ETNA
advertisement

ETNA
Electronic Transactions on Numerical Analysis.
Volume 26, pp. 385-420, 2007.
Copyright 2007, Kent State University.
ISSN 1068-9613.
Kent State University
etna@mcs.kent.edu
STABILITY PROPERTIES OF DIFFERENTIAL-ALGEBRAIC EQUATIONS AND
SPIN-STABILIZED DISCRETIZATIONS
PETER KUNKEL AND VOLKER MEHRMANN
Abstract. Classical stability properties of solutions that are well-known for ordinary differential equations
(ODEs) are generalized to differential-algebraic equations (DAEs). A new test equation is derived for the analysis
of numerical methods applied to DAEs with respect to the stability of the numerical approximations. Morevover,
a stabilization technique is developed to improve the stability of classical DAE integration methods. The stability
regions for these stabilized discretization methods are determined and it is shown that they much better reproduce the
stability properties known for the ODE case than in the unstabilized form. Movies that depict the stability regions
for several methods are included for interactive use.
Key words. nonlinear differential-algebraic equations, stability, asymptotic stability, Lyapunov stability, spinstabilized discretization, test equation, strangeness index
AMS subject classifications. 65L80, 65L20, 34D20, 34D23
1. Introduction and survey of previous results. In this paper we study different stability concepts for differential-algebraic equations (DAEs) as well as stabilization techniques
for numerical methods. In particular, we consider initial value problems for general implicit
systems of DAEs
(1.1)
with an initial condition
!" , with $#&% ( '*),+&'-)/+ . 10,23
on the unbounded
interval
. 4 0,2 open sets.
and ) + ) +5
(1.2)
sufficiently smooth
DAEs like (1.1) arise in constrained multibody dynamics [9], electrical circuit simulation
[11, 12], chemical engineering [7, 8], and many other applications, in particular when the
dynamics of a system is constrained to a manifold or when different physical models are
coupled together [28].
While DAEs provide a very convenient modeling concept, many numerical difficulties
arise due to the fact that the dynamics is constrained to a manifold, which often is only given
implicitly; see [31] or the recent textbook [21]. These difficulties are typically characterized by one of many index concepts that exist for DAEs; see [2, 10, 13, 21]. The fact that
the dynamics of DAEs is constrained also requires a modification of the classical stability
concepts that were developed for ODEs. Appropriate stability concepts for DAEs have been
discussed already in several publications. The extension of the classical Lyapunov stability theory for linear DAEs with constant coefficients has been studied in [36, 37, 38]. For
particular classes of DAEs, the classical stability concepts known for ODEs and for the corresponding integration methods have been analyzed in [1, 15, 16, 25, 27, 33, 34, 39]. Often
6 Received September 12, 2006. Accepted for publication June 27, 2007. Recommended by S. Vandewalle. The
research
was supported by the Mathematisches Forschungsinstitut Oberwolfach Research-in-Pairs Program.
Mathematisches
Institut, Universität Leipzig, Augustusplatz 10–11, D-04109 Leipzig, Fed. Rep. Germany
(kunkel@mathematik.uni-leipzig.de).
Institut für Mathematik, MA 4-5, Technische Universität Berlin, D-10623 Berlin, Fed. Rep. Germany
(mehrmann@math.tu-berlin.de). Supported by Deutsche Forschungsgemeinschaft, through M ATHEON , the
DFG Research Center “Mathematics for Key Technologies” in Berlin.
385
ETNA
Kent State University
etna@mcs.kent.edu
386
P. KUNKEL AND V. MEHRMANN
this leads to modifications of the DAEs by global transformations to some canonical form to
avoid instabilities in the numerical methods.
All these papers deal with special classes or special formulations of DAEs and usually
some restrictions on the size of the index of the DAE. In this paper we extend the classical
stability concepts for ordinary differential equations to general DAEs of the form (1.1) of
arbitrary index; see Section 3.
The second topic of this paper is the development of stable integration methods for DAEs,
where stability problems arise that cannot be observed for ODEs, as, e.g., the following example taken from [27] demonstrates.
E XAMPLE 1.1. Consider the linear DAE
798(:";<8 7 ? 7B:DC 8E:F; :DCG8 7 H? 8(:F; 8 :"; = I@J=
>= A
@&=
C 8L K ; . This system of differentiation index ; has the solution
with real parameters and
? MN 8(:O; !P ? ;E:J8 @ MQ
@ RSUTVPAWVXMYZ
@ [V\
^]_ as ^]` independently of H@a[ for 8bC . On the other hand, using
Obviously,
a constant stepsize c , the implicit Euler method yields numerical approximations
Ide ? f 8g:"; P ? ;D:h8 dZ
Ide @ Q
AdMe @ ;j;jii c C8 Id P ? e @ c
;oi c 8 n b n ;oi c C n .
d
m
e
k
]
@
Q
]
which satisfy
as l
independently
of
if and only if n
8 C for which the exact solution asymptotically goes to
Hence, there exist parameter values
zero while the numerical solution grows unboundedly.
Example 1.1 demonstrates that for DAEs instabilities may arise that cannot be observed
for ODEs. One can show that this instabilitity is caused by the time-dependence of the kernel
of the leading coefficient matrix. Such a time-dependence easily arises when a higher index
problem (even in semi-explicit form) is turned into a problem with reduced index by differentiation. Since these effects do not occur in ordinary differential equations, the classical test
equation
(1.3)
-
p
3qp5#*r^
is not sufficient to analyze this instability.
For this reason and in order to allow a better comparison of different integration methods
for DAEs, in Section 4 we will take up on Example 1.1 and suggest a new linear test equation
for DAEs which generalizes (1.3). This new test equation is
7L;s:ut 7 ? 7 p t ;D: p 7 ? \
v: ; j; iwt = A
@&=
= A
@&=
t
and combines the classical test equation with an algebraic equation in such a way that the
kernel of the corresponding matrix function spins and is a measure for the size of the
time derivative of a kernel function.
We will show that with the variation of these two parameters many stability properties
of classical DAE integration methods can be tested and compared. A comparison of wellknown DAE integration methods for this test equation is presented in Section 5, where also
DAE stability functions for these methods are derived.
Finally, in Section 6 we derive a new stabilization technique for general DAE integration
methods (which we call spin-stabilization). We analyze the stability behavior of several classical DAE integrators and show that with this technique more appropriate stability regions
can be achieved.
x
ETNA
Kent State University
etna@mcs.kent.edu
387
SPIN-STABILIZED DAE DISCRETIZATION
2. Preliminaries, notation, and definitions.
y and z|{ , we denote the open ball with
z
y
z
z f~m
# yn : b z A z , i.e.,
and the corresponding closed ball by }
} M
z } z ~
# yfn : (z \
@ e associated Euclidian norm
By , we denote the Euclidian scalar product and by the
2
0
02 2.
in
as well as the associated spectral norm for matrices in
together with (1.2) possesses a unique solution on , then we denote it by
If (1.1)
when
we want to stress its dependence on the initial condition.
} M } M
in some vector space
2.1. Notation. For
radius around
in by
, i.e.
2.2. DAE theory. In this section we briefly recall some concepts from the theory of
differential-algebraic equations, see [2, 10, 21, 30]. We follow [21] in notation and style of
presentation.
D EFINITION 2.1. Consider system (1.1) with sufficiently smooth . A function
is called a solution of (1.1) if
and satisfies (1.1) pointwise. It is called a
solution of the initial value problem (1.1)–(1.2) if is a solution of (1.1) and satisfies (1.2).
An initial condition (1.2) is called consistent if the corresponding initial value problem has
at least one solution.
It is possible to weaken this solution concept [22, 26, 29], but we will not consider such
weaker solution concepts in this paper.
For the DAE system (1.1), as in [4, 5, 19], we introduce a nonlinear derivative array of
the form
5#-% ? 10,2 0,2
]
3
M1
33
m\\\
S ? X
M
M
M1
3
\m\\1
S ? X ` Y .
\
..
Y M
3 with respect to selected variables from
Partial derivatives of?
3¡ ¢ , e. g.,
NM1
33
m\\\m
S X are denoted
by
3¡ + ¤£ £ 3
¤ ¡ + . e¦¥¦¥¦¥ e +§¨©Gª« f/£ £ 3 m £ £ 3¬Z\
+
+.
+ § ©ª[«
which stacks the original equation and all its derivatives up to level in one large system, i. e.,
the vector
A corresponding notation is also used for partial derivatives of other functions.
In order to analyze existence and uniqueness of solutions, we introduce the solution set
of the nonlinear algebraic equation associated with the derivative array
for some integer
, given by
®
¯
­
~ ­ # o' 0 2 ' 0 2 ' \ \m\ ' 0 2 n ­ ­ \
­
We make the following hypothesis; see [21].
¯
H YPOTHESIS 2.2. Consider the general system of nonlinear differential-algebraic equa­ is not empty and for every point
¯
®
tions (1.1). There exist
, ° , ± , ² , and ³ such that
M m\\m\V
S ­ ? X Lintegers
# ­ there
exists a (sufficiently small) neighborhood in which the
following properties hold:
ETNA
Kent State University
etna@mcs.kent.edu
388
¯
$ ® i; º : ± on ­ such that there exists a smooth
i; ¼ '-± satisfying
of size ®
»E@ ½ ­ ¡ + . e¦¥¦¥¦¥ e + §¦¹V©Gª« ¯
­ such that there exists a smooth full rank matrix
on
± satisfying
»E@ ½ ¿­ ¡ + ¾ @o\
@ ² Àº : ± such that there exists a smooth full rank matrix
3. We have ´!µ·? ¶¸ +a. ¾ º
function » of size '² satisfying
´!µ·¶¸u»E? ½ + . ¾ @E ² \
As in [19, 21], we call the smallest possible ® for which Hypothesis 2.2 is valid the
P. KUNKEL AND V. MEHRMANN
­ ¡ + . e¦¥¦¥¦¥ e + §¦¹V©Gª[«
1. We have ´!µ·¶¸
@
full rank matrix function »
¯
­
on .
@ ­¡ 2. We have ´µa@ ¶¸^» ½ º + Mº ± :
function ¾ of size '
strangeness index of (1.1). Systems with vanishing strangeness index are called strangenessfree.
It has been shown in [20] that Hypothesis 2.2 implies locally (via the implicit function
theorem) the existence of a reduced system such that the solutions are in one-to-one correspondence and the differential and algebraic part contained in the given DAE are separated.
This result can be globalized when we start with a solution in the sense that we have path
ÁBMD# ­ ? for all ^ # ÁÂ#% 0 S ­ @ X 2 . In the present context, where stability questions are conwith some
cerned, we must take care that the involved transformations do not alter the behavior of the
/]q . We therefore sketch the construction of the reduced system along the
solution as
¯
lines of [21] and pay special attention to the conservation of the stability properties of the
given DAE.
Due to Hypothesis 2.2 there exist
e Ä
e
­ ? eÄ
» @Ã#5% 0 S X 2 ¾ @Ã#% 10 2 2 P V » ?(#5% 0 2 V with the described properties. Since Gram-Schmidt orthonormalization is a smooth process,
we may assume without loss of generality that the columns of these matrix functions are
pointwise orthonormalized. Let then
10jS ­ ? X 2 e S ­ ? X 2 P Ä @ #5% 10 2 e Ä ? #-% 10 2 e 2 P ¾(Å
»EÅ
@ Å » @ ¬Z ¾ @ Å ¾ @ ¬Z3 » ? Å » ? ¬ are pointwise orthogonal. Furthermore, there exist
­ ? eÄ
­ ? e­ ? Ä
¾ ?(#% 0 S X 2 V ¾ ? Å #% 10 S X 2 S X 2 P ? ? ¬ is pointwise orthogonal and
such that ¾ Å ¾
»o@ Å M ½ ­ ¡ .+ e¦¥¦¥¦¥ e + §Æ¹V©ª[« M1
ÁB ¾ ? for all ^# \
»o@ Å #5%
be such that »
If we define a function
Ç
via
7 ­
M
1
3
H
È
Ç
¾ ·? M ½
i » a@ M1È : ÁBM1É=
ETNA
Kent State University
etna@mcs.kent.edu
389
SPIN-STABILIZED DAE DISCRETIZATION
then
Ç ¿MÁBMV1j 7 ­ ¡ e¦¥¦¥¦¥ e
.+ + §Æ¹V©ª[?« M 1
ÁB » @a = \
(b)
Ç ¢e Ê M1
ÁB
¾ ½
¢e ÊI MVÁBMV1 is nonsingular for all u# . Thus we can locally solve
By construction Ç
È
for and as
È-Ì¿Ë @M
H ÍBËÁ M1
A\
(a)
It can then be shown that the equation
(2.1)
Ë @ Aj
is just the requirement that satisfies all constraints that are contained in (1.1) for time .
With the change of variables
Î ¾ V@ ? i ¾ @ Å A@aQ
?o ¾ @ ½ 3Q
A@( ¾ @ Å ½ the equation (2.1) turns into
(2.2)
Ë @ M ¾ @ M
? i ¾ @ Å M
@ \
|# ?MÏ ¾ @ ½ ¿M
j # Ë @M ¾ @M
H?M i ¾ @ Å M
I@GM1
(a)
Ë @ ¡ + ¾ @ Å M is nonsingular\
(b)
@ as @ Ð&M
? and we have
Thus, we can solve (2.2) for
A@FÐ&
H? for all j# \
(2.3)
Note that this transformation and the corresponding back-transformation preserve the Euclidian norm of the unknown functions at every point
. If we set
,
then it follows that for all
I@M ¾ @ Å M ½ ¿M
Besides (2.3) we have
(2.4)
@ MÐ Y M1
? M i Ð + ª ? M1 ? where we use the partition
VÑ 2 m ^¬ABËÁ M
¿M1 7 a@? =
compare the proof of Theorem 4.13 in [21]. We then obtain
¾ @ ? M i ¾ @ Å @ ? M ½ »
(2.5)
¾ @ M
? i ¾ @ M ? M i ¾ @ Å M
@ M i ¾ @ Å M
@ M1 for all ^# H@ @
in which we can eliminate , via (2.3) and (2.4), respectively. If we define
ÒË ?
? ?V » ?·M ½ ¾ @a
H? i ¾E@ Å Ð&
H?
V
¾ @aM
H? i ¾ @a ?aM i ¾E@ Å Ð&M1
H?
i ¾E@ Å MÓÐ Y H?m i Ð + ª M
? ?
ETNA
Kent State University
etna@mcs.kent.edu
390
P. KUNKEL AND V. MEHRMANN
M
? M3
? M1 solves Ë ? M ? ? . Furthermore,
ÒË ? ¡ ¢ H?aMV ?M1 » ? ½ + . M1
MV M ¾ @M i ¾E@ Å MÐ + M1
H?aM1
ª
ª
Ñ
j
U
¬
N
Á
Ð
M
1
H
a
?
M
2
+
where
m
. To determine ª
one observes that from
Ë @ M ¾ @ M
? i ¾ @ Å MÐ + M
? 1 for all ^# ª
then
it follows that
Ë @ ¡ + M1
M1V ¾ @ i ¾ @ Å MÐ + ? j
ª
for all
j# and hence, using (2.1) we obtain
» @ M ½ ­ ¡ + M1
MVÁB1 ¾ @a i ¾ @ Å MÐ + ª ?·j for all j# \
@ @
@
By the construction of » , ¾ , and ¾ Å , we immediately obtain that
Ð + M1
H?aM1 for all j# ª
¡
¢
,
Ë
?
M
1
H
a
?
M
a
?
M
1
j# . Thus, we can solve ÒË ?M1
H?· ?V
and that
is nonsingular for all
ª
for ? according
to
? Ô(
? \
?
? Á
If we require that
differentiable and that that the part of satisfies
? ·MÕH
?aM for all ^is# continuously
, then we see that the given solves the DAE,
?oÔgM1
H?m
(a)
A@(OÐ&
?V\
(2.6)
(b)
Summarizing the above construction, we observe that we only have applied one transformation of the variable . This transformation together with its inverse are pointwise orthogonal
such that it preserves the behavior of the solution as
. For the applications of the
implicit function theorem, however, we must require that the corresponding neighborhoods
do not shrink to a point as
. Sufficient for this is the additional assumption that there
exists a set
such that
for sufficiently large
and that the implicit function theorem can always applied in the whole set . Note that this
condition is trivially satisfied when we study an equilibrium solution of (1.1) given by the
property that
and
for all
. Instead of (1.1) we can
then concentrate on the investigation of (2.6) due to the fact that under mild assumptions the
solutions of (1.1) and (2.6) are locally in one-to-one correspondence; see [21].
In the special case of a linear DAE
L]Ö
^]Ì
2
0
× 4 9'
' m' 0 2
O
Mv
B#F0¿2
¯
M
¿MVÁBM1-# ×
a19# ­ ?
Ï# ×
H*
Ø9M
i"Ù MV
x
1ØÚ#% 10¿2 e 2 and Ù #% 0¿2 are sufficiently smooth, the corresponding
where x
reduced DAE (2.6) is linear as well and of the form
? Ø ?1? M
? iÛÙ ? M
(a)
@ Ø @!? M
? iÛÙ @ M\
(2.8)
(b)
¿Ë o(ËØ of matrix functions
This also shows that if the DAE belonging to a pair x
is strangeness#w% 10¿2 e 2 and
free then there is a pointwise nonsingular
matrix function Ü
a pointwise
e
?
#5% 0¿2 2G , such that
orthogonal matrix function Ý
7 Ñ ËØ : Ë 7 ØÃ?1? \
Ë
Û= Ü Ý Ü x Ý
Ø(@!? : Ñ Ä =
Ü x9Ý
(2.9)
(2.7)
ETNA
Kent State University
etna@mcs.kent.edu
391
SPIN-STABILIZED DAE DISCRETIZATION
Summarizing the above construction, every DAE satisfying Hypothesis 2.2 can be transformed to a strangeness-free DAE,
» ? M ½ Ë @M
H
(2.10)
which possesses the same solutions as the original DAE. Even more, we can transform to a
specially structured DAE (2.6) such that stability properties of the solutions are preserved.
Thus, w.l.o.g. we can study stability questions for (2.6) instead of the original DAE (1.1).
Moreover, also in the numerical treatment we may assume w.l.o.g. that the DAE is given in
the form (2.10), since this form can locally be determined numerically. Hence, dealing with
DAEs both theoretically concerning stability questions and numerically, we may assume that
the given DAE is strangeness-free.
2.3. Stability concepts for ODEs. In this section, we briefly recall classical stability
concepts for ordinary differential equations
Î
Ù M
HQ^# \
(2.11)
See, e.g., [17, 35] for more details on this topic. We include proofs when we need the notation
and parts of them when we discuss similar results for DAEs.
of (2.11) is called
D EFINITION 2.3. A solution
1. stable if for every
there exists
such that
(a) the initial value problem (2.11) with initial condition
is solvable
on for all
with
;
(b) the solution
satisfies
on .
2. asymptotically stable if it is stable and there exists
such that
(a) the initial value problem (2.11) with initial condition
is solvable
on for all
with
;
(b) the solution
satisfies
.
3. exponentially stable if it is stable and exponentially attractive, i.e., if there exist
,
, and
such that
(a) the initial value problem (2.11) with initial condition
is solvable
on for all
with
;
(b) the solution satisfies the estimate
on .
Note that we can transform the ODE (2.11) in such a way that a given solution
is mapped to the trivial solution by simply shifting the arguments according to
8 { ç"{ 5·Þ]ß
¿M 1
8 { à|{
M v
IË Ï#0,2
IË : bO8
M1 Ë
IË
:
I
b
z9{
Mv
IË Ï#0,2
IË : b z
M1 Ë áãâãä YåÏæ ¿M1 Ë : ¿M è&{ M v
Ë #0,2
Ë : bO8
Ë : ¿M1 1
Ë à
Ë Ë b ç R PIéSYPAYMêX
M1 Îë Ù ë M ë Ù M ë i ¿M 1 : £ £ Y ¿M V\
(2.12)
When studying the stability of a selected solution, we may therefore assume without loss of
generality that the selected solution is the trivial solution. This also applies to DAEs. In the
following, we will concentrate on equilibrium solutions , i.e., solutions with
independent of , although we may simply set
.
We will also study further concepts which are not related to a selected solution such as
contractivity and dissipativity.
D EFINITION 2.4. The ODE (2.11) is called contractive if for any two solutions
the scalar function
defined by
is monotonically nonincreasing. It is called exponentially contractive if decays exponentially.
D EFINITION 2.5. The ODE (2.11) is called dissipative if there exists a bounded set
with the property that for any bounded set
there exists
with
for all
and
. In this case the set is called absorbing.
H
3o
² ]É0 0,2
Ë # î
{ Ë
í
3
@
² ML ¿M : ì M @
²
^ Ë ïÛ î 4 02
a1
ì
M1 Ë ^í # 4 í
ETNA
Kent State University
etna@mcs.kent.edu
392
P. KUNKEL AND V. MEHRMANN
We start our survey of stability results with the special case of linear ODEs. In view of
(2.12) it is sufficient to study homogeneous equations
Î
Ø9M
3\
(2.13)
Since we obtain (2.13) no matter which solution we want to look at, the stability properties
of Definition 2.3 are merely properties of the given linear ODE. In particular, the initial value
problem
£ £ Ymð MØ/M ð M·V ð Ma1
Ñ 2
^Þ] ð on , so-called fundamental solution, and the solution of
possesses a solution
can be written as j ð M1
I . The following characterizations
(2.13) with
are then straightforward.
T HEOREM 2.6. The trivial solution of the linear homogeneous ODE (2.13)
1. is stable if and only if there exists a constant
with
on ;
2. is asymptotically stable if and only if
for
;
3. is exponentially stable if there exists
and
such that
on .
In the general nonlinear case, we can only expect sufficient conditions that guarantee the
specific stability properties. The classical result is given in the so-called Lyapunov stability
theorems; see, e.g., [17]. In this context, we use the notation
(
) for symmetric
(Hermitian) matrices
to denote that
is positive (semi-)definite.
D EFINITION 2.7. Let be an (open) neighborhood of an equilibrium solution
of the
ODE (2.11). A function
is called Lyapunov function associated with
if
1.
for all
,
2.
for all
, where
,
3. there exists a continuous function
with
for all
and
for all
.
T HEOREM 2.8. Let be a Lyapunov function associated with an equilibrium solution
of (2.11). Then
is stable.
T HEOREM 2.9. Let be a Lyapunov function associated with an equilibrium solution
of (2.11) satisfying
there exists
such that
for all
and all
1. for all
with
;
2. there exists a continuous function
with
for all
,
, and
for all
.
Then
is asymptotically stable.
We turn now to stability properties which are not associated with a particular solution.
Recall for the following that we assume that
is sufficiently smooth.
Moreover, we suppose that the interesting domain is sufficiently large.
T HEOREM 2.10. Let
satisfy a one-sided Lipschitz condition with
constant
, i.e. let
ç R PAéSUYPIYMêX
ö
ö
H
H
÷
ë
çO { ]Õ ð
çÚ{
èò{
ó ô
ó :
õ ?
ö #5% E '*õ 0 ^#
m
H M1
Au # E'*õ
M
Hu÷ #
ö ADï ÷ A
ö
ö
8 { à
: b H bF8
ë
ADï : ë M÷ H
M
ö
÷
ô
Òð ]ñM1 gOç ð Û
óß{Fô ó ï ô
M
H M
H Ù A i Y M1
A
ö
Iö + M H ö5
# õvø
~
õ ]Õ0
÷
{
E'Î)
v# F# õ
ö H b à
ë A õ ]Õ0
# õoø ~
M
Hu#h ÷!" { '*)
Ù #ù% ú'Ûõ 10j23
023 õ
Ù #% Ï 'õ
û #0
@
Ù H :hÙ ì1
: ì ^Fûa : ì @ for all j# and 3ìÎ# õ .
, then (2.11) is contractive. If û b , then (2.11) is exponentially contractive.
If û
ì
Proof. For two solutions
we have
?@ ¿M : ìM @@ of¿
(2.11),
:
Aì ¿M : ìM
Y
Ù
h
:
¿M Ù ìM1
¿M : ìM u"û : ìH @@ \
ETNA
Kent State University
etna@mcs.kent.edu
SPIN-STABILIZED DAE DISCRETIZATION
: ìH @@ , this relation reads ² OüaûV² M Setting ²
e.g., [17]) yields
@!ý
² R SYPIY ê X ² 393
and Gronwall’s lemma (see,
in both cases.
Ù #-% ('*õ 02 satisfy
Ù M1
A1
o"þ :Jÿ @@ for all ^# and # õ ,
with constants
þ i ï and ÿ { . Then the ODE (2.11) is dissipative with absorbing set
B
ÿ
í }
þ à for arbitrary à/{ .
Proof. Let be a solution of (2.11). Since
@? Y @@ Ù M
¿M
H1
EFþ :ÿ @@ T HEOREM 2.11. Let
Gronwall’s lemma yields
@
@ @
@
M @ F
þ ÿÎi R P Y @ : þ ÿ Fäúµ ~ ¿M @ þ ÿ such that
Hence,
í
@ Fäµ ~ M @ þ ÿ \
is positive invariant, i.e.,
M1 Ë u# í
Let
for all
jï" Ë # í \
Ë @a\
z + ê The estimate
@ @
¿M @ "þ ÿÎi RP Y z : þ ÿ Fþ ÿÎi à
finally gives
R P @ Y z @ : þ ÿ à
Ë
as condition on in Definition 2.5.
( '*õ 0 2 satisfy
for all ^# and # õ with @ {z .
} z i à for arbitrary à/{ .
Then the ODE (2.11) is dissipative with absorbing set í
Proof. A solution of (2.11) satisfies
@? Y @@ Ù M
¿M
H1
\
u#-0¿2 øjí , then Y @ b and therefore
If
M @ b äµ ~ ¿M @a z i àG for all { .
Ù #-%
Ù M
H1
b
T HEOREM 2.12. Let
ETNA
Kent State University
etna@mcs.kent.edu
394
P. KUNKEL AND V. MEHRMANN
Hence,
í
is positive invariant. Let
°|{Fäúµ ~ + ê Ë @· z i àG
Ë } [ ° . Because of íË Fí , we have 0,2 ø í Ë 4 0,2 øAí and therefore Y ¿M @@ b
and let í
, as long as MD# íË øí . Hence, í Ë is positive invariant as well. Moreover, íLË øí is compact
Ù ¿M
A11
M b on í&Ë øjí . Due to the continuity of Ù , there exists 8 { with
and
@
Y ¿M @ b :o8 on í&Ë øjí ¿Mu# í5Ë øjí . For IË Ï# î it then follows that
as long as
M1 Ë ^# í for all { Ë f ° @ : z i à @ 8 ,
Ë
with as required in Definition 2.5.
3. Stability results for DAEs. In this section we generalize the classical ODE stability
results that we have reviewed in Section 2.3 to DAEs. The key idea to obtain these analytical
results is to consider first the transformation to the reduced system (2.6) which has the same
solution set and consider the stability results in this framework. After this has been done we
then transform back to the original system.
3.1. Linear DAEs. We begin our analysis with linear DAEs (2.7) with variable coefficients. The stability analysis for such equations has been studied for systems of tractability
index up to in [14, 15, 16, 27, 39], we study here the general case.
In the case of linear DAEs, the reduced system has the form (2.8) with
ü
Î Ý 7 H
@? = Ý N
E¾ @ Å ¾ @¿¬Z
(3.1)
according to the notation of Section 2.2. For the homogeneous system
x H*
Ø9
3 M (3.2)
with consistent
ð Ë M1
where
given by
(3.3)
In particular,
, we then have an explicit representation of the solution ¿M Ý M 7 ØE@ Ñ e ? MB= ð Ë M1 Ñ Ý M ½ as
is a fundamental solution of the so-called inherent ODE associated with (2.7)
?oØg? e ?M
H?·\
ð Ë solves the linear matrix differential equation
£ £ Y ð Ë M1 Øg? e ? ð Ë V ð Ë M Ñ \
M1
of the homogeneous case (3.2), in the sense
It follows that the fundamental solution ð
M
j
that the solution can be written as
ð I , is given by
ð M1
Ý M 7 ØE@ Ñ e ?· L= ð Ë M1 gÑ Ý M ½ ETNA
Kent State University
etna@mcs.kent.edu
395
SPIN-STABILIZED DAE DISCRETIZATION
with
since
Ý
7 Ñ
ð @E Ø(@ e ?·MB= ð Ë M Ñ @ is pointwise orthogonal. Thus, we have
ð M
@ ï ð Ë @ and the implications
ð M 1
@@ ]Õ
Oç ð
ð M @ "ç R PAéSUYPIY ê X ð ËË MM @@ ]Õ
ç F
ð Ë M @ R PAéSYPIY ê X
ð
Fç
hold. From this, it is clear that for the different stability concepts to extend to DAEs it is
necessary that the inherent ODE (3.3) satisfies the corresponding stability concepts in the
classical sense.
On the other hand, since
@
ð @
@
Ñ
@
@
@
Ø(@ e ?·MB= @ ð Ë M1 @ ;ji ØE@ e ? @ ð Ë M @ 7
we have the implications
@
ð ËË M @E@ ]Õ
Oç Ø(Ø @@ ee ??·MM @@ Fû ð MM11m @@E]Â
! ;ji û ç ð
@
Fû
ð
ë
ð Ë M @ "ç R PAéSYPIYMêX Ø(@ e ?·M @ Oû M : "s ð M1 @ ç R Pé# SYPIYMê1X ï is an arbitrary integer and ç ë è
$
ë { are appropriate constants. We thus have
where $
obtained the following sufficient conditions.
T HEOREM 3.1. Consider system (2.7) and its reduced form (2.8) with inherent ODE
(3.3).
1. If the inherent ODE is stable and
holds with some constant
for all
, then (2.7) is stable in the sense that
on for some
positive constant .
holds for some
2. If the inherent ODE is asymptotically stable and
constant
for all
, then (2.7) is asymptotically stable in the sense that
as
.
"
3. If the inherent ODE is exponentially stable and
holds for
some constant
and integer $
for all
, then (2.7) is exponentially
#
on for some constants
.
stable in the sense that
B# ç
ë
Ø @ e ? M @ û
ë
ð b ç
Øg@ e ? @ û
û{ # û{ ]ñ B
ð M1 ]Õ
LØ @# e ? @ û M : ù
ï
û&{
ë
ë ë ð M b ç R P éSYPIY ê X ç 5
è {
3.2. Nonlinear DAEs. We turn now to the general case of a nonlinear DAE (1.1) with
corresponding reduced problem (2.6). As in the linear case, the unknowns are connected by
the transformation (3.1) such that it is again sufficient to study the reduced problem. Corresponding to the condition
for all
we require here that the function is
globally Lipschitz continuous on a sufficiently large domain for , i.e.,
o# Ð
Ø @? @ û
?
õ
Ð&M1
? : Ð&ì ? @ Fçg ? : ì ? @ for all j# and all ? 1ì ? # õ (3.4)
. It is then clear that stability and asymptotic stability of the
with some constant çÂ{
?
g
Ô
M
? carry over to the whole reduced DAE (2.6). In particular, we
inherent ODE
3? @ of (2.6).
have obtained the following result for an equilibrium solution
T HEOREM 3.2. Consider the nonlinear DAE (1.1) and its associated reduced system
(2.6) and assume that (3.4) holds.
ETNA
Kent State University
etna@mcs.kent.edu
396
P. KUNKEL AND V. MEHRMANN
ö M ? H@ IË ? fÔgM
? ,
1. If satisfies the assumptions of Theorem 2.8 for the inherent ODE
then
is stable in the sense of Definition 2.3 with
restricted to be consistent.
2. If satisfy the assumptions of Theorem 2.9 for the inherent ODE
,
then
is asymptotically stable in the sense of Definition 2.3 with restricted
to be consistent.
Contractivity and dissipativity for nonlinear DAEs have been studied for special cases in
[15, 16]. We now discuss the general case.
In view of Theorem 2.10 we first require that of the inherent ODE (2.6a) satisfies a
one-sided Lipschitz condition, i.e.,
ö M ? @ ?L>ÔgM
?
Ë Ô
@
ÔgM1
H?
: Ô(M1ì?VV
? : ìG? @ "ûa H? : ì? @ for all ^# and ?·ì?(# õ .
?·ì? of (3.3) and ² ?Mj ?· : ì? @@ , we obtain
Then for two solutions
@? Y ² ? M @? Y ? M : ì ? @@ ? M : ì ? ? M : ì ? @
ÔgM
? : Ô(ì ? M11
? M : ì ? @ Fû ? M : ì ? M @@ \
(3.5)
As in Section 2.3, by Gronwall’s lemma, the relation
² ? M ü·ûV² ? yields
@!ý
² ? R SYPIYMê1X ² ?·M \
M^ : ìM @@ H?·M : ìG?M @@ i I@a : ìa@a @@
Introducing ²
we obtain
@
M@ 1ì? @@
² M f ?? :: ìGìG??MM @@@ ii Ð&@ H?·
M? M: 1 ì: ?·MÐ&
@
f ;ji @ R @!ý SYPI Y ê X ? çM\
ç
²
and using (3.4),
Thus, we have shown the following result.
T HEOREM 3.3. Consider the nonlinear DAE (1.1) and its associated reduced system
(2.6). Let
satisfy a one-sided Lipschitz condition with constant
according to (3.5) and let
be Lipschitz continuous according to (3.4).
If
, then (2.6) is contractive in the sense that
is monotonically nonincreasing for two solutions
of (2.6). If
, then (2.6) is exponentially contractive in
the sense that
decays exponentially for two solutions
of (2.6).
To study dissipativity, we first require that
Ôò#O% Ï'&õ 1 0 Ð #% Ï'&õ 10 Ä Ì
: ìM @
û
b
31ì
û ¿M : ìM @
31ì
@
(3.6)
Ô(
?mV
? ^Oþ :Jÿ ? @ for all ^# and 5# õ ,
ï" and ÿ { . Then
with þ
@? Y ? @@ ? M1
? M Ô(
? 1
? u"þ :ÿ ? @@ and as in Theorem 2.11 we obtain
? u# } þ ÿÎi à for { Ë \
Ð
With the natural requirement that is bounded according to
(3.7)
H? @ b þ ÿBi à % I@ @ b'& for { Ë û #O0
ETNA
Kent State University
etna@mcs.kent.edu
where
&
and thus,
{ 397
SPIN-STABILIZED DAE DISCRETIZATION
à
@@ ? @@ i I@a @@ b þ ÿÎi à i& @
is a suitable constant depending on , we obtain
@
¿M @ # } [ þ ÿÎi à i(& for
{ Ë \
Thus, we have proved the following theorem.
T HEOREM 3.4. Consider the nonlinear DAE (1.1) and its associated reduced system
(2.6). Let
satisfy (3.6) and let
satisfy (3.4) and
(3.7). Then the DAE (2.6) is dissipative in the sense of Definition
2.5
with
restricted to be
&
consistent. An absorbing set is given by
for arbitrary
.
Finally, we assume that
Ô #f% 9'hõ 10 (3.8)
Ðk#f% |'hõ 10 Ä @ Ë B
ÿ
i
i
[
í }
þ
à
ÔgM1
? ? b for all ^# and ? # õ with ? @ {z .
As in Theorem 2.12 we obtain that
i )
?·^# } z (
for
à/{ { Ë and we can proceed as for (3.6), completing the proof of the following theorem.
T HEOREM 3.5. Consider the nonlinear DAE (1.1) and its associated reduced system
(2.6). Let
satisfy (3.8) and let
satisfy (3.4) and
(3.7). Then the DAE (2.6) is dissipative in the sense of Definition
2.5
with
restricted to be
&
consistent. An absorbing set is given by
for arbitrary
.
Recall that the domain must be sufficiently large to ensure that
does not leave the
domain of definition in finite time, i.e., one has to assume that the solution exists at least until
and that the desired absorbing set is contained in . Besides these technical assumptions we
can observe that also in the nonlinear case the various stability concepts for DAEs require the
corresponding properties to hold for the inherent ODE and sufficient conditions are obtained
under natural assumptions on the algebraic constraints.
Ô #f% 9'hõ 10 õ
Ðk#f%
@
í } [ z i à Ä
1
0
| 'hõ IË i @
à/{ õ
Ë
4. A test equation for DAEs. In this section we propose and investigate a new test
equation for differential-algebraic equations. As we have mentioned at the end of Section 2.2,
it is sufficient to consider strangeness-free DAEs. To get an idea how a suitable test equation
should look like, we must understand the reasons for the instabilities in Example 1.1.
Suppose that we discretize the linear homogeneous problem (3.2) with the implicit Euler
method, i.e.,
x d : c Ø(dZ
Id x d[
Id P ? d x dZ , ØEd¿Ø/Md , and Ad is an approximation
10,2 e 2to Md . If we scale the equation
where x
5
#
%
by a pointwise nonsingular matrix function
and the solution by a pointwise
#% ? 0,2 e 2Ü , then the
nonsingular matrix function Ý
transformed equation reads
ë ë
(4.1)
x ë Ø9 ¿ë where
ë
ë
x vÜ x9Ý Ø Ü Ø Ý : Üvx Ý Q
Î Ý ë \
d Ü d , Ý d Ý M d , Ý d Ý M d , and defining ë d by d Ý d ë d , we obtain
Setting Ü
x ë d : c Ø ë d : c x ë d Ý dP ? Ý d ë d x ë d Ý dP ? Ý d P ? ë d P ?·\
ETNA
Kent State University
etna@mcs.kent.edu
398
Since
P. KUNKEL AND V. MEHRMANN
i * @
Ý dP ? Ý d : c Ý d +
c , we can rewrite this as
ë d Ñ : dP ? d : Ø ë d ë d ë d Ñ : dP ? d i+* @ ë d P ?·\
x
Ac Ý Ý
c
x
cAÝ Ý
c
If we would directly discretize the equation (4.1), then we would instead obtain
x ë d : c Ø ë d ë d x ë d ë d P ?·\
ëd
Example 1.1 shows that these perturbations to x may have the effect that the numerical
method is unstable even though the DAE itself is asymptotically
ë d dP ? d stable. Obviously, to have
an effect on the solution behavior, the perturbation c x Ý
Ý must be
3? reasonably large.
In order to simulate this behavior in a test equation, we consider for
the classical test
equation (1.3), which is (allowing here as usual for complex solutions) asymptotically stable if ,
. Moreover, since we solve DAEs by discretizing a numerically available
strangeness-free formulation, it is sufficient that the test equation is also strangeness-free.
As we have seen in Section 3, we still obtain asymptotic stability if in (2.6) the entry
is bounded, e.g.,
. This corresponds to the pair of matrix functions
RZpI b ØE@ e ?
Øg@ e ?Mj :v;
3x Ë o/ËØ .- 7 ; = 7 :vp ; ; =0/ \
M is changing and, therefore, to have a
In order to simulate the effect that the kernel of x
nontrivial transformation with a derivative that depends on a parameter that can be used to
control the rate of change, we will choose
7 ;Ét ;
,
(4.2)
t
¿Ë o(ËØ to
with a real parameter , to transform x
x Ø( 1x Ë , P ? DËØ , P ? :
= ?
x Ë ² ² , P \
A simple calcultation yields
7 ;s:ut ¤Ø9 7 p t ;D: p \
L
:v; j; iht =
=
x
In the following we, therefore, consider the test equation
7L;s:ut 7 H
? 7 p t ;D: p 7 H? \
:v; ;jiht = I@=
= I
@=
(4.3)
?·[ ; , A@a[ ; , equation (4.3) has the solution
With initial data
¿M 7 ; t ; = 7 R3R 22 YY = 7 ;jihR t 2 Y R2 Y = [pA b and t arbitrary. In particular, asymptotic
which is asymptotically stable for 465 t
stability of (4.3) does not depend on . Note that all transformations of such that the
]ñ
transforming matrix function and its pointwise inverse are polynomially bounded for
preserve the asymptotic stability of the solution.
ETNA
Kent State University
etna@mcs.kent.edu
399
SPIN-STABILIZED DAE DISCRETIZATION
Since we will need it later in the course of this paper, we describe the transformation of
(4.3) to the reduced form corresponding to (2.8). With
(4.4)
Ý M
;
t
7 ; t
7 :ut ;
B
;jiht @ @ :ut ; = Ý ;jiht @ @ 798 @ v: ; :ut = according to (3.1) we obtain that
;
;jiwt
;
;jiwt
7 ;jiht @ @ 7 p :t @ i p t
:v;^:t :&t
=
@@ @
@@
@ ; = Ø( is equivalent to the
and thus, by scaling with a diagonal matrix from the left, the pair x
x9Ý Ø Ý : x Ý pair
@@
7 p : ? @0@ A Y
x ë Ø(ë ;:=< ; ?
i tw
i t A Y @ A @ v: ; =0B > ;jw
(4.5)
which is the required reduced form (2.8) of the test equation (4.3). Since the pointwise
orthogonal transformation does not alter the asymptotic stability of the solution, the inherent
ODE of (4.5) is asymptotically stable and part 3 of Theorem 3.1 applies.
Note that there is an important difference between this new test equation and the standard
test equation (1.3) for ODEs. Due to the requirement that the new test equation must involve
a changing kernel of , it cannot be autonomous. As a consequence, the difference equation
for the numerical solution which is typically obtained by discretization will explicitly include
time positions.
in (4.2) is not pointwise orthogonal. An
R EMARK 4.1. It should be noted that ,
orthogonal variation of this transformation would be to choose
x
M
;
7s;
;jiht @ @ :ut t
or the case of a rotation with frequency
Ë, Mj 7 : â㶠t t FCCDEDE
tt
âU¶
Ë M
,
t
; =
\
=
The problem with these two orthogonal transformations is that the analysis of the stability
regions of different numerical methods becomes very technical analytically. Numerical tests,
however, show that there is no essential difference in the corresponding stability regions.
5. DAE integration methods and DAE stability functions. To demonstrate the properties of the test equation (4.3) let us apply some of the well-known DAE integration methods
to this equation. In analogy to the classical stability functions ,
,
for ODEs
G
(see [13]), we will introduce DAE stability functions of the form ,
,
, usG
ing the abbreviations
,
. We will present6several
plots
of
stability
functions.
H H
G
In all cases the plots depict the region given by
. The color coding is chosen
G
so that the dark regions are those with ,
and the shading is according to the
G
modulus of ,
.
c p À c t
(
(u#h : ¬ @
n ( nD ;
c Ip - c p c t D (
ETNA
Kent State University
etna@mcs.kent.edu
400
P. KUNKEL AND V. MEHRMANN
5.1. Implicit Euler method. Applying the implicit Euler method to the test equation
(4.3), we obtain the iteration
7 ;D: p u: t d :&t h
7 ;s:ut d 7 H
? e d ?
i t p d 7 H
? e d
:v; c
j; iwc t d c = I
@ e d/= = I@ e d PP ? = \
The coefficient matrix on the left side has determinant
and, thus, for
I
K ;D: c [ p iht Iù
the linear system has a unique solution given by
7 ? e d ; 7 ;jiht d t d iht c :t c p d 7 ;s:ut d 7 H? e d P ?
;
;D: c p
= = I@ e d P ? =
A@ e dV= I
;
L
7
j
;
h
i
t
:
u
t
j
;
w
i
t
7
d
d1
dZ
? ed ?
I
;
u: t d
= @ e d PP ? = \
H? e d P ?oN ;jiwt d P ?V
I@ e d P ? , we obtain
Since
7 ? e d ; 7 ;jiht d :ut d ;jiwt d 7 ;jiwt d P ?V
I@ e d P ?
;
:ut d
=
=
A@ e d= I
A@ e d P ?
;
7
o
;
:
t
j
;
w
i
t
I ;Dc :V t d[ = I@ e d P ?
c ;jiht
D
;
:
t
7
d 7 H? e d ?
;D: Zp iwc t ; = I@ e d PP ?=
c d
D
;
&
:
t
- ;D: [p i c t / 7 ;jih; t d = 7 A@? ee = \
.
c
We see that the stability behavior of the equation depends on the DAE stability function
,
G( D; : ;u: : G
G
\
GñÕ
G( reduces to the stability function
the DAE stability function , f ;D: P ? of the
ODE case. A plot of this function is given in Figure 5.1.
Note that for
,
5.2. Radau IIa method with two stages. Applying the 2-stage Radau IIa method (see,
e.g., [13]) given by the Butcher tableau
? ?@ : ? ? @
; KJ7 K?
?
7
7
K
to (4.3), we obtain the iteration
? e d ? e d P ? i K7 c
A@ e d A
@ e d P ? i K7 c
where the stage values and derivatives satisfy
K
? ó ? e ? ii K? c ó @ e ?
ó ? e @ K c ó @ e @·
ó ? e ? :&t d P ? iML7 ó ? e @(p ó ? e ? iht ;D: p M d P ? iML7 ó ? e @
ETNA
Kent State University
etna@mcs.kent.edu
401
SPIN-STABILIZED DAE DISCRETIZATION
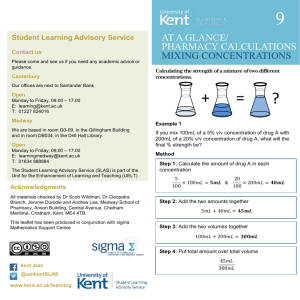
F IG . 5.1. DAE stability function for the implicit Euler method for
NPO3QSRTVU1W XZY[Q\Y9]P^
Ï : ó ? e ? i ;jiht d P ? iML7 1 ó ? e @a
: t d @ e @ p @ e ? iwt ;D: pdZ @ e @ ó @ e?
ó Ï : ó @ e ? i ;jiht dZ ó @ e @ ó i
ó ? :
e
e
d
e
?
u
?
?
?
?
?
?
@
?@ c ó @ e ?
P
J c ó
ó
? ó ? e @o
A@ e d P ? ii ?J @ c ó ? e @ i : ? ?@ c ó @ e @
ó @ e ? ? e d P ? K7 c ó ? e ? i K? c ó @ e ? ó @ e @o
A@ e d P ? i K7 c ó ? e @ K c ó @ e @\
? e d P ? ;oiOt d P ? @ e d P ?
@ ed P ?
Since the Radau IIa methods are stiffly accurate, they yield consistent approximations. Using therefore
shows that all quantities are multiples of
.
Gaussian elimination and simplification finally leads to
@ e d ó @ e @ :
üc
üp t&ü c i t c p pIi @ üa:bc ta : thc :`p a :`_p ic @ e d P ? \
c
c
c
c
Thus, the DAE stability function for the 2-stage Radau IIa method reads
,
: aG i ü : ü G \
G( cÃ:`cÃa `
:`a G i @ i ü G
A plot of this function is given in Figure 5.2.
ETNA
Kent State University
etna@mcs.kent.edu
402
P. KUNKEL AND V. MEHRMANN
F IG . 5.2. DAE stability function for the Radau IIa method with two stages for
;
NPO3QdRTeU=W XZY[Q\Y9]f^
5.3. Projected implicit midpoint rule. Applying the implicit midpoint rule, i.e., the
Gauß method with g
, given by the Butcher tableau
@? @?
;
(see [13]) to (4.3), we obtain the following iteration for the stage values and stage derivatives
? p
ó ? :&t d P ? i @ c ó 9@(
: óó
ó ?oO
d P
ó @(O
d P
Ide ? O
Ad P
de @(O
d P
i t ;D: p3 d P ? i
?w
? i ;^iwt Md P ? i
? e ? i @? c ó ?
? e @ i @? c ó @·
? e? i c ó ? ? e @ i c ó @\
Elimination of the stage values gives the linear system
7 D; : ?
@
@? c p u: t M d P ? i ? @? c : @? c t ;^: p? M d P ? i @? c 1
: @ c ;jiht d P ? i @ c c
7 p
d :vP ;? e ?i ih ;^t iw ;Dt : M pd M ? d P i
P
@? ? c ó @a
@ c 1 ó @ 7 ó?
= ó? @ =
? ? i @ c 1
d P ? e @ \
@ c d P ? e @ =
ETNA
Kent State University
etna@mcs.kent.edu
403
SPIN-STABILIZED DAE DISCRETIZATION
F IG . 5.3. DAE stability function for the projected implicit midpoint rule for
? e d P ?L ;oiOt d P ?
I@ e d P ?
NPO3QSRTVU=W XZY[Q\Y9]f^
@ e d (
I@ e d P ?
Using
and, hence, assuming that we work with consistent apG
proximations (e.g., by projecting in every step), one derives that
with
,
,
(5.1)
Gg ü i: ::
ü G
G
\
A plot of this function is given in Figure 5.3.
5.4. Projected implicit trapezoidal rule. Applying the implicit trapezoidal rule, i.e.,
the 2-stage Lobatto method (see [13]) given by the Butcher tableau
? ?
; @ @
@? @?
to (4.3), we obtain the relations
ó ? e ? :&t d P ? ó ? e Ï@ p: ó ? ? e e? ? iwi t ;j ;Diw: t pdd P ? ? ó ? ?e @ e @ @ e ? :&t d @ e @Ep ó @ e ? iwt ;D: p P d ó @ e @·
ó
ó Ï : ó @ e ? i ;jiwt d ó @ e @·
ó
H? ó e d P ?
ó ?? ee @E?D
ó I@ e d P ?
ETNA
Kent State University
etna@mcs.kent.edu
404
P. KUNKEL AND V. MEHRMANN
F IG . 5.4. DAE stability function for the projected implicit trapezoidal rule for
;(it d P ?V
I@ e d P ?
A
@ e d ó @ e @E
NfO3QSRTVUhW XZY[QiY9]f^
? ? ó @ e ? ? e d P ? ii @? c ó ? e ? ii @? c ó @ e ? ó @ e @E
I@ e d P ? @ c ó ? e @ @ c ó @ e @
? ed P ? for the stage values and derivatives. Eliminating the stage values and using as before
under the assumption that we work with consistent approximations, we
G
,
obtain that
with
(
A@ e d P ?
, G( ü i : : G : : G G \
ü A plot of this function is given in Figure 5.4.
In the following sections we consider classes of numerical methods which are common
in the treatment of DAEs in order to show the typical structure of the corresponding DAE
stability functions.
5.5. Stiffly accurate Runge-Kutta methods. Applying a general stiffly accurate
Runge-Kutta method (see [13]) given by the Butcher tableau
û
with j
(5.2)
k
j
? Rg ; ÃR ; ½ ; ¬
P
invertible and ½ j
,
m
to (4.3), we obtain the relations
e ? :&t d P ? i e @ p e ½ ? i t ;u: p3d P ? i 1 e @ ó l
1
ûml
c hó l u : ó1l e ? i ;jiwt Md ? i û9l
c ó1le @ (a)
(b)
H? e d P ó1? l i conqrtp s ? ± l e r ó P r e ? û9l
c ó1l
(c)
ó l ee @E?Dh
(d)
ó l h
I@ e d P ? i c n rtp s ? ± l e r ó r e @a
k
ETNA
Kent State University
etna@mcs.kent.edu
SPIN-STABILIZED DAE DISCRETIZATION
405
; m\\m\V g . Obviously, all stage values are consistent due to
ó l e ?Df ;uiht d P ? i û l c 1 ó l e @a
? e d P ? > ;oiÛt d P ? @ e d P ? . Using the vectors
and so all numerical approximations due to
of stage values and derivatives defined by
ó ? e ?
ó ? e @ ó ? e ? ó ? e @
ó ?D ... e ó @E ... e ó ?D ... ó @E ... ó p?
ó p@
ó p e?
ó p e@
the relations (5.2c,d) yield
?D ? P ? ? : R
H? e d P ?m @E ? P ? @ : R
I@ e d P ?V\
L j
L j
ó
ó
ó
ó
? @
Eliminating then ó , ó
in (5.2a) and multiplying by c gives
t 1Ë ?
?P ? : R
? e d ? :
P ? ó @ : R
@ e d P ? ..
P
j
ó
j
.
t Ë
t ;D: pp 1Ë ?
p ó ? i
@
..
ó
.
t ;D: p Ë p
Ë d P ? i û l c , u ; m\\\ g . Utilizing finally the consistency relations,
with l
we obtain the
for u
linear equation
? e? : :
@³ e ?³ ;ji G/ û ?
..
.
j
;
i
³ e ? G/ û ?
G
? e @ ;ji G9 @ : ?V1\\m\
: û
@ ³ ³ @ e @ : û : G û \\m\
.
: û 1 ³ e @ j; i G9 û @ : û .m.
p
p
p
³ @? ee p ;j;jii G9G9 û p :: û @m?V11 ó @? ee @@
³ p
û û
ó .
.. p
.. e @
. :
:
e
G
³pp
ó
p
² @? ;D;D:: û @?vG(G(
I
@@ pee dd P ??
P û
Ì ²
.
;D: ..
G(
@ e d P ?
²p ûp
? e
i
i
e
e
e
d
e
?
A
@
@
P
with j
³ l r Ggand
m ³ l p . Since
ó G(p , this in particular shows
e
d
I
@
I@ e d ²P l ? with³ l a rational
that
,
stability function , only depending on the
parameters defining the Runge-Kutta method.
;
? e d : ? e d P ? "
: t M d :
c
p H? e d i
9 : ? e d i
5.6. Gauß-Lobatto methods. Applying the Gauß-Lobatto method collocation method
(see [23, 24]) with $
to (4.3), we obtain the iteration
:&t d : @? c : t d P
d P ?V &
which yields
;jiwt d ;jiwt
I@ e d : I@ e d P ?
@? c ? e d P ? ihc t ;D: pM d : ? 1 A@ e d i A@ e d P ? @c
ü ;jiwt d[
@ e d
ü
: @? c ? 3p ;jih? t d : @? c
? i @ c i @ c p¿ ;jiht
t D; :
d P ?
p3 d :
i @? c t
@? c A@ e d ?
;D: p3 d P ? : @ c A
@ e d P ?·\
ETNA
Kent State University
etna@mcs.kent.edu
406
P. KUNKEL AND V. MEHRMANN
F IG . 5.5. DAE stability function for the Gauß-Lobatto method with
Simplifying the bracketed expressions, we obtain
ity function
,
@ e d wyx{z
NPO3QdRTVU1W XZY[Q\Y9]f^
for
G(
I@ e d P ?
,
with the DAE stabil-
G( a(avi: ü :: GG \
ü A plot of this function is given in Figure 5.5.
For the general Gauß-Lobatto collocation method applied to (4.3), we obtain the relations
;
|"
r}s
|"
e Zp
l r
~
r}s
ó r e ? iwt ;D: pM d P ? i z l c 1 ó r e @
: ó l e ? i ;^iwt M l P ? i l c 1 ó l e @g
; \m\\V $ . Here, z ?m\\\ z " denote the Gauß nodes and m\\m\ " the Lobatto nodes
for u
with the corresponding number
the Lagrange polynomials in the
r of stages. Ife r ç r denote
e
r
r z l for \m\\V $ . Furthermore,
l
l
l
Lobatto
nodes,
then
and
³
ç
z
ç
I@ e d ó " e @ , ó me ?hÕ
? e d P ? , and ó e @ ~ ß
A@ e d P ? . Since these methods yield consistent
? e d P ?9 ;DiÛt d P ?
I@ e d P ? . Combining all these, we obtain
approximations, we have that
c
e e ? :t M d P ? i z l c ó r e @ :
³lr ó r
the formulation
| " er
³[l
r}s :
~
e Ap e ? :
l rc ó r
|"
et
[l r
³
r}s
Md P ? i zl
c i
er
~ l c
t ;D: p Md P ? i zl
c 1 i
ó r e @
ETNA
Kent State University
etna@mcs.kent.edu
407
SPIN-STABILIZED DAE DISCRETIZATION
which is equivalent to
| " er
³l
r}s
:
[p iwt i ³ l e r c t r : z l : l e r c t c p3 r : z l i
ó r e @(\
~
e @ ; \m\\V $ , satisfy a linear system of equaThe latter relation shows that the values ó r ,
me @E
A@ e d P ? . Moreover, besides the quantions with a right hand side containing the factor ó
G(
tities
contains coefficients describing the specific method. Hence,
I@ e d , G(the
Arelation
@ e d P ? withonly
G( .
a rational stability function , er
~ l c
5.7. BDF methods. Applying a BDF method (see, e.g., [2, 13]) to (4.3), we obtain the
iteration
;
c
|"
r}s
þ
" P r H?
e d P r :t d ;
c
|"
r}s
I
@ e d
p
H? e d iwt ;D: p d I@ e d þ "Pr Pr
Ï : ? e d i ;jiht dZ
@ e d\
Due to the latter relation, the BDF method yields consistent approximations. Utilizing, therefore, that all past approximations are consistent, we obtain
|"
r}s
: t dM‹
@ e d P r N
U ;jiht d P r &
c p ;jiwt dZ i c t ;D: pd¬ @ e d1\
þ "Pr
On an equidistant grid, this yields the homogeneous difference equation
þ " : c pA
A@ e d i
|"
r}s
;D: t A@ e d P r \
? þ " P r [ c
Requiring that all solutions of the difference equations are bounded is equivalent to requiring
that the associated polynomial
þ " : c Ap z d i
|"
r}s
d r \
þ? " P r ;D: [ c t z P satisfies the so-called root condition, namely that all roots are bounded by one in modulus
and those of modulus one are simple; see again [2, 13]. Note that this property only depends
G
G
on
. The dark regions in Figure 5.6 for $
are those points
where the root
condition holds. The shading is related to the largest modulus of the roots.
(
ü
(
5.8. Summary of DAE stability functions. Table 5.1 summarizes all DAE stability
functions that we have obtained by applying classical DAE one-step methods to the test equation (4.3). Moreover, we have included some DAE stability functions for higher order methods which were obtained with the help of the formula manipulation package MAPLE. Note
also that methods which do not yield consistent numerical approximations are considered
together with projection.
G
Obviously, for
the obtained DAE stability function reduces to the classical stability function for this method applied to the standard test function (1.3) for ODEs. As
describes eigenvalues in the system, one is interested in complex values of
. Of
course, the above results are still valid for a parameter
. Instead of the plots given in
the previous sections, we can think of stability regions in the complex -plane parameterized
>
#Ûr
cp
p
ETNA
Kent State University
etna@mcs.kent.edu
408
P. KUNKEL AND V. MEHRMANN
F IG . 5.6. DAE stability function for the BDF method with
wyx
for
NPO3QSRTeU=W XZY[Q\Y9]P^
G
by a real parameter . Such objects can be visualized by movies. For the methods discussed
here such movies can be found in the supplement of this paper,
http://etna.math.kent.edu/vol.26.2007/pp385-420.dir/stab.html
ä #À :6H H ¬
GÕ#
\
They
with the time running over
show the -plane in the range 45
.
Comparing the stability domains of the various methods, one recognizes that they behave
G
differently with the sign of . In the case of a negative eigenvalue in (4.3), the Radau IIa
G
method with g
for example
G stays stable for arbitrary negative but may exhibit difficulties for a certain positive , whereas for the Gauß-Lobatto method with $
it is just
the other way around. It remains, however, unclear how this behavior can be exploited in
applications.
: ¬
p
ü
;
xË
xË
6. Spin-stabilized discretizations. As we have seen in Section 4, numerical schemes
may become unstable when they are applied to DAEs with a spinning kernel of , where
in general is the linearization of a reduced formulation (2.10) of the given DAE (1.1) with
respect to , i.e.,
7 ? M ¿M3¿
\
=
x Ë Mj » ½ + . Ñ ( ¬ Ý ½ Ý C ò
Ý
In particular, we expect such effects, when the transformation involved in (2.9) yields a
large term
. Example 1.1 for
shows that discretizing a given DAE with
the implicit Euler method actually results in discretizing the inherent ODE with the explicit
ETNA
Kent State University
etna@mcs.kent.edu
SPIN-STABILIZED DAE DISCRETIZATION
TABLE 5.1
DAE stability functions
Method
DAE-stability function ,
Implicit Euler
,
,
,
Radau IIa g
ü
Radau IIa g
_
,
Implicit midpoint rule
Gauß g
;D:
ü
Gauß-Lobatto $
Gauß-Lobatto $
,
;
,
ü
,
Implicit trapezoidal rule
,
409
G(
G( D; : : G G
cÃ:`a G i : G
G( cÃ:`a :a G ü i @ ü i G
ü c `
:
_Ec G i a :F; G i(_ @
: _ @G
G( c `
ü
: _Ec G `
: _Ec i; G iH @ : 7 :`_ @ G
G( ü i: :: GG
ü; `
:
cG (
i c b
: a G i @
G( ; ü `
: c i ü G i @
üa(i : c G :
G( av: ü : GG
ü a(i; : G i @ : @ G
G( ü av:"; ü : ü G i ü @ i @ G
ü i :ü : ü ü G( ü : G : G G
ü Euler method. If in such a case the inherent ODE is stiff, then it is necessary to apply stable
discretization methods. A possibility to overcome these difficulties would be to determine a
smooth transformation to get rid of the spinning kernel. Although this could be performed
numerically (see, e.g., [3, 6, 18, 32, 40] or [21, Cor. 3.10]), such a procedure in general would
be too costly. In the following, we therefore present an alternative approach.
As in the treatment of stiff ODEs, where it is assumed that the stiffness is contained in
the linearized equation, we assume that the spin-effect is covered by the linearization of .
The idea then is to use a linear approximation
Ý
Ý
e
ë
ë
ë ë
Ý Ý 1Ë i M : Ë Ý Ý #*0 2 2 ^Ë # fixed such that in the l -th step of a $ -step method with stepsize c
@
ë
ë Ý : Ý M * c Ý : Ý Mj * c (6.2)
^#J d1dU " ¬ with small constants in the remainder terms. We then use this linear
holds for all
(6.1)
approximation to transform the given DAE before we discretize it. A possible choice is given
by
ë Mj dU " i : dã " ë ë ; dU " : Mdã " P ? 1\
Ý
Ý
Ý Ý c Ý
Ý
(6.3)
In the numerical computations, one must be aware that Ý is not unique and that we therefore
do not get a smooth representation of Ý . The selection can be made uniquedã by freezing the
M " say by QRpivoting and all other decisions performed during the computation of Ý
U
d
m
?
"P .
decomposition, when we determine Ý
ETNA
Kent State University
etna@mcs.kent.edu
410
P. KUNKEL AND V. MEHRMANN
ë
Ý
1
(
Ø
Ý ?· @E]_
·? @Ã#w d dã x ¬
@ : o? ? @
? 7 ;jiwt ? 7 ; i* e áã âãA ä åÏæ x @ Ý ë @ Ý ë ? P
; =
Ã=
c
ª
In the stability analysis of the resulting numerical methods we will make use of the
following properties of the linear transformation described by .
L EMMA 6.1. Let satisfy (6.1) with (6.2) and let
be the matrix
* functions of the
" and
test equation (4.3). For
with
, the constants
here and in (6.2) being independent of , the limits
ë
and
c @
? 7¿;jiwt ? A7 t i* ë ë
; =
=
L
á ª UâãåÏä æ x ?m Ý Ý ?m!P
c
hold.
Proof. The properties (6.2) imply that
? @ i* @ V ? i+* @ 1 P ?
ë ë
Ý @ Ý ?m P ? N
i Ý @ : ? Ý c ? i+Ý * c @ 1V Ý c ? i+* c @ P ?
Ý
Ñ i @ : ?m Ý ? Ý ? P ? i+* c @ and
? @ ? ?
ë ë
Ý Ý ? !P Ý ? i+* c 1 V Ý ? i+* c 1!P Ý ? Ý ? !P i+* c V
where
m? ?m!P ? j; iwt t @ @ 7 :v ; ; =
Ý Ý
?
@ and x ? , respectively, from the left gives
by a simple calculation. Multiplying with x
ë @ ë ? P ? 7Ò; :ut @ = i @ : ? ;jiwt t @ @ 7Ht @ Ã; = i* @ @
x Ý Ý
c
?
and
t
7t ? ;
?
ë ë
x ? Ý Ý ?P ;jiht @ ? @ = i+* c such that
ë @ ë ? P ? Ò7 ;jih; t ? =
@
x Ý Ý
;D
: t @ : m? i @ : ? ?
7
and
@
@ AA
ª
;jiht @ iht @ ? @ @
= i * c @ @
ë ë ? P ? 7 j; ih; t ? = j; iht t @ @ 7 ;jiwt ? iht ? = i * c \
?
x Ý Ý
?
The limits are then obvious.
According to [21], we are allowed to restrict ourselves to the case of strangeness-free
DAEs. In the following we also concentrate mainly on linear problems.
ETNA
Kent State University
etna@mcs.kent.edu
411
SPIN-STABILIZED DAE DISCRETIZATION
6.1. A general convergence result. In the following, we study the convergence properties of methods that are obtained by including a transformation before a given convergent
method is applied. We use the notation of [21, Ch. 5] but have to slightly modify the general
approach given there. As usual we restrict ourselves to equidistant grids.
Let
represent the numerical approximation and let
represent the corresponding
true solution at time
. We start with a basic numerical method given by
ëd
Ïë d d i lc
ë
(6.4)
dU ?o jë d ë d c representing any classical integration method for DAEs. We assume that (6.4) is consistent
of order according to
¢ ?
ë
ë ë
v dU ?m : M d Ï d V c g % c
(6.5)
and stable according to
ë ë
ë ë
ë
ë
dU ? j d ÏMd c : jM d1 od c g ;ji c v d ÏMd : od \
d
In the latter estimate, the quantities are matrices which are required to satisfy
d ? dP ? ( & (a)
v
i * c V\
dU ? dP Ñ +
(6.7)
(b)
Moreover, all involved constants are assumed to be independent of l and c . Then, the estimate
dU ? Ïë dU ? : oë dU ?
dU ? Ïë dU ? : jë d Ãë d V c i jë M d vë M d c : ë dã ?V
ë
ë
& v % ¢ ? i ;ji
c
c d ÏdZ : od
(6.6)
holds and, hence, the method is convergent.
With the help of this basic method, we define a new method by applying in each step first
a transformation, then the integration step by the basic method in the transformed system, and
finally a back-transformation. Thus, the so obtained new method has the form
with
jM d
d
dU ?D!j d d c d c ' dã ? jë d dP ? d c \
The quantities
will describe the mentioned spin-stabilization but at the moment they may
represent any suitable transformations. Note that we omit a subscript although is defined
differently in each integration step. According to (6.7) we require that
l
& Ld d P ?
?
g
+
i
dU ?v d P Ñ * V\
(6.8)
c
?
?
ë d ' d P d
Ïë d '
dP Ï d , we then have that
With the relations
and
ÏMdã ? Ï: Mj dã?dÏ: M d[Vdã c ? ^ë M d dP ? ÏM d V dã ? vë M dã ?m : dã ? jë M d Ïë d V
c ¢ ?
c
ë
ë ë
f dU ? D v dU ?m : jM d Ï d V c g & % c
(a)
(b)
ETNA
Kent State University
etna@mcs.kent.edu
412
and that
P. KUNKEL AND V. MEHRMANN
?
v ãd ?9 dãP ? dã j? M jë d ÏdÏë d VMdc : ^: M jë d M d1d oë c d1
c
?
ë c ë
j; i c v d ÏM d : d c ;ji c v d dP S ÏM d : d \
Hence, if the basic method is convergent, then the new method that first transforms, then
applies the basic method, and finally transforms back is convergent as well.
In the special case of the DAE integration methods that we will consider together with
the spin-stabilization according to (6.1) for the transformations, we will be in the situation
that
ãd " P ?
dã " P @
od3
...
Ad
(6.9)
and
¿M dã " P ?m
¿M dã " P @ ÏMd
..
.dZ
ë
Ý M dã " P ?m ë M dã @ Ý "P
d
l
Ý M
..
ë
Ý M d
.
ë
Ý
where we again omit a subscript at , which also differs from step to step. Since we stay
close to a (continuous) path
of orthogonal matrices on a compact interval when we deal
with convergence, it is clear that the properties
(6.8) hold.
The numerical method given by in (6.4) is then applied to integrate the transformed
DAE with coefficient functions
ë
ë
ë Ø ë Ø ë :
x x Ý
Ý x
ë
Ý \
In the following section we discuss the spin-stabilization approach for two classes of standard
DAE integrators.
6.2. Spin-stabilized stiffly accurate Runge-Kutta methods. In this section we discuss the use of spin-stabilization within stiffly accurate Runge-Kutta methods possessing an
invertible coefficient matrix j . For this, let a linear DAE (2.7) be given which is already
strangeness-free such that we do not need to perform an index reduction.
A Runge-Kutta method for the integration of (2.7) has the form
(a)
(b)
(c)
(6.10)
with
dU ?Ò
d i conqlp s ? ÿ l ó l Id i c n r}p s ? þl e r ó r ó1 l xl 1ó l Ø ló1l iÛÙ l u
u
; \\m\V g ; \\m\V g x l x M d i è l c ¤Ø l Ø9M d i è l c V Ù l Ù d i è l c \
For convenience, we use the short hand notation
â µ x l
x ?
..
.
x
p
Ù ?
Ù
CD á l Ù ...
p
ETNA
Kent State University
etna@mcs.kent.edu
SPIN-STABILIZED DAE DISCRETIZATION
413
which also applies to other arguments. Using the Kronecker product, as it is common in the
treatment of Runge-Kutta methods, we can solve (6.10b) according to
; ?
ó c j P Ñ 2 V ó : [R IdV
!CD á ó l and ó
CD á ó l . Writing (6.10c) as
where ó
[Ø i CD Ù âãµ x l ó
âãµ l ó
á l
we can eliminate ó to obtain
V P ? Ñ 2 V : R d 1 Ø i CD Ù âãµ x l j
ó
c â µ l ó c á l
âãµ x l V j P ? Ñ 2 ãâ µ
and thus
: c âãµ [? Ø l ¬ ó
x l V j P Ñ 2 V R
d i c CD á Ù l \
Observing that the leading matrix is invertible for sufficiently small c and that the numerical
dU ? is given by the last block entry of ó in the case of stiffly accurate Runge-Kutta
solution
schemes, we obtain
dU ?E [R ½ Ñ 2 âãµ x l V j P ? Ñ 2 : ? c âãµ [Ø l ¬ P ?
p
â µ x l j P Ñ 2 V[R d i c CD á Ù l ¬
R fm m ; ¬ ½ #0 p . In view of (6.6), we must consider the matrix
where
p
?
?
÷ [R ½p Ñ 2 âãµ x l V j P Ñ 2 : c âãµ [Ø l ¬ P â µ x l ² Ñ 2 V
j P ? R as in Section 5.5. Let Ü l Ý l denote matrices that transform x l Ø l to
where ²
Weierstraß canonical form (see [2, 21]) according to
7 Ñ Ø
7 %l \
Û= Ü l l Ý l
ÑÄ =
Ü lx lÝ l
(6.11)
Then
÷
can be represented as
÷ NR ½p
(6.12)
Ñ 2 â µ Ý l ?
?
âãµ Ülmxy l V j P Ñ 2 âãµ Ý l P ? : V c â µÑ V %Ü \ l Ø l Ý l ¬ P
âãµ Ü l x l Ý l â µ Ý l ² 2
Ü l x l has already a vanishing second block row, we see that
?
â µ %Ü lmxl V ? j e ? P ? ? Ñ 2 ? : â µ ? Ý Ø l ? : ? c âãµ Ü%l Ø lÝ l ? e ? ?
³ Ü x Ý cIÜ Ý m
³ pÜ x Ý p
..
..
..
.
.
.:
e
e
Ø
?
?
Ü p * x p Ý p * cI Ü p p Ý p
?³ e ?Ñ ³ : p c Ü %Dp ? x p Ý m m³ ? e ?³ Ñ p p i
: c Ñ Ä m
c
c
\
..
..
..
..
..
.
.
.
.
.
e ?Ñ +
³ p i * c * c m ³ p e p Ñ : c % p : Ñ Ä
m
c
Utilizing that
ETNA
Kent State University
etna@mcs.kent.edu
414
P. KUNKEL AND V. MEHRMANN
The inverse of this matrix must be applied to
7 Ñ â µ Ü l x l Ý l ãâ µ ¡V¢¡ = \
* c
: c mÑ Ä ³ e ÑÄ
÷
?
?
?
÷ [R ½p [ R Ñ 2 Ñ âãVµ 1 Ý l V Ñ1 j Pi+* Ñ 2 1 i+* £ ¡3c 1 P â µ P £? ¡3 â µ Ñ Ý l P\ ² Ñ 2 Ý p ½p 2 j 2
c â µ
â µ Ý l ² 2
Observing, furthermore, that
£¡3 P ? Ñ 2 £¡3 P ? 0CD P ? i* â µ â µ £ ¡3Ý l ² Ñ CD â µP ? i+* â µ 1jÝ f
l á Ñ ²l Ý lmÝ £¡30CD Ñ c i+* P ? â µ
â µ ² l 2 á Ý
c
² 2 âãµ
á 2
c Ý
d
9
Ø
M
d
with Ý belonging to the transformation
of x
to Weierstraß canonical form and
R
R ½ j¤j P ? R( ; , we finally
arrive at
using that ½ j9²
p
Ñ p
i * c ² Ñ 2 â µ £¡30CD á Ñ ? 2 i+* c 1 Ý P ?
2
÷ Ý p [1R R ½p Ñ 2 Ñ j +
i * 1 £ ¡30 CD á [Ñ 2 '
i * 1 P
i jÏ*² c 2 âãµ ¡30c CD á [â Ñ µ 2 i * c Ý P ? \ c Ý
ÝÝ p [Ñ 2 ½p Because of its zero block rows, in (6.12) we can replace the entries consisting only of
by zero and the entries
by [l r without altering the resulting . Hence,
p
d Ý P ? dU ? Ý P ? \
p
Comparing with (6.6) we have stability with
Together with the known consistency, we get convergence of any transformation method that
is based on stiffly accurate Runge-Kutta methods, in particular of the spin-stabilized stiffly
accurate Runge-Kutta methods, i.e., we have proved the following convergence result.
T HEOREM 6.2. A spin-stabilized stiffly accurate Runge-Kutta
method based on a stiffly
accurate Runge-Kutta method of order with invertible j as together with the transformation (6.1) is convergent of order .
In order to study the stability properties of a spin-stabilized stiffly accurate Runge-Kutta
method concerning its long-time behavior, we apply it to the test equation (4.3). Let
denote the coefficients of the test equation, let
denote matrix functions that transform
to the canonical form of (4.5), and let be the stabilizing transformation according
to (6.1).
Setting
, we have to integrate the DAE
x 1Ø(
ë
Ý
* Ý ë ë
ëÜ Ý
x Ø(
ë ë
ë
x M Ý M *ë [ Ø9 Ý : x M Ý ¿ë \
Ë d i Eè l
c and Ýoë l Ý ë Ë l , the spin-stabilized RungeUsing, furthermore, the quantities l
Kutta method has the form
?
?
ë
ë
ë
(a)
Ý dU ? P dã ë ?Ò Ý ë d P ? d ii c n lp s ? ÿ l ó ë l dZ P Id
? e r r u ; m\\m\V g (6.13)
(b)
ë hó ë l fÝ[Ø ë : ëc nqë r}p s þ%l ó
; m\\m\V g \
lÝ l x lÝ ó l
(c)
x lÝ ló l
u
ë ë
Ý
lh
ó l are
Due to (6.13c) and the special form of the test equation, the scaled stage values o
Ë
consistent at time l . Writing down (6.11) for the present situation, we obtain that
ë
ë ?
ë ë
ë V P ? Ñ 2 : Ø ë :
â µ x l Ý l j
c âãµ l Ý l yx l Ý i
? â µ Ý l P 0CD á Ý l 1ó l ?
âãµ xl Ý ë l V j P Ñ 2 VR Ñ 2
Ý ë dZ P Id
ETNA
Kent State University
etna@mcs.kent.edu
SPIN-STABILIZED DAE DISCRETIZATION
or
415
?
ë
ë ?
ë ë ?
ë ë
â µ x l Ý l j P Ñ 2 â µ Ý l P : c ë âãµ ë Ø l : ? x l Ý Ý l P
CD á Ý l ó l CD á ² l x l Ý l Ý d P d V\
ë ë P ? :
:
e
[
Ø
l lx l c l x lÝ Ý l ,
The diagonal entries of the leading block matrix are given by
e r x l Ý ë l Ý ë rP ? . ³ The
³
l
whereas the off-diagonal
entries
have
the
form
third term, which has to
?
ë ë
x d l oÝ l Ý Md P in the right hand side. Using the consistency of the numerical
be considered is Hy
approximations according to
7 H? e d 7L;jiwt d @ e d1
A
d
; =
I@ e d =
(6.14)
ë ë
and similarly that of the stage values Ý l ó l , Lemma 6.1 yields that
ë ë d P ? 7 ;jiw; t d = 7 ; = i* @ V
âUä æ x l Ý l Ý
c
Y ¥áãå9
7
7
;
j
;
h
i
t
?
Ë
@
ë ë
; r = = i* c âUä æ x l Ý l Ý rP
Y ¥áãå9
ë ë P ? § 7 ;jiw; t Ë l = 7 ³[l e l : c p = i* @ V\
:
:
e
[
Ø
c
Y ¥ áãå9âUä {
æ ¦ [³ l lmx l c l x l Ý Ý l
dã ? coincides with Ý ë ó ë , we altogether have derived the representation
Since
i * c @ dMe @
dU ? e @(p Np R ½ j P ? : c pIÑP ? ² p
d
ñ
]
in the limit
. Comparing with Section 5.5, we immediately see that
R ½ j P ? : c pIÑP ? ² , V
p
G( is the stability function
is nothing else than
where , derived there. Moreover, , the classical stability function for ODEs. Hence, under
ë the assumption that the constantdin]ñthe
remainder term (which dependst on the choice of Ý ) is small, we see that in the limit
the influence of the parameter on the stability of the discretization has been removed.
6.3. Spin-stabilized BDF methods. In this section we discuss the use of spinstabilization within BDF methods. As in the previous section, we consider a strangeness-free
DAE (2.7).
A BDF method for the integration of (2.7) has the form
(6.15)
with
; d|"
xc r}s þ " P r d P r Ø d d iÛÙ d x d x Md¤Ø(dØ/Md Ù d3 Ù MdZ\
We assume that the method is normalized to have the leading coefficient
(6.15) then yields
"
IdN x d : c ÿ " ØEd!P ? c ÿ " Ù d : x d | þ " P r I
d P r
\
r}s ?
þ " ; . The relation
ETNA
Kent State University
etna@mcs.kent.edu
416
P. KUNKEL AND V. MEHRMANN
In view of (6.6), we must consider the matrix
: þ " P ?vI d m : þ v? I d : þ I d
Ñ2
÷
..
.
Ñ2
with
Let
Ü d Ý d
I|d¿f
x 1d 1ØEd to Weierstraß canonical form. Then ILd has the form
I d d d d d : ÿ " d Ø d d P ? d d d dP ?
Ý Ü x Ý $ Ü Ý
Ü x Ý Ý
Ý d 7 Ñ : c ÿ " % d : Ñ ÄJ= 7 Ñ = Ý dP ?
i * c ¤ c P ? Ý d 7 Ñ +
= Ý d
transform
?
â µ Ý dP m :\\\ Ý
þ "P
Ñ
implying that
?
x d : c ÿ " ØEdZ P x d1\
dP ? ÷ â µ Ý d1\m\\m Ý
? Ñ mñm :
mñm
ÑÄ
..
dZ
þ ? Ñ .
..
.
Ñ
ÑÄ
: þ
Ñ
i* c \
;^i c
Hence, if the BDF method is D-stable, see [13], then there is a vector norm such that the latter
in the corresponding matrix norm with a suitable constant .
matrix is bounded by
Comparing with (6.6) and observing (6.9) we have stability with
d ãâ µ Ý dU " \m\\ Ý dã " \
Thus, we have the following theorem.
T HEOREM
6.3. A spin-stabilized BDF method based on a BDF method of order $ ,
c
+$
together with the transformation (6.1) is convergent of order $ .
In order to study the stability properties of a spin-stabilized BDF method concerning its
long-time behavior, we apply it to the test equation (4.3). Let
denote the coefficients
of the test equation, let
denote matrix functions that transform
to the canonical
form of (4.5), and let be the stabilizing transformation according to (6.1).
r
r r with
r
r , we have to integrate the
Setting
and
DAE
; Î
ëÜ Ý
" Ý ë ë Ý d P Ý ë d P ë d P
ë ë
x M Ý M *ë [Ø9 Ý
x Ø(
ë
ë
Ý d P Ý M d P : x M Ý ë ¿ë \
Hence, the spin-stabilized BDF method has the form
x 1Øg
; dëd|"
ë ?
ë
ë ë ?
xc Ý r}s þ " P r Ý dP P r Id P r Ø(d Ý d : x d Ý Ý dP Id1
ETNA
Kent State University
etna@mcs.kent.edu
417
SPIN-STABILIZED DAE DISCRETIZATION
leading to the difference equation
(6.16)
"
dx : c Ø d i Ic x d Ý ë Ý ë dP ?
d i x d Ý ë d | þ " P r Ý ë dP P ? r d P r \
rts ?
Since the BDF methods yield consistent numerical approximations, we can again utilize
(6.14). Lemma 6.1 yields that
ë d ë dP ? r 7 ;jiht ; d P r = 7 ; = i+* @ d
c
Y¥áUåÏâãä æ x Ý Ý P ? 7 j; iwt d
7
t
ëd ë dP
; = = i+* c V\
Y ¥ áUåÏâãä æ x Ý l Ý
d3]ñ , this difference equation reads
Hence, in the limit
;jiwt dZ :t d : c p ;uiht dZ : c t ;u: pdZ i c t&i+* c @ i
·
@ e d
i | " þ " P r ;ji* c @ 1
A@ e " P r rts ?
which reduces to
;D: i+* c @ @ e d i
|"
r}s
@
þ? " P r ;ji+* c @ e " P r \
But this is nothing else than a perturbation of the difference equation which we obtain when
we apply the BDF method to the standard ODE test equation. Thus, provided the constants
involved in the remainder terms (which depend on the choice of ) are small, we can expect
the same stability properties of the spin-stabilized BDF methods as in the ODE case.
Ý
ë
ë
6.4. A numerical experiment. We have implemented the standard implicit Euler
method and its spin-stabilized version choosing as in (6.3). Using a constant stepsize, we
applied both methods to the problem of Example 1.1 for a range of parameter values
and checked numerically the stability of the numerical solutions. The results can be seen in
Figure 6.1 for the standard implicit Euler method and in Figure 6.2 for the spin-stabilized
implicit Euler method.
and cover the
6_ _ Both figures were obtained with a stepsize of
range
. The shading is based on a numerical estimate of the limit factor
between the norms of and
.
In Figure 6.1, one can recognize the stability restriction
, whereas
Figure 6.2 shows that the spin-stabilized implicit Euler method is stable in the region
,
where the actual solution is stable. We also see the superstability of the implicit Euler method,
i. e., the stability of the numerical solution of the implicit Euler method in regions where the
actual solution is not stable.
Applying one of the other methods gives similar results. In particular, as we have shown
in Section 6, the stability region of the spin-stabilized version is approximately given by the
condition
Ý
8 C -#ù : ¬ @
Hd
8 C c \ ;
Adã ?
n ;oi c 8 n b n ;Ei c C n ú8 bC
n , 8(:JC 1 Gn ; where , is the corresponding DAE stability function, and can be seen for the implicit Euler
method in Figure 6.2.
ETNA
Kent State University
etna@mcs.kent.edu
418
P. KUNKEL AND V. MEHRMANN
F IG . 6.1. Numerical stability region for the standard implicit Euler method for
Nf¨9Q\©3TUhW XZª[Qiª9]f^
7. Conclusion. We have analyzed the stability properties of general differentialalgebraic equations of arbitrary index and related them to those of the corresponding inherent
ordinary differential equation.
We have presented a new test equation for differential-algebraic equations that takes into
account that the kernel of
in a strangeness-free formulation of a given DAE may spin
along the solution. We have analyzed the stability of classical numerical integration methods
for differential-algebraic equations on the basis of this new test equation and introduced the
concept of DAE stability functions.
In order to deal with rapidly spinning kernels we have derived a new stabilization method
that can be used together with all classical integrators. We have shown that this approach
which in every integration step first transforms the equation, then carries out the integration
step by the given method, and finally transforms back, leads to the same convergence results
for stiffly accurate Runge-Kutta and BDF methods as for the unstabilized methods, while
getting more appropriate regions of numerical stability. Moreover, we have demonstrated our
new approach with a numerical example.
+.
Acknowledgment. We thank two anonymous referees for several comments and suggestions that improved the readability of the paper.
REFERENCES
[1] U. M. A SCHER AND L. R. P ETZOLD , Stability of computation for constrained dynamical systems, SIAM J.
Sci. Statist. Comput., 14 (1993), pp. 95–120.
ETNA
Kent State University
etna@mcs.kent.edu
419
SPIN-STABILIZED DAE DISCRETIZATION
F IG . 6.2. Numerical stability region for the spin-stabilized implicit Euler method for
NP¨9Q\©3TU1W XZª[Q\ª9]f^
[2] K. E. B RENAN , S. L. C AMPBELL , AND L. R. P ETZOLD , Numerical Solution of Initial-Value Problems in
Differential Algebraic Equations, Second ed., SIAM Publications, Philadelphia, PA, 1996.
[3] A. B UNSE -G ERSTNER , R. B YERS , V. M EHRMANN , AND N. K. N ICHOLS , Numerical computation of an
analytic singular value decomposition of a matrix valued function, Numer. Math., 60 (1991), pp. 1–40.
[4] S. L. C AMPBELL , Comment on controlling generalized state-space (descriptor) systems, Internat. J. Control,
46 (1987), pp. 2229–2230.
[5] S. L. C AMPBELL AND C. W. G EAR , The index of general nonlinear DAEs, Numer. Math., 72 (1995),
pp. 173–196.
[6] L. D IECI , R. D. R USSELL , AND E. S. VAN V LECK , Unitary integrators and applications to continuous
orthonormalization techniques, SIAM J. Numer. Anal., 31 (1994), pp. 261–281.
[7] M. D IEHL , D. B. L EINEWEBER , A. S CH ÄFER , H. G. B OCK , AND J. P. S CHL ÖDER , Optimization of
multiple-fraction batch distillation with recycled waste cuts, AIChE Journal, 48 (2002), pp. 2869–2874.
[8] M. D IEHL , I. U SLU , R. F INDEISEN , S. S CHWARZKOPF, F. A LLG ÖWER , H. G. B OCK , T. B ÜRNER , E. D.
G ILLES , A. K IENLE , J. P. S CHL ÖDER , AND E. S TEIN , Real-time optimization for large scale processes:
Nonlinear model predictive control of a high purity distillation column, in Online Optimization of Large
Scale Systems: State of the Art, M. Grötschel, S. O. Krumke, and J. Rambau, eds., Springer, 2001,
pp. 363–384.
[9] E. E ICH -S OELLNER AND C. F ÜHRER , Numerical Methods in Multibody Systems, Teubner Verlag, Stuttgart,
Germany, 1998.
[10] E. G RIEPENTROG AND R. M ÄRZ , Differential-Algebraic Equations and their Numerical Treatment, Teubner
Verlag, Leipzig, Germany, 1986.
[11] M. G ÜNTHER AND U. F ELDMANN , CAD-based electric-circuit modeling in industry I. Mathematical structure and index of network equations, Surv. Math. Ind., 8 (1999), pp. 97–129.
[12]
, CAD-based electric-circuit modeling in industry II. Impact of circuit configurations and parameters,
Surv. Math. Ind., 8 (1999), pp. 131–157.
[13] E. H AIRER AND G. WANNER , Solving Ordinary Differential Equations II: Stiff and Differential-Algebraic
Problems, Second ed., Springer, Berlin, Germany,1996.
[14] M. H ANKE , E. I. M ACANA , AND R. M ÄRZ , On asymptotics in case of linear index-2 differential-algebraic
equations, SIAM J. Numer. Anal., 35 (1998), pp. 1326–1346.
ETNA
Kent State University
etna@mcs.kent.edu
420
P. KUNKEL AND V. MEHRMANN
[15] I. H IGUERAS , R. M ÄRZ , AND C. T ISCHENDORF, Stability preserving integration of index-1 DAEs, Appl.
Numer. Math., 45 (2003), pp. 175–200.
, Stability preserving integration of index-2 DAEs, Appl. Numer. Math., 45 (2003), pp. 201–229.
[16]
[17] D. H INRICHSEN AND A. J. P RITCHARD , Mathematical Systems Theory I. Modelling, State Space Analysis,
Stability and Robustness, Springer, New York, NY, 2005.
[18] P. K UNKEL AND V. M EHRMANN , Smooth factorizations of matrix valued functions and their derivatives,
Numer. Math., 60 (1991), pp. 115–132.
[19]
, Regular solutions of nonlinear differential-algebraic equations and their numerical determination,
Numer. Math., 79 (1998), pp. 581–600.
, Analysis of over- and underdetermined nonlinear differential-algebraic systems with application to
[20]
nonlinear control problems, Math. Control Signals Systems, 14 (2001), pp. 233–256.
, Differential-Algebraic Equations. Analysis and Numerical Solution, EMS Publishing House, Zürich,
[21]
Switzerland, 2006.
[22] P. K UNKEL , V. M EHRMANN , M. S CHMIDT, I. S EUFER , AND A. S TEINBRECHER , Weak formulations of
linear differential-algebraic systems, Technical Report 2006-16, Institut für Mathematik, TU Berlin,
Berlin, Germany, 2006. url: http://www.math.tu-berlin.de/preprints/.
[23] P. K UNKEL , V. M EHRMANN , AND R. S T ÖVER , Symmetric collocation for unstructured nonlinear
differential-algebraic equations of arbitrary index, Numer. Math., 98 (2004), pp. 277–304.
[24] P. K UNKEL AND R. S T ÖVER , Symmetric collocation methods for linear differential-algebraic boundary
value problems, Numer. Math., 91 (2002), pp. 475–501.
[25] R. M ÄRZ , Criteria for the trivial solution of differential algebraic equations with small nonlinearities to be
asymptotically stable, J. Math. Anal. Appl., 225 (1998), pp. 587–607.
[26] R. M ÄRZ , Solvability of linear differential algebraic equations with properly stated leading terms, Results
Math., 45 (2004), pp. 88–105.
[27] R. M ÄRZ AND A. R. R ODRIGUEZ -S ANTIESTEBAN , Analyzing the stability behaviour of solutions and their
approximations in case of index-2 differential-algebraic systems, Math. Comp., 71 (2001), pp. 605–632.
[28] M. O TTER , H. E LMQVIST, AND S. E. M ATTSON , Multi-domain modeling with modelica, Chap. 36, CRC
Handbook of Dynamic System Modeling, P. Fishwick, ed., Chapman & Hall/CRC Press, Boca Raton,
Fl, 2007, pp. 36.1–36.27.
[29] P. J. R ABIER AND W. C. R HEINBOLDT , Classical and generalized solutions of time-dependent linear
differential-algebraic equations, Linear Algebra Appl., 245 (1996), pp. 259–293.
[30]
, Theoretical and Numerical Analysis of Differential-Algebraic Equations, vol. VIII of Handbook of
Numerical Analysis, P. Ciarlet and J. L. Lions, eds., Elsevier Publications, Amsterdam, The Netherlands,
2002.
[31] W. C. R HEINBOLDT , Differential-algebraic systems as differential equations on manifolds, Math. Comp., 43
(1984), pp. 473–482.
[32]
, On the computation of multi-dimensional solution manifolds of parameterized equations, Numer.
Math., 53 (1988), pp. 165–181.
[33] R. R IAZA , Stability issues in regular and non-critical singular DAEs, Acta Appl. Math., 73 (2002), pp. 243–
261.
[34] R. R IAZA AND C. T ISCHENDORF, Topological analysis of qualitative features in electrical circuit theory,
Tech. Report 04-18, Institut für Mathematik, Humboldt Universität zu Berlin, Berlin, Germany, 2004.
[35] A. M. S TUART AND A. R. H UMPHRIES , Dynamical Systems and Numerical Analysis, Cambridge University
Press, Cambridge, UK, 1996.
[36] T. S TYKEL , Analysis and Numerical Solution of Generalized Lyapunov Equations, Dissertation, Institut für
Mathematik, TU Berlin, Berlin, Germany, 2002.
[37]
, On criteria for asymptotic stability of differential-algebraic equations, ZAMM Z. Angew. Math.
Mech., 92 (2002), pp. 147–158.
[38]
, Stability and inertia theorems for generalized lyapunov equations, Linear Algebra Appl., 355 (2002),
pp. 297–314.
[39] C. T ISCHENDORF , On stability of solutions of autonomous index-1 tractable and quasilinear index-2
tractable DAE’s, Circuits Systems Signal Process., 13 (1994), pp. 139–154.
[40] K. W RIGHT , Differential equations for the analytic singular value decomposition of a matrix, Numer. Math.,
3 (1992), pp. 283–295.