑑(𝑡−(𝑛−1)𝑇) (𝑧∗ (𝜏𝑇+ ) 𝑒𝑑𝜏𝑇 + ∫
(2) If 𝛿 < 𝛿0∗ , then the system (11) has a unique positive
periodic solution 𝑥∗ (𝑡), which is globally asymptotically
stable, where
𝐾 (1 − 𝛿 − 𝑒−𝑟𝑇 )
𝐾 ((1 − 𝛿) 𝑒
(𝑒𝑟𝜏𝑇
− 1) + (1 −
𝑧∗ (0+ )
𝜏𝑇
=
=
− 1)
𝛿) (𝑒𝑟𝑇
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] ,
𝑇
[(1 − 𝑝) ∫0 𝑎 (𝑠) 𝑒𝑑𝑠 𝑑𝑠 + ∫𝜏𝑇 𝑎 (𝑠) 𝑒𝑑𝑠 𝑑𝑠] 𝑒−𝑑𝑇 + 𝛿
1 − (1 − 𝑝) 𝑒−𝑑𝑇
𝜏𝑇
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, (𝑛 + 𝜏) 𝑇] , 𝑛 ∈ N,
𝑥∗ (0+ ) = 𝑥∗ (𝑛𝑇+ ) =
𝑎 (𝑠) 𝑒𝑑𝑠 𝑑𝑠) ,
,
𝑧∗ (𝜏𝑇+ )
,
1 − 𝛿 − 𝑒−𝑟𝑇 + 𝛿𝑒−𝑟(𝑡−(𝑛+𝜏−1)𝑇)
𝑟𝑇
𝑡−(𝑛−1)𝑇
𝜏𝑇
(1) If 𝛿 > 𝛿0∗ , then the trivial periodic solution of system
(11) is locally asymptotically stable.
𝑥 (𝑡) =
𝑎 (𝑠) 𝑒𝑑𝑠 𝑑𝑠) ,
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
Suppose 𝛿0∗ = 1 − 𝑒−𝑟𝑇 . Then one has the following results.
∗
(14)
𝑡 = 𝑛𝑇, 𝑛 ∈ N,
−
𝑒𝑟𝜏𝑇)
𝑇
(1 − 𝑝) [∫0 𝑎 (𝑠) 𝑒𝑑𝑠 𝑑𝑠 + 𝑒−𝑑𝑇 ∫𝜏𝑇 𝑎 (𝑠) 𝑒𝑑𝑠 𝑑𝑠 + 𝛿] 𝑒−𝑑𝜏𝑇
1 − (1 − 𝑝) 𝑒−𝑑𝑇
(15)
.
(12)
Proof. First, it is easy to obtain that
𝑡
𝑧 (𝑡) = 𝑒−𝑑𝑡 (𝑧 (0+ ) + ∫ 𝑎 (𝑠) 𝑒𝑑𝑠 𝑑𝑠) ,
Remark 8. From Lemma 7, we have
0
(1𝑎) if 𝛿0∗ > 2𝛿, then 𝑥∗ (𝑡) > 𝐾/2 for all 𝑡 ≥ 0;
𝑡 ∈ (0, 𝜏𝑇] ,
𝑡
𝑧 (𝑡) = 𝑒−𝑑(𝑡−𝜏𝑇) 𝑧 (𝜏𝑇+ ) + 𝑒−𝑑𝑡 ∫ 𝑎 (𝑠) 𝑒𝑑𝑠 𝑑𝑠,
𝜏𝑇
(2𝑎) if 𝑡 ∈ ((𝑛 − 1)𝑇, 𝑛𝑇], 𝑛 ∈ N, then the periodic solution
𝑥∗ (𝑡) can be rewritten in the form
𝐾 (1 − 𝛿 − 𝑒−𝑟𝑇 )
{
{
,
{
{
{
1 − 𝛿 − 𝑒−𝑟𝑇 + 𝛿𝑒−𝑟(𝑇−𝜏𝑇) 𝑒−𝑟(𝑡−(𝑛−1)𝑇)
{
{
{
{
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
𝑥∗ (𝑡) = {
{
𝐾 (1 − 𝛿 − 𝑒−𝑟𝑇 )
{
{
{
,
{
{
{ 1 − 𝛿 − 𝑒−𝑟𝑇 + 𝛿𝑒−𝑟(𝑡−(𝑛+𝜏−1)𝑇)
{
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] , 𝑛 ∈ N.
{
.
𝑡 ∈ (𝜏𝑇, 𝑇] .
(16)
Since the T-periodicity requirement, we have
(13)
𝑧∗ (𝜏𝑇+ ) = 𝑒−𝑑𝜏𝑇 (𝑧∗ (0+ ) + ∫
𝜏𝑇
0
∗
+
−𝑑(𝑇−𝜏𝑇) ∗
𝑧 (0 ) = 𝑒
+
𝑎 (𝑠) 𝑒𝑑𝑠 𝑑𝑠) (1 − 𝑝) ,
−𝑑𝑇
𝑧 (𝜏𝑇 ) + 𝑒
𝑇
(17)
𝑑𝑠
∫ 𝑎 (𝑠) 𝑒 𝑑𝑠 + 𝛿.
𝜏𝑇
Abstract and Applied Analysis
5
𝑥 (𝑡) = 𝑟𝑥 (𝑡) (1 −
By (17), we can obtain that
𝐼 (𝑡) = −𝑑𝐼 𝐼 (𝑡) ,
𝑧∗ (0+ )
𝜏𝑇
=
𝑦𝐽 (𝑡) = − (𝑑𝐽 + 𝑚) 𝑦𝐽 (𝑡) ,
𝑇
[(1 − 𝑝) ∫0 𝑎 (𝑠) 𝑒𝑑𝑠 𝑑𝑠 + ∫𝜏𝑇 𝑎 (𝑠) 𝑒𝑑𝑠 𝑑𝑠] 𝑒−𝑑𝑇 + 𝛿
1 − (1 −
𝑝) 𝑒−𝑑𝑇
𝑦𝑀
(𝑡) = 𝑚𝑦𝐽 (𝑡) − 𝑑𝑀𝑦𝑀 (𝑡) ,
,
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇,
𝑧∗ (𝜏𝑇+ )
𝑡 ≠ 𝑛𝑇,
𝜏𝑇
=
𝑥 (𝑡)
),
𝐾
𝑑𝑠
−𝑑𝑇
(1 − 𝑝) [∫0 𝑎 (𝑠) 𝑒 𝑑𝑠 + 𝑒
1 − (1 −
𝑇
𝑑𝑠
−𝑑𝜏𝑇
∫𝜏𝑇 𝑎 (𝑠) 𝑒 𝑑𝑠 + 𝛿] 𝑒
.
𝑝) 𝑒−𝑑𝑇
(18)
Δ𝑥 (𝑡) = −𝛿𝑥 (𝑡) ,
Δ𝐼 (𝑡) = −𝑃𝐼 𝐼 (𝑡) ,
Δ𝑦𝐽 (𝑡) = −𝑃𝐽 𝑦𝐽 (𝑡) ,
Δ𝑦𝑀 (𝑡) = −𝑃𝑀𝑦𝑀 (𝑡) ,
So, we will obtain the T-periodic solution of (14):
𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
Δ𝑥 (𝑡) = 0,
𝑧∗ (𝑡) = 𝑒−𝑑(𝑡−(𝑛−1)𝑇) (𝑧∗ (0+ ) + ∫
𝑡−(𝑛−1)𝑇
0
Δ𝐼 (𝑡) = 𝛿𝐼 ,
𝑎 (𝑠) 𝑒𝑑𝑠 𝑑𝑠) ,
Δ𝑦𝐽 (𝑡) = 𝛿𝐽 ,
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
𝑧∗ (𝑡) = 𝑒−𝑑(𝑡−(𝑛−1)𝑇) (𝑧∗ (𝜏𝑇+ ) 𝑒𝑑𝜏𝑇 + ∫
𝑡−(𝑛−1)𝑇
𝜏𝑇
𝑎 (𝑠) 𝑒𝑑𝑠 𝑑𝑠) ,
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] .
(19)
Let 𝑍(𝑡) = 𝑧(𝑡) − 𝑧∗ (𝑡). Substituting 𝑍(𝑡) into (14), we have
𝑍 (𝑡) = −𝑑𝑍 (𝑡) ,
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇, 𝑡 ≠ 𝑛𝑇,
Δ𝑍 (𝑡) = −𝑝𝑍 (𝑡) ,
Δ𝑍 (𝑡) = 0,
𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
𝑡 = 𝑛𝑇, 𝑛 ∈ N,
(20)
𝑍 (0+ ) = 𝑧0 − 𝑧∗ (0+ ) .
+
−𝑑𝑡
Then, 𝑍(𝑡) = 𝑍(0 )𝑒 ∏0<(𝑛+𝜏−1)𝑇<𝑡 (1−𝑝) → 0, as 𝑡 → ∞.
The proof is completed.
4. Main Results
4.1. Local and Global Stability. In this section, we will study
the existence and stability of the system (1) susceptible pest∗
(𝑡)).
eradication periodic solution (𝑥∗ (𝑡), 0, 𝐼∗ (𝑡), 𝑦𝐽∗ (𝑡), 𝑦𝑀
To this purpose, it is seen first that when 𝑆(𝑡) = 0, system
(1) can be rewritten in the form
Δ𝑦𝑀 (𝑡) = 𝛿𝑀,
𝑡 = 𝑛𝑇,
(21)
which describes the dynamics of system (1) in the absence
of the susceptible pest population. So, when 𝑡 ∈ ((𝑛 −
1)𝑇, 𝑛𝑇](𝑛 ∈ N), we can calculate the T-periodic solution of
(21) by Lemmas 7 and 9. It is seen that
𝐾 (1 − 𝛿 − 𝑒−𝑟𝑇 )
{
{
{
,
{
{
1 − 𝛿 − 𝑒−𝑟𝑇 + 𝛿𝑒−𝑟(𝑇−𝜏𝑇) 𝑒−𝑟(𝑡−(𝑛−1)𝑇)
{
{
{
{
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
𝑥∗ (𝑡) = {
{
𝐾
(1 − 𝛿 − 𝑒−𝑟𝑇 )
{
{
{
,
{
−𝑟𝑇
−𝑟(𝑡−(𝑛+𝜏−1)𝑇)
{
{
{ 1 − 𝛿 − 𝑒 + 𝛿𝑒
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] ,
{
(22)
𝛿𝐼 𝑒−𝑑𝐼 (𝑡−(𝑛−1)𝑇)
{
{
,
{
{
1 − (1 − 𝑃𝐼 ) 𝑒−𝑑𝐼 𝑇
{
{
{
{
{
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
𝐼∗ (𝑡) = {
{ 𝛿𝐼 (1 − 𝑃𝐼 ) 𝑒−𝑑𝐼 (𝑡−(𝑛−1)𝑇)
{
{
,
{
{
−𝑑𝐼 𝑇
{
{
{ 1 − (1 − 𝑃𝐼 ) 𝑒
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] ,
{
(23)
𝛿𝐽 𝑒−(𝑚+𝑑𝐽 )(𝑡−(𝑛−1)𝑇)
{
{
{
,
{
{
{ 1 − (1 − 𝑃𝐽 ) 𝑒−(𝑚+𝑑𝐽 )𝑇
{
{
{
{
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
𝑦𝐽∗ (𝑡) = {
{
𝛿
(1
− 𝑃𝐽 ) 𝑒−(𝑚+𝑑𝐽 )(𝑡−(𝑛−1)𝑇)
{
𝐽
{
{
,
{
{ 1 − (1 − 𝑃𝐽 ) 𝑒−(𝑚+𝑑𝐽 )𝑇
{
{
{
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] ,
{
(24)
6
Abstract and Applied Analysis
∗
𝑦𝑀
(𝑡)
−𝑑𝑀 (𝑡−(𝑛−1)𝑇)
∗
(𝑦𝑀
(0+ ) + 𝐴 (𝑡 − (𝑛 − 1) 𝑇)) ,
{𝑒
{
{
{
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
= { −𝑑𝑀 (𝑡−(𝑛−1)𝑇) ∗
{
𝑒
(𝑦𝑀 (𝜏𝑇+ ) 𝑒𝑑𝑀 𝜏𝑇 + 𝐵 (𝑡 − (𝑛 − 1) 𝑇)) ,
{
{
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] ,
{
(25)
∗
𝑦𝑀
(0+ ) =
∗
(𝜏𝑇+ ) =
𝑦𝑀
[(1 − 𝑃𝑀) 𝐴 (𝜏𝑇) + 𝐵 (𝑇)] 𝑒−𝑑𝑀 𝑇 + 𝛿𝑀
,
1 − (1 − 𝑃𝑀) 𝑒−𝑑𝑀 𝑇
(26)
(1 − 𝑃𝑀) [𝐴 (𝜏𝑇) + 𝑒−𝑑𝑀 𝑇 𝐵 (𝑇) + 𝛿𝑀] 𝑒−𝑑𝑀 𝜏𝑇
1 − (1 − 𝑃𝑀) 𝑒−𝑑𝑀 𝑇
In the following, we present two main results with the
locally and globally asymptotical stability of the susceptible
pest-eradication periodic solution (𝑥∗ (𝑡), 0, 𝐼∗ (𝑡), 𝑃𝐽∗ (𝑡),
∗
𝑃𝑀
(𝑡)).
,
(27)
𝑇
𝑇
0
0
𝛽 ∫ 𝑃1 (𝑥∗ (𝑡)) 𝑑𝑡 − ∫ 𝑔 (𝐼∗ (𝑡)) 𝑑𝑡
−
(𝑑𝑀 −(𝑚+𝑑𝐽 ))𝑡
𝑚𝛿𝐽 (𝑒
− 1)
(1 − (1 − 𝑃𝐽 ) 𝑒−(𝑚+𝑑𝐽 )𝑇 ) (𝑑𝑀 − (𝑚 + 𝑑𝐽 ))
,
𝑚𝛿𝐽 (1 − 𝑃𝐽 ) (𝑒(𝑑𝑀 −(𝑚+𝑑𝐽 ))𝑡 − 𝑒(𝑑𝑀 −(𝑚+𝑑𝐽 ))𝜏𝑇 )
(1 − (1 − 𝑃𝐽 ) 𝑒−(𝑚+𝑑𝐽 )𝑇 ) (𝑑𝑀 − (𝑚 + 𝑑𝐽 ))
𝑃2
(0) ∫
𝑇
0
∗
𝑦𝑀
(𝑡) 𝑑𝑡
1
,
− 𝑑𝑆 𝑇 < ln
1 − 𝑃𝑆
(30)
then the susceptible pest-eradication periodic solution (𝑥∗ (𝑡), 0,
∗
(𝑡)) of system (1) is locally asymptotically stable.
𝐼∗ (𝑡), 𝑦𝐽∗ (𝑡), 𝑦𝑀
𝑡 ∈ (0, 𝜏𝑇] ,
𝐵 (𝑡) =
(3) unstable if there is a Floquet multipliers 𝜆 𝑖 (1 ≤ 𝑖 ≤ 𝑛)
of (29) such that |𝜆 𝑖 | > 1.
Theorem 11. If
where
𝐴 (𝑡) =
(2) asymptotically stable if and only if all Floquet multipliers 𝜆 𝑖 (1 ≤ 𝑖 ≤ 𝑛) of (29) satisfy |𝜆 𝑖 | < 1;
Proof. Let (𝑥(𝑡), 𝑆(𝑡), 𝐼(𝑡), 𝑦𝐽 (𝑡), 𝑦𝑀(𝑡)) be any solution of
system (1). We define error 𝑒1 (𝑡) = 𝑥(𝑡) − 𝑥∗ (𝑡), 𝑒2 (𝑡) =
𝑆(𝑡), 𝑒3 (𝑡) = 𝐼(𝑡) − 𝐼∗ (𝑡), 𝑒4 (𝑡) = 𝑦𝐽 (𝑡) − 𝑦𝐽∗ (𝑡), 𝑒5 (𝑡) =
∗
𝑦𝑀(𝑡) − 𝑦𝑀
(𝑡). The linearized system of (1) at (𝑥∗ (𝑡),
∗
∗
∗
(𝑡)) is
0, 𝐼 (𝑡), 𝑦𝐽 (𝑡), 𝑦𝑀
,
𝑡 ∈ (𝜏𝑇, 𝑇] .
(28)
To discuss the locally asymptotical stability of the susceptible
pest-eradication periodic solution, we now introduce the
Floquet theory for a linear impulsive control system:
𝜔 (𝑡) = 𝐴 (𝑡) 𝜔 (𝑡) ,
Δ𝜔 (𝑡) = 𝐵𝑘 𝜔 (𝑡) ,
𝑡 ≠ 𝜏𝑘 ,
𝑡 = 𝜏𝑘 , 𝑘 ∈ N,
(29)
under the following conditions:
𝑒1 (𝑡) = (𝑟 − 2𝑟
𝑥∗ (𝑡)
) 𝑒1 (𝑡) − 𝑃1 (𝑥∗ (𝑡)) 𝑒2 (𝑡) ,
𝐾
∗
𝑒2 (𝑡) = (𝛽𝑃1 (𝑥∗ (𝑡)) − 𝑔 (𝐼∗ (𝑡)) − 𝑃2 (0) 𝑦𝑀
(𝑡) − 𝑑𝑆 ) 𝑒2 (𝑡) ,
𝑒3 (𝑡) = 𝑔 (𝐼∗ (𝑡)) 𝑒2 (𝑡) − 𝑑𝐼 𝑒3 (𝑡) ,
∗
𝑒4 (𝑡) = 𝜆𝑃2 (0) 𝑦𝑀
(𝑡) 𝑒2 (𝑡) − (𝑑𝐽 + 𝑚) 𝑒4 (𝑡) ,
𝑒5 (𝑡) = 𝑚𝑒4 (𝑡) − 𝑑𝑀𝑒5 (𝑡) ,
H1: 𝐴(⋅) ∈ PC(R, 𝑀𝑛 (R)) and 𝐴(𝑡 + 𝑇) = 𝐴(𝑡) for 𝑡 ≥ 0.
𝑡≠ (𝑛 + 𝜏 − 1) 𝑇,
H2: 𝐵𝑘 ∈ 𝑀𝑛 , det(𝐼𝑛 + 𝐵𝑘 ) ≠ 0, 𝜏𝑘 < 𝜏𝑘+1 for 𝑘 ∈ N, and 𝐼𝑛
denotes the 𝑛 × 𝑛 real identity matrix.
H3: There is a 𝑞 ∈ N such that 𝐵𝑘+𝑞 = 𝐵𝑘 , 𝜏𝑘+𝑞 = 𝜏𝑘 + 𝑇
for 𝑘 ∈ N.
Let Ψ(𝑡) be a fundamental matrix of (29), then there is a
unique reversible matrix 𝑀 ∈ 𝑀𝑛 (R) such that Ψ(𝑡 + 𝑇) =
Ψ(𝑡)𝑀 for all 𝑡 ∈ R, which is called the monodromy matrix
of (29) corresponding to Ψ. All monodromy matrices of (29)
are similar and they have the same eigenvalues 𝜆 1 , 𝜆 2 , . . . , 𝜆 𝑛 ,
which are called the Floquet multipliers of (29).
Lemma 10 (see [13] (Floquet theory)). Let the conditions H1–
H3 hold. Then system (29) have the following properties
(1) stable if and only if all Floquet multipliers 𝜆 𝑖 (1 ≤ 𝑖 ≤
𝑛) of (29) satisfy |𝜆 𝑖 | ≤ 1 and moreover, to those 𝜆 𝑖
for which |𝜆 𝑖 | = 1, there correspond simple elementary
divisors;
𝑡 ≠ 𝑛𝑇,
Δ𝑒1 (𝑡) = −𝛿𝑒1 (𝑡) ,
Δ𝑒2 (𝑡) = −𝑃𝑆 𝑒2 (𝑡) ,
Δ𝑒3 (𝑡) = −𝑃𝐼 𝑒3 (𝑡) ,
Δ𝑒4 (𝑡) = −𝑃𝐽 𝑒4 (𝑡) ,
Δ𝑒5 (𝑡) = −𝑃𝑀𝑒5 (𝑡) ,
𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
Δ𝑒1 (𝑡) = Δ𝑒2 (𝑡) = Δ𝑒3 (𝑡) = Δ𝑒4 (𝑡) = Δ𝑒5 (𝑡) = 0,
𝑡 = 𝑛𝑇.
(31)
Let Ψ(𝑡) be the fundamental matrix of (31), then Ψ(𝑡) satisfies
Abstract and Applied Analysis
7
𝑥∗ (𝑡)
𝑃1 (𝑥∗ (𝑡))
𝐾
∗
0
𝛽𝑃1 (𝑥∗ (𝑡)) − 𝑔 (𝐼∗ (𝑡)) − 𝑃2 (0) 𝑦𝑀
(𝑡) − 𝑑𝑆
0
0
0
0
0
0
−𝑑𝐼
0
0
− (𝑑𝐽 + 𝑚)
0
𝑚
𝑟 − 2𝑟
𝑑Ψ (𝑡) (
=(
(
𝑑𝑡
∗
0
𝑔 (𝐼 (𝑡))
𝜆𝑃2
0
∗
(0) 𝑦𝑀
(𝑡)
0
(
0
)
)
0 ) Ψ (𝑡) .
(32)
0
−𝑑𝑀)
Then, a fundamental matrix Ψ(𝑡) (Ψ(0) = 𝐼4 ) of (31) is
𝑡
𝑒∫0 (𝑟−2𝑟(𝑥
∗
(𝑠)/𝐾))𝑑𝑠
0
(
(
Ψ (𝑡) = (
(
(
𝜙12 (𝑡)
𝑡
∗
∫0 (𝛽𝑃1 (𝑥∗ (𝑠))−𝑔(𝐼∗ (𝑠))−𝑃2 (0)𝑦𝑀
(𝑠)−𝑑𝑆 )𝑑𝑠
𝑒
0
0
0
0 )
)
,
0 )
)
0
0
0
−𝑑𝐼 𝑡
0
0
𝜙32 (𝑡)
0
𝜙42 (𝑡)
0
𝑒−(𝑑𝐽 +𝑚)𝑡
0
𝜙52 (𝑡)
0
𝜙54 (𝑡)
where
𝑒
(33)
𝑒−𝑑𝑀 𝑡 )
The resetting impulsive condition of (31) becomes
𝑡
𝜙12 (𝑡) = − 𝑒− ∫0 (𝑟−2𝑟(𝑥
𝑡
∗
∗
𝑒1 ((𝑛 + 𝜏 − 1) 𝑇+ )
𝑒2 ((𝑛 + 𝜏 − 1) 𝑇+ )
(𝑒3 ((𝑛 + 𝜏 − 1) 𝑇+ ))
𝑒4 ((𝑛 + 𝜏 − 1) 𝑇+ )
𝑒5 ((𝑛 + 𝜏 − 1) 𝑇+ )
(𝑠)/𝐾))𝑑𝑠
1−𝛿
0
0
0
0
0
0
0
0 1 − 𝑃𝑆
0
0 )
0
1 − 𝑃𝐼
=( 0
0
0
0
0
1 − 𝑃𝐽
0
0
0
0
1 − 𝑃𝑀
𝑠
∗
∫0 (𝛽𝑃1 (𝑥∗ (𝜉))−𝑔(𝐼∗ (𝜉))−𝑃2 (0)𝑦𝑀
(𝜉)−𝑑𝑆 )𝑑𝜉
× ∫ 𝑃1 (𝑥 (𝑠)) 𝑒
0
𝑠
× 𝑒∫0 (𝑟−2𝑟(𝑥
∗
(𝜉)/𝐾))𝑑𝜉
𝑑𝑠,
𝜙32 (𝑡)
𝑡
𝑠
= 𝑒−𝑑𝐼 𝑡 ∫ 𝑔 (𝐼∗ (𝑠)) 𝑒∫0 (𝛽𝑃1 (𝑥
∗
∗
(𝜉))−𝑔(𝐼∗ (𝜉))−𝑃2 (0)𝑦𝑀
(𝜉)−𝑑𝑆 )𝑑𝜉
0
× 𝑒𝑑𝐼 𝑠 𝑑𝑠,
𝜙42 (𝑡)
𝑡
𝑠
∗
= 𝑒−𝑑𝐽 𝑡 ∫ 𝜆𝑃2 (0) 𝑦𝑀
(𝑠) 𝑒∫0 (𝛽𝑃1 (𝑥
∗
∗
(𝜉))−𝑔(𝐼∗ (𝜉))−𝑃2 (0)𝑦𝑀
(𝜉)−𝑑𝑆 )𝑑𝜉
𝑒1 ((𝑛 + 𝜏 − 1) 𝑇)
𝑒2 ((𝑛 + 𝜏 − 1) 𝑇)
× (𝑒3 ((𝑛 + 𝜏 − 1) 𝑇)) ,
𝑒4 ((𝑛 + 𝜏 − 1) 𝑇)
𝑒5 ((𝑛 + 𝜏 − 1) 𝑇)
𝑒1 (𝑛𝑇+ )
1
𝑒2 (𝑛𝑇+ )
0
(𝑒3 (𝑛𝑇+ )) = (0
0
𝑒4 (𝑛𝑇+ )
0
𝑒5 (𝑛𝑇+ )
0
1
0
0
0
0
0
1
0
0
0
0
0
1
0
0
𝑒1 (𝑛𝑇)
𝑒2 (𝑛𝑇)
0
0) (𝑒3 (𝑛𝑇)) .
𝑒4 (𝑛𝑇)
0
𝑒5 (𝑛𝑇)
1
0
𝑑𝐽 𝑠
× 𝑒 𝑑𝑠,
Then, it is easy to obtain all eigenvalues of
𝑡
𝜙52 (𝑡) = 𝑒−𝑑𝑀 𝑡 ∫ 𝑚𝜙42 (𝑠) 𝑒𝑑𝑀 𝑠 𝑑𝑠,
0
−(𝑑𝐽 +𝑚)𝑡
𝜙54 (𝑡) =
𝑚 (𝑒
−𝑑𝑀 𝑡
−𝑒
𝑑𝑀 − (𝑑𝐽 + 𝑚)
)
.
(34)
1−𝛿
0
0
0
0
0
0
0
0 1 − 𝑃𝑆
0
0 )
0
1 − 𝑃𝐼
𝑀= ( 0
0
0
0
0
1 − 𝑃𝐽
0
0
0
0
1 − 𝑃𝑀
(35)
8
Abstract and Applied Analysis
1
0
× (0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
1
0
𝑦𝑀
(𝑡) = 𝑚𝑦𝐽 (𝑡) − 𝑑𝑀𝑦𝑀 (𝑡) ,
0
0
0) Ψ (𝑇) .
0
1
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇,
𝑡 ≠ 𝑛𝑇,
Δ𝑥 (𝑡) = −𝛿𝑥 (𝑡) ,
(36)
𝑇
We have 𝜆 1 = (1 − 𝛿)𝑒∫0 (𝑟−2𝑟(𝑥
𝑇
∗
∗
∗
(𝑠)/𝐾))𝑑𝑠
∗
Δ𝐼 (𝑡) = −𝑃𝐼 𝐼 (𝑡) ,
, 𝜆 2 = (1 − 𝑃𝑆 )
Δ𝑦𝐽 (𝑡) = −𝑃𝐽 𝑦𝐽 (𝑡) ,
𝑒∫0 (𝛽𝑃1 (𝑥 (𝑠))−𝑔(𝐼 (𝑠))−𝑃2 (0)𝑦𝑀 (𝑠)−𝑑𝑆 )𝑑𝑠 , 𝜆 3 = (1 − 𝑃𝐼 )𝑒−𝑑𝐼 𝑇 < 1,
𝜆 4 = (1 − 𝑃𝐽 )𝑒−(𝑑𝐽 +𝑚)𝑇 < 1 and 𝜆 5 = (1 − 𝑃𝑀)𝑒−𝑑𝑀 𝑇 < 1. Since
𝑥∗ (𝑡) > (𝐾/2), so 𝜆 1 < 1. By the condition (30), we have 𝜆 2 <
1. Therefore, according to Lemma 10, the susceptible pest∗
(𝑡)) of
eradication periodic solution (𝑥∗ (𝑡), 0, 𝐼∗ (𝑡), 𝑦𝐽∗ (𝑡), 𝑦𝑀
system (1) is locally asymptotically stable. The proof is
completed.
Δ𝑦𝑀 (𝑡) = −𝑃𝑀𝑦𝑀 (𝑡) ,
𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
Δ𝑥 (𝑡) = 0,
Δ𝐼 (𝑡) = 𝛿𝐼 ,
Δ𝑦𝐽 (𝑡) = 𝛿𝐽 ,
Theorem 12. If
𝑇
Δ𝑦𝑀 (𝑡) = 𝛿𝑀,
𝑇
𝛽 ∫ 𝑃1 (𝑥∗ (𝑡)) 𝑑𝑡 − ∫ 𝑔 (𝐼∗ (𝑡)) 𝑑𝑡
0
0
𝑇
∗
− min 𝑃2 (𝜛) ∫ 𝑦𝑀
(𝑡) 𝑑𝑡 − 𝑑𝑆 𝑇 < ln
0≤𝜛≤𝑈𝑆
0
1
,
1 − 𝑃𝑆
where 𝑈𝑆 is an ultimate boundedness constant for S, then
the susceptible pest-eradication periodic solution (𝑥∗ (𝑡), 0,
∗
(𝑡)) of system (1) is globally asymptotically
𝐼∗ (𝑡), 𝑦𝐽∗ (𝑡), 𝑦𝑀
stable.
(40)
From the first equation of system (40), we obtain the
following comparison system:
] (𝑡) = 𝑟] (𝑡) (1 −
] (𝑡)
),
𝐾
Δ] (𝑡) = −𝛿] (𝑡) ,
Proof. Since
𝑇
𝑇
𝛽 ∫ 𝑃1 (𝑥∗ (𝑡)) 𝑑𝑡 − ∫ 𝑔 (𝐼∗ (𝑡)) 𝑑𝑡
0
−
𝑡 = 𝑛𝑇, 𝑛 ∈ N.
(37)
0
min 𝑃
0≤𝜛≤𝑈𝑆 2
(𝜛) ∫
𝑇
0
∗
𝑦𝑀
(𝑡) 𝑑𝑡
1
− 𝑑𝑆 𝑇 < ln
,
1 − 𝑃𝑆
(38)
𝑥 (𝑡) ≤ 𝑥∗ (𝑡) + 𝜀.
0
𝑇
∗ (𝑡) − 𝜀) 𝑑𝑡 − 𝑑 𝑇
− min 𝑃2 (𝜛) ∫ (𝑦𝑀
𝑆
0≤𝜛≤𝑈𝑆
− ln
0
(39)
1
= 𝜖 < 0,
1 − 𝑃𝑆
∗ (𝑡) is defined in the following. According to system
where 𝑦𝑀
(1), we have
𝑥 (𝑡) ≤ 𝑟𝑥 (𝑡) (1 −
𝑥 (𝑡)
),
𝐾
𝐼 (𝑡) ≥ −𝑑𝐼 𝐼 (𝑡) ,
𝑦𝐽 (𝑡) ≥ −𝑑𝐽 𝑦𝐽 (𝑡) − 𝑚𝑦𝐽 (𝑡) ,
(42)
Let us define 𝑉(𝑡) = (𝑉1 (𝑡), 𝑉2 (𝑡))𝑇 ∈ 𝐶[R+ × R2 , R2+ ] and
𝑉𝑖 (𝑡) ∈ 𝑉0 , (𝑖 = 1, 2), where 𝑉1 (𝑡) = 𝐼(𝑡), 𝑉2 (𝑡) = 𝑦𝐽 (𝑡). Then,
we have
𝑇
𝛽 ∫ 𝑃1 (𝑥∗ (𝑡) + 𝜀) 𝑑𝑡 − ∫ 𝑔 (𝐼∗ (𝑡) − 𝜀) 𝑑𝑡
0
(41)
𝑡 = (𝑛 + 𝜏 − 1) 𝑇.
By Lemma 7, system (41) has a positive periodic solution
]∗ (𝑡), and for any solution ](𝑡) of (41), ](𝑡) → ]∗ (𝑡) as 𝑡 large
enough, where ]∗ (𝑡) = 𝑥∗ (𝑡). Then, according to Lemmas
4 and 7, there exists a positive constant 𝑛∗ such that for all
𝑡 ≥ 𝑛∗ 𝑇
we can choose an 𝜀 small enough such that
𝑇
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇,
𝑉 (𝑡) ≥ (
−𝑑𝐼 𝐼 (𝑡)
−𝑑
0
)=( 𝐼
) 𝑉 (𝑡) ,
− (𝑑𝐽 + 𝑚) 𝑦𝐽 (𝑡)
0 − (𝑑𝐽 + 𝑚)
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇, 𝑡 ≠ 𝑛𝑇,
(43)
0
1 − 𝑃𝐼
) 𝑉 ((𝑛 + 𝜏 − 1) 𝑇) ,
𝑉 ((𝑛 + 𝜏 − 1) 𝑇+ ) = (
0
1 − 𝑃𝐽
𝛿
1 0
𝑉 (𝑛𝑇+ ) = (
) 𝑉 (𝑛𝑇) + ( 𝐼 ) ,
𝛿𝐽
0 1
𝑉 (0+ ) = (𝐼 (0+ ) , 𝑦𝐽 (0+ )) .
(44)
Abstract and Applied Analysis
9
Then, the multicomparison system of (43) is
𝑤 (𝑡) = 𝐴𝑤 (𝑡) ,
Therefore,
𝑆 (𝑡) ≤ [𝛽𝑃1 (𝑥∗ (𝑡) + 𝜀) − 𝑔 (𝐼∗ (𝑡) − 𝜀)
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇,
𝑤 (𝑡+ ) = 𝐵𝑤 (𝑡) ,
𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
+
𝑤 (𝑡 ) = 𝐼2 𝑤 (𝑡) + 𝐶,
∗
− min 𝑃2 (𝜛) (𝑦𝑀
(𝑡) − 𝜀) − 𝑑𝑆 ] 𝑆 (𝑡) ,
(45)
𝑡 = 𝑛𝑇,
0≤𝜛≤𝑈𝑆
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇,
𝑤 (0+ ) = 𝑉 (0+ ) ,
−𝑑
0
1−𝑃
0
𝑡 ≠ 𝑛𝑇,
𝛿
where 𝐴 = ( 0 𝐼 −(𝑑𝐽 +𝑚) ) , 𝐵 = ( 0 𝐼 1−𝑃𝐽 ), and 𝐶 = ( 𝛿𝐽𝐼 ).
By Lemma 9, it is easy to obtain a periodic solution
(𝐼∗ (𝑡), 𝑦𝐽∗ (𝑡))𝑇 of system (45). Then, according to Lemmas 4
and 9, one may find 𝑛0∗ (𝑛0∗ > 𝑛∗ ) such that for all 𝑡 ≥ 𝑛0∗ 𝑇
∗
𝐼 (𝑡) ≥ 𝐼 (𝑡) − 𝜀,
𝑦𝐽 (𝑡) ≥
𝑦𝐽∗
(𝑡) − 𝜀.
(46)
(𝑡) ≥
From the fourth equation of system (40), we have 𝑦𝑀
∗
𝑚(𝑦𝐽 (𝑡) − 𝜀) − 𝑑𝑀𝑦𝑀(𝑡), by Lemmas 4 and 9, there exists
𝑛1∗ (𝑛1∗ > 𝑛0∗ ) such that for all 𝑡 ≥ 𝑛1∗ 𝑇
∗ (𝑡) − 𝜀,
𝑦𝑀 (𝑡) ≥ 𝑦𝑀
(50)
(47)
where
Δ𝑆 (𝑡) = −𝑃𝑆 𝑆 (𝑡) ,
Δ𝑆 (𝑡) = 0,
𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
𝑡 = 𝑛𝑇,
for 𝑡 ≥ 𝑛1∗ 𝑇. Let 𝑁 ∈ N and (𝑁 + 𝜏 − 1) ≥ 𝑛1∗ . Integrating (50)
on ((𝑛 + 𝜏 − 1)𝑇, (𝑛 + 𝜏)𝑇], 𝑛 ≥ 𝑁, we have
𝑆 ((𝑛 + 𝜏) 𝑇)
≤ 𝑆 ((𝑛 + 𝜏 − 1) 𝑇) (1 − 𝑃𝑆 )
(𝑛+𝜏)𝑇
∗
∗ (𝑡)−𝜀)−𝑔(𝐼̃
∗ (𝑡)+𝜀)− min 𝑃 (𝜛)(𝑦
̃
̃
∫(𝑛+𝜏−1)𝑇 (𝛽𝑃1 (𝑥
2
𝑀 (𝑡)+𝜀)−𝑑𝑆 )𝑑𝑡
×𝑒
0≤𝜛≤𝑈𝑆
= 𝑆 ((𝑛 + 𝜏 − 1) 𝑇) 𝑒𝜖 .
−𝑑𝑀 (𝑡−(𝑛−1)𝑇)
𝑒
{
{
{
∗ (0+ )
{
× (𝑦𝑀
{
{
{
𝑡−(𝑛−1)𝑇
{
{
{
{ +𝑚 ∫
(𝑦𝐽∗ (𝑡) − 𝜀) 𝑒𝑑𝑀 𝑠 𝑑𝑠) ,
{
{
{
0
{
{
{
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
∗
𝑦𝑀
(𝑡) = { −𝑑𝑀 (𝑡−(𝑛−1)𝑇)
{𝑒
{
{
{
{× (𝑦∗ (𝜏𝑇+ )𝑒𝑑𝑀 𝜏𝑇
{
{
𝑀
{
{
𝑡−(𝑛−1)𝑇
{
{
{
+𝑚 ∫
(𝑦𝐽∗ (𝑡) − 𝜀) 𝑒𝑑𝑀 𝑠 𝑑𝑠) ,
{
{
{
𝜏𝑇
{
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] ,
{
∗ (0+ ) = (𝑚 [(1 − 𝑃 ) ∫
𝑦𝑀
𝑀
𝜏𝑇
0
(51)
(48)
𝑥 (𝑡) ≥ (𝑟 − 𝑃1 (0) 𝜀0 ) 𝑥 (𝑡) (1 −
(𝑦𝐽∗ (𝑡) − 𝜀) 𝑒𝑑𝑀 𝑠 𝑑𝑠
𝑟𝑥 (𝑡)
),
𝐾 (𝑟 − 𝑃1 (0) 𝜀0 )
𝐼 (𝑡) ≤ − (𝑑𝐼 − 𝑔 (0) 𝜀0 ) 𝐼 (𝑡) ,
𝑇
+ ∫ (𝑦𝐽∗ (𝑡) − 𝜀) 𝑒𝑑𝑀 𝑠 𝑑𝑠] 𝑒−𝑑𝑀 𝑇 + 𝛿𝑀)
𝜏𝑇
−𝑑𝑀 𝑇 −1
× (1 − (1 − 𝑃𝑀) 𝑒
Then 𝑆(𝑡) ≤ 𝑆((𝑛+𝜏)𝑇)𝑒𝑘𝜖 for 𝑡 ∈ ((𝑛+𝜏+𝑘)𝑇, (𝑛+𝜏+𝑘+1)𝑇].
Since 𝜖 < 0, we can easily get 𝑆(𝑡) → 0, as 𝑡 → ∞. In the
following, we prove 𝑥(𝑡) → 𝑥∗ (𝑡), 𝐼(𝑡) → 𝐼∗ (𝑡), 𝑦𝐽 (𝑡) →
∗
(𝑡), as 𝑡 → ∞. Give 𝜀0 > 0 small enough
𝑦𝐽∗ (𝑡), 𝑦𝑀(𝑡) → 𝑦𝑀
(𝜀0 < (𝑟/𝑃 1 (0))), there must exist 𝑛2∗ (𝑛2∗ > 𝑛1∗ ) such that
𝑆(𝑡) < 𝜀0 , for 𝑡 ≥ 𝑛2∗ 𝑇. Then, we have
) ,
𝑦𝐽 (𝑡) ≤ 𝜆𝑃2 (𝜀0 ) 𝑀 − (𝑑𝐽 + 𝑚) 𝑦𝐽 (𝑡) ,
𝑦𝑀
(𝑡) = 𝑚𝑦𝐽 (𝑡) − 𝑑𝑀𝑦𝑀 (𝑡) ,
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇,
∗ (𝜏𝑇+ )
𝑦𝑀
𝑡 ≠ 𝑛𝑇,
= ((1 − 𝑃𝑀) [𝑚 ∫
𝜏𝑇
0
Δ𝑥 (𝑡) = −𝛿𝑥 (𝑡) ,
(𝑦𝐽∗ (𝑡) − 𝜀) 𝑒𝑑𝑀 𝑠 𝑑𝑠
Δ𝐼 (𝑡) = −𝑃𝐼 𝐼 (𝑡) ,
𝑇
+ 𝑚𝑒−𝑑𝑀 𝑇 ∫ (𝑦𝐽∗ (𝑡) − 𝜀) 𝑒𝑑𝑀 𝑠 𝑑𝑠 + 𝛿𝑀]
𝜏𝑇
Δ𝑦𝐽 (𝑡) = −𝑃𝐽 𝑦𝐽 (𝑡) ,
Δ𝑦𝑀 (𝑡) = −𝑃𝑀𝑦𝑀 (𝑡) ,
× 𝑒−𝑑𝑀 𝜏𝑇 )
𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
−1
Δ𝑥 (𝑡) = 0,
× (1 − (1 − 𝑃𝑀) 𝑒−𝑑𝑀 𝑇 ) .
(49)
Δ𝐼 (𝑡) = 𝛿𝐼 ,
10
Abstract and Applied Analysis
∗
+
𝑦̂
𝐽 (𝜏𝑇 )
Δ𝑦𝐽 (𝑡) = 𝛿𝐽 ,
Δ𝑦𝑀 (𝑡) = 𝛿𝑀,
𝜏𝑇
= ((1 − 𝑃𝐽 ) [𝜆𝑃2 (𝜀0 ) 𝑀 ∫
0
𝑡 = 𝑛𝑇.
𝑇
(52)
Analyzing (52) with similarity as (40), there exists 𝑛3∗ (𝑛3∗ >
𝑛2∗ ) such that for all 𝑡 ≥ 𝑛3∗ 𝑇
∗ (𝑡) − 𝜀,
̂
𝑥 (𝑡) ≥ 𝑥
∗ (𝑡) + 𝜀,
𝐼 (𝑡) ≤ 𝐼̂
∗
̂
𝑦𝐽 (𝑡) ≤ 𝑦
𝐽 (𝑡) + 𝜀,
∗
𝑦𝑀 (𝑡) ≤ 𝑦̂
𝑀 (𝑡) + 𝜀,
(53)
where
∗ (𝑡)
̂
𝑥
𝐾 (𝑟 − 𝑃1 (0) 𝜀0 ) (1 − 𝛿 − 𝑒−(𝑟−𝑃1 (0)𝜀0 )𝑇 )
{
{
{
{
{
× (𝑟 [1 − 𝛿 − 𝑒−(𝑟−𝑃1 (0)𝜀0 )𝑇
{
{
{
{
−1
{
{
{
+𝛿𝑒−(𝑟−𝑃1 (0)𝜀0 )(𝑇−𝜏𝑇) 𝑒−(𝑟−𝑃1 (0)𝜀0 )(𝑡−(𝑛−1)𝑇) ]) ,
{
{
={
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
{
{
{
−(𝑟−𝑃1 (0)𝜀0 )𝑇
{
𝐾
(𝑟
−
𝑃
)
)
𝜀
(0)
{
0 (1 − 𝛿 − 𝑒
1
{
{
{
,
{
{
−(𝑟−𝑃1 (0)𝜀0 )𝑇 + 𝛿𝑒−(𝑟−𝑃1 (0)𝜀0 )(𝑡−(𝑛+𝜏−1)𝑇) ]
{
{
{ 𝑟 [1 − 𝛿 − 𝑒
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] ,
{
∗ (𝑡)
𝐼̂
+𝑒−(𝑚+𝑑𝐽 )𝑇 𝜆𝑃2 (𝜀0 ) 𝑀 ∫ 𝑒(𝑚+𝑑𝐽 )𝑠 𝑑𝑠 + 𝛿𝐽 ]
𝜏𝑇
−1
×𝑒−(𝑚+𝑑𝐽 )𝜏𝑇 ) (1 − (1 − 𝑃𝐽 )𝑒−(𝑚+𝑑𝐽 )𝑇 ) ,
∗
𝑦̂
𝑀 (𝑡)
−𝑑𝑀 (𝑡−(𝑛−1)𝑇)
𝑒
{
{
{
{
∗
+
{
× (𝑦̂
{
𝑀 (0 )
{
{
{
𝑡−(𝑛−1)𝑇
{
{
𝑑𝑀 𝑠
∗
{
(𝑦̂
𝑑𝑠) ,
+
𝑚
∫
{
𝐽 (𝑡) + 𝜀) 𝑒
{
{
0
{
{
{
{
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
= { −𝑑𝑀 (𝑡−(𝑛−1)𝑇)
{
𝑒
{
{
{
{
∗̂+ 𝑑𝑀 𝜏𝑇
{ × (𝑦𝑀
(𝜏𝑇 )𝑒
{
{
{
{
𝑡−(𝑛−1)𝑇
{
{
𝑑𝑀 𝑠
∗
{
+𝑚 ∫
(𝑦̂
𝑑𝑠) ,
{
𝐽 (𝑡) + 𝜀) 𝑒
{
{
𝜏𝑇
{
{
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] ,
{
∗
+
𝑦̂
𝑀 (0 )
= (𝑚 [(1 − 𝑃𝑀) ∫
𝜏𝑇
0
𝑇
𝛿𝐼 𝑒
{
{
,
{
{
{
1 − (1 − 𝑃𝐼 ) 𝑒−(𝑑𝐼 −𝑔 (0)𝜀0 )𝑇
{
{
{
{
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
={
−(𝑑𝐼 −𝑔 (0)𝜀0 )(𝑡−(𝑛−1)𝑇)
{
𝛿
(1
−
𝑃
{
𝐼
𝐼) 𝑒
{
{
,
{
{ 1 − (1 − 𝑃𝐼 ) 𝑒−(𝑑𝐼 −𝑔 (0)𝜀0 )𝑇
{
{
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] ,
{
𝜏𝑇
−1
× (1 − (1 − 𝑃𝑀)𝑒−𝑑𝑀 𝑇 ) ,
∗
̂
(𝜏𝑇+ )
𝑦𝑀
= ( (1 − 𝑃𝑀)
∗
̂
𝑦
𝐽 (𝑡)
𝜏𝑇
−(𝑚+𝑑𝐽 )(𝑡−(𝑛−1)𝑇)
𝑒
{
{
𝑡−(𝑛−1)𝑇 (𝑚+𝑑 )𝑠
{
∗ +
{
𝐽
{
× (𝑦̂
𝑒
𝑑𝑠) ,
{
𝐽 (0 ) + 𝜆𝑃2 (𝜀0 ) 𝑀 ∫0
{
{
{
{
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
{
{
{
{𝑒−(𝑚+𝑑𝐽 )(𝑡−(𝑛−1)𝑇)
={
{
̂
{
{
× (𝑦𝐽∗ (𝜏𝑇+ )𝑒(𝑚+𝑑𝐽 )𝜏𝑇
{
{
{
{
{
𝑡−(𝑛−1)𝑇 (𝑚+𝑑 )𝑠
{
𝐽
{
+𝜆𝑃2 (𝜀0 ) 𝑀 ∫𝜏𝑇
𝑒
𝑑𝑠) ,
{
{
{
𝑡
∈
+
𝜏
−
1)
𝑇,
𝑛𝑇] ,
((𝑛
{
∗ +
𝑦̂
𝐽 (0 )
𝜏𝑇
0
𝑑𝑀 𝑠
∗
̂
(𝑦
𝑑𝑠
𝐽 (𝑡) + 𝜀) 𝑒
𝑑𝑀 𝑠
∗
̃
𝑑𝑠] 𝑒−𝑑𝑀 𝑇 + 𝛿𝑀)
+ ∫ (𝑦
𝐽 (𝑡) + 𝜀) 𝑒
−(𝑑𝐼 −𝑔 (0)𝜀0 )(𝑡−(𝑛−1)𝑇)
= (𝜆𝑃2 (𝜀0 ) 𝑀 [(1 − 𝑃𝐽 ) ∫
𝑒(𝑚+𝑑𝐽 )𝑠 𝑑𝑠
𝑇
𝑒(𝑚+𝑑𝐽 )𝑠 𝑑𝑠 + ∫ 𝑒(𝑚+𝑑𝐽 )𝑠 𝑑𝑠]
𝜏𝑇
−1
× 𝑒−(𝑚+𝑑𝐽 )𝑇 + 𝛿𝐽 ) (1 − (1 − 𝑃𝐽 )𝑒−(𝑚+𝑑𝐽 )𝑇 ) ,
× [𝑚 ∫
0
𝑑𝑀 𝑠
∗
(𝑦̂
𝑑𝑠 + 𝑚𝑒−𝑑𝑀 𝑇
𝐽 (𝑡) + 𝜀) 𝑒
𝑇
𝑑𝑀 𝑠
∗
̃
× ∫ (𝑦
𝑑𝑠 + 𝛿𝑀] 𝑒−𝑑𝑀 𝜏𝑇 )
𝐽 (𝑡) + 𝜀) 𝑒
𝜏𝑇
−1
× (1 − (1 − 𝑃𝑀)𝑒−𝑑𝑀 𝑇 ) .
(54)
∗ (𝑡) → 𝑦∗ (𝑡), 𝑥
∗ (𝑡) → 𝑥∗ (𝑡),
̂
Letting 𝜀, 𝜀0 → 0, we have 𝑦𝑀
𝑀
∗
∗
∗
∗
∗ (𝑡) → 𝐼∗ (𝑡), 𝑦
̂
̂
𝐼̂
𝐽 (𝑡) → 𝑦𝐽 (𝑡), 𝑦𝑀 (𝑡) → 𝑦𝑀 (𝑡). Together
with (42), (46), (47), and (53), we get 𝑥(𝑡) → 𝑥∗ (𝑡), 𝐼(𝑡) →
∗
(𝑡) as 𝑡 → ∞.
𝐼∗ (𝑡), 𝑦𝐽 (𝑡) → 𝑦𝐽∗ (𝑡), 𝑦𝑀(𝑡) → 𝑦𝑀
Therefore, the susceptible pest-eradication periodic solution
∗
(𝑡)) is globally attractive. Since (37)
(𝑥∗ (𝑡), 0, 𝐼∗ (𝑡), 𝑦𝐽∗ (𝑡), 𝑦𝑀
implies (30), it follows from Theorem 11 that (𝑥∗ (𝑡), 0, 𝐼∗ (𝑡),
Abstract and Applied Analysis
11
𝑦𝐽∗ (𝑡)) is locally asymptotically stable. So, the susceptible pest∗
eradication periodic solution (𝑥∗ (𝑡), 0, 𝐼∗ (𝑡), 𝑦𝐽∗ (𝑡), 𝑦𝑀
(𝑡)) of
system (1) is globally asymptotically stable. The proof is
completed.
4.2. Permanence. Next, we will discuss the permanence of
system (1). In order to facilitate discussion, we give one
lemma.
Lemma 13. There exists a constant 𝑚4 > 0, such that 𝑥(𝑡),
𝐼(𝑡), 𝑦𝐽 (𝑡), 𝑦𝑀(𝑡) ≥ 𝑚4 for each solution of (1) with 𝑡 large
enough.
so 𝑥(𝑡) ≥ 𝑚0 for 𝑡 ≥ 𝑛4∗ 𝑇. Next, we will discuss the rest of
parts.
From (46) and (47), we know that there exists 𝑛5∗ (𝑛5∗ >
max{𝑛1∗ , 𝑛4∗ }) such that 𝐼(𝑡) ≥ 𝐼∗ (𝑡) − 𝜀, 𝑦𝐽 (𝑡) ≥ 𝑦𝐽∗ (𝑡) − 𝜀, and
∗ (𝑡) − 𝜀 for all 𝑡 ≥ 𝑛∗ 𝑇. By (22), (23), and (48), we
𝑦𝑀(𝑡) ≥ 𝑦𝑀
5
have 𝐼(𝑡) ≥ (𝛿𝐼 (1 − 𝑃𝐼 )𝑒−𝑑𝐼 𝑇 /(1 − (1 − 𝑃𝐼 )𝑒−𝑑𝐼 𝑇 )) − 𝜀 = 𝑚1 > 0,
𝑦𝐽 (𝑡) ≥ (𝛿𝐽 (1 − 𝑃𝐽 )𝑒−(𝑚+𝑑𝐽 )𝑇 /(1 − (1 − 𝑃𝐽 )𝑒−(𝑚+𝑑𝐽 )𝑇 )) − 𝜀 = 𝑚2 >
∗ (𝑡).
0, and 𝑦𝑀(𝑡) ≥ 𝑚𝑀 −𝜀 = 𝑚3 > 0, where 𝑚𝑀 = min0<𝑡≤𝑇 𝑦𝑀
Let 𝑚4 = min{𝑚0 , 𝑚1 , 𝑚2 , 𝑚3 }, then 𝑥(𝑡), 𝐼(𝑡), 𝑦𝐽 (𝑡), 𝑦𝑀(𝑡) ≥
𝑚4 for 𝑡 ≥ 𝑛5∗ 𝑇. The proof is completed.
Theorem 14. If
Proof . First, we discuss 𝑥(𝑡). Since 𝑆(𝑡) ≤ 𝑀, by the first
equation of system (1), we have
𝑥 (𝑡) ≥ (𝑟 − 𝑃1 (0) 𝑀) 𝑥 (𝑡) (1 −
Δ𝑥 (𝑡) = 0,
𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
𝑡 = 𝑛𝑇.
(55)
Then, we obtain the following comparison system:
𝜒 (𝑡) = (𝑟 − 𝑃1 (0) 𝑀) 𝜒 (𝑡) (1 −
𝑟𝜒 (𝑡)
),
𝐾 (𝑟 − 𝑃1 (0) 𝑀)
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇, 𝑡 ≠ 𝑛𝑇,
Δ𝜒 (𝑡) = −𝛿𝜒 (𝑡) ,
Δ𝜒 (𝑡) = 0,
𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
×∫
0
1
− 𝑑𝑆 𝑇 > ln
,
1 − 𝑃𝑆
∗
𝑦𝑀
(𝑡) 𝑑𝑡
(𝑟−𝑃1 (0)𝑀)𝑇
and (1 − 𝛿)𝑒
> 1, by Lemma 7,
Letting 𝑟 >
the system (56) has a positive periodic solution 𝜒∗ (𝑡), and for
any solution 𝜒(𝑡) of (56), 𝜒(𝑡) → 𝜒∗ (𝑡) as 𝑡 large enough,
where
(57)
According to Lemmas 4 and 7, one may find 𝑛4∗ ∈ N such
that 𝑥(𝑡) ≥ 𝜒∗ (𝑡) − 𝜀 for 𝑡 ≥ 𝑛4∗ 𝑇. Since 𝜒∗ (𝑡) − 𝜀 ≥ (𝐾(𝑟 −
𝑃1 (0)𝑀)(1−𝛿−𝑒−(𝑟−𝑃1 (0)𝑀)𝑇 )/𝑟(1−𝑒−(𝑟−𝑃1 (0)𝑀)𝑇 ))−𝜀 = 𝑚0 > 0,
(58)
then system (1) is permanent.
Proof. By Lemmas 6 and 13, we have already known
that there exist two constants 𝑚4 , 𝑀 > 0, such that
𝑥(𝑡), 𝐼(𝑡), 𝑦𝐽 (𝑡), 𝑦𝑀(𝑡) ≥ 𝑚4 and 𝑥(𝑡), 𝑆(𝑡), 𝐼(𝑡), 𝑦𝐽 (𝑡), 𝑦𝑀(𝑡) ≤
𝑀 for 𝑡 large enough. Thus, we only need to find 𝑚∗ > 0
such that 𝑆(𝑡) ≥ 𝑚∗ for 𝑡 large enough. We will do this in the
following two steps.
Step 1. Let 𝑚5 > 0 and 𝜀1 > 0 small enough, so that 𝑚5 <
min{(𝑟/𝑃1 (0)), (𝑑𝐼 /𝑔 (0)), 𝑀} and
𝑇
𝑇
0
0
∗ (𝑡) − 𝜀 ) 𝑑𝑡 − ∫ 𝑔 (𝐼̃
∗ (𝑡) + 𝜀 ) 𝑑𝑡 − 𝑃 (0)
̃
𝛽 ∫ 𝑃1 (𝑥
1
1
2
1
∗
× ∫ (𝑦̃
= 𝜂 > 0,
𝑀 (𝑡) + 𝜀1 ) 𝑑𝑡 − 𝑑𝑆 𝑇 − ln
1 − 𝑃𝑆
0
𝑡 = 𝑛𝑇.
𝐾 (𝑟 − 𝑃1 (0) 𝑀) (1 − 𝛿 − 𝑒−(𝑟−𝑃1 (0)𝑀)𝑇 )
{
{
{
{
{
{
× (𝑟 [1 − 𝛿 − 𝑒−(𝑟−𝑃1 (0)𝑀)𝑇
{
{
{
{
{
+ 𝛿𝑒−(𝑟−𝑃1 (0)𝑀)(𝑇−𝜏𝑇)
{
{
{
−1
{
{
{
× 𝑒−(𝑟−𝑃1 (0)𝑀)(𝑡−(𝑛−1)𝑇) ]) ,
{
{
𝜒∗ (𝑡) = {
𝑡 ∈ ((𝑛−1) 𝑇, (𝑛+𝜏 − 1)𝑇] ,
{
{
{
{
𝐾 (𝑟 − 𝑃1 (0) 𝑀) (1 − 𝛿 − 𝑒−(𝑟−𝑃1 (0)𝑀)𝑇 )
{
{
{
{
{
× (𝑟 [1 − 𝛿 − 𝑒−(𝑟−𝑃1 (0)𝑀)𝑇
{
{
{
{
−1
{
{
{
+𝛿𝑒−(𝑟−𝑃1 (0)𝑀)(𝑡−(𝑛+𝜏−1)𝑇) ]) ,
{
{
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] .
{
0
𝑇
𝑇
(56)
𝑃1 (0)𝑀
𝑇
0
𝑟𝑥 (𝑡)
),
𝐾 (𝑟 − 𝑃1 (0) 𝑀)
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇, 𝑡 ≠ 𝑛𝑇,
Δ𝑥 (𝑡) = −𝛿𝑥 (𝑡) ,
𝑇
𝛽 ∫ 𝑃1 (𝑥∗ (𝑡)) 𝑑𝑡 − ∫ 𝑔 (𝐼∗ (𝑡)) 𝑑𝑡 − 𝑃2 (0)
where
𝐾 (𝑟 − 𝑃1 (0) 𝑚5 ) (1 − 𝛿 − 𝑒−(𝑟−𝑃1 (0)𝑚5 )𝑇 )
{
{
{
{
{
{ × (𝑟 [1 − 𝛿 − 𝑒−(𝑟−𝑃 1 (0)𝑚5 )𝑇
{
{
{
{
{
{
+𝛿𝑒−(𝑟−𝑃1 (0)𝑚5 )(𝑇−𝜏𝑇)
{
{
{
−1
{
{
{
× 𝑒−(𝑟−𝑃1 (0)𝑚5 )(𝑡−(𝑛−1)𝑇)]) ,
{
{
{
∗ (𝑡) =
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
𝑥̃
{
{
{
{
−(𝑟−𝑃1 (0)𝑚5 )𝑇
{
)
{
{𝐾 (𝑟 − 𝑃1 (0) 𝑚5 ) (1 − 𝛿 − 𝑒
{
{
{
−(𝑟−𝑃
(0)𝑚
)𝑇
5
1
{
× (𝑟 [1 − 𝛿 − 𝑒
{
{
{
{
−1
{
{
{
+𝛿𝑒−(𝑟−𝑃1 (0)𝑚5 )(𝑡−(𝑛+𝜏−1)𝑇) ]) ,
{
{
{
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] ,
{
𝛿𝐼 𝑒−(𝑑𝐼 −𝑔 (0)𝑚5 )(𝑡−(𝑛−1)𝑇)
{
{
,
{
{
{
1 − (1 − 𝑃𝐼 ) 𝑒−(𝑑𝐼 −𝑔 (0)𝑚5 )𝑇
{
{
{
{
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
{
∗ (𝑡) =
𝐼̃
{
{
{ 𝛿𝐼 (1 − 𝑃𝐼 ) 𝑒−(𝑑𝐼 −𝑔 (0)𝑚5 )(𝑡−(𝑛−1)𝑇)
{
{
{
{ 1 − (1 − 𝑃 ) 𝑒−(𝑑𝐼 −𝑔 (0)𝑚5 )𝑇 ,
{
{
𝐼
{
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] ,
{
(59)
12
Abstract and Applied Analysis
∗
𝑦̃
𝐽 (𝑡)
−1
×𝑒−𝑑𝑀 𝑇 + 𝛿𝑀) (1 − (1 − 𝑃𝑀) 𝑒−𝑑𝑀 𝑇 ) ,
−(𝑚+𝑑𝐽 )(𝑡−(𝑛−1)𝑇)
𝑒
{
{
𝑡−(𝑛−1)𝑇
{
{
{
∗ +
{
× (𝑦̃
𝑒(𝑚+𝑑𝐽 )𝑠 𝑑𝑠) ,
{
𝐽 (0 ) + 𝜆𝑃2 (𝑚5 ) 𝑀 ∫
{
{
0
{
{
{
{
{
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
{
{
{
{𝑒−(𝑚+𝑑𝐽 )(𝑡−(𝑛−1)𝑇)
={
{
{
{
× (𝑦𝐽∗̃
(𝜏𝑇+ )𝑒(𝑚+𝑑𝐽 )𝜏𝑇
{
{
{
{
𝑡−(𝑛−1)𝑇
{
{
{
{
+𝜆𝑃
(𝑚
)
𝑀
𝑒(𝑚+𝑑𝐽 )𝑠 𝑑𝑠) ,
∫
{
2
5
{
{
𝜏𝑇
{
{
{
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] ,
{
∗̃+
𝑦𝑀
(𝜏𝑇 )
= ( (1 − 𝑃𝑀)
× [𝑚 ∫
0
= (𝜆𝑃2 (𝑚5 ) 𝑀[(1 − 𝑃𝐽 )∫
0
(𝑚+𝑑𝐽 )𝑠
𝑒
𝑑𝑀 𝑠
∗
(𝑦̃
𝑑𝑠
𝐽 (𝑡) + 𝜀1 ) 𝑒
𝑇
𝑑𝑀 𝑠
∗
𝑑𝑠 + 𝛿𝑀]
+ 𝑚𝑒−𝑑𝑀 𝑇 ∫ (𝑦̃
𝐽 (𝑡) + 𝜀1 ) 𝑒
𝜏𝑇
−1
×𝑒−𝑑𝑀 𝜏𝑇 ) (1 − (1 − 𝑃𝑀) 𝑒−𝑑𝑀 𝑇 ) .
∗ +
𝑦̃
𝐽 (0 )
𝜏𝑇
𝜏𝑇
(60)
𝑇
(𝑚+𝑑𝐽 )𝑠
𝑑𝑠 +∫ 𝑒
𝜏𝑇
−1
× 𝑒−(𝑚+𝑑𝐽 )𝑇 + 𝛿𝐽 ) (1 − (1 − 𝑃𝐽 )𝑒−(𝑚+𝑑𝐽 )𝑇 ) ,
𝑦𝐽∗̃
(𝜏𝑇+ )
𝑑𝑠]
We shall prove that one cannot have 𝑆(𝑡) < 𝑚5 for all 𝑡 > 0,
otherwise
𝑥 (𝑡) ≥ (𝑟 − 𝑃1 (0) 𝑚5 ) 𝑥 (𝑡) (1 −
𝑟𝑥 (𝑡)
),
𝐾 (𝑟 − 𝑃1 (0) 𝑚5 )
𝐼 (𝑡) ≤ − (𝑑𝐼 − 𝑔 (0) 𝑚5 ) 𝐼 (𝑡) ,
= ( (1 − 𝑃𝐽 )
𝑦𝐽 (𝑡) ≤ 𝜆𝑃2 (𝑚5 ) 𝑀 − (𝑑𝐽 + 𝑚) 𝑦𝐽 (𝑡) ,
× [𝜆𝑃2 (𝑚5 ) 𝑀 ∫
𝜏𝑇
0
𝑒(𝑚+𝑑𝐽 )𝑠 𝑑𝑠 + 𝑒−(𝑚+𝑑𝐽 )𝑇
𝑇
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇,
(𝑚+𝑑𝐽 )𝑠
× 𝜆𝑃2 (𝑚5 ) 𝑀 ∫ 𝑒
𝜏𝑇
𝑦𝑀
(𝑡) = 𝑚𝑦𝐽 (𝑡) − 𝑑𝑀𝑦𝑀 (𝑡) ,
𝑑𝑠 + 𝛿𝐽 ]
−1
×𝑒−(𝑚+𝑑𝐽 )𝜏𝑇 ) (1 − (1 − 𝑃𝐽 )𝑒−(𝑚+𝑑𝐽 )𝑇 ) ,
∗
̃
𝑦
𝑀 (𝑡)
𝑡 ≠ 𝑛𝑇,
Δ𝑥 (𝑡) = −𝛿𝑥 (𝑡) ,
Δ𝐼 (𝑡) = −𝑃𝐼 𝐼 (𝑡) ,
(61)
Δ𝑦𝐽 (𝑡) = −𝑃𝐽 𝑦𝐽 (𝑡) ,
−𝑑𝑀 (𝑡−(𝑛−1)𝑇)
𝑒
{
{
{
𝑡−(𝑛−1)𝑇
{
{
{
∗
+) + 𝑚 ∫
̃
{
×
(
𝑦
(0
{
𝑀
{
{
0
{
{
{
{
𝑑𝑀 𝑠
∗
{
× (𝑦̃
𝑑𝑠) ,
{
𝐽 (𝑡) + 𝜀1 ) 𝑒
{
{
{
{
{
{
𝑡 ∈ ((𝑛 − 1) 𝑇, (𝑛 + 𝜏 − 1) 𝑇] ,
={
−𝑑
(𝑡−(𝑛−1)𝑇)
{𝑒 𝑀
{
{
{
{
∗
{
̃
× (𝑦𝑀
(𝜏𝑇+ )𝑒𝑑𝑀 𝜏𝑇
{
{
{
{
{
𝑡−(𝑛−1)𝑇
{
{
𝑑𝑀 𝑠
{
∗
̃
{
+
𝑚
(𝑦
𝑑𝑠) ,
∫
{
𝐽 (𝑡) + 𝜀1 ) 𝑒
{
{
𝜏𝑇
{
{
{
𝑡 ∈ ((𝑛 + 𝜏 − 1) 𝑇, 𝑛𝑇] ,
{
∗
+
𝑦̃
𝑀 (0 )
𝜏𝑇
= (𝑚 [(1 − 𝑃𝑀) ∫
0
𝑇
𝑑𝑀 𝑠
∗
(𝑦̃
𝑑𝑠
𝐽 (𝑡) + 𝜀1 ) 𝑒
𝑑𝑀 𝑠
∗
𝑑𝑠]
+ ∫ (𝑦̃
𝐽 (𝑡) + 𝜀1 ) 𝑒
𝜏𝑇
Δ𝑦𝑀 (𝑡) = −𝑃𝑀𝑦𝑀 (𝑡) ,
𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
Δ𝑥 (𝑡) = 0,
Δ𝐼 (𝑡) = 𝛿𝐼 ,
Δ𝑦𝐽 (𝑡) = 𝛿𝐽 ,
Δ𝑦𝑀 (𝑡) = 𝛿𝑀,
𝑡 = 𝑛𝑇.
Analyzing (61) with similarity as (40), it is easy to obtain that
∗ (𝑡) −
̃
there exists a positive constant 𝑛6∗ , such that 𝑥(𝑡) ≥ 𝑥
∗
∗
∗
̃
̃
(𝑡) + 𝜀1 , 𝑦𝐽 (𝑡) ≤ 𝑦
𝜀1 , 𝐼(𝑡) ≤ 𝐼̃
𝐽 (𝑡) + 𝜀1 , 𝑦𝑀 (𝑡) ≤ 𝑦𝑀 (𝑡) + 𝜀1 for
𝑡 ≥ 𝑛6∗ 𝑇. Therefore,
∗ (𝑡) − 𝜀 ) 𝑆 (𝑡) − 𝑔 (𝐼̃
∗ (𝑡) + 𝜀 ) 𝑆 (𝑡)
̃
𝑆 (𝑡) ≥ 𝛽𝑃1 (𝑥
1
1
∗
− 𝑃2 (0) (𝑦̃
𝑀 (𝑡) + 𝜀1 ) 𝑆 (𝑡) − 𝑑𝑆 𝑆 (𝑡) ,
Abstract and Applied Analysis
13
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇, 𝑡 ≠ 𝑛𝑇,
Δ𝑆 (𝑡) = −𝑃𝑆 𝑆 (𝑡) , 𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
Δ𝑆 (𝑡) = 0, 𝑡 = 𝑛𝑇,
𝑛6∗ 𝑇.
for 𝑡 ∈ [𝑡2 , 𝑡2 +𝑛2 𝑇]. Integrating (66) on [𝑡2 , 𝑡2 +𝑛2 𝑇], we have
𝑆 (𝑡2 + 𝑛2 𝑇) ≥ 𝑆 (𝑡2+ ) 𝑒𝑛2 𝜎𝑇
= (1 − 𝑃𝑆 ) 𝑚5 𝑒𝑛2 𝜎𝑇
(62)
𝑛6∗ .
for 𝑡 ≥
Let 𝑁0 ∈ N and (𝑁0 + 𝜏 − 1) ≥
Integrating
(62) on ((𝑛 + 𝜏 − 1)𝑇, (𝑛 + 𝜏)𝑇], 𝑛 ≥ 𝑁0 , we have
𝑆 ((𝑛 + 𝜏) 𝑇)
≥ 𝑆 ((𝑛 + 𝜏 − 1) 𝑇) (1 − 𝑃𝑆 )
(𝑛+𝜏)𝑇
∗
∗ (𝑡)−𝜀 )−𝑔(𝐼̃
∗ (𝑡)+𝜀 )−𝑃 (0)(𝑦
̃
̃
1
1
2
𝑀 (𝑡)+𝜀1 )−𝑑𝑆 )𝑑𝑡
× 𝑒∫(𝑛+𝜏−1)𝑇 (𝛽𝑃1 (𝑥
(63)
= 𝑆 ((𝑛 + 𝜏 − 1) 𝑇) 𝑒𝜂 .
Then 𝑆((𝑁0 + 𝜏 + 𝑘)𝑇) ≥ 𝑆((𝑁0 + 𝜏)𝑇)𝑒𝑘𝜂 → ∞ as 𝑘 → ∞,
which is a contradiction. So there exists a 𝑡1 (𝑡1 > 𝑛6∗ 𝑇) such
that 𝑆(𝑡1 ) ≥ 𝑚5 .
Step 2. If 𝑆(𝑡) ≥ 𝑚5 for all 𝑡 ≥ 𝑡1 , then Our purpose is
obtained. If not, let 𝑡2 = inf{𝑡 > 𝑡1 | 𝑆(𝑡) < 𝑚5 }. Then
𝑆(𝑡) ≥ 𝑚5 for 𝑡 ∈ [𝑡1 , 𝑡2 ) and 𝑆(𝑡2 ) = 𝑚5 . In this step, we
consider two possible cases for 𝑡2 .
Case 1. 𝑡2 = (𝑛1 + 𝜏 − 1)𝑇, 𝑛1 ∈ N. Then 𝑆(𝑡2+ ) = (1 −
𝑃𝑆 )𝑆(𝑡2 ) < 𝑚5 . Select 𝑛2 , 𝑛3 ∈ N such that (𝑛2 − 1) ≥ 𝑛6∗
and (1 − 𝑃𝑆 )𝑛2 𝑒𝑛3 𝜂+𝑛2 𝜎𝑇 > (1 − 𝑃𝑆 )𝑛2 𝑒𝑛3 𝜂+(𝑛2 +1)𝜎𝑇 > 1, where
̃ = (𝑛2 + 𝑛3 )𝑇,
𝜎 = 𝛽𝑃1 (𝑚4 ) − 𝑔(𝑀) − 𝑃2 (0)𝑀 − 𝑑𝑆 < 0. Let 𝑇
̃ such that
then we have the claim: there exists 𝑡3 ∈ (𝑡2 , 𝑡2 + 𝑇]
𝑆(𝑡3 ) ≥ 𝑚5 . If the claim is false, we will get a contradiction in
the following.
∗ (𝑡) − 𝜀 , 𝐼(𝑡) ≤
̃
According to Step 1, we have 𝑥(𝑡) ≥ 𝑥
1
∗
∗
∗
̃
̃
(𝑡) + 𝜀1 , 𝑦𝐽 (𝑡) ≤ 𝑦
(𝑡)
+
𝜀
,
𝑦
(𝑡)
≤
𝑦
(𝑡)
+
𝜀
𝐼̃
1 𝑀
1 for 𝑡 ≥
𝐽
𝑀
(𝑛1 + 𝑛2 − 1)𝑇. Then, we have
∗ (𝑡) − 𝜀 ) 𝑆 (𝑡) − 𝑔 (𝐼̃
∗ (𝑡) + 𝜀 ) 𝑆 (𝑡)
̃
𝑆 (𝑡) ≥ 𝛽𝑃1 (𝑥
1
1
∗
− 𝑃2 (0) (𝑦̃
𝑀 (𝑡) + 𝜀1 ) 𝑆 (𝑡) − 𝑑𝑆 𝑆 (𝑡) ,
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇, 𝑡 ≠ 𝑛𝑇,
Δ𝑆 (𝑡) = −𝑃𝑆 𝑆 (𝑡) ,
(64)
𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
Δ𝑆 (𝑡) = 0,
𝑡 = 𝑛𝑇,
̃ As in Step 1, we have
for 𝑡 ∈ [𝑡2 + 𝑛2 𝑇, 𝑡2 + 𝑇].
̃ ≥ 𝑆 (𝑡2 + 𝑛2 𝑇) 𝑒𝑛3 𝜂 .
𝑆 (𝑡2 + 𝑇)
(65)
Since 𝑥(𝑡) ≥ 𝑚4 , 𝐼(𝑡) ≤ 𝑀, 𝑦𝑀(𝑡) ≤ 𝑀 and 𝑃2 (𝑆(𝑡)) <
𝑃2 (0)𝑆(𝑡), we have
𝑆 (𝑡)
≥ (𝛽𝑃1 (𝑚4 ) − 𝑔 (𝑀) −
𝑃2
(0) 𝑀 − 𝑑𝑆 ) 𝑆 (𝑡) = 𝜎𝑆 (𝑡) ,
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇,
Δ𝑆 (𝑡) = −𝑃𝑆 𝑆 (𝑡) ,
Δ𝑆 (𝑡) = 0,
𝑡 ≠ 𝑛𝑇,
𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
(67)
𝑛
≥ (1 − 𝑃𝑆 ) 2 𝑚5 𝑒𝑛2 𝜎𝑇 .
̃
Thus, by (65) and (67), we have 𝑆(𝑡2 + 𝑇)
≥ (1 −
𝑛2
𝑛3 𝜂+𝑛2 𝜎𝑇
𝑃𝑆 ) 𝑚5 𝑒
> 𝑚5 , which is a contradiction. Let 𝑡4 =
inf{𝑡 > 𝑡2 | 𝑆(𝑡) ≥ 𝑚5 }, then for 𝑡 ∈ [𝑡2 , 𝑡4 ), 𝑆(𝑡) < 𝑚5 and
𝑆(𝑡4 ) = 𝑚5 . So, 𝑆(𝑡) ≥ 𝑆(𝑡2+ )𝑒𝜎(𝑡−𝑡2 ) = (1 − 𝑃𝑆 )𝑚5 𝑒𝜎(𝑡−𝑡2 ) ≥
̃1 for 𝑡 ∈ [𝑡2 , 𝑡4 ).
(1 − 𝑃𝑆 )𝑛2 +𝑛3 𝑚5 𝑒𝜎(𝑛2 +𝑛3 )𝑇 = 𝑚
Case 2 (𝑡2 ≠ (𝑛1 + 𝜏 − 1)𝑇, 𝑛1 ∈ N). Suppose that 𝑡2 ∈ ((𝑛1 +
𝜏 − 1)𝑇, (𝑛1 + 𝜏)𝑇), 𝑛1 ∈ N. 𝑆(𝑡) ≥ 𝑚5 for 𝑡 ∈ [𝑡1 , 𝑡2 ) and
𝑆(𝑡2 ) = 𝑚5 . There are two possible cases for 𝑡 ∈ (𝑡2 , (𝑛1 + 𝜏)𝑇).
Case 2a. If 𝑆(𝑡) ≤ 𝑚5 for all 𝑡 ∈ (𝑡2 , (𝑛1 + 𝜏)𝑇), similar to Case
̃
1, we can prove there exists a 𝑡3 ∈ ((𝑛1 + 𝜏)𝑇, (𝑛1 + 𝜏)𝑇 + 𝑇]
such that 𝑆(𝑡3 ) ≥ 𝑚5 . Let 𝑡4 = inf{𝑡 > 𝑡2 | 𝑆(𝑡) ≥ 𝑚5 }, then for
𝑡 ∈ [𝑡2 , 𝑡4 ), 𝑆(𝑡) < 𝑚5 and 𝑆(𝑡4 ) = 𝑚5 . So, 𝑆(𝑡) ≥ 𝑆(𝑡2 )𝑒𝜎(𝑡−𝑡2 ) =
̃1 for all
𝑚5 𝑒𝜎(𝑡−𝑡2 ) ≥ (1 − 𝑃𝑆 )𝑛2 +𝑛3 𝑚5 𝑒𝜎(𝑛2 +𝑛3 +1)𝑇 = 𝑚∗ < 𝑚
𝑡 ∈ [𝑡2 , 𝑡4 ).
Case 2b. If there exists a 𝑡 ∈ (𝑡2 , (𝑛1 +𝜏)𝑇) such that 𝑆(𝑡) ≥ 𝑚5 .
Let 𝑡4 = inf{𝑡 > 𝑡2 | 𝑆(𝑡) ≥ 𝑚5 }, then for 𝑡 ∈ [𝑡2 , 𝑡4 ), 𝑆(𝑡) <
𝑚5 and 𝑆(𝑡4 ) = 𝑚5 . So, 𝑆(𝑡) ≥ 𝑆(𝑡2 )𝑒𝜎(𝑡−𝑡2 ) = 𝑚5 𝑒𝜎(𝑡−𝑡2 ) ≥
𝑚5 𝑒𝜎𝑇 > 𝑚∗ for all 𝑡 ∈ [𝑡2 , 𝑡4 ).
Since 𝑆(𝑡) ≥ 𝑚5 for some 𝑡 ≥ 𝑡1 , in both cases a similar
discussion can be continued. The proof is completed.
5. Numerical Simulations and Conclusions
In this section, we will give an example and its simulations to
show the efficiency of the criteria derived in Section 4.
In system (1), let 𝑃1 (𝑥(𝑡)) = 𝑎𝑥(𝑡), 𝑔(𝐼(𝑡)) = 𝑏𝐼(𝑡),
and 𝑃2 (𝑆(𝑡)) = ℎ(1 − 𝑒−𝑐𝑆(𝑡) ), 𝑎, 𝑏, 𝑐, ℎ > 0. Namely,
𝑃1 (𝑥(𝑡)) describes an Holling type-I functional response of
the pest, 𝑃2 (𝑆(𝑡)) describes a Ivlev-type functional response
of the pest ’s natural predator. Therefore, we consider the pest
management model with impulsive releasing and harvesting
at two different fixed moments:
𝑥 (𝑡) = 𝑟𝑥 (𝑡) (1 −
𝑥 (𝑡)
) − 𝑎𝑥 (𝑡) 𝑆 (𝑡) ,
𝐾
𝑆 (𝑡) = 𝛽𝑎𝑥 (𝑡) 𝑆 (𝑡) − 𝑏𝐼 (𝑡) 𝑆 (𝑡)
− ℎ (1 − 𝑒−𝑐𝑆(𝑡) ) 𝑦𝑀 (𝑡) − 𝑑𝑆 𝑆 (𝑡) ,
𝐼 (𝑡) = 𝑏𝐼 (𝑡) 𝑆 (𝑡) − 𝑑𝐼 𝐼 (𝑡) ,
𝑦𝐽 (𝑡) = 𝜆ℎ (1 − 𝑒−𝑐𝑆(𝑡) ) 𝑦𝑀 (𝑡) − 𝑑𝐽 𝑦𝐽 (𝑡) − 𝑚𝑦𝐽 (𝑡) ,
𝑦𝑀
(𝑡) = 𝑚𝑦𝐽 (𝑡) − 𝑑𝑀𝑦𝑀 (𝑡) ,
𝑡 ≠ (𝑛 + 𝜏 − 1) 𝑇,
𝑡 = 𝑛𝑇,
(66)
𝑡 ≠ 𝑛𝑇,
14
Abstract and Applied Analysis
20
6
15
4
𝑆
𝑥 10
2
5
0
0
10
20
30
0
40
0
10
20
𝑡
40
30
40
𝑡
(a)
(b)
3
2
1.5
2
𝑌𝐽
𝐼
1
0
30
1
0.5
0
10
20
30
0
40
0
10
20
𝑡
𝑡
(c)
(d)
4
𝑌𝑀
3
2
1
0
0
10
20
30
40
𝑡
(e)
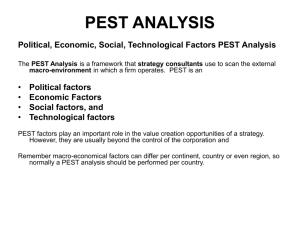
Figure 1: Time series of the system (68) with 𝑟 = 8, 𝐾 = 10, 𝑎 = 0.8, 𝛽 = 0.5, 𝑏 = 0.3, ℎ = 8, 𝑐 = 0.2, 𝜆 = 0.6, 𝑚 = 2, 𝑑𝑆 = 0.2, 𝑑𝐼 = 0.5,
𝑑𝐽 = 0.4, 𝑑𝑀 = 0.2, 𝛿 = 0.4, 𝑃𝑆 = 𝑃𝐼 = 𝑃𝐽 = 𝑃𝑀 = 0.2, 𝛿𝐼 = 0.2, 𝛿𝐽 = 0.3, 𝛿𝑀 = 0.5, 𝜏 = 0.3, 𝑇 = 0.5, 𝑥(0) = 20, 𝑆(0) = 2, 𝐼(0) = 2, 𝑦𝐽 (0) = 0.5,
𝑦𝑀 (0) = 0.5.
Δ𝑥 (𝑡) = −𝛿𝑥 (𝑡) ,
Δ𝑦𝑀 (𝑡) = 𝛿𝑀,
Δ𝑆 (𝑡) = −𝑃𝑆 𝑆 (𝑡) ,
𝑡 = 𝑛𝑇.
(68)
Δ𝐼 (𝑡) = −𝑃𝐼 𝐼 (𝑡) ,
Δ𝑦𝐽 (𝑡) = −𝑃𝐽 𝑦𝐽 (𝑡) ,
Δ𝑦𝑀 (𝑡) = −𝑃𝑀𝑦𝑀 (𝑡) ,
𝑡 = (𝑛 + 𝜏 − 1) 𝑇,
Δ𝑥 (𝑡) = 0,
Δ𝑆 (𝑡) = 0,
Δ𝐼 (𝑡) = 𝛿𝐼 ,
Δ𝑦𝐽 (𝑡) = 𝛿𝐽 ,
So, by (22), (23), and (25), we have
𝑇
𝛽 ∫ 𝑃1 (𝑥∗ (𝑡)) 𝑑𝑡 =
0
𝛽𝑎𝐾
(𝑟𝑇 + ln (1 − 𝛿)) = 𝜃1 ,
𝑟
𝑇
∫ 𝑔 (𝐼∗ (𝑡)) 𝑑𝑡
0
=
𝑏𝛿𝐼 [1 − 𝑒−𝑑𝐼 𝜏𝑇 + (1 − 𝑃𝐼 ) (𝑒−𝑑𝐼 𝜏𝑇 − 𝑒−𝑑𝐼 𝑇 )]
= 𝜃2 ,
𝑑𝐼 (1 − (1 − 𝑃𝐼 ) 𝑒−𝑑𝐼 𝑇 )
Abstract and Applied Analysis
15
4
1.6
3.8
3.6
1.4
3.4
1.2
1
𝑌𝑀
𝐼
3.2
3
2.8
0.8
2.6
2.4
0.6
2.2
0.4
2
5
6
7
8
9
10
0
0.2
0.4
0.6
𝑌𝐽
𝑥
(a)
(b)
Figure 2: Phase portrait of the system (68) with 𝑟 = 8, 𝐾 = 10, 𝑎 = 0.8, 𝛽 = 0.5, 𝑏 = 0.3, ℎ = 8, 𝑐 = 0.2, 𝜆 = 0.6, 𝑚 = 2, 𝑑𝑆 = 0.2, 𝑑𝐼 = 0.5,
𝑑𝐽 = 0.4, 𝑑𝑀 = 0.2, 𝛿 = 0.4, 𝑃𝑆 = 𝑃𝐼 = 𝑃𝐽 = 𝑃𝑀 = 0.2, 𝛿𝐼 = 0.2, 𝛿𝐽 = 0.3, 𝛿𝑀 = 0.5, 𝜏 = 0.3, 𝑇 = 0.5, 𝑥(0) = 20, 𝑆(0) = 2, 𝐼(0) = 2, 𝑦𝐽 (0) = 0.5,
𝑦𝑀 (0) = 0.5.
where
𝑇
∗
∫ 𝑦𝑀
(𝑡) 𝑑𝑡
∗
(0+ ) =
𝑦𝑀
0
=
∗
(0+ )
𝑦𝑀
(1 − 𝑒−𝑑𝑀 𝜏𝑇)
𝑑𝑀
+
∗
𝑦𝑀
(𝜏𝑇+ ) =
𝑚𝛿𝐽
𝐴 (𝜏𝑇) =
(1 − (1 − 𝑃𝐽 ) 𝑒−(𝑚+𝑑𝐽 )𝑇 ) (𝑑𝑀 − (𝑚 + 𝑑𝐽 ))
×(
1 − 𝑒−(𝑚+𝑑𝐽 )𝜏𝑇 1 − 𝑒−𝑑𝑀 𝜏𝑇
−
)
𝑚 + 𝑑𝐽
𝑑𝑀
𝐵 (𝑇) =
(1 − (1 − 𝑃𝐽 ) 𝑒−(𝑚+𝑑𝐽 )𝑇 ) (𝑑𝑀 − (𝑚 + 𝑑𝐽 ))
𝑚𝛿𝐽 (𝑒(𝑑𝑀 −(𝑚+𝑑𝐽 ))𝜏𝑇 − 1)
(1 − (1 − 𝑃𝐽 ) 𝑒−(𝑚+𝑑𝐽 )𝑇 ) (𝑑𝑀 − (𝑚 + 𝑑𝐽 ))
,
𝑚𝛿𝐽 (1 − 𝑃𝐽 ) (𝑒(𝑑𝑀 −(𝑚+𝑑𝐽 ))𝑇 − 𝑒(𝑑𝑀 −(𝑚+𝑑𝐽 ))𝜏𝑇 )
(1 − (1 − 𝑃𝐽 ) 𝑒−(𝑚+𝑑𝐽 )𝑇 ) (𝑑𝑀 − (𝑚 + 𝑑𝐽 ))
,
.
(𝑇2) If 𝜃1 − 𝜃2 − ℎ𝑐𝑒−𝑐𝑀𝜃3 − 𝑑𝑆 𝑇 < ln(1/(1 − 𝑃𝑆 )),
then the susceptible pest-eradication periodic solu∗
(𝑡)) of system (68) is
tion (𝑥∗ (𝑡), 0, 𝐼∗ (𝑡), 𝑦𝐽∗ (𝑡), 𝑦𝑀
globally asymptotically stable, where 𝑀 is defined in
Lemma 6.
(𝑇3) If 𝜃1 − 𝜃2 − ℎ𝑐𝜃3 − 𝑑𝑆 𝑇 > ln(1/(1 − 𝑃𝑆 ), then system
(68) is permanent.
𝑒−(𝑚+𝑑𝐽 )𝜏𝑇 − 𝑒−(𝑚+𝑑𝐽 )𝑇
𝑚 + 𝑑𝐽
−
1 − (1 − 𝑃𝑀) 𝑒−𝑑𝑀 𝑇
(𝑇1) If 𝜃1 − 𝜃2 − 𝜃3 − 𝑑𝑆 𝑇 < ln(1/(1 − 𝑃𝑆 )), then the
susceptible pest-eradication periodic solution (𝑥∗ (𝑡),
∗
(𝑡)) of system (68) is locally asymp0, 𝐼∗ (𝑡), 𝑦𝐽∗ (𝑡), 𝑦𝑀
totically stable.
𝑚𝛿𝐽 (1 − 𝑃𝐽 )
×(
(1 − 𝑃𝑀) [𝐴 (𝜏𝑇) + 𝑒−𝑑𝑀 𝑇 𝐵 (𝑇) + 𝛿𝑀] 𝑒−𝑑𝑀 𝜏𝑇
Then, by Theorems 11 and 14, we have the following.
𝑦∗ (𝜏𝑇+ ) 𝑒𝑑𝑀 𝜏𝑇 −𝑑𝑀 𝜏𝑇 𝑑𝑀 𝑇
(𝑒
−𝑒 )
+ 𝑀
𝑑𝑀
+
[(1 − 𝑃𝑀) 𝐴 (𝜏𝑇) + 𝐵 (𝑇)] 𝑒−𝑑𝑀 𝑇 + 𝛿𝑀
,
1 − (1 − 𝑃𝑀) 𝑒−𝑑𝑀 𝑇
𝑒−𝑑𝑀 𝜏𝑇 − 𝑒−𝑑𝑀 𝑇 (𝑑𝑀 −(𝑚+𝑑𝐽 ))𝜏𝑇
𝑒
)
𝑑𝑀
= 𝜃3 ,
(69)
In the following, we analyze the locally asymptotical
stability of the susceptible pest-eradication periodic solution
and permanence of system (68).
16
Abstract and Applied Analysis
0.4
20
0.3
15
𝑥
0.2
𝑆
10
5
0.1
0
20
40
60
0
80
0
20
40
(a)
2
1.5
1.5
1
1
0.5
0.5
0
80
(b)
2
𝑌𝐽
𝐼
60
𝑡
𝑡
0
20
40
60
0
80
0
20
40
𝑡
60
80
𝑡
(c)
(d)
3.5
𝑌𝑀
3
2.5
2
1.5
0
20
40
60
80
𝑡
(e)
Figure 3: Time series of the system (68) with 𝑟 = 8, 𝐾 = 10, 𝑎 = 0.8, 𝛽 = 0.5, 𝑏 = 0.3, ℎ = 8, 𝑐 = 0.2, 𝜆 = 0.6, 𝑚 = 2, 𝑑𝑆 = 0.2, 𝑑𝐼 = 0.5,
𝑑𝐽 = 0.4, 𝑑𝑀 = 0.2, 𝛿 = 0.4, 𝑃𝑆 = 𝑃𝐼 = 𝑃𝐽 = 𝑃𝑀 = 0.2, 𝛿𝐼 = 0.2, 𝛿𝐽 = 0.3, 𝛿𝑀 = 0.5, 𝜏 = 0.3, 𝑇 = 1, 𝑥(0) = 20, 𝑆(0) = 0.2, 𝐼(0) = 2, 𝑦𝐽 (0) = 2,
𝑦𝑀 (0) = 2.
Assume that 𝑥(0) = 20, 𝑆(0) = 2, 𝐼(0) = 2, 𝑦𝐽 (0) = 0.5,
𝑦𝑀(0) = 0.5, 𝑟 = 8, 𝐾 = 10, 𝑎 = 0.8, 𝛽 = 0.5, 𝑏 = 0.3, ℎ = 8,
𝑐 = 0.2, 𝜆 = 0.6, 𝑚 = 2, 𝑑𝑆 = 0.2, 𝑑𝐼 = 0.5, 𝑑𝐽 = 0.4, 𝑑𝑀 = 0.2,
𝛿 = 0.4, 𝑃𝑆 = 𝑃𝐼 = 𝑃𝐽 = 𝑃𝑀 = 0.2, 𝛿𝐼 = 0.2, 𝛿𝐽 = 0.3,
𝛿𝑀 = 0.5, 𝜏 = 0.3, 𝑇 = 0.5. Obviously, the condition of (T1)
is satisfied, then the susceptible pest-eradication periodic
solution of system (68) is locally asymptotically stable, which
can be seen from the numerical simulation in Figures 1 and 2.
Assume that 𝑥(0) = 20, 𝑆(0) = 0.2, 𝐼(0) = 2, 𝑦𝐽 (0) = 2,
𝑦𝑀(0) = 2, 𝑟 = 8, 𝐾 = 10, 𝑎 = 0.8, 𝛽 = 0.5, 𝑏 = 0.3, ℎ = 8,
𝑐 = 0.2, 𝜆 = 0.6, 𝑚 = 2, 𝑑𝑆 = 0.2, 𝑑𝐼 = 0.5, 𝑑𝐽 = 0.4, 𝑑𝑀 = 0.2,
𝛿 = 0.4, 𝑃𝑆 = 𝑃𝐼 = 𝑃𝐽 = 𝑃𝑀 = 0.2, 𝛿𝐼 = 0.2, 𝛿𝐽 = 0.3,
𝛿𝑀 = 0.5, 𝜏 = 0.3, 𝑇 = 1. Obviously, the condition of (T3) is
satisfied. Then, system (68) is permanent, which can also be
seen from Figures 3 and 4.
From results of the numerical simulation, we know that
there exists an impulsive harvesting(or releasing) periodic
threshold 𝑇∗ , which satisfies 0.5 < 𝑇∗ < 1. If 𝑇 < 𝑇∗ and
the other parameters are fixed (𝑟 = 8, 𝐾 = 10, 𝑎 = 0.8,
𝛽 = 0.5, 𝑏 = 0.3, ℎ = 8, 𝑐 = 0.2, 𝜆 = 0.6, 𝑚 = 2,
𝑑𝑆 = 0.2, 𝑑𝐼 = 0.5, 𝑑𝐽 = 0.4, 𝑑𝑀 = 0.2, 𝛿 = 0.4, 𝑃𝑆 =
𝑃𝐼 = 𝑃𝐽 = 𝑃𝑀 = 0.2, 𝛿𝐼 = 0.2, 𝛿𝐽 = 0.3, 𝛿𝑀 = 0.5, 𝜏 =
0.3, 𝑇 = 0.5.), then the susceptible pest-eradication periodic
∗
(𝑡)) of system (68) is locally
solution (𝑥∗ (𝑡), 0, 𝐼∗ (𝑡), 𝑦𝐽∗ (𝑡), 𝑦𝑀
∗
asymptotically stable. If 𝑇 > 𝑇 and the other parameters are
fixed (𝑟 = 8, 𝐾 = 10, 𝑎 = 0.8, 𝛽 = 0.5, 𝑏 = 0.3, ℎ = 8, 𝑐 = 0.2,
𝜆 = 0.6, 𝑚 = 2, 𝑑𝑆 = 0.2, 𝑑𝐼 = 0.5, 𝑑𝐽 = 0.4, 𝑑𝑀 = 0.2,
𝛿 = 0.4, 𝑃𝑆 = 𝑃𝐼 = 𝑃𝐽 = 𝑃𝑀 = 0.2, 𝛿𝐼 = 0.2, 𝛿𝐽 = 0.3,
𝛿𝑀 = 0.5, 𝜏 = 0.3, 𝑇 = 0.5.), then system (68) is permanent.
The same discussion can be applied to other parameters.
In this paper, we proposed a pest management model with
impulsive releasing (periodic infective pests, immature and
mature natural enemies releasing) and harvesting (periodic
crops harvesting) at two different fixed moments. By means
Abstract and Applied Analysis
17
0.16
𝑆
3.2
0.18
3
0.16
2.8
0.14
0.14
0.12
0.12
𝑆
0.1
2.6
𝑌𝑀
0.18
0.2
0.1
2.4
2.2
0.08
0.08
0.06
0.06
2
0.04
0.04
1.8
0.02
0.02
1.6
6
8
𝑥
10
0.2
(a)
0.4
0.6
0
0.2
𝐼
(b)
0.4
0.6
𝑌𝐽
(c)
Figure 4: Phase portrait of the system (68) with 𝑟 = 8, 𝐾 = 10, 𝑎 = 0.8, 𝛽 = 0.5, 𝑏 = 0.3, ℎ = 8, 𝑐 = 0.2, 𝜆 = 0.6, 𝑚 = 2, 𝑑𝑆 = 0.2, 𝑑𝐼 = 0.5,
𝑑𝐽 = 0.4, 𝑑𝑀 = 0.2, 𝛿 = 0.4, 𝑃𝑆 = 𝑃𝐼 = 𝑃𝐽 = 𝑃𝑀 = 0.2, 𝛿𝐼 = 0.2, 𝛿𝐽 = 0.3, 𝛿𝑀 = 0.5, 𝜏 = 0.3, 𝑇 = 1, 𝑥(0) = 20, 𝑆(0) = 0.2, 𝐼(0) = 2, 𝑦𝐽 (0) = 2,
𝑦𝑀 (0) = 2.
of Floquet theory and multicomparison results for impulsive
differential equations, two sufficient conditions ensuring the
locally and globally asymptotical stability of the susceptible
pest-eradication period solution and permanence of the
system are derived.
Acknowledgments
This work is supported partially by National Natural Science
Foundation of China under Grant no. 10971240 and no.
61004042, Key Project of Chinese Education Ministry under
Grant no. 212138, Natural Science Foundation of Chongqing
under Grant CQ CSTC 2011BB0117, and Foundation of
Science and Technology Project of Chongqing Education
Commission under Grant KJ120630.
References
[1] P. Georgescu and G. Moroşanu, “Pest regulation by means of
impulsive controls,” Applied Mathematics and Computation, vol.
190, no. 1, pp. 790–803, 2007.
[2] T. Zhang, X. Meng, and Y. Song, “The dynamics of a highdimensional delayed pest management model with impulsive
pesticide input and harvesting prey at different fixed moments,”
Nonlinear Dynamics, vol. 64, no. 1-2, pp. 1–12, 2011.
[3] Y. Ma, B. Liu, and W. Feng, “Dynamics of a birth-pulse singlespecies model with restricted toxin input and pulse harvesting,”
Discrete Dynamics in Nature and Society, vol. 2010, Article ID
142534, 20 pages, 2010.
[4] S. Cai, “A stage-structured single species model with pulse input
in a polluted environment,” Nonlinear Dynamics, vol. 57, no. 3,
pp. 375–382, 2009.
[5] B. Liu, L. Chen, and Y. Zhang, “The dynamics of a preydependent consumption model concerning impulsive control
strategy,” Applied Mathematics and Computation, vol. 169, no. 1,
pp. 305–320, 2005.
[6] P. Georgescu, H. Zhang, and L. Chen, “Bifurcation of nontrivial
periodic solutions for an impulsively controlled pest management model,” Applied Mathematics and Computation, vol. 202,
no. 2, pp. 675–687, 2008.
[7] P. Georgescu and H. Zhang, “An impulsively controlled
predator-pest model with disease in the pest,” Nonlinear Analysis. Real World Applications, vol. 11, no. 1, pp. 270–287, 2010.
[8] C. Wei and L. Chen, “Eco-epidemiology model with age structure and prey-dependent consumption for pest management,”
Applied Mathematical Modelling, vol. 33, no. 12, pp. 4354–4363,
2009.
[9] J. Jiao, S. Cai, and L. Chen, “Analysis of a stage-structured
predatory-prey system with birth pulse and impulsive harvesting at different moments,” Nonlinear Analysis. Real World
Applications, vol. 12, no. 4, pp. 2232–2244, 2011.
[10] J. Jiao, G. Pang, L. Chen, and G. Luo, “A delayed stage-structured
predator-prey model with impulsive stocking on prey and
continuous harvesting on predator,” Applied Mathematics and
Computation, vol. 195, no. 1, pp. 316–325, 2008.
[11] Z. Liu and R. Tan, “Impulsive harvesting and stocking in a
Monod-Haldane functional response predator-prey system,”
Chaos, Solitons and Fractals, vol. 34, no. 2, pp. 454–464, 2007.
[12] L. Nie, Z. Teng, L. Hu, and J. Peng, “The dynamics of a LotkaVolterra predator-prey model with state dependent impulsive
harvest for predator,” Biosystems, vol. 98, no. 2, pp. 67–72, 2009.
[13] D. Baı̆nov and P. Simeonov, Impulsive Differential Equations:
Periodic Solutions and Applications, John Wiley & Sons, New
York, NY, USA, 1993.
18
[14] V. Lakshmikantham, D. D. Baı̆nov, and P. S. Simeonov, Theory
of Impulsive Differential Equations, World Scientific, Singapore,
1989.
[15] T. Yang, Impulsive Control Theory, vol. 272, Springer, Berlin,
Germany, 2001.
[16] C. S. Holling, “The functional response of predators to prey
density and its role in mimicry and population regulation,”
Memoirs of the Entomological Society of Canada, vol. 45, pp. 5–
60, 1965.
[17] Y. Wang and M. Zhao, “Dynamic analysis of an impulsively
controlled predator-prey model with Holling type IV functional
response,” Discrete Dynamics in Nature and Society, vol. 2012,
Article ID 141272, 18 pages, 2012.
[18] C. Shen, “Permanence and global attractivity of the foodchain system with Holling IV type functional response,” Applied
Mathematics and Computation, vol. 194, no. 1, pp. 179–185, 2007.
[19] X. Song and Y. Li, “Dynamic behaviors of the periodic
predator-prey model with modified Leslie-Gower Holling-type
II schemes and impulsive effect,” Nonlinear Analysis. Real World
Applications, vol. 9, no. 1, pp. 64–79, 2008.
[20] B. Liu, Z. Teng, and L. Chen, “Analysis of a predator-prey
model with Holling II functional response concerning impulsive control strategy,” Journal of Computational and Applied
Mathematics, vol. 193, no. 1, pp. 347–362, 2006.
[21] B. Liu, Y. Zhang, and L. Chen, “Dynamic complexities of a
Holling I predator-prey model concerning periodic biological
and chemical control,” Chaos, Solitons and Fractals, vol. 22, no.
1, pp. 123–134, 2004.
[22] X. Liu and L. Chen, “Complex dynamics of Holling type II
Lotka-Volterra predator-prey system with impulsive perturbations on the predator,” Chaos, Solitons and Fractals, vol. 16, no.
2, pp. 311–320, 2003.
[23] X. Song and Y. Li, “Dynamic complexities of a Holling II twoprey one-predator system with impulsive effect,” Chaos, Solitons
& Fractals, vol. 33, no. 2, pp. 463–478, 2007.
[24] S. Zhang, D. Tan, and L. Chen, “Chaos in periodically forced
Holling type IV predator-prey system with impulsive perturbations,” Chaos, Solitons and Fractals, vol. 27, no. 4, pp. 980–990,
2006.
[25] S. Zhang, F. Wang, and L. Chen, “A food chain model with
impulsive perturbations and Holling IV functional response,”
Chaos, Solitons and Fractals, vol. 26, no. 3, pp. 855–866, 2005.
[26] L.-L. Wang and W.-T. Li, “Periodic solutions and permanence
for a delayed nonautonomous ratio-dependent predator-prey
model with Holling type functional response,” Journal of Computational and Applied Mathematics, vol. 162, no. 2, pp. 341–357,
2004.
[27] V. S. Ivlev, Experimental Ecology of the Feeding of Fishes, Yale
University Press, New Haven, Conn, USA, 1961.
[28] H. K. Baek, S. D. Kim, and P. Kim, “Permanence and stability
of an Ivlev-type predator-prey system with impulsive control
strategies,” Mathematical and Computer Modelling, vol. 50, no.
9-10, pp. 1385–1393, 2009.
[29] H. Wang and W. Wang, “The dynamical complexity of a
Ivlev-type prey-predator system with impulsive effect,” Chaos,
Solitons & Fractals, vol. 38, no. 4, pp. 1168–1176, 2008.
[30] Z. Xiang and X. Song, “The dynamical behaviors of a food chain
model with impulsive effect and Ivlev functional response,”
Chaos, Solitons & Fractals, vol. 39, no. 5, pp. 2282–2293, 2009.
[31] X. Song, M. Hao, and X. Meng, “A stage-structured predatorprey model with disturbing pulse and time delays,” Applied
Mathematical Modelling, vol. 33, no. 1, pp. 211–223, 2009.
Abstract and Applied Analysis
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014