Propulsion via Buoyancy Driven Boundary Layer
Flows
by
Brian Patrick Doyle
Submitted to the Department of Mechanical Engineering
in partial fulfillment of the requirements for the degree of
Bachelor of Science in Mechanical Engineering
MASSACHUSE7SNiliTE
OF TECHNOLOGY
at the
OCT
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
LIBRARIES
June 2011
@ Massachusetts Institute of Technology 2011. All rights reserved.
.............
................
Department of Mechanical Engineering
May 8, 2011
Author .................
Z11-,
Certified by ..............
.....
'
Accepted by ................
V
.......
V
'........-.....
Thomas Peacock
Associate Professor
Thesis Supervisor
...
2 0 2011
.....
hn H. Li enhard -V
Collins Professor of Mechanical Engineering
2
Propulsion via Buoyancy Driven Boundary Layer Flows
by
Brian Patrick Doyle
Submitted to the Department of Mechanical Engineering
on May 8, 2011, in partial fulfillment of the
requirements for the degree of
Bachelor of Science in Mechanical Engineering
Abstract
Heating a sloped surface generates a well-studied boundary layer flow, but the resulting surface forces have never been studied in propulsion applications. We built
a triangular wedge to test this effect by mounting a resistive heating pad to one of
its conducting sloped surfaces. We submerge the wedge within a two-layer water
stratification, turn the heater on and track the wedge's motion. We have observed a
propulsion speed of 0.613 ± 0.042 mm/s with a temperature difference between the
heated surface and ambient fluid of 4*C. We also use theory and numerics to predict
the propulsion speed and predicted a speed of 1.43 mm/s, within an order of magnitude of the observed results, and thus our model was validated by the experiments.
Thesis Supervisor: Thomas Peacock
Title: Associate Professor
3
4
Acknowledgments
I would like to thank Michael Allshouse for his assistance with my experiments, Professor Arezoo Ardekani for her assistance with my theoretical modeling, Andy Gallant
for his help prototyping and building the wedge, and Professor Thomas Peacock for
his guidance throughout the entire research project.
5
6
Contents
1 Introduction
11
2 Theoretical and Numerical Analysis
13
3
2.1
Theoretical Analysis .......
2.2
Numerical Simulations ..........................
...........................
Experimental Apparatus
3.1
13
17
21
3.0.1
Wedge Prototype . . . . . . . . . . . . . . . . . . . . . . . . .
21
3.0.2
Experimental Set Up . . . . . . . . . . . . . . . . . . . . . . .
22
Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
3.1.1
25
D iscussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Conclusions
29
7
8
List of Figures
2-1
Schem atic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
2-2
Pressure Explanation . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
2-3
Numerical Boundary Layer Flow . . . . . . . . . . . . . . . . . . . . .
18
2-4
Comparison of Theory and Numerics . . . . . . . . . . . . . . . . . .
19
2-5
Log-Log Plot of Drag Force
. . . . . . . . . . . . . . . . . . . . . . .
19
3-1
Wedge Balancing Set Up . . . . . . . . . . . . . . . . . . . . . . . . .
22
3-2
Temperature Measurements in Thermal Baths . . . . . . . . . . . . .
23
3-3
Experimental Set Up . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
3-4
Wedge Corner Position Over Time
. . . . . . . . . . . . . . . . . . .
26
3-5
Wedge Velocity Verses Time . . . . . . . . . . . . . . . . . . . . . . .
27
9
10
Chapter 1
Introduction
Buoyany driven flows are very common in nature, a few examples being winds in
valleys and icebergs. However, research on buoyancy driven flows focus on the case of
a fixed boundary [3]. Meanwhile, diffusion-driven flows have been shown to have the
ability to propel objects, albeit at very slow speeds, but a related effect [1]. Because
buoyancy driven flows have significantly stronger boundary layer flows their potential
to propel objects is especially interesting. As the effect scales with the temperature
difference, an accurate characterization of the effect would allow for extrapolation
to many applications. We ran experiments to determine the propulsion speeds a
wedge can acheive given a heated surface at a greater temperature than the ambient
fluid it is suspended in. First we analytically modeled the situation and also used
numerical simulations to predict the resulting boundary-layer flow and surface forces.
For our models we simplified the sitaution to a two-dimensional case and ignored
edge effects and then extrapolated our two-dimensional solution to three dimensions.
Then we designed the wedge to meet all of our specifications. We carefully measured
the temperature difference and propulsion speed achieved. Finally we compared the
experimental results to the theoretical and numerical propulsion predictions to assess
our model.
11
12
Chapter 2
Theoretical and Numerical
Analysis
2.1
Theoretical Analysis
T.
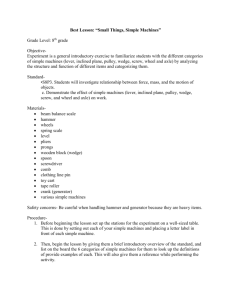
Figure 2-1: Schematic
In order to estimate the propulsion force on the wedge the forces on an inclined
heated plate need to be examined. The wedge has two sloped surfaces, one of which
is heated, however for our model we will make certain simplifications. We consider
the two-dimensional problem of an inclined plate immersed in an ambient fluid at
temperatuer T,,
as shown in figure 2 - 1.
The surface temperature of the plate
increases to T,, its heated temperature once the wedge is turned on. This temperature
difference causes a change in density of the local fluid due to the thermal expansion
coefficient of the fluid, and thus the density decreases and becomes p = p,[I - ,(T -
13
T,)], where p00 is the density of the fluid at the ambient conditions, 3 is the thermal
expansion coefficient of the fluid, T is the temperature of the fluid and p is the density
of the fluid.
Once the system reaches a steady state, the force can be estimated using the
solution for natural convection on a heated sloped surface [4]. The governing equations
come from the continuity equation subject to incompressibility, Navier Stokes along
and perpendicular to the slope, as well as the energy equation, as seen in equations
(2.1) to (2.4). Figure 2 - 1 shows the orientation of the coordinate system along and
perpendicular to the slope.
Ou
u
Ou
+v-
Ou
+
Ov
-=0
(2.1)
0 2U
l op
- --+v
+ g/3(T - T00)sin
Oy
p" Ox
O2 y
0 =-
(2.2)
1 Op
- g#(T - T)coso
Poo y
(2.3)
OT
OT
02T
(24)
OX
-5y
C52y
u v=0,T=Taty=0
(2.5)
U = 0, T = T outside the boundary layer
(2.6)
Here u is the parallel velocity, v the perpendicular velocity, p the pressure distribution, T the temperature distribution,
# the angle
of inclination, g the acceleration
due to gravity and a the thermal diffusivity of the fluid. Equations (2.5) and (2.6) are
the boundary conditions for the problem; no slip at the surface and no flow outside
of the boundary layer respectively. The force on the wedge results from a shear force
due to the boundary flow as well as a pressure force resulting from the change of
14
density of the boundary layer fluid. The shear force acts in the same direction as the
flow intuitively, while the pressure force acts in the opposite direction.
The intuition behind the direction of the pressure force can be understood by
referring to figure 2-2. By starting at a point of equal pressure, depicted here as P2,
and integrating up to two points at the same height on opposite sides of the wedge
it becomes clear that the heated side has a greater pressure. The pressure below the
wedge can be written as:
P1 +
P2
pi(z)gdz = Po + fPo(z)gdz
(2.7)
Since the density within the boundary layer on the heated side is less than the
density of the corresponding fluid on the non-heated side, the integral component of
the heated side's pressure equation is less than the non-heated side's. As a result the
pressure on the heated side must be greater than the non-heated side for equation
(2.7) to be verified. This reasoning can be generalized to show that every point on the
heated side has a greater pressure than the corresponding point on the non-heated
side and as a result the pressure force clearly acts away from the heated side.
P1
PO
Heated Side
Boundary Layer
p0(z)
p1(z)
P=P2
Figure 2-2: Pressure Explanation
An expression for the pressure at the surface can be analytically obtained via
15
equation (2.3) as:
P-Y=
=
pxg/Ocos#(T - To)
where 0 = (T - T-)/(T,
T).
j
(2.8)
Ody
Umemura et al. shows that transition from
horizontal-plate-like flow to vertical-plate-like flow occurs at some steamwise distance,
xt,
along the surface, which depends on the inclination angle and the strength of the
buoyant force, (g3(T8 - Tx)/v2) 1 / 3 [4]. For our case xt is negligible relative to the
wedge length so we adopt the similarity solution for the vertical case.
In order to solve the governing equations they must be non-dimensionalized using
a similarity parameter 7
(
=
where Grx=
gf3
-T"x
is the Grashof
number and Pr = g is the Prandtl number, comparing v the kinematic viscosity of
the fluid and a its thermal diffusivity. The velocity and temperature equations take
the form shown in equations (2.9) through (2.13):
2v
u= -Gr/
f'±
f
2
f'(77)
(2.9)
3ff" - 2f'2 +0= 0
(2.10)
3PrfO"0' = 0
(2.11)
f'= 0, 0 = 1 at 77 = 0
f' - 0, 0 - 0 at q -
oo
(2.12)
(2.13)
These equations can be solved using Maple, and from them the shear and pressure
forces are predicted. The shear force is generally r = pU!,
with u in our case being
the parallel velocity and y being the perpendicular distance from the face. Thus, we
can estimate the hoirzontal force per area to be:
16
S= pj,=osin0#-rj=ocos0= vp0u 21/4 c0s0
g3sin(T, - T.)
3 4
oop
(2.14)
By integrating from 0 to L, where L is the length of the heated plate, the total
force acting on the heated plate of width W can be obtained as:
FxGr
W-
3
4 8di
5 L GrL
(J
- f"()
(2.15)
Our experimental set up uses water with P, = 10, a heated surface angle of
0 = 26.60, a length of 11.2 cm and a temperature difference of 4'C, the horizontal
force on wedge is predicted to be 6.882 - 10-6N away from the heated side, as the
pressure force is greater than the shear.
2.2
Numerical Simulations
In order to validate the analytical solution and provide further information regarding
the flow structure, we ran numerical simulations for the system using COMSOL. In
the simulations we suspended the wedge within the same two layer water system
used in the experiments and set the temperature of the heated surface to the value
of 4*C greater than the ambient fluid as observed in the experiments. We ran the
simulations for two different tank widths to investigate the effect of a backflow which
is dependent on the domain size.
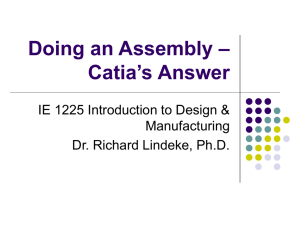
Figure 2 - 3 displays the boundary layer flow predicted by the numerical simulations, with red signifying the maximum flow speed of 5mm/s. We determined the
propulsion force in a similar manner to the analytical calculation as the difference
between the pressure and shear forces. For the 50cm tank the numerics predicted a
propulsion force of 3.6932 - 10-6N while for the 110cm tank a force of 4.106 - 10-6N.
In both cases the pressure force was greater than the shear so the propulsion force on
the wedge is predicted to be away from the heater.
We also wanted to confirm that the numerics and theory both predict the same
17
Figure 2-3: Numerical Boundary Layer Flow
boundary layer flow and ensure the agreement between theory and numerics.
To
do this we choose a location along the heated surface of the wedge to compare the
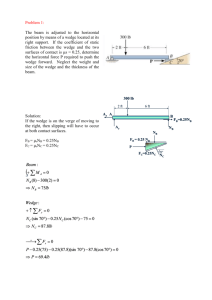
velocity profile and shear force. Figure 2 - 4(a) shows the two velocity profiles at
a distance of 7cm from the bottom of the wedge. Figure 2 - 4(b) shows a second
order fit to the velocity profile from the numerics at this location which we used to
determine the shear force,
N/M
2
T =
ptu. Theory predicts a shear force of 5.7034 - 10-3
at this location and the numerics predicts a shear force of 5.4486 - 10-3 N/M 2.
Because these results are very close we can conclude that the numerics and theory
seem to be in accordance and the numerical force predictions are reliable.
Lastly, we used COMSOL to model the drag force on the wedge, which we compared with the propulsion force in order to predict the propulsion speed, as the two
will balance in steady state. We predicted the drag force by inducing a flow field
around a three-dimensional model of the wedge and extracted the viscous surface
forces. We calculated the drag force for wedge speeds of 0.1, 0.5, and 1 mm/s, bounding the wedge speeds observed. For the wedge speed of 0.1 mm/s the drag force is
1.382- 10-7N, for the wedge speed of 0.5 mm/s the force is 8.525 - 10-7N and for the
wedge speed of 1 mm/s is 2.085 -10-6 N. Figure 2 -5 displays a plot of the drag force
verses wedge speed. The relationship appears linear and a first-order fit was used for
the drag force to predict the propulsion speed, which we predict to be 1.43 mm/s.
18
x 10,
Profile at 7cm
4.5
. . ........
........
. ...
...................... .
4 - --
......
3 .5 ... ...
2 .5 .. .....
........... ......
.......
-----....... ..........
....... ...........
...........
...........
......... ...... ...
........
.......... ........... ..........
1 .5 -
........
....... : .......... ..... ..... ........... .......... ......................
........... ..........
0 .5
...... .............
0
0.002
...........
0. 64
...........
........... ...
........ .......................
.......
......... ....................... ..... ..... ......
-0.5
...... ...........
....................
.......
................. ........... .......... ........... ........... ......................
...... ...........
...... . ................... ........... ..........
............ ......
........... ..........
M
Numerical Mesh
Ana" cal
-
......
...
..
........
... .....
....
......
........ ..
0.006
0.008
O.OLI
O.-L 12
0.01 4---0. OLl 6
Perpendicular distance from face (m)
0.018
0.02
(a) Velocity Profile at 7cm
Velocity Profile Fit
(10-,
4.5 .....................
................ ..........
........
Velo city:F:Wd
4 ..................... . ................... . ...... ......
3.5 ...................
7
....................
2 ..........
U..
..... .....
....
.........
.........
2.5
Second Order Fit
........... ............. ......
....
....... ..............
..........
3
......... .........
.....
.................... .........
................. ....................
.......... ..........
1.5 ........... ..............................
.........
.......... ..
.....
.....
0
-1
..---------
......... ......... ............. ......
1 ............ ....... .......... .......... ......... .................... ..........
0.5
.....
.......................... ......... .................. ........ .................... .........
......... ........
0
......
............
..... ................... .......... .......... ..... ...... ......
............ .....
.........
.......
------ - ......... .........
3
i
i
i
i
9
Perpendicular Distwon, From Facs(m)
.......
1
x 10,
(b) Velocity Profile Fit
Figure 2-4: Comparison of Theory and Numerics
x 10-6
5 ..........
... ...... .......... ........... ........... ........... ........
...
.........
...... .......... ......... -
.....
........................... ........... ............
........... ..... ........
-----------........... ..... ...
...
3 ......... ....
0
LL
tx 2 .......... ......... ............ ......... ...................................... ................. .......
....................
........... ........... ........
........... ........... .......... ..
.......
....
... ..... ....
0 -.-.- ....
0
0.2
0.4
0.6
...........
0.8
1
1.2
Speed(m/s)
Numerical Data
...........
Fit
1 .4
1.6
1.8
Figure 2-5: Log-Log Plot of Drag Force
19
2
X10-3
20
Chapter 3
Experimental Apparatus
3.0.1
Wedge Prototype
We designed the wedge to meet particular specifications so that it would be able to
demonstrate the desired effect. This included locating its center of gravity below its
geometric center by concentrating weight in the bottom of the wedge in order to make
it balance upside-down, an inherently unstable orientation. We also designed it to
have a density between fresh water and saturated salt water, 1000 to 1200 kg/m 3 , so
that it would float within a stratification. We also had to balance the wedge about
its axes before we could run tests because the battery was not fully constrained. By
using a two layer system with water at density 1070 kg/M 3 below a layer of vegetabe
oil we could itteratively adjust the battery position until the wedge sat level, as seen
in figure 3 - 1.
In terms of functionability its internal circuitry consists of a lithium polymer
rechargeable battery, a radio activated switch, and a resistive heating pad. The system has to be radio controlled so that the wedge can be free floating after it is released
without external forces acting on it before the propulsion forces are initiated. Because
of the resistive nature of the heating pad the wedge system is heat flux limited, so
rather than the heater inducing a controllable temperature difference the wedge outputs a given heat flux. Thus we have to measure the achieved temperature difference
as it will vary based on the properties of the ambient fluid. We ran our tempera21
Figure 3-1: Wedge Balancing Set Up
ture measurements in constant temperature baths with ambient water temperatures
bounded by those seen in the lab, 19'C and 21*C. In order to measure the temperature difference we mounted thermocouples at the center of the heated surface and at
the same location on the opposite face. Figures 3 - 2(a) and 3 - 2(b) show the measured temperature plots verses time for each ambient fluid temperature respectively.
The temperature differences we measured were 3.83 t 0.09'C for the 19'C bath and
3.93 ± 0.20 C for the 21*C bath.
3.0.2
Experimental Set Up
We ran our experiments in a thermal chamber that uses feedback control to maintain
a constant air temperature with the goal of minimizing the thermal gradients in the
water for the experiments. In setting up for the propulsion measurements we first fill
3
the tank with our two layer system as seen in figure 3 - 3. We fill a 70 x 40 x 50 cm
with salt water at density 1070 kg/m
3
up to 8 cm below the top of the tank. Then
we slowly pump fresh water into the tank through a sponge floating on the surface of
the water. The sponge prevents mixing between the fresh and salt water and allows
us to establish a clear two layer system. Next we carefully put the wedge into the
tank and lower a cage which fully constrains the wedge's planar motion. The cage
consists of six vertical rods, two on each long side of the wedge and one at each end,
22
-
-- -.--- ...
--
- -.
--
---..
2 4 --- - --.
-- -
-- -
4
2 2 - --
-
19-
0
-
-.
.
. -.
-.
.-....... .. ...-- -..-.-.-...
-..
.. .... ...- ---.-.
-.
..
-.. ..
50
100
150
Tame~s)
200
250
300
(a) Bath Temp T=19C Two Tests Overlayed
6
2 -
23 -
. ...
. .. .... .. -.-.-.-.-.-.-.
...
---. ..
...
- . -.
. --..
-..
.
-..
- -..-.
--
--
-.
. ...... -.--
...
- --.
-
-
..-
.- .....-.
21
Tmnu(s)
(b) Bath Temp T=21C, Two Tests Overlayed
Figure 3-2: Temperature Measurements in Thermal Baths
each constrained by two holes so that they are completely vertical. The rods have
to be as close to vertical as possible so when the wedge is released their horizontal
force on it is minimized. After letting the system rest for two hours, long enough
for ambient flows to die out, we release the wedge from the cage by slowly bringing
the cage up via a lead screw system, which allows very slow and constant speeds to
be achieved. After we release the wedge we wait a few minutes so that we can track
any velocity resulting from the release. Finally we turn on the heater and track the
wedge's propulsion by taking pictures every ten seconds. In order to determine the
wedge speed from the images we use a MATLAB script that tracks two corners of the
wedge for each picture. We repeated the experiments several times.
23
Water at density 1000 kg/mA3
H=8cm
L=26cm
h=10cm
ted surface
H=30cm
Water at density 1070 kg/MA3
Figure 3-3: Experimental Set Up
3.1
Experimental Results
Figures 3-3(a) and (b) display the experimental results obtained from two consecutive
runs. The two blue lines are the positions of the corners of the wedge over time and
the red line is the center point position over time. In both cases the wedge moves
from left to right.
From these positions with time we determined the wedge velocity using a MATLAB script. The plots of tip position verses time reflect a few important aspects of
the experiment. It can clearly be seen in figure 3 - 4(b) that there are two distinct
sections of the wedge's motion. The first is a result of the cage kicking the wedge
when it is released. This motion is undesirable as ideally we would achieve a perfectly stable release, however due to the low viscosity of water and the limitations
of our precise release system we were unable to achieve a perfect release. The latter
motion is a combination of this kick velocity as well as the propulsion vector from
the heating. Figures 3 - 5(a) and (b) show the horizontal distance traveled verses
time plots for each run and display the same features. They also reflect the fact that
the kick velocity is significantly less than the propulsion velocity, so even though it is
undesirable it is not the dominant effect.
24
To determine the propulsion speed we subtracted the kick velocity vector from
the final velocity vector. In order to justify this approach we needed to confirm that
the motion is solely a result of the kick and the heating, and thus the magnitude
of the ambient currents needed to be measured.
We did this by releasing small
spheres with a diameter of 1 inch and density 1040 kg/m
3
into the two layer system.
We submerged the spheres, allowed them to settle vertically, and then tracked their
motion over time. By not releasing the spheres with the cage but instead letting them
settle, which they did more easily than the wedge because of their smaller size, we
eliminated the kick force and thus the only effect we were observering was the ambient
current at the interface between the two layers. We repeated the test, allowing the
spheres to start at different locations in the system so as to accurately characterize
the ambient flows throughout the plane, and observed sphere velocities of 0.043 mm/s
and 0.048 mm/s. Both speeds are an order of mangitude smaller than the propulsion
velocities observed, making our assumptions for determining the propulsion velocity
valid.
In the first run the final velocity was 0.81 mm/s, with an initial kick velocity of
0.16 mm/s, giving a propulsion velocity of 0.66 mm/s. In the second run the total
velocity was 0.68 mm/s, with an initial kick of 0.12 mm/s, giving a propulsion velocity
of 0.57 mm/s. Thus we observed a propulsion velocity of 0.61 ± 0.04 mm/s.
3.1.1
Discussion
There are several aspects of the experiment that may account for the discrepancy
between the predicted propulsion speed of 1.43 mm/s and the experimental result of
0.61 ± 0.04 mm/s.
First, the temperature measurement method is not ideal. The device we used has
large sensors that make the measurements inaccurate. Because there are large temperature gradients at very small distances from the heated surface and the boundary
layer is on the order of millimeters in thickness while the temperature size of the
sensors are also on the order of millimeters we cannot guarantee an accurate surface
temperature measurement.
25
Front tip track
I Ann
1700
1600
1500
...
- .-. ......
-......
..
--... ..
......
--------..
....
.. ..
1400
1300
-
1200
1100
--.. - -- ...
.......-....
-...
. --. .... - .. --.
-..-.
...
---
-
-.....
-----
--.
.....
1000
1200
1600
1400
1800
2000
2200
2400
2600
2800
3000
3200
(a) Test 1 Corner Pixel Location, Wedge Motion Left to
Right
Front tip track
1800
1700
. .
..-.-.-.-.-.-...... ...
..
..
....
--. ...-.
.
......-....-.-.
.
1600
- - -..----.
1500
-- .....
1400
1300
-. -..-..-..--
-
. . . .. . . .
.
- . ....
...
--..
-..
...
-
...
. . . .. . . .
.........
.....
...
.... - --..
...-.
-.--.-..-.-.-.....--.
-............
1200
1100
1000
o
1000
1500
2500
2000
30
350
4000
(b) Test 2 Corner Pixel Location, Wedge Motion Left to
Right
Figure 3-4: Wedge Corner Position Over Time
Also, in order to get the closest possible measurement of the surface temperature
we mounted the sensors to the heated surface with tape. This can affect the heat flow
from the wall and may insulate the water near the temperature sensors, resulting in a
greater measured temperature difference than what actually occurs in the lab system.
For these reasons the temperature measurements must be improved by measuring
the surface temperature in the actual experimental setup in order to decrease the
difference between our experiments and model, especially since we predict the effect
varies with the temperature difference to the 3/4 power.
An interesting factor to look at is the efficiency of the propulsion mechanism. We
computed this by comparing the power input to the system versus the power of the
26
0.14 - ---
--
0 .12 -- -
- -
--
-
- - - .
0.0
-- -.-.- -.-.-
-
-
-
--
- --. .
-.---
-.-.-
-- .. -
-
-. . - - -. - .
0.1 - -. -.-. ---. -.
-
-
-
-
--
-- - --
-
Kik Fit
---
--
--
-
-
-
---
-
-
.
.-
8
0 .06 --- -
0.04
0 .02 -.-
--
-
-
-
.- . . - - -. -.. ..
-
-
--
- -
-- - -
--- -
- -- -
- --
- -
-
-
- --
-
.- - -
-
-
-
0.
100
50
0
150
250
i0
300
400
350
Tim(s)
(a) Test 1
0.2.
0.20
S0.15
--
-
- -
-- -
- -
- -
-
-
-
--
--
3
0.06
0
--
- ----
.
100
20
300
400
00
500
700
800
ru(Ts)
(b) Test 2
Figure 3-5: Wedge Velocity Verses Time
propulsion process. The power out can be calculated as Pat = F,,.PVwedge, while the
power in can be related to the heat transfer process of convection, Pi = hAwedgeAT,
where h is the heat transfer coefficient of the configuation. The heat transfer coefficient for this configuation is related to the Rayleigh number, assuming the propulsion
speeds are small enough so that the heat transfer is similar to natural convection
rather than forced convection, RaL =
sic
ITL
3
where L is the length of the
heated face, v is the dynamic viscosity of water, a the thermal diffusivity, and
#
the thermal expansion coefficient. By using similiarity to the vertical case, justified
earlier, the heat transfer coefficient can be determined from Nusselt correlations [2].
The Nusselt number is defined as Nu =
",
the ratio of conductive to convective
heat transfer perpendicular to a boundary, where h is the heat transfer coefficient, L
27
the characteristic length scale, and k the conductivity of the fluid. The result of the
calculations is that for our configuration h = 106 W/m 2 K. The resulting efficiency
of the propulsion is 9.35 - 10-8%, with an input power of 2.54W and an output power
of 9.35 - 10-loW, a strikingly inefficient process. However, it is worth noting how this
efficiency scales with increasing temperature difference. As the propulsion speeds are
expected to scale with the temperature difference to the 3/4 power, while the heat
input scales with the temperature difference to the 1/3 power, the efficiency scales
with the temperature difference to the 5/12.
28
Chapter 4
Conclusions
A wedge with a heated surface at a temperature 4'C greater than the ambient fluid
propels itself with a speed of 0.613±0.042 mm/s. Our current theoretical and numerical modeling predict a propulsion speed of 1.43 mm/s, within an order of magnitude
of our experimental results. Also, our model captures the dominant forces of propulsion, namely the counteracting pressure and shear forces resulting from the buoyancy
driven flow.
Also, although this propulsion may be inefficient, it does provide a means of
"silent" propulsion which is desirable in certain applications. Submarines and other
underwater vehicles can be detected by their motor noise, which occurs at distinct frequencies. However this propulsion process does not require a motor and the resulting
"silent" motion may provide an alternative driving system in close quarters.
For further work we will also measure the effect in a fluid of different viscosity,
which we expect to have several implications. First, it will enable us to confirm the
anticipated scaling of the propulsion with viscosity and temperature difference (since
viscosity also plays a role in the heat transfer and thus temperature difference obtained). The increased viscosity should also help dampen out the initial kick velocity,
as we have been able to achieve more stable releases with greater viscosity fluids.
29
30
Bibliography
[1] M. Allshouse, M. Barad, and T. Peacock. Propulsion generated by diffusion-drive
flow. Nature Physics, 6:516-519, 2010.
[2] F. Incropera and D. DeWitt. Fundamentals of Heat and Mass Transfer. New
York: Wiley, 2000.
[3] H. Schlichting. Boundary Layer Theory. McGraw-Hill Book Company Inc., 1960.
[4] A. Umemura and C. Law. Natural-convection boundary-layer flow over a heated
plate with arbitrary inclination. J. Fluid Mech., 219:571, 1990.
31