Document 10815520
advertisement

Gen. Math. Notes, Vol. 20, No. 2, February 2014, pp.50-66
c
ISSN 2219-7184; Copyright ICSRS
Publication, 2014
www.i-csrs.org
Available free online at http://www.geman.in
Smarandache Curves According to Bishop
Frame in Euclidean 3-Space
Muhammed Çetin1 , Yılmaz Tunçer2 and Murat Kemal Karacan3
1
Celal Bayar University, Instutition of Science and Technology, Manisa-Turkey
E-mail: mat.mcetin@hotmail.com
2
Uşak University, Faculty of Sciences and Arts, Department of Mathematics
1 Eylul Campus, 64200, Uşak-Turkey
E-mail: yilmaz.tuncer@usak.edu.tr
3
Uşak University, Faculty of Sciences and Arts, Department of Mathematics
1 Eylul Campus, 64200, Uşak-Turkey
E-mail: murat.karacan@usak.edu.tr
(Received: 12-11-13 / Accepted: 12-12-13)
Abstract
In this paper, we investigate special Smarandache curves according to Bishop
frame in Euclidean 3-space and we give some differential geometric properties
of Smarandache curves. Also we find the centers of the osculating spheres and
curvature spheres of Smarandache curves.
Keywords: Smarandache curves, Bishop frame, Natural curvatures, Osculating sphere, Curvature sphere, Centers of osculating spheres.
1
Introduction
Special Smarandache curves have been investigated by some differential geometers [4,9]. A regular curve in Minkowski space-time, whose position vector
is composed by Frenet frame vectors on another regular curve, is called a
Smarandache Curve. M. Turgut and S. Yilmaz have defined a special case of
such curves and call it Smarandache Curves T B2 in the space E14 [9]. They
have dealed with a special Smarandache curves which is defined by the tangent
51
Smarandache Curves According to Bishop...
and second binormal vector fields. They have called such curves as Smarandache T B2 Curves. Additionally, they have computed formulas of this kind
curves by the method expressed in [10]. A. T. Ali has introduced some special Smarandache curves in the Euclidean space. He has studied Frenet-Serret
invariants of a special case [4].
In this paper, we investigate special Smarandache curves such as Smarandache Curves T N1 , T N2 , N1 N2 and T N1 N2 according to Bishop frame in
Euclidean 3-space. Furthermore, we find differential geometric properties of
these special curves and we calculate first and second curvature (natural curvatures) of these curves. Also we find the centers of the curvature spheres and
osculating spheres of Smarandache curves.
The Bishop frame or parallel transport frame is an alternative approach to
defining a moving frame that is well defined even when the curve has vanishing second derivative. We can parallel transport an orthonormal frame along
a curve simply by parallel transporting each component of the frame. The
parallel transport frame is based on the observation that, while T (s) for a
given curve model is unique, we may choose any convenient arbitrary basis
(N1 (s), N2 (s)) for the remainder of the frame, so long as it is in the normal
plane perpendicular to T (s) at each point. If the derivatives of (N1 (s), N2 (s))
depend only on T (s) and not each other we can make N1 (s) and N2 (s) vary
smoothly throughout the path regardless of the curvature [2,3,8].
In addition, suppose the curve α is an arclength-parametrized C 2 curve.
Suppose we have C 1 unit vector fields N1 and N2 = T ∧ N1 along the curve α
so that hT, N1 i = hT, N2 i = hN1 , N2 i = 0, i.e., T , N1 , N2 will be a smoothly
varying right-handed orthonormal frame as we move along the curve. (To this
point, the Frenet frame would work just fine if the curve were C 3 with κ 6= 0)
But now we want to impose the extra condition that hN10 , N2 i = 0. We say the
unit first normal vector field N1 is parallel along the curve α. This means that
the only change of N1 is in the direction of T . A Bishop frame can be defined
even when a Frenet frame cannot (e.g., when there are points with κ = 0).
Therefore, we have the alternative frame equations
0
T
0 k1 k2
T
N 01 = −k1 0 0 N1 .
N 02
−k2 0 0
N2
One can show that
p
κ(s) = k12 + k22 , θ(s) = arctan kk21 , k1 6= 0,
τ (s) = − dθ(s)
ds
so that k1 and k2 effectively correspond
R to a Cartesian coordinate system for
the polar coordinates κ, θ with θ = − τ (s)ds. The orientation of the parallel
transport frame includes the arbitrary choice of integration constant θ0 , which
52
Muhammed Çetin et al.
disappears from τ (and hence from the Frenet frame) due to the differentiation
[2,3,8].
Bishop curvatures are defined by
k1 = κ cos θ, k2 = κ sin θ
(1)
T = T, N1 = N cos θ − B sin θ, N2 = N sin θ + B cos θ
(2)
and
[7].
2
Smarandache Curves According to Bishop
Frame
In [4], author gave following definitions:
Definition 2.1 Let α = α(s) be a unit speed regular curve in E 3 and
{T, N, B} be its moving Serret-Frenet frame. Smarandache curves T N are
defined by
1
β(s∗ ) = √ (T + N ) .
2
Definition 2.2 Let α = α(s) be a unit speed regular curve in E 3 and
{T, N, B} be its moving Serret-Frenet frame. Smarandache curves N B are
defined by
1
β(s∗ ) = √ (N + B) .
2
Definition 2.3 Let α = α(s) be a unit speed regular curve in E 3 and
{T, N, B} be its moving Serret-Frenet frame. Smarandache curves T N B are
defined by
1
β(s∗ ) = √ (T + N + B) .
3
In this section, we investigate Smarandache curves according to Bishop
frame in Euclidean 3-space. Let α = α(s) be a unit speed regular curve in E 3
and denote by {Tα , N1α , N2α } the moving Bishop frame along the curve α. The
following Bishop formulae is given by
T˙α = k1α N1α + k2α N2α , N˙1α = −k1α Tα , N˙2α = −k2α Tα
with
Tα = N1α ∧ N2α , N1α = −Tα ∧ N2α , N2α = Tα ∧ N1α .
(3)
Smarandache Curves According to Bishop...
2.1
53
Smarandache Curves T N1
Definition 2.4 Let α = α(s) be a unit speed regular curve in E 3 and
{Tα , N1α , N2α } be its moving Bishop frame. Smarandache curves Tα N1α can
be defined by
1
β(s∗ ) = √ (Tα + N1α ) .
(4)
2
We can investigate Bishop invariants of Smarandache curves Tα N1α according to α = α(s). Differentiating (4) with respect to s, we get
β̇ =
dβ ds∗
−1
= √ (k1α Tα − k1α N1α − k2α N2α )
∗
ds ds
2
and
Tβ
(5)
−1
ds∗
= √ (k1α Tα − k1α N1α − k2α N2α )
ds
2
where
s
ds
2 (k1α )2 + (k2α )2
=
.
ds
2
The tangent vector of curve β can be written as follow,
∗
−1
(k1α Tα − k1α N1α − k2α N2α ) .
Tβ = q
2 (k1α )2 + (k2α )2
(6)
(7)
Differentiating (7) with respect to s, we obtain
1
dTβ ds∗
α
α
=
3 (λ1 Tα + λ2 N1 + λ3 N2 )
∗
ds ds
α 2
α 2 2
2 (k1 ) + (k2 )
(8)
where
λ1 = −k˙1α (k2α )2 − 2 (k1α )4 − 3 (k1α )2 (k2α )2 − (k2α )4 + k1α k2α k˙2α
λ2 = −2 (k1α )4 − (k1α )2 (k2α )2 + k˙1α (k2α )2 − k1α k2α k˙2α
λ3 = −2 (k1α )3 k2α − k1α (k2α )3 + 2 (k1α )2 k˙2α − 2k1α k˙1α k2α .
Substituting (6) in (8), we get
√
2
0
Tβ =
(λ1 Tα + λ2 N1α + λ3 N2α ) .
2
2
2
2 (k1α ) + (k2α )
Then, the curvature and principal normal vector field of curve β are respectively,
√ p 2
2 λ1 + λ22 + λ23
κβ =
2
2 (k1α )2 + (k2α )2
54
Muhammed Çetin et al.
and
1
(λ1 Tα + λ2 N1α + λ3 N2α ) .
Nβ = p 2
2
2
λ1 + λ2 + λ3
Thus the binormal vector of curve β is
Bβ = q
1
2 (k1α )2
+
(k2α )2
(σ1 Tα + σ2 N1α + σ3 N2α )
p
λ21 + λ22 + λ23
where
σ1 = λ3 k1α − λ2 k2α , σ2 = λ3 k1α + λ1 k2α , σ3 = −k1α (λ1 + λ2 ) .
We differentiate (5) with respect to s in order to calculate the torsion
o
−1 n
β̈ = √ (k˙1α + (k1α )2 + (k2α )2 )Tα − (k˙1α − (k1α )2 )N1α − (k˙2α − k1α k2α )N2α
2
and
...
1
β = √ (ρ1 Tα + ρ2 N1α + ρ3 N2α )
2
where
ρ1 = −k¨1α − 3k1α k˙1α − 3k2α k˙2α + (k1α )3 + k1α (k2α )2
ρ2 = −3k1α k˙1α − (k1α )3 − k1α (k2α )2 + k¨1α
ρ3 = −2k˙1α k2α − (k1α )2 k2α − (k2α )3 − k1α k˙2α + k¨2α .
The torsion of curve β is
√
((k1α )2 − k˙1α )(ρ3 k1α + ρ1 k2α ) + k1α (k˙2α − k1α k2α )(ρ1 + ρ2 )
2
−(k˙1α + (k1α )2 + (k2α )2 )(ρ2 k2α − ρ3 k1α )
τβ = α α
.
(k1 k˙2 − k˙1α k2α )2 + (k1α k˙2α − 2 (k1α )2 k2α − k˙1α k2α − (k2α )3 )2 + (2 (k1α )3 + k1α (k2α )2 )2
The first and the second normal vectors of curve β are as follow. Then, from
(2) we obtain
√
√
1
µ cos θβ λ1 − sin θβ σ1 Tα +
µ cos θβ λ2 − sin θβ σ2 N1α
β
√
N1 = √
+ µ cos θβ λ3 − sin θβ σ3 N2α
µη
and
N2β
1
=√
µη
√
√
µ sin θβ λ1 + cos θβ σ1 Tα +
µ sin θβλ2 + cos θβ σ2 N1α
√
+ µ sin θβ λ3 + cos θβ σ3 N2α
p
R
where θβ = − τβ (s)ds, µ = 2 (k1α )2 + (k2α )2 and η = λ21 + λ22 + λ23
Smarandache Curves According to Bishop...
55
We can calculate natural curvatures of curve β, so from (1) we get
p
2(λ21 + λ22 + λ23 ) cos θβ
β
k1 =
2
2 (k1α )2 + (k2α )2
and
k2β
2.2
p
2(λ21 + λ22 + λ23 ) sin θβ
=
2 .
2 (k1α )2 + (k2α )2
Smarandache Curves T N2
Definition 2.5 Let α = α(s) be a unit speed regular curve in E 3 and
{Tα , N1α , N2α } be its moving Bishop frame. Smarandache curves Tα N2α can
be defined by
1
β(s∗ ) = √ (Tα + N2α ) .
(9)
2
We can get Bishop invariants of Smarandache curves Tα N2α according to
α = α(s). From (9), we obtain
β̇ =
−1 α
dβ ds∗
√
=
(k2 Tα − k1α N1α − k2α N2α )
∗
ds ds
2
and
Tβ
(10)
−1
ds∗
= √ (k2α Tα − k1α N1α − k2α N2α )
ds
2
where
∗
ds
=
ds
s
(k1α )2 + 2 (k2α )2
.
2
(11)
We can write the tangent vector of curve β as follow,
−1
(k2α Tα − k1α N1α − k2α N2α ) .
Tβ = q
2
2
(k1α ) + 2 (k2α )
(12)
From (12), we have
1
dTβ ds∗
α
α
=
3 (λ1 Tα + λ2 N1 + λ3 N2 )
∗
ds ds
α 2
α 2 2
(k1 ) + 2 (k2 )
where
λ1 = − (k1α )2 k˙2α − (k1α )4 − 3 (k1α )2 (k2α )2 − 2 (k2α )4 + k1α k˙1α k2α
λ2 = − (k1α )3 k2α − 2k1α (k2α )3 + 2k˙1α (k2α )2 − 2k1α k2α k˙2α
λ3 = − (k1α )2 (k2α )2 − 2 (k2α )4 + (k1α )2 k˙2α − k1α k˙1α k2α .
(13)
56
Muhammed Çetin et al.
By using (11) and (13), we obtain
√
2
α
α
0
Tβ =
(λ1 Tα + λ2 N1 + λ3 N2 ) .
α 2 2
α 2
(k1 ) + 2 (k2 )
Then, the first curvature and the principal normal vector field of curve β are
respectively,
√ p 2
2 λ1 + λ22 + λ23
κβ =
2
(k1α )2 + 2 (k2α )2
and
1
Nβ = p 2
(λ1 Tα + λ2 N1α + λ3 N2α ) .
2
2
λ1 + λ2 + λ3
The binormal vector of curve β is
Bβ = q
1
(k1α )2
+
2 (k2α )2
(σ1 Tα + σ2 N1α + σ3 N2α )
p
2
2
2
λ1 + λ2 + λ3
where
σ1 = λ3 k1α − λ2 k2α , σ2 = (λ3 + λ1 ) k2α , σ3 = − (λ2 k2α + λ1 k1α ) .
From (10) we can calculate the torsion of curve β
o
−1 n
β̈ = √ (k˙2α + (k1α )2 + (k2α )2 )Tα − (k˙1α − k1α k2α )N1α − (k˙2α − (k2α )2 )N2α
2
and
...
1
β = √ (ρ1 Tα + ρ2 N1α + ρ3 N2α ) ,
2
where
ρ1 = −k¨2α − 3k1α k˙1α − 3k2α k˙2α + (k1α )2 k2α + (k2α )3
ρ2 = −2k1α k˙2α − (k1α )3 − k1α (k2α )2 − k˙1α k2α + k˙1α
ρ3 = −3k2α k˙2α − (k1α )2 k2α − (k2α )3 + k˙2α .
The torsion of curve β is
α α α
√
k2 (k1 k2 − k˙1α )(ρ3 + ρ1 ) + (k˙2α − (k2α )2 )(ρ2 k2α + ρ1 k1α )
2
−(k˙2α + (k1α )2 + (k2α )2 )(ρ2 k2α − ρ3 k1α )
τβ = α α
.
(k1 k˙2 − k˙1α k2α )2 + (−2 (k2α )3 − (k1α )2 k2α )2 + (2k1α (k2α )2 − k˙1α k2α + k1α k˙2α + (k1α )3 )2
The first and the second normal vectors of curve β are as follow. Then, by
using (2) we get
Smarandache Curves According to Bishop...
N1β
57
1
=√
µη
√
√
µ cos θβ λ1 − sin θβ σ1 Tα +
µ cos θβ λ2 − sin θβ σ2 N1α
√
+ µ cos θβ λ3 − sin θβ σ3 N2α
1
=√
µη
√
√
µ sin θβ λ1 + cos θβ σ1 Tα +
µ sin θβλ2 + cos θβ σ2 N1α
√
+ µ sin θβ λ3 + cos θβ σ3 N2α
and
N2β
p
R
where θβ = − τβ (s)ds, µ = (k1α )2 + 2 (k2α )2 and η = λ21 + λ22 + λ23 .
We can calculate natural curvatures of curve β, so from (1) we get
p
2(λ21 + λ22 + λ23 ) cos θβ
β
k1 =
2
(k1α )2 + 2 (k2α )2
and
k2β
2.3
p
2(λ21 + λ22 + λ23 ) sin θβ
=
2 .
(k1α )2 + 2 (k2α )2
Smarandache Curves N1 N2
Definition 2.6 Let α = α(s) be a unit speed regular curve in E 3 and
{Tα , N1α , N2α } be its moving Bishop frame. Smarandache curves N1α N2α can
be defined by
1
β(s∗ ) = √ (N1α + N2α ) .
(14)
2
We can obtain Bishop invariants of Smarandache curves N1α N2α according
to α = α(s). From (9), we get
β̇ =
dβ ds∗
− (k1α + k2α )
√
Tα
=
ds∗ ds
2
and
Tβ
(15)
ds∗
− (k1α + k2α )
√
=
Tα
ds
2
where
ds∗
kα + kα
= 1√ 2 .
ds
2
The tangent vector of curve β can be written as follow,
Tβ = −Tα .
(16)
(17)
58
Muhammed Çetin et al.
Differentiating (17) with respect to s, we get
dTβ ds∗
= −k1α N1α − k2α N2α
ds∗ ds
(18)
Substituting (16) in (18), we get
Tβ0
√
− 2
(k α N α + k2α N2α ) .
= α
k1 + k2α 1 1
The first curvature and the principal normal vector field of curve β are respectively,
√ q α 2
2 (k1 ) + (k2α )2
κβ =
k1α + k2α
and
Nβ = q
−1
(k1α )2
+
(k2α )2
(k1α N1α + k2α N2α ) .
The binormal vector of curve β is
−1
(k2α N1α − k1α N2α ) .
Bβ = q
α 2
α 2
(k1 ) + (k2 )
We differentiate (15) with respect to s, we get the torsion of curve β
o
−1 n ˙α
β̈ = √
k1 + k˙2α Tα + (k1α )2 + k1α k2α N1α + k1α k2α + (k2α )2 N2α
2
and
... −1
β = √ (ρ1 Tα + ρ2 N1α + ρ3 N2α ) ,
2
where
ρ1 = k¨1α + k¨2α − (k1α )3 − (k1α )2 k2α − k1α (k2α )2 − (k2α )3
ρ2 = 3k1α k˙1α + 2k1α k˙2α + k˙1α k2α
ρ3 = 2k˙1α k2α + 3k2α k˙2α + k1α k˙2α .
The torsion of curve β is
√ − 2 ρ3 (k1α )2 + k1α k2α − ρ2 k1α k2α + (k2α )2
n
τβ =
o.
α
α
α α
α 2 2
α 2
α α 2
(k1 + k2 ) k1 k2 + (k2 ) + (k1 ) + k1 k2
59
Smarandache Curves According to Bishop...
The first and the second normal vectors of curve β are as follow. From (2) we
get
1
{(k2α sin θβ − k1α cos θβ ) N1α − (k2α cos θβ + k1α sin θβ ) N2α } ,
N1β = q
(k1α )2 + (k2α )2
and
1
N2β = q
{− (k1α sin θβ + k2α cos θβ ) N1α + (k1α cos θβ − k2α sin θβ ) N2α }
(k1α )2 + (k2α )2
R
where θβ = − τβ (s)ds.
We can calculate the natural curvatures of curve β, so from (1) we have
q
2((k1α )2 + (k2α )2 ) cos θβ
β
k1 =
k1α + k2α
and
k2β =
2.4
q
2((k1α )2 + (k2α )2 ) sin θβ
k1α + k2α
.
Smarandache Curves T N1 N2
Definition 2.7 Let α = α(s) be a unit speed regular curve in E 3 and
{Tα , N1α , N2α } be its moving Bishop frame. Smarandache curves Tα N1α N2α can
be defined by
1
β(s∗ ) = √ (Tα + N1α + N2α ) .
(19)
3
We can investigate Bishop invariants of Smarandache curves Tα N1α N2α according to α = α(s). By using (19), we get
β̇ =
dβ ds∗
−1
= √ ((k1α + k2α ) Tα − k1α N1α − k2α N2α )
∗
ds ds
3
and
Tβ
(20)
ds∗
−1
= √ ((k1α + k2α ) Tα − k1α N1α − k2α N2α )
ds
3
where
∗
ds
=
ds
s
2 (k1α )2 + k1α k2α + (k2α )2
.
3
(21)
60
Muhammed Çetin et al.
The tangent vector of curve β is as follow,
−1
α
α
α α
α α
Tβ = q ((k1 + k2 ) Tα − k1 N1 − k2 N2 ) .
α 2
α α
α 2
2 (k1 ) + k1 k2 + (k2 )
(22)
Differentiating (22) with respect to s, we get
dTβ ds∗
1
α
α
= √ 3 (λ1 Tα + λ2 N1 + λ3 N2 )
∗
ds ds
α 2 2
α α
α 2
2 2 (k1 ) + k1 k2 + (k2 )
(23)
where
λ1 = −2k˙1α (k2α )2 − (k1α )2 k˙2α + k1α k2α k˙2α − 2 (k1α )4 − 2 (k1α )3 k2α
−4 (k1α )2 (k2α )2 − 2k1α (k2α )3 − 2 (k2α )4 + k1α k˙1α k2α + k˙1α (k2α )2
λ2 = −2 (k1α )4 − 4 (k1α )3 k2α − 4 (k1α )2 (k2α )2 − 2k1α (k2α )3 + k1α k˙1α k2α
+2k˙1α (k2α )2 − (k1α )2 k˙2α − 2k1α k2α k˙2α
λ3 = −2 (k1α )3 k2α − 4 (k1α )2 (k2α )2 − 4k1α (k2α )3 − 2 (k2α )4
+2 (k1α )2 k˙2α + k1α k2α k˙2α − 2k1α k˙1α k2α − k˙1α (k2α )2 .
Substituting (21) in (23), we get
√
3
α
α
0
Tβ = (λ1 Tα + λ2 N1 + λ3 N2 ) .
α 2
α α
α 2 2
4 (k1 ) + k1 k2 + (k2 )
The first curvature and the principal normal vector field of curve β are respectively,
√ p 2
3 λ1 + λ22 + λ23
κβ = 2
4 (k1α )2 + k1α k2α + (k2α )2
and
1
Nβ = p 2
(λ1 Tα + λ2 N1α + λ3 N2α ) .
λ1 + λ22 + λ23
Hence, the binormal vector of curve β is
Bβ = q
1
2
(k1α )2
+
k1α k2α
+
(24)
(σ1 Tα + σ2 N1α + σ3 N2α )
p
2
2
2
λ1 + λ2 + λ3
(25)
(k2α )2
where
σ1 = λ3 k1α − λ2 k2α , σ2 = λ3 (k1α + k2α ) + λ1 k2α , σ3 = − (λ2 (k1α + k2α ) + λ1 k1α ) .
Differentiating (20) with respect to s, we can calculate the torsion of curve β,
−1 (k˙1α + k˙2α + (k1α )2 + (k2α )2 )Tα − (k˙1α − (k1α )2 − k1α k2α )N1α
β̈ = √
−(k˙2α − k1α k2α − (k2α )2 )N2α
3
61
Smarandache Curves According to Bishop...
and
...
1
β = √ (ρ1 Tα + ρ2 N1α + ρ3 N2α ) ,
3
where
ρ1 = −k¨1α − k¨2α − 3k1α k˙1α − 3k2α k˙2α + (k1α )3 + (k1α )2 k2α + k1α (k2α )2 + (k2α )3
ρ2 = −3k1α k˙1α − 2k1α k˙2α − (k1α )3 − k1α (k2α )2 − k˙1α k2α + k¨1α
ρ3 = −2k˙1α k2α − 3k2α k˙2α − (k1α )2 k2α − (k2α )3 − k1α k˙2α + k¨2α .
The torsion of curve β is
α
˙ − (k α )2 − k α k α )(−ρ3 k α − ρ3 k α − ρ1 k α )
(
k
1
1
1
2
1
2
2
√
3 +(k˙2α − k1α k2α − (k2α )2 )(ρ2 k1α + ρ2 k2α + ρ1 k1α )
−(k˙1α + k˙2α + (k1α )2 + (k2α )2 )(−ρ3 k1α + ρ2 k2α )
τβ = α α
.
(k1 k˙2 − k˙1α k2α )2 + (k1α k˙2α − 2 (k1α )2 k2α − 2k1α (k2α )2 − 2 (k2α )3 − k˙1α k2α )2
+(2 (k α )3 + 2 (k α )2 k α + 2k α (k α )2 − k˙α k α + k α k˙α )2
1
1
2
1
2
1
2
1
2
The first and the second normal vectors of curve β are as follow. By using
(2) we obtain
N1β
1
=√
2µη
α √
√
2µ cos θβ λ1 − sin
θ
σ
T
+
2µ
cos
θ
λ
−
sin
θ
σ
N1
β
1
α
β
2
β
2
√
+ 2µ cos θβ λ3 − sin θβ σ3 N2α
1
=√
2µη
α √
√
2µ sin θβ λ1 + cos
θ
σ
T
+
2µ
sin
θ
λ
+
cos
θ
σ
N1
β
1
α
β
2
β
2
√
,
α
+ 2µ sin θβ λ3 + cos θβ σ3 N2
and
N2β
p
R
where θβ = − τβ (s)ds, µ = (k1α )2 + k1α k2α + (k2α )2 and η = λ21 + λ22 + λ23 .
We can calculate the natural curvatures of curve β, so from (1) we get
p
3(λ21 + λ22 + λ23 ) cos θβ
4((k1α )2 + k1α k2α + (k2α )2 )2
k1β
=
k2β
p
3(λ21 + λ22 + λ23 ) sin θβ
=
.
4((k1α )2 + k1α k2α + (k2α )2 )2
and
62
Muhammed Çetin et al.
3
Curvature Spheres and Osculating Spheres
of Smarandache Curves
Definition 3.1 Let α : (a, b) → Rn be a regular curve and let F : Rn →
R be a differentiable function. We say that a parametrically defined curve
α and an implicity defined hypersurface F −1 (0) have contact of order k at
α(t0 ) provided we have (F oα)(t0 ) = (F oα)0 (t0 ) = ... = (F oα)(k) (t0 ) = 0 but
(F oα)(k+1) (t0 ) 6= 0 [5].
If any circle which has a contact of first-order with a planar curve, it is
called the curvature circle. If any sphere which has a contact of second-order
with a space curve, It is called the curvature sphere. Furthermore, if any sphere
which has a contact of third-order with a space curve, it is called the osculating
sphere.
Theorem 3.2 Let β(s∗ ) be a unit speed Smarandache curve of α(s) with
first curvature k1β and second curvature k2β , then the centres of curvature spheres
of β(s∗ ) according to Bishop frame are
∗
∗
c(s ) = β(s ) +
r
where Γ =
r2
(k1β )2
−
(k2β )2
k1β ∓ k2β Γ
4(k1β )2
N1β
+
3k1β ± k2β Γ
4k1β k2β
N2β
− 1.
Proof: Assume that c(s∗ ) is the centre of curvature sphere of β(s∗ ), then
radius vector of curvature sphere is
c − β = δ1 Tβ + δ2 N1β + δ3 N2β .
Let we define the function F such that
F = hc(s∗ ) − β(s∗ ), c(s∗ ) − β(s∗ )i − r2 .
First and second derivatives of F are as follow.
F 0 = −2δ1
F 00 = −2(k1β δ2 + k2β δ3 − 1).
The condition of contact of second-order requires F = 0, F 0 = 0 and F 00 = 0.
Then, coefficients δ1 , δ2 , δ3 are obtained
δ1 = 0, δ2 =
k1β ∓k2β Γ
4(k1β )2
, δ3 =
3k1β ±k2β Γ
4k1β k2β
.
63
Smarandache Curves According to Bishop...
Thus, centres of the curvature spheres of Smarandache curve β are
c(s∗ ) = β(s∗ ) +
k1β ∓ k2β Γ
4(k1β )2
N1β +
3k1β ± k2β Γ
4k1β k2β
N2β .
Let δ3 = λ, then c(s∗ ) = β(s∗ ) + δ2 N1β + λN2β is a line passing the point
β(s∗ ) + δ2 N1β and parallel to line N2β . Thus we have the following corollary.
Corollary 3.3 Let β(s∗ ) be a unit speed Smarandache curve of α(s) then
each centres of the curvature spheres of β are on a line.
Theorem 3.4 Let β(s∗ ) be a unit speed Smarandache curve of α(s) with
first curvature k1β and second curvature k2β , then the centres of osculating
spheres of β(s∗ ) according to Bishop frame are
c(s∗ ) = β(s∗ ) +
(k2β )0
(k1β )0
β
β
β 0 N1 −
β 0 N2 .
β 2 k2
β 2 k2
(k1 ) kβ
(k1 ) kβ
1
1
Proof: Assume that c(s∗ ) is the centre of osculating sphere of β(s∗ ), then
radius vector of osculating sphere is
c(s∗ ) − β(s∗ ) = δ1 Tβ + δ2 N1β + δ3 N2β .
Let we define the function F such that
F = hc(s∗ ) − β(s∗ ), c(s∗ ) − β(s∗ )i − r2 .
First, second and third derivatives of F are as follow.
F 0 = −2δ1
F 00 = −2(k1β δ2 + k2β δ3 − 1)
F 000 = −2 (k1β )0 δ2 − (k1β )2 δ1 + (k2β )0 δ3 − (k2β )2 δ1 .
The condition of contact of third-order requires F = 0, F 0 = 0, F 00 = 0 and
F 000 = 0. Then, coefficients δ1 , δ2 , δ3 are obtained
δ1 = 0, δ2 =
(k2β )0
(k1β )2
β
k2
β
k1
!0 ,
δ3 = −
(k1β )0
(k1β )2
β
k2
β
k1
!0 .
Thus, centres of the osculating spheres of Smarandache curve β can be written
as follow
(k2β )0
(k1β )0
β
β
c(s∗ ) = β(s∗ ) +
N
−
β 0 1
β 0 N2 .
k
k
(k1β )2 k2β
(k1β )2 k2β
1
1
64
Muhammed Çetin et al.
Corollary 3.5 Let β(s∗ ) be a unit speed Smarandache curve of α(s) with
first curvature k1β and second curvature k2β , then the radius of the osculating
sphere of β(s∗ ) is
r
2 2
(k1β )0 + (k2β )0
r(s∗ ) =
.
β 0
k
(k1β )2 k2β
1
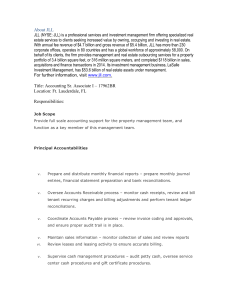
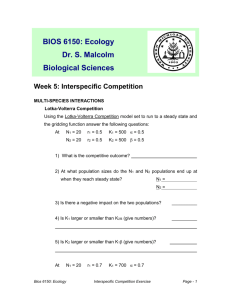
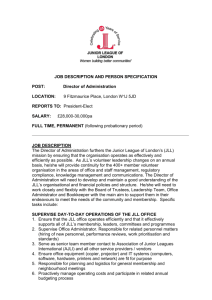
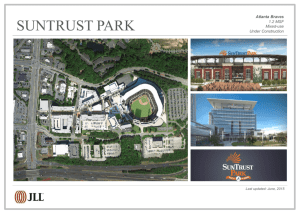
Example 3.6 Let α (t) be the Salkowski curve given by α (t) = (α1 (t) , α2 (t) , α3 (t))
where
1
1−n
1+n
1
α1 = √
−
sin ((1 + 2n) t) −
sin ((1 − 2n) t) − sin t
4 (1 + 2n)
4 (1 − 2n)
2
1 + m2
1−n
1
1+n
1
α2 = √
cos ((1 + 2n) t) +
cos ((1 − 2n) t) + cos t
4 (1 − 2n)
2
1 + m2 4 (1 + 2n)
cos (2nt)
√
α3 =
4m 1 + m2
m
and n = √1+m
2 . α (t) can be expressed with the arc lenght parameter. We get
unit speed regular curve by using the parametrization
√
1
t = arcsin n 1 + m2 s .
n
Furthermore,
graphics of special Smarandache curves are as follow. Here m =
√
3.
Smarandache Curves According to Bishop...
65
References
[1] A. Gray, Modern Differential Geometry of Curves and Surfaces with Mathematica (2nd Edition), CRC Press, (1998).
[2] A.J. Hanson and H. Ma, Parallel transport approach to curve framing,
Indiana University, Techreports-TR425, January 11 (1995).
[3] A.J. Hanson and H. Ma, Quaternion frame approach to streamline visualization, IEEE Transactions on Visualization and Computer Graphics,
I(2) (June) (1995), 164-174.
[4] A.T. Ali, Special Smarandache curves in the Euclidean space, International Journal of Mathematical Combinatorics, 2(2010), 30-36.
[5] B. Bükçü and M.K. Karacan, On the slant Helices according to Bishop
frame, International Journal of Computational and Mathematical Sciences, 3(2) (Spring) (2009), 1039-1042.
[6] B. Bükçü and M.K. Karacan, Special Bishop motion and Bishop Darboux rotation axis of the space curve, Journal of Dynamical Systems and
Geometric Theories, 6(2008), 27-34.
[7] E. Turhan and T. Körpınar, Biharmonic slant Helices according to
Bishop frame in E 3 , International Journal of Mathematical Combinatorics, 3(2010), 64-68.
66
Muhammed Çetin et al.
[8] L.R. Bishop, There is more than one way to frame a curve, Amer. Math.
Monthly, 82(3) (1975), 246-251.
[9] M. Turgut and S. Yilmaz, Smarandache curves in Minkowski space-time,
International Journal of Mathematical Combinatorics, 3(2008), 51-55.
[10] S. Yilmaz and M. Turgut, On the differential geometry of the curves in
Minkowski space-time I, Int. J. Contemp. Math. Sciences, 3(27) (2008),
1343-1349.