Document 10821908
advertisement

Hindawi Publishing Corporation
Abstract and Applied Analysis
Volume 2011, Article ID 203453, 22 pages
doi:10.1155/2011/203453
Research Article
Subdivision Depth Computation for Tensor Product
n-Ary Volumetric Models
Ghulam Mustafa and Muhammad Sadiq Hashmi
Department of Mathematics, The Islamia University of Bahawalpur, Bahawalpur 63100, Pakistan
Correspondence should be addressed to Ghulam Mustafa, mustafa rakib@yahoo.com
Received 22 October 2010; Revised 27 January 2011; Accepted 28 February 2011
Academic Editor: Yoshikazu Giga
Copyright q 2011 G. Mustafa and M. S. Hashmi. This is an open access article distributed under
the Creative Commons Attribution License, which permits unrestricted use, distribution, and
reproduction in any medium, provided the original work is properly cited.
We offer computational formula of subdivision depth for tensor product n-ary n 2 volumetric
models based on error bound evaluation technique. This formula provides and error control tool
in subdivision schemes over regular hexahedron lattice in higher-dimensional spaces. Moreover,
the error bounds of Mustafa et al. 2006 are special cases of our bounds.
1. Introduction
Subdivision is a simple and elegant method to describe smooth curves and surfaces. The
approach of subdivision schemes is simple and efficient due to its mathematical formulation.
Its application ranges from industrial design and animation to scientific visualization and
simulation. Due to this, subdivision method is becoming a standard technique and now wellunderstood by both academic and industrial communities. It is an algorithm to generate
smooth curves and surfaces as a sequence of successively refined control polygons. At each
subdivision level, the subdivision scheme describe the source grid maps to the subdivided
grid, which results in increase in the number of points. The number of points inserted at
level k 1 between two consecutive points from level k is called arity of the scheme. In the
case when number of points inserted are 2, 3, . . . , n the subdivision schemes are called binary,
ternary, . . ., n-ary, respectively. For more details on n-ary subdivision schemes, we may refer
to 1–4 thesis of Aspert 5 and Ko 6.
However tensor product trivariate schemes obtained from above schemes have been
proven themselves an excellent tool for the modeling of largely regular volumetric/solid
models over hexahedron lattice, for example, manufacturing of industrial regular block,
font animation and garment pressures for the biomechanical design of functional apparel
products, and so forth.
2
Abstract and Applied Analysis
Although subdivision has many attractive advantages for modeling purposes, it has
received far less attention in volumetric modeling. One of the reason is the topological complexity of domain meshes in higher-dimensional spaces. Another reason is lack of proper
mathematical tools for extraordinary analysis. Even so, it is clear that subdivision is slowly
gaining interest in solid modeling community. MacCracken and Joy 7 proposed a tensor
product extension of the Catmull-Clark scheme in the volumetric setting over hexahedron
lattice. Later on, Bajaj et al. 8 further extended the scheme with the analysis based on
numerical experiments. In 2004, McDonnell et al. 9 present a volumetric subdivision scheme
for interpolation of arbitrary hexahedral meshes. Mustafa and Liu 10 present subdivision
scheme which exhibits control over shrink-age/size of volumetric models in 2005. The
method here presented is much simpler and easier as compared to MacCracken and Joy 7.
Cheng and Yong 11 proposed subdivision scheme based on nonhexahedron lattice. Wang et
al. 12 gave the application of the volumetric subdivision scheme in the simulation of elastic
human body deformation and garment pressure.
Subdivision schemes have become important in recent years because they provide a
precise and efficient way to describe smooth curves/surfaces/volumetric models, however
the little have been done in the area of error control for tensor product n-ary volumetric
models. The investigation of error control for volumetric models arises two questions in
mind.
i How well the regular hexahedron lattice approximate to the limit volumetric model?
ii How many subdivision steps are needed to satisfy a user-specified error tolerance?
For given error tolerance, the subdivision levels performed on the initial control polygon,
so that the error/distance between the resulting control polygon and the limit volumetric
models would be less than the error tolerance is called subdivision depth.
A subdivision depth and error bound based on forward differences of control points
have been presented by 11, 13–18, while the methods 19–22 are based on eigenanalysis.
But nothing in this area has been done for more general tensor product n-ary volumetric
models yet. In this paper, we will answer-above-said questions and present a subdivision
depth computation technique based on error bounds for tensor product n-ary volumetric
models.
It is notified that the increase in arity offers greater freedom than offered by low
arity subdivision volumetric scheme in term of coefficients. Higher arity volumetric schemes
allow a range of different behaviors than the lower arity volumetric schemes. Ko 6
notified that subdivision curves/surfaces with higher arity results in higher smoothness
and approximation order but smaller in support, which make it more practical in use. It
is also noticed that higher arity volumetric models have slightly lower computational cost
than lower arity volumetric models. This discussion motivate us to calculate error bound and
depth for higher arity subdivision volumetric models, that is, in general for tensor product
n-ary subdivision volumetric models. Our method is generalization of Mustafa et al. 13, 15–
17. The paper is arranged as follows.
Section 2 is devoted for basic definitions and notations. In Section 3, we have
computed subdivision depth for tensor product n-ary volumetric models. Section 4 presents
applications of our results for tensor product n-ary volumetric models. Conclusion and future
research directions are given in Section 5. The typical mathematical proofs are placed in
Appendices A and B for improved presentation of the paper.
Abstract and Applied Analysis
k1
P2i2
k1
P2i1
3
k1
P3i2
k1
P2i3
k
Pi1
k
k1
Pi2
P2i4
k1
P3i4
k
Pi1
k1
P3i1
P2ik1 Pik
k1
P3i3
P k1
k1 4i3
P4i2
k1
P3i5
P3ik1 Pik
k
Pi1
k1
P4i1
k
k1
Pi2
P3i6
a
k1
P4i4
P4ik1 Pik
b
k1
P4i5
k1
P4i6
k1
P4i7
k
k1
Pi2
P4i8
c
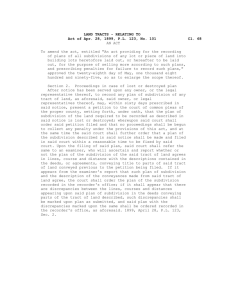
Figure 1: Solid lines show coarse polygons whereas doted lines are refined polygons. a–c represent
binary, ternary, and quaternary refinement of coarse polygon of scheme 2.1 for n 2, 3, 4, respectively.
2. Preliminaries
In this section, first we list all the basic facts about subdivision curve, surface and volumetric
models needed in this paper. Then we settle some notations for fair reading and better
understanding of Section 3.
2.1. Concepts
2.1.1. n-Ary Subdivision Curve
Given a sequence of control points pik ∈ N , i ∈ , N
2, where the upper index k
indicates the subdivision level, an n-ary subdivision curve 5 is defined by
k1
pniα
m
k
aα,j pij
,
α
0, 1, . . . , n − 1,
0
2.1
j 0
where m > 0 and
m
aα,j
1,
α
0, 1, . . . , n − 1.
2.2
j 0
0, 1, . . . , n − 1}m
The set of coefficients {aα,j , α
j 0 is called subdivision mask. Given initial
0
N
values pi ∈
, i ∈ , then in the limit k → ∞, the process 2.1 defines an infinite set of
points in N . The sequence of control points {pik } is related, in a natural way, with the dyadic
k1
i/nk , i ∈ . The process then defines a scheme whereby pniα
replaces the
mesh points tki
k
k1
k1
value piα/n for α ∈ {0, n}. Here pniα is inserted at the mesh point tniα 1/nn−αtki αtki1 for α
0, 1, . . . , n. Labelling of old and new points is shown in Figure 1 which illustrates
subdivision scheme 2.1.
2.1.2. Tensor Product n-Ary Subdivision Surface
k
Given a sequence of control points pi,j
∈ N , i, j ∈ , N
2, where the upper index k
0
indicates the subdivision level, a tensor product n-ary surface is a tensor product of 2.1
defined by
k1
pniα,njβ
m m
k
aα,r aβ,s pir,js
,
r 0 s 0
α, β
0, 1, . . . , n − 1,
2.3
4
Abstract and Applied Analysis
k1
P2i,2j2
k1
P2i1,2j2
k
Pi,j1
k
Pi1,j1
k1
P2i,2j1
k1
k1
P3i1,3j3
P3i2,3j3
k
Pi,j1
k1
P3i3,3j3
k
Pi1,j1
k1
P3i,3j2
k1
P3i3,3j2
k1
P3i,3j1
k1
P3i3,3j1
k1
P2i2,2j1
k
P2i1,2j1
k
Pi1,j
k
Pi,j
k1
P2i,2j
k1
P3i,3j3
k1
P2i2,2j2
k1
P2i1,2j
k
Pi1,j
k
Pi,j
k1
P3i,3j
k1
P2i2,2j
k1
P3i1,3j
a
k1
P3i2,3j
k1
P3i3,3j
b
k1
P4i,4j4
k1
P4i2,4j4
k
Pi,j1
k1
P4i4,4j4
k
Pi1,j1
k1
P4i,4j2
k1
P4i4,4j2
k
Pi1,j
k
Pi,j
k1
P4i,4j
k1
P4i2,4j
k1
P4i4,4j
c
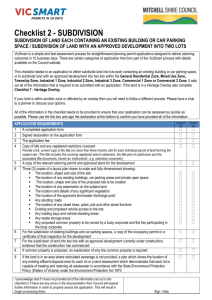
Figure 2: Solid lines show one face of coarse polygons whereas doted lines are refined polygons. a–c
can be obtain by subdividing one face into four, nine and sixteen new faces by using 2.3 for n 2, 3, 4
i.e., binary, ternary and quaternary, respectively.
0
where aα,r satisfies 2.2. Given initial values pi,j
∈ N , i, j ∈ , then in the limit k → ∞, the
k
process 2.3 defines an infinite set of points in . The sequence of values {pi,j
} is related,
in a natural way, with the dyadic mesh points i/nk , j/nk , i, j ∈ . The process then defines
k1
k
replaces the values piα/n,jβ/n
for α, β ∈ {0, n}. Here the values
a scheme whereby pniα,njβ
k1
pniα,njβ
are inserted at the mesh points ni α/nk1 , nj β/nk1 for α, β
0, 1, . . . , n.
Labelling of old and new points is shown in Figure 2 which illustrates subdivision scheme
2.3.
2.1.3. Tensor Product n-Ary Volumetric Model
k
Given a sequence of control points pi,j,l
∈ N , i, j, l ∈ , N 2, where the upper index k 0
indicates the subdivision level, a tensor product n-ary volumetric model is tensor product of
2.3 defined by
k1
pniα,njβ,nlγ
m m m
k
aα,r aβ,s aγ,t pir,js,lt
,
α, β, γ
0, 1, . . . , n − 1,
2.4
r 0 s 0 t 0
0
where aα,r satisfies 2.2. Given initial values pi,j,l
∈ N , i, j, l ∈ , then in the limit k → ∞, the
process 2.4 defines an infinite set of points in . The sequence of values {pk } is related,
i,j,l
Abstract and Applied Analysis
k1
P2i,2j2,2l2
5
k1
P3i,3j3,3l3
k1
P2i2,2j2,2l2
k1
P2i,2j,2l2
k1
P3i3,3j3,3l3
k1
P3i,3j,3l3
k1
P2i1,2j,2l1
k1
P3i,3j,3l2
k1
P2i,2j,2l1
k1
P3i,3j,3l1
k1
P2i2,2j2l
k1
P2i,2j,2l
k1
P2i1,2j,2l
k1
P3i,3j,3l
k1
P2i2,2j,2l
k1
P3i3,3j3,3l
k1
k1
k1
P3i1,3j,3l
P3i2,3j,3l
P3i3,3j,3l
a
b
k1
P4i,4j4,4l4
k1
P4i4,4j4,4l4
k1
P4i,4j,4l4
k1
P4i,4j,4l2
k1
P4i4,4j4,4l
k1
P4i,4j,4l
k1
P4i2,4j,4l
k1
P4i4,4j,4l
c
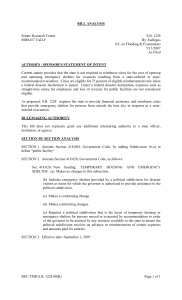
Figure 3: Solid lines show one cube of coarse polygons whereas doted lines are refined polygons. a–c
2, 3, 4,
can be obtain by subdividing one cube into 23 , 33 , and 43 new cubes by using 2.4 for n
respectively.
in a natural way, with the dyadic mesh points i/nk , j/nk , l/nk , i, j, l ∈ . The process then
k1
k
defines a scheme whereby pniα,njβ,nlγ
replaces the values piα/n,jβ/n,lγ
for α, β, γ ∈ {0, n}.
/n
k1
Here the values pniα,njβ,nlγ
are inserted at the mesh points ni α/nk1 , nj β/nk1 , nl γ /nk1 for α, β, γ 0, 1, . . . , n. Labelling of old and new points is shown in Figure 3 which
illustrates subdivision scheme 2.4.
2.1.4. Subdivision Depth
Given control polygon of tensor product n-ary volumetric model and an error tolerance ,
if we subdivide control polygon k times so that the error between resulting polygon and
volumetric model is smaller than , then k is called subdivision depth of tensor product nary volumetric model with respect to .
2.2. Notations
Here, we assume
δ
m m m
aα,r aβ,s bγ,t , α, β, γ
max α,β,γ r 0 s 0 t 0
0, 1, . . . , n − 1 ,
2.5
6
Abstract and Applied Analysis
where
j
bγ,j
aγ,t − aγ 1,t ,
γ
0, 1, . . . , n − 2,
t 0
bn−1,j
a0,j
n−2
− bγ,j .
2.6
γ 0
0, 1, . . . , n − 1,
Suppose further for α, β, γ
k
Mα,β,γ
k1
pniα,njβ,nlγ
−
k
1
n − α n − β n − γ pi,j,l
3
n
k
k
α n − β n − γ pi1,j,l
βn − α n − γ pi,j1,l
2.7
k
k
k
γ n − α n − β pi,j,l1
αβ n − γ pi1,j1,l
αγ n − β pi1,j,l1
k
k
βγ n − αpi,j1,l1
αβγ pi1,j1,l1
.
Δki,j,l,1
k
k
pi1,j,l
− pi,j,l
,
Δki,j,l,5
k
k
pi1,j,l1
− pi,j,l1
,
Δki,j,l,2
k
k
pi,j1,l
− pi,j,l
,
Δki,j,l,6
k
k
pi,j1,l1
− pi,j,l1
,
Δki,j,l,3
k
k
pi,j,l1
− pi,j,l
,
Δki,j,l,4
χ
1
ηα,β,γ
i,j,l
2.8
k
k
pi1,j1,l
− pi,j1,l
,
max maxΔ0i,j,l,t, t
t
k
k
pi1,j1,l1
− pi,j1,l1
,
0, 1, . . . , 7 ,
2.9
m
m−1
α n − β n − γ a
a
a
aβ,0 aγ,0 aα,t −
,
β,0
γ,0
α,s
3
n
t 1
s 1
2.10
m
m m−1
β n − γ a
a
a
aγ,0 aβ,t −
,
γ,0
α,r
β,s
2
n
t 1
r 0s 1
2.11
m
m m m−1
γ aα,r aβ,t aγ,s ,
aγ,t − t 1
n r 0 t 0 s 1
2.12
m
m m m−1
αβ n − γ aα,s aβ,t −
a
a
a
aγ,0
,
γ,0
β,t
α,s
3
n
s 1 t 1
t 1 s 1
2.13
2
ηα,β,γ
3
ηα,β,γ
4
ηα,β,γ
Δki,j,l,7
Abstract and Applied Analysis
m m m−1
m
αγ n − β 5
ηα,β,γ aβ,0
aα,s aγ,t −
a
a
a
,
β,0
γ,t
α,s
3
n
s 1 t 1
t 1 s 1
2.14
m m
m m m−1
βγ aβ,s aγ,t − 2 aγ,t aα,r aβ,s ,
s 1 t 1
n t 1 r 0 s 1
2.15
m m m
m m m−1
αβγ aα,r aβ,s aγ,t − 3 aβ,r aγ,t aα,s ,
r 1 s 1 t 1
n r 1 t 1 s 1
2.16
6
ηα,β,γ
7
ηα,β,γ
7
where
m
α
aα,t − ,
n
t 1
aα,0
m
aα,j
aα,t ,
j
0, 1, . . . , n − 1,
α
2.17
1, α
0, 1, . . . , n − 1.
t j1
Furthermore, suppose
ϑ
7 t
max χ
ηα,β,γ
, α, β, γ
α,β,γ
0, 1, . . . , n − 1 .
2.18
t 1
3. Depth for Tensor Product n-Ary Volumetric Models
In this paragraph, we compute subdivision depth for tensor product n-ary volumetric model.
Moreover, we show that error bound for binary subdivision volumetric models 17 is special
case of our bound. Here we need following lemmas for Theorem 3.5. The proof of first two
lemmas are shown in Appendices A and B, respectively.
0
Lemma 3.1. Given initial control polygon pi,j,l
recursively by 2.4 together with 2.2, then
k
pi,j,l , i, j, l ∈ , let the values pi,j,l
,k
maxΔki,j,l,t δk maxΔ0i,j,l,t,
i,j,l
where δ and Δki,j,l,t, t
i,j,l
1 be defined
3.1
1, 2, . . . , 7, are defined by 2.5 and 2.8, respectively.
0
Lemma 3.2. Given initial control polygon pi,j,l
recursively by 2.4 together with 2.2, then
k
Mα,β,γ
k
pi,j,l , i, j, l ∈ , let the values pi,j,l
,k
χδk
7 t
ηα,β,γ
,
1 be defined
3.2
t 1
k
t
where δ, Mα,β,γ
, χ, ηα,β,γ
for α, β, γ
respectively.
0, 1, . . . , n − 1 are defined by 2.5, 2.7, 2.9–2.16,
8
Abstract and Applied Analysis
k
pi,j,l , i, j, l ∈ , let the values pi,j,l
,k
0
Lemma 3.3. Given initial control polygon pi,j,l
1 be defined
recursively by 2.4 together with 2.2. Suppose P is the piecewise linear interpolant to the values
k
and P ∞ is the limit volumetric model of 2.4. If δ < 1, then error bound between tensor product
pi,j,l
n-ary volumetric model and its control polygon after k-fold subdivision is
k
k
P − P ∞ ∞
ϑ
δk
1−δ
,
3.3
where δ and ϑ are defined by 2.5 and 2.18, respectively.
Proof. Let · ∞ denote the uniform norm. Since the maximum difference between P k1 and
P k is attained at a point on the k 1th mesh, we have
k1
− P k
P
∞
max
α,β,γ
k
Mα,β,γ
, α, β, γ
0, 1, . . . , n − 1 ,
3.4
k
is defined by 2.7. By 3.2 and 3.4, we get
where Mα,β,γ
k1
− P k
P
∞
ϑδk ,
3.5
where δ and ϑ are defined by 2.5 and 2.18, respectively.
By triangle inequality we get 3.3. This completes the proof.
Remark 3.4. Theorem 3.10 in 17 is designed to estimate error bound for binary subdivision
volumetric model i.e., each cube is divided in 8 subcubes. But for the higher arity
subdivision schemes such as for n
3, 4, 5, . . . when each cube is divided in 33 , 43 , 53 , . . .
subcubes error estimates are not feasible by existing result. So estimation of error bounds for
tensor product n-ary volumetric model is quite necessary. Our Lemma 3.3 provides freedom
to evaluate error bound for all arities. Here we also mention that Lemma 3.3 for n 2 reduces
to 17, Theorem 3.10.
Now we offer the computational formula of subdivision depth for tensor product nary volumetric model.
Theorem 3.5. Let k be subdivision depth, and let dk be the error bound between tensor product n-ary
volumetric model P ∞ and its k-level control polygon P k . For arbitrary > 0, if
k
logδ−1
ϑ
,
1 − δ
3.6
then
dk
.
3.7
Abstract and Applied Analysis
9
Proof. From 3.3, we have
d
k
P − P ∞ k
ϑ
∞
δk
1−δ
3.8
.
This implies, for arbitrary given > 0, when subdivision depth k satisfies the following
inequality:
ϑ
,
3.9
k logδ−1
1 − δ
then
dk
.
3.10
This completes the proof.
4. Applications
4.1. Error Bound and Subdivision Depth of Tensor Product n-Ary
Interpolating Volumetric Models
In this section, we estimate the error bound and subdivision depth of 2b 2-point tensor
product n-ary interpolating volumetric models. By taking the tensor product of 2b 2-point
n-ary scheme of 4, we get the following:
k1
pni,nj,nl
k1
pnis
1 ,nj,nl
k1
pni,njs
2 ,nl
k1
pni,nj,nls
3
k1
pnis
1 ,njs2 ,nl
k1
pnis
1 ,nj,nls3
k1
pni,njs
2 ,nls3
k1
pnis
1 ,njs2 ,nls3
k
pi,j,l
,
b1
t1 −b
k
s 1 ,t1 pt1 i,j,l ,
k
s 2 ,t2 pi,t2 j,l ,
k
s 3 ,t3 pi,j,t3 l ,
b1
t2 −b
b1
t3 −b
b1 b1
s 1 ,t1 s 1 ,t1 s 2 ,t2 t1 −b t2 −b
b1 b1
t1 −b t3 −b
b1 b1
t2 −b t3 −b
b1 b1 b1
t1 −b t2 −b t3 −b
4.1
s ,t ptk i,t j,l ,
2 2
1
2
s ,t ptk i,j,t l ,
3 3
1
3
s ,t pi,tk j,t l ,
3 3
2
3
s ,t s ,t ptk i,t j,t l ,
s 1 ,t1 2 2
3 3
1
2
3
10
Abstract and Applied Analysis
Table 1: Error bound of tensor product n-ary interpolating volumetric models: here n presents the arity of
subdivision volumetric model and k presents the subdivision level.
n\k
2
3
4
5
6
1
0.518750
0.291564
0.204557
0.157880
0.128647
2
0.259375
0.097188
0.051139
0.031576
0.021441
3
0.129688
0.032396
0.012785
0.006315
0.003574
4
0.064844
0.010799
0.003196
0.001263
0.000596
5
0.032422
0.003600
0.000799
0.000253
0.000099
6
0.016211
0.001200
0.000200
0.000051
0.000017
7
0.008105
0.000400
0.000050
0.000010
0.000003
Table 2: Subdivision depth of tensor product n-ary interpolating volumetric models: here n presents the
arity of subdivision volumetric model and presents error tolerance.
n\
2
3
4
5
6
0.518750
1
1
1
1
1
0.259375
2
2
1
1
1
0.129688
3
2
2
2
1
0.064844
4
3
2
2
2
0.032422
5
3
3
2
2
0.016211
6
4
3
3
3
0.008105
7
5
4
3
3
where
x,y
b1
m −b x − nm
b−1−y
2b1 x − ny −1
n
,
by ! b−y1 !
4.2
s1 , s2 , s3
1, 2, . . . , n − 1, b
1, 2, 3, . . . and n stands for n-ary interpolating subdivision
volumetric model, that is, n
2, 3, 4, . . . stands for binary, ternary, quaternary and so on,
respectively.
The error bounds and subdivision depth of 4.1 are shown in Tables 1 and 2,
respectively. In these tables, we have shown the error bounds and depth of different arity
interpolating subdivision volumetric models by using Lemma 3.3 and Theorem 3.5 with
χ 0.1.
4.2. Error Bound and Subdivision Depth of Tensor Product n-Ary
Approximating Volumetric Models
In this section, we estimate the error bound and subdivision depth of tensor product 2b 2point n-ary approximating volumetric models. By taking the tensor product of 2b 2-point
n-ary scheme of 4, we get the following:
k1
pnis
1 ,njs2 ,nls3
b1 b1 b1
t1 −b t2 −b t3 −b
s 1 ,t1 s 2 ,t2 s 3 ,t3 ptk1 i,t2 j,t3 l ,
4.3
Abstract and Applied Analysis
11
Table 3: Error bound of tensor product n-ary approximating volumetric models: here n presents the arity
of subdivision volumetric model and k presents the subdivision level.
n\k
2
3
4
5
6
1
0.623965
0.327391
0.222742
0.168908
0.136057
2
0.311982
0.109130
0.055686
0.033782
0.022676
3
0.155991
0.036377
0.013921
0.006756
0.003779
4
0.077996
0.012126
0.003480
0.001351
0.000630
5
0.038998
0.004042
0.000870
0.000270
0.000105
6
0.019499
0.001347
0.000218
0.000054
0.000017
7
0.009749
0.000449
0.000054
0.000011
0.000003
Table 4: Subdivision depth of tensor product n-ary approximating volumetric models: here n presents the
arity of subdivision volumetric model and presents error tolerance.
n\
2
3
4
5
6
0.623965
1
1
1
1
1
0.311982
2
2
1
1
1
0.155991
3
2
2
2
1
0.077996
4
3
2
2
2
0.038998
5
3
3
2
2
0.019499
6
4
3
3
3
0.009749
7
5
4
3
3
where
x,y
b1
1 − 2nm
2n2b1 b y ! b − y 1 !
m −b 2x
b−1−y
2x 1 − 2ny −1
,
4.4
s1 , s2 , s3
1, 2, . . . , n − 1, b
1, 2, 3, . . ., and n stands for n-ary approximating subdivision
volumetric model, that is, n
2, 3, 4, . . . stands for binary, ternary, quaternary, and so on,
respectively.
The error bounds and subdivision depth of 4.3 are shown in Tables 3 and 4,
respectively. In these tables, we have shown the error bounds and depth of different arity
approximating subdivision volumetric by using Lemma 3.3 and Theorem 3.5 with χ 0.1.
5. Conclusion and Future Work
We have computed subdivision depth based on error bounds for tensor product n-ary
volumetric models. Furthermore, we have shown that error bounds for binary subdivision
volumetric model 17 is special case of our bounds. It is noticed that the increase in arity
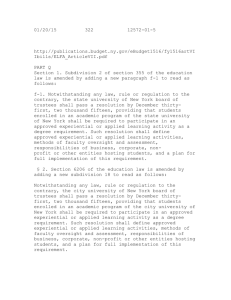
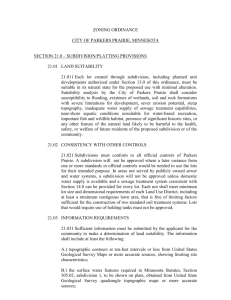
results gradually decrease in error, which is shown in Tables 1, 3 and graphically in Figure 4.
It is noticed from Tables 2 and 4 that higher arity subdivision volumetric models need less
number of subdivision steps than lower arity to satisfy user-specified error tolerance.
The authors are looking, as a future work, to extend the computational techniques
of subdivision depth for n-ary arbitrary subdivision volumetric models over rectangular/triangular hexahedron lattice. we will discuss them elsewhere.
12
Abstract and Applied Analysis
0.5
0.6
0.5
0.4
0.4
0.3
∈
∈
0.3
0.2
0.2
0.1
0.1
0
0
1
2
3
4
5
6
7
1
2
3
4
k
n
n
n
2
3
4
5
6
7
k
n
n
5
6
n
n
n
a
2
3
4
n
n
5
6
b
Figure 4: a Presents comparison among the error bounds of different arity subdivision volumetric
models 4.1, that is, for n
2, 3, 4, 5, 6; b presents comparison among the error bounds of different
arity subdivision volumetric models 4.3, that is, for n 2, 3, 4, 5, 6. Here k presents subdivision level, n
presents the arity and presents the user-specified error tolerance.
Appendices
A. Proof of Lemma 3.1
Proof. From 2.2, 2.4 for α, β, γ
0, 1, . . . , n − 1, we obtain
k
k
− pniα,njβ,nlγ
pniα1,njβ,nlγ
m m
m
k−1
k−1
aβ,s aγ,t
bα,r pir1,js,lγ − pir,js,lγ
,
s 0 t 0
r 0
k
k
− pniα,njβ,nlγ
pniα,njβ1,nlγ
m
m m
k−1
k−1
,
aα,r aγ,t
bβ,s pir,js1,lt − pir,js,lt
r 0 t 0
A.3
s 0
k
k
− pnin,njβ,nln
pnin,njβ1,nln
m m
m
k−1
k−1
,
a0,r a0,t
bβ,s pir1,js1,lt1 − pir1,js,lt1
r 0 t 0
A.2
s 0
k
k
pnin,njβ1,nlγ
− pnin,njβ,nlγ
m m
m
k−1
k−1
a0,r aγ,t
bβ,s pir1,js1,lt − pir1,js,lt
,
r 0 t 0
A.1
s 0
A.4
Abstract and Applied Analysis
13
k
k
pniα,njβ,nlγ
1 − pniα,njβ,nlγ
m m
aα,r aβ,s
r 0 s 0
m
k−1
k−1
,
bγ,t pir,js,lt1 − pir,js,lt
A.5
t 0
k
k
pnin,njβ,nlγ
1 − pnin,njβ,nlγ
m m
m
a0,r aβ,s
r 0 s 0
k−1
k−1
,
bγ,t pir1,js,lt1 − pir1,js,lt
A.6
t 0
k
k
pniα,njn,nlγ
1 − pniα,njn,nlγ
m m
aα,r a0,s
m
r 0 s 0
k−1
bγ,t pir,js1,lt1
−
k−1
pir,js1,lt
A.7
,
t 0
k
k
pnin,njn,nlγ
1 − pnin,njn,nlγ
m m
a0,r a0,s
m
r 0 s 0
k−1
bγ,t pir1,js1,lt1
−
k−1
pir1,js1,lt
A.8
,
t 0
k
k
pniα1,njn,nlγ
− pniα,njn,nlγ
m m
a0,s aγ,t
m
k−1
k−1
,
bα,r pir1,js1,lt − pir,js1,lt
s 0 t 0
A.9
r 0
k
k
pniα1,njβ,nln
− pniα,njβ,nln
m m
aβ,s a0,t
m
k−1
k−1
bα,r pir1,js,lt1 − pir,js,lt1
,
s 0 t 0
A.10
r 0
k
k
pniα,njβ1,nln
− pniα,njβ,nln
m m
aα,r a0,t
r 0 t 0
m
k−1
k−1
,
bβ,s pir,js1,lt1 − pir,js,lt1
A.11
s 0
k
k
pniα1,njn,nln
− pniα,njn,nln
m m
m
k−1
k−1
,
a0,s a0,t
bα,r pir1,js1,lt1 − pir,js1,lt1
s 0 t 0
A.12
r 0
where bγ,r is defined by 2.6 and α, β, γ 0, 1, . . . , n − 1.
Now using A.1 recursively together with notations defined by 2.8, we get
maxΔki,j,l,1 i,j,l
k
m m m
max
aβ,t aα,s bγ,r maxΔ0i,j,l,1.
α,β,γ i,j,l
s 0 t 0 r 0
A.13
14
Abstract and Applied Analysis
From 2.5 and using the above inequality, we get
maxΔki,j,l,1 δk maxΔ0i,j,l,1.
i,j,l
i,j,l
A.14
Again using A.2–A.4 recursively and by utilizing 2.5 and 2.8, we have
maxΔki,j,l,2 δk maxΔ0i,j,l,2.
i,j,l
i,j,l
A.15
Further using A.5–A.8 recursively and by utilizing 2.5 and 2.8, we have
maxΔki,j,l,3 δk maxΔ0i,j,l,3.
i,j,l
i,j,l
A.16
Similarly, using A.9–A.12 recursively together with 2.5 and 2.8 separately for each
t 4, 5, 6, 7, respectively, we have
maxΔki,j,l,t δk maxΔ0i,j,l,t.
i,j,l
i,j,l
A.17
This completes the proof.
B. Proof of Lemma 3.2
Proof. From 2.2 and 2.4,
k1
k
pni,nj,nl
− pi,j,l
m
a0,r
r 0
m
a0,s
s 0
m
k
k
.
a0,t pir,js,lt
− pi,j,l
t 0
B.1
By expanding innermost summation, we get
m
k
k
a0,t pir,js,lt
− pi,j,l
t 0
k
k
k
k
− pi,j,l
− pi,j,l
a0,0 pir,js,l
a0,1 pir,js,l1
k
k
k
k
a0,2 pir,js,l2
···
− pir,js,l1
pir,js,l1
− pi,j,l
k
k
k
k
,
− pir,js,lm−1
· · · pir,js,l1
− pi,j,l
a0,m pir,js,lm
m
k
k
a0,t pir,js,lt
− pi,j,l
t 0
k
k
− pi,j,l
a0,0 pir,js,l
⎛
⎞
m
m−1
k
k
k
k
⎝ a0,p ⎠ pir,js,l1
− pi,j,l
a0,q pir,js,lq1
− pir,js,lq
,
p 1
q 1
B.2
Abstract and Applied Analysis
15
where a0,q is defined by 2.16. Now
m
m
k
k
a0,s
a0,t pir,js,lt − pi,j,l
s 0
t 0
a0,0
m
m m
k
k
k
k
a0,s pir,js,l
− pi,j,l
a0,p a0,s pir,js,l1
− pi,j,l
s 0
p 1 s 0
B.3
m−1
m
k
k
.
a0,s a0,q pir,js,lq1
− pir,js,lq
s 0
q 1
Since
m
k
k
a0,s pir,js,l
− pi,j,l
s 0
k
k
a0,0 pir,j,l
− pi,j,l
m
m−1
k
k
k
k
,
a0,p pir,j1,l
− pi,j,l
a0,q pir,jq1,l
− pir,jq,l
p 1
m
q 1
k
a0,s pir,js,l1
s 0
−
k
pi,j,l
B.4
k
k
a0,0 pir,j,l1
− pi,j,l
m
m−1
k
k
k
k
,
a0,p pir,j1,l1
− pi,j,l
a0,q pir,jq1,l1
− pir,jq,l1
p 1
q 1
then B.3 implies
m
m
k
k
a0,s
a0,t pir,js,lt − pi,j,l
s 0
t 0
k
k
− pi,j,l
a20,0 pir,j,l
a0,0
a0,0
m
m−1
k
k
k
k
a0,p pir,j1,l
− pi,j,l
− pir,jq,l
a0,0 a0,q pir,jq1,l
p 1
q 1
m
p 1
m m−1
m m
k
k
k
k
a0,p pir,j,l1
− pi,j,l
a0,p a0,q pir,j1,l1
− pi,j,l
p 1q 1
k
k
a0,p a0,q pir,jq1,l1
− pir,jq,l1
p 1q 1
m m−1
s 0q 1
k
k
.
a0,s a0,q pir,js,lq1
− pir,js,lq
B.5
16
Abstract and Applied Analysis
Substituting it into B.1, we get
k1
k
pni,nj,nl
− pi,j,l
a0,0 2
m
k
k
a0,r pir,j,l
− pi,j,l
r 0
a0,0
m m
k
k
a0,p a0,r pir,j1,l
− pi,j,l
p 1 r 0
m m m
k
k
a0,p a0,q a0,r pir,j1,l1
− pi,j,l
p 1q 1 r 0
a0,0
m
m k
k
a0,p a0,r pir,j,l1
− pi,j,l
p 1 r 0
a0,0
B.6
m m−1
k
k
a0,r a0,q pir,jq1,l
− pir,jq,l
r 0 q 1
m m m−1
k
k
a0,p a0,r a0,q pir,jq1,l1
− pir,jq,l1
p 1 r 0 q 1
m m m−1
k
k
.
a0,r a0,s a0,q pir,js,lq1
− pir,js,lq
r 0 s 0 q 1
Since
m
k
k
a0,r pir,j,l
− pi,j,l
r 0
m
k
k
a0,r pir,j1,l
− pi,j,l
m
m−1
k
k
k
k
a0,p pi1,j,l
− pi,j,l
a0,q piq1,j,l
− piq,j,l
,
p 1
q 1
k
k
a0,0 pi,j1,l
− pi,j,l
r 0
m
m−1
k
k
k
k
,
a0,p pi1,j1,l
− pi,j,l
a0,q piq1,j1,l
− piq,j1,l
p 1
m
k
k
a0,r pir,j,l1
− pi,j,l
q 1
k
k
− pi,j,l
a0,0 pi,j,l1
r 0
m
m−1
k
k
k
k
a0,p pi1,j,l1
− pi,j,l
a0,q piq1,j,l1
− piq,j,l1
,
p 1
m
k
k
a0,r pir,j1,l1
− pi,j,l
q 1
k
k
a0,0 pi,j1,l1
− pi,j,l
r 0
m
p 1
m−1
k
k
k
k
,
a0,p pi1,j1,l1
− pi,j,l
a0,q piq1,j1,l1
− piq,j1,l1
q 1
B.7
Abstract and Applied Analysis
17
then substituting these summations into B.6 and rearranging, we get
k1
k
pni,nj,nl
− pi,j,l
a20,0
m
m
k
k
k
k
a0,0 a0,p pi,j1,l
a0,p pi1,j,l
− pi,j,l
− pi,j,l
p 1
m
p 1
m
m k
k
k
k
a0,0
a0,p pi,j,l1
− pi,j,l
a0,p a0,q pi1,j1,l
− pi,j1,l
p 1
a0,0
p 1q 1
m
m m m
k
k
k
k
a0,p a0,q pi1,j,l1
− pi,j,l1
a0,p a0,q pi,j1,l1
− pi,j,l1
p 1q 1
m m m
p 1q 1
k
k
Nk2 ,
a0,p a0,q a0,r pi1,j1,l1
− pi,j1,l1
p 1q 1 r 1
B.8
where
Nk2
a20,0
k
k
a0,q piq1,j,l
− piq,j,l
m−1
q 1
a0,0
m m−1
k
k
a0,p a0,q piq1,j1,l
− piq,j1,l
p 1 q 1
a0,0
m m−1
k
k
a0,p a0,q piq1,j,l1
− piq,j,l1
p 1 q 1
m m m−1
k
k
a0,r a0,p a0,q piq1,j1,l1
− piq,j1,l1
r 1 p 1 q 1
a0,0
m m−1
k
k
a0,r a0,q pir,jq1,l
− pir,jq,l
r 0 q 1
m m m−1
k
k
a0,r a0,p a0,q pir,jq1,l1
− pir,jq,l1
r 0 p 1 q 1
m m m−1
k
k
.
a0,r a0,s a0,q pir,js,lq1
− pir,js,lq
r 0 s 0 q 1
B.9
18
Abstract and Applied Analysis
This implies
k
M0,0,0
m
m−1
k 2
2
a0,0 a0,t a0,0 a0,s max
Δi,j,l,1
i,j,l
t 1
s 1
m
m m−1
a0,0 a0,t a0,0
a0,r a0,s maxΔki,j,l,2
i,j,l
r 0 s 1
t 1
m
m m m−1
a0,r a0,t a0,s maxΔki,j,l,3
a0,t i,j,l
t 1 r 0 t 0 s 1
m m m−1
m
a0,0
a0,s a0,t a0,0
a0,t a0,s maxΔki,j,l,4
i,j,l
s 1 t 1
t 1 s 1
B.10
m m m−1
m
a0,0
a0,s a0,t a0,0
a0,t a0,s maxΔki,j,l,5
i,j,l
s 1 t 1
t 1 s 1
m m
m m m−1
a0,s a0,t a0,t a0,r a0,s maxΔki,j,l,6
t 1 r 0 s 1
i,j,l
s 1 t 1
m m m
m m m−1
a0,r a0,s a0,t a0,r a0,t a0,s maxΔki,j,l,7,
r 1 s 1 t 1
r 1 t 0 s 1
i,j,l
k
and Δki,j,l,t, t
where M0,0,0
and 2.9, we have
k
M0,0,0
0, 1, . . . , 7 are defined by 2.7 and 2.8. Now using notations 2.5
m
m−1
2
2
δ χ a0,0 a0,t a0,0 a0,s
t 1
s 1
k
m
m m−1
a0,0 a0,t a0,0
a0,r a0,s r 0 s 1
t 1
m
m m m−1
a0,t a0,r a0,t a0,s t 1 r 0 t 0 s 1
m
m m m−1
a0,s a0,t a0,0
a0,t a0,s a0,0
s 1 t 1
t 1 s 1
m m m−1
m
a0,0
a0,s a0,t a0,0
a0,t a0,s s 1 t 1
t 1 s 1
m m
m m m−1
a0,s a0,t a0,t a0,r a0,s s 1 t 1
t 1 r 0 s 1
m m m
m m m−1
a0,r a0,s a0,t a0,r a0,t a0,s .
r 1 t 0 s 1
r 1 s 1 t 1
B.11
Abstract and Applied Analysis
19
Using 2.10–2.16 for α, β, γ
k
M0,0,0
0, we have
δk χ
1
2
7
η0,0,0
η0,0,0
· · · η0,0,0
7
k
t
η0,0,0
.
χ δ
B.12
t 1
Similarly from 2.2 and 2.4 for α
k1
pni1,nj,nl
1, β
1
k
k
−
pi1,j,l
n − 1pi,j,l
n
γ
m
a1,r
0,
m
r 0
a0,s
s 0
m
k
a0,t pir,js,lt
t 0
−
k
pi,j,l
.
B.13
Now after expanding and rearranging the above summation, we have
1
k
k
pi1,j,l
n − 1pi,j,l
n
⎛
⎞
m
1
k
⎝a2
⎠ pk
a
−
−
p
1,p
0,0
i1,j,l
i,j,l
n
p 1
k1
−
pni1,nj,nl
a0,0
m
m m
k
k
k
k
a1,p pi,j1,l
− pi,j,l
a1,s a0,t pi1,j1,l
− pi,j1,l
a0,0
p 1
s 1 t 1
m
m m m
k
k
k
k
a0,p pi,j,l1
− pi,j,l
a1,r a0,s a0,t pi1,j1,l1
− pi,j1,l1
p 1
a0,0
r 1 s 1 t 1
m m m
m
k
k
k
k
Nk3 ,
a1,s a0,t pi1,j,l1
− pi,j,l1
a0,s a0,t pi,j1,l1
− pi,j,l1
s 1t 1
s 1 t 1
where
Nk3
a20,0
k
k
a1,q piq1,j,l
− piq,j,l
m−1
q 1
a0,0
m m−1
k
k
a0,p a1,q piq1,j1,l
− piq,j1,l
p 1 q 1
a0,0
m m−1
k
k
a0,p a1,q piq1,j,l1
− piq,j,l1
p 1 q 1
m m m−1
k
k
a0,r a0,p a1,q piq1,j1,l1
− piq,j1,l1
r 1 p 1 q 1
B.14
20
Abstract and Applied Analysis
a0,0
m m−1
k
k
a1,r a0,q pir,jq1,l
− pir,jq,l
r 0 q 1
m m m−1
k
k
a0,r a1,p a0,q pir,jq1,l1
− pir,jq,l1
r 0 p 1 q 1
m m m−1
k
k
a1,r a0,s a0,q pir,js,lq1
− pir,js,lq
.
r 0 s 0 q 1
B.15
Now using notations 2.5, 2.7–2.9 and using Lemma 3.1, we have
k
M1,0,0
m
1 2 m−1
2
δ χ a0,0 a1,t − n a0,0 a1,s t 1
s 1
k
m
m m−1
a0,0 a0,t a0,0
a1,r a0,s r 0 s 1
t 1
m
m m m−1
a0,t a1,r a0,t a0,s t 1 r 0 t 0 s 1
m
m m m−1
a0,0
a1,s a0,t a0,0
a0,t a1,s s 1 t 1
t 1 s 1
B.16
m
m m m−1
a0,0
a1,s a0,t a0,0
a0,t a1,s s 1 t 1
t 1 s 1
m m
m m m−1
a0,s a0,t a0,r a1,t a0,s t 1 r 0 s 1
s 1 t 1
m m m
m m m−1
a1,r a0,s a0,t a0,r a0,t a1,s .
r 1 t 0 s 1
r 1 s 1 t 1
Using 2.10–2.16 for α
k
M1,0,0
1, β
δk χ
γ
0, we have
1
2
7
η1,0,0
η1,0,0
· · · η1,0,0
7
k
t
χ δ
η1,0,0
.
t 1
B.17
Abstract and Applied Analysis
21
Hence in general after extensive calculation, and using notations 2.2, 2.4, 2.7, and 2.8
for α, β, γ 0, 1, . . . , n − 1, we obtain
k
Mα,β,γ
m
m−1
α n − β n − γ δ χ aβ,0 aγ,0 aα,t −
a
a
a
β,0
γ,0
α,s
3
n
t 1
s 1
k
m
m m−1
β n − γ a
a
aγ,0 aβ,t −
a
γ,0
α,r
β,s
2
n
r 0 s 1
t 1
m
m m m−1
γ aγ,t − aα,r aβ,t aγ,s t 1
n r 0 t 0 s 1
m
m m m−1
αβ n − γ a
aα,s aβ,t −
a
a
aγ,0
γ,0
β,t
α,s
3
n
s 1 t 1
t 1 s 1
m
m m m−1
αγ n − β aβ,0
aα,s aγ,t −
aγ,t aα,s aβ,0
3
n
s 1 t 1
t 1 s 1
B.18
m m
m m m−1
βγ aβ,s aγ,t − 2 aγ,r aα,t aβ,s s 1 t 1
n t 1 r 0 s 1
m m m
m m m−1
αβγ ,
aα,r aβ,s aγ,t − 3 aβ,r aγ,t aα,s r 1 s 1 t 1
n r 1 t 0 s 1
k
Mα,β,γ
δk χ
1
2
7
ηα,β,γ
ηα,β,γ
. . . ηα,β,γ
7 k
t
χ δ
ηα,β,γ
,
t 1
t
;t
where ηα,β,γ
1, 2, . . . , 7, is defined in 2.10–2.16. This completes the proof.
Acknowledgment
This work is supported by the Indigenous Ph.D. Scholarship Scheme of Higher Education
Commission HEC Pakistan.
References
1 J.-A. Lian, “On a-ary subdivision for curve design. I. 4-point and 6-point interpolatory schemes,”
Applications and Applied Mathematics, vol. 3, no. 1, pp. 18–29, 2008.
2 J.-a. Lian, “On a-ary subdivision for curve design. II. 3-point and 5-point interpolatory schemes,”
Applications and Applied Mathematics, vol. 3, no. 2, pp. 176–187, 2008.
3 G. Mustafa and F. Khan, “A new 4-point C3 quaternary approximating subdivision scheme,” Abstract
and Applied Analysis, Article ID 301967, 14 pages, 2009.
4 G. Mustafa and N. A. Rehman, “The mask of 2b 4-point n-ary subdivision scheme,” Computing,
vol. 90, no. 1-2, pp. 1–14, 2010.
5 N. Aspert, Non-linear subdivision of univariate signals and discrete surfaces, Ph.D. thesis, École
Polytechinique Fédérale de Lausanne, Lausanne, Switzerland, 2003.
22
Abstract and Applied Analysis
6 K. P. Ko, “A study on subdivision scheme-draft,” Dongseo University, Busan Republic of Korea, 2007,
http://kowon.dongseo.ac.kr/∼kpko/publication/2004book.pdf.
7 R. MacCracken and K. L. Joy, “Free form deformation with lattices of arbitrary topology,” in
Proceedings of the Computer Graphics, Annual Conference Series (SIGGRAPH ’96), pp. 181–188, 1996.
8 C. Bajaj, S. Schaefer, J. Warren, and G. Xu, “A subdivision scheme for hexahedral meshes,” Visual
Computer, vol. 18, no. 5-6, pp. 343–356, 2002.
9 K. T. McDonnell, Y. U. S. Chang, and H. Qin, “Interpolatory, solid subdivision of unstructured
hexahedral meshes,” Visual Computer, vol. 20, no. 6, pp. 418–436, 2004.
10 G. Mustafa and X. Liu, “A subdivision scheme for volumetric models,” Applied Mathematics. A Journal
of Chinese Universities Series B, vol. 20, no. 2, pp. 213–224, 2005.
11 F. Cheng and J. H. Yong, “Subdivision depth computation for Catmull-Clark subdivision surfaces,”
Computer-Aided Design and Applications, vol. 3, no. 1–4, pp. 485–494, 2006.
12 J. M. Wang, X. N. Luo, YI. Li, X. Q. Dai, and F. You, “The application of the volumetric subdivision
scheme in the simulation of elastic human body deformation and garment pressure,” Textile Research
Journal, vol. 75, no. 8, pp. 591–597, 2005.
13 S. Hashmi and G. Mustafa, “Estimating error bounds for quaternary subdivision schemes,” Journal of
Mathematical Analysis and Applications, vol. 358, no. 1, pp. 159–167, 2009.
14 Z. Huang, J. Deng, and G. Wang, “A bound on the approximation of a Catmull-Clark subdivision
surface by its limit mesh,” Computer Aided Geometric Design, vol. 25, no. 7, pp. 457–469, 2008.
15 G. Mustafa, F. Chen, and J. Deng, “Estimating error bounds for binary subdivision curves/surfaces,”
Journal of Computational and Applied Mathematics, vol. 193, no. 2, pp. 596–613, 2006.
16 G. Mustafa and J. Deng, “Estimating error bounds for ternary subdivision curves/surfaces,” Journal
of Computational Mathematics, vol. 25, no. 4, pp. 473–484, 2007.
17 G. Mustafa, S. Hashmi, and N. A. Noshi, “Estimating error bounds for tensor product binary
subdivision volumetric model,” International Journal of Computer Mathematics, vol. 83, no. 12, pp. 879–
903, 2006.
18 X.-M. Zeng and X. J. Chen, “Computational formula of depth for Catmull-Clark subdivision
surfaces,” Journal of Computational and Applied Mathematics, vol. 195, no. 1-2, pp. 252–262, 2006.
19 J. Peters and X. Wu, “The distance of a subdivision surface to its control polyhedron,” Journal of
Approximation Theory, vol. 161, no. 2, pp. 491–507, 2009.
20 H.-W. Wang and K.-H. Qin, “Estimating subdivision depth of Catmull-Clark surfaces,” Journal of
Computer Science and Technology, vol. 19, no. 5, pp. 657–664, 2004.
21 H. Wang, Y. Guan, and K. Qin, “Error estimate for Doo-Sabin surfaces,” Progress in Natural Science,
vol. 12, no. 9, pp. 697–700, 2002.
22 H. Wang, H. Sun, and K. Qin, “Estimating recursion depth for Loop subdivision,” International Journal
of CAD/CAM, vol. 4, no. 1, pp. 11–18, 2004.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014