Hindawi Publishing Corporation Abstract and Applied Analysis Volume 2008, Article ID 432341, pages
advertisement

Hindawi Publishing Corporation
Abstract and Applied Analysis
Volume 2008, Article ID 432341, 14 pages
doi:10.1155/2008/432341
Research Article
Dynamics of Cohen-Grossberg Neural Networks
with Mixed Delays and Impulses
Xinsong Yang,1, 2 Chuangxia Huang,1, 3 Defei Zhang,2 and Yao Long2
1
Department of Mathematics, Southeast University, Nanjing 210096, China
Department of Mathematics, Honghe University, Mengzi, Yunnan 661100, China
3
Department of Mathematics, College of Mathematics and Computing Science,
Changsha University of Science and Technology, Changsha, Hunan 410076, China
2
Correspondence should be addressed to Chuangxia Huang, cxiahuang@126.com
Received 8 September 2008; Accepted 5 November 2008
Recommended by Ülle Kotta
Impulsive Cohen-Grossberg neural networks with bounded and unbounded delays i.e., mixed
delays are investigated. By using the Leray-Schauder fixed point theorem, differential inequality
techniques, and constructing suitable Lyapunov functional, several new sufficient conditions on
the existence and global exponential stability of periodic solution for the system are obtained,
which improves some of the known results. An example and its numerical simulations are
employed to illustrate our feasible results.
Copyright q 2008 Xinsong Yang et al. This is an open access article distributed under the Creative
Commons Attribution License, which permits unrestricted use, distribution, and reproduction in
any medium, provided the original work is properly cited.
1. Introduction
In the recent years, dynamics of the Cohen-Grossberg neural networks CGNNs 1 has
been extensively studied because of their immense potentials of application perspective
in different areas such as pattern recognition, parallel computing, associative memory,
combinational optimization, and signal and image processing 2–6. The authors of 7–11
have studied the stability of equilibrium point or periodic solution of CGNNs with timevarying delays due to the transmission delays during the communication between neurons
which will affect the dynamical behavior of neural networks. Considering the distant past
also has influence on the recent behavior of the state, the authors of 12 investigated the
stability of equilibrium point for CGNNs with continuously distributed delays. Impulsive
effects are also likely to exist in the neural networks, that is, the state of the networks is subject
to instantaneous perturbations and experiences abrupt change at certain moments. Authors
of 13–16 have studied the stability of equilibrium point for impulsive delay CGNNs.
However, the activation functions of CGNNs in 12–16 are bounded, and the restrictions
on impulses in 13, 17 are very strong, which limit CGNNs’ applications 7.
2
Abstract and Applied Analysis
In theory and applications, global stability of periodic solution of CGNNs is of great
importance since the global stability of equilibrium points can be considered as a special
case of periodic solution with random period. Moreover, CGNNs model is one of the most
popular and typical neural network models. Some other models, such as Hopfield-type
neural networks, cellular neural networks, and bidirectional associative memory neural
networks, are special cases of the model 14. To our best knowledge, few authors have
considered the existence and global exponential stability of periodic solutions for CGNNs
with mixed delays and impulses. Therefore, it is necessary to consider the existence and
global exponential stability of periodic solution for impulsive CGNNs with mixed delays.
The main methods used in this paper are Leray-Schauder’s fixed point theorem, differential inequality techniques, and Lyapunov functional. Several new sufficient conditions are
obtained for the existence and global exponential stability of periodic solution for impulsive
CGNNs with mixed delays. Moreover, we discharge some restrictive conditions on the
activation functions of the neurons, such as boundedness, monotonicity, and differentiable,
we offer the precise convergence index, and give the weak conditions on impulses.
The rest of this paper is organized as follows. In Section 2, we introduce some notations
and definitions and state some preliminary results needed in later sections. We then study, in
Section 3, the existence of periodic solutions of impulsive CGNNs with mixed delays by using
Leray-Schauder’s fixed point theorem. In Section 4, with the help of Lyapunov functional, we
will derive sufficient conditions for the global exponential stability of the periodic solution. At
last, an example and its numerical simulations are employed to illustrate the feasible results
of this paper.
2. Preliminaries
Consider the following CGNNs with mixed delays and impulses:
ui t
n bij tfj uj t − τij t
−ai ui t bi ui t −
j1
cij t
Δui tk ui tk − ui t−k γik ui tk ,
t
−∞
kij t − sgj uj s ds Ii t ,
t/
tk ,
i 1, 2, . . . , n,
2.1
where Δui tk i 1, 2, . . . , n are the impulses at moments tk , ui t is left continuous at time
tk , and the right limit exists at tk , that is, ui tk ui t−k and ui tk exist and 0 < t1 < t2 < · · · is
a strictly increasing sequence such that limk → ∞ tk ∞; ui t is the state of neuron; ai ui t
and bi ui t represent an amplification function at time t and an appropriately behaved
function at time t, respectively; B bij tn×n and C cij tn×n are connection matrices;
It I1 t, I2 t, . . . , In tT is the input function; and gu g1 u1 , g2 u2 , . . . , gn un T
are the activation functions of the neurons.
Throughout this paper, we assume that
H1 bij t, cij t, τij t ≥ 0, Ii t are continuous ω-periodic functions, ω > 0 is a constant,
i, j 1, 2, . . . , n;
H2 ai u is continuous and there exist positive constants a i and ai such that 0 < a i ≤
ai u ≤ ai , u ∈ R, i 1, 2, . . . , n;
Xinsong Yang et al.
3
H3 there is a positive constant li such that bi u ≥ li , bi u denotes the derivative of
bi u, u ∈ R, and bi 0 0, i 1, 2, . . . , n;
H4 {γik } and {tk } are ω-periodic sequence, that is, there exists a positive constant p
such that tkp tk ω, γikp γik , i 1, 2, . . . , n;
f
g
H5 fj , gj ∈ CR, R, there are positive constants Lj > 0, Lj > 0, such that |gj x−gj y| ≤
g
f
Lj |x − y|, |fj x − fj y| ≤ Lj |x − y| ∀x, y ∈ R, j 1, 2, . . . , n;
H6 the delay kernels kij : 0, ∞ → R are continuous, integrable and there exist
positive constants βij such that
∞
kij s
ds ≤ βij ,
i, j 1, 2, . . . , n;
2.2
0
H7 n
j1 aj
max sup
bij t
Lf cij t
Lg βij j
j
qi
1≤i≤n 0≤t≤ω
max θ 1≤i≤n
ai
a i 1 − e−qi ω
θ < 1,
2.3
p
bik < 1,
k1
where qi a i li ;
H8 there exists a constant α0 > 0 such that
∞
kij s
eα0 s ds < ∞,
i, j 1, 2, . . . , n.
2.4
0
From H2 , the antiderivative of 1/ai ui exists. We choose an antiderivative hi ui of
1/ai ui that satisfies hi 0 0. Obviously, d/dui hi ui 1/ai ui . By ai ui > 0, we obtain
that hi ui is strictly monotone increasing about ui . In view of derivative theorem for inverse
−1
function, the inverse function h−1
i ui of hi ui is differential and d/dui hi ui ai ui . By
−1
H3 , composition function bi hi z is differential. Denote xi t hi ui t, it is easy to see
that xi t ui t/ai ui t and ui t h−1
i xi t. Substituting these equalities into system
2.1, we get
xi t −bi h−1
xi t
i
n bij tfj h−1
xj t − τij t
j
j1
t
cij t
kij t −
xj s ds − Ii t, t / tk ,
−∞
. Δxi tk hi 1 γik h−1
xi tk
− xi tk ri xi tk , i 1, 2, . . . , n,
i
sgj h−1
j
2.5
4
Abstract and Applied Analysis
which can be rewritten as
n bij tfj h−1
xi t −di xi t xi t xj t − τij t
j
j1
cij t
Δxi tk ri xi tk ,
t
−∞
kij t −
sgj h−1
j
xj s ds − Ii t,
t/
tk ,
2.6
i 1, 2, . . . , n,
−1
−1
where di xi t bi h−1
i z |zξi , bi hi z |zξi denote the derivative of bi hi z at point
z ξi , z ∈ R, ξi is between 0 and xi t.
The existence and global exponential stability of periodic solution for system 2.1 are
equivalent to the existence and global exponential stability of periodic solution for system
2.5 or 2.6. So, we investigate the the existence and global exponential stability of periodic
solution for system 2.6.
From the definition of h−1
i u, using Lagrange mean value theorem, one gets
−1
h x − h−1 y
h−1 ξx − y
≤ ai |x − y|,
i
i
i
∀x, y ∈ R,
2.7
where ξ is between x and y. Moreover, we have
ri xi tk ≤ 1 1 γik h−1 xi tk − ui tk i
a
i γik ai h−1 xi tk ≤ γik xi tk .
i
ai
ai
2.8
For convenience, we denote τ max{τij t : t ∈ 0, ω, i, j 1, 2, . . . , n}, x x1 , x2 , . . . , xn T to be a column vector, in which the symbol T denotes the transpose of a
vector.
Definition 2.1. A function x ∈ R, Rn is said to be a solution of 2.6 if the following conditions
are satisfied.
i xt is absolutely continuous on each tk , tk1 , k ∈ N.
ii For each k ∈ N, xtk and xt−k exist and xtk xt−k .
iii xt satisfies 2.6 for almost everywhere and at impulsive points, tk may have
discontinuity of the first kind.
The initial condition φ φ1 , . . . , φn T of 2.6 is of the form
xi s φi s,
s ∈ −∞, 0, i 1, . . . , n,
where φi s, i 1, 2, . . . , n are continuous functions.
2.9
Xinsong Yang et al.
5
Definition 2.2. Let x∗ t be an ω-periodic solution of 2.6 with initial value φ∗ φ1∗ , . . . , φn∗ T ∈ C−∞, 0; Rn . If there exist constants α > 0, M ≥ 1 such that for every
solution xt of 2.6 with initial value φ ∈ C−∞, 0; Rn ,
xi t − x∗ t
≤ Mφ − φ∗ e−αt ,
i
∀t > 0, i 1, 2, . . . , n,
2.10
where φ − φ∗ sups≤0 max1≤i≤n |φi s − φi∗ s|. Then, x∗ t is said to be globally exponentially
stable.
Lemma 2.3 Leray-Schauder. Let E be a Banach space, and let the operator A : E → E be
completely continuous. If the set {
x
| x ∈ E, x λAx, 0 < λ < 1} is bounded, then A has a
fixed point in T , where
T x | x ∈ E, x
≤ R ,
R sup x
| x λAx, 0 < λ < 1 .
2.11
3. Existence of periodic solutions
Lemma 3.1. Suppose that (H1 –(H5 hold and let xt be an ω-periodic solution of system 2.6.
Then,
xi t ω
0
wix t, s
n
bij sfj h−1
xj s − τij s
j
j1
cij s
s
p
wix t, tk ri xi tk ,
−∞
kij s −
vgj h−1
j
xj v dv − Ii s ds
3.1
t ∈ 0, ω, i 1, 2, . . . , n,
k1
where
wix t, s
1−e
−
ω
0
1
di xi vdv
t
e− s di xi vdv,
ω
s
e− 0 di xi vdv− t di xi vdv,
0 ≤ s ≤ t ≤ ω,
0 ≤ t < s ≤ ω.
3.2
Proof. Let tq ≤ t < tq1 , q ≤ p. From the first expression of 2.6, we have
xi te
t
0 di xi sds
n bij tfj h−1
xj t − τij t
j
j1
cij t
t
−∞
kij t −
sgj h−1
j
t
xj s ds − Ii t e 0 di xi sds .
3.3
6
Abstract and Applied Analysis
Integrating 3.3 on intervals 0, t−1 , t1 , t−2 , . . . , tq , t and adding all of them, by the second
formula of 2.6, we have
xi t e−
t
0
di xi sds
q
t
− d x sds e tk i i
ri xi tk
xi 0 k1
t n bij sfj h−1
xj s − τij s
j
0
j1
cij s
s
−∞
kij s −
3.4
vgj h−1
j
xj v dv − Ii s e−
t
s
di xi vdv
ds.
Since xi ω xi 0, from 3.4, we obtain
xi 0 1−e
−
ω
0
p
1
di xi vdv
e
−
ω
tk
di xi sds
ri xi tk
k1
ω n bij sfj h−1
xj s − τij s
j
0
j1
cij s
×e
−
ω
s
s
−∞
kij s −
vgj h−1
j
3.5
xj v dv − Ii s
di xi vdv
ds .
Substituting 3.5 into 3.4, we obtain 3.1. This completes the proof.
In order to use Lemma 2.3, we take P CJ, Rn {xt | x : J 0, ω → Rn as
−
piecewise continuous periodic solution at t / tk , and xtk , xtk xtk exist at t tk , k 1, 2, . . . , p}. Then, P CJ, Rn is a Banach space with the norm
x
max xi 0 ,
1≤i≤n
xi sup xi t
,
0
i 1, 2, . . . , n.
3.6
0≤t≤ω
Set a mapping Φ : P CJ, Rn → P CJ, Rn by setting
Φxt xt,
t ∈ J 0, ω,
3.7
where
Φxi t ω
0
wix t, s
n
xj s − τij s
bij sfj h−1
j
j1
cij s
p
k1
s
wix t, tk ri xi tk .
−∞
kij s −
vgj h−1
j
xj v dv − Ii s ds
3.8
Xinsong Yang et al.
7
It is easy to know the fact that the existence of ω-periodic solution of 2.6 is equivalent
to the existence of fixed point of the mapping Φ in P CJ, Rn .
Lemma 3.2. Suppose that (H1 –(H7 hold. Then, Φ : P CJ, Rn → P CJ, Rn is completely
continuous.
Proof. First, we show that Φ : P CJ, Rn → P CJ, Rn is continuous. For any ε > 0, we take
p
0 < δ < ε/max1≤i≤n {θ k1 ηik /1 − e−qi ω }, where ηik ai /a i |1 γik | 1. Then, for all
x, y ∈ P CJ, Rn and x − y
< δ, we have
ω
Φx − Φy
max sup wix t, s
1≤i≤n 0≤t≤ω 0
n − fj h−1
bij s fj h−1
×
xj s − τij s
yj s − τij s
j
j
j1
s
−1 kij s−v gj h−1
v
−g
v
dv
ds
x
h
y
j
j
j
j
j
−∞
p
x
wi t, tk ri xi tk − ri yi tk k1
ω
p
ηik
≤ max sup
x − y
wix t, sqi θ ds 1≤i≤n 0≤t≤ω
1
−
e−qi ω
0
k1
p
η
k1 ik
< max θ δ < ε.
1≤i≤n
1 − e−qi ω
3.9
cij s
Hence, Φ is continuous.
Next, we show Φ maps bounded set into bounded set. For any x ∈ P CJ, Rn with
x
< D, where D is some positive constant, we have
ω
Φx
max sup wix t, s
1≤i≤n 0≤t≤ω 0
n
×
bij sfj h−1
xj s − τij s
j
j1
cij s
s
−∞
kij s −
vgj h−1
j
p
x
wi t, tk ri xi tk k1
p
ai
< max θ γik D
−q
ω
1≤i≤n
a i 1 − e i k1
n
1 max
bij fj 0
cij βij gj 0
I i ,
1≤i≤n qi
j1
xj v dv − Ii s ds
3.10
8
Abstract and Applied Analysis
where bij maxt∈0,ω |bij t|, cij maxt∈0,ω |cij t|, I i maxt∈0,ω |Ii t|. Equation 3.10
implies that Φx
is uniformly bounded for any x
< D. Hence, {Φx | x ∈ P CJ, Rn } is a
family of uniformly bounded and equicontinuous functions on R. By using the Arzela-Ascoli
theorem, Φ : P CJ, Rn → P CJ, Rn is compact. Therefore, Φ : P CJ, Rn → P CJ, Rn is
completely continuous. This completes the proof.
Theorem 3.3. Suppose that (H1 –(H7 hold. Then, system 2.6 has an ω-periodic solution.
Proof. Let x ∈ P CJ, Rn , t ∈ J. We consider the operator equation
x λΦx,
λ ∈ 0, 1.
3.11
If x is a solution of 3.11, for t ∈ J, we obtain
p
ai
x
≤ Φx
≤ max θ γik x
1≤i≤n
a i 1 − e−qi ω k1
n
1 max
bij fj 0
cij βij gj 0
I i ,
1≤i≤n qi
j1
where this and max1≤i≤n {θ ai /a i 1 − e−qi ω x
≤
p
k1
|γik |} < 1 imply that
n j1 bij fj 0 cij βij gj 0 I i
R.
p γ 1 − max1≤i≤n θ ai /a i 1 − e−qi ω
k1 ik
max1≤i≤n
3.12
1/qi
3.13
This shows that x
of 3.11 is bounded, which is independent of λ ∈ 0, 1. In view of
Lemma 2.3, we obtain that Φ has a fixed point. Hence, system 2.6 has one ω-periodic
solution with x
≤ R. This completes the proof.
4. Global exponential stability of periodic solution
In this section, we will construct some suitable Lyapunov functionals to derive sufficient
conditions which ensure that 2.6 has a unique ω-periodic solution, and all solutions of 2.6
exponentially converge to its unique ω-periodic solution.
Theorem 4.1. Assume that (H1 –(H8 hold and
H9 ln Mk /tk − tk−1 ≤ η < α, where Mk max1≤i≤n {ai /a i |1 γik |, 1}, η is a positive
constant, α is given in the proof of this theorem, t0 tp − ω.
Then, system 2.6 has exactly one ω-periodic solution, which is globally exponentially stable with the
convergence index α − η.
Proof. By Theorem 3.3, there exists an ω-periodic solution x∗ t x1∗ t, x2∗ t, . . . , xn∗ tT of
2.6 with initial value φ∗ φ1∗ , . . . , φn∗ T . Suppose that xt is an arbitrary solution of system
Xinsong Yang et al.
9
2.6 with initial value φ φ1 , . . . , φn T . Set zt z1 t, z2 t, . . . , zn tT xt − x∗ t, then,
from system 2.5, we have
∗ zi t − bi h−1
xi t − bi h−1
xi t
i
i
n
∗
− fj h−1
bij t fj h−1
xj t − τij t
xj t − τij t j
j
j1
t
−1 −1 ∗ cij t
kij t − s gj hj xj s − gj hj xj s ds , t /
tk ,
−∞
−1 −1 ∗ zi tk hi 1 bik hi xi tk
− hi 1 bik hi xi tk
, i 1, 2, . . . , n.
4.1
By θ < 1, we have
n
f g aj bij t
Lj cij t
Lj βij < 0,
−qi i 1, 2, . . . , n.
4.2
j1
Set
n
f λτ g ∞ λs
kij s e ds ,
hi λ λ − qi aj bij t Lj e cij t Lj
i 1, 2, . . . , n.
4.3
0
j1
Clearly, hi λ, i 1, 2, . . . , n are continuous functions on R. Since
hi 0 ≤ −qi n
f g aj bij t
Lj cij t
Lj βij < 0,
j1
n
f
g ∞ dhi λ
kij s
seλs ds > 0,
1 aj τ bij t
Lj eλτ cij t
Lj
dλ
0
j1
4.4
and hi ∞ ∞, hence hi λ, i 1, 2, . . . , n are strictly monotone increasing functions.
Therefore, for any i ∈ {1, 2, . . . , n} and t ≥ 0, there is a unique λt such that
λt − qi n
f
g ∞ kij s
eλts ds 0.
aj bij t
Lj eλtτ cij t
Lj
j1
4.5
0
f
g ∞
Let λ∗i inft≥0 {λt | λt − qi nj1 aj |bij t|Lj eλtτ |cij t|Lj 0 |kij s|eλts ds 0}.
Obviously, λ∗i ≥ 0, i 1, 2, . . . , n. Now, we will prove that λ∗i > 0, i 1, 2, . . . , n. Suppose this
is not true, from 4.2, there exists a positive constant η such that
inf
t≥0, 1≤i≤n
f g qi − nj1 aj bij t
Lj cij t
Lj βij
f g ≥ η.
1 nj1 aj 1.5τ bij t
Lj cij t
Lj βij
4.6
10
Abstract and Applied Analysis
Pick small ε > 0, then there exists ti ≥ 0 such that
0<
λ∗i
i
t < ε < η,
∞
kij s
eεs ds < βij η.
4.7
0
Let us recall the inequality ex < 1 1.5x for sufficiently small x > 0, then, we obtain
0
λ∗i
n
i f λ∗ ti τ i g ∞ i
kij s
eλ∗i ti s ds
i
cij t Lj
t − qi aj bij t Lj e
0
j1
< η − qi n
g f
aj bij ti Lj 1 1.5ητ cij ti Lj βij η
j1
n
f g ≤ −qi aj bij ti Lj cij ti Lj βij
4.8
j1
f g qi − nj1 aj bij ti Lj cij ti Lj βij
f g 1 nj1 aj 1.5τ bij ti Lj cij ti Lj βij
n
i f i g 0,
× 1 aj 1.5τ bij t L cij t L βij
j
j
j1
which is a contradiction, and hence, λ∗i > 0, i 1, 2, . . . , n.
Let α min{λ∗1 , λ∗2 , . . . , λ∗n }. Obviously, for all t ≥ 0, we have
hi α α − qi n
f
g ∞ kij s
eαs ds ≤ 0,
aj bij t
Lj eατ cij t
Lj
i 1, 2, . . . , n. 4.9
0
j1
It is obvious that
zi t
≤ φ − φ∗ ≤ φ − φ∗ e−αt ,
for t ∈ −∞, 0, i 1, 2, . . . , n,
4.10
where φ − φ∗ is defined as that in Definition 2.2.
Define the Lyapunov functional V V1 , V2 , . . . , Vn T by Vi eαt |zi t|, i 1, 2, . . . , n.
In view of 4.1, for t / tk , k 1, 2, . . . , we obtain
n d Vi t
αt
bij t
Lf aj zj t − τij t ≤e
α − qi zi t
j
dt
j1
t g kij t − s
L aj zj s
ds
cij t
−∞
j
n
f
≤ α − qi Vi t aj bij t
eατ Lj Vj t − τij t
j1
g
cij t
L
j
t
−∞
kij t − s
eαt−s Vj sds .
4.11
Xinsong Yang et al.
11
We claim that
Vi t zi t
eαt ≤ φ − φ∗ ,
i 1, 2, . . . , n, ∀t ∈ 0, t1 .
4.12
Contrarily, there must exist i0 ∈ {1, 2, . . . , n} and 0 < t < t1 such that
Vi0 t φ − φ∗ ,
d Vi0 t
> 0,
dt
Vi t ≤ φ − φ∗ ,
∀t ∈ −∞, t, i 1, 2, . . . , n. 4.13
Together with 4.11 and 4.13, we obtain
d Vi0 t dt n
αs
ατ f g ∞ ∗
ki j s
e ds .
≤ φ − φ α − qi0 aj bi0 j t e Lj ci0 j t Lj
0
0<
4.14
0
j1
Hence,
n
ατ f g ∞ ki j s
eαs ds ,
0 < α − qi0 aj bi0 j t e Lj ci0 j t Lj
0
4.15
0
j1
which contradicts 4.9. Hence, 4.12 holds. It follows that
zi t
≤ φ − φ∗ e−αt ,
∀t ∈ 0, t1 , i 1, 2, . . . , n.
4.16
When t t1 , from the second expression of 4.1, we have
ai zi t ≤ 1 γi1 zi t1 ≤ M1 lim zi t1 1
ai
t → t−1
≤ M1 φ − φ∗ e−αt1 , i 1, 2, . . . , n.
4.17
Similar to the steps of 4.9–4.16, we can also prove that
zi t
≤ M1 φ − φ∗ e−αt ,
t ∈ t1 , t2 , i 1, 2, . . . , n.
4.18
When t t2 , again, from the second expression of 4.1, we have
ai zi t ≤ 1 bi2 zi t2 ≤ M1 M2 φ − φ∗ e−αt2 ,
2
ai
i 1, 2, . . . , n.
4.19
By repeating the same procedure, we can deduce the following general result:
zi t
≤ M1 M2 · · · Mk φ − φ∗ e−αt ,
t ∈ tk , tk1 , i 1, 2, . . . , n.
4.20
12
Abstract and Applied Analysis
By H9 , we have Mk ≤ eηtk −tk−1 , which implies that
t ∈ tk , tk1 .
4.21
∀t > 0, i 1, 2, . . . , n.
4.22
M1 M2 · · · Mk ≤ eηt1 −t0 eηt2 −t1 , . . . , eηtk −tk−1 ≤ eηω−tp eηt ,
So, in light of 4.20 and 4.21, we have
xi t − x∗ t
zi t
≤ eηω−tp φ − φ∗ e−α−ηt ,
i
In view of Definition 2.2, the ω-periodic solution x∗ t of system 2.6 is globally
exponentially stable with the convergence index α − η. This completes the proof.
Remark 4.2. Note that we have dropped the restriction: the activation functions are bounded
and |1 γik | ≤ 1, which is indispensable in 13, 17.
Remark 4.3. To the best of our knowledge, most of the existing research papers only give
the existence of the convergence index, while we offer the precise convergence index in
Theorem 4.1.
5. Application
In this section, we give an example to illustrate that our results are feasible. Consider the
following Cohen-Grossberg neural networks with mixed delays and impulses:
ui t
2 −ai ui t bi ui t −
bij tfj uj t − τij t
j1
cij t
Δui tk ui tk − ui t−k 0.02ui tk ,
t
−∞
kij t − sgj uj s ds Ii t ,
t
/ tk ,
i 1, 2, tk k − 0.5, k 1, 2, . . . ,
5.1
where f1 u f2 u g1 u g2 u |u 1|, a1 u 3 sin u, a2 u 3 − cos u, b1 u 5u sin u, b2 u 5u − cos u, Ii t sin πt, τij t cos πt2 , kij sint − se−2t−s , i, j 1, 2:
⎛
b11
b21
1
πt
⎜ sin
6
2
b12
⎜
⎜
⎝1
b22
πt
sin
10
2
f
⎞
1
πt
cos ⎟
6
2 ⎟
⎟,
1
πt ⎠
cos
8
2
f
g
⎞
1
πt 1
πt
cos
sin
⎜
2
6
2 ⎟
c12
⎟
⎜6
⎜
⎟.
⎝1
c22
πt 1
πt ⎠
sin
cos
10
2 12
2
⎛
c11
c21
5.2
g
We have ω 4, L1 L2 L1 L2 1, a1 a2 4, a 1 a 2 2, l1 l2 4, βij 1/2:
θ ≈ 0.1863 < 1,
p
ai
bik max θ −q
ω
i
1≤i≤2
ai 1 − e
k1
≈ 0.3463 < 1,
5.3
Xinsong Yang et al.
13
−3.9
−4.9
−4.1
Solution u
−5.3
−4.5
−5.5
−4.7
−4.9
1
−5.1
−4.3
h
1.5
−5.7
0 0.5 1 1.5 2 2.5 3 3.5 4
0.5
0
−0.5
−1
−1.5
0 1 2 3 4 5 6 7 8
0
0.2 0.4
Time t
0.6
0.8
1
0.3
0.5
Time t
u1
u2
1
1
0.8
0.8
0.6
0.6
0.4
0.2
0
−0.2
−0.4
b
c
8
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
−0.1
−0.3 −0.1
0.4
u2
Solution u
Solution u
a
0.2
0
−0.2
0
4
8
12
16
−0.4
20
Time t
0
4
12
16
20
Time t
u1
e
u2
d
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
−0.1
−0.3 −0.1
0.1
f
0.1
0.3
0.5
u1
g
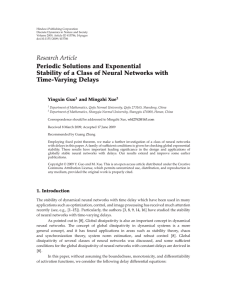
Figure 1: a The trajectory of h1 λ. b The trajectory of h2 λ. c Numeric simulation of u1 , u2 . d
Numeric simulation of u1 , u2 without impulses. e Numeric simulation of u1 , u2 with impulses. f
Numeric simulation of u1 , u2 without impulses. g Numeric simulation of u1 , u2 with impulses.
ln Mk /tk − tk−1 ln 2.04 0.7129 < 1. Submitting λ 1 into 4.9, we have h1 λ < −3.9 < 0,
h2 λ < −4.9 < 0, see Figures 1a and 1b. This implies that ln 2.04 < 1 < α. Hence, all
the conditions needed in Theorem 4.1 are satisfied. Therefore, system 5.1 has a unique 4periodic solution, which is globally exponentially stable see Figures 1c–1g.
Remark 5.1. System 5.1 is a simple CGNNs with time-varying coefficients, mixed
delays, and impulses. In system 5.1, the activation functions are all unbounded and
14
Abstract and Applied Analysis
|1 bik | 1.02 > 1, i 1, 2. Thus, none of the results in 13–17 can be applied to 5.1. This
implies that the results of this paper are new and complement previously known results.
Acknowledgments
The authors would like to thank the reviewers for their valuable comments and constructive
suggestions which considerably improve the presentation of this paper. This work was
supported in part by the China Postdoctoral Science Foundation 20070410300, 200801336,
the Foundation of Chinese Society for Electrical Engineering, the Hunan Provincial Natural
Science Foundation of China 07JJ4001, the Scientific Research Fund of Yunnan Provincial
Education Department 07Y10085, the Key Scientific Research Fund of Yunnan Provincial
Education Department 5Z0071A, and the Scientific Research Fund of Honghe University
XSS07001.
References
1 M. A. Cohen and S. Grossberg, “Absolute stability of global pattern formation and parallel memory
storage by competitive neural networks,” IEEE Transactions on Systems, Man, and Cybernetics, vol. 13,
no. 5, pp. 815–826, 1983.
2 C. Huang and L. Huang, “Dynamics of a class of Cohen-Grossberg neural networks with timevarying delays,” Nonlinear Analysis: Real World Applications, vol. 8, no. 1, pp. 40–52, 2007.
3 T. Chen and L. Rong, “Robust global exponential stability of Cohen-Grossberg neural networks with
time delays,” IEEE Transactions on Neural Networks, vol. 15, no. 1, pp. 203–206, 2004.
4 J. Cao and J. Liang, “Boundedness and stability for Cohen-Grossberg neural network with timevarying delays,” Journal of Mathematical Analysis and Applications, vol. 296, no. 2, pp. 665–685, 2004.
5 W. Zhao, “Global exponential stability analysis of Cohen-Grossberg neural network with delays,”
Communications in Nonlinear Science and Numerical Simulation, vol. 13, no. 5, pp. 847–856, 2008.
6 K. Yuan and J. Cao, “An analysis of global asymptotic stability of delayed Cohen-Grossberg neural
networks via nonsmooth analysis,” IEEE Transactions on Circuits and Systems I, vol. 52, no. 9, pp. 1854–
1861, 2005.
7 L. Huang, C. Huang, and B. Liu, “Dynamics of a class of cellular neural networks with time-varying
delays,” Physics Letters A, vol. 345, no. 4–6, pp. 330–344, 2005.
8 J. Zhang, Y. Suda, and H. Komine, “Global exponential stability of Cohen-Grossberg neural networks
with variable delays,” Physics Letters A, vol. 338, no. 1, pp. 44–50, 2005.
9 W. Lu and T. Chen, “New conditions on global stability of Cohen-Grossberg neural networks,” Neural
Computation, vol. 15, no. 5, pp. 1173–1189, 2003.
10 T. Chen and L. Rong, “Delay-independent stability analysis of Cohen-Grossberg neural networks,”
Physics Letters A, vol. 317, no. 5-6, pp. 436–449, 2003.
11 L. Wang and X. Zou, “Exponential stability of Cohen-Grossberg neural networks,” Neural Networks,
vol. 15, no. 3, pp. 415–422, 2002.
12 L. Wan and J. Sun, “Global asymptotic stability of Cohen-Grossberg neural network with
continuously distributed delays,” Physics Letters A, vol. 342, no. 4, pp. 331–340, 2005.
13 Z. Chen and J. Ruan, “Global stability analysis of impulsive Cohen-Grossberg neural networks with
delay,” Physics Letters A, vol. 345, no. 1–3, pp. 101–111, 2005.
14 Q. Song and J. Zhang, “Global exponential stability of impulsive Cohen-Grossberg neural network
with time-varying delays,” Nonlinear Analysis: Real World Applications, vol. 9, no. 2, pp. 500–510, 2008.
15 Q. Song and J. Cao, “Impulsive effects on stability of fuzzy Cohen-Grossberg neural networks with
time-varying delays,” IEEE Transactions on Systems, Man, and Cybernetics, Part B, vol. 37, no. 3, pp.
733–741, 2007.
16 Q. Song and Z. Wang, “Stability analysis of impulsive stochastic Cohen-Grossberg neural networks
with mixed time delays,” Physica A, vol. 387, no. 13, pp. 3314–3326, 2008.
17 C. Bai, “Stability analysis of Cohen-Grossberg BAM neural networks with delays and impulses,”
Chaos, Solitons & Fractals, vol. 35, no. 2, pp. 263–267, 2008.