Disruptive Innovation and Naval Power: Strategic
and Financial Implications of Unmanned
Underwater Vehicles (UUVs) and Long-term
Underwater Power Sources
MASSACHUsf TTT IMef0hrE
OF TECHNOLOGY
by
MAY 0 8 201
Richard Winston Larson
LIBRARIES
S.B. Engineering
Massachusetts Institute of Technology, 2012
Submitted to the Department of Mechanical Engineering
in partial fulfillment of the requirements for the degree of
Master of Science in Mechanical Engineering
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
February 2014
© Massachusetts Institute of Technology 2014. All rights reserved.
2)
Author
Dep.atment of Mechanical Engineering
nuaryL5.,3014
Certified by....
Y
Douglas P. Hart
Professor of Mechanical Engineering
Tbesis Supervisor
A ccepted by .......................
........
David E. Hardt
Ralph E. and Eloise F. Cross Professor of Mechanical Engineering
2
Disruptive Innovation and Naval Power: Strategic and
Financial Implications of Unmanned Underwater Vehicles
(UUVs) and Long-term Underwater Power Sources
by
Richard Winston Larson
Submitted to the Department of Mechanical Engineering
on January 15, 2014, in partial fulfillment of the
requirements for the degree of
Master of Science in Mechanical Engineering
Abstract
The naval warfare environment is rapidly changing. The U.S. Navy is adapting by
continuing its blue-water dominance while simultaneously building brown-water capabilities. Unmanned systems, such as unmanned airborne drones, are proving pivotal in facing new battlefield challenges. Unmanned underwater vehicles (UUVs) are
emerging as the Navy's seaborne equivalent of the Air Force's drones. Representing
a low-end disruptive technology relative to traditional shipborne operations, UUVs
are becoming capable of taking on increasingly complex roles, tipping the scales of
battlefield entropy. They improve mission outcomes and operate for a fraction of
the cost of traditional operations. Furthermore, long-term underwater power sources
at currently under development at MIT will extend UUV range and operational endurance by an order of magnitude. Installing these systems will not only allow UUVs
to complete new, previously impossible missions, but will also radically decrease costs.
I explore the financial and strategic implications of UUVs and long-term underwater
power sources to the Navy and its future operations. By examining current naval operations and the ways in which UUVs could complement or replace divers and ships,
I identify ways to use UUV technology to reduce risk to human life, decrease costs,
and leverage the technology learning curve. I conclude that significant cost savings
are immediately available with the widespread use of UUVs, and current research
investment levels are inadequate in comparison with the risks and rewards of UUV
programs.
Thesis Supervisor: Douglas P. Hart
Title: Professor of Mechanical Engineering
3
4
Acknowledgments
I am deeply indebted to the Massachusetts Institute of Technology and the profound
impact it has had on my life. My more than five years at the Institute have been a formative and defining time. I thank those in the Department of Mechanical Engineering
who taught and inspired me on my journey at MIT.
Professor Douglas Hart has been the perfect mentor. He has pushed me to employ
my strengths, improve my weaknesses, and pursue my academic interests. My thesis
is a reflection of his academic leadership ability. Without his insight, hard work, and
friendship, I would not have had the opportunity to chase my dreams.
My friends and family made my work possible. I thank Professor Roger Porter,
Brandon Hopkins, Nathaniel Coughran, Jonathan Sue Ho, and Tom Milnes for their
friendship and wisdom. I thank my parents, Gordon and Allison Larson, for their
generosity and love. Finally, I thank my wife, Sarah, for being the best thing that
ever happened to me.
5
6
Executive Summary
As the U.S. Military maintains readiness to wage war with traditional nation-states
as well as with terrorist groups, unmanned and autonomous systems are revolutionizing warfare. Aerial drones have been wildly successful, and unmanned underwater
vehicles (UUVs) are an opportunity for the U.S. Navy to increase its capability and
effectiveness in a similar way under the sea. For more information, see Section 1.1.
Unmanned Underwater Vehicles
Unmanned underwater vehicles are used in a variety of military, scientific, and industrial settings. There are three classes of UUVs: autonomous underwater vehicles
(AUVs), remotely operated vehicles (ROVs), and underwater gliders. The diversity
of vehicle types and sizes offers flexibility in application and deployment, a key benefit
to using UUVs. For more information, see Section 1.2.1.
Long-term power sources will drastically improve the usefulness of the UUV technologies. An aluminum-based power source being developed at MIT under the direction of Professor Doug Hart is projected to offer an energy density of 8000 MJ/L, a
1000% improvement over current energy storage technologies. The improved range
and power capabilities of UUVs equipped with such a power source will be a strategic
advantage. For more information, see Section 1.2.2.
7
Disruptive Innovation and Battlefield Entropy
Disruptive innovations are those which improve a product along new performance
metrics. Disruptive technologies improve through sustaining innovation (improvement along existing performance metrics) to displace existing technologies. Disruptive
innovation plays an important role in maintaining combat superiority. Submarines,
aerial drones, and cruise missiles are all examples of disruptive military innovations.
There is significant first-mover advantage in adopting and skillfully managing disruptive innovation. For more information, see Section 2.1.
Unmanned underwater vehicles are disrupting manned sea platforms.
Though
they are in many ways not as capable as ships or divers, they offer improved performance in cost, difficulty of detection, and flexibility. Not only are UUVs an opportunity, but they are also a threat. Other navies are also investing in UUVs, including
Russia, China, and Thailand, as well as drug cartels and terrorist groups. For more
information, see Section 2.2.
Battlefield entropy measures the difference between an entity's ideal fighting force
and its actual combat effectiveness. Even if a combat entity possesses superior force,
or is not experiencing attrition, its combat effectiveness will decrease as the entropy
it experiences increases. Weapon systems (broadly defined as any element providing
force) decrease battlefield entropy for the user and increase entropy for the opponent.
Given a more effective weapon, a greater change in entropy will be experienced.
Disruptive military innovations represent characteristic improvements in battlefield
entropy, and UUVs offer a unique opportunity for the Navy to change battlefield
entropy in its favor. For more information, see Section 2.3.
Disruptive innovation must be skillfully managed to realize its full potential. Four
theories (jobs-to-be-done theory, market/application identification, discovery-driven
planning, and resource-process-value theory) provide best practices for identifying,
adopting, and applying disruptive innovations well. For more information, see Section
2.4.
8
UUV Mission Cost Analysis and Comparison
To demonstrate the disruptive power of UUVs, I analyzed the costs of missions that
can be completed using current UUV technology. I examined the mission scenarios,
the cost of completing the mission using manned systems, and the cost of completing
the mission using UUVs. I compared the costs and analyzed the advantages of using
UUV technologies. In the table below, I present the percent cost savings experienced
by using UUV technologies rather than manned systems. In general, UUV systems
are roughly an order of magnitude (90% cost savings) less expensive than manned
systems. For more information, see Chapter 3.
Percent Savings
Mission
CBNRE
Water Column Profiling
Mapping (High Definition)
High Definition
Medium Definition
Low Definition
Harbor Monitoring
Array Deployment
Mine-hunting
Hold-at-risk
ASW Training
Hull Inspection (Panamax)
Attached Materials
In-ater
In-water Sury
Survey
Undersea Infrastructure
93%
99%
76%
93%
93%
98%
88%
92%
96%
81%
54%
67%
86%
Implications of UUV Adoption
In conclusion, I offer several observations on UUVs and their disruptive potential to
naval operations:
" UUVs offer significant cost savings
" Manned platforms are expensive
" Aluminum power sources are an important step forward
9
"
UUVs are not one-size-fits-all
" UUVs represent a significant change in battlefield entropy
" Nonconsumption and overshooting offer many immediate UUV applications
" The low costs and disruptive nature of UUVs will make them attractive to other
navies and entities
For more information, see Chapter 4.
Unmanned underwater vehicles will revolutionize naval warfare. Proper innovation management and early, enthusiastic adoption is required to seize their strategic
potential and maintain maritime superiority.
10
Contents
1
2
1.1
Technology and the Changing Face of Naval Warfare
. . . . . . . . .
19
1.2
Technological Advances in Naval Warfare . . . . . . . . . . . . . . . .
20
1.2.1
Unmanned Underwater Vehicles . . . . . . . . . . . . . . . . .
20
1.2.2
Long-term Underwater Aluminum Power Source . . . . . . . .
24
27
Disruptive Innovation in Naval Technology
2.1
A Brief Introduction to Disruptive Innovation
2.1.1
2.2
2.3
2.4
2.5
3
19
Introduction
. . . . . . . . . . . . .
Disruptive Innovation Example: RCA, Sony, and the Transistor
. . . . . . . . .
Disruptive Innovation in Warfare
2.2.1
Disruptive Innovation in the U.S. Military
2.2.2
Disruption of Naval Warfare by UUVs
29
30
31
. .
32
Battlefield Entropy . . . . . . . . . . . . . . . . .
34
2.3.1
Measuring Battlefield Entropy . . . . . . .
36
2.3.2
Evaluating Military Innovation in Terms of Battlefield Entropy
39
2.3.3
Battlefield Entropy and UUVs . . . . . . .
42
Managing Disruptive Innovation . . . . . . . . . .
44
2.4.1
Military Disruption Case Study: UAVs . .
46
2.4.2
Disruption Lessons Learned
. . . . . . . .
47
. . . . . . . . . . . . . .
49
Potential UUV Missions
51
Mission Cost Analyses
3.1
27
CBNRE Detection and Localization . . . . . . . . . . . . . . . . . . .
11
51
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.1.1
Mission Description . . . . . .
51
3.1.2
Manned System CONOPs and Costs
52
3.1.3
UUV CONOPs and Costs
52
Near-land and Harbor Monitoring
53
3.2.1
Mission Description . . . . . .
53
3.2.2
Manned System CONOPs and Costs
53
3.2.3
UUV CONOPs and Costs . .
54
Array Deployment
. . . . . . . . . .
54
3.3.1
Mission Description . . . . . .
54
3.3.2
Manned System CONOPs and Costs
55
3.3.3
UUV CONOPs and Costs . .
55
Oceanography and Bathymetry . . .
55
3.4.1
Mission Description . . . . . .
55
3.4.2
Manned System CONOPs and Costs
56
3.4.3
UUV CONOPs and Costs . . . . .
56
Mine detection, classification, identification, and neutralization
57
3.5.1
Mission Description . . . . . . . . .
57
3.5.2
Manned System CONOPs and Costs
57
3.5.3
UUV CONOPs and Costs . . . . .
58
Hold-at-risk . . . . . . . . . . . . . . . . .
58
3.6.1
Mission Description . . . . . . . . .
58
3.6.2
Manned System CONOPs and Costs
58
3.6.3
UUV CONOPs and Costs . . . . .
59
ASW Training . . . . . . . . . . . . . . . .
59
3.7.1
Mission Description . . . . . . . . .
59
3.7.2
Manned System CONOPs and Costs
60
3.7.3
UUV CONOPs and Costs . . . . .
60
In-water Survey and Hull Inspection
. . .
60
3.8.1
Mission Description . . . . . . . . .
60
3.8.2
Manned System CONOPs and Costs . . . . . . . . . . . . . .
61
12
3.8.3
3.9
4
UUV CONOPs and Costs ....................
61
Monitoring Undersea Infrastructure . . . . . . . . . . . . . . . . . . .
62
3.9.1
M ission Description . . . . . . . . . . . . . . . . . . . . . . . .
62
3.9.2
Manned System CONOPs and Costs . . . . . . . . . . . . . .
62
3.9.3
UUV CONOPs and Costs . . . . . . . . . . . . . . . . . . . .
63
67
Implications of UUV Adoption
4.1
UUVs offer significant cost savings
. . . . . . . . . . . . . . . . . . .
67
4.2
Ships are expensive . . . . . . . . . . . . . . . . . . . . . . . . . . . .
68
4.3
Aluminum power sources are an important step forward . . . . . . . .
68
4.4
UUVs are not one-size-fits-all
. . . . . . . . . . . . . . . . . . . . . .
69
4.5
Nonconsumption and overshooting offer many immediate UUV applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6
4.7
70
Low costs and disruptive nature of UUVs will make them attractive to
other navies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
73
A Technology
Unmanned Underwater Vehicle Technology . . . . . . . . . . . . . . .
73
Technology State-of-the-Art and Research Focus . . . . . . . .
73
Strategic Use of UUVs . . . . . . . . . . . . . . . . . . . . . . . . . .
74
US Navy 2004 UUV Master Plan . . . . . . . . . . . . . . . .
75
A.3 Evaluated Mission Selection . . . . . . . . . . . . . . . . . . . . . . .
77
A.1
A.1.1
A.2
A.2.1
79
B Naval System Cost Calculations
B .1
Ships . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.1
Ship Life-cycle Costs as Calculated by the Congressional Bud. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
79
. . . . . . . . . . . . . . . . . . .
80
. . . . . . . . . . . . . . . . . . . . . . . .
85
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
85
get O ffice
B .2
B.1.2
Other Ship Life-cycle Costs
B.1.3
Hourly Ship Costs
U U Vs
79
13
B.2.1
Energy Costs
. . . . . . . . . .
86
B.2.2
Ship Utilization Rate . . . . . .
88
B.2.3
Man-portable Class . . . . . . .
89
B.2.4
Light-weight Class
. . . . . . .
89
B.2.5
Heavy-weight Class . . . . . . .
89
B.2.6
Large Class
. . . . . . . . . . .
90
B.2.7
Z-Ray Glider
. . . . . . . . . .
90
B.2.8
Spray Glider . . . . . . . . . . .
91
B.3 Other Mission Resource Costs . . . . .
91
B.3.1 Diving Teams . . . . . . . . . .
91
B.3.2
AUV and ROV Operators
. . .
92
B.3.3
Navy SEAL Operators
. . . . .
92
B.3.4
Navy Marine Mammal Program
93
C Mission Cost Calculations
C.1
C.2
C.3
95
Intelligence, Surveillance, and Reconnaissance (ISR)
. . . . . . .
95
C.1.1
CBNRE Detection and Localization . . . . .
. . . . . . .
95
C.1.2
Water Column Profiling
. . . . . . . . . . .
. . . . . . .
96
C.1.3
Near-land and Harbor Monitoring . . . . . .
. . . . . . .
97
C.1.4
Array Deployment
. . . . . . . . . . . . . .
. . . . . . .
99
C.1.5
Bathymetry . . . . . . . . . . . . . . . . . .
. . . . . . .
100
C.1.6
Mine Detection, Classification, Identification, and Neutralization 102
Anti-submarine Warfare (ASW) . . . . . . . . . . .
. . . . . . .
103
C.2.1
Hold-at-risk . . . . . . . . . . . . . . . . . .
. . . . . . .
103
C.2.2
ASW Training . . . . . . . . . . . . . . . . .
. . . . . . .
105
. . . . . . . . .
. . . . . . .
106
. . . .
. . . . . . .
106
. . . . .
. . . . . . .
109
Inspection and Identification (I&I)
C.3.1
In-water Survey and Hull Inspection
C.3.2
Monitoring undersea infrastructure
14
List of Figures
1-1
Hydroid REMUS 100 AUV [1]
21
1-2
Hydroid REMUS 600-S AUV [2]
21
1-3
Bluefin 21 AUV [3] .......
22
1-4
Boeing Echo Ranger AUV [4]
1-5
Oceaneering Magnum Plus ROV [5]
23
1-6
Spray Glider [6] .........
24
1-7
Z-Ray Glider [7] ..........
24
2-1
Technology improvement and disruption [8] . . . . . . . .
27
2-2
Battlefield entropy as a measure of weapon effectiveness .
36
22
.
15
16
List of Tables
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1
Analyzed M issions
3.1
Mission costs comparison between manned systems and UUVs
3.2
Mission costs comparison between aluminum and non-aluminum power
.
.
49
64
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
CBO-calculated Life-cycle Ship Costs . . . . . . . . . . . . . . . . . .
81
B.2 CBO-calculated Life-cycle Ship Costs . . . . . . . . . . . . . . . . . .
82
. . . . . . . . . . . . . . . . . . . . . . . . . . .
86
B.4 Unmanned Underwater Vehicle Characteristics and Costs . . . . . . .
87
UUV Hourly Costs and Ship Utilization Rates . . . . . . . . . . . . .
88
B.6 Other Mission Resource Costs per Hour . . . . . . . . . . . . . . . . .
91
system s
B.1
B.3 Ship Costs per Hour
B.5
17
18
Chapter 1
Introduction
1.1
Technology and the Changing Face of Naval
Warfare
As the only global superpower, the United States of America faces unique challenges
in preparing for and waging war. While it must be prepared to fight nation-states with
well-developed military and industrial strength, the U.S. military must also confront
threats from terrorists and guerrillas using unconventional tactics. Maintaining broad
readiness is undeniably difficult.
Technology has always been a key to superior war fighting ability. Technology
not only improves current weaponry (faster aircraft, more powerful explosives, and
improved survivability). It also revolutionizes the way war is fought (RADAR, aircraft
carriers, cruise missiles). While technology has enabled U.S. Armed Forces to save
lives, protect the homeland, and extend military reach, it has also presented soldiers
with new threats, such as improvised explosive devices (IEDs) and cyber warfare,
that allow small numbers of operatives to inflict widespread damage. As the enemy
becomes more dangerous, the U.S. Military must adapt, finding and effectively using
new technologies to wage war.
The U.S. Navy enables the United States to project military influence around the
world. Aircraft carriers, submarines, destroyers, and other vessels allow for immediate
19
strikes against targets globally. The Navy's capabilities also provide humanitarian
relief, scientific data, and the protection of U.S. maritime and trade interests. During
the Cold War, the Navy built a blue-water fleet intended to combat the capabilities
of the Soviet Union. Since the fall of the Berlin Wall, the Navy has continued its
blue-water dominance in response to ascendant threats from other nations desiring
maritime superiority. Simultaneously, the Navy has had to adapt to brown-water
operations in the shallow coastal areas and riverine environments of the Middle East
and the Horn of Africa to combat terrorism.
1.2
Technological Advances in Naval Warfare
Even as budgets are cut, the types of missions the Navy has needed to fulfill have
multiplied as threats have increased. As in the past, technology again presents the
solution. The advent of unmanned underwater vehicles (UUVs) has accompanied
advances in autonomy, energy storage, and surface vehicle technology. Robotics is
revolutionizing the ways by which war is pursued.
1.2.1
Unmanned Underwater Vehicles
Unmanned underwater vehicles (UUVs) are the drones of the sea: remotely operated
or autonomous underwater vessels capable of completing missions in place of humans,
as well as missions impossible with manned platforms. They are in use by the Navy
in oceanography, surveillance, and mine hunting roles [9]. Commercial applications
include a variety of oil installation tasks, pipeline inspection, and survey, salvage,
and recovery operations [10].
Scientists use AUVs for bathymetry, to explore deep
sea geologic formations, and to interact with wildlife [11]. There are three types of
UUVs: remotely operated vehicles (ROVs), autonomous underwater vehicles (AUVs),
and underwater gliders.
20
Autonomous Underwater Vehicles
Autonomous underwater vehicles require minimal human intervention, possessing differing levels of autonomy dependent upon mission use. AUV's are generally deployed
from surface ships and then complete missions lasting from eight to 72 hours. Typical
sensor packages include side scan and synthetic aperture sonar, still and video cameras, and environmental monitoring packages [11]. AUV's are employed in entering
denied areas due to their low risk of detection, low cost in comparison to manned
systems, and ability to collect high-quality information [9]. There are four classes of
AUVs:
1. Man-portable class (REMUS 100 [12], Fig. 1-1)
Diameter: 0.19 m
Average speed: 3 kts
Figure 1-1: Hydroid REMUS 100 AUV [1]
2. Light-weight class (REMUS 600 [13], Fig. 1-2)
Diameter: 0.32 m
Average speed: 3 kts
Figure 1-2: Hydroid REMUS 600-S AUV [2]
21
3. Heavy-weight class (Bluefin 21 [3], Fig. 1-3)
Diameter: 0.53 m
Average speed: 3 kts
L0I
A
Figure 1-3: Bluefin 21 AUV [3]
4. Large class (LDUUV [4], Fig. 1-4)
Diameter: 1.27 m
Average speed: 3 kts
Figure 1-4: Boeing Echo Ranger AUV [4]
Remotely Operated Vehicles
Remotely operated vehicles are human controlled and connected to the surface by
tether. The tether provides communications (generally by a fiber optic connection)
and, in most cases, power to the ROV. They are able to remain at depth and on
task for extended periods of time. Used extensively in the oil industry, salvage, and
scientific operations to work at extreme depths, ROVs come in all shapes, sizes, and
deployment platforms, including on-shore, oil-rigs, and ships [10]. Remotely operated
22
vehicles are used in situations where constant human supervision is convenient (such
as on an oil rig) or necessary (such as for retrieval missions, where current autononly abilities are not sufficient). Vehicles are typically equipped with still and video
cameras and robotic manipulators. An inspection ROV is pictured in Fig. 1-5.
Figure 1-5: Oceaneering Magnum Plus ROV [5]
Gliders
Whereas AUVs and ROVs move via powered propulsion systems, gliders depend on
underwater wings and changes in buoyancy to propel themselves through the water.
They move in a telltale sawtooth pattern through the water, going up and down as
they move forward [14]. Since they do not have powered propulsion, gliders are slower
and more difficult to control than other UUV types. While slow (approximately 0.5
kt [6]), gliders consume little energy and are capable of staying at sea for extended
periods of time. A series of glider experiments have lasted six months and even in
excess of a year, with one glider successfully crossing the Atlantic over the course of
221 days [15].
9 Glider (Spray [6], Fig. 1-6)
Length: 2.1 m
Average speed: 0.5 kts
23
Figure 1-6: Spray Glider [6]
* Liberdade Glider (Z-Ray [16], Fig. 1-7)
Wingspan: 6.1 m
Average speed: 2 kts
Figure 1-7: Z-Ray Glider [7]
1.2.2
Long-term Underwater Aluminum Power Source
Professor Doug Hart at MIT is leading a research group developing aluminum-based
underwater power sources for long-term UUV deployment. Aluminum is an ideal
power source due to its high energy density. Aluminum is highly reactive with water,
releasing heat and hydrogen in a vigorous reaction:
2A + 6H 20
-
3H 2 + 2A (OH) 3 +
24
Q.
(1.1)
Unfortunately, that energy is difficult to access due to the passivation layer that forms
in nanoseconds and coats all aluminum exposed to oxygen. Other aluminum power
sources developed in the past have met limited success, such as one attempting to
burn aluminum [17].
The MIT team is taking a new approach, mixing aluminum with gallium to strip
off the passivation layer and prevent its formation. Using this phenomenon as the
basis to produce fuel for a hydrogen-based fuel cell, MIT has achieved promising
success and has developed a successful prototype system.
In another exciting development, the MIT team is developing an electrochemical
solution based on an oxidation reaction of aluminum, permanganate, and water:
Al + 40H-
-
Al (OH)4 + 3e-(-2.3 vs. SHE)
MnO- + 2H 20 + 3e- -+ 40H- + MnO 2 (0.6 vs. SHE)
Al + MnO- + 2H 2 0
-a
Al (OH) 4 + MnO 2
(Anode)
(1.2a)
(Cathode)
(1.2b)
(Overall)
(1.2c)
Currently, the team (MIT researchers working with spin-off company Open Water
Power) has developed a water-based cell and has designed an encapsulation and containment system for the REMUS 600. An aluminum-permanganate cell will have an
energy density of 2.3 MJ/L and power density of 5.3 W/L, comparing favorably with
current Li-ion technologies (0.6 MJ/L and 1.4 W/L). Current development concepts
are designed to provide 75 W over five days at a depth of 100 ft [18].
25
26
Chapter 2
Disruptive Innovation in Naval
Technology
2.1
A Brief Introduction to Disruptive Innovation
The material in this brief overview draws heavily from the works of Professor Clayton
M. Christensen at Harvard Business School, particularly The Innovator's Dilemma
[8] and The Innovator's Solution [19].
Please see these and other publications by
Christensen and his colleagues (such as Seeing What's Next [20]) for more information
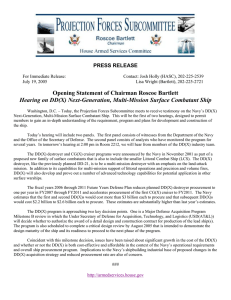
about disruptive innovation and the role it plays in business and government.
- Convenience
\g\O
*Price
Cu, oer tqeeds
o\O~
*Reliability
Time
Figure 2-1: Technology improvement and disruption [8]
27
Disruptive innovation is the process by which technologies dominating a market
are displaced by emerging technologies that are initially low-end or enter from adjacent markets. The basics of the theory of disruptive innovation are summarized in
Fig. 2-1. The red line represents the needs of customers in a given market (though
represented as a single line, customers demand a distribution of technology needs
from low to high), which increase over time. When first introduced, technologies are
not advanced enough to meet the needs of customers. In this situation, products
compete based on their features and reliability, and customers will pay a premium
for improved performance or increased reliability. Integrated product architectures
are best suited to providing the required performance (due to the complexity of component interdependencies). Technologies improve through sustaining innovation, or
innovations which enhance a product in its existing market and value network. A
value network (sometimes called a value chain) is the web of value-adding steps that
produce and market a product, ending with the user (for example: steel producer,
engine manufacturer, auto maker, and dealer are all parts of the car value network).
Once the technology is advanced enough that it exceeds the customers' requirements, the customers are overshot and will choose products based on convenience and
price. Modular product architectures become dominant because component interdependencies are well defined. Because the marginal utility derived from an incremental
improvement in technology performance has vanished, the marginal price increase for
technological improvement falls to zero, and products become commoditized. The
performance shortfall (and the value focus) moves to an adjacent position in the
value network.
When customers in a given market are overshot, or the products available have
features that are more advanced than the customers need, that market is ripe for
disruption. A product that is technologically inferior, but cheaper and good enough
to accomplish the required task, will be attractive to those customers at the low end
of the market. Alternatively, a technology that is used to complete a task that is not
being completed currently (in other words, it competes against nonconsumption) can
move into an adjacent market and displace the dominant technology as it improves
28
(through sustaining innovation) and is creatively used and applied. In both cases,
customers evaluate and value the new product using performance metrics different
from those used in evaluating the dominant products.
Whereas sustaining innovations improve existing technologies and products inside
an existing value network and product architecture for a given market, disruptive
innovations create new value networks and markets, and use distinct product architectures to satisfy new, distinct performance metrics. Sustaining innovations are
generally technology-based to satisfy market needs, and disruptive innovations tend
to be new market applications of existing technologies that do not fit the market in a
traditional way. High-end suppliers and customers will ignore disruptive innovations
because those products do not have the more advanced features that they require,
and pursuing the high-end of the market is best practice. Ignorance continues until
the disrupting technology has become advanced enough to replace the once-dominant
product, and the market has changed completely.
There is significant first-mover advantage in fielding disruptive innovations due
to experience and learning curves with the innovation.
However, disruptive inno-
vations cannot be "stuffed" into existing markets. Because they demand new value
networks and compete based on different features, disruptive innovations cannot compete head-to-head with established products in established markets with established
value networks.
2.1.1
Disruptive Innovation Example: RCA, Sony, and the
Transistor
Disruption is best understood through examples. A classic example of a disruptive
innovation in business related by Christensen is the development and market application of the transistor in the 1960s [19]. RCA dominated the home electronics market,
selling TVs and radios equipped with vacuum tubes. Appliance stores sold these
products, making money off of vacuum tube repairs. The transistor was invented by
Bell Labs in 1947, but it was not powerful enough to replace vacuum tubes. Nonethe-
29
less, seeing its revolutionary potential, RCA invested heavily in transistor research
to boost power and use it in their TVs and radios. Sony took a different approach,
introducing the first portable transistor radio in 1955. Sony used the same attributes
that RCA saw as weaknesses (small size, low power) as strengths in their product.
Sound quality on transistor radios was inferior to vacuum tube radios, but they were
portable and cheap, allowing people to listen to music in places they could not take a
table-top radio and were not able have music before. The customers buying transistor
radios were not those who bought the larger, "better" vacuum tube radios. The new
radios could not be sold in appliance stores, as there were no vacuum tubes to repair,
but were instead sold in discount stores, thereby establishing a new value network.
Initially, RCA ignored Sony's radio, as it did not compete directly with their
product and functioned in a different value network. Sony was essentially building its
own new market. And RCA wasn't ignoring the technology: they were working on
transistor technologies. Sony continued to improve its transistor-based products and
gain experience in its new market and value network, introducing better radios and
portable TVs, selling them to people who could not afford the higher quality products
or had unique use cases. Eventually Sony began producing large appliances using
transistors that could compete directly with RCA's vacuum tube products, but at a
much lower price and more conveniently. RCA, despite its investment in transistor
technology, lost its market by failing to use the new technology disruptively by using
its attributes as strengths. Instead, they attempted to improve the technology and
use it in the existing appliance market, where distributors and customers did not
want it anyway.
2.2
Disruptive Innovation in Warfare
The way war is waged has been revolutionized many times by the introduction of new
weapons and new defense systems. Artillery, tanks, aircraft, radar, electronic warfare,
atomic weaponry, and submarines are only a small handful of examples of the effects
of technology on warfare. Understanding how to maximize innovation application is
30
an important strategic ability in pursuing victory.
2.2.1
Disruptive Innovation in the U.S. Military
The United States Armed Forces has a first-rate track record in pursuing innovation.
Aircraft carriers, radar, nuclear warships, electronic warfare, and unmanned aerial
vehicles (UAVs) are examples of how the U.S. has relentlessly pursued new technology
as a means to protect America.
The term "disruptive innovation" has taken on a slightly different meaning in the
military, where is denotes a new technology that makes an old capability obsolete
[21]. For example, electromagnetic rail guns promise to make existing cruise missiles
obsolete [22]. The military's definition differs from the academic definition of a disruptive innovation [21], which is a product that is evaluated using new performance
metrics and eventually displaces previously dominant technologies that overshot customer needs [23] (the definition I will continue to use). To denote that which the
military traditionally terms as disruptive, I will use "revolutionary". According to
this definition, a rail gun, though undoubtedly revolutionary, is a sustaining innovation. It provides greater capability based on traditional performance metrics (i.e.
more firepower, at a higher rate, with improved range and accuracy). An example of
a disruptive innovation in the military is UAVs. While they are slower, less maneuverable, and carry less than manned aircraft, UAVs are cheaper, broadly available,
and keep pilots out of harm's way. The military values these new capabilities, and
since their introduction, UAVs have become more capable, replacing manned aircraft
in a variety of important missions [24]. I will cover unmanned aircraft in more detail
in Section 2.4.1.
The U.S. Armed Forces must pursue both types of innovation to maintain its dominance [23]. It must maintain its conventional war fighting ability by building better
and faster weapons and improving soldier lethality in order to fight conventional wars.
The military must also pursue disruptive innovations for a variety of reasons, keeping
in mind that first-mover advantage is significant in deploying disruptive innovation.
First, disruptive innovations are useful in fighting both traditional and nontradi31
tional enemies. Unmanned aircraft, for example, are useful in fighting terrorists, and
would also be useful in fighting a nation-state. Although disruptive innovations may
not be absolutely necessary to win battles, they decrease casualties and speed victory.
Radar solved the nonconsumption of battlefield awareness during World War II. The
Allies would have likely won without radar, it was an important invention that saved
lives and accelerated victory.
Second, by gaining experience with disruptive innovation, the military will be
able to successfully counter similar technologies used by the enemy. Continuing with
UAVs, the experience the U.S. military is gaining with these aircraft will enable it
to better fight against UAVs deployed by other parties in future conflicts. In World
War I, Britain was challenged by U-boats because of their lack of experience with
that type of disruptive innovation [24].
Third, the advantages gained by deploying disruptive innovations almost always
shorten conflict and ultimately save both civilian and military lives. Disruptive innovations are also useful for peaceful purposes. Radar, developed for the military, is
now used in many ways, including weather forecasting and civilian aviation.
2.2.2
Disruption of Naval Warfare by UUVs
Naval warfare is currently undergoing disruption by way of UUVs. These unmanned
vehicles promise to be highly effective force multipliers. They are disruptive because
they do not perform well along traditional metrics of maritime warfare (multi-mission
capabilities, time-critical strike weaponry, long deployments, and speed). They are,
however, highly desirable and advanced along metrics that are becoming important
to the Navy, including limited human interaction and risk, decreased cost, and clandestine operation.
In many instances, manned vessels overshoot mission requirements, attempting
to be all-purpose ships. They are large, integrated systems that must be carefully
planned and built. Ships are expensive, requiring massive manufacturing facilities as
well as extensive shipbuilding, construction, and weaponry ability. Entities desiring to
build naval vessels, even of moderate complexity, face steep barriers to entry and high
32
fixed costs. Unmanned underwater vehicles, on the other hand, can be constructed
from off-the-shelf parts. While more advanced UUVs capable of great depths are
more difficult to design and construct, simple UUVs designed for depths of less than
100 m and simple missions are inexpensive and require minimal engineering ability.
Thailand, for example, has a successful UUV program, producing vehicles for antisubmarine warfare training [25]. Costing less than $50,000, these vehicles, while of
simple construction and capable of depths of only 30 m, cost a small fraction of the
similarly-sized REMUS 600, which costs $2.8 million [26].
Individual systems are
themselves modular, as well as mission systems. Different types of UUVs can be used
to accomplish different mission objectives, and several types can be used in pursuit
of a single mission.
The migration of naval weaponry from complex, integrated systems to simpler,
modular systems that accomplish specific jobs signals that disruption at work. It is
vitally important to maintain a force of the best warships able to maintain global
superpower position, justifying the continued construction of large vessels. However,
it is just as important to utilize disruptive innovations to save lives and resources.
Unmanned underwater vehicles are a means to reduce costs and risk to human life
and valuable equipment. The modular approach of UUV systems to mission completion is important. In Chapter 3, I demonstrate the significant cost savings available
through using UUVs instead of manned systems. As force multipliers, UUVs provide
clear roads to improved capabilities at lower costs, a point particularly relevant when
budgets are tight.
The U.S. Navy recognizes the revolutionary nature of UUVs and has invested in
UUV research over many years. Other navies have also invested in UUVs because
of their low cost and unique attributes and capabilities. Thailand and Malaysia are
interested in inexpensive UUVs for anti-submarine warfare training [25] and reconnaissance [27]. China is also pursuing its own unmanned underwater vehicle program
[28] with their own research facility modeled on MIT's Woods Hole Oceanographic
Institution [29]. Other nations pursuing UUV programs include Russia, India, Singapore, France, Norway, Germany, Sweden, the United Kingdom, and Israel [30]. Other
33
groups are also pursuing unmanned underwater vehicles development, including drug
cartels [31].
Terrorists could use UUVs to attack undersea oil platforms, network
infrastructure, and maritime commerce [32]. The low costs and simple, modular designs of UUVs are attractive attributes to countries and other groups lacking funding.
As they build UUVs and gain experience, they will become increasingly adept at using UUVs to further their causes, creating force asymmetries.
The United States
must continue to invest in UUV research if it is to remain at the head of the pack
in developing unmanned maritime technology. Otherwise, other nations and entities
will outpace the U.S. Navy in unmanned development, a risky proposition for future
armed conflict.
Unmanned underwater vehicles are disruptive to manned surface and subsurface
vessels. Though they are not currently capable of competing with ships and submarines in many aspects (payload size, speed), they are rapidly improving. At the
same time, their strengths target the weaknesses of manned vessels.
They move
silently and are difficult to detect. They can be launched and perform missions from
shore, surface, and submarine platforms at sizable standoff distances and from depth.
Advanced sensor suites allow them to perform reconnaissance with better results than
manned platforms [33]. Advances in autonomy, energy systems, and underwater communications will further drive UUVs toward high-end applications, most importantly
through weaponization. While there will always be missions that require the use of
large manned vessels, UUVs will increasingly displace as well as threaten them. The
lack of risk to personnel and high-value equipment in using UUVs will give them
advantages in engagements with manned vessels.
Unmanned underwater vehicles will soon become absolutely necessary in maintaining maritime superiority.
2.3
Battlefield Entropy
Entropy, in its most general sense, measures disorder [34]. While it is defined in many
ways, one relevant definition is that entropy S is the difference between the energy E
34
in a system and the amount of that energy Q that is available to do work [35]:
S= E- Q.
(2.1)
In other words, not all energy in a system can be used effectively. Some of it will be
lost due to disorder in the system, which can be measured by entropy.
A similar measure of disorder can be used to characterize the situation of a battlefield entity. Battlefield entropy may be defined as the difference between an entity's
ideal fighting potential and its actual combat effectiveness. Even if a combat entity
possesses superior force, or is not experiencing attrition, its combat effectiveness will
decrease as the entropy it experiences increases. For example, laying a minefield raises
battlefield entropy against a fleet of ships. Even if the ships are state-of-the-art vessels and no ship is damaged during transit, a minefield will inevitably slow the fleet's
progress and prevent the use of its full capabilities. The higher entropy experienced
by the fleet hinders the use of its full effectiveness against an enemy.
All effective weapons increase battlefield entropy for the opposing party. In describing battlefield entropy, I take a general definition of weapons and weapon systems
to be any use of force, including:
" manpower
" platforms, vehicles, and vessels
" munitions
" defense systems
" electronic and psychological warfare
" information
" tactical movements in time and space.
35
2.3.1
Measuring Battlefield Entropy
The three dynamics of combat are space, time, and force [36].
Battlefield entropy
finds its roots in these three principles, and may be raised along three interdependent
axes:
1. Geography (space)
2. Availability (time)
3. Difficulty (force).
Weapons technologies may be evaluated for their effectiveness based on the manner
in and degree to which they increase battlefield entropy for the opposing party. Any
effective weapon technology will excel along one of these axes, as shown in Fig. 2-2.
The most effective and useful weapons and systems excel in all three, as represented
by the red cube furthest from the origin in Fig. 2-2.
Geography
Figure 2-2: Battlefield entropy as a measure of weapon effectiveness
Each axis is characterized by three metrics that define superiority along that axis.
Improving in these metrics increases battlefield entropy.
36
Geography
Geography denotes the distribution of weaponry on the battlefield.
1. Distance - The standoff distance offered by the weapon between the user and
target. For example, a cruise missile offers significant standoff distance between
the launching vehicle and the target, making engagement difficult for the target.
2. Area - The distance between weapon systems. The broader the area across
which the weapons are spread, the more difficult it is to engage and neutralize
them.
Scattered resources and operatives has made it difficult to dismantle
terrorist organizations.
3. Precision - The weapon's ability to strike a narrow target area with accuracy
and minimal collateral damage.
Laser-guided weapons are significantly more
effective than wide-area bombing. Snipers are valued for similar capabilities.
Availability
Availability denotes the distribution of weaponry dependent on de-
ployment constraints.
1. Cost - The cost involved in using the weapon, including the monetary cost of
production and deployment, as well as any political costs. The AK-47 has been
widely used due to its low cost. Nuclear weapons were not only expensive to
develop, but the political costs are so high that they have been used only twice.
2. Rate - The rate at which the weapon can be used, limited by weapon production, transport, or deployment rates. For example, only two atomic bombs had
been built in August 1945, and another strike would have had to wait several
months for another bomb to be built. Also, systems travel at different speeds
and have varying loiter times.
3. Flexibility - The amount of variance and flexibility in the weapons systems
deployed.
There are, for example, myriad types of sea mines. They can be
intermingled with one another, making them even more difficult to disarm. The
use of multi-mission vehicles (such as destroyers, which can hunt submarines,
37
launch cruise missiles, and perform other missions) also increases the battlefield
entropy experienced by an enemy.
Difficulty
Difficulty denotes the amount of force the weapon system unleashes, and
the difficulty the target experiences in countering the effects of the weapon.
1. Detection - The difficulty experienced in detecting and identifying the weapon
system. The more difficult it is to detect a weapon, the harder it is to defend
against it. For example, stealth aircraft offer significant advantages in battle
over traditional, easily detected aircraft. Jungle warfare is difficult because it
is easy to conceal weapons.
2. Indefensibility - The difficulty experienced in preventing the weapon from
striking its target. Anti-tank barriers are very effective in protecting against
tank action, but are useless against air defenses. The SR-71 was designed to
evade air defense systems deployed by the USSR.
3. Destructiveness - The difficulty experienced in minimizing the damage caused
by the weapon. Large bunker-busting bombs are effective because their destructive power is difficult to deflect.
Decreasing Battlefield Entropy Battlefield entropy is conserved among opposing forces. Weapons that increase the entropy experienced by an opponent correspondingly decrease the entropy experienced by the user. It follows that an opposing
force may deploy its own weapons or defensive systems to decrease the effects of its
opponent's weapons and decrease the battlefield entropy it experiences. An effective
defense will affect metrics to decrease entropy to a point where an opponent's weapon
loses its effectiveness. Using weapons arid innovations that increase the likelihood of
detection, decrease a weapons destructive effects, or prevent a weapon from reaching
its target are all ways to decrease battlefield entropy.
For example, UAVs have proven effective in killing terrorists and their leaders by
raising battlefield entropy over previous systems by improving along several metrics
38
on each characteristic axis. Unmanned aerial vehicles are more difficult to detect,
precise, low (monetary) cost, and (due to long loiter times) offer near immediate
strike capability. Terrorists are able to decrease the entropy they experience, and
have thereby raised the entropy the U.S. Military experiences in pursuing them, by
improving their own systems on metrics along each characteristic axis.
Terrorists
defend against UAV strikes by hiding in bunkers to decrease destructiveness, increasing political costs by using human shields, and spreading their operations over large
areas.
Innovations that decrease battlefield entropy abound. Electronic warfare has been
effective in decreasing battlefield entropy because it increases weapon precision and
the likelihood of detecting enemy weapons. Missile defense systems aim to prevent
nuclear warheads from ever reaching their targets. Bunkers and bomb shelters reduce the (lestructiveness of a bomb. Unmanned aerial vehicles increase the standoff
distance (the pilot is halfway around the world), decreasing the value of air defenses.
Any useful defensive technology or innovation will represent a negative change along
the characteristic axes of battlefield entropy for the user of that innovation.
2.3.2
Evaluating Military Innovation in Terms of Battlefield
Entropy
Weapons technologies may be evaluated in their effectiveness by measuring the degree
to which they increase the battlefield entropy experienced by the opposing combatant
group. The higher the battlefield entropy induced by the weapon, the harder it is for
the opponent to counter its effects, resulting in a decrease in the effectiveness of the
opponents own weaponry. The most effective and broadly used weapons will have
high scores along all three axes. For example, terrorist attacks using IEDs are so
effective because the entropy presented is debilitatingly high for the party trying to
prevent the attack. Terrorist attacks can be effective against a wide range of targets,
are destructive to property and morale, and present a low cost to terrorist groups.
Weapon systems can be compared to each other based on the entropy they can
39
produce on the battlefield. The greater a weapon's distance from the origin, the more
effective and useful the technology, and the greater its merit for investment in its
development. There is no absolute measure for distance along the axes; rather, the
metrics should act as guides, and comparisons are relative.
It is also possible to rate the value of marginal investment into the weapon based
on the marginal improvement in increasing the battlefield entropy experienced by an
opponent. Mature technologies will see their marginal changes in battlefield entropy
approach zero per unit of investment, signaling an opportunity for disruptive military
innovation. Disruptive innovation in a component of a weapons system can represent
a significant change in the entropy produced by that weapons system. Such an innovation, on which subsequent innovation and significant changes in battlefield entropy
hinges, is a keystone innovation.
Nuclear weapons, at first glance, appear to be the most effective weapons in any
arsenal. However, through the lenses of battlefield entropy, their true effectiveness
can be ascertained over time. When first developed, nuclear weapons were seen as
highly destructive weapons that worked over large areas. They were prohibitively
expensive to develop and difficult to build. Subsequent research lowered monetary
costs, increased production capabilities, and improved the reliability of delivery. Research was also important in countering their indefensibility: by mutually assured
destruction, the possession of a nuclear arsenal prevents their use by another entity.
However, the political costs associated with nuclear warfare are so high that they
have never been used since WWII. In fact, other weapon systems developed in that
time have proven to be much more effective, and see much broader use today. The
theory of battlefield entropy shows that while nuclear weapons are necessary as a
deterrent, research is (and has been) better invested elsewhere. The marginal change
in battlefield entropy per dollar of research in nuclear weapons is nearly zero (one can
destroy the earth and humanity only once).
Submarines were disruptive when first widely deployed in WWI. Though slow
and lacking significant firepower, they were difficult to detect and defend against.
By WWII, their firepower and range had improved, as well as their survivability.
40
Submarines were maturing as a technology until the disruptive use of nuclear power.
Nuclear reactors, expensive yet long-enduring, catapulted submarines along the sustaining innovation curve. It was a keystone innovation. Subsequent research enabled
by use of nuclear power (such as the use of cruise missiles) appreciated a significant
marginal change in battlefield entropy, with further improvements in destructiveness,
indefensibility, and difficulty of detection, as well as range and flexibility. A disruptive
innovation provided for a cascade of sustaining and disruptive innovations within the
submarine space, providing for significant changes in battlefield entropy.
Battlefield Entropy and Disruptive Innovation
Any disruptive military inno-
vation will represent an improvement in a metric on one of these axes while (at least
temporarily) seeing decreased performance in a different metric in which an existing platform excels. For example, UAVs, a disruptive military technology, improved
along the metrics of distance, cost, rate, and detection. However, they have been
less superior than the manned aircraft they have displaced in terms of flexibility and
destructiveness.
Disruptive products improve through sustaining innovation until they displace the
existing products that once dominated the market. From the standpoint of battlefield
entropy, sustaining innovation can improve performance along the metrics in which
the product already excels. For example, UAVs will become more difficult to detect
and have longer loiter times. Sustaining innovation can also improve performance
along the metrics in which the product is lacking in comparison to existing solutions.
For example, UAVs will continue to be equipped with more powerful munitions,
increasing their destructiveness. In either case, sustaining innovation increases the
battlefield entropy experienced by an opponent.
Evaluating a potentially disruptive innovation in terms of battlefield entropy can
identify new performance metrics that will demonstrate the value of the innovation
in combat. As mentioned, disruptive innovations often represent changes in market
application rather than technological improvement. New applications of innovations
in war fighting can be evaluated using battlefield entropy as a measure. New appli-
41
cations could be identified that would otherwise be missed.
The theory of battlefield entropy lends urgency to the adoption and skilled management of disruptive innovation. In the realm of disruptive innovation, even small
research and application wins can represent significant changes in the battlefield entropy that the entity will experience. Being a first mover in disruptive innovations
provides significant advantages on the battlefield in increasing combat effectiveness
and changing entropy. A larger power that only sees a smaller immediate change in
its battlefield entropy is still motivated to prevent smaller powers from using a disruptive innovation to see a significant change in the smaller power's battlefield entropy.
Such a large change in relation to current battlefield entropy levels can upset tactical
balance and dynamics.
2.3.3
Battlefield Entropy and UUVs
The theory of battlefield entropy demonstrates the disruptive nature of UUVs, and
also highlights their potential as an effective weapon. Unmanned underwater vehicles
are an opportunity for the U.S. Navy to decrease the entropy it experiences while
simultaneously increasing the entropy it projects on to its opponents.
Unmanned underwater vehicles represent improvements in a metric along all three
characteristic axes. They increase standoff distances and the area over which forces
are spread; they are low cost, they are easy to produce, and it is easy to design varying types of UUVs for different mission types; and UUVs are more difficult to detect
and protect against. The vehicles also assist in detecting threats (reconnaissance missions), provide means to deactivate other weapons (mine hunting), increase precision
(higher quality oceanographic data). Unmanned underwater vehicles both increase
entropy for the opposing party and decrease entropy for the launching party. Subsequent sustaining innovations promise to enhance the performance of UUVs along the
characteristic axes of battlefield entropy.
While they excel along some metrics (offering superiority over existing solutions),
UUVs are not as capable along other metrics. They are slow, offer almost no destructive power, and are not multi-mission vehicles (taking a different approach to offering
42
flexibility, which is their modular architecture). Unmanned underwater vehicles are
a disruptive innovation, and sustaining innovations will improve the performance of
UUVs along the aforementioned metrics.
Unmanned underwater vehicles are a new technology, but their original features
and effect on battlefield entropy promise high returns on research investment.
For
a marginal unit of research investment, the marginal change in battlefield entropy
will be high.
There are few opportunities available where a little can go so far in
increasing combat effectiveness.
Long-term power sources for UUVs, are a keystone innovation. The advent of nuclear power in submarines launched a cascade of innovation that accelerated the battlefield entropy capability of submarines. Developing long-endurance power sources
for UUVs, such as the aluminum power source being researched and built at MIT,
will precede a similar flood of sustaining innovation that will see the effectiveness of
UUVs multiplied. The relatively small investment in long-term energy source research
will be rewarded with a significant change in battlefield entropy due to not only the
use of the long-term power source, but the subsequent applications for which it provides. Longer UUV missions offering more power for vehicle subsystems will further
increase the distance and area a UUV can cover, improve its flexibility, and make
them more difficult to defend against. Other technologies and missions that cannot
be currently envisioned will also be developed to take advantage of UUVs powered
by long-term power sources.
Such innovations will produce significant changes in
battlefield entropy.
The U.S. Military is not the only group that will realize and invest in the potential
of UUVs to change battlefield entropy. While early changes in battlefield entropy
provided by UUVs may seem small, they will represent an investment in the significant
changes that will follow.
The changes in battlefield entropy will also represent a
greater change than that which is available from investing in sustaining innovations
for other, more mature technologies. Furthermore, early investment in UUV research
and effective management of this innovation prevents the first mover advantage from
going to other groups that will see a significant change in their battlefield entropy
43
from small research investments and successes.
2.4
Managing Disruptive Innovation
The disruption of manned naval operations by UUVs presents an opportunity inside
of a problem. While they will undoubtedly prove a threat to the U.S. Navy in future conflicts, UUVs will also provide solutions to new threats and adapting enemies,
including the use of UUVs against the United States. Adept management of this disruptive innovation will ensure the U.S. Navy's dominance of the seas. War tends to
accelerate the process of pursuing and adopting disruptive innovations, as the desperation and values (solutions trump proceedure) that come with war are conducive to
disruptive innovation. Effective management of disruptive innovation during peace
seems to be more difficult. However, it can pay off drastically when major armed
conflict arises. Limited involvement in smaller conflicts (such as police actions) often
provides opportunity to test and refine disruptive military technologies. For example,
the German army tested Panzer tanks and fighter aircraft in the Spanish Civil War in
the 1930s before their devastating deployment in WWII [37, 38]. The United States
utilized UAVs in Kosovo before their use in Iraq and Afghanistan [39].
In addition to describing the problems established firms encounter in confronting
disruptive innovations, Christensen and others have used the theory to develop methods of harnessing disruptive innovation successfully (most notably in The Innovator's
Solution [8] and The Innovator's Guide to Growth [40]). There are four sets of theories and best-practices that guide organizations in managing disruptive innovation to
their advantage.
1. Jobs-to-be-done Theory
Jobs-to-be-done theory is best summarized as, "People don't need quarter-inch
drills. They need quarter-inch holes." The theory suggests that when designing
product features, it is best to use a use-case scenario as a guide. Disruptive
innovations are particularly difficult to direct and manage since they are new
and their market applications categorically unknown. Rather than building a
44
one-size-fits-all product, it is better to determine what job or task needs to be
done, and how the product can be optimized for that task. Focusing on a job
that needs to be done will establish performance metrics that will highlight the
abilities of the disruptive innovation. Jobs do indeed change over time, but this
theory is critical in limiting feature creep and building a product that will be
useful immediately (starting at the low end and then beginning to move toward
higher performance).
2. Market/Application Identification
When identifying applications or "customers" of products, it is important to
identify situations in which the current solution is overkill.
For example, a
powerful desktop computer is not needed to surf the internet. A tablet can
do that job just as well, but more conveniently and for a fraction of the cost.
Alternatively, it is important to look for problems to which there is no practical
solution (i.e.
where nonconsumption prevails).
For example, there was no
practical way to have music-on-demand until the phonograph was invented.
Remember that disruptive innovations are almost always market application
problems, not technology problems.
3. Discovery-driven Planning
Disruptive innovations compete in poorly defined markets, and the best designs
and market applications are not readily known at the beginning. Innovators
must quickly build products, test them, and learn from their experiments, applying their new knowledge to make better products and discover the most
ready customers. Minimum viable products (MVPs), which have only the most
basic core functionality that offers the disruptive value-adding feature, are the
best path forward, rather than building the perfect product that is completely
ready for global use
[41].
Even in the military, where hierarchy and processes are
necessary and effective, getting experience quickly and seizing the first-mover
advantage is critical in capitalizing on disruptive innovations [42]. Solutions to
technology problems present themselves as experience is gained and sustaining
45
innovations completed.
4. Resource-Process-Value Theory
Resources include assets, cash, intellectual property, brands, and people. Processes are the organization's established ways of doing things, such as how
project funding decisions are made. Values are the priorities that inform the
processes. To effectively implement disruptive innovations, organizations must
have resources, processes, and values that can take advantage of disruptive
products. In almost all cases, established organizations have processes inadvertently designed to snuff out disruptive innovation (since disruptive innovations
are not necessarily part of a core competency and their markets are not well
understood). It is best to create an independent subsidiary that has its own
resources, processes, and values that are suited to the disruptive innovation.
2.4.1
Military Disruption Case Study: UAVs
The aforementioned theories can be easy to understand, but difficult to apply in
practice. I will give a case study of UAVs to show how a disruptive innovation was
well managed by the military over the course of several decades, leading to their
current success as a key part of the War on Terror.
Unmanned aerial vehicles had their beginning in camera-equipped balloons in the
Spanish-American War, and remotely-operated airplanes were tested during WWI
[43]. Before and during WWII, unmanned aircraft saw use as practice targets, and
Germany developed the V-1, the precursor to the modern cruise missile. The use
of UAVs for reconnaissance began in the 1960s, and thousands of flight hours were
logged over Vietnam [43].
Reconnaissance was an ideal first application, as using
manned aircraft was overkill.
In addition, reconnaissance valued the strengths of
UAVs, even while UAVs were not ready for full combat. They were inexpensive,
reduced risk to pilots, were difficult to shoot down, and could provide persistent
intelligence. During the Yom Kippur War, Israel used American Ryan Firebees by
tricking Egypt into firing all of its anti-aircraft missiles at the UAVs, allowing Israeli
46
pilots to fly uninhibited [43]. A perfect application of jobs-to-be-done theory, Israel
creatively found an offensive use for an unarmed, relatively incapable UAV by seeing
that it filled a job perfectly: depleting air-defense systems without endangering pilots.
As the military gained experience with UAVs, the systems themselves became
more advanced, capable of carrying larger payloads at greater speeds. Rather than designing complete solutions (armed unmanned aircraft that are multi-mission), UAVs
were designed with single missions in mind, and designed to fulfill the most basic requirements to accomplish the job. Through experimentation and creative use, UAVs
were developed organically, culminating in the development of the Predator drone in
the mid-1990s [43].
The Predator solved the nonconsumption of persistent aircraft battlefield surveillance. Predators were used in various policing actions, but saw their first widespread
use over Afghanistan and Iraq [43]. Due to difficulties in taking advantage of UAVs
through traditional organizational structures [44], and recognizing their unique attributes and abilities, the Army established Task Force Odin to oversee and direct
the use of surveillance drones [45]. The task force has allowed combatants to develop
new tactics and methods for using UAVs by providing space for experimentation
and improvement, protected from procedures that could deter innovation. As their
capabilities improved, UAVs were armed with Hellfire missiles, and they have now
successfully completed tens of thousands of sorties [46].
UAVs are still not perfect. They are slow, have limited weaponry, and are unable
to fly in rough weather. They are, however, well suited to providing persistent surveillance and strike capabilities. Their continued use and expanded experimentation will
continue to allow them to move to higher-end missions, freeing manned aircraft to
complete more difficult, higher-value missions.
2.4.2
Disruption Lessons Learned
From the UAV disruptive innovation case study and the disruptive innovation theories
and best practices, I summarize several key lessons learned.
47
1. Find jobs that need to be done and build products that are capable of completing
those specific jobs. Use the job to establish new performance metrics for new
products that are distinct from traditional solutions. Fighter jets needed to be
fast and survivable. The job demanded a craft that is easily replaceable with
long mission durations, things that UAVs are good at.
2. One type of application ready for a disruptive innovation is a case where the current solution is much more complex and expensive than it needs to be. Manned
aircraft were not needed to do battlefield surveillance. Though UAVs were much
simpler, they were also less expensive and did the job satisfactorily.
3. Experimenting and gaining experience with iterations of the product was successful. If the military had waited for a full-blown remote-control fighter jet, it
still would not be using UAVs, and would not have experienced the successes it
has seen thus far. The experimentation has accelerated sustaining innovation
to make UAVs better. When first developing UAVs, it is unlikely that their
current use-case was envisioned.
4. Forming a separate task force responsible for new processes and values accelerated, and even facilitated, the UAV system as it is now known. Experimentation and organic growth need space. Classic Air Force chain of command and
budget allocation strategies would have dismissed tactics developed for UAVs
as inferior. A disruptive innovation needs independence and protection from
traditional products to reach its full potential.
5. Modularity is a key advantage of disruptive innovations. The modularity of UAV
systems, and the breadth of UAV types used to accomplish different missions, is
one of their strengths, and has helped current capabilities to grow organically.
A one-size-fits-all UAV would be inappropriate, and modularity allows the focus
to remain on the job to be done, lowering costs and increasing the likelihood of
mission success.
48
2.5
Potential UUV Missions
Based on jobs-to-be-done theory, and searching for technology application potential
in missions that are overshot or not currently accomplished, I identified nine missions
(listed in Table 2.1) that are ideal for UUVs. I present these missions as possible using
current technologies. I relied heavily on the Navy's 2004 UUV Masterplan [9] and
Rand's Survey of Missions for Umanned Undersea Vehicles [47] (for more detail, see
Appendix A). In keeping with the classification system used in these publications, I
have grouped them according to mission type, though there is overlap between types
of missions. Further, I want to encourage cross-mission thinking in UUV use and
application.
Table 2.1: Analyzed Missions
Category
Mission
CBNRE detection
ISR
support)
Near-land and harbor monitoring (including SOF
Array deployment
Oceanography and Bathymetry
MCM
Mine detection, classification, identification, and neutralization
ASW
Hold-at-risk
ASW training
I&I
In-water survey and hull inspection
Monitoring undersea infrastructure
Intelligence, Surveillance, and Reconnaissance (ISR)
1. Chemical, Biological, Nuclear, Radiological, and Explosive (CBNRE)
Detection
Identifying and mapping contaminant plumes using UUVs as platforms for underwater mass spectrometers.
2. Near-land and Harbor Monitoring
49
Gathering battle-space intelligence, including harbor activity and conditions,
possible landing sites, and identifying threats of detection.
3. Array Deployment
Clandestine deployment of surveillance sensors and sensor arrays for long-term
reconnaissance.
4. Oceanography and Bathymetry
Battle-space intelligence gathering, including ocean conditions and bathymetry.
Mine Countermeasures
5. Mine Hunting
Detecting, identifying, classifying, and mapping mines for clearance.
Anti-submarine Warfare
6. Hold-at-risk
Monitoring submarine choke points, such as harbor entrances, for submerged
submarine activity and taking action when necessary.
7. ASW Training
Mimicking enemy submarine sound signatures and maneuvers to train crews in
ASW.
Inspection and Identification
8. In-water Survey and Hull Inspection
Performing inspections for attached drug containers and limpet mines. Also
performing routine maintenance inspections.
9. Monitoring Undersea Infrastructure
Inspecting cables and pipelines critical to global naval operations.
50
Chapter 3
Mission Cost Analyses
To demonstrate the impact of disruptive innovation on costs and mission risk, I compare current ship-based and UUV concepts of operation (CONOPs) and costs. I describe how using UUVs is advantageous and takes advantage of their unique strengths
along new performance metrics. Some UUV CONOPs discussed are presently carried out by UUVs, while others are possible using currently available technology. In
this chapter, I describe total costs from a high level. For cost calculations and more
specific CONOP information, see Appendix B.
The cost advantages of using UUVs are summarized in Table 3.1. I present the
costs of traditional manned system CONOPs, UUV CONOPs (battery-powered and,
where appropriate, aluminum-powered), and the cost savings available using UUVs
(as if the UUV price was a sale discount on manned systems costs). I also present the
cost savings of aluminum-powered UUVs over manned systems and battery-powered
UUVs for appropriate missions in Table 3.2.
3.1
3.1.1
CBNRE Detection and Localization
Mission Description
Underwater mass spectrometers (UWMSs) have been demonstrated that are capable
of detecting CBNRE materials under water [48, 49]. Unmanned underwater vehicles
51
equipped with UWMSs could detect, localize, and track plumes in littoral, harbor,
and open-ocean conditions. These missions would contribute to Homeland Security,
maritime ecological research, and environmental disaster response efforts. Compared
to larger research vessels and buoy networks, UUVs offer higher sampling rates, characterization at a variety of depths, the ability to focus on a region of interest, and
greater mobility. Unmanned underwater vehicles could also be employed in places
where environmental monitoring is critical but difficult.
3.1.2
Manned System CONOPs and Costs
To collect CBNRE data on the high seas, a UWMS would be towed behind a T-AGOS
vessel [48]. The equipment would be able to take one series of measurement profiles
per mission, and ship utilization for that mission would be high. For a representative plume detection and localization mission lasting 14 days (gathering 3,360 data
profiles), the total mission cost would be $3,842,000. The cost per profile would be
$1,100.
3.1.3
UUV CONOPs and Costs
A REMUS 600 vehicle equipped with a similar UWMS would be deployed from the
same type of T-AGOS ship. Three UUVs could be simultaneously deployed, and the
ship could compete other missions while the UUVs operated. Over the fourteen days,
9,960 profiles would be collected. If the UUVs run on batteries, the total mission
cost would be $791,000, or $79 per profile, which is 93% cost savings over ship-based
CONOPs. If the UUVs run on an aluminum power source, the total mission cost
would be $287,000, or $28 per profile. The cost savings are 98% over those with
a ship-based CONOP, and 64% savings over those with a battery-powered UUV
CONOP.
52
3.2
3.2.1
Near-land and Harbor Monitoring
Mission Description
Tracking UUVs is difficult, making them well suited to clandestine reconnaissance missions. For this reason, they are ideal for monitoring harbors and other shallow-water
targets in denied areas. They are able to monitor harbor traffic, as well as provide information on mine-laying operations, other defense preparations, and oceanographic
information on the region. One particular mission is in completing these activities
in support of SOF operations [47].
Unmanned underwater vehicles would identify
areas with low activity, warn SOF operants of threats of detection, and monitor SOF
supply caches, as well as survey the area before action. Support of SOF missions was
demonstrated during Exercise Giant Shadow using a Navy Seahorse UUV [50].
3.2.2
Manned System CONOPs and Costs
Navy SEAL operators are frequently called upon to perform clandestine monitoring of
high-value targets. Traveling in small submersibles called swimmer delivery vehicles
(SDVs) launched from submerged attack submarines [51], they transit for up to eight
hours to reach their area of interest [52] and then loiter for several hours, completing
their mission before returning to their host platform. Aircraft carriers and backup
SEAL teams provide mission support [51]. The total mission cost for four hours at the
target is $2,374,000, or $594,000 per loiter-hour. To achieve a total loiter time of 24
hours, six missions would be required, costing $14,244,000. In the case of a long-term
monitoring operation lasting 14 days, a mission requiring insertion and recovery of
a SEAL team, total costs would be $6,089,000, or $18,000 per loiter-hour. As is the
case with most missions requiring the use of special operations forces, mission risks
and threat to human life are very high. These missions are (and should be) only
performed in the most demanding, high-value situations.
53
3.2.3
UUV CONOPs and Costs
A UUV can be (and has been [50]) used to accomplish similar missions. Launched
from a ship or submarine, the UUV could travel to the monitoring area and remain onlocation for long periods with low risk of detection. Using a battery-powered REMUS
600, the total cost for four loiter hours would be $212,000, or $53,000 per loiter-hour,
which is 91% cost savings over using manned systems. A mission requiring 24 hours
at the target would cost $216,000 ($9,000 per loiter hour), which is 98% cost savings
over using manned systems.
For the long-term, 14-day deployment, a REMUS 600 equipped with an aluminum
power source could be used. The mission would cost $266,000, or $791 per loiter-hour.
The cost savings over manned systems would be 95%.
In both instances, not only are operational costs far lower, but human lives are
not put at risk. Mission failure would be the loss of a $2.8 million submarine, a small
price compared to the loss of highly trained SEAL operators. In addition, UUVs are
difficult to track and present a much lower risk of detection by enemy combatants,
further lowering mission risk, especially for clandestine reconnaissance missions.
3.3
3.3.1
Array Deployment
Mission Description
While UUVs are a mobile reconnaissance force, the Navy also uses stationary sensor
arrays to detect and track submarines, surface ships, and mine laying in a given area.
Deployment of these arrays in denied areas is currently achieved by using manned
systems, in many instances by SEAL forces and the SEAL Delivery Vehicle (SDV)
[51]. Unmanned underwater vehicles would be able to complete the same mission in
a simpler manner with less risk to human life and decreased chance of detection. The
Advanced Distributed System (ADS), previously under development by Lockheed
Martin, was deployed in tests using an UUV [47].
54
3.3.2
Manned System CONOPs and Costs
In 2003, teams of four Navy SEALs completed a series of missions deploying cameras
in Somalia to track terrorist training [51]. Similar to harbor monitoring CONOPs,
SEALs travel in SDVs for long periods to reach the target area, deploy the sensors,
and then return to the submerged submarine from which they were launched [521. An
aircraft carrier and backup SEAL team provided support [51]. The average time on
location was three hours [51], and the total mission costs were $2,233,000, or $744,000
per hour at the target.
3.3.3
UUV CONOPs and Costs
To avoid risking human lives, the LDUUV (or other, UUVs) could perform a similar sensor deployment mission in its current configuration. The LDUUV would be
launched from a submarine and travel to its target before deploying the array and
returning to be retrieved [47]. Total mission costs would be $271,000 ($271,000 per
installation hour), which is 88% cost savings over manned systems CONOPs.
3.4
3.4.1
Oceanography and Bathymetry
Mission Description
The Navy depends on complete, accurate, and precise oceanographic data when planning operations.
Data such as temperature gradients, gravity measurements, and
salinity are important to communications and weapons use. Surveys of the ocean
floor (bathymetry) are also vital, as accurate charts are needed for safe navigation
at and below the surface. Unmanned underwater vehicles are capable of providing
frequent and accurate oceanographic data points on demand across large areas and
at varying depths [53]. Because of their ability to operate untethered at depth, UUVs
provide more accurate, higher-resolution maps of the ocean floor, and can make maps
more efficiently by using tighter scan patterns and multiple vehicles [54]. Numerous
UUVs have been demonstrated as effective oceanographic platforms, including gliders
55
and AUVs [53, 55]
3.4.2
Manned System CONOPs and Costs
In the case of water column profiling, an excellent case study is the Navy's 2005 Exercise SHAREM 150.
During this exercise, T-AGOS ocean surveillance ships and
helicopter-deployed systems (launched from aircraft carriers) captured 386 traces
over 22 days [47, 53].
The total mission cost for providing oceanographic data was
$4,780,000, or $12,000 per profile.
For a bathymetric mission, a T-AGOS ship would tow an Orion side scan sonar
tow fish at low speed. Swath width depends on the required resolution: 300 m for
torpedo-sized objects (high-resolution), 1,800 m for aircraft debris fields (mediumresolution), and 3,000 m for bathymetry (low-resolution) [56].
For high-resolution
scans over a representative 20 km2 [33], mapping takes 25 hours and the total costs
are $317,000 ($16,000 per kM2 ). For medium-resolution scans over a representative
6000 km 2 [57], mapping takes 1,100 hours (46 days) and the total costs are $14,324,000
($2,387 per kM2 ). For low-resolution scans over a representative area of 17,000 km 2
[57], mapping takes 1,900 hours (66 days) and total costs are $24,330,000 ($1,431 per
kin 2 ).
3.4.3
UUV CONOPs and Costs
During the aforementioned Exercise SHAREM 150 in 2005, a team of four Slocum
gliders were used to gather oceanographic data. The gliders took 4,782 profiles over
the 22-day exercise. The total glider mission cost was $190,000, or $40 per profile.
Cost savings were 98% over manned systems.
Bathymetry was one of the earliest applications of UUVs.
Three REMUS 600
vehicles could be launched from a T-AGOS vessel and map the same representative areas. For battery-powered REMUS vehicles, the high resolution scans take 27
hours and total costs are $76,000 ($3,787 per km 2 ), which is 76% cost savings over
manned systems. Medium resolution scans take 456 hours (19 days) and total costs
56
are $1,070,000 ($178 per km 2 ), which is 93% cost savings over manned systems. Low
resolution scans take 772 hours (32 days) and total costs are $1,813,000 ($107 per
kin 2 ), which is 93% cost savings over manned systems.
For aluminum-powered REMUS vehicles, the medium resolution scans take 411
hours (17 days) and total costs are $352,000 ($59 per km 2 ), which is 98% cost savings
over manned systems and 67% savings over battery-powered REMUS vehicles. Low
resolution scans take 709 hours (30 days) and total costs are $517,000 ($30 per km2)1
which is 98% cost savings over manned systems and 71% cost savings over batterypowered REMUS vehicles.
3.5
Mine detection, classification, identification, and
neutralization
3.5.1
Mission Description
Systems such as the REMUS 100 have already begun service as mine hunters, replacing divers and marine mammals in mapping minefields during the 2003 invasion
of Iraq [55]. While wide-area minesweeping is not currently within reach, UUVs are
highly capable in mine hunting, i.e. identifying mines, determining their position,
and removing them. Though slow, mine hunting is the most reliable mine clearance
method. The ATLAS Seafox is a German mine identification and neutralization vehicle. Easily deployed from a minesweeper, the Seafox can find, identify, and then
destroy mines [58].
Current mine hunting UUVs target floating and moored mines.
The Knifefish is an AUV capable of detecting, identifying, classifying, and mapping
bottom mines hidden on the seafloor [59].
3.5.2
Manned System CONOPs and Costs
For mine hunting, mine countermeasure vessels deploy teams of explosive ordinance
disposal (EOD) divers and specially trained dolphins.
It takes 2.5 man-hours to
detect, classify, and identify a mine, and the total cost per mine is $6,500.
57
3.5.3
UUV CONOPs and Costs
An LCS equipped with a MCM mission package will use the Knifefish to hunt mines.
Each mine requires 0.2 UUV-hours for detection, for a total cost of $529 per mine,
which is 92% cost savings over manned systems.
3.6
3.6.1
Hold-at-risk
Mission Description
Diesel-electric submarines are an attractive option to many nation-states in relation
to larger, more expensive nuclear-powered submarines.
Diesel-electric submarines
pose a significant risk to carrier and expeditionary strike groups due to their silent
operation and small footprint [60].
Crucial to ASW is knowing the location and
movement of enemy submarine vessels. Unmanned underwater vehicles will be able
to loiter at the openings of ports and at choke-points through which submarines
must pass [61], and critical systems tests for hold-at-risk missions have already been
completed [62]. When submarine activity is detected, the UUV may begin to track
and follow the enemy submarine until other systems can be mobilized. In addition to
tracking abilities, the threat of detection could potentially limit and frustrate enemy
submarine activity [9].
3.6.2
Manned System CONOPs and Costs
To effectively monitor a choke-point for a hold-at-risk mission, an attack submarine
would need to loiter in the area. For a representative mission of 28 days, the total
cost would be $20,917,000 ($31,000 per loiter hour). The high costs of using attack
submarines in hold-at-risk missions, and the limited availability of attack submarines,
make hold-at-risk missions impractical with manned systems.
58
3.6.3
UUV CONOPs and Costs
UUVs present a solution to the current nonconsumption of this mission. Unmanned
vehicles could be launched by a T-AGOS ship at a standoff distance and travel to the
choke-point.
A team of three REMUS 600 vehicles could monitor the choke point.
Battery-powered UUVs would need to return frequently for recharging, and total
mission costs would be $1,896,000 (2,800 per loiter-hour), which is 91% cost savings
over manned systems. Aluminum-powered UUVs would return less frequently, and
total mission costs would be $867,000 ($1,334 per loiter-hour), which is 96% cost
savings over manned systems and 54% cost savings over battery-powered REMUS
vehicles.
A team of seven Z-Ray gliders could cover a choke-point for the entire mission
duration and a mission cost of $782,000 ($1,164 per loiter-hour), which is 96% cost
savings over manned systems, 59% cost savings over battery-powered REMUS vehicles, and 10% cost savings over aluminum-powered REMUS vehicles. Z-Ray gliders
also have the advantage of being capable of even longer deployment times, making
mission extension simple and further decreasing per-hour loiter costs.
3.7
3.7.1
ASW Training
Mission Description
Realizing the risk of submarines to other submarines and to surface vessels, ASW
training is an important part of preparing combat readiness. United States nuclearpowered submarines are high-value assets and their availability for ASW training
situations is limited and expensive [47]. Joint exercises with (as well as renting submarines from) foreign navies is an alternative, but nevertheless not a perfect solution.
Costs are high, and availability for training is limited. Unmanned underwater vehicles
act as submarines for a subset of ASW training exercises. The MK 39 Expendable
Mobile ASW Training Target (EMATT) is used to mimic a diesel-electric submarine
by operating at various speeds, depths, and headings and emitting acoustic signa-
59
tures [63].
They provide essential experience both in on-range training and in the
open ocean.
3.7.2
Manned System CONOPs and Costs
In 2005, the United States leased a Gotland class diesel-electric submarine and her
crew from Sweden for training exercises. The training was successful and demonstrated vulnerability of Navy vessels to attack from diesel-electric submarines. For
a two-day training mission with the Gotland, the total cost the exercise would be
$527,000. Training with a SSN-774 for two days would cost $1,992,000.
3.7.3
UUV CONOPs and Costs
While use of actual vessels is effective and occasionally necessary, it is costly and
impractical. Unmanned vessels can mimic various submarines and provide training
for ASW crews. Using the MK-39 EMATT launched from the training vessel, two
days of training would require 7 EMATT units and costs would be $158,000, which is
70% cost savings over training with the Gotland and 92% cost savings over training
with a SSN-774.
Outfitted with the appropriate equipment, a REMUS 600 could also serve as
an ASW training target launched from the training vessel.
Total costs would be
$102,000, which is 81% cost savings over training with the Gotland, 95% cost savings
over training with a SSN-774, and 35% cost savings over using EMATTs.
3.8
3.8.1
In-water Survey and Hull Inspection
Mission Description
Countless cargo container ships enter U.S. territorial waters every day. The immensity
of the traffic makes it difficult to inspect every ship, creating a risk to national security.
Various items, including limpet mines and narcotics, can be attached to ship hulls
without the knowledge of the crew [64]. Divers currently do this dangerous, dirty work
60
with great difficulty due to currents and other vessels [65].
Unmanned underwater
vehicles could search the hulls of incoming ships to locate such threats, decreasing
risk to divers and increasing the number of inspections performed. In addition, their
ability to remain close to the ship increases the likelihood that they will be able to
detect a radiological source inside the hull, thereby further mitigating threats
[471.
Inspections of commercial and naval ship bottoms must be carried out regularly to
ensure safety. Every five years, two surveys must performed to identify damage, corrosion, and other potential problems. These surveys must be completed in controlled
conditions by certified divers under inspector supervision [66]. Unmanned underwater vehicles are currently under development that can quickly complete ship bottom
inspections in any condition, including murky water and the open ocean. These inspections can also identify foreign objects such as limpet mines. The use of UUVs
could greatly increase the rate of hull inspection, decreasing the amount of time away
from sea. Using UUVs will also increase safety and compliance with international
regulations and decrease inspection and repair costs.
3.8.2
Manned System CONOPs and Costs
As representative inspection subjects, I chose a Panamax and a DDG-51, and included
ship opportunity costs. Inspecting a ship hull for attached drug containers or limpet
mines takes about two hours for a team of six divers. Total costs for a Panamax
vessel are $17,000, and for a DDG-51 are $70,000.
A full inspection team of 17 divers inspect ships by swimming back and forth in
a row to cover the entire hull. Inspecting a Panamax vessel takes 5 hours and costs
$64,000. Inspecting a DDG-51 takes 3 hours and costs $112,000.
3.8.3
UUV CONOPs and Costs
Many police forces use ROVs to randomly inspect ship hulls for drugs and other
irregularities, greatly simplifying the inspection process and reducing risk to divers.
Inspecting a vessel takes about an hour [67]. Total costs for a Panamax are $8,000,
61
which is 54% cost savings over manned systems. Total costs for a DDG-51 are $34,000,
which is 51% cost savings over manned systems.
Bluefin's hovering AUV (HAUV) is designed to autonomously perform in-water
surveys on ship hulls. Inspecting a Panamax using two HAUVs takes three hours and
costs $21,000, which is a cost savings of 67% over using manned systems. Inspecting
a DDG-51 takes 1.5 hours and costs $51,000, a cost savings of 54% over manned
systems.
3.9
3.9.1
Monitoring Undersea Infrastructure
Mission Description
The U.S. Navy has invested heavily in undersea infrastructure to support is operations, including an extensive network of undersea monitoring stations and thousands
of miles of cabling [47]. Inspection and monitoring is important to maintain combat readiness, especially as systems age. Limited inspections are conducted by diver
teams and shipborne systems, leaving the rest of these critical systems un-inspected
and subject to damage from animals, fouling, weather, and enemy disturbances (for
example, divers cut Egyptian telecom cables in March 2013 [68]). A series of UUVs
have been used in industry to inspect underwater cabling and pipelines [69]. Their
roles can be expanded to include the extensive systems used by the Navy to monitor their infrastructure. Unmanned underwater vehicles could persistently monitor
undersea systems and alert personnel to damage or threats.
3.9.2
Manned System CONOPs and Costs
Undersea cables and pipelines are inspected using T-AGOS ships towing inspection
ROVs at low speeds. Mapping a representative distance of 400 km (a distance mapped
in 2000 by the Aqua Explorer 2000 AUV, a specialized cable inspection AUV [70])
takes 54 hours and total costs are $730,000 ($1,800 per km). A longer representative
distance (for example 4065 km, the distance from Nova Scotia to Ireland) would take
62
55 hours and cost $7,077,000 ($1,800 per km).
3.9.3
UUV CONOPs and Costs
UUVs such as the Aqua Explorer 2000 have previously inspected cables over long
distances. Total mission time would be 86 hours and total costs $102,000 ($254 per
km), which is 86% cost savings over manned systems. To inspect the longer distance,
an aluminum-powered REMUS 600 could be used. Total mission time would be 765
hours and the total cost would be $218,000 ($54 per km), which is 97% cost savings
over manned systems.
63
MCM
ISR
Type
Hold-at-risk
ASW Training
Mine-hunting
CBNRE
Water Column Profiling
High Definition
Mapping
Medium Definition
Low Definition
Harbor Monitoring
Array Deployment
Mission
Cost per m 2 inspected
Cost per m 2 inspected
Cost per km inspected
Cost per loiter hour
Cost per training hour
Cost per mine
Cost
Cost
Cost
Cost
Cost
Cost
Cost
per
per
per
per
per
per
per
Metric
$16,797
$6
$1,799
$20,916,651
$10,974
$6,450
$1,143
$20,858
$15,837
$2,387
$1,431
$593,509
$2,233,074
Ship
$7,695
$2
$254
$782,384
$2,135
$529
$79
$40
$3,787
$178
$107
$8,985
$270,716
UUV
54%
67%
86%
96%
81%
92%
93%
99%
76%
93%
93%
98%
88%
Savings
profile
profile
km 2
km 2
km 2
loiter hour
deployment
ASW
Hull Inspection Attached Materials
IullIn-water
Survey
Undersea Infrastructure
Table 3.1: Mission costs comparison between manned systems and UUVs
c-c
01
Medium Resolution
Low Resolution
profile
km 2
km 2
loiter hour
loiter hour
km
$1,143
$2,387
$1,431
$18,123
$31,126
$1,799
Ship
$79
$178
$107
N/A
$2,822
$254
$28
$59
$30
$791
$1,334
$54
UUV
Battery Aluminum
98%
98%
98%
96%
96%
97%
64%
67%
71%
N/A
53%
79%
Aluminum Savings
vs. Ship vs. Batteries
Table 3.2: Mission costs comparison between aluminum and non-aluminum power systems
Long-term Harbor Monitoring
Hold-at-risk
Undersea Infrastructure
Bathymetry
per
per
per
per
per
per
CBNRE
Cost
Cost
Cost
Cost
Cost
Cost
Metric
Mission
66
Chapter 4
Implications of UUV Adoption
My analysis of manned system and UUV CONOPs and costs revealed several interesting observations about the implementation and use of UUVs, particularly in a
disruptive manner.
4.1
UUVs offer significant cost savings
Chapter 3 highlights the extensive cost savings UUV CONOPs offer over manned system CONOPs. In examining the cost savings based on the meaningful metric for each
mission (for example, cost per km 2 mapped), I found that the average cost savings
was 88%. In other words, UUV operations are an order of magnitude less expensive than completing the same missions using manned systems. In many instances,
these savings per mission are on the order of millions of dollars. Unmanned systems
are often just as capable, if not better suited, to missions than are manned systems,
removing operational risk and protecting valuable human and naval assets. For example, UUVs are ideal for mine hunting operations due to their greater operational
endurance and reduced ship exposure [55]. Unmanned systems offer better resolution
for bathymetry, and with their small profiles and low cost, are ideal for reconnaissance. Significant cost savings are immediately available with current technology by
expanding UUV programs.
There are many missions where UUVs could be used, but they are not used due to
67
lack of vehicular experience or interest. Disruptive innovation is an organic process,
and allowing independent development and creativity is an important part of that
process. War speeds the process of disruptive innovation in a military setting because
process rigidity is secondary to victory and success. The flexibility fosters creativity
and allows those who are working on missions every day to find better solutions to
problems. Creating a similar atmosphere of flexibility and creativity is critical during
peacetime to ensure technological dominance.
4.2
Ships are expensive
As is clearly demonstrated in Appendix C, the most expensive part of nearly any
mission is ship use, both for manned system and UUV CONOPs. Ships are large,
integrated, and expensive equipment. As such, they are highly valuable assets, and
should be used in high-value missions. If there are cheaper alternatives that do the
job nearly as well, the cost savings justify those alternatives. Because they require
much less ship interaction, UUVs offer significant cost savings and are quintessential
force multipliers.
4.3
Aluminum power sources are an important step
forward
Aluminum-powered UUVs become attractive for several reasons. Because of the high
costs of using ships in completing missions, any measure that will decrease the use of
ships during UUV missions represents a significant improvement in costs. Using an
aluminum power source decreases ship interaction with UUVs by nearly an order of
magnitude, and thus the costs of operating the UUVs decreases drastically. Though
aluminum power sources are themselves expensive, estimated to represent a significant
portion of the UUV's capital costs, those higher fixed costs are minuscule compared
to the money saved using the UUV as a force multiplier for a ship.
High energy-density power sources are a technology development priority for UUV
68
research [9]. Aluminum power sources solve that difficult problem, and as such also
offer new capabilities to UUVs, accelerating their ability to disrupt naval operations.
Aluminum power would allow UUVs to stay on station for extended periods (up to 28
days in the case of the REMUS 600), making them useful for hold-at-risk missions, extended reconnaissance, and long-range inspection and bathymetry missions. During
these periods, the UUVs would need no ship interaction. Without aluminum power,
for example, hold-at-risk missions are impractical, but the addition of an aluminum
power source and the accompanying independence from human and ship interaction
makes the mission possible and highly valuable. Aluminum power is a significant step
forward in using UUVs as force multipliers and using them as a disruption to current
naval operations. Other new, disruptive, and currently unimagined mission applications will become possible through aluminum power sources and their applications.
4.4
UUVs are not one-size-fits-all
There are a variety of sizes and types of UUVs available for completing missions, and
that variety is an important strength of UUV systems. Due to their low cost and
modular designs (especially using currently and commonly available technologies),
UUVs can be used immediately to solve many problems and save money. A single
UUV cannot, and should not, be able to complete bathymetry, mine-hunting, reconnaissance, array deployment, and oceanography. Developing such a UUV would be
cost prohibitive and would encourage overshooting using UUVs themselves. Why use
a large, multimillion dollar UUV to do a job that a glider does just as well for a fraction of the cost? Unmanned underwater vehicles offer flexibility, and that flexibility
is a key to their disruptive and revolutionary power.
The variety of UUVs available, and their different strengths in completing missions, encourages their use now, rather than waiting for better, all-in-one technologies
to arrive. The experience gained and the experimentation completed will be essential
to rapidly developing UUV technologies. Focusing on jobs that need to be done, and
designing vehicles to accomplish those jobs, is key to implementing UUVs effectively.
69
A variety of types and uses will encourage their widespread adoption.
4.5
Nonconsumption and overshooting offer many
immediate UUV applications
The quantity and variety of sample missions I analyzed demonstrates the number
of missions that are currently being completed with manned systems that are too
capable, or are not being completed at all due to the difficulty of using manned
systems. Manned systems, especially ships, are expensive and suited to high-value,
difficult missions. Unmanned systems offer cost-effective alternatives that are better
suited to the type and size of the problem. Using a glider to gather oceanographic
data is far less expensive and additionally a better data source than a large, expensive
ship that could potentially be used to monitor diesel-electric submarine mobilizations
using sophisticated technologies [71]. Hold-at-risk missions cannot be pursued because
of the high cost and limited availability of attack submarines.
Overshooting and
nonconsumption offer many ways to use UUVs to improve naval operations without
threatening the strategic significance of large, multi-mission ships.
There exists a plethora of opportunities to use UUV technologies immediately.
Taking advantage of these opportunities with available technology will encourage creative use and innovation in not only technology, but also use-cases. The experience
gained will be important in maintaining a first-mover advantage over other groups
developing UUVs. Overshooting and nonconsumption ensure that UUV applications
will entail significant cost savings, improve strategic ability, and disruption will accelerate.
70
4.6
Low costs and disruptive nature of UUVs will
make them attractive to other navies
My analysis shows that UUVs can be used to augment or replace ships for a variety
of important mission types. While the U.S. Navy has the luxury of having various
capable vessels, many navies do not, and are searching for ways to expand their
capabilities using inexpensive means.
Unmanned vehicles offer the solution. Their
low costs, modular system and vehicle architectures, and low operating overheads
make them an attractive naval solution to navies and other groups around the world.
Because they have nowhere else to turn, they will begin to use UUVs extensively,
finding disruptive solutions to complex problems and threatening the U.S. Navy's
dominance.
4.7
Conclusions
Unmanned underwater vehicles promise to revolutionize naval warfare through the
mechanisms of disruptive innovation. Skillful innovation management and UUV adoption will be critical to maintaining naval superiority in the future. Unmanned vehicles
must see widespread adoption through organic, creative growth to realize significant
cost savings and strategic value.
71
72
Appendix A
Technology
A.1
Unmanned Underwater Vehicle Technology
Unmanned underwater vehicles come in a variety of shapes, sizes, and human involvement, making each type attractive for different missions. The Navy is evaluating UUV
technology for intelligent research investment and development.
A.1.1
Technology State-of-the-Art and Research Focus
The Navy has identified areas of technological need for UUVs to provide the operational abilities desired for a variety of high-value missions [9]. These technology foci
include:
* autonomy,
" energy,
" sensors and sensor processing,
* communications and networking, and
* engagement and intervention.
73
The Navy plans to invest in research to improve these technologies and make
them available on the battlefield. In addition, the Navy has identified the following
engineering implementation challenges as unresolved [9], but attainable:
* energy source selection,
" launch and recovery,
" shipboard certification,
" simulation and virtualization, and
" ForceNet interoperability.
The Navy must be able to reach its technology goals in order to successfully
execute the missions it has designed, as well as to integrate them into its current war
fighting systems.
A.2
Strategic Use of UUVs
The face of naval warfare has changed drastically since the end of the Cold War. As
a key participant in every modern conflict, the US Navy has accordingly adjusted its
strategy to match the demands to the solutions of the 21st century. The result is
SeaPower 21, which outlines the goals and means for the Navy as it confronts new
enemies in its mission to protect America [72]. SeaPower 21 enumerates four pillars
of naval power:
1. Sea Strike: Projecting Precise and Persistent Offensive Power
2. Sea Shield: Projecting Global Defensive Assurance
3. Sea Basing: Projecting Joint Operational Independence
4. ForceNet: Networking Sea Strike, Sea Shield, and Sea Basing
74
A.2.1
US Navy 2004 UUV Master Plan
In developing its underwater robotic abilities, the Navy has developed a series of
unmanned systems master plans. UUVs are envisioned as a means to improve the
Navy's current mission abilities, as well as a way to complete missions that are currently impossible or very difficult to complete using current technology. The Navy
Unmanned Undersea Vehicle Master Plan 2004 identifies nine mission types for UUVs
and gives them priority in terms of strategic significance [9]. In general, UUVs are
expected to complete missions in otherwise inaccessible areas, reduce operating costs,
operate as a force multiplier for existing naval vessels, and allow those vessels to focus
on higher priority missions. These missions are listed in order below, along with brief
explanations.
1. Intelligence, Surveillance, and Reconnaissance (ISR)
The goal of ISR missions is to improve the tactical and strategic intelligence available to warriors at every stage of conflict. As such, it encompasses a wide range of
information-gathering activities. Examples include oceanography, port and harbor
monitoring, object detection and localization, and persistent and tactical collection
of signal, electronic, or imaging intelligence.
2. Mine Countermeasures (MCM)
Mines represent a class of unusually inexpensive and easy-to-use weapons that otherwise handicapped warfighting parties can use to frustrate naval operations at any
depth. Safe paths through minefields must be created before any operation proceeds.
It is envisioned that UUVs will be used for mine hunting, specifically detection, classification, identification, and neutralization.
Several UUVs are currently used for
MCM operations by the U.S. and other navies, and more advanced UUVs are under
development.
75
3. Anti-Submarine Warfare (ASW)
Three mission types constitute ASW roles. In a hold-at-risk scenario, a UUV will
patrol a barrier zone close to an enemy port or other choke-point through which
a submarine must pass. When the UUV detects a submarine mobilization, it will
alert its operator and then begin to track the enemy submarine until further action
can be taken. The other two mission types, maritime shield and protected passage,
use UUVs to keep carrier and expeditionary strike groups free of enemy submarine
activity.
4. Inspection and Identification (I&I)
Harbor patrol and ship inspection have become important duties since September 11.
Inspecting piers and ships using divers is expensive and time consuming. UUV systems (both autonomous and human operated) are beginning to be used to inspect ship
hulls for explosives, drugs, corrosion, and fouling. They will enable more inspections
to be performed at lower cost.
5. Oceanography
During wartime, accurate and precise oceanographic data is key for any number of
naval operations. Maps of the ocean floor, salinity, temperature profiles, and ocean
currents are examples of the data that is needed. Oceanographic UUVs have been
used for years to complement existing manned and surface systems, and they are
particularly useful in gathering data in hard-to-reach locations.
6. Communications and Navigation Network Nodes (CN3)
Undersea communications is a largely unsolved, non-trivial problem. Electromagnetic
communication is limited, and acoustic methods are best for underwater communications. Underwater vehicles could provide nodes in an underwater communications
network, and provide a link to the surface for submerged submarines and other instrumentation. Unmanned underwater vehicles could also assist in special operations
76
force (SOF) operations and other littoral combat situations.
7. Payload Delivery
Large UUVs could act as underwater trucks, depositing a wide range of payloads into
sensitive locations where traditional transportation is impossible.
Payloads could
include underwater sensor arrays, supply and weapons caches for SOF operations,
smaller UUVs, weapons, or communications transponders.
8. Information Operations (10)
The goal of 10 missions is to deceive, deter, and disrupt the enemy. Unmanned
underwater vehicles could complete a variety of missions. For example, UUVs have
acted as ASW decoys for some time, with the aim of causing the enemy to dilute
their ASW resources and change tactics. Vehicles could also jam nodes and inject
false information into enemy networks in denied areas.
9. Time Critical Strike (TCS)
The ultimate application of UUVs is like unto their aerial drone brethren, i.e. as
integral members of the kill chain with sensor to shooter closure measured in seconds.
Doing so would help keep sailors out of harms way and draw attention away from high
value manned vessels. While autonomy is rapidly improving, man-in-loop operations
will still be required for weapons deployment.
A.3
Evaluated Mission Selection
In its Master Plan, the Navy ranked the missions dependent upon strategic needs
and operational requirements and current technological capabilities.
In 2009, the
RAND Corporation undertook a study of the strategic and technological implications
involved in the 2004 Master Plan. RAND evaluated the missions based on CONOPs
envisioned by the authors of the Navy itself, as well as technologies currently available
in UUV systems [47]. RAND concluded that not all of the CONOPs envisioned by
77
the Navy were technologically possible or strategically advisable [47].
Among the
problems with mission expectations identified by RAND were those associated with
technologies currently unavailable (as noted previously in Section A.1.1):
* a general lack of autonomy for many mission types:
- SIGINT, ELINT, MASINT, and IMINT;
- IO missions to jam communication and inject false information;
* radical increase in power and energy needs for high transit speeds;
" lack of reliability for SOF missions;
" mast height requirements that compromise secrecy near the surface;
" no need for many CN3 missions, including network node and on-demand lane
marker;
" violation of international treaties in weaponizing UUVs with cruise missiles.
Their analysis recommended a new prioritization of UUV missions in relation
to technology readiness and strategic needs based on more specific and accurate
CONOPs [47]. The missions outlined in Table 2.1 are those which I analyze based on
cost and financial upside, as well as disruptive potential.
78
Appendix B
Naval System Cost Calculations
Cost summaries are presented in 2013 U.S. dollars. Where appropriate, I accounted
for inflation to 2013 dollars using the CPI from the U.S. Bureau of Labor Statistics
[73].
I give original costs designated by their respective fiscal year in parentheses.
Totals may not add due to rounding.
B.1
B.1.1
Ships
Ship Life-cycle Costs as Calculated by the Congressional Budget Office
I based ship lifecycle costs on calculations outlined in a letter to Senator Jeff Sessions
from the Congressional Budget Office (CBO) for the full life-cycle costs of five ships
[74]. The CBO calculated life-cycle costs based on DoD Selected Acquisition Reports
(SARs), data from the Navy's Visibility and Management of Operating and Support
Costs (VAMOSC) system, and from other DoD and CBO sources and analyses. The
costs they considered were procurement, research and development (R&D), personnel,
fuel, other operations and support (O&S), and disposal.
support, personnel relocations, etc. were not included.
The cost of Navy base
The letter noted a report
suggesting that the DoD underestimates the fully burdened cost of fuel by 45%. New
guidance to DoD service acquisition executives suggests these recommendations were
79
being adopted in August 2012 [75]. Accordingly, I adjusted the fuel costs presented
in the letter to reflect the 45% misalignment. The CBO calculated annual costs by
dividing the total life-cycle cost by the expected service life.
In addition to the aforementioned cost data, the CBO provided the displacement,
crew (officers and enlisted men), and the number of vessels built of each class. The
CBO calculated life-cycle costs for five ship programs:
1. MCM-1 Avenger class mine countermeasures ship
2. FFG-7 Oliver Hazard Perry class guided missile frigates
3. DDG-51 Flight IIA Arleigh Burke class guided missile destroyers
4. CG-47 Ticonderoga class guided missile cruisers
5. LCS-1 Freedom class littoral combat ships
A summary of the data and costs in millions of 2013 dollars is presented in Table B.1.
B.1.2
Other Ship Life-cycle Costs
The CBO did not analyze the life-cycle costs of all ships needed for my analysis.
Based on their methodology and calculations, I calculated the life-cycle costs of six
additional classes:
1. SSN-774 Virginia class nuclear-powered fast attack submarine
2. LHA(R) America class amphibious assault ship
3. T-AGOS Impeccable class ocean surveillance ship
4. Swedish Gotland class diesel-electric submarine
5. Shallow Water Combat Submersible (SWCS)
6. Rigid Hull Inflatable Boat (11m length) (RHIB)
80
Table B.1: CBO-calculated Life-cycle Ship Costs
Class
MCM-1
FFG-7
DDG-51
CG-47
LCS-1
8,600
24
254
34
35
9,100
24
340
22
35
2,800
11
43
1
25
Ship Characteristics
Displacement (tonnes)
Officers
Enlisted
Number of ships
Expected service life
1,300
8
76
14
30
3,700
11
170
30
30
Ship Costs
R&D
Procurement
Personnel
Fuel
Other O&S
Disposal
3
293
260
12
110
0
2
708
546
194
215
0
77
1588
960
514
276
1
9
2155
1237
566
523
1
21
728
172
123
95
0
Total
697
1,665
3,415
4,490
1,139
Annual
23
56
98
128
46
I calculated lifecycle costs to match the analysis of the CBO as best as possible. For
each vessel type, I found or approximated the displacement, crew, expected service
life, total R&D budget, number of boats, and procurement cost.
To calculate personnel costs, I calculated the average annual crew cost for the CBO
vessels, then performed a multiple linear regression to determine the annual cost per
officer ($246,000 per year) and enlisted man ($87,000 per year). I then multiplied
the new vessel's crew compliment by the respective costs per year and the expected
service life.
I calculated fuel costs by taking a linear regression of annual fuel costs vs. displacement of the CBO vessels (0.0016 per year), taking into account speed where
appropriate in subsequent calculations. I multiplied the result by the displacement
and expected service life of the new vessel.
I calculated other O&S costs for new vessels by taking a linear regression of the
annual O&S costs vs. procurement costs of the CBO vessels (0.0064 per year). I
81
Table B.2: CBO-calculated Life-cycle Ship Costs
Class
SSN-774
LHA(R)
T-AGOS
Gotland
SWCS
RHIB
5,500
10
35
1
30
1,500
19
11
3
30
30
0
0
50
25
8
3
0
200
20
Ship Characteristics
Displacement (tonnes)
Officers
Enlisted
Number of ships
Expected service life
7,900
15
117
10
33
45,700
65
994
3
35
Ship Costs
R&D
Procurement
Personnel
Fuel
Other O&S
Disposal
143
2,700
548
0
618
1
127
3,263
4,292
2,758
792
1
60
748
198
93
156
1
17
392
203
77
82
1
10
60
0
0
10
1
0
1
18
3
0
0
Total
Annual
4,010
122
11,232
321
1,256
42
964
32
82
3
22
1
multiplied the result by the new vessel's procurement cost and expected service life.
For disposal, I estimated $1 million for each large vessel, based on the CBO's own
estimates [74].
I present the results of my new ship analyses in Table B.2. The specifics of each
calculation follow. Costs are in millions of 2013 dollars.
SSN-774 Virginia Class Nuclear-powered Fast Attack Submarine
The USS Virginia represents the latest generation of nuclear attack submarines, designed to replace the aging Los Angeles class attack submarines.
Designed for a
variety of missions, she displaces 7,900 tonnes with a crew of 14 officers and 127 enlisted men [76]. Currently, the Navy has ordered 10 vessels at a cost of $2.7 billion
each [77]. They will not need to be refueled during their expected 33 years at sea, and
the initial fueling is included in procurement costs [78]. I determined total research
and development costs from the total expected program cost ($85.3 billion, $67.0
82
billion FY2003) divided over 30 total expected vessels, minus the procurement cost
[79]. I calculated personnel, other O&S, and disposal costs as I described previously.
LHA(R) America Class Amphibious Assault Ship
The America class is the latest generation of flattop amphibious assault ships, carrying
marines, aircraft, and equipment for sea-based land operations. The USS America
displaces 45,700 tonnes and is crewed by 65 officers and 994 enlisted sailors [80]. Three
ships have been procured at a cost of $3.3 billion each and research costs totaling $380
million [81]. I estimated expected service life based on other ship lives, and personnel,
fuel, other O&S, and disposal costs as I explained previously.
T-AGOS-23 Impeccable Class Ocean Surveillance Ship
Ocean surveillance ships complete a wide variety of missions, including oceanography,
bathymetry, anti-submarine warfare, and salvage operations. The catamaran-hulled
USNS Impeccable displaces 5,500 tonnes [82]. She has a crew of 20 mariners, 5 technicians, and up to 20 other Navy personnel, leading me to estimate a crew composition
of 10 officers and 35 enlisted men [82]. My estimate of the procurement cost is proportional by displacement to the cost ($471.32 million, $249.6 million FY1989) [83] of
the smaller T-AGOS-19 USNS Victorious (3,400 tonnes) [82]. My research cost and
service life estimates are based on the figures for a frigate, a ship of slightly smaller
size and comparable complexity. Personnel, other O&S, and disposal costs were calculated as explained previously. Fuel costs were estimated as explained previously,
but then multiplied by 0.33 due to her typically slow operating speed (10 knots),
especially when towing (3 knots) [82], in accordance with calculations made by the
CBO in determining MCM and LCS fuel costs [74].
Swedish Gotland Class Diesel-electric Submarine
The U.S. Navy exclusively operates nuclear-powered submarines, a vessel designed
for deep submergence for long periods at high speeds. Diesel-electric submarines are
a less-expensive option popular with many nation-states, offering improved littoral
83
operability and posing a significant threat to the U.S. fleet. The U.S. leased a Gotland
class diesel-electric submarine from Sweden for two years for use in a variety of exercises [84]. HMS Gotland displaces 1660 tonnes [85] and is crewed by 19 officers and 11
enlisted sailors [86]. There are three ships in the class [84], costing $392 million ($365
million FY2010) each [87]. I estimated service life according to other similar vessels,
and R&D costs from those of the frigate class (the frigate is larger, but the Swedes
spent significant research effort in developing the advanced Stirling-based propulsion
system). I calculated personnel, fuel, other O&S, and disposal costs as previously
explained. The total sum was multiplied by 1.25 to represent a lease rate (I present
the total per year lease cost, i.e. the cost to the United States).
Shallow Water Combat Submersible
The Mark 8 Mod 1 Swimmer Delivery Vehicle offers Navy SEALs a clandestine mode
of transport from submerged submarine to operational area. The SWCS is an updated
version of the SDV under development, providing an estimate for current and future
SEAL vehicle operations. Assessing the larger and cancelled Advanced SEAL Delivery
System (ASDS) (displacement of 60 tonnes [88], original cost $102 million, $80 million
FY2003 [89]), I estimated the SWCS displacement to be 30 tonnes and cost to be
$60 million. The vehicle runs on battery charged by its host submarine (therefore no
calculated fuel costs) and is used by six SEALs, all of whom are part of the fighting
team (hence no crew costs). The Navy plans to build 50 submersibles, and the current
research budget is $509 million [90]. I estimated the service life from the current SDV,
which has been in operation since the 1980s (with an upgrade) [91]. I calculated other
O&S and disposal costs as explained previously.
Rigid Hull Inflatable Boat
Rigid Hull Inflatable Boats are the vessel of choice for many operations based on
shore or off larger vessels. Their speed makes them desirable for missions including
diving, smuggling inspections, mine countermeasures, and SEAL operations [92]. The
current 11m long RHIB in use by the U.S. Navy displaces 7.8 tonnes and is manned
84
by three officers and transports a SEAL team [93].
I estimated total R&D costs
to be $7.3 million ($7.0 million FY2011), as this is the development budget for the
new combat craft, medium (CCM), which is slated to replace the current RHIB [94]
as it reaches the end of its 20-year service life [92].
Including support equipment,
procurement costs are $1.3 million each ($1.1 million FY2005) [95], and noting their
wide-spread use in special forces operations, I estimated a 200 unit production run
[92]. I calculated personnel and other O&S costs as explained previously. I calculated
fuel as explained, and then added a multiplier of 10 due to the inefficiency of small
engines and the high sustained speeds of the RHIB [93]. Because of their small size,
I estimated disposal costs to be $10,000 [93].
Hourly Ship Costs
B.1.3
To determine the cost of a ship during a mission, I calculated the daily and then the
hourly cost of each ship. The Navy deploys its ships for approximately 6 months every
two years [96]. Including other training and non-deployment operations, I estimated
that a Navy ship is in use for approximately 1/3 of a year, or 122 days. To find
the daily operating cost, I divided the annual life-cycle cost by 122 days. To find
the hourly rate, I divided the daily cost by 24 hours, since during deployment ships
operate 24 hours per day. I present the hourly cost of the ships in 2013 dollars in
Table B.3.
B.2
UUVs
I calculated the hourly costs of class-representative UUVs using their capital costs,
research costs, maintenance costs, and energy use. I also calculated ship utilization
rates to determine the cost of ship time in using UUVs. I completed these calculations
for battery-powered and aluminum-powered UUVs. Unmanned underwater vehicle
characteristics and costs are presented in thousands of 2013 dollars in Table B.4.
Hourly costs in 2013 dollars and utilization rates for each UUV class are presented
in Table B.5.
85
Table B.3: Ship Costs per Hour
Vessel Class
B.2.1
Cost per Hour
MCM-1
FFG-7
DDG-51
7,800
19,000
33,300
CG-47
LCS-1
SSN-774
43,800
15,600
41,500
LHA(R)
T-AGOS
Gotland
109,600
14,300
11,000
SWCS
1,100
RHIB
400
Energy Costs
Batteries
Batteries are charged from the ship's power grid, with electricity generated from the
ship's boilers, which operate at approximately 70% efficiency and run on gasoline [97].
I found the cost per liter of gasoline using oil costs of $94 per barrel [98], and the
Navy's gasoline multiplier of 3.2 [74]. I then calculated the number of liters needed
per UUV recharge based on the energy density of gasoline (30 MJ/L [99]), the boiler's
efficiency, and the UUV battery capacity. I calculated the cost of fuel per recharge
and then the energy cost per day based on the number of recharges per day for the
UUV (mission duration divided by 24 hours). I found hourly fuel costs by dividing the
daily fuel cost by 24 hours, and the annual fuel cost by the expected annual service
time of 120 days [96].
Aluminum
The aluminum-based power system is refueled using a prepackaged fuel source placed
in the body of the UUV. Using industrial aluminum bb's weighing 0.3 g each and
costing $29 per 2500 [100], and the energy density of aluminum (83.8 MJ/L) and
86
00
Battery
Aluminum
Annual
Total
Energy
Procurement
R&D
Maintenance
Battery
Aluminum
Battery
Aluminum
Battery
Aluminum
Mission duration (hr)
Number of units
Expected service life (yrs)
Diameter (m)
Battery capacity (kWh)
Class
Vehicle
1,218
800
621
1
1,047
2,640
3,686
132
184
0.19
1
22
218
100
20
Light-weight
REMUS 600
2,800
800
1,428
4
1,168
5,032
6,196
252
310
UUV Costs
0.32
11.3
70
685
100
20
UUV Characteristics
Man-portable
REMUS 100
2,543
3,125
1,297
13
1,562
6,978
8,526
349
426
0.53
13.5
25
247
48
20
Heavy-weight
Bluefin 21
8,229
11,657
3,456
43
2,801
23,354
26,143
1,169
1,307
1.27
48.7
28
279
35
20
Large
LDUUV
Table B.4: Unmanned Underwater Vehicle Characteristics and Costs
1,500
4,000
765
0
N/A
6,265
N/A
313
N/A
N/A
1.7
4320
N/A
5
20
32
100
17
74
N/A
227
N/A
11
N/A
0.20
4.9
7920
N/A
50
20
Glider
Z-Ray Spray
Table B.5: UUV Hourly Costs and Ship Utilization Rates
Cost per hour
UUV
REMUS 100
REMUS 600
Bluefin 21
LDUUV
Z-Ray
Spray
Utilization Tship
Battery Aluminum
46
87
23%
7%
2%
1%
121
404
48
1
20%
18%
0.1%
0.1%
2%
1%
N/A
N/A
density of aluminum (2.7 kg/L) I found the cost of the volume of aluminum needed
to power the UUV to 10 times its battery-powered mission duration (one recharge).
I assumed a final conversion efficiency of 25% (a fuel cell-based solution with 50%
efficiency, using hydrogen, which accounts for 50% of the output of the aluminumwater reaction [101]).
I also assumed an additional capital cost of $1.0 million for
the aluminum power system. I found the daily recharge cost from the number of
recharges per day (new mission endurance divided by 24 hours), and the hourly cost
by dividing daily costs by 24 hours. The annual cost I found by multiplying the daily
fuel cost by 120 days, the expected annual service time [96].
B.2.2
Ship Utilization Rate
For simplicity, I calculated the UUV rate of ship use
Tship
as
trecharge
(B.1)
tendurance
where
trecharge is
the average recharging time of five hours [102] and
tendurance
is UUV
mission endurance. When calculating mission costs, if the expected mission length
was less than the UUV's capabilities, I used the mission length rather than the full
UUV endurance. I estimated recharge time to be five hours for all classes and for
both power systems (battery and aluminum).
When more than one UUV is used in a mission, I multiplied the usage rate by m,
88
where
m= I
k=1
(B.2)
n
and n is the number of UUVs in use by the ship, up to 100% ship utilization.
B.2.3
Man-portable Class
The REMUS 100, at 7.5 inches in diameter, is perhaps the most common UUV in use
with the U.S. Navy, with 22 hours of endurance from a 1 kWh battery [12]. Expected
annual usage is 33% [96]. Costing $1.2 million (FY2007 $1.1 million) each [103] and
expected to serve 20 years, maintenance was estimated to be 51% of procurement
costs [104], and research was estimated to be $80 million for over 100 vehicles.
B.2.4
Light-weight Class
The 12-inch diameter REMUS 600 is a general purpose AUV with a 70-hour mission
endurance [13] on a 11.3 kWh battery [105].
The REMUS 600 has an expected
service life of 20 years [104], with estimated research costs of $80.0 million for over
100 vehicles and procurement costs of $2.8 million each [26]. The REMUS 600 has
maintenance costs of 51% of capital costs ($1.4 million) and a 33% usage rate [96].
B.2.5
Heavy-weight Class
The Bluefin 21 is a 21-inch diameter AUV. The Knifefish, a variant of the Bluefin
21, is a joint project between General Dynamics and Bluefin that will enter service in
2017 at a capital cost of $2.5 million [106] with a lifespan of 20 years [104]. Research
funding for an expected 48 units has been $150 million [107], and maintenance costs
are estimated to be 51% of capital costs, at $1.3 million [104]. The Bluefin 21 has
13.5 kWh batteries [3] to power it on 25-hour missions [3] with an annual usage rate
of 33% [96].
89
B.2.6
Large Class
Boeing's Echo Ranger is a large, 50-inch diameter UUV, representative of the new
large diameter UUV (LDUUV) requirement for a long-endurance, large payload UUV.
The Navy projects that when deployed, the LDUUV budget will total $1.2 billion with
35 units [104]. Procurement costs will be 24%, at $8.2 million each, and a total of
$408 million is going to research and development [104]. Maintenance will be 42%
of procurement costs at $3.5 million and the expected service life will be 20 years
[104].
The Echo Ranger currently has a 28-hour mission endurance [4] from 26.0
kWh batteries. I estimated the battery capacity as the sum of propulsive power,
hotel load, and sensor power times the vehicle endurance. I calculated propulsive
power Pp as
PP=
2
C
(B.3)
where p is the density of water (1027 kg/M 3 ), A is the reference area (in this case,
the cross-sectional area of the vehicle, as given by A = rd 2 /4),
p is the propulsive
efficiency (estimated to be 0.87), v is the vehicle's velocity (the LDUUV travels at
an average of 3 kts [4]) and
Cd
is the drag coefficient (estimated to be 0.13) [47]. I
calculated hotel load from the estimated REMUS 600 hotel load of 30W [101], scaled
by displacement (0.33 tonnes REMUS 600 [13], 5.3 tonnes Echo Ranger [4]). Sensor
power is estimated to be 150 W [108] and operative 66% of the mission time. The
LDUUV expected usage rate is 33% [96].
B.2.7
Z-Ray Glider
The Z-Ray glider, also known as the Liberdade glider, is an advanced, flying-wingshaped ocean glider with a significantly greater lift-to-drag ratio than other glider
designs (allowing also for greater speeds), with research funding estimated to be a
total of $20 million over 5 units [7]. Estimated to cost $1.5 million, the Z-Ray can
stay at sea for six months with an annual utilization of 75% [16] and an expected
service life of 20 years [104].
Maintenance costs are 51% of procurement costs at
$765,000 [104], and battery capacity is 1.7 kWh [47, 109].
90
Table B.6: Other Mission Resource Costs per Hour
Resource
Cost per Hour
Inspection Team
In-water Survey Team
AUV or ROV Operator
Navy SEAL
Dolphin
B.2.8
1,657
5,715
72
586
314
Spray Glider
The Spray glider (7.9-inch diameter) is manufactured by Bluefin Robotics and costs
$32,000 (FY2002 $25,000) [110], with over 50 units estimated to be in use. Using a 4.9
kWh battery [6], the Spray can operate for 330 days [110], with an expected service
life of 20 years [104] and annual utilization of 95% [96, 110].
Each recharge costs
$3,700 (FY2002 $2,850) [110], maintenance is 51% of procurement costs at $17,000
[104], and research costs were estimated to be $5 million.
B.3
Other Mission Resource Costs
Hourly costs for diving teams, Navy SEAL operators, and Navy dolphins are presented
in 2013 dollars in Table B.6
B.3.1
Diving Teams
I calculated diver hourly costs and equipment costs using Oceaneering's (an oil industry underwater service company) standard rate book [5].
For drug and limpet mine inspection divers, I used the onshore NDT inspection air
diver daily cost of $797 (FY2012 $784) and divided by eight hours to find the hourly
cost. In addition to a team of five divers, inspections require a dive leader, whose
hourly cost I estimated as that of a diving supervisor at $814 (FY2012 $800) divided
by eight hours. For equipment costs, I used the shallow air equipment package cost of
$651 (FY2012 $640) and divided by eight hours. To calculate the total cost per hour
91
per diver, I added the diver hourly costs to the equipment hourly costs (for each of
the six divers). Finally, I estimated a surface-based inspection chief hourly cost from
the $1,556 (FY2012 $1,530) daily cost of a project manager, divided by eight hours.
The total hourly team cost (five divers, a diving leader, and an inspection chief, and
a RHIB [111]) is $1,657.
For in-water survey ship inspection divers, the Navy employs a team of 15 divers,
two diving supervisors, two inspection supervisors, one operations officer, and one
supply officer [112]. To find the diver costs, I used the offshore NDT inspection air
diver daily cost of $1,195 (FY2012 $1,175) and divided by eight hours. I estimated
the two diving supervisors hourly costs from that of offshore air diving supervisors
at $1,246 (FY2012 $1,225) and divided by eight hours.
I found the hourly costs
for the inspection supervisors based on the offshore project managers daily cost of
$2,342 (FY2012 $2,303) and divided by eight hours. I found the hourly costs of the
operating officer from the daily cost of an offshore superintendent at $2,114 (FY2012
$2,078) and divided by eight hours. To find the supply officer's hourly cost, I took
the offshore non-diving supervisor daily cost of $1,451 (FY2012 $1,426) and divided
by eight hours. For equipment costs, I used the shallow air equipment package cost of
$651 (FY2012 $640) and divided by eight hours for all diving personnel. To calculate
the total cost per hour per diver, I added the diver hourly costs to the equipment
hourly costs. The total team cost per hour (21 personnel and two RHIB) is $5,715.
B.3.2
AUV and ROV Operators
Using Oceaneering's rate books, I estimated the cost of an AUV or ROV operator to
be $880 per day (FY2012 $865), or $73 per hour over a 12-hour day [5]. I used one
operator per AUV or ROV in my calculations.
B.3.3
Navy SEAL Operators
For Navy SEAL operators, I used the offshore saturation diver daily cost of $3,727
(FY2012 $3,664) (to account for their diver training and opportunity cost) and divided
92
by 12 hours. To account for equipment costs (including diving equipment, weaponry,
etc.), I used the saturation equipment daily cost of $3,054 (FY2012 $3,002) and
divided by 12 hours. I also included the $544,000 (FY2009 $500,000) cost of training
a SEAL [113] spread over their six-year service commitment [114]. To calculate the
total cost per hour per diver, I added the diver hourly costs to the equipment hourly
costs. To arrive at Navy SEAL costs per hour of $586, I summed diver hourly costs,
equipment hourly costs, and training hourly cost.
B.3.4
Navy Marine Mammal Program
Since its inception in the 1950s, the Navy's $29.1 million (FY2011 $28 million) per
year Marine Mammal Program has trained dolphins and sea lions for a variety of
missions, including harbor protection and swimmer interception, object retrieval from
the seafloor, and mine countermeasures missions [115]. The Navy currently uses 75
dolphins and 35 sea lions in its program [116].
I calculated the division of costs
to each animal type based on weight. Dolphins average 500 kg [117] and sea lions
average 140 kg [118], resulting in an annual cost of $344,000 per year per dolphin.
I calculated the daily cost per dolphin for use in mine countermeasure missions by
using a 25% utilization factor [96] over a 365-day year and calculated hourly costs of
$314 by dividing by 12 hours.
93
94
Appendix C
Mission Cost Calculations
C.1
Intelligence, Surveillance, and Reconnaissance
(ISR)
C.1.1
CBNRE Detection and Localization
Manned System Operational Costs
Standard CBNRE missions employ T-AGOS ocean surveillance ships to measure water quality, track plumes, and assess the extent of contamination, costing $14,000 per
hour. Over a representative deployment of 14 days, a T-AGOS ship will gather 10
water column profiles per hour using a towed underwater mass spectrometer [481, at
an estimated ship utilization of 80% (as the ship can tow other instruments simultaneously, but other missions are difficult to accomplish while towing).
The total
mission cost is $3,842,000. A total of 3,360 profiles are made over the course of the
mission, for a cost of $1,100 per profile.
UUV Operational Costs
REMUS 600 - Batteries
The REMUS 600 (costing $80 per hour, with an AUV
operator costing $73 per hour) could be used as a platform (launched from a T-AGOS
ship) for an underwater mass spectrometer taking 10 water profiles per hour [48] over
95
the same 14-day period. With three vehicles deployed, the T-AGOS ship (costing
$14,300 per hour) utilization would be 13%. The ship is able to use the rest of its
availability to complete other missions. A total of 9,960 profiles would be collected,
for a cost of $79 per profile, which is 7% of the ship-based cost per profile. The total
mission cost would be $791,000, which is 21% of ship-based operational costs. Of the
total, the ship accounts for 80% of the costs, while the REMUS vehicles account for
20% of the cost.
REMUS 600 - Aluminum
Using REMUS 600 vehicles in the same circumstances
outlined above, but with aluminum power sources (costing $107 per hour), I calculated
a ship utilization rate of 2%. The total cost of the mission would then be $287,000,
which is 7% of ship-based mission costs, and 36% of mission costs using batterypowered REMUS 600 vehicles. Ship costs account for 37% of the mission, and the
REMUS vehicles account for 63%. The cost per profile falls to $28, which is 2% of
ship-based costs per profile.
C.1.2
Water Column Profiling
Manned System Operational Costs
Profiling the water column for battle-space preparation and intelligence falls to TAGOS ships using CTD (conductivity, temperature, depth) casts and helicopterdeployed XBTs (expendable bathythermographs).
During Exercise SHAREM 150,
a 2005 U.S. Navy exercise, 19 CTD and 367 XBT traces were taken over 22 days
[47, 53]. I estimated T-AGOS ($14,000 per hour) utilization to be 25% over that time
period, and aircraft carrier ($2,893,000 per hour) utilization to be 5% (for helicopter
use). The total mission cost was $4,780,000, or $12,000 per profile.
UUV Operational Costs
During the aforementioned Exercise SHAREM 150, ocean gliders were used to supplement shipboard operations and test autonomous systems. Over the 22-day exercise
96
(the gliders were not serviced during that time), a team of four gliders (costing $1
per hour, plus $73 per hour each for AUV operators) took 4,782 profiles at varying
depths [53]. The gliders were launched from a T-AGOS ship costing $14,000 per hour
with a total utilization of 2%. In total, the mission cost $190,000, which is 2% of
ship-based costs. Of the total, 78% of costs came from ship costs, and 22% came
from glider costs. Each profile cost $40, or 0.2% of the cost per profile of ship-based
operations.
C.1.3
Near-land and Harbor Monitoring
Manned System Operational Costs
Clandestine monitoring of high-value targets is accomplished using a team of six Navy
SEAL operators (each costing $586 per hour) [91] traveling using a SWCS ($1,100 per
hour) launched from an SSN-774 ($42,000 per hour) [51]. I assumed eight hours of
travel each way [52] at a speed of 5 kts [119] over a standoff distance of 40 nm. A loiter
time at the target of four hours [51] gives a total mission time of 20 hours (stretching
the limits of human endurance).
To direct the mission and ensure the safety and
recoverability of the prosecuting SEAL team, an aircraft carrier (costing $110,000
per hour) providing air support and a backup rescue SEAL team waits offshore. I
assumed 90% utilization of the submarine and 70% utilization of the aircraft carrier,
as human lives are at stake in a high-risk mission. The total mission cost is $2,374,000,
with 96% of costs accounted for by ship use. The cost per loiter-hour at the target is
$594,000.
To achieve a loiter time at the target of 24 hours (representative of detailed intelligence on a target), six missions would be required, for a total cost of $14,244,000.
For a hypothetical long-term monitoring operation of 14 days, a mission requiring
insertion and recovery of the SEAL team, the total cost would be $6,089,000. The
$3,515 per hour six-man SEAL team would be inserted through a six-hour mission
(requiring 90% of a $110,000 per hour aircraft carrier) and would require 10% carrier
utilization during their 14-day mission for oversight and possible mission abortion
97
and recovery. The cost per loiter-hour in this instance would be $18,000, with high
risk to human life and mission failure. Such a mission would be difficult to complete
with current resources.
UUV Operational Costs
REMUS 600 - Batteries
An REMUS 600 vehicle (costing $87 per hour, plus
$73 per hour for an operator) launched from a SSN-774 (costing $42,000 per hour)
can accomplish similar intelligence-gathering missions (battle-space preparation for
insertion and landing, port conditions, etc.).
For a loiter time of four hours, the
total mission length is 31 hours, and submarine utilization is 16%. Total mission
cost is $212,000, which is 9% of the cost of completing the mission using Navy SEAL
operators, and with no risk to human life. Of the total cost, 98% goes toward ship
use, and 2% to REMUS operation. The cost per loiter-hour is $53,000, which is 9%
of the original cost per loiter-hour.
For a full intelligence gathering mission requiring 24 hours of loiter time, the
mission length would be 51 hours, submarine utilization would fall to 10%, and the
total cost would be $216,000, which is 2% of the cost of completing the same 24 hours
of loiter time using Navy SEAL teams. The cost per loiter-hour would be $9,000. Of
the total cost, ship use would account for 96% of costs, and 4% would be accounted
for by the REMUS vehicle.
REMUS 600 - Aluminum
Completing the hypothetical long-term, 14-day in-
telligence operation would require a REMUS 600 equipped with an aluminum power
source (costing $107 per hour, plus $73 per hour for an operator). Total mission length
would be 363 hours, submarine utilization would be 1%, and total mission cost would
be $266,000, which is 5% of the cost of the long-term monitoring operation using an
inserted Navy SEAL team (and 2% of the cost of a 24-hour loiter operation using
SEALs). Of the total cost, 78% is for ship use, and 22% is for REMUS operation.
No human lives would be put at risk, and mission failure would result simply in the
loss of a replaceable $2.8 million vehicle. Cost per loiter-hour would be $791, which
98
is 0.1% of the original cost per loiter-hour.
C.1.4
Array Deployment
Manned System Operational Costs
In 2003, teams of four Navy SEALs completed a series of missions deploying cameras
in Somalia for intelligence purposes [51].
The SEALs (each costing $586 per hour)
[91] traveled using an SDV (similar to a SWCS and costing $1,100 per hour) launched
from an SSN-774 ($42,000 per hour) [51]. They travelled eight hours each way [52] at
a speed of 5 kts [119] over a standoff distance of approximately 40 nm. Their average
time at the target deploying the cameras was three hours [51] giving a total mission
time of 19 hours. To direct the mission and ensure the safety and recoverability of the
prosecuting SEAL team, an aircraft carrier (costing $110,000 per hour) providing air
support and a backup rescue SEAL team awaited offshore. I assumed 90% utilization
of the submarine and 70% utilization of the aircraft carrier, as human lives are at
stake in a high-risk mission. I calculated the total mission cost to be $2,233,000, with
97% of costs accounted for by ship use. I found the cost per installation hour at the
target to be $744,000.
UUV Operational Costs
The U.S. Navy envisions using the LDUUV to deploy sensor arrays for battle-space
preparation to lighten the load on special forces operators [47]. An LDUUV (costing
$404 per hour, plus $73 per hour for an operator) would travel at 3 kts to its target
and loiter for an estimated one hour for array installation (automated arrays would
deploy rapidly).
The total mission time would be 28 hours, the current limit of
LDUUV endurance, and ship utilization would be 18%. I calculated that the total
mission cost would be $271,000, which is 12% of Navy SEAL operations, and with
no risk to human life. Ship usage is 77% of the total costs, and LDUUV operation is
23%. The cost per installation hour would be $270,000, which is 36% of that of Navy
SEAL operations.
99
C.1.5
Bathymetry
Manned System Operational Costs
Bathymetric surveys are completed using T-AGOS ships (costing $14,000 per hour)
towing Orion side scan sonar tow fish at a speed of 2 knots [56]. The tow fish takes
two hours for deployment and recovery [33]. I estimated ship usage to be 90%, and
I assumed a 20% penalty for turning between tracklines. Swath widths depend on
the resolution required: 300 m for torpedo-sized objects (high-resolution), 1,800 m
for aircraft debris fields (medium-resolution), and 3,000 m for bathymetry [56] (lowresolution). I analyzed mission costs for each of the three resolution situations, and
in each situation, the cost of the ship represented 100% of mission costs.
For the high-resolution bathymetry mission mapping a representative area of 20
km 2 [33], the floor mapping rate is 1 km 2 per hour, the total mission time is 25 hours,
and the total costs are $317,000, or $16,000 per km 2 mapped.
For the medium-resolution bathymetry mission mapping a representative area of
6000 km2 [57], the floor mapping rate is 6.5 km 2 per hour, the total mission time is
1,100 hours (46 days), and the total mission costs are $14,324,000, or $2,387 per km 2
mapped.
For the low-resolution bathymetry mission mapping a representative area of 17,000
km 2 [57], the floor mapping rate is 11 km 2 per hour, the total mission time is 1,900
hours (66 days), and the total mission costs are $24,330,000, or $1,431 per km 2
mapped.
UUV Operational Costs
For each of the resolution situations, the swath of the AUV was assumed to be half
that of the tow fish, based on a high-resolution swath width of 150 m for the MBARI
Dorado vessel [33]. REMUS 600 vehicles are launched from T-AGOS vessels (costing
$14,000 per hour), travel at 3 kts, require two hours for ascent and descent [33], and
require AUV operators costing $73 per hour. Total mission time was calculated as the
time needed to map the area, plus two hours for initial ascent and descent, plus seven
100
hours for each recharge cycle needed during the mission (five hours for recharging,
two hours for ascent and descent).
REMUS 600 - Batteries
A battery-powered REMUS 600 costs $87 per hour
with a 70-hour endurance.
For the high-resolution bathymetry mission, ship usage is 19%, line spacing is 150
m [33], and the floor mapping rate is 0.8 km 2 per hour. The total mission time is 27
hours and the total mission costs are $76,000, or $3,787 per km 2 mapped. The costs
are 24% of the cost of ship-based operations. Of the total mission costs, ship usage
accounts for 94%, and UUV operation accounts for 6%.
For the medium-resolution bathymetry mission, ship usage is 13%, line spacing is
900 m, and the floor mapping rate is 5 km 2 per hour. The total mission time is 456
2
hours (19 days) and the total mission costs are $1,070,000, or $178 per km mapped.
The costs are 7% of the cost of ship-based operations. Of the total mission costs, ship
usage accounts for 80%, and UUV operation accounts for 20%.
For the low-resolution bathymetry mission, ship usage is 13%, line spacing is 1,500
m, and the floor mapping rate is 8 km 2 per hour. The total mission time is 772 hours
(32 days) and the total mission costs are $1,813,000, or $107 per km 2 mapped. The
costs are 7% of the cost of ship-based operations. Of the total mission costs, ship
usage accounts for 80%, and UUV operation accounts for 20%.
REMUS 600 - Aluminum
An aluminum-powered REMUS 600 costs $107 per
hour with a 685-hour endurance. In the medium and low-resolution situations, ship
usage is 2%, and accounts for 37% of mission costs, while UUV operation accounts
for 63% of mission costs. Due to the short mission time demanded by the high-res
mission's representative area, the aluminum-powered REMUS was not analyzed for
that situation.
For the medium-resolution bathymetry situation, total mission time is 411 hours
2
and total mission costs are $352,000, or $59 per km mapped. Costs are 2% of ship-
based operations, and 33% of missions using battery-powered REMUS vehicles.
101
For the low-resolution bathymetry situation, total mission time is 709 hours and
total mission costs are $517,000, or $30 per km 2 mapped. Mission costs are 2% of
ship-based operations, and 29% of missions using battery-powered REMUS vehicles.
C.1.6
Mine Detection, Classification, Identification, and Neutralization
REMUS 100 vehicles were used during the 2003 invasion of Iraq to hunt mines in key
ports. In one such exercise, an AUV hunted 100 mines in 16 hours [120], completing
the work of 16 divers [55]. Assuming 12 hours per diving work day, it would take 256
hours to hunt 100 mines, yielding 2.5 man-hours per mine, versus 0.2 UUV-hours per
mine.
Manned System Operational Costs
An MCM vessel (costing $8,000 per hour, and assuming 90% utilization) serves as a
base of operations for a team of four [121] Navy SEAL divers (costing $586 per hour)
performing mine-hunting operations using an MCM trained dolphin (costing $314 per
hour) and a RHIB (costing $374 per hour). The cost per man-hour is $2,500, and it
costs $6,500 to detect, classify, and identify a mine.
UUV Operational Costs
An LCS (costing $16,000 per hour, with a 20% utilization rate) will use the Knifefish
(costing $121 per hour, plus $73 per hour for an operator) to hunt mines at a total
cost of $3,300 per hour. A mine will cost $529 to detect, classify, and identify, which
is 8% of the mission cost using a diving team.
102
C.2
Anti-submarine Warfare (ASW)
C.2.1
Hold-at-risk
Manned System Operational Costs
For a representative mission duration of 28 days, using an attack submarine (costing
$45,000 per hour with an estimated utilization of 75%) to monitor an enemy port or
a submarine choke-point of any size would cost a total of $20,917,000, or $31,000 per
loiter-hour.
UUV Operational Costs
To determine the number of underwater vehicles needed to patrol a choke-point to
guarantee submerged submarine detection, I first calculated the probability of detection Pdetection as
(C.1)
ttarget/tbarrier-
Pdetection
The time the target is in the barrier ttarget is
ttarget
-
(C.2)
'Wbarrier
where Wbarrier is the width of the barrier (twice the detection range of the AUV) in
nautical miles and Vsub is the speed of the exiting submarine (assumed to be 5 kts
[47]). The time taken by the AUV to cover the barrier tbarrier is
t arrier
(C.3)
1
barrier
60Vauv
where lbarrier is the length of the barrier and Vauv is the speed of the patrolling AUV
[47].
If the probability of detection was less than 100%, I found the number of UUVs
needed to ensure barrier coverage and a 100% probability of exiting submarine detection [471. As a representative barrier, I took lbarrier to be 5 nm and
103
Vsub
to be 5 kts
[47].
I assumed a stand-off distance of the UUV-launching ship to be 50 nm (the distance the USNS Impeccable was from Hainan Island in the South China Sea when an
incident occurred with Chinese naval and civilian vessels [122]).
REMUS 600 - Batteries
For REMUS 600 vehicles (costing $87 per hour, plus
$73 per hour for an operator for each vehicle), I estimated Vau, to be 3 kts [13] and
the detection range to be 2 nm (yielding a
yielded a
Pdetection
Wbarrier
of 4 nm) [123]. My calculations
of 48%, requiring three vehicles for full coverage. If the REMUS
600 is launched from a $14,000 per hour T-AGOS vessel (a ship commonly used for
anti-submarine activities [71]), I calculated the transit time to and from the barrier
location to be 33 hours, resulting in a 37 hour loiter time. Ship utilization would be
14%. Monitoring the barrier for 28 days requires 19 trips by the three-vehicle team.
The total mission cost would be $1,896,000, which is 9% of the cost of submarinebased hold-at-risk missions. Of the total cost, the ship accounts for 66% and the
UUVs account for 34%. I calculated that the cost per loiter-hour would be $2,800,
which is 9% of the per loiter-hour cost using a submarine.
REMUS 600 - Aluminum
Using the same speed, team size, stand-off distance,
and detection range assumptions as in the battery-powered REMUS 600 case, I calculated that for REMUS 600 vehicles using aluminum power (costing $107 per hour,
plus $73 per hour for an operator for each vehicle), loiter time would be 652 hours,
and a team of three vessels would need to make only two trips for the entire 28-day
monitoring period. I calculated a ship utilization rate of 1%, resulting in a total
mission cost of $867,000, of which 15% come from ship use and 85% come from the
REMUS 600 vessels. The mission costs would be 4% of those using a submarine, and
46% of those using battery-powered REMUS 600 vessels. The cost per loiter-hour
would be $1,334, 4% of the cost per loiter-hour using a submarine.
Z-Ray Glider
The Z-Ray glider (costing $48 per hour, plus $73 for a technician for
each glider) was originally designed for use in hold-at-risk type missions. Launched
104
from a T-AGOS ship (costing $14,000 per hour), gliding at Vau of 2 kts [16], and
with a detection range of 1 nm (the Z-Ray is a lower power vehicle than the REMUS
600) [123] yield a
Wbarrier
of 2 nm, I calculated
Pdetection
to be 16%. Seven gliders
would be needed to cover the barrier, and 50 hours would be needed to cover the
aforementioned stand-off distance. The team of seven gliders would need to make
only one trip (their loiter time being the full 672 hours), and ship utilization would
be 2%. The total mission cost would be $782,000, which is 4% of submarine holdat-risk costs, 41% of battery-powered REMUS costs, and 90% of aluminum-powered
REMUS costs. The cost per loiter-hour would be $1,164, which is 4% of the loiterhour costs of a submarine. Of the total costs, the ship costs would be 22%, and the
glider costs would be 78%.
C.2.2
ASW Training
Manned System Operational Costs
I assumed a representative two-day training mission. Using a Gotland-class submarine (costing $11,000 per hour), the total cost of the training exercise is $527,000.
Using a SSN-774 (costing $42,000 per hour), the total cost of the training exercise is
$1,992,000.
UUV Operational Costs
MK-39 EMATT
The MK-39 expendable mobile anti-submarine training target
(EMATT) is a common ASW training UUV, costs $3,500 (FY2007 $3,100) per unit
[47] (plus $73 per hour for an operator), and provides seven hours of training time,
mimicking the motion and sound signature of a potential target submarine [63].
I
assumed launch from a frigate ($19,000 per hour), a common ASW vessel [124]. For
two days of training, seven EMATT units would be needed, and ship utilization would
be 14% (calculated as the one hour estimated preparation and launch time, the sevenhour training period, assuming one EMATT is used at a time). Total mission cost
would be $158,000, 30% of the cost of training with a Gotland submarine, and 8%
105
of the cost of training with a SSN-774. Of the total cost, the ship accounts for 82%,
and the EMATTs account for 18%.
REMUS 600 - Batteries
Outfitted with the appropriate equipment, a REMUS
600 (costing $87 per hour, plus $73 per hour for an operator) could also serve as an
ASW training target. Only one REMUS would need to be used, with no recharging
needed. Also launched from a frigate ($19,000 per hour), with a ship utilization of
10%, the total cost per mission would be $102,000, which is 19% of the cost of training
using a Gotland submarine, 5% of the cost of training using a SSN-774, and 65% of
the cost of training using EMATTs. Of the total costs, 93% go toward ship use for
the UUV, and 7% go toward UUV operation.
C.3
C.3.1
Inspection and Identification (I&I)
In-water Survey and Hull Inspection
A Panamax ship (the largest ship that can travel through the Panama Canal [125])
can transport 4,000 TEU (twenty-foot equivalent unit, a standard cargo measure)
and costs $9 million per year to operate [126].
The cost per TEU on the 35-day
London to Singapore route [127] is approximately $1,200 (though per-TEU rates
change seasonally) [128]. I assumed 100% annual ship utilization, and found the total
Panamax value (operating costs plus freight opportunity costs) per hour to be $6,700.
I found the wetted surface area As, or the area which inspection divers must cover
during an in-water survey, as the mean of the Froude, Haslar, and Denny-Mumford
formulae for As [129]. Taking V as the volume of water displaced, L as ship length,
T as ship draft, and B as ship beam (all in meters), Froude finds
As
(C.4)
1/3
= V2/3
Haslar finds
As
= V
.
2 3
/
3
(2.09V1/3
106
)
(C.5)
and Denny-Mumford finds
As = L (1.7T + BCb),
(C.6)
where
C
=
LBT
(C.7)
and
V= D
0.98
(C.8)
where Dw is ship displacement in tonnes. I found the wetted surface area As of
Panamax and DDG-51 destroyer as representative vessels to be inspected.
For a
Panamax vessel, L is 290 m, B is 32 m, T is 12 m, and Dw is 60,000 tonnes [125].
Panamax As is 10,900 m2 . For a DDG-51 destroyer, L is 142 m, B is 18 m, T is 9
m, and D, is 8,800 tonnes [130]. DDG-51 destroyer As is 3,000 M 2 .
Manned System Operational Costs
Inspecting a ship hull for attached drug containers or limpet mines takes a total of
approximately 2 hours (for inspection, safety checks, etc.) [131] and is accomplished
by a team of six divers costing $1,657 per hour. The total cost of the inspection for a
Panamax is $17,000, of which 20% is the cost of the dive team, and 80% is the cost of
the inspected ship. For a DDG-51 destroyer, the inspection costs $70,000, of which
5% is for the inspection team, and 95% is ship opportunity costs.
A full inspection diving team (costing $5,715) will inspect a ship by swimming
back and forth in a row to cover the entire hull. I estimated diver swim speed to
be 0.25 kt [67], their side-to-side coverage to be 1 m (visibility is poor in harbor
situations), and a safety-factor of two (divers essentially have to cover the ship twice
to ensure full, safe coverage). The team will cover 3,500 m 2 per hour, and I estimated
diving and ship inspection prep time to be 2 hours. A Panamax vessel will take a
2
total of 5 hours to inspect, costing a total of $64,000, or $6 per m inspected. Of the
total cost, 54% is ship opportunity costs and 46% is diving team costs. A DDG-51
destroyer will take a total of 3 hours to inspect, costing a total of $112,000, or $37
107
per m 2 . Of the total cost, ship opportunity costs account for 85%, and inspection
team costs account for 15%.
UUV Operational Costs
A basic ship bottom inspection for attached objects is routinely completed using small
ROVs [67]. Such an ROV costs $1,424 (FY2012 $1,200) per day [5], plus an operator
costing $73 per hour, a project manager costing $195 per hour, and an RHIB at $374
per hour. The total cost per hour is $953, and each inspection takes approximately
an hour [131]. The inspection time is less since few safety precautions must be taken,
and the ROV can move quickly and focus more easily on trouble areas than a diver.
The total cost of inspection is $8,000, which is 46% of diver-based inspection costs.
Of the total cost, 88% is attributed to ship opportunity cost, and 12% is for ROV
operation. For a DDG-51 destroyer, the total cost is $34,000, which is 49% of a diverbased inspection. Of the total cost for a destroyer inspection using an ROV, 3% is
for ROV operation, and 97% is for ship opportunity costs.
The Bluefin HAUV (hovering AUV) is designed for autonomous in-water surveys,
and is estimated to cost approximately the same per hour as a Bluefin 21 UUV ($121
per hour), plus two operators for each HAUV [132] at $73 per hour per operator and
a project manager at $195 per hour. The HAUV can scan ship hulls at a rate of
50 m 2 /min [133], and I assumed that two robots are in use at once and inspection
preparation time is one hour [134], for a total cost per hour of $823. Two HAUVs can
inspect a Panamax in three hours with a total cost of $21,000, which is 33% of the
cost of using a diving team. Of the total cost, 88% represents ship opportunity costs,
and 12% represents HAUV use. Cost per m 2 inspected is $2. Inspecting a DDG-51
destroyer takes 1.5 hours with a total cost of $51,000, which is 46% of the cost of
a diver inspection. The ship opportunity cost is 97% of the total cost, and HAUV
operation is 3%. The cost per m 2 is $17.
108
C.3.2
Monitoring undersea infrastructure
Manned System Operational Costs
Cables are inspected by towing inspection ROVs behind T-AGOS equivalent ships
(costing $14,000 per hour). The ROV (and thus the accompanying ship) is limited
to a speed of 4 knots during inspection [135]. Mapping a representative distance of
400 km (a distance mapped by the Aqua Explorer 2000 AUV [70]) takes 54 hours.
It takes about an hour for the vehicle to reach the seafloor where inspections are to
take place [33] and an hour to return to the surface, resulting in a total mission time
of 56 hours. A ship utilization of 90% results in total mission costs of $730,000, or
$1,800 per kilometer of cable inspected. ROV operation costs were not considered.
If a longer representative distance of 4065 km is to be inspected (the distance from
Nova Scotia to Ireland), the total mission time is 550 hours, and the total mission
cost is $7,077,000, or $1,741 per kilometer.
UUV Operational Costs
REMUS 600 - Batteries
A battery-powered REMUS 600 vehicle (costing $87
per hour, plus $73 per hour for an operator), launched from a $14,000 per hour TAGOS type ship [136], could map the 400 km distance in 74 hours moving at 3 knots.
The Aqua Explorer 2000 demonstrated such a capability in 2000 [70]. With an ascent
and descent time totaling two hours [33], and accounting for a recharge during the
mission, the total mission time would be 86 hours, and the ship utilization 7%. The
mission cost would total $102,000, which is 14% of ship-based costs. Of the total
cost, the ship accounts for 86%, and the AUV accounts for 14%. Per kilometer costs
would be $254, or 14% of ship-based per kilometer inspection costs.
REMUS 600 - Aluminum
When using an aluminum-powered REMUS 600 vehi-
cle ($107 per hour, plus $73 per hour for an operator), much longer distances can be
inspected (such as the aforementioned stretch from Nova Scotia to Ireland) at even
lower costs. A single AUV would need a recharge during the mission, for a total
109
mission time of 765 hours and ship utilization of 1%. The mission cost would total
$218,000, which is 3% of the cost for ship-based inspections (and 20% of a similar
mission completed using a battery-powered REMUS vehicle). Of the mission costs,
the ship accounts for 37% and the REMUS 63%. The cost per kilometer inspected is
$54, which is 3% of the cost per kilometer inspect by a ship with an ROV.
110
Bibliography
[1] Wood Hole Oceanographic Institution, 2011. "Pioneer array AUVs: Image".
Website, www.whoi.edu. Accessed 17 Dec. 2013.
"Hydroid starts produc2013.
[2] Unmanned Systems Technology,
tion of littoral battlespace sensing AUVs for U.S. Navy".
Website,
www.unmannedsystemstechnology. com, Feb. Accessed 17 Dec. 2013.
[3] Bluefin Robotics, 2013.
"Bluefin-21".
Website, www.bluef in. com, Nov. Ac-
cessed 4 Nov. 2013.
[4] Autonomous Undersea Vehicle Applications Center, 2013. "Echo Ranger configuration". Website, www. auvac. org. Accessed 8 Nov. 2013.
[5] Oceaneering International, Inc., 2012. "Gulf of Mexico diving rate schedule".
Website, Americas Region Headquarters, www. oceaneering. com, Jan. Accessed
23 Oct. 2013.
[6] Bluefin Robotics, 2013. "Spray glider". Website, www. bluefin. com, Nov. Ac-
cessed 4 Dec. 2013.
[7] D'Spain, G., Zimmerman, R., Rimington, D., Lovejoy, M., McPeak, S., Price,
D., Jenkins, S., Luby, J., Brodsky, P., Honda, S., Pyle, J., Maclean, S., Legnos, P., Poscich, D., Swean, T., Paluszkiewicz, T., and Herr, F., 2010. "The
Liberdade (Stingray, XRay , ZRay) flying wing underwater glider program".
Presentation, U.S. Department of the Navy, Office of Naval Research, Arlington, VA.
[8] Christensen, C. M., 1997. The Innovator's Dilemma. Harvard Business School
Press, Boston, MA.
[9] U.S. Department of the Navy, 2004.
The Navy Unmanned Undersea Vehicle
(UUV) Master Plan. 9 Nov.
[10] Lockheed Martin, 2013.
"Marlin".
Website, www.lockheedmartin.com, Dec.
Accessed 13 Jan. 2014.
[11] Monterey Bay Aquarium Research Institute, 2013. "Marine technology research
at MBARI - underwater vehicles". Website, www. mbari. org, Apr. Accessed 13
Jan. 2014.
111
[12] Hydroid, Inc., 2011. "REMUS 100 Autonomous Underwater Vehicle". Brochure,
Kongsberg Gruppen, Pocasset, MA.
[13] Hydroid, Inc., 2011. "REMUS 600 Autonomous Underwater Vehicle". Brochure,
Kongsberg Gruppen, Pocasset, MA.
[14] Woods Hole Oceanographic Institution.
www.whoi.edu. Accessed 17 Dec. 2013.
"Slocum
glider".
Website,
[15] Shapiro, A. D., 2010. "Remotely piloted underwater glider crosses the Atlantic".
IEEE Spectrum, Feb. Website, spectrum. ieee. org. Accessed 25 Oct. 2013.
[16] Autonomous Undersea Vehicle Applications Center, 2013. "Xray liberdade platform". Website, www. auvac . org. Accessed 8 Nov. 2013.
[17] Pacchioli, D., 2000. "Catching fire". Website, Penn State, news.psu. edu, Jan.
Accessed 21 Dec. 2013.
[18] MIT Rapid Development Group, 2013. "Aluminum Permanganate-driven Power
System for the REMUS 600 Autonomous Underwater Vehicle". Report, MIT
2.013 System Engineering Fall 2013, Dec.
[19] Christensen, C. M., and Raynor, M. E., 2003. The Innovator's Solution: Creating and Sustaining Successful Growth. Harvard Business School Press, Boston,
MA.
[20] Christensen, C. M., Anthony, S. D., and Roth, E. A., 2004.
Seeing What's
Next: Using the Theories of Innovation to Predict Industry Change. Harvard
Business Review Press, Cambridge, MA.
[21] Dombrowski, P., and Gholz, E., 2009. "Identifying disruptive innovation: Innovation theory and the defense industry". Innovations, 4(2), Apr., pp. 101-117.
[22] Schuette, L., 2007. "Naval innovation and disruptive technology". Presentation,
Office of Naval Research, Sept. Website, www. dtic.mil. Accessed 18 Dec. 2013.
[23] Johnson, M., and McLaughlin, C., 2007.
"To defeat terrorists, military services must innovate, disrupt".
Website, National Defense,
www.nationaldef ensemagazine. com, Jan. Accessed 18 Dec. 2013.
[24] Wagen, C. M., 2012. "Twenty-first century defense and disruptive innovation".
Strategy research project, United States Army War College, Carlisle, PA, Mar.
[25] Yongjiranon, C., 2010. "Royal Thai Navy Unmanned Underwater Vehicle".
Website, TAN Network, www.thaivisa.com, July. Accessed 12 Dec. 2013.
[26] Naval Technology, 2013. "Hydroids LBS AUV enters full-rate production for
US Navy". Website, www.naval-technology. com, Feb. Accessed 5 Nov. 2013.
112
[27] Universiti Sains Malaysia, 2010. "USM Underwater Robotics System: A Multipurpose Malaysian Innovation". Website, www. auvac. org, Nov. Accessed 12
Dec. 2013.
[28] Yi, Y., 2013. "China's unmanned submersible mission hailed as successful".
Website, Xinhua, news . xinhuanet . com, Oct. Accessed 12 Dec. 2013.
[29] Unmanned, 2011. "Chinas unmanned underwater vehicle (UUV) to attempt
record dive". Website, www. unmanned. co.uk, Sept. Accessed 12 Dec. 2013.
[30] Robson, S., 2011. "Maritime drones make waves among navies worldwide".
Website, Stars and Stripes, www. stripes. com, Aug. Accessed 12 Dec. 2013.
[31] Sharkey, N., Goodman, M., and Ross, N., 2010.
"The coming robot crime
wave". Computer, 10, Aug., pp. 114-116.
[32] Krepinevich, A. F., 2011. "The terrorist threat beneath the waves". Website,
Wall Street Journal, online. wsj . com, Nov. Accessed 18 Dec. 2013.
[33] Paduan, J. B., Caress, D. W., Clague, D. A., Paull, C. K., and Thomas, H.,
2009. "High-resolution mapping of mass wasting, tectonic, and volcanic hazards
using the MBARI mapping AUV". In Extended abstracts of the International
Conference on Seafloor Mapping for Geohazard Assessment, F. Chiocci, D. Ridente, D. Casalbore, and A. Bosman, eds., no. 7, Societa Geologica Italiana,
pp. 181-186.
[34] MathWorld, W., 2014.
"Entropy".
Website, mathworld.wolfram. com, Jan.
Accessed 13 Jan. 2014.
[35] Gyftopoulos, E., and Beretta, G., 2010. Thermodynamics: Foundations and
Applications. Dover Civil and Mechanical Engineering. Dover Publications,
Mineola, NY.
[36] Herman, M., 1999. "Entropy-based Warfare: Modeling the Revolution in Mili-
tary Affairs". G-Animal's Journal(20), Mar., pp. 85-90.
[37] Zaloga, S., 2011. Spanish Civil War Tanks: The Proving Ground for Blitzkrieg.
New Vanguard Series. Osprey Publishing, Oxford, UK.
[38] Proctor, R. L., 1983. Hitler's Luftwaffe in the Spanish Civil War, Vol. 35 of
Contributions in Military History Series. Greenwood Publishing Group, West-
port, CT.
[39] Dixon, J. R., 2000. "UAV deployment in Kosovo: lessons for the operational
commander". Report, Naval War College, Newport, RI, Feb.
[40] Anthony, S. D., Johnson, M. W., Sinfield, J. V., and Altman, E. J., 2008. The
Innovator's Guide to Growth: Putting Disruptive Innovation to Work. Harvard
Business Review Press, Cambridge, MA, May.
113
[41] Ries, E., 2011. The Lean Startup: How Today's Entrepreneurs Use Continuous
Innovation to Create Radically Successful Businesses, first ed. Crown Business,
New York, NY, Sept.
[42] Morris, R., and Fischback, P. S., 2012. "Disruptive Technologies: The Navy's
Way Forward". U.S. Naval Institute Proceedings, 138(11), Nov.
[43] Scheve, T. "How the mq-9 reaper works".
Website, How Stuff Works,
science.howstuffworks. com. Accessed 19 Dec. 2013.
[44] Shanker, T., 2008. "At odds with Air Force, Army adds its own aviation unit".
New York Times, June. Website, www.nytimes. com. Accessed 12 Dec. 2013.
[45] Ackerman, S., 2010. "High-tech Army team turns from killers to airborne spies".
Website, Wired, www.wired. com, Aug. Accessed 19 Dec. 2013.
[46] United States Air Forces Central Command, 2012. "Combined Forces Air Component Commander 2007-2012 Airpower Statistics". Report, Combined Air and
Space Operations Center, Oct.
[47] Button, R. W., Kamp, J., Curtin, T. B., and Dryden, J., 2008. A Survey of
Missions for Unmanned Undersea Vehicles. RAND Corporation, Santa Monica,
CA.
[48] Wenner, P. G., van Amerom, F., Toler, S., Edkins, J., Koehn, K., Bell, R. J.,
Hall, M., and Short, R. "Real-time monitoring of aquatic environments with an
underwater mass spectrometer". Presentation, University of Southern Florida
Center for Ocean Technology, St. Petersberg, FL. Accessed 24 Oct. 2013.
[49] Alfred Wegener Institut. "Underwater mass spectrometry (UWMS)". White
paper, Helmholtz Gemeinschaft, Potsdam, Germany. Accessed 24 Oct. 2013.
[50] Dzielski, J., Gregar, M., and McDowell, D., 2003. "NAVOCEANO Seahorse
AUV participation in the Giant Shadow experiment". IEEE Oceans 2003 Proceedings, 2, Sept., pp. 1127-1131.
[51] Naylor, S. D., 2011. "The secret war: How U.S. hunted AQ in Africa". Navy
Times, Oct. Website, www.navytimes.com. Accessed 29 Oct. 2013.
[52] Webb, B., 2011. "Seal delivery vehicles & the secret war off the Horn of Africa".
Military.com: Kit Up, Nov. Website, kitup. military. com. Accessed 29 Oct.
2013.
[53] Jones, C., Creed, E., Glenn, S., Kerfoot, J., Kohut, J., Mudgal, C., and
Schofield, 0.
"Slocum gliders - a component of operational oceanography". White paper, Rutgers University, New Brunswick, NJ. Website,
marine . rutgers . edu Accessed 17 Oct. 2013.
114
[54] Brekke, K., Caress, D., Conlin, D., Dawe, T. C., Hamilton, A., Henthorn, R.,
Jensen, S., Kirkwood, B., McEwen, R., McGill, P., Osbourne, D., Salamy, K.,
Shane, F., Sibenac, M., Talkovic, M., Thomas, H., and Thompson, D., 2007.
"Autonomous underwater vehicle D. Allan B. maps the deep seafloor". Website,
Monterey Bay Aquarium Research Institute, www.mbari. org. Accessed 25 Oct.
2013.
[55] Woods Hole Oceanographic Institution.
Accessed 24 Oct. 2013.
"Remus".
Website, www.whoi.edu.
[56] U.S. Department of the Navy, 2012. "Orion - towed side scan sonar". Website,
www.navy.mil, Nov. Accessed 11 Nov. 2013.
[57] Purcell, M., Gallo, D., Packard, G., Dennett, M., Sherrell, A., Pascaud, S.,
and Rothenbeck, M., 2011. "Use of remus 6000 auvs in the search for the air
france flight 447". IEEE Oceans 2011 Proceedings, Sept., pp. 1-7.
[58] ATLAS Elektronik. "ATLAS Seafox: ROV for identification and mine disposal". Product summary, Bremen, Germany. Accessed 24 Oct. 2013.
[59] Ackerman, S., 2012. "Navy will give nearsighted minehunter robotic glasses".
Wired. Website, www. wired. com. Accessed 10 Aug. 2013.
[60] Jean, G. V., 2008. "Diesel-Electric Submarines, the U.S. Navys Latest Annoyance". National Defense, Apr. Website, www. nationaldef ensemagazine. org.
Accessed 13 Jan. 2014.
[61] Martin, D. L., 2005. "Autonomous platforms in persistent littoral undersea
surveillance: Scientific and systems engineering challenges". Presentation, Applied Physics Laboratory University of Washington, Seattle, WA, Oct.
[62] Hamilton, M. J., Kemna, S., and Hughes, D. T., 2010. "Antisubmarine warfare applications for autonomous underwater vehicles: The GLINT09 field trial
results". Journal of Field Robotics, 27(6), pp. 890-902.
"MK 39 Expendable Mobile Anti[63] U.S. Department of the Navy, 2012.
submarine Warfare Training Target (EMATT)". Website, United States Navy
Fact File, www.navy.mil. Accessed 25 Oct. 2013.
[64] Samuel, H., 2013. "'Narco-torpedoes' and frogmen: drug smuggling ring busted
in Rotterdam". The Telegraph. Website, www. telegraph. co. uk. Accessed 25
Oct. 2013.
[65] Hench, D., 2013. "Navy SEALs train local law enforcement for terrorist attack".
PortlandPress Herald. Website, www .pressherald. com. Accessed 25 Oct. 2013.
[66] International Association of Classification Societies, 2011. "Requirement concerning survey and certification". Requirements document, London, UK.
115
[67] Baker, A., 2011. "Underwater drones giving more eyes to police harbor unit as
searches grow". New York Times, Dec. Website, www. nytimes. com. Accessed
28 Oct. 2013.
[68] British Broadcasting Corp., 2013. "Egypt arrests as undersea internet cable cut
off Alexandria". Website, www.bbc.co.uk, Mar. Accessed 25 Oct. 2013.
[69] Autonomous Undersea Vehicle Applications Center, 2013. "Aqua Explorer 2000
configuration". Website, www. auvac. org. Accessed 20 Oct. 2013.
[70] Asakawa, K., Kojima, J., Kato, Y.,
Iso, T., 2002. "Design concept and
underwater vehicle Aqua Explorer 2
Advanced Robotics, 16(1), Jan., pp.
Matsumoto, S., Kato, N., Asai, T., and
experimental results of the autonomous
for the inspection of underwater cables".
27-42.
[71] U.S. Department of the Navy, 2008. "Operation of the surveillance towed array
sensor system low frequency active (SURTASS LFA) sonar onboard the R/V
Cory Chouest and USNS Impeccable (T-AGOS 23)". Annual report, Chief of
Naval Operations, Sept.
[72] Clark, V., 2002. "Seapower 21: Projecting decisive joint capabilities". United
States Naval Institute Proceedings, 128(10), Oct., p. 32.
[73] U.S. Bureau of Labor Statistics, 2013. "CPI inflation calculator": Website, U.S.
Department of Labor, www.bls.gov, Nov. Accessed 18 Nov. 2013.
[74] Elmendorf, D. W., 2010. "Life-cycle costs of four types of ships". Letter, U.S.
Congress, Congressional Budget Office, Washington, D.C., Apr.
[75] Burke, S. E., 2012. "Notification of updated guidance for the calculation of the
fully burdened cost of energy in analyses of alternatives and acquisition programs". Memorandum, Department of Defense, Assistant Secretary of Defense,
Washington, D.C., Aug.
[76] U.S. Department of the Navy, 2012. "Attack submarines - SSN".
www.navy.mil, Nov. Accessed 18 Nov. 2013.
Website,
[77] O'Rourke, R., 2013. "Navy Virginia (SSN-774) class attack submarine procurement: Background and issues for Congress". Report, U.S. Congress, Congressional Research Service, Washington, D.C., Sept.
[78] U.S. Department of the Navy, 2013. "Submarine frequently asked questions".
Website, U.S. Department of the Navy, Chief of Naval Operations, Submarine
Warfare Division, www.navy.mil. Access 18 Nov. 2013.
[79] Federation of American Scientists, 2013. "SSN-774 Virginia-class NSSN new
attack submarine centurion overview". Website, www. f as. org. Accessed 18
Nov. 2013.
116
[80] U.S.
Department
of the
Navy,
2013.
"Amphibious
assault
ships -
LHA/LHD/LHA(R)". Website, www.navy.mil, Nov. Accessed 6 Nov. 2013.
[81] U.S. Government Accountability Office, 2013. "Defense acquisitions: Assessments of selected weapons programs". Report to Congressional Committees,
Washington, D.C., Mar.
[82] U.S. Department of the Navy, 2008. "Ocean surveillance ships - T-AGOS".
Website, www.navy.mil, Jan. Accessed 8 Nov. 2013.
[83] Department of Defense, 1990. "Acquisition Management of the Small Waterplane Area Twin Hull Ocean Surveillance Ships". Audit report, Office of the
Inspector General, Arlington, VA, Mar.
[84] Naval Technology, 2013. "SSK Gotland Class (Type A19), Sweden". Website,
www.naval-technology. com. Accessed 18 Nov. 2013.
[85] Military-Today, 2013.
"Gotland class".
Website, www.military-today.com.
Accessed 18 Nov. 2013.
[86] Cage, P., 2005. "Swedish submarine HMS Gotland arrives in San Diego". Press
release, U.S. Department of the Navy, Fleet Public Affairs Center Pacific, June.
Website, www.navy.mil. Accessed 18 Nov. 2013.
[87] Vego, M., 2010. "The right submarine for lurking in the littorals". U.S. Naval
Institute Proceedings Magazine, 136(6), June, p. 288. Website, www.usni. org.
Accessed 11 Nov. 2013.
[88] Wertheim, E., 2007. The Naval Institute Guide to Combat Fleets of the World:
Their Ships, Aircraft, and Systems, fifteenth ed. Naval Institute Press, Annapo-
lis, MD.
[89] Cole, W., 2009. "Prototype mini-sub shelved". Honolulu Star Advertiser, July.
Website, the. honoluluadvertiser . com. Accessed 18 Nov. 2013.
[90] Federal Business Opportunities, 2009. "Shallow Water Combat Submersible
(SWCS)". Proposal solicitation, U.S. Special Operations Command, Oct. Website, www.fbo.gov. Accessed 1 Nov. 2013.
[91] Navy Seal Museum, 2013. "SEAL delivery vehicles: Manned combatant submersibles for maritime special operations". Website, www . navysealmuseum. com.
Accessed 18 Nov. 2013.
[92] Warboats.org, 2012. "NAVSPECWARCOM - New assets, changing roles and
missions". Website, www. warboats. org. Accessed 18 Nov. 2013.
[93] U.S. Department of the Navy, 2012.
"Rigid hull inflatable boats - RHIB".
Website, www.navy.mil, Nov. Accessed 18 Nov. 2013.
117
[94 U.S. Department of Defense, 2011. "Contract No. 835-11".
Contract, Office
of the Assistant Secretary of Defense (Public Affairs), Washington, D.C., Sept.
Website, www.defense.gov/contracts. Accessed 19 Nov. 2013.
[95] U.S. Department of Defense, 2005. "Contract No. 273-05". Contract, Office
of the Assistant Secretary of Defense (Public Affairs), Washington, D.C., Mar.
Website, www.defense.gov/contracts. Accessed 18 Nov. 2013.
[96] U.S. Department of the Navy, 2013. "Frequently asked questions".
www. navy. com. Accessed 1 Nov. 2013.
Website,
[97] Council of Industrial Boiler Owners, 2004. "Energy efficiency & industrial boiler
efficiency: An industry perspective". White paper, Warrenton, VA. Website,
www.swagelokenergy. com. Accessed 4 Nov. 2013.
[98] Oil-Price.net, 2013. "Crude oil and commodity prices: WTI crude oil, 4 November 2013". Website, www.oil-prices.net, Nov. Accessed 4 Nov. 2013.
[99] Wilcox, J., 2012. Carbon Capture. Springer, New York, NY. pp. 236.
[100] Amazon.com, 2013.
"Metallic aluminum bb 0.30g 2500 rounds".
Website,
www. amazon. com, July. Accessed 8 Jul. 2013.
[101] MIT 2.013-2.014 Systems Engineering, 2012. REMUS 600 hybrid power system.
Talk at MIT Lincoln Laboratory (unpublished).
[102] Hagen, P. E., Stoerkersen, N., Vestgaard, K., Kartvedt, P., and Sten, G., 2003.
"Operational military use of the HUGIN AUV in Norway". In UDT Europe
2003.
[103] U.S. Department of Defense, 2007. "Contract No. 545-07". Contract, Office
of the Assistant Secretary of Defense (Public Affairs), Washington, D.C., May.
Website, www.defense.gov/contracts. Accessed 5 Nov. 2013.
[104] Naval Postgraduate School, 2013. "2024: Unmanned Undersea Warfare Concept". Presentation, U.S. Department of the Navy, Monterey, CA. Website,
www.nps.edu. Accessed 8 Nov. 2013.
[105] Hydroid, Inc., 2012. "REMUS 600-S". Brochure, Kongsberg Maritime, Pocasset, MA, May. Website, www.km.kongsberg.com. Accessed 5 Nov. 2013.
[106] Hewitt, J., 2012. "U.S. Navy finally starts replacing killer dolphins with minehunting Knifefish drones".
Website, www. extremetech. com, Nov. Accessed 4
Nov. 2013.
[107] Smith, R., 2013. "General Dynamics' "Knifefish" robo-sub is swimming fine".
Website, www. fool. com, Aug. Accessed 4 Nov. 2013.
118
[108] Stokey, R. P., Roup, A., von Alt, C., Allen, B., Forrester, N., Austin, T.,
Goldsborough, R., Purcell, M., Jaffre, F., Packard, G., and Kukulya, A., 2005.
"Development of the REMUS 600 autonomous underwater vehicle". White
paper, Woods Hole Oceanographic Institution, Woods Hole, MA.
[109] AllAboutBatteries.com, 2011.
"Energy storage in D batteries".
www. allaboutbatteries. com. Accessed 8 Nov. 2013.
Website,
[110] Davis, R. E., Eriksen, C. E., and Jones, C. P., 2003. "Autonomous buoyancydriven underwater gliders". In Technology and Applications of Autonomous
Underwater Vehicles, G. Griffiths, ed. Taylor and Francis, London, UK, chapter 3, pp. 37-58.
[111] Laytner, R., 2008. "Anti-terror squad". Website, DiverNet, www. divernet .com.
Accessed 28 Oct. 2013.
[112] Air Sea Land Applications Center, 2011. "Multi-service Tactics, Techniques,
and Procedures for Military Dive Operations". Website, U.S. Joint Forces Command, rdl.train. army.mil, May. Accessed 30 Oct. 2013.
[113] Gaskell, S., 2009. "Three Navy SEALS freed Capt. Phillips from pirates with
simultaneous shots from 100 feet away". New York Daily News, Apr. Website,
www.nydailynews. com. Accessed 20 Jul. 2013.
[114] U.S. Department of the Navy, 2013. "Service demands". Website, Naval Special
Warfare Command, www. sealswcc. com, Nov. Accessed 1 Nov. 2013.
[115] Associated Press, 2012. "U.S. Navy's mine-hunting dolphins will be replaced by
robots in 2017". The Guardian,Dec. Website, www. theguardian. com. Accessed
23 Jul. 2013.
[116] Larsen, K., 2011. "Harnessing the military power of animal intelligence". CNN,
Aug. Website, www. cnn. com. Accessed 23 Jul. 2013.
[117] National Geographic Society, 2013. "Bottlenose Dolphin (Tursiops truncatus)".
Website, animals .nationalgeographic.com, Nov. Accessed 11 Nov. 2013.
[118] Steele, J., 2012. "Navy dolphins' work will be outsourced". UT San Diego, Dec.
Website, www.utsandiego.com. Accessed 18 Oct. 2013.
"Seal delivery vehicles SDV".
[119] SpecialOperations.com, 2000.
www. specialoperations. com. Accessed 6 Nov. 2013.
Website,
[120] Hodges, J., 2009. "Revolution in waiting: Commercial work trumps military
in evolution of unmanned undersea vehicles". Defense News, July. Website,
www.defensenews. com. Accessed 22 Jul. 2013.
[121] NavySeals.com, 2013. "Structure". Website, www. navyseals. com. Accessed 2
Dec. 2013.
119
[122] Pedrozo, R., 2009. "Close encounters at sea: The USNS Impeccable incident".
Naval War College Review, 62(3), June, pp. 101-111.
[123] Mellinger, D. K., and Klinck, H., 2012. "Passive autonomous acoustic monitoring of marine mammals with seagliders". White paper, U.S. Department of the
Navy, Office of Naval Research, Arlington, VA.
[124] U.S. Department of the Navy, 2013. "Frigates - FFG". Website, United States
Navy Fact File, www.navy.mil. Accessed 5 Dec. 2013.
[125] Autoridad del Canal de Panama, 2005. "Vessel requirements". Notice, Republica de Panama, Jan.
[126] Rodrigue, J.-P., 2013. "Operating costs of Panamax and Post-panamax containerships (in USD)". Website, Hofstra University, Dept. of Global Studies
and Geography, people.hofstra.edu. Accessed 29 Oct. 2013.
[127] George, R., 2013. "Container shipping: the secretive industry crucial to our
existence". The Telegraph, Sept. Website, www. telegraph. co.uk. Accessed 29
Oct. 2013.
[128] Wienberg, S. H. . C., 2013. "Maersk four rate rises fail to spread as demand
falls: Freight". Bloomberg, Oct. Website, www.bloomberg.com. Accessed 29
Oct. 2013.
[129] Ingram, B. T., Ussery, R., and Yates, W. M., 2013. "Vehicle control system
and methods". U.S. Patent #20130261914 Al, W. Morrison Consulting Group,
Inc., U.S. Patent and Trademark Office, Alexandria, VA, Oct.
[130] U.S. Department of the Navy, 2013.
"Destoyers - DDG".
www.navy.mil, Nov. Accessed 6 Dec. 2013.
Website,
[131] Anderson, C., 2011. "ICE dive unit in Miami targets drug smuggler ships".
Washington Post, Feb. Website, www.washingtonpost .com. Accessed 28 Oct.
2013.
[132] Bluefin Robotics, 2013. "HAUV". Website, www.bluefinrobotics.com. Accessed 13 Aug. 2013.
[133] Vaganay, J., Gurfinkel, L., Elkins, M., Jankins, D., and Shurn, K., 2009. "Hovering autonomous underwater vehicle - system design improvements and performance evaluation results". In UUST 2009, pp. 1-14.
[134] Bluefin Robotics, 2013. "HAUV". Website, www. bluef in. com. Accessed 18
Jul. 2013.
[135] Louis Dreyfus TravOcean, 2013. "Submarine cable installation: General presentation". Service report, Louis Dreyfus Armateurs, Marseilles, France, Jan.
120
[136] Anderson, C., 2005. "Pipeline inspection". Presentation, The Hydrographic Society, Stolt Offshore, Aberdeen, UK, Apr. Website, www. ths. org. uk. Accessed
14 Nov. 2013.
121