Document 10824591
advertisement

Hindawi Publishing Corporation
Abstract and Applied Analysis
Volume 2012, Article ID 843178, 13 pages
doi:10.1155/2012/843178
Research Article
Positive Periodic Solutions of Nicholson-Type
Delay Systems with Nonlinear Density-Dependent
Mortality Terms
Wei Chen1 and Lijuan Wang2
1
School of Mathematics and Information, Shanghai Lixin University of Commerce,
Shanghai 201620, China
2
College of Mathematics, Physics and Information Engineering, Jiaxing University, Zhejiang,
Jiaxing 314001, China
Correspondence should be addressed to Lijuan Wang, wanglijuan1976@yahoo.com.cn
Received 3 October 2012; Revised 9 November 2012; Accepted 9 November 2012
Academic Editor: Allan Peterson
Copyright q 2012 W. Chen and L. Wang. This is an open access article distributed under the
Creative Commons Attribution License, which permits unrestricted use, distribution, and
reproduction in any medium, provided the original work is properly cited.
This paper is concerned with the periodic solutions for a class of Nicholson-type delay systems
with nonlinear density-dependent mortality terms. By using coincidence degree theory, some
criteria are obtained to guarantee the existence of positive periodic solutions of the model.
Moreover, an example and a numerical simulation are given to illustrate our main results.
1. Introduction
In the last twenty years, the delay differential equations have been widely studied both in
a theoretical context and in that of related applications 1–4. As a famous and common
delay dynamic system, Nicholson’s blowflies model and its modifications have made
remarkable progress that has been collected in 5 and the references cited there in. Recently,
to describe the dynamics for the models of marine protected areas and B-cell chronic
lymphocytic leukemia dynamics which belong to the Nicholson-type delay differential
systems, Berezansky et al. 6, Wang et al. 7, and Liu 8 studied the problems on
the permanence, stability, and periodic solution of the following Nicholson-type delay
systems:
N1 t −α1 tN1 t β1 tN2 t m
j1
c1j tN1 t − τ1 jt e−γ1j tN1 t−τ1j t ,
2
Abstract and Applied Analysis
N2 t −α2 tN2 t β2 tN1 t m
c2j tN2 t − τ2 jt e−γ2j tN2 t−τ2j t ,
j1
1.1
where αi , βi , cij , γij , τij ∈ CR, 0 ∞, and i 1, 2, j 1, 2, . . . , m.
In 5, Berezansky et al. also pointed out that a new study indicates that a linear
model of density-dependent mortality will be most accurate for populations at low densities
and marine ecologists are currently in the process of constructing new fishery models with
nonlinear density-dependent mortality rates. Consequently, Berezansky et al. 5 presented
an open problem: to reveal the dynamics of the following Nicholson’s blowflies model with
a nonlinear density-dependent mortality term:
N t −DNt P Nt − τe−aNt−τ ,
1.2
where P is a positive constant and function D might have one of the following forms: DN aN/N b or DN a − be−N with positive constants a, b > 0.
Most recently, based upon the ideas in 5–8, Liu and Gong 9 established the results
on the permanence for the Nicholson-type delay system with nonlinear density-dependent
mortality terms. Consequently, the problem on periodic solutions of Nicholson-type system
with DN a − be−N has been studied extensively in 10–13. However, to the best of
our knowledge, there exist few results on the existence of the positive periodic solutions of
Nicholson-type delay system with DN aN/N b. Motivated by this, the main purpose
of this paper is to give the conditions to guarantee the existence of positive periodic solutions
of the following Nicholson-type delay system with nonlinear density-dependent mortality
terms:
N1 t −D11 t, N1 t D12 t, N2 t l
c1j tN1 t − τ1j t e−γ1j tN1 t−τ1j t ,
j1
l
N2 t −D22 t, N2 t D21 t, N1 t c2j tN2 t − τ2j t e−γ2j tN2 t−τ2j t ,
1.3
j1
under the admissible initial conditions
xt0 ϕ,
ϕ ∈ C C −r1 , 0, R1 × C −r2 , 0, R1 ,
ϕi 0 > 0,
1.4
where Dij t, N aij tN/bij t N, aij , bij , cik , γik : R → 0, ∞ and τik : R → 0, ∞
are all bounded continuous functions, and ri max1≤k≤l {supt∈R1 τik t}, i, j 1, 2, k 1, . . . , l.
For convenience, we introduce some notations. Throughout this paper, given a
bounded continuous function g defined on R1 , let g and g − be defined as
g − inf gt,
t∈R1
g sup gt.
t∈R1
1.5
Abstract and Applied Analysis
3
We also assume that aij , bij , cik , γik : R → 0, ∞ and τik : R → 0, ∞ are all ω-periodic
}, and i, j 1, 2, k 1, . . . , l.
functions, ri max1≤k≤l {τik
Set
Ai 2
ω
0
aii t
dt,
bii t
D1 ω
Bi a12 tdt,
0
l ω
j1
cij tdt,
0
D2 ω
γi max γij ,
a21 tdt,
1≤j≤l
Ci ω
0
aii tdt,
γi− min γij− ,
1≤j≤l
1.6
i 1, 2.
0
Let Rn Rn be the set of all nonnegative real vectors; we will use x x1 , x2 , . . . , xn T ∈ Rn to denote a column vector, in which the symbol T denotes
the transpose of a vector. We let |x| denote the absolute-value vector given by |x| |x1 |, |x2 |, . . . , |xn |T and define ||x|| max1≤i≤n |xi |. For matrix A aij n×n , AT denotes the
transpose of A. A matrix or vector A ≥ 0 means that all entries of A are greater than or equal
to zero. A > 0 can be defined similarly. For matrices or vectors A and B, A ≥ B resp. A > B
means that A − B ≥ 0 resp. A − B > 0. We also define
the derivative
ω and integral
ω of vector
ω
function xt x1 t, x2 tT as x x1 t, x2 tT and 0 xtdt 0 x1 tdt, 0 x2 tdtT .
The organization of this paper is as follows. In the next section, some sufficient
conditions for the existence of the positive periodic solutions of model 1.3 are given by
using the method of coincidence degree. In Section 3, an example and numerical simulation
are given to illustrate our results obtained in the previous section.
2. Existence of Positive Periodic Solutions
In order to study the existence of positive periodic solutions, we first introduce the continuation theorem as follows.
Lemma 2.1 continuation theorem 14. Let X and Z be two Banach spaces. Suppose that L :
: X → Z is L -compact on Ω, where
DL ⊂ X → Z is a Fredholm operator with index zero and N
Ω is an open subset of X. Moreover, assume that all the following conditions are satisfied:
for all x ∈ ∂Ω ∩ DL, λ ∈ 0, 1;
1 Lx /
λNx,
∈
2 Nx
/ Im L, for all x ∈ ∂Ω ∩ Ker L;
3 the Brouwer degree
Ω ∩ Ker L, 0 /
deg QN,
0.
has at least one solution in dom L ∩ Ω.
Then equation Lx Nx
Our main result is given in the following theorem.
2.1
4
Abstract and Applied Analysis
Theorem 2.2. Suppose
Ci > 2Di ,
l
c1j
j1
a−11 γ1j− e
ln
a12
a−11
< 1,
2Bi
> Ai ,
Ai
2.2
i 1, 2,
l
c2j
j1
a−22 γ2j− e
a21
a−22
< 1.
2.3
Then 1.3 has a positive ω-periodic solution.
Proof. Set Nt N1 t, N2 tT and Ni t exi t i 1, 2. Then 1.3 can be rewritten as
x1 t −
a12 tex2 t−x1 t
a11 t
b11 t ex1 t
b12 t ex2 t
l
c1j tex1 t−τ1j t−x1 t−γ1j te
x1 t−τ1j t
: Δ1 x, t,
j1
x2 t
2.4
a21 tex1 t−x2 t
a22 t
−
b22 t ex2 t
b21 t ex1 t
l
c2j tex2 t−τ2j t−x2 t−γ2j te
x2 t−τ2j t
: Δ2 x, t.
j1
As usual, let X Z {x x1 t, x2 tT ∈ CR, R2 : xt ω xt for all t ∈ R} be Banach
spaces equipped with the supremum norm || · ||. For any x ∈ X, because of periodicity, it is
easy to see that Δx, · Δ1 x, ·, Δ2 x, ·T ∈ CR, R2 is ω-periodic. Let
T
L : DL x ∈ X : x ∈ C1 R, R2
x −→ x x1 , x2 ∈ Z,
P : X x −→
Q : Z z −→
1
ω
1
ω
ω
0
ω
1
x1 sds,
ω
z1 sds,
0
1
ω
ω
T
x2 sds
∈ X,
0
ω
T
z2 sds
∈ Z,
2.5
0
: X x −→ Δx, · ∈ Z.
N
It is easy to see that
Im L ω
xsds 0, 0T ,
x | x ∈ Z,
0
Im P Ker L,
Ker Q Im L.
Ker L R2 ,
2.6
Abstract and Applied Analysis
5
Thus, the operator L is a Fredholm operator with index zero. Furthermore, denoting
by L−1
P : Im L → DL ∩ Ker P the inverse of L|DL∩Ker P , we have
1
ω
L−1
P yt −
ω t
0
1
−
ω
ysds dt 0
t
ysds
0
ω t
t
1
y1 sds dt y1 sds, −
ω
0
0
0
ω t
0
y2 sds dt 0
t
2.7
T
y2 sds
.
0
It follows that
QNx
1
ω
ω
Nxtdt
0
L−1
P I − QNx 1
ω
ω
1
ω
ω
T
,
2.8
t ω
1 ω t
Nxsds
−
Nxsds −
Nxsds dt
ω 0
ω 0 0
0
1 ω t QNxsds dt.
ω 0 0
2.9
t
Δ1 xt, tdt,
0
Δ2 xt, tdt
0
are continuous. It is not difficult to show that L−1 I −QNΩ
and L−1 I −QN
Obviously, QN
P
P
is compact for any open bounded set Ω ⊂ X by using the Arzela-Ascoli theorem. Moreover,
is L-compact on Ω with any open bounded set Ω ⊂ X.
is clearly bounded. Thus N
QNΩ
λ ∈ 0, 1, we have
Considering the operator equation Lx λNx,
T
x t x1 t, x2 t λΔx, t λΔ1 x, t, λΔ2 x, tT .
2.10
Suppose that x x1 t, x2 tT ∈ X is a solution of 2.10 for some λ ∈ 0, 1.
Firstly, we claim that there exists a positive number H such that ||x|| < H. Integrating
the first equation of 2.10 and in view of x ∈ X, it results that
0
ω
0
x1 tdt
λ
ω
Δ1 x, tdt,
2.11
0
which together with 2.4 implies that
ω x2 t−x1 t l
x1 t−τ1j t
a
te
12
c1j tex1 t−τ1j t−x1 t−γ1j te
dt
x
t
2
b12 t e
0 j1
ω
0
a11 t
dt
b11 t ex1 t
0
a11 t
dt.
b11 t
ω
<
2.12
6
Abstract and Applied Analysis
Similarly, we have
ω x1 t−x2 t l
x2 t−τ2j t
a21 te
c2j tex2 t−τ2j t−x2 t−γ2j te
dt
b21 t ex1 t 0 j1
ω
0
a22 t
dt
b22 t ex2 t
0
a22 t
dt.
b22 t
ω
<
2.13
It follows from 2.12 and 2.13 that
ω
0
x tdt ≤ λ
1
ω x2 t−x1 t l
x1 t−τ1j t
a
te
12
c1j tex1 t−τ1j t−x1 t−γ1j te
dt
x
t
2
b12 t e
0 j1
λ
ω
a11 t
b t ex1 t dt
11
0
2.14
ω
a11 t
dt A1 ,
0 b11 t
ω ω
x1 t−x2 t l
x2 t−τ2j t
a
te
21
dt
x tdt ≤ λ c2j tex2 t−τ2j t−x2 t−γ2j te
2
x
t
1
b21 t e
0
0 j1
<2
ω
a22 t
dt
λ x2 t 0 b22 t e
ω
a22 t
<2
dt A2 .
0 b22 t
2.15
Since x ∈ X, there exist ξ1 , ξ2 , η1 , η2 ∈ 0, ω such that
xi ξi min xi t,
t∈0,ω
xi ηi max xi t,
t∈0,ω
xi ξi xi ηi 0,
i 1, 2.
It follows from 2.12 and 2.14 that
A1
2
ω
0
a11 t
dt >
b11 t
ω
0
a11 t
dt
b11 t ex1 t
ω ω
l
x t−τ t
a12 tex2 t−x1 t
x1 t−τ1j t−x1 t−γ1j te 1 1j
c1j te
dt dt
b12 t ex2 t
0 j1
0
2.16
Abstract and Applied Analysis
>e
7
x1 ξ1 −x1 η1 −γ1 ex1 η1 l ω
j1
x1 η1 B1 ex1 ξ1 −x1 η1 −γ1 e
c1j tdt
0
,
2.17
which implies that
x1 ξ1 < ln
A1
x1 η1 γ1 ex1 η1 .
2B1
2.18
Using 2.14 yields
ω
x1 t ≤ x1 ξ1 0
x tdt < ln A1 x1 η1 γ ex1 η1 A1 ,
1
1
2B1
t ∈ 0, ω.
2.19
In particular,
x1 η1 < x1 ξ1 ω
0
x tdt < ln A1 x1 η1 γ ex1 η1 A1 .
1
1
2B1
2.20
It follows that
x1 η1 > ln
2B1
1
.
− A1
ln
γ1
A1
2.21
Again from 2.14, we have
x1 t ≥ x1 η1 −
ω
0
1
2B
1
x tdt > ln
− A1 : H11 ,
− A1
ln
1
γ1
A1
t ∈ 0, ω.
2.22
t ∈ 0, ω.
2.23
Similarly, we can obtain
x2 t ≥ x2 η2 −
ω
0
x tdt > ln
2
1
2B2
−
A
ln
− A2 : H21 ,
2
γ2
A2
Since x1 ξ1 0, from 2.10, we have
l
x1 ξ1 −τ1j ξ1 a11 ξ1 c1j ξ1 ex1 ξ1 −τ1j ξ1 −x1 ξ1 −γ1j ξ1 e
x
ξ
1
1
b11 ξ1 e
j1
x2 ξ1 −x1 ξ1 a12 ξ1 e
.
b12 ξ1 ex2 ξ1 2.24
8
Abstract and Applied Analysis
Hence, from 2.24 and the fact that supu≥0 ue−u 1/e, we have
ex1 ξ1 ex1 ξ1 ≤
b11
ex1 ξ1 b11 ξ1 ex1 ξ1 l
x1 ξ1 −τ1j ξ1 c1j ξ1 γ1j ξ1 ex1 ξ1 −τ1j ξ1 e−γ1j ξ1 e
a ξ γ ξ j1 11 1 1j 1
a12 ξ1 a11 ξ1 1 b12 ξ1 e−x2 ξ1 <
l
c1j
j1
a−11 γ1j− e
a12
a−11
2.25
.
Noting that u/b11
u is strictly monotone increasing on 0, ∞ and
sup
u≥0
l
c1j
a12
u
1
>
,
b11
u
a− γ − e a−11
j1 11 1j
2.26
it is clear that there exists a constant k1 > 0 such that
l
c1j
a12
u
>
b11
u j1 a−11 γ1j− e a−11
∀u ∈ k1 , ∞.
2.27
In view of 2.25 and 2.27, we get
ex1 ξ1 ≤ k1 ,
2.28
x1 ξ1 ≤ ln k1 .
In the same way, there exists a constant k2 > 0 such that
2.29
x2 ξ2 ≤ ln k2 .
Again from 2.14, 2.15, 2.28, and 2.29, we get
x1 t ≤ x1 ξ1 ω
0
x2 t ≤ x2 ξ1 ω
0
x tdt < ln k1 A1 ,
1
x tdt < ln k1 A2 .
2.30
2
Then, we can choose two sufficiently large positive constants H12 > ln k1 A1 and H22 >
ln k2 A2 such that
x1 t < H12 ,
x2 t < H22 ,
ln b11
< H12 ,
ln b22
< H22 .
2.31
Abstract and Applied Analysis
9
Let H > max{|H11 |, |H21 |, H12 , H22 } be a fix constant such that
e
H
1
C1 − 2D1
> − H − ln
,
2B1
γ1
e
H
1
C2 − 2D2
> − H − ln
.
2B2
γ2
2.32
Then 2.22, 2.23, and 2.31 imply that ||x|| < H, if x ∈ X is solution of 2.10. So we can
define an open bounded set as Ω {x ∈ X : ||x|| < H} such that there is no λ ∈ 0, 1 and
That is to say Lx /
for all x ∈ ∂Ω ∩ DL, λ ∈ 0, 1.
x ∈ ∂Ω such that Lx λNx.
λNx
∈
Secondly, we prove that Nx
/ Im L for all x ∈ ∂Ω ∩ Ker L. That is QNx
1,
T
T
QNx2 /
0, 0 for all x ∈ ∂Ω ∩ Ker L.
If xt x1 t, x2 tT ∈ ∂Ω ∩ Ker L, then xt is a constant vector in R2 , and there
exists some i ∈ {1, 2} such that |xi | H. Assume |x1 | H, so that x1 ±H. Then, we claim
QNx
1
QNx
> 0 for x1 −H,
1
<0
for x1 H.
2.33
If QNx
1 ≤ 0 for x1 −H, it follows from 2.2 and 2.8 that
ω
Δ1 x, tdt ≤ 0,
for x1 −H.
2.34
0
Hence,
A1
2
ω
0
ω
a11 t
dt
b11 t
a11 t
dt
b
e−H
t
11
0
⎡
⎤
ω l
x2 H
a
te
−H
⎣ c1j te−γ1j te 12
⎦dt
≥
b12 t ex2
0
j1
>
ω l
−γ e−H
>
c1j te 1j dt
2.35
0 j1
−H
≥ e−γ1 e
l ω
j1
c1j tdt
0
−H
B1 e−γ1 e ,
which implies
−H > ln
2B1
1
ln
γ1
A1
> ln
1
2B1
− A1 H11 .
− A1
ln
γ1
A1
This is a contradiction and implies that QNx
1 > 0 for x1 −H.
2.36
10
Abstract and Applied Analysis
If QNx
1 ≥ 0 for x1 H, it follows from 2.2 and 2.8 that
ω
Δ1 x, tdt ≥ 0,
for x1 H,
0
C1 −H
e 2
ω
0
a11 t
dt
2eH
0
a11 t
dt
b11 t eH
ω
<
≤
ω l
c1j te
−γ1j teH
dt ω
0 j1
≤
0
ω l
c1j te
−γ1− eH
ω
dt 0 j1
<e
−γ1− eH
0
l ω
j1
c1j tdt 0
ω
0
a12 tex2 −H
dt
b12 t ex2
2.37
a12 t
dt
b12 teH−x2 eH
a12 t
dt
eH
− H
B1 e−γ1 e D1 e−H .
Consequently,
e
H
1
C1 − 2D1
< − H − ln
,
2B1
γ1
2.38
a contradiction to the choice of H. Thus, QNx
1 < 0 for x1 H.
Similarly, if |x2 | H, we obtain
QNx
2
> 0 for x2 −H,
QNx
2
<0
for x2 H.
2.39
∈
Consequently, 2.33 and 2.39 imply that Nx
/ Im L for all x ∈ ∂Ω ∩ Ker L.
Furthermore, let 0 ≤ μ ≤ 1 and define continuous function Hx, μ by setting
H x, μ − 1 − μ x μQNx.
2.40
For all xt x1 t, x2 tT ∈ ∂Ω ∩ Ker L, then there exists some i ∈ {1, 2} such that
|xi | H. There are two cases: x1 ±H or x2 ±H. When x1 H or x2 H, from 2.33 and
2.39, it is obvious that Hx, μ1 < 0 or Hx, μ2 < 0. Similarly, if x1 −H or x2 −H, it
0, 0T for all x ∈ ∂Ω ∩ ker L.
results that Hx, μ1 > 0 or Hx, μ2 > 0. Hence Hx, μ /
Finally, using the homotopy invariance theorem, we obtain
Ω ∩ ker L, 0, 0T deg −x, Ω ∩ ker L, 0, 0T deg QN,
/ 0.
2.41
Abstract and Applied Analysis
1.8
1.7
1.6
1.5
1.4
1.3
1.2
1.1
1
11
N1 (t)
0
10
20
30
40
50
60
70
80
90
50
60
70
80
90
a
3.4
3.2
3
2.8
2.6
2.4
2.2
2
N2 (t)
0
10
20
30
40
b
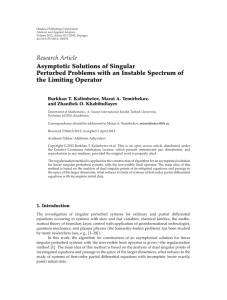
Figure 1: Numerical solution Nt N1 t, N2 tT of systems 3.1 for initial value ϕt ≡ 1, 2T .
has a solution
It then follows from the continuation theorem that Lx Nx
T
x∗ t x1∗ t, x2∗ t ∈ Dom L Ω,
2.42
∗
∗
which is an ω-periodic solution to 2.4. Therefore N ∗ t N1∗ t, N2∗ tT ex1 t , ex2 t T is
a positive ω-periodic solution of 1.3 and the proof is complete.
3. An Example
In this section, we give an example to demonstrate the results obtained in the previous
section.
Example 3.1. Consider the following Nicholson-type delay system with nonlinear densitydependent mortality terms:
2 cos tN2 t
5 sin tN1 t
5 sin t N1 t 2 cos t N2 t
cos t
4π| sin t|
4π
N1 t−|2cos t|
1
e
N1 t − |2 cos t|e−e
4
sin t
4π| cos t|
4π
N1 t−|2sin t|
N1 t − |2 sin t|e−e
e
,
1
4
N1 t −
N2 t −
2 sin tN1 t
5 cos tN2 t
5 cos t N2 t 2 sin t N1 t
12
Abstract and Applied Analysis
sin t
4π| cos t|
N2 t−|2sin t|
e4π 1 N2 t − |2 sin t|e−e
4
cos t
4π| sin t|
N2 t−|2cos t|
N2 t − |2 cos t|e−e
e4π 1 .
4
3.1
Obviously, Ai 4π, Bi 4πe4π , Ci 10π, Di 4π i 1, 2, cij 5/4e4π , γij− e4π i, j 1, 2, a12 a21 3, a−11 a−22 4, then
ln
2Bi
ln 2 4π > 4π Ai ,
Ai
l
c1j
a− γ − e
j1 11 1j
l
c2j
a− γ − e
j1 22 2j
a12
a−11
a21
a−22
Ci 10π > 8π 2Di ,
3
5
≈ 0.9799 < 1,
8e 4
3
5
≈ 0.9799 < 1,
8e 4
i 1, 2,
3.2
which means the conditions in Theorem 2.2 hold. Hence, the model 3.1 has a positive 2πperiodic solution in Ω, where Ω {x ∈ X : ||x|| < 10000}. The fact is verified by the numerical
simulation in Figure 1.
Remark 3.2. Equation 3.1 is a form of Nicholson’s blowflies delayed systems with nonlinear
density-dependent mortality terms, but as far as we know there are no that results can be
applicable to 3.1 to obtain the existence of positive 2π-periodic solutions. This implies the
results of this paper are essentially new.
Acknowledgments
The authors would like to express the sincere appreciation to the reviewers for their
helpful comments in improving the presentation and quality of the paper. In particular,
the authors expresses the sincere gratitude to Prof. Bingwen Liu for the helpful discussion
when this work is carried out. This work was supported by National Natural Science
Foundation of China Grant nos. 11201184 and 11101283, Innovation Program of Shanghai
Municipal Education Commission Grant no. 13YZ127, the Natural Scientific Research
Fund of Zhejiang Provincial of China Grant nos. Y6110436, LY12A01018, and the Natural
Scientific Research Fund of Zhejiang Provincial Education Department of China Grant no.
Z201122436.
References
1 M. de la Sen and N. Luo, “On the uniform exponential stability of a wide class of linear time-delay
systems,” Journal of Mathematical Analysis and Applications, vol. 289, no. 2, pp. 456–476, 2004.
2 M. de la Sen, “Stability of impulsive time-varying systems and compactness of the operators mapping
the input space into the state and output spaces,” Journal of Mathematical Analysis and Applications, vol.
321, no. 2, pp. 621–650, 2006.
Abstract and Applied Analysis
13
3 H. Lu and W. Wang, “Dynamics of a nonautonomous Leslie-Gower type food chain model with
delays,” Discrete Dynamics in Nature and Society, vol. 2011, Article ID 380279, 19 pages, 2011.
4 X. Fan, Z. Wang, and F. Jiang, “Dynamics of mutualism-competition-predator system with
Beddington-DeAngelis functional responses and impulsive perturbations,” Abstract and Applied
Analysis, vol. 2012, Article ID 963486, 33 pages, 2012.
5 L. Berezansky, E. Braverman, and L. Idels, “Nicholson’s blowflies differential equations revisited:
main results and open problems,” Applied Mathematical Modelling, vol. 34, no. 6, pp. 1405–1417, 2010.
6 L. Berezansky, L. Idels, and L. Troib, “Global dynamics of Nicholson-type delay systems with
applications,” Nonlinear Analysis: Real World Applications, vol. 12, no. 1, pp. 436–445, 2011.
7 W. Wang, L. Wang, and W. Chen, “Existence and exponential stability of positive almost periodic
solution for Nicholson-type delay systems,” Nonlinear Analysis: Real World Applications, vol. 12, no. 4,
pp. 1938–1949, 2011.
8 B. Liu, “The existence and uniqueness of positive periodic solutions of Nicholson-type delay
systems,” Nonlinear Analysis: Real World Applications, vol. 12, no. 6, pp. 3145–3151, 2011.
9 B. Liu and S. Gong, “Permanence for Nicholson-type delay systems with nonlinear densitydependent mortality terms,” Nonlinear Analysis: Real World Applications, vol. 12, no. 4, pp. 1931–1937,
2011.
10 W. Wang, “Positive periodic solutions of delayed Nicholson’s blowflies models with a nonlinear
density-dependent mortality term,” Applied Mathematical Modelling, vol. 36, no. 10, pp. 4708–4713,
2012.
11 X. Hou and L. Duan, “New results on periodic solutions of delayed Nicholson’s blowflies models,”
Electronic Journal of Qualitative Theory of Differential Equations, no. 24, pp. 1–11, 2012.
12 X. Hou, L. Duan, and Z. Huang, “Permanence and periodic solutions for a class of delay Nicholson’s
blowflies models,” Applied Mathematical Modelling, vol. 37, pp. 1537–1544, 2013.
13 Z. Chen, “Periodic solutions for Nicholson-type delay system with nonlinear density-dependent
mortalityterms,” Electronic Journal of Qualitative Theory of Differential Equations, vol. 56, pp. 1–9, 2012.
14 R. E. Gaines and J. L. Mawhin, Coincidence Degree, and Nonlinear Differential Equations, vol. 568 of
Lecture Notes in Mathematics, Springer, Berlin, Germany, 1977.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014