OPTIMAL CONTROL FOR STERILIZATION OF CANNED FOODS by
advertisement

OPTIMAL CONTROL FOR STERILIZATION
OF CANNED FOODS
by
Manoj Mangesh Nadkarni
B.Tech., Indian Institute of Technology, Bombay
(1981)
Submitted to the Department of
Chemical Engineering
in Partial Fulfillment of the
Requirements of the Degree of
MASTER OF SCIENCE IN CHEMICAL ENGINEERING
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
September 1983
© Massachusetts. Institute of Technology 1983
Signature of Author:
Deptment
.
of Chemical Engineering
2 August, 1983
Certified by:
. Alan-Hatton, Thesis Supervisor
Accepted by:
Chairman, Departmental Graduate Committee
Archives
MASSACHUSETTS
INSTITUTE
OF TECHNOLOGY
OCT 241983
LIBRARIES
OPTIMAL CONTROL FOR STERILIZATION
OF CANNED FOODS
by
MANOJ MANGESH NADKARNI
Submitted to the Department of Chemical Engineering
on August 2, 1983 in partial fulfillment of the
requirements for the Degree of Master of Science in
Chemical Engineering
ABSTRACT
A mathematical model has been developed for maximizing the
nutrient retention during thermal sterilization of canned
foods. Pontryagin's minimum principle as applied to distributed parameter systems, has been used in the analysis. The
necessary conditions for optimization, derived by variational
methods, lead to bang-bang type of control which requires the
sterilization
and cooling.
to be carried out at maximum
rates
of
heating
A numerical procedure is outlined for the solution of the
resulting two-point boundary-value problem, which consists of
a system of nonlinear, coupled partial differential equations.
The unique behaviour of the costate variables makes it possible to integrate only the state equations in the forward
direction
in the time domain,
and
to
iterate
on
the
final
desired reduction of micro organisms. A single point switching
shows less nutrient degradation than any combination of
multiple switchings.
Optimization with constraints on the retort
temperature
results in a dual point switching where the control is either
at a maximum
or minimum,
or
is
zero.
The
model
has
been
applied to the sterilization of pork puree.
Comparison with
the nutrient retention obtained using other
temperature
policies, shows that bang-bang control with single. point
switching represents the optimal solution.
Thesis Supervisor: Dr. T. Alan Hatton
Title: Assistant Professor of Chemical Engineering
2
ACKNOWLEDGEMENTS
This is a necessary, but not a sufficient expression of
my indebtedness to several individuals. Undoubtedly, the
person to whom I owe the most, is my thesis advisor, Prof. T.
Alan Hatton, whose able guidance and endless efforts will
never be forgotten. His continuous encouragement and the
willingness to spend long hours of discussions have enabled me
to complete this thesis.
Among others, I am grateful to Prof. Robert A. Brown for
useful discussions on numerical methods, both in the class as
well as outside the class. A word of very special thanks goes
to Prof. Robert R. Tenney of the department of electrical
engineering at MIT, for patiently explaining to me many
intricacies of the optimal control theory. His help is greatly
appreciated. The financial support during this research work
was provided by MIT.
There are many friends at MIT and elsewhere, who have
helped me in different ways, perhaps most importantly, by
giving
a moral
support.
I owe it to all of them. Finally,
humble appreciation for what he has done for
dedicate this thesis to my father.
3
me,
I
wish
in a
to
LIST
Number
OF
FIGURES
Title
Page
2.1
Results of Saguy and Karel (1979)
24
4.1
Modified Control for Constraint on the
Retort Temperature
60
5.1
Basis
71
for Obtaining
a Single Point
Switching
5.2
Condition for Optimal Switching
74
5.3
Condition
75
for Switching
for the case of
no Constraint on the Final Concentration
of Micro Organisms
5.4
5.5
Bang-Bang Control: Single Switching
77
Final Concentration of Micro Organisms
79
as a Function
of Switching
Time
5.6
Results for Computer Simulation for BangBang Control
80
5.7
Effect of Variation
Control u
81
5.8
Variation
5.9
Nutrient Degradation at Different
Activation Energies
84
5.10
Optimal Control for Upper Constraint on
the Retort Temperature
86
5.11
Optimal Control with Lower Constraint on
the Retort Temperature
87
5.12
Bang-Bang Control: Two Switching Points
94
5.13
Results for Two Switching Points
95
5.14
Optimal Concentration Using Two Switching
Points
96
in Process
4
in the Limits
of the
Time
83
5
Title
Number
Page
5.15
Optimal Control: Three Switching Points
97
5.16
Optimal Concentration with Three Switching
Points
99
5.17
Variation
99
in Second Switching
Time t 2
( Three Switching Points )
6.1
Maximum Nutrient Retention at Constant
Uniform Temperature
6.2
Results of Teixeira
6.3
Spatial Domain
107
6.4
Optimal Control for Sterilization of Pork
Puree
109
6.5
Temperature Distribution at the CenterPlane
111
6.6
Nutrient Degradation during Cooling
Process
113
6.7
Variation in Maximum Rates of Heating and
Cooling
115
6.8
Nutrient Retention at Different Inlet
Hot-Fill Temperatures
117
6.9
Process Time and Total Sterilization Time
at Different Inlet Hot-Fill Temperatures
118
6.10
Variation
119
104
et al.(1975)
in Limits of the Control
103
u
LIST
OF
Number
TABLES
Title
Page
4.1
Variables and Parameters for System
Equations
44
5.1
System Equations
66
5.2
Initial, Terminal and Boundary Conditions
for System Equations
67
6.1
Process Data
102
6.2
Results for Two Dimensional Model
114
6
CONTENTS
Abstract
2
Acknowledgements
3
List of Figures
4
List of Tables
6
Chapter
Introduction
9
Chapter
Principles of Thermal Processing
14
2.1
Thermobacteriological Considerations
14
2.2
Retention of Nutrient Quality
18
2.3
Approaches to Optimization
21
Optimal Control Theory
25
3.1
The Minimum Principle
26
3.2
Bang-Bang Control
32
3.3
Distributed Minimum Principle
34
3.4
Remarks
38
Mathematical Model for Maximizing
Nutrient Retention
40
4.1
Model Formulation
40
4.2
Optimality Conditions Using the
Variational Approach
47
4.3
Comments on Optimality Conditions
55
4.4
Constraint on the Retort Temperature
57
Chapter
Chapter
7
8
Chapter 5
Numerical and Analytical Solutions
Strategy
64
64
5.1
Computational
5.2
Analytical
Solution
85
5.3
Multiple Switchings: Numerical
Solutions
91
Two Dimensional Models
101
6.1
Preliminaries
101
6.2
Results
108
6.3
Discussion and Conclusion
120
6.4
Suggestions for Future Work
123
Chapter 6
Appendix I Nomenclature
References
125
130
CHAPTER
1
INTRODUCTION
Sterilization of canned foods is one of the major
tions in the food processing
industries.
The
opera-
sterilization
process involves a suitable heat treatment of canned foods
that the can contents are virtually free of any
isms which
could degrade
the
food.
It
micro
is
organ-
impractical
achieve complete sterility; the cans are commercially
ized so that a desired degree of destruction of
isms is achieved.
tion is that the
One of the major
thermal
problems
processing
nutrients and food quality.
The
and organoleptic properties,
the
to
steril-
micro
organ-
in the steriliza-
causes
destruction
deterioration
and
so
of
of
nutrients
destruction
of
micro
organisms follow similar kinetics, and hence higher kill rates
for micro organisms also
quality.
involve
greater
loss
in
While it is highly undesirable to incur any degrada-
tion of nutrients, it
is
nevertheless
essential
to
ensure
a
factor
sufficient reduction of micro organisms, usually by
of five
nutrient
to
ten
log
cycles,
and
hence
nutrient
loss
is
unavoidable.
Much attention has been paid in recent
years
to
izing the nutrient quality in a sterilization process
to a specified reduction of
micro
9
organisms.
maximsubject
Sterilization
10
continuously
or
can be carried out in a batch retort
In both cases, the
hydrostatic sterilizers.
retort
ture and the process time are the two variables
mine the degree of sterilization.
made
to
design
temperatures,
retention.
a
with
suitable
a
view
to
been
have
the
maximizing
deter-
retort
for
policy
in
tempera-
which
Several studies
control
as
nutrient
Most of these studies are based on optimizing some
either
functional form for the temperature-time relationship,
analytically or experimentally, and are approximate in nature.
However, the recent advances in computer-aided process design,
and the development of modern control theory have provided the
The
potential for a new approach to optimization.
originally
this approach is the "minimum principle" which was
developed for lumped systems by Pontryagin and
for
basis
co-workers
in
the early sixties (Pontryagin et al., 1962). Subsequent developments have extended the concepts to incorporate
distributed
parameter systems.
The
major
advantage
associated
minimum principle is that now
with
state
the
distributed
the
variables
control variables can be spatially distributed in
of dimensions.
The
control
system
then
While the distributed
information and can more
systems than can lumped
model
accurately
models,
it
can
also
the
number
coupled,
and
provide
represent
is
any
involves
nonlinear partial differential equations of first
order.
and
much
second
more
the
physical
more
complex.
11
Compl&te analytical
However,
with
the
are
solutions
finite
of
availability
possible.
not
generally
and
difference
the
Galerkin finite element methods for discretizing
partial
differential equations, numerical solutions can be achieved to
a high degree of accuracy.
food
Application of the distributed minimum principle to
problems
processing
should
optimization of nutrient quality
sophisticated approaches.
better
provide
We
make
a
no
(e.g.
regarding the functional form
those
than
high
priori
assumption
temperature
versus
in
temperature
Also, the distributed nature of the model allows for
a rigorous mathematical formulation of the problem with
simplifying
studies.
short
conditions
Rather it is the necessary
the minimum principle which determine the optimal
profile.
less
on
based
time, ramp, sinusoidal etc.) of the retort temperature
time relationship.
for
procedures
assumptions
than
those
In this thesis, the optimal
canned foods is investigated
using
in
embodied
thermal
the
fewer
earlier
processing
distributed
of
maximum
principle as a starting point.
In what follows, the salient aspects of
food
processing
operations and the associated kinetics are discussed.
In
the
second chapter, the basics of sterilization processes and the
Note that the terms 'minimum principle' and 'maximum
principle' are used synonymously. Actually, they differ only
in sign.
12
reviewed.
for
work
esearch
past
nutrient
optimizing
retention
are
with
the
The third chapter is primarily concerned
tools for optimal control.
time
It deals with the continuous
minimum principle, analyzes some of
the
the
of
limitations
lumped model and establishes the need for a distributed model.
described
also
A generalized distributed parameters model is
here.
In the fourth chapter, the emphasis is on the application
of the minimum principle to the problem of optimizing nutrient
retention.
The
are
optimality
for
conditions
necessary
derived here starting from the basic principles of variational
the
calculus. The discussion on numerical methods for solving
system
above-mentioned
equations,
fifth
the
in
follows
chapter. We have considered here one dimensional slab geometry
for
mathematical
nature
and
of the optimal
computational
control
is
also presented
in this chapter.
chapter, we are mainly
concerned
it
known,
derive analytical solutions for system
In the
the
is
possible
to
These
are
equations.
sixth
and
the
exists
for
puree,
comparison
final
of a
with an application
dimensional model to sterilization of pork
for which significant data
Once
convenience.
a
two
process
purposes.
Most of the previous research has failed to account rigorously
for sterilization during the cooling cycle, necessitating some
new definitions. We elaborate two main aspects
of
our
model
here, namely the minimum principle leading to optimal nutrient
13
retention and the distributed nature of the system giving more
accurate predictions.
Conclusions and
some
suggestions
for
future work follow.
Though the present work is primarily concerned
maximization of the nutrient quality subject
to
the
with
an
integral
constraint on the final concentration of micro organisms,
the
results would very well apply to any process which is governed
by a diffusion-like equation with the surface concentration or
temperature as a control variable.
be to enhance
one kind of reaction
other, where both would
have
The objective
product
similar
and
then
suppress
temperature
kinetics with different activation energies.
would
the
dependent
CHAPTER
2
PRINCIPLES OF THERMAL PROCESSING
It is of prime concern for the food
to be able to design a flexible heat
sterilizing canned foods.
processing
treatment
engineer
schedule
The objective is always
to
that sufficient destruction of contaminating
micro
is achieved with a minimum loss in
quality.
the beginning of the twentieth
nutrient
century,
several
ensure
organisms
Since
researchers
have reported analytical and experimental work in
this
Bigelow et al.
method
(1920)
gave
the
first
general
for
area.
for
calculating thermal process times, and shortly thereafter Ball
(1923) defined
several
parameters
of
interest
in
thermal
processing and developed mathematical formulas which are still
used in the food processing
industry.
Several
others
have
done pioneering work in this area during the last few decades.
There have been numerous textbooks describing the
practice of thermal processing, such as those by
Beverloo (1975), Loncin and Merson (1979),
Charm
theory
and
Leniger
and
(1978)
and
Harris and Karmas (1975).
2.1 TERMOBACTERIOLOGICAL
CONSIDERATIONS
The micro organisms present
14
in
food
are
destroyed
by
15
thermally induced changes in the original
of the proteins
usually assumed
This leads to an
in the cells.
the cells to reproduce.
to
by
a
first
structure
inability
of micro
The destruction
occur
chemical
of
organisms
is
irreversible
order,
reaction often described by the rate equation
(2.1)
dN/dt = - K N exp(-E/RT)
t is the time and the term
where N is the concentration,
K
exp(-E/RT)
is
the
temperature
degradation of organoleptic quality
such
as
vitamin
C
and
The only difference in
kinetics.
values
rate
Chemical reactions occurring in food which lead
constant.
trients
reaction
dependent
of the constants
higher for
nutrients
and
thiamine,
these
micro
for
(1982) and Lund (1975) give a detailed
of activation
energies
for
different
follow
is
cases
K and the activation
than
of
destruction
to
nu-
similar
that
the
energy E are much
organisms.
listing
micro
of
Thompson
the
values
organisms
and
nutrients.
However,
it is usual practice
in
the
food
engineering
literature to denote the temperature dependence of
the
reac-
tion rate constant by
K = Kref exp [ b(T-Tref)
so that an equivalent
organisms
expression
and nutrients
(2.2)
]
is
for the destruction
of
micro
16
(2.3)
dN/dt = - Kref N exp [b(T-Tref)]
Furthermore,
microbiologists
and
define two more parameters, D and z.
to reduce the reactant
concentration
given temperature, while z
is
the
food
technologists
D is the
time
by a factor
increase
required
of 10,
in
at
temperature
necessary for reducing the value of D by a factor of 10.
the definition of the reaction rate constant
K,
a
one
From
obtains
D=2.303/K, so that the kinetic expression becomes
dN/dt = - (2 .303/Dref).N exp [(T-Tref)/(z/2303)]
Here the time and the Dre f values
are
usually
minutes,
the
z
and the temperature
and
celsius (or Fahrenheit). The
reference
(2.4)
expressed
values
in
temperature
in
degrees
Tref
is
normally taken as 121.1 degree C ( 250 F).
Points along the center of a cylindrical
the slowest heating region.
The mechanism for
can
heat
is assumed to be primarily conduction, though some
currents may be set up
in
Leniger
(1975)
and
Beverloo
qualitatively.
the
case
have
of
constitute
transfer
convective
semi-liquid
discussed
this
foods.
aspect
The coldest spot may occur below the geometric
center of the can if
during processing.
there
is
The process
no
agitation
design
of
containers
calculations
may
be
based on the temperature history at these points. Many a time,
however, it is desirable to achieve a certain level of average
17
concentration over the entire can rather than
tion at a few critical points. Some other
the
factors
concentrawhich
can
affect the degree of sterilization are: the size and the shape
of the cans, movement of cans in
the
sterilizer,
empty space in the sealed can and perhaps the
volume
of
composition
of
the vapour/gas mixture in this space.
Hayakawa (1978) gives a summary of how the empirical
analytical formulas have been developed in the past.
Olson (1957)
have
developed
tables
for
the
and
Ball and
variation
in
process values with respect to heat transfer coefficients
and
the difference between the temperature of the center point and
the surface of the
containers.
Stumbo
(1953)
developed
mathematical model which based the process time on the
a
proba-
bility of survival of micro organisms in the whole
container,
and not just the center of the can.
Smith
Tung (1982) have reviewed various
compared their accuracy.
Most recently,
formula
methods
Most of the currently used
and
energy
have
sterili-
zation methods seem to have a high factor of safety and
there is considerable scope for saving
and
hence
and
improving
a
lethality
the organoleptic quality.
Lenz and Lund
(1977
a,b)
have
developed
Fourier number method for estimating sterility
center of the can.
Lund et al.
value
This is an extension of the work
at
the
done
by
(1972), which introduces the concept of adiabatic
equilibration temperature.
The mass
average
temperature
of
18
the food contents is higher than
during the heating period.
the
centerline
Containers are
temperature
heated
until
the
average temperature inside the can is sufficient to induce the
desired kill rates. Then they are held adiabatically until the
centerpoint
temperature
rises
distribution is achieved.
and
a
uniform
temperature
This concept was first
applied
by
Lund for quick blanching operations.
2.2 RETENTION OF NUTRIENT QUALITY
In recent
kinetics
years,
of nutrient
research
degradation
nutrient quality of thermally
has
been
directed
to
the
and to the prediction
of
the
Harris
and
processed
foods.
Karmas (1975) and Lund (1977) have discussed
heat processing on nutrients.
the
effects
of
It may be ocassionally possible
to improve the taste of the canned food by heat treatment, but
that is rarely an objective.
In most cases,
the
nutritional
and the organoleptic quality of the food reduces as
of thermal processing.
The kinetics of
nutrient
are similar to those of the destruction
of
a
result
degradation
micro
organisms,
two parameters of interest being the rate of nutrient destruction Kr, at a reference
temperature
Tr,
for
a
first
reaction, and the Arrhenius activation energy Ea .
parameters are equivalent to the Dr-value
perature
Tr, and the
z
value,
discussed
at
in
These
reference
the
order
two
tem-
preceding
19
section.
It has been observed by Joslyn and Heid
(1963)
that
at
higher temperatures, the destruction rate of bacteria accelerates more rapidly than the degradation rate of nutrients, thus
favoring
high
temperature
short
time
Ammerman (1957) studied the effects
of
(HTST)
heat
processes.
treatment
different processing temperatures and equal microbial
ity values, on selected food constituents,
by
thermal
calculations
Stearothermophilus.
organisms
are
Stumbo
used
C.
(1973)
energy-values for these micro
lethal-
analyzing
effect on colours, flavours and nutrients such as
The two main kinds of micro
as
vitamin
a
organisms
the
as
This
means
that
for
a
and
B.
activation
50-80
given
C.
in
kcal/mole
which are significantly higher than those of nutrients
20 kcal/mole).
the
basis
Botulinum
gives
with
(about
increase
in
processing temperatures, the rate of micro
organism
destruc-
tion will increase more rapidly
rate
nutrient
than
the
degradation. This observation forms the basis
of
for
optimizing
rate
constants
processes to yield maximum nutrient retention.
The activation energies and the reaction
for different nutrients depend on factors such as
medium, the composition of the food medium and
reduction potential.
There are
several
e.g. texture, colour and the flavour of
pH
its
quality
of
the
oxidation
attributes,
food,
which
exhibit
similar degradation due to thermal processing.
Their
activa-
20
tion energies vary in the range 10 to 25
kcal/mole
1971). The activation energy for thiamine,
has been studied extensively, is
not
a
(Timbers,
nutrient
strongly
which
dependent
on
food medium or composition, and hence the mechanism of thermal
degradation of thiamine appears to be the same
for
different
media.
the
reference
at
the
reference
and
the
pH.
However, the reaction rate constant at
temperature (or equivalently the
temperature)
is a function
D
of the
value
medium
For
example, the thiamine destruction at pH 6.6 is about 12
faster than at pH 3.2 .
Other
nutrients
include vitamin C and chlorophyll.
frequently
times
studied
Their activation
energies
vary between 10 and 25 kcal/mole.
Mulley et al. (1975 a,b,c) have
for thiamine destruction in various
studied
food
reaction
products
observed that, in natural foods thiamine is more
rates
and
heat
have
resis-
tant than thiamine in buffered and aqueous solutions, although
a first order reaction mechanism seems to hold for both acidic
(pH less than
4.5)
and
non-acidic
Ohlsson (1980 a) and Castillo et
al.
foods.
(1980)
More
recently,
have
developed
quantitative expressions for retention of nutrients.
Thompson (1982) discusses some of the pitfalls
the
simplified
approach
of
first
order,
non-cyclic reaction for predicting nutrient
other
nutrients
using
irreversible,
degradation.- The
degradation rate for a particular nutrient may be
of the concentration of
of
and
a
hence
function
it
may
21
concentrations
change in a complex manner as various reactant
However, in the absence
change during thermal processing.
and
any detailed
more
to
complex reactions, an approximation
al.
of
reaction
is
kinetics
Hill
by
given
for
appli-
predicting nutrient quality. A general treatise on the
cability
be
(1971)
models
mathematical
are among others who have developed
may
order
first
(1977) and Jen et
Downes and Hayakawa
justified.
for
modeling
mathematical
accurate
of
and
Grieger-Block (1980).
2.3 APPROACHES TO OPTIMIZATION
There has been growing concern over the nutritional value
of canned foods and this has led to active research programmes
Broadly speaking, optimiza-
for optimizing thermal processes.
tion refers to a
alternatives, that process which
some
preset
quantities,
Various approaches have
selecting
for
procedure
will
subject
been
certain heat treatments of
used
canned
or the design
minimize
maximize
or
certain
constraints.
to
for
this
foods,
one
of equipment.
For
purpose.
may
optimize the temperature-time profile, or the size
of containers,
various
, among
wish
shape
and
Teixeira
to
et
(1975) have considered different geometries for containers
al.
to
yield better heat penetration and thereby to optimize thiamine
retention.
Flat container geometries or cylindrical cans with
22
However, in
very high height to diameter ratios are favoured.
practice
the shape and the size of containers
is determined
by
other considerations such as cost of manufacturing and attractiveness of the product.
rotation
providing
Processing equipment is designed for
and agitation of cans during the sterilization process.
There
this
area.
designs
patented
are several variations and
Hydrostatic sterilizers, which can process
ture policy developed in
more
used
now
retort
The optimal
subsequent
the
continuously
cans
are
in a pressurized high temperature space,
frequently (Fairbrother, 1982).
in
temperawill
chapters,
be
applicable to both batch-type processes as well as to continuous sterilizers.
Teixeira
et
al.
have
(1969)
shown
on
dependent
retention of nutrients is also
energy or the z value of nutrients.
that
maximum
the
activation
the
For a low z
(high
value
E) nutrient, a process with low temperature and high
time
preferred while for those having high z values, shorter
and higher process temperatures are
Ball (1971), Teixeira
et al. (1975) and
and
Thijssen
(1980) have considered variable retort temperatures to
ize the nutrient retention.
However,
study the influence of other factors as
and
simplifications
inference.
made,
if
any,
one
should
well
before
times
Hayakawa
desirable.
as
is
and
Kochen
maxim-
carefully
assumptions
drawing
For example, Teixeira and co-workers have
any
neglec-
23
ted the sterilization as well as the micro
tion during the cooling
detail in chapter 6.
cycle.
This
organism
will
be
destruc-
discussed
in
Loncin and Merson (1979) briefly discuss
the use of the Euler-Lagrange
equation
in optimizing
nutrient
quality.
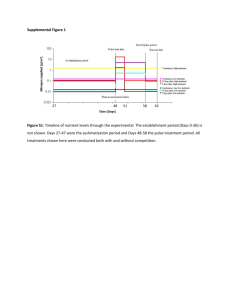
Saguy and Karel (1979)
principle as applied to
have
lumped
used
Pontryagin's
models,
for
minimum
maximizing
the
nutrient retention during sterilization of canned foods.
is possibly the only published application of optimal
theory to food processing operations.
optimal temperature profiles
Figure
obtained
using
2.1
This
control
shows
this
the
technique
principle. These temperature policies are shown to improve the
thiamine retention by more than two percent as
compared
with
other schemes. Their results are encouraging, although some of
their assumptions may not
be
strictly
correct.
They
have
averaged the micro organism and nutrient
concentrations
over
the entire can, and have then used first
order
the averaged quantities.
to be the fact that
kinetics
The reason for this averaging
Pontryagin's
applied only to the lumped models.
minimum
principle
This is a
for
seems
can
severe
be
limita-
tion of the model as presented by Saguy and Karel.
There appears to be some scope for the formulation of the
optimization problem more rigorously by
the spatially distributed
nature
of
taking
the
into
system,
account
and
applying the minimum principle. This is the prime task of
then
the
24
thesis research that follows in the subsequent chapters.
t.
a
6-
4
0
WJ
g
A
a
I.-
0
0.2
0.4
TIME,
0.6
0.8
1.0
ldimensionless)
Optimal retort temperature (B0). mass average temperature
(Bin, and central point temperature (B,) during the sterilization
process (A 12 can).
a
I
44
4
w
IC
TIME,
procn
(dimensionloss)
Optimal retort wnperature profiles for the sterilization
of peapurse in #303 can and pork puree in A2K~ can.
Fig. 2.1 Results of Saguy and Karel (1979)
3
CHAPTER
OPTIMAL CONTROL THEORY
Pontryagin's
Minimum
Principle
is
one
of
the
major
contributions to the development of optimal control theory. It
has found a variety of applications in many different types of
control
in
especially
problems,
electrical
wish
engineering. In this chapter, we
to
and
review
aerospace
the
basic
statement of the minimum principle in one of its commonly used
represent
forms, using the state space approach throughout to
the system. In
what
follows,
we
a
consider
deterministic
system with a known relationship between the system states and
the input control.
The aim is to find the
which drives the state X(t) to
a
desired
functions
continous and continously differentiable to first
noted).
The existence
It
objective.
important to assume that all scalar and vector
(unless otherwise
control
particular
is
are
derivatives
of a solution
to
the
control problem must also be assumed in deriving the necessary
conditions.
The latter part of
the
chapter
important aspects related to our subsequent
bang-bang control and the
distributed
pr incipl e.
25
introduces
research,
minimum
(or
two
namely
maximum)
26
3.1 THE MINIMUM PRINCIPLE
The minimum principle for lumped models is
Lumped models are
this section.
discussed
the
by
characterized
in
fact
that the state variables are functions of time alone, and that
the system dynamics can be described by ordinary
equations.
To begin, assume
that
the
interest is completely represented by a
differential
linear
of
process
physical
nonlinear
or
system of coupled or uncoupled differential equations
of
the
form,
(3.1)
X = f (X,u,t)
where the m-dimensional control
vector
u(t)
determines
the
n-dimensional state vector X(t). A fixed time interval [to,tf]
for the process;
is considered
concepts to the
case
of
it will be easy to
variable
terminal
extend
time.
the
General
statements of the initial and final conditions are given by
Q [(to),to]
(3.2)
= 0
and
(3-3)
R [X(tf),tf] = O
respectively.
Obviously, the dimensions of Q and
less than or equal to n.
R
will
be
The following analysis considers the
case where initial conditions are specified by equation (3.2).
27
The objective of the optimal control problem is to search
for a control policy u(t) which will minimize a cost function,
J.
The exact form
judgement.
of
the
cost
function
The optimality conditions, namely
is
a
matter
the
of
conditions
which will lead to a minimization of J, will
depend
strongly
on the nature
to
able
of J.
Hence it
is
important
be
quantify the cost or the performance index correctly.
Most of
the time, the cost function consists of two terms, namely
cost associated
with the terminal
state, and
cost over the entire time domain.
the
to
the
accumulated
In mathematical terms,
the
cost function J can be written as
J = C [X(tf),tf] +
g[X(t),u(t),t] dt
(3.4)
to
Costate variables P(t), which are similar to the Lagrange
multipliers for the case of static optimization, are
to the system
equations
and incorporated
into the
adjoined
cost
func-
tion such that
J = C rI(tf),tf] +
5 {g[X(t),u(t),t] +
to
p T (t).rf(X(t),u,t)-X(t)]
dt
(3.5)
A scalar function Hamiltonian is defined as
H[X(t),u(t),P(t),t] = g[X(t),u(t),t] + PT(t).fEX(t)u(t)t]
(3.6)
28
Incorporating the Hamiltonian
into
the
cost
function,
one
obtains
J = C[X(tf),tf] +
.
H[X(t),u(t),P(t),t] - Pr(t).X I dt
(3.7)
*t
A necessary condition for optimality is
that
the
first
variation in J must be zero for independent variations in
the
state vector X and the control
the
vector
u.
canonical equations for the state and
(Pontryagin
the
This
yields
costate
variables
et al., 1962)
X = JH/aP = f(X,u,t)
(3.8)
P = - a H/a
(3.9)
and an additional optimality condition,
aH /
(3.10)
u = 0
The state variables X(t) are free to end on any
manifold (i.e. can have any values at the
terminal
terminal
time).
A
transversality condition of the form
P(tf) = DC /
x(tf)
is obtained for the
(3.11)
costate
variables.
Thus,
the
terminal
condition on the costate variables is determined by the nature
of C, the cost for having
a particular
end point
state.
The
control system equations constitute a two point boundary value
29
problem.
This is an important
characteristic
of
the
minimum
principle, where the costate variables always evolve backwards
in time.
When the terminal time is not fixed, there
is
tional equation corresponding to the variation in tf
H[X(tf),u(tf),P(tf),tf] +
C/atf + (R
/tf).L
an
addi-
which is
= 0
(3.12)
where the end point constraint on the state variables, described by an r dimensional
vector
R
[equation
(3.3)]
is
also
adjoined to the cost function by an r-fold Lagrange multiplier
L. Note that r is less than or equal to n.
The transversality
conditions are then given by
P(tf) =
C/@X(tf) + (R
Thus there are
r
T /;X(tf)).
L
additional
(3.13)
equations
given
by
(3.3)
to
account for the r dimensional unknown vector L.
In
cases
where
the
control
variable
vector
is
constrained, the necessary condition given by equation
(3.10)
can hold only if the domain
u
completely in
the
interior
of
of
the
optimal
the
control
constraints.
speaking, it is no longer possible to take independent
tions in u and the optimality condition
(3.10)
must
is
Strictly
variabe
re-
placed by the more general form,
H[X*(t),u*(t),P*(t),t] < [X(t),u(t),P*(t),t1
(3.14)
30
where the superscript * denotes optimal states.
In
essence,
the necessary condition for optimality is the global minimization of the Hamiltonian H within the constrained domain for u.
The variational
approach
has
generally
been
deriving optimality conditions [Berkowitz(1961),
used
in
Denn(1969)],
although it may not always be possible to apply the techniques
of variational calculus, for example, in the case
or state variable
inequality
constraints.
proof of the minimum principle is that
Falb (1966). It gives a
new
A
given
interpretation
of
more
control
by
to
rigorous
Athans
the
and
costate
variables P; namely, the costate equation for P describes
motion of a normal of a hyperplane
trajectory.
along
optimal
The optimal trajectory represents
in cost with change in the state space X
cluded as a state variable.
optimality, any
portion
which considers temporal
According
of
optimal trajectory itself.
time)
the
the
the
where
to
optimal
state
variation
time
the
the
is
in-
principle
of
trajectory
is
an
This forms the basis for the proof
variations
and spatial perturbations
in u
that the motion of the hyperplane
in
.
tf
In
described
(free
effect,
by
the
terminal
it
shows
costate
equations does indeed lead to necessary conditions for minimizing the Hamiltonian. The proof of the minimum principle
also
yields one of the key properties for the state and the costate
variables, namely,
31
< X(t),
P(t) > = XT(t).P(t)
(3.15)
= constant
variables
i.e. the inner product of the state and the costate
is invariant with time.
It is not necessary to
minimum
the
formal
to
use
it.
able
to be
principle
know
variational
Ray
and
(1969)
Gould
cases.
approach is adequate in most
The
the
of
proof
appli-
(1981) have discussed some of the chemical engineering
cations of the minimum principle for lumped models (i.e. where
the
system
can
by
represented
be
differential
ordinary
equations). Szepe and Levenspiel (1968) derived an
solution
for the optimal
in the case
temperature
catalyst
of
Among
kinetics.
irreversible
deactivation via first order,
analytical
columns
separation processes, the application to distillation
operations by Jones (1974).
Other uses
tower
cooling
to
has been considered by Robinson (1970) and
include
optimization
of polymerization temperature and initial initiator concentration for batchwise
Jeng, 1978), two
radical
step
catalytic
(Chen
polymerization
chain
in
reactions
bed reactors
in
the
presence
of
deactivating
of
using the
applied
minimum
principle.
Pontryagin's
minimum
Murase
in
et
principle
fed
batch
al.
in
fixed
immobilized
enzyme catalyst (Patwardhan and Sadana, 1982). Yamane
(1977) maximized the metabolite yield
beds
packed
(Chang and Reilly, 1976), and the optimal operation
and
et
al.
culture
(1970)
optimizing
have
the
32
in
temperature profile for ammonia synthesis
a
multitubular
reactor heat exchanger system.
3.2 BANG-BANG CONTROL
A very interesting case arises when
the
Hamiltonian
given
linear in the control vector u. The necessary condition
by equation (3.10) does not
respect to u since
extremize
the
Hamiltonian
H/;u is now independent of u.
It
is
with
can
vector
immediately seen that if the domain for the control
be
u
to
can
be
driven
negative infinity by choosing infinitely large
or
infinitely
is infinitely large, then the Hamiltonian
However,
small values of u.
most
in
physical
situations,
there will be some bound on u, for example,
Umin < u <
(3.16)
max
The condition for optimality
is
given
by
equation
(3.14),
which in this case will be
u = umax for
H / u<
O
and
u = umin for
H /
u > 0
(3-17)
Thus the Hamiltonian is minimized
boundaries of the domain of u. The
by
operating
at
the
occur
at
the
switchings
33
singular points where
H/au=O. When the term
not just at certain finite points but in a
for a
problem
certain
state-space
interval,
is said to have a singular
arc, the contribution
aH/au
continuous
the
arc.
is
solution
Along
not
be
further
the
the
singular
is zero
extremized
choice of u. An additional equation is required to
manner
to
of the u term to the Hamiltonian
and the Hamiltonian can
zero,
by
any
solve
for
u, which is obtained by considering
d/dt ( H/,u
) = 0
If the above equation
(3.18)
is
insufficient,
time derivatives of (H/au)
successively
higher
can be set to zero to solve for
u
in terms of the state and costate variables.
Bellman
et al. (1956), Johnson
(1965)
have discussed bang-bang control and
the
and
Sage
singular
arising in optimal control. One of the early
(1968)
solutions
applications
of
the variational approach for deriving necessary conditions for
a singular control was given
by
Desoer
(1959).
Canon (1964) have presented a solution in
switchings for the problem
of
minimum
space vehicles, where the control
is
terms
fuel
Athans
of
used bang-bang control for
and
deriving
applied
for
Gibilaro
optimal
multiple
consumption
whenever a given amount of consumed fuel would result
most efficient motion. Farhadpour
and
'firing',
in
(1981)
inlet
in
the
have
reactant
concentrations in the case of an unsteady state operation of a
34
continously stirred tank reactor.
Most of the examples of bang bang control, including
those which are mentioned above, are for lumped systems.
problems are, however, distributed in nature
of the minimum principle to distributed
and
all
Many
application
parameter
models
is
discussed in the next section.
3.3 DISTRIBUTED MINIMUM PRINCIPLE
The emphasis in this section will be on
the
development
of the minimum principle for systems which are distributed
nature.
Distributed
systems
are
characterized
by
partial
differential equations in the spatial coordinate vector y
time t.
and
Butkovskii and Lerner (1960) were among the first
consider the
minimum
principle
as
applied
to
in
to
distributed
parameter systems.
Consider a distributed system described by
DX(y,t) / t = f
y,t,u(y,t),aX/y,
...
, kx/yk,
..
]
(319)
The initial conditions on the state variables are specified at
t=t o, and the boundary conditions on the distributed variables
are specified in terms of X(t,y), ;X/ay, etc. at the
ies of the spatial
domain.
The objective
boundar-
is to find an optimal
control u(y,t) which will extremize the cost function
35
J = .C [X(ytf),
k
.X(y,tf)/y
tf] dy +
5g[X(y,t),
kX/-ay',
y, u(y,t), tdy
t
As before,
(3.20)
i
the first term in the cost
associated with the terminal
represents
dt
the accumulated
spatial domain.
The
state,
cost
Hamiltonian
function
while
over
H
the
the
is
is
the
cost
second
term
entire
defined
time
as
and
before,
namely,
H[ X(y,t), aX/y
k(y,t), y, t, u(y,t), P(y,t)]
g[X(y,t), kX/y_ (y,t), u(y,t), y,t] +
P(y,t).f[X(y,t),
X/;y (yt),
(y,t), y, t]
(3.21)
The system equations
are adjoined
via spatially distributed costate
cost
function
Hamiltonian.
can
then
be
to
variables
expressed
The process time is assumed
though extension to a free
the
terminal
in
and
the
terms
of
the
be
is
first variation in J, namely 5J, is found by
function
P(y,t)
to
time
dent variations in the state, costate and
cost
fixed,
al-
possible.
The
taking
control
indepen-
variables,
and one then obtains the following necessary conditions:
aX/ t = H/P = f
(3.22)
36
_P/,t)
= -
H/ax - (-1 )k k/ yk
H/
(3.23)
x/[_1
and
H[X*(yt),
(DaX
v,y, t, _ (y,t)]
H[X*(y,t), (X/y*
Equation (3.24)
is
, y, t, u(y,t)]
the
general
form
(3.24)
for
the
global
minimization of the Hamiltonian. If the control vector u is
function of time
alone,
i.e.
u(y,t)=u(t),
then
the
a
above
condition reduces to
SH[X*(y,t), ( kX/ayk)*, y, t, u*(t)] dy
H[X*(yt), ( akX/y ),
y, t, u(t)]dy
(3.25)
Similarly, for u(y,t)=u(y), this reduces to
f H )kk),y,t, u (y)] dt
5
H[X_(yt),
(;k/ap*,
y, t, u(y)]
Note also that when u is unconstrained,
equal to zero for optimality,
(3.26)
t
H/au can be
either at each point
in the case
of equation (3.24), or over the entire spatial domain
time domain in the cases of
conditions
(3.25)
set
and
or
the
(3.26)
respectively. (Ray and Szekely, 1973)
The distributed components of the state
or its spatial derivatives
are
generally
variable
specified
vector
on
the
37
boundaries of y, and the initial state,X(y,to ) is
transversality
The
be completely known.
to
assumed
conditions
on
the
applied
to
the
costate variables evolve from the variations
state vector x. The end point conditions (t=tf) are given as:
P(y,tf) = C(y,tf)
The transversality
/ X(y,tf)
(3.27)
conditions on
the
y
of
boundaries
are
derived for the distributed costate variables as
ak-{
H /k
kx/yk]
=
}1 /
Equation (3.28) holds for
all
O
(3.28)
values
conditions for optimality, namely (3.22)
associated transversality conditions
t.
of
to
(3.27)
derived using the variational approach.
The
necessary
The
and
the
(3.28)
are
(3.24)
and
steps
detailed
involved in using this approach can be best illustrated for
particular problem at hand. This is shown in the next
a
chapter
for the problem of maximizing the nutrient retention of canned
foods during sterilization processes.
There have been a few
applications
of
the
distributed
maximum principle to chemical engineering processes.
Hahn
et
al. (1971) have computed an optimal start up policy for a plug
flow reactor wherein a first order, reversible and
reaction takes place. The distributed
maximum
exothermic
principle
was
also applied to the problem of catalyst deactivation by Ogunye
and Ray (1971) and by Gruyaert and Crowe (1974).
38
Nishida et al. (1976) have compared linear and
lumped models and distributed models, with
their
to problems in reaction engineering. They
have
nonlinear
application
considered
catalytic series reaction in a tubular, nonisothermal
where
the
control
catalyst
variable.
activity
This
is
appears
the
to
radially
the
only
a
reactor
distributed
example
of
bang-bang control as applied to a distributed system.
3.4 REMARKS
The
necessary
conditions
principle, namely equations
derived
(3.8)
to
using
(3.10)
the
or
maximum
(3.12)
to
(3.14) for lumped systems and equations (3.22) to
(3.24)
distributed systems,
optimality.
correspond
Actually, the first variation
in
only
J
to
local
yields
only
the
extremum of the cost function. By taking the second
local
variation
.2J, it can be shown that this extremum does correspond
local minimum. However, note that the global
for
to
minimization
a
of
the Hamiltonian does not imply global minimization of the cost
function over all values of u (Athans and
Falb,
1966).
Thus
more than one solution may be possible for the given system of
state and costate equations and the associated
transversality
conditions.
Some other observations are also in order. The
ian H is always minimized
as long
as
the
optimal
Hamiltonu
is
a
39
continous function. This may not occur, for
example,
switching points in bang bang control, since at
the contribution
is zero
of u to the Hamiltonian
these
at
the
points
irrespective
of the choice of u. Thus the Hamiltonian can not be extremized
at the singular points, which
frequently referred to as
is
bang-bang
why
suboptimal
control.
should be noted that the only difference between
and the minimum
principle
is
that
equation (3.14) or (3.24) must be
the
control
is
Further,
it
the
Hamiltonian
globally
maximized
maximum
in
the
rather
than minimized; other necessary conditions remain unchanged.
CHAPTER
4
MATHEMATICAL MODEL FOR MAXIMIZING NUTRIENT RETENTION
The main task in this chapter is to develop a
cal model for optimal control of
the
mathematiprocess.
sterilization
The system equations are cast in dimensionless form, and based
on the variational approach, a detailed proof is presented for
shown
the derivation of the optimality conditions. It is
how
policy.
the problem formulation leads to a bang-bang
control
The control must be modified when inequality
constraints
are
incorporated into state variables, such as a constraint on the
retort temperature. The resulting
policies
control
less optimal in such cases than those obtained with
will
be
fewer
or
no constraints.
4.1 MODEL FORMULATION
During the sterilization process,
heat
transfer
the can occurs primarily by conduction. This holds
or semi-solid foods for which the convection
for
currents
inside
solid
inside
the can are insignificant. Many of the liquid canned foods, on
the other hand, have pH less than 4.5, so
requirements for
these
foods
are
not
thermal processing the convective heat
40
that
severe.
transfer
sterilization
Also,during
coefficients
41
at the surface of a can are very high, thus
assume that the temperature at
the
can
enabling
surface
one
equals
to
the
retort temperature.
Heat conduction inside the can is governed by
the
equa-
tion,
, T(y',t')/
t = V2 T(y',t')
(4.1)
with appropriate boundary conditions on the time
and
spatial
domains. Thus,
T = T i at
t = 0
(4.2)
and, at the planes of symmetry
in the spatial domain, we have
'V T = 0
where
(4.3)
is the unit outward normal vector.
At the external boundaries of the spatial domain,
T = TR (t')
(4.4)
The retort temperature TR(t), which is the variable to be
controlled, affects the
system
behaviour
boundary condition (4.4). Denn et al.
only
(1966)
solutions to problems where the control may
through
have
operate
the boundaries. Here, however, we find it more
apply the minimum principle by transferring the
the
discussed
only
at
convenient
to
control
from
42
the boundaries to the system equations. For
this
a
purpose,
new variable T2 (y',t') is defined as follows:
T2(Y',t') = T(y',t') - TR(t')
(4.5)
The heat conduction equation is now modified to read
~T2(Y',t')/
t' = V 2 T 2 (y',t') - dTR/dt'
(4.6)
with the initial condition
2
= Ti -
TR(t'=O)
(4.7)
at t'=O
At the planes of symmetry, we have
_.VT
= 0
2
and at the boundaries
(4.8)
of y',
T2 = 0
(4.9)
This formulation transfers the problem inhomogeneity from
the boundary conditions to the differential
itself,
equation
and this can have some advantages in the eigenfunction
sion solution of the problem.
expan-
It is interesting to note
now the rate of change of retort temperature u',
or
should be considered as the control variable rather
that
dTR/dt',
than
the
concentrations
are
retort temperature itself.
The nutrient and the micro
governed by the equations,
organism
43
3C N
/
t' = - Ko,N.CN exp(-EN/RT)
(4.10)
= - KO,M.CM exp(-EM/RT)
(4.11)
and
CCM /
t
respectively. The initial conditions on the nutrient and micro
organism concentrations are:
(4.12)
CN = CNo at t'=O
and
(4.13)
CM = CMo at t'=O
respectively.
Table 4.1 describes
which appear
in
the
the
variables
formulation
of
and
system
the
parameters
equations.
In
dimensionless form, the system equations can be represented as
dX1
/ dt = u
X2 / at =
DX3 /
(4.14)
2X2 - u
(4-15)
t = - a 1.X 3 exp[-E/(X1 +X 2+1)]
X 4 / at = - a 2 .X4 exp[The initial
and
boundary
(4.16)
E/(XI
1+X 2 +I)]
conditions
(4.17)
on
the
variables are given as follows. At t=O, we have
dimensionless
44
TABLE 4.1: VARIABLES AND PARAMETERS FOR SYSTEM EQUATIONS.
Variables/Parameters.
Dimensional
Time
t'
Characteristic
Length
L
Space
y'
Temperature
T(y',t')
Retort Temperature
TR(t')
Initial Temperature
Ti
1
y =
Initial Nutrient
Concentration
CNo
Micro organisms
Concentration
C ('
Initial Micro org.
Concentration
CMo
Activation Energy
Nutrients, Micro org.
Ea
EN EM
X1=(TR
-
Ti)/ T i
0
t')
X 2 = (T - TR)/ T i
X 3 = CN/ CNo
1
t')
X 4 = CM/ CMo
1
E = Ea/RTi
= E /(X 1 +X 2 +l)
Exponential Term
Reaction Rate
Constants
'/ L
X1+X2
T - TR
C ('
L2
t =t'/
Temperature Difference
Nutrient Concentration
Dimensionless
K
a = KoL2/
Contd.
45
TABLE 4.1 (Continued)
Variables/Parameters
Rate of Change of
Retort Temperature
Dimensional
u'= dTR/dt'
Thermal Conductivity
oC
Ratio of Activation
Energies
F
Dimensionless
u = dXl/dt
= E /E
M N
46
X1
X2 =
X
3
(4.18a)
= X10
-
(4.18b)
X1 0
= 1
(4.18c)
= 1
(4.18d)
and
X
If the initial retort temperature
hotfill temperature of
the
is the
cans,
then
same
X10
as
will
the
inlet
be
zero.
Boundary conditions are required only for X2. At the planes of
symmetry,
Q.VX 2
(4.19)
= 0
and at the external
boundaries
of yI,
(4.20)
X2 =
The system is autonomous, i.e.
not
explicitly
dependent
on
time t. In shorthand notation, it can be represented as
ax/ at = f[x,
,
(4.21)
v 2 X2 ]
The objective is to maximize the nutrient retention
the entire can during sterilization.
minimizing the cost function J, where
This
is
equivalent
over
to
47
J = 9
(-
(4.22)
X3 ) dy dt
or
J =
5
t=o y
2 +1)]
fa 1 .x 3 exp[-E/(X+X
processes,
sterilization
In most
final
on the average
it
is
essential
micro
of
concentration
to
Then
level.
organism
achieve a specified reduction in micro
the constraint
(4.23)
dy dt
organisms can be described as
5x
(/V).
4
dy < C 1
(4.24)
Typical
where V is the dimensionless volume of the container.
values of C 1 may be in the range from 10- 5 to 10-10
.
4.2 OPTIMALITY CONDITIONS USING THE VARIATIONAL APPROACH
optimi-
The general form of the necessary conditions for
zing a
distributed
chapter. The aim in
system
this
was
presented
section
specific necessary conditions
for
will
in
to
be
maximization
the
previous
the
develop
of
nutrient
using
retention by considering the dynamics of the system and
the principles of variational calculus. One
dimensional
geometry is considered first to keep the mathematics
However, a logical extension to two and three
slab
simpler.
dimensions
can
be conveniently made. The spatial variable y has domain [0,1].
48
The Hamiltonian
H =
+
as
(4.25)
T f
where P(t) is
represents
and
H is defined
the
distributed
costate
variable
the right hand side of the system
is the
integrand
of
the
cost
vector,
equation
function
f
(4.21)
defined
by
equation (4.23). Hence the Hamiltonian can be written as
H = alX 3 exp[-E/(X 1+X 2+1)]
+ P 1 u + P 2(
D 2X 2 /
P 3 (-alX3 exp[-E/(X1+X 2+1)]) + P4 (-a2 X 4 exp[-
y2
_ u ) +
8E/(X1+X 2+1 )])
(4.26)
The state equations (4.14) to (4.17) are adjoined to
cost function via
the
costate
variable
vector
P
and
the
the
constraint on the final concentration of micro organisms via a
Lagrange multiplier
. The modified cost function can then be
written as
J
= [ SX4 dy - C1]t=tf +
+ P1 (u - dX1 /dt)
i
aX 3 exp[-E/(X1+X2+1)1
+ P2 ( a2X 2 / ay2 _ u -
+ P3 (-a 1 X3 exp[-E/(X 1+X2 +1)] + P4 (-a2 X4 exp[-.BE/(Xl+X 2+1)] -
2/
t)
X3 / )t)
X4 / at)
I dy dt
(4.27)
49
which can be expressed in terms of the Hamiltonian as
J = U [
S'
4
dy - C 1] t=tf +
f
§§[H- PT(
X/ a2t)] dy dt
(4.28)
In the following analysis, the process time tf is assumed
to be a predetermined factor having a fixed value, so that
no
variations in tf are considered. Then one can obtain the first
variation
in J by varying X, Xyys u and P. Thus
I
S
t
X 4 dy
I
I[[
t=tf +
o
_ ( sp)T(
$2X2/;y2
has only one
non
H/ aX+
(_p)T DH/ aP
O
T
+ ( Su) H/Du + ( i y)
Here Xy
X)T
H/Xyy
-
PTD( X)/ at
X/ at)] dy dt
zero
component,
(4.29)
namely
X2,yy
Note that
pT ( $x)/Dt =
[PT(
tX)/
- ( X)T DP/ t
(4.30)
Also, consider the terms
)[( X2) ( H/aX2 ,yy)/?y]/
[ ( DH/
2,yy)/y] + (
ay = [
2)
( SX2 )/ ay].
2
(9H/ X2,yy)/&Y
The first term on the right hand side of equation
be expressed by using another variational relation
(4.-31)
(4.31)
can
50
[ 11(
X2)/ ay]
I Z3(
D ( L20H/ 2)
-')X2,yy) / ..)Y
; ( Sx2)/ sy] /ay
.H/
( 'SX2, yy)
Combining equations (4.31) and
X2, yy
and
(4.32)
2, yy
(4.32)
rearranging,
one
obtains
(
X2,yy)
(
X2 ) 2 ( ?H/ aX2,yy
DH/ aX2,yy
'a ()H/
;IX2,
y)
.
a( Cx2)/ y] / s +
a[ ( Sx2) . ( aH/ ax2,yy) /y]
/) ;Iy
/ ay
(4-33)
The expressions given by equations (4.14) and (4.17)
incorporated into the variation
SJ
of
are
(4.29)
equation
to
obtain
tF
SJ=
> SX
4
dy'
t=tf
+
(
D
+ (u)
H/ u +
[(
H/
)Tp/ at -
aPT( S]/
+ ( PT
H/ a P
$
2,y)
( (x2)a2( H/ x:I
2, yy V a 2
+ (
aH/
)
D(
SX2 ) / a;Y]/'"
+
1. ) ;)(2a / DX2,
yy)/ ar/
t
(
pT(
DXI at)
I
aI
dydt
(4-34)
For the first variation in J to be zero, the coefficients
of the independent variations,
( P) , ( X) and
u must be
zero, which leads to the following necessary conditions:
D X/ aIt =
H/
P = f
(4-35)
51
aP/at
y2
- 2( H/I
a6)/
/
-
(436)
(4.37)
H/ au = O
and
The second
term on the right hand
namely 2(
H/
side
equation
_Xyy)/ay2 is non zero only
X 2. Also, strictly speaking, equation
only if the variations in u
constrained
of
domain
are
for
(4.37)
allowed
to
the
will
be
since u is a
for u. Secondly,
variable
valid
be
within
the
function
of
(3.25)
will
apply. i.e. since the control variable u does not change
over
of
time alone, a necessary condition
the
type
(4.36),
the spatial domain of y, the Hamiltonian H need
be
minimized
only over the entire domain of y at any time t, rather than at
each point in y. This means that equation (4.37)
will
modify
to
{
S Hdy}/u'(-H/=
(4.38)
u) dy = 0
o
S
or more generally,
H[X*(y,t),
( 2
y2)* ,y,
(t)] dy<
t,
S[I(yt),,( ;X2/Qy2)
,
y, t,u(t)]dy
Next, note that the Hamiltonian as defined by equation
(4.39)
(4.26)
is linear in the control variable u, so that
BH /
u = ( P1 - P2 )
(4.40)
52
The equation (4.38) cannot yield an optimal value of
aH/au is independent of
policy
is required.
u,
and
hence
The constraint
on
a
u
bang-bang
the
rate
since
control
of
rise
of
retort temperature, u, will be of the type
(4.41)
Umin < u < Umax
where umax corresponds to the maximum rate of heating and Umin
corresponds
to the minimum
rate of heating
(maximum
rate
of
cooling). The desired control policy will then be of the form
u = umax if
SD
/H u dy =
and u = Umin if
H /u
S(P1-P2) dy < 0
dy =
§P1-P2)
dy > 0 (4.42)
Switching(s) in the control will occur at point(s)
term I
where
I =2(P1-P 2 ) dy] is equal to zero. For the existence
the
of
a singular arc, the term I must remain zero continously over a
certain time period. This will be
discussed
in
some
detail
later.
It is readily demonstrated that the Hamiltonian
minimized
only
over
the
entire
(4.39)] and not at each individual
spatial
domain
need
[equation
point in the domain
Consider for example, a spatial discretization of
be
the
of
y.
system
equations (4.14) through (4.17). At each time interval a given
partial differential equation is converted into
a
coupled
the
ordinary
differential
equations.
If
number
of
minimum
53
principle developed in the preceding
chapter
is
applied
this new, lumped model, an equivalent optimal control
found. The Hamiltonian at each time interval will be
of contributions from
each
ordinary
differential
Thus the condition for the global minimization of
to
can
the
be
sum
equation.
Hamiltonian
will indeed yield equation (4.39) as the number of discretizations goes to infinity.
The transversality conditions are obtained by setting the
remaining terms in equation (4.34) for
SJ to zero.
Thus
one
obtains
[
4
dX
dYt
f
f
t
[
(x)
I'
X)dy]
-
e4
+
b
Cc~H/
(
H/
X 2,). (
2x
)dt]
X2 )/ y
dt
= o
(4.43)
C
Terms inside each of the square brackets must be
zero,
which
leads to
P1 (tf) =
(4-44a)
P 2 (tf) = 0
(4.44b)
and
P 3 (tf) = 0
(4.44c)
Also, P4 (tf) = V
(4.45)
54
Since X is specified at t=O, ( X)
Note that
'y= O at
X2 /
is uniformly zero
y = O and X 2 = 0 at y =
1
at
t=O.
so
that
the transversality conditions on P2 become
X2,yy
DH/
a (
H/
= P2
= 0
at y = 1
a2, yyP = y
/
(4.46)
= 0 at y = 0
2
(4 47)
Note also that the first necessary condition, equation (4.35),
gives back the system state equations. The governing equations
for each of the costate variables are:
aP1
/
t = -
(1-P 3 ).a1 X 3 exp[-E/(X1 +X 2+1)]. E/(X1+X 2+1) 2 +
p4.a2 .X 4 exp[-BE/(X 1+X
aP2 / at
=-
2
1 )].
BE/(X
1 +X2 +1
)2
(4.48)
(1-P3 ).a 1 .X 3 . exp[-E/(X1 +X 2+ )]. E/(X 1+X 2+1) 2 +
P 4 .a 2 X 4 exp[- BE/(X 1+X 2+1 )]PE/(X1+X
2+ 1 ) 2
_
2P2 / Dy2
(4.49)
which is equivalent to
aP2 / at =
P1l/ t -
2P
2/
y2
DP3/ t =- (1-P3 ).a1 exp[-E/(X+X2+1)]
(4.49a)
(4.50)
and
laP4/
t = P 4.a
2
exp[- BE/(X1 +X 2+1 )]
(4 51 )
55
4.3 COMMENTS ON OPTIMALITY CONDITIONS
The complete system of canonical equations
by equations (4.14) through
(4.17)
for
is
state
described
variables
equations (4.48) thru (4.51) for costate variables P
minimization
of the Hamiltonian
Boundary conditions
and
(4.42)
initial
for
the
conditions
and
the
control
for
the
X,
u.
state
variables are given as follows.
At y = O,
X 2 /ay (O,t) = 0
at y = 1, X 2 (1,t)
At
(4.19a)
= 0
(4.20)
t = 0,
X1 (0)
=
(4.18a)
X 2 (,O)
= X2in
(4.18b)
X
= 1
(4.18c)
= 1
(4.18d)
3
(y,O)
X4 (y,)
The 'initial' conditions on the costate variables are
time t = tf, and are given by
equations
while the boundary conditions for P2 are
(4.44)
given
and
by
(4.46) and (4.47). Note that the Lagrange multiplier
at
(4.45),
equations
X
is
an
unknown parameter, for which there is an additional constraint
equation of the form (4.24) with the
equality
constraint
as
56
the limiting
case. i.e.
(4.52)
5x 4 dy = C 1
(1/V)
$
Some observations are in order. Integrating the
equation
(4.16) from zero to t, one gets
t
X3 (y,t) = exp
I
a1 exp[-E/(X1 +X2 +1)] dt
-
(4.53)
I
D
Let P3' = (1-P 3 ), so
that
the
governing
equation
for
P3'
becomes
?P3'/t
= P3 'a1 exp [-E/(X1
(4.54)
+X 2 + 1 )]
with
P 3 '(tf)
and
= 1,
integrating
tP'(t
=
-
the preceding
obtains
equation
exp exp[-E/(X 1 +X
P3'(t) = exp
-
2
1)]
a1 exp[-E/(X1+x2+1)]
from t = tf to
t,
one
dt
t
(4-55)
Using the fact that
+·
g dt =
tF
g dt -
t
g dt
it is easy to show
P3 '(y,t) = X 3 (y,tf) / X 3 (y,t)
or P 3 (y,t) = 1 - X 3 (y,tf)/X 3 (y,t)
(4.56)
(4.-57)
57
and
Similarly, it follows that for the state variable X 4
the
costate variable P4, we have
X4 (y,t).P4 (y,t) = X 4 (Y,tf).P 4 (y,tf) = f(y)
(4.58)
Equations (4.57) and (4.58) represent a key property
for
of
the
product
the costate variables, namely that the inner
state and costate variables is time invariant. This is similar
to the condition
described
by
for
(3.15)
equation
to
models. These equations also eliminate the need
lumped
integrate
two of the costate variables backward in time, or they can
used to provide a check
on
the
of
accuracy
be
numerical
the
integration backward in time for the costate variables.
4.4 CONSTRAINT ON THE RETORT TEMPERATURE
Most of the sterilizers
operate
in the food industry
in a
certain range between a maximum and a minimum temperature.
many cases, the minimum temperature of the retort is
In
anywhere
from 70 to 100 degree C, some times equaling the inlet temperfor
atures for the cans. The maximum temperatures
continuous
or batch retorts vary from 125 to 140 degree C, and seldom
do
they exceed these limits. Clearly, the maximum temperatures at
any point inside the can will be
Excessively high
localized
temperatures
'cooking'
of the food.
well
must
It
within
be
these
limits.
to
prevent
avoided
will
be
essential
to
58
incorporate a constraint on the dimensionless
state
variable
X 1, of the form,
b1
X1 4 b2
(4.59)
Constraints on the state variables can
mally using
the
penalty-function
be
approach
treated
[Bryson
for-
and
Ho
(1975), Sage (1968)]. For the constraint described by equation
(4.59), we define
a
new
variable
X5 ,
whose
dynamics
are
governed by
aX5/ t = (b1 - X1 ) .(b
1
- X 1) + (b2 - X1 ).t((X 1 - b2)
(4.60)
where the Heaviside step function
Yj
is defined as
})(f) = p for f>O and
3-(f) = 0 for f<0
(4.61)
X5
It can be immediately seen that
is
the
accumulated
penalty for violating the constraint. The quantitative measure
of the penalty is given by a positive number p which will have
a larger value the
more
stringent
the
constraint.
constraint is to be always satisfied, we should
X 5 (tf) = O. The deviation
the penetration
into
in X 5 (tf) from zero
the
forbidden
domain.
If
ideally
will
have
represent
Adjoining
system equation (4.60) to the cost function and the
the
the
Hamilton-
59
ian of the original problem via a new costate variable P5, one
obtains a new Hamiltonian H',
H' = H + P
(bl-X 1) - (bl-X 1 ) + (b 2-X 1 ) f(X-b
)
] (4.62)
2
The costate equation is given as
3P5/
t = 0
(4.63)
There are no initial or final conditions on P5, while
X 5 (t=O) = 0
(4.64)
and ideally, X 5 (t=tf) = 0
(4.65)
(4.63), one can see that P5 = constant.
From equation
value of this constant should be chosen so as to
X 5 satisfies
equations
ensure
The
that
(4.64) and (4.65).
Figure 4.1 shows a portion of a control policy where
of the switchings
occurs at t=ts, for
the
straint on the retort temperature. The
and temperature profiles are
consider
a case where
a
shown
constraint
case
of
no
corresponding
as
dotted
of
the
imposed on the surface temperature of the
can.
con-
control
lines.
form
one
Next,
(4.59)
We
can
consider three possibilities, namely u>O, u=O or u<O for
but sufficiently
close
retort temperature
X1
to t 1. For the
will
be
first
greater
case,
than
b2
is
now
t>t1
u>O,
the
and
thus
(X1 -b2 ) will contribute to the penalty X5, given by equation
(4.60). Clearly then X5 (tf) will
be
greater
than
zero.
By
60
Fcr
a:
-J
0n-
z
0L)
LLJ
z
0
0
t1
t$
t2
tf
T IME
FIG. 4.1 Modified Control
for Constraint
on the Retort Temperature
61
contraposition, in order for X 5 (tf) to be equal to
constraint must always be satisfied,
cannot be greater
the
i.e.
Xl<b2
. Hence
u
In
fact,
this
a
than zero for t=tl+.
without
is
For
analysis.
trivial example of the use of penalty function
this case, one could easily argue,
zero,
aid
the
of
the
penalty function approach, that in order for the constraint to
be always satisfied, u must be less than or equal to zero
for
on X 1 is satisfied,
the
t=t1 +. Again
as long as the constraint
Hamiltonian H' defined by equation (4.62) will be the same
as
the Hamiltonian H for the unconstrained case.
It is implicitly assumed that
zero, which must be the case for
umin
min
will
be
less
corresponding
than
to
the
maximum rate of cooling. The control variable u must be chosen
so as to minimize
the
Hamiltonian
(4.26) over the entire spatial
H,
domain.
defined
Note
by
also
equation
that
the
coefficient of u in the expression for 5 H dy, namely the term
I [I = ~ (P 1-P 2 ) dy], is negative
at time t = t1
(point
A
in
figure 4.1). Since the term I is a continous function, it will
continue to be negative for t>t1 but sufficiently close to t1.
t=t1 +,
its
contribution to the Hamiltonian will be a positive number
and
thus the Hamiltonian cannot be minimized by selecting u to
be
less than zero. This leads to the conclusion that
be
Hence if u is chosen to be
less
than
zero
for
u
must
zero after t=t1 , which means that the retort temperature
remain constant at b 2. This will in turn
modify
the
must
profile
62
for the integral
term I, so that it may become
zero
at
time t, not necessarily equal to ts. The switching
some
to
u=umin
the
lower
constraint Xl=bI is approached from above. It should be
noted
will occur thereafter.
A similar analysis holds for
that the contribution of u to
the
the
case
term
equal to zero when X1 is on the boundaries
This is however different from
the
usual
when
.H.dy
is
of the
uniformly
constraint.
case
of
control . In singular control, the contribution of
singular
u
to
the
Hamiltonian is driven to zero because the coefficient of u
is
zero along the singular
of
singular arcs
the
arc. More importantly,
Hamiltonian
can
not
in the case
be
minimized
with
respect to the choice of u, as opposed to the above case where
u=O is an optimality
condition
for minimizing
the Hamiltonian.
The possibility of singular arcs must not
either in the above case or in the
case
where
be
overlooked
there
is
no
constraint on X 1. For a singular arc to exist, one must have
d/dt[
S(P1-P
2)
dy ]
O
(4.66)
over a certain range of time. However this is very unlikely to
occur since the system state and costate equations are
highly
nonlinear with several exponential terms and partial derivatives with respect to spatial
coordinates.
It
will
difficult to foresee a situation wherein the integral
be
very
term
I
63
is continously kept zero by simultaneously adjusting different
state and costate variables (Tenney, 1982).
The canonical partial differential equations described in
this chapter are coupled, nonlinear and distributed, for which
a complete analytical
solution
is
not
solutions often involve discretization
possible.
of
the
Numerical
partial
ferential equations and iteration on the resulting
two
difpoint
boundary value problem. This is dealt with in the next chapter
along with a discussion on the
slab geometry.
results
for
one
dimensional
5
CHAPTER
NUMERICAL AND ANALYTICAL SOLUTIONS
Optimal control of distributed parameter systems involves
the solution
of
a
equations. These are
system
of
partial
and
state
canonical
costate
equations,
differential
often
at
coupled and non linear, with boundary conditions specified
different ends of the time
domain
for
different
variables.
most
Clearly, numerical solutions are the only choice for
these kinds of problems. A procedure
for
tions is presented in this chapter.
This
computa-
numerical
is
switchings.
tions for single switching are compared with
tiple switchings, thereby providing
bang-bang
control
with
single
a
case
a
of
solu-
Numerical
for
mul-
evidence
that
those
strong
switching
by
followed
closed form solution to the state equations, for the
bang-bang control with multiple
of
is
the
optimal
solution.
5.1 COMPUTATIONAL STRATEGY
It was shown in the preceding chapter that the
of the Hamiltonian with respect to
the
control
u
linearity
leads
bang-bang control where the control now operates only
boundaries of the admissible
domain.
64
We
first
on
consider
to
the
a
65
one
solution to the problem described in terms of the
dimen-
sional slab geometry with no constraints on the state variable
X1 .
It will be possible
to extend
the
ideas
with
case of cylindrical can geometries
to
further
the
temperature
surface
constraints.
The governing state, costate and control equations, which
were derived
preceding
the
in
collected form in table 5.1 .
presented
are
chapter,
in
condi-
The associated boundary
tions on the state and costate variables are outlined in table
5.2 .
There
X 3 (yt),
are
X 4 (y,t),
nine
variables,
X 2 (y,t),
X(t),
namely,
P 1 (ySt), P 2 (y,t), P 3 (y,t), P4 (y,t) and u(t);
which are to be solved using the nine equations in table 5.1 .
4 are known at t=O, while
Note that the state variables X 1 to
the costate variables P1 to P3 are
costate variable
P4 is unspecified
at
specified
at either
t=tf.
end. It is
The
equal
the
integral
constraint on the final micro organism concentration
equation
by
equation
to an unknown
at
t=tf,
(4.24)]. The optimal
which
control
u
evolves
is
from
determined
(4.42).
Spatial discretization is necessary to convert the
system of partial differential equations to a set of
given
ordinary
differential equations. Walsh (1971) and more recently Houstis
et al.(1978) have reviewed the finite
difference
and
finite
element methods for solving multidimensional partial differential equations.
Both finite
difference
and
finite
element
66
SYSTEM
TABLE 5.1
EQUAT IONS
I. FOR STATE VARIABLES
(4.14)
dX 1 / dt = u
ax2/14t =
2
(4-15)
u
(4.16)
;X3 / t = - a 1 .X3 exp[-E/(X 1+X 2+1)]
t = - a 2 .X4 exp[-
'X 4 /
i.
FOR COSTATE
3P1 /
t = - (1-P 3 ).al.X
VARIABLES
3
expr-E/(X1 +X2 +1)]1
P4 .a 2 .I
4
.I.
exp-
expf-E/(I1+X 2+1)].
E/(X1+X2+1)].E/(XI +X
2
2+1)
t = P4.a2
E/(X1 +X2+1 )2 +
_ 2P2/
ay2
(4.51)
FOR THE CONTROL VARIABLE
u = Umax
if
a.nd u ==umin i
dy =
/u
S
SE
/
u dy =
(P 1 -P 2 ) dy <
P1-P2
(4.49)
(4.50)
E/(X1+X2+1 )]
exp[-
+
(4.48)
=- (1-P3).a1 exp[-E/(X1+X 2+1)]
P3/at
PD4/
3.
t = - (1-P 3 ).al.
E/(Xl+12+1)2
E/(X 1+X2 +)2
P4 .a 2 .X4 expr-, E/(X1+X2+,).
aP2/
p
(4.17)
BE/(Xl+X2+1)1
)
dy > 0 (4.42)
67
TABLE 5.2: INITIAL, TERMINAL AND BOUNDARY CONDITIONS
FOR SYSTEM EQUATIONS
(A) Initial Conditions:
At
t = 0,
X1 = X10
(4.18a)
X 2 = -X10
(4.18b)
1
(4.18c)
X4 = 1
4
(4.18d)
X 33 =
(B) Terminal Conditions:
At
t = tf
P11 = 0
(4.44a)
P2
(4.44b)
= 0
P3=
0
(4.44c)
(4.45)
P4
p =
1
V' X4 dy
C1
(4.24)
(C) Boundary Conditions:
At y = 0,
( DX 2 /y)
(
= 0
P 2 /Dy) = 0
(4.19a)
(4.47)
At y = 1,
X2
= 0
(4.20)
= 0
(4.46)
68
methods were tried in this
work.
In
the
finite
difference
method, the spatial domain was divided into ten equally spaced
intervals for the spatially distributed variables X2 (y,t)
P2(y,t), while for the rest,
five
were used. For the
finite
Galerkin
equally
spaced
element
intervals
using
approach
into
bilinear basis functions, the spatial domain was divided
four intervals
of
.4,
width
.2
.3,
.1
and
respectively.
fourth
Integration in the time domain was done using a
the
Runge-Kutta-Gill (RKG) method. Details of
and
RKG
order
algorithm
are given by Finlayson (1980).
Brown (1979) gives a detailed discussion on
the Galerkin finite element method
with
use
of
kinds
of
the
different
basis functions. While this code would be highly accurate
two or more spatial dimensions, it offered
negligible
tage in terms of accuracy for the case of the one
It
slab geometry.
the
requires
algebraic equations at each time
and
step
considerable amount of computer time.
The
code, on the other hand, was easier to
time for computation and
was
more
thus
finite
formulate,
accurate
advan-
dimensional
a
to
solution
for
with
of
system
consumes
a
difference
took
a
less
higher
number of meshes than those used for finite elements. Hence in
the
subsequent
analysis,
the
finite
code
was
developed
for
difference
retained.
A
fifth
order
quadrature
formula
was
averaging the nutrient and micro organism concentrations
over
69
the entire volume. By this formula,
I
N
f dy = h
(5
Af(
Here N is equal to six for five equally spaced intervals, each
of width h=.2 . The f(Yi) are the values of the function f
at
each of the nodes. The coefficients A i were evaluated to be:
A1
= A6
=
.329861
A 2 = A 5 = 1.302083
A3 = A4
.868056
accuracy
This quadrature scheme provides significantly higher
than the lower order formulas such as Simpson's
or
rule
trapezoidal rule, especially when steep gradients or
the
exponen-
tially decreasing functions are involved.
The general strategy for computation is as
follows.
reduced
system of canonical partial differential equations is
to a set of 53 ordinary differential
equations
( one
X1;
for
six each for X 3,X 4,P 1,P 3 and P4; eleven each for X 2 and P2
We begin by assuming a single switching point
at
The
)
where
t=t1
the control u changes from u=umax for t(t1 to u=umin for t>t1 .
Equations (4.14) to (4.17) for the state variables X1
X4 are integrated in the forward direction beginning
through
at
t=O.
Iterations are performed to correct the value of the switching
time t,
so that a desired final concentration
of
the
micro
70
This
organisms is achieved at t=tf.
state
equations
are
always
is
possible
independent
of
since
the
the
costate
equations, while the control u which affects the behaviour
the state equations,
is
in
turn
governed
by
the
of
costate
variables, namely equation (4.42). Next, the costate variables
P1 through P4 are integrated backwards in time, beginning with
t=tf. Note that the costate
variable
P4
is
unspecified
at
constraint
on
t=tf, which is compensated for by the integral
X4 , namely equation (4.24).
Figure
S(P1-P2)
5.1 shows
the plots of the integral
dy) as a function of time, for
the unknown
, where P4 (tf)=
analysis, the time
axis
is
different
. (Here and
rescaled
term
in
with
I
(I
values
the
of
subsequent
respect
to
the
process time tf.) We find that for large positive values of
the integral is always negative.
As we decrease
=
,
, we observe
a singular point (i.e. a point at which the integral I becomes
zero) at t=.9 for
=5 and at t=.75 for
=2.5. For
very
small
positive values, as well as for any negative values of v,
the
integral is observed to be always positive. One can infer from
these results
that it is possible
to make the term I equal
zero at a desired value of t1 by suitably choosing
Thus the general scheme for solving the system
tions outlined in table 5.1 would be to
integrate
equations
to
in the forward
direction
and
switching point t1 to obtain the desired
iterate
reduction
to
.
of
equa-
the
state
for
in
the
micro
71
1iC)
LI
Z
z
0
-10
-20
.0
·
.2
.8
.6
.4
1.0
TIME
F-ig. 5.1
Basis for Obtaining
Switching
a
Single
Point
72
organisms
The costate
at the end of the process.
are
equations
then integrated backwards in time to iterate for the value
for
the unknown . which yields the integral I positive
equal
to zero at t=t1
and negative
solution
sent a complete
to
for t<t1 .
t>tl,
This will
repre-
equations
canonical
the
of
with
boundary conditions described in table 5.2
cut
The above approach is a short
very well partly
because
of
the
behaviour
unique
costate variables described in section 4.3 .
A
way of solving a two
problem
point
boundary
value
works
which
method,
of
very
the
general
is
the
shooting technique. Keller (1972) describes this method for
system of two ordinary differential
two additional
(ODE's)
equations
ODE's need be integrated
on
condition for the second variable.
This
unknown
the
at
be
few hundred ordinary differential equations to
least
solved
is
convergence
a
at
computer
each iteration, would require a tremendous amount of
the
be
technique
search
in the present case. However, it would result in
a
initial
could
approach
extended to an n-dimensional Newton-Raphson
time and storage, and again
where
in time if one uses
Newton-Raphson algorithm to iterate
a
not
always
the
distributed
parameters model with several states, though much
theoretical
guaranteed. This is a
major
limitation
work has been done in this area.
The
of
computational
outlined earlier in this section, appears to be
way of solving this problem.
an
strategy
efficient
73
Figure 5.2 shows a plot of the term I for the case
fixed process time of 24 minutes,
values as noted in the diagram.
with
The
the
other
switching
required
reduction
the micro organisms. It is interesting to note
a
parameter
is
after approximately 5 minutes to achieve a 1/10
of
that
for
case of no constraint on the final concentration of the
in
the
micro
organisms, P4 (tf)=O, which makes P4 uniformly zero everywhere.
The results for this case have been shown in figure 5.3, which
illustrates that the integral I should always be positive
t(tf, or u should always be minimum for this case. This
indeed make sense,
retention with no
if
one
were
constraint
on
to
maximize
the
final
for
would
the
nutrient
micro
organism
concentration.
Once we are convinced
that
the
single
switching
represent a possible solution to the given set
we need not be concerned further with the
of
equations,
costate
equations.
This observation is based on the postulate that the
on
the
final
concentration
of
micro
does
condition
organisms,
uniquely
determines the switching point tl, and that there would always
be some value of
for which the integral term I would have
unique singular point at t=t1 . This reduces the
work to solving
only
the
state
equations
in
a
computational
the
forward
direction.
There are two other possibilities.
possible to have multiple
switchings
Firstly,
in
it
bang-bang
may
be
control.
74
.2
_.J
:
(
0.
w
z
-.2
0.
.25
-5
-75
1.
TIME
F i- - 5.
Condit ion for Optimal Switching
75
1.5
1.C
-J
z
0
0.
.25
.50
TIME
.75
1.0
Fig. 5.3 Condition for Switching for
the case of no Constraint on
the Final Concentration of
Micro Organisms
76
This is discussed in detail in the
subsequent
sections.
Generally
second possibility is that of a singular
arc.
any optimal control problem, it is
difficult
very
The
to
prove
the
mathematically the existence of a singular arc, except in
case of a few, simple, lumped models
(Sage,
1968).
However
this problem, the presence of singular arcs seems to
contain
unlikely, since the governing equations
linear, exponentially decreasing terms
so
it
difficult to achieve conditions whereby the integral
continue to remain zero for a finite
time
be
interval
is
I
in
very
several
that
in
non
very
would
(Tenney,
1982).
Figure 5.4 shows the optimal control
policy
point switching with no constraint on the retort
The
switching
occurs
approximately
process, and the maximum surface
halfway
temperature
X 1 =.12 (119 degree C). The dimensionless and
for
temperature.
through
the
corresponds
to
the
parameters used are:
a1 = 3.6 x 1011 , a 2 = 6.956 x 10 2 8
E = 25 ,
= 2.5 , Tin = 350 K
Umax = (dX1 /dt)max = .25 ,
min = (dX1 /dt)min =-.25
Process time = 30 minutes
L = 4 cm ,
C = .133 cm 2 /min.
single
dimensional
77
U
0o
Li
nHL
Ur
Um
0.
-50
.25
.75
1-0
TIME
FIG. 5-4
BANG-
BANG
CONTROL
: SINGLE
SWITCHING
78
It is interesting to observe
from
figure
5.5
how
increase in switching time from t=O to t=30 minutes
the
gradually
reduces the average micro organism concentration at the end of
the process. While a ten log cycle reduction can
by switching about
halfway,
only
an
be
additional
achieved
log
cycle
reduction would occur if the heating continues till the end of
the process. Clearly, for the fixed process time of 30 minutes
in this case the ten log cycle reduction
The
temperature
distribution
and
the
seems
best
micro
organism
and
log
cycle
After the switching occurs, the temperature in the
outer
nutrient concentrations corresponding to
ten
suited.
the
reduction are shown in figure 5.6 .
portions of the can begins to fall rapidly, while the contents
at the center of the can are still at
This leads to the attainment of
a
a
higher
desired
were
organism destruction in less time than
temperature.
degree
the
of
micro
can
heated
uniformly throughout to the retort temperature. Such a control
policy is in agreement with the high
short
temperature
time
process, followed by a rapid cooling of the products.
In our model, the maximum rates of
heating
and
cooling
are considered to be independent parameters, and
the
optimal
solution is found once these limits are known.
However,
the nature of bang-bang control, one should really
expect
increase in nutrient retention with an increase in the
of u.
from
an
limits
Figure 5.7 illustrates this behaviour where as much
as
79
4
^
rlu
U)
z
(5
0
0
10
()
(D
-1
> 10
O0
.25
.50
TIME
.75
Fig. 5.5 Final Concent ration of Micro Organisms
as a Fun cltion of
Switching
Time
1.0
80
C .-
z
m r~E
IU
L iE
z
0LQ?
o
Li
u
I
O
--
LLJ
w
u
n z
O
(
,
c
n
Do
3l nitv 3d i13i
1_
-
Ln
Ln
LLi
W
*n Li
Ein
1o
d
rO
0
0n
IC
lN31 l nN
V4SINv90
0831v
81
.16
A
I.
75
.14
Li
Z
.5 (Z
LU
I
z
.12
z
LO
.25
LL
.10
0.
0
·25
.5
.75
1.0
MAX. RATE OF CHANGE OF TEMPE RATURE
Fig.5-7 Effect of Variation in the Limits of
the Control u
82
50 percent increase in nutrient retention may be
one increases
the rate of heating
deg C/min) to about .75 (10.5
and cooling
deg
observed
from
C/min).
.225
(3.15
Correspondingly,
the switching time is seen to decrease with a rise in u.
that the marginal changes in the
optimal
switching time decrease rapidly with
as
retention
increasing
Note
and
limits
the
umax
and umin'
If we increase the
process
time,
there
is
scope
for
further reduction in micro organisms, hence the switching time
decreases as shown in figure 5.8, other
parameters
unchanged.
For example, a process time of 35
be
if
chosen
the
energy
cost
is
one
remaining
minutes
of
the
should
important
considerations.
Different nutrients in the food have different activation
energies.
For
those
with
lower
activation
energies,
the
reaction rate constant is also low, so that the net effect
that of a higher nutrient retention. This is shown
5.9
for
the
case
of
ten
log
cycle
in
reduction
is
figure
of
micro
organisms.
In many cases, because of the
may
observe
a
lower
and
temperature, in
which
case
an
physical
upper
the
constraint,
bound
control
on
the
policy
Umax, umin
or
zero
depending
on
takes
when
discrete
the
retort
should
modified as outlined in section 4.4 . This leads to
of dual switching, where the control
one
the
be
case
values,
constraint
is
83
14
w
I-
12
z
I
L
10
U0
8
30
45
PROCESS TIME
F g. 5.8
60
min.
Variation7 in Process Time
84
..
.1
Li
cr
.1
Z
Z
LL
C
vC
10
20
ACTIVATION
30
50
40
ENERGY
E
kcal/mol
Fig. 5.9 Nutrient Degradation at Different
Activation Energies
85
reached. Two typical cases are shown in figures 5.10 and 5.11,
where
the
upper
and
lower
constraints
are
respectively. Clearly, such a constraint on
the
perature represents a suboptimal case so that
in
effect
retort
lower
tem-
nutrient
concentrations will be predicted by our kinetic models.
To summarize, we have presented in this section a general
computational scheme to solve canonical equations for the case
of single point bang-bang control. There are several
indepen-
dent parameters affecting the nutrient retention, such as
process time tf, the maximum rates of
change
max and umin, activation energies of the
micro organisms and finally
temperature. Effects of each
the
of
of
these
temperature
nutrients
constraints
on
and
the
parameters
the
retort
has
studied in our computer simulation. Next, we wish to
analytical solutions to the state equations.
the
been
consider
Complete
closed
form solutions are impossible. However, once the nature of the
control u is known,
the
diffusion
solved for the case of multiple
equation
switching
points are known or can be assumed
and
if
(4.15)
the
iterated
can
be
switching
upon.
This
follows in the next section.
5.2 ANALYTICAL SOLUTION
In this section a general solution is developed
heat conduction equation (4.15), when the control
is
for
the
subject
86
Li
:
Ld
LJ
w1
H1
J0
z
L)
0
Fig. 5.10
.25
.5
TIME
.75
1.
Optimal Control for Upper Constraint
on7
the
Retort Temperatu re
87
1
W
L1
W
J
0
z
nT
O.
.25
.5
TIME
.75
1.
with Lower
Constraint on the Retort
Fig. 5.11 Optimal Control
Temperature
88
to multiple switchings. The single point switching or the dual
point switching (when there is
a
constraint
on
the
temperature) will be special cases of this solution. We
retort
begin
with the equation,
DX 2 / t =v2X2 - u
(4.15)
having boundary conditions
_.7 X 2 = 0 on the planes of symmetry
(4.19)
and
X 2 = 0 on the surface.
(4.20)
The corresponding eigenvalue problem will be
V2V n = n
2V
n
(5.2)
n
with boundary conditions
_.V Vn = 0 on the planes of symmetry
(5.3)
and
Vn = 0 on the surface.
(5.4)
Vn(Y) is an orthogonal function representing a solution to the
differential equation (5.2) with
associated
tions (5.3) and (5.4). (See, for example,
boundary
Myers,
condi-
1971.)
general solution to equation (4.15) can be written as
The
89
00
X 2 (y,t)
= Z
<X 2 ,Vn>.Vn(y)
(5.5)
nl-
where <a,b> denotes an inner product over the
entire
spatial
domain v, and is defined by
<a,b> = §a.b dv
(5.6)
For the one dimensional
Vn(y) =
slab geometry,
we have
cos( ny)
(5.7)
and
Xn = (2n+1) T/2
(5.8)
Multiplying equation (4.15) by Vn
and
integrating
over
the volume of the container, one obtains
( X2/)t)Vn dv =
72X2Vn dv -
uVn dv
SX2.V2Vn dv -
Vu.Vn
dv
i
V
(5.9)
V
or
I(~X 2 /$t)Vn dv =
which follows on integration by parts twice. With the
(5.10)
aid
of
equation (5.2), equation (5.10) can be reduced to the form
d(X2 ,Vn>/dt = _-n
2
<
2 ,Vn>
- u< ,Vn>
This equation has a solution
(5.11)
90
<X 2,
Vn >
= exp(-\ n 2
t) [<X2'Vn>t=O -
(1,Vn> ~ exp(An2t
')
u(t')
(5.12)
dt']
O
where, for the control policies considered here, the
side is readily evaluated. Thus,
on the right-hand
the kth switching time
Sexp(
n2
t') u(t')
integral
if
tk
is
we have
dt' = (l/
n2 )
E
-
ukl[exp(nftk)
0
exp(n 2 tkl]
+ uN [exp(
2 t)
- exp(An2 tN)]I
in
where uk_i is the control value
interval
effect
(tk l,tk). Also, to = 0 and N =
suitable rearrangement
of
the
terms
(5.13)
during
max{kl
in
the
the
tk<tl.
time
With
summation
in
(5.13), the final solution (5.5) can be written as
oo
X 2 (Y,t) = 7
-
(1/n 2)uN
Vn(Y)<1,Vn>[X2 0 exp(-\n2 t)
2t)uo.exp(-An
1
(Uk-Ukl).exp(-1n[t-tk])
(5.14)
The dimensionless retort temperature will be
x (t) = X10 + L
k- i
Uk-li(tk - tkl)
The nutrient and the
expressed
as
micro
+ uN.(t - tN)
organism
concentrations
(5.15)
can
be
91
t
X 3 (y,t) = exp
Sal
a- exp[-E/(X1+X 2+1)]
dtl
(5.16)
and
X 4 (Y,t) = exp {- Ia 2 exp[-
E/(Xi+X2+1)] dtj
(517)
respectively.
The analytical solution eliminates the need
discretization which
is
required
canonical equations numerically.
to
solve
However,
essential to iterate on the combination
which
would
organisms.
give
desired
final
of
for
the
it
spatial
system
will
now
switching
concentration
of
be
points
of
micro
Substantial numerical integration in time is still
required if the analytical solution to the
used. In the present analysis,
we
have
heat
opted
equation
for
numerical solutions, rather than an analytical plus
is
complete
numerical
solution approach. Analytical solutions would be of great help
if any instability were to arise in the numerical
method
due
to a very fine discretization in spatial co-ordinates.
5.3 MULTIPLE SWITCHINGS: NUMERICAL SOLUTIONS
It was shown in the earlier part
of
this
chapter
bang-bang control with a single switching point is a
that
possible
solution to our problem of optimizing nutrient retention since
it satisfies the necessary conditions presented in tables
and 5.2 . It is worth stressing again that there can
be
5.1
more
92
than
ne solution to the given set of canonical equations, and
this
each such case would be a suboptimal control. The aim of
section is to explore numerically the possibility of
multiple
The
cases.
switchings which could constitute such suboptimal
optimal solution would be the one which maximizes the nutrient
concentration
at the end of the process.
One of the possibilities, not discussed earlier, is
of a zero point switching. In other words, if
is any upper
hout the process and if there
is
Such
reached.
a
once
is
solution
on
the
this
con-
mathematically
for
possible, if one recalls from figure 5.1 that
values of V, the integral I is uniformly
throug-
constraint
retort temperature, u will be equal to zero,
straint
u=umax
that
very
high
It
seems
negative.
possible to achieve the optimal nutrient concentration at
the
end of the process with such a control policy; however this is
not physically acceptable, since the containers must be cooled
down to the room temperature eventually, and
hence
least
at
one switching point is necessary.
Next, consider the possibility of two
switching
points.
For this purpose, several combinations of two switching points
could be considered.
The values of different
parameters
are
the same as those used for the case of single switching point.
We begin with the knowledge that for the single switching, t=
.48 as shown in figure
5.4
.
Obviously,
multiple switching, the first switching
for
point
the
must
case
be
of
less
93
than this value of t,
if
the
process
with
u=umax.
Figure 5.12 illustrates different combinations of two
switch-
ing points. As
the
first
switching
begins
point
t
(independent
variable) moves to the left and away from t 1 =.48,
switching point is
seen
to
approach
closer
the
to
second
the
first
switching point, primarily determined by the condition that
desired level of micro organism concentration is
the end of the process.
The corresponding
achieved
retort
a
at
temperature
profiles for the five combinations are also shown. Figure 5.13
shows the results of the computer
simulation
for
one
case,
where the two switching points are .468 and .664 respectively.
The final nutrient concentration for
tions of two switching points is shown
different
in
figure
combina5.14.
One
observes that as the first switching point moves away from the
optimal value for single switching, the nutrient concentration
continues to decrease. Clearly, the case of
single
switching
(t1 =.48), which is the upper most point in figure 5.14,
gives
the optimal nutrient retention.
Any sterilization process should begin with
heating
should end with cooling, hence it is desirable to have
at the beginning
of the process and u=umin at the end
process. This will limit us to consideration of
only
and
u=umax
of
the
an
odd
number of switching points. Consider, for example, the case of
three switching points, shown in figure 5.15. Here the
second
94
4
3
2
w
Ld
L
1
D
0-
1
Li
p-
C
U
--2
0
·25
.5
-75
1
TIME
Fig. 5.12 Bang-Bang Control
Switching
Points
:
Two
95
1
-25
10
Z
05
z4
6500
O
1 05°
0
U
10
1.
zL
-75)
.5
z
0.
.5
0.
DISTANCE
FROM CENTER
Fig. 5.13 Results for Two Swi tching
(Case 1)
1.
Points
96
12
,12
.11
z
z
.11
z
LL
.1C
.10
.420
.432
FIRST
.444
.45(5
SWITCHING
.468
.480
TIME
Fig. 5.14 Optimal Concentration Using Two
Switching Poi ntss
97
LL
c-
Li4
Li
5
4
3
0
25
5
75
10
TIME
Fig. 5.15 Optimal Control : Three Switching
Points
98
switching point t2 is held fixed at .48 and the first
ing point t1
is varied
from
.468 to .42. The
third
point is determined by the integral constraint
micro organism concentration.
The
resulting
concentrations for different cases
5.16.
are
Again, we find that the nutrient
switch-
switching
on
the
final
presented
final
nutrient
in
concentration
figure
continues
to increase as the conditions for optimal single switching are
approached. The two plots, obtained with different
time
step
sizes, also illustrate the need for very small time steps
for
a more accurate integration in time and a correct iteration on
switching points.
when the
second
Another interesting behaviour
switching
earlier, is changed (figure
time,
which
5.17).
This
deviation from the optimal conditions
and hence the resulting
nutrient
for
was
is
observed
held
constant
again
leads
single
concentrations
to
a
switching,
are
Also, the three point switchings seem to give higher
lower.
nutrient
retention than two point switchings in the same range.
Thus, there appears to be
point switching is the
strong
optimal
evidence
control
that
strategy
various combinations of single, double and
triple
studied. It can be inferred from the principle
of
single
among
the
switchings
optimality
(Athans and Falb, 1966) that, for the case of multiple switchings with
more
than
three
switching
points,
trajectory can always be broken down into
time
the
control
intervals
which two or three switchings occur. One could achieve a
in
more
99
.12
I
I
I
time step th=.0 0 0 4
z
w
.120
/ Mth .004
z
.115
I
-
I
I
.444
.432
_
.42
.456
TIME
S WI TCHING
FIRST
Fig.5.16 Optimal Concentration
-
_
.120
Li
z
wE
with Three
-
t 2 :A8,
z
i
A4T
c)2
.+
Points
Switching
*125
I
.468
J
/
/
.115
/
7-
//
/l
.11C
,
-
*432
-
.468
FIRST SWLTCHING TIME
Fig.5.17 Variation in Second Switching
Timet2 (3
Switching Points
)
100
optimal nutrient concentration if these two or three switching
point controls were replaced by
an
point
single
equivalent
switching which achieves the same final concentration of micro
can
argument further, one
switching will
always
be
conclude
better
that
single
the
any
than
this
Extending
organisms at the end of these time intervals.
point
combination
of
multiple switchings.
the
single
switching control, with or without a constraint on the
retort
Henceforth,
we
will
concentrate
only
temperature. The next step is to compare the
single switching model with
the
earlier
on
results
published
work in food sterilization engineering. This will be
the next chapter, using a cylindrical can geometry.
of
the
research
done
in
CHAPTER
6
TWO DIMENSIONAL MODELS
6.1 PRELIMINARIES
The optimal
control
developed
policy
the
in
earlier
puree
chapters is applied to the sterilization of canned-pork
a
in this chapter. For this purpose, we consider
reduction
can geometry and a five log cycle
organism.
zation process is aimed-at maximizing the
in pork puree. The
first
thermal degradation of
and
nutrients
average
The Sterili-
thiamine
retention
kinetics
irreversible
order,
the
Stearothermophilus
concentration of micro organisms. Bacillus
is assumed to be the main food spoilage
in
cylindrical
destruction
of
for
micro
organisms have been described by
dN/dt = -(2.303 N/Dref). exp[(T-Tref)/(z/2.303)]
as in
the
work
of
Teixeira
et
(2.3)
and
al.(1975)
Saguy
and
Karel(1979). The pertinent kinetic data and process parameters
listed in table 6.1 .
As a starting
point,
it is
worthwhile
nutrient retention attainable at a
temperature
certain
inside the can. This is shown in
101
to
estimate
constant
figure
the
uniform
6.1.
It
102
TABLE 6.1: PROCESS DATA
1. Can
dimensions:
307x409
(55/16
inches
diameter,
73/16
inches length)
2. Can name: A/2
3.
Product: Pork puree
4. Thermal conductivity of pork puree: .09226 cm2 /min.
5. Reference
6. D value
Tref = 121.1 degree
temperature:
for thiamine
at the reference
C (250
temperature:
F)
D
re f
178.6 min.
7. z value
8.
D
for thiamine:
value
for
the
z = 25.56 degree
micro
organism
C
at
the
reference
temperature: De
min.
ref
f = 4 m.
9.
z value
10. Desired
for the micro
reduction
organism:
of micro
z = 10 degree C
organisms:
5 log
cycles.
C1=10-5
For can specifications,
please
refer to Lopez, A. (1975).
i.e.
103
1i
z
0
Z
LJ
LU
cr
5
z
LU
zD
0
100
120
TEMPERATURE
Fig .6.1
140
°C
Maximum Nutrient Retention at
Constant Uniform Temperature
104
gives-an upper bound on the nutrient retention if the
retort temperature is
resistance, the actual
known.
maximum
Obviously,
possible
due
to
maximum
conduction
thiamine
retention
will be less than that predicted by the above criterion.
Teixeira et al. (1975) and Saguy and
Karel
(1979)
have
investigated optimal temperature profiles for sterilization of
pork puree with the process parameters as
outlined
6.1. They have assumed a constant process time of 89
Teixeira and co-workers observed that,
perature
profiles,
the
ramp
gives
among
the
in
minutes.
different
maximum
table
tem-
nutrient
retention. Their results are shown in figure 6.2.
2
2
2
W
i
19
4
I-
w
on
)
ThE (MINUTES)
Results from investigationof linear ramp functions,showing
percentthiamineorenrtion ersusindividual ramnp
policies.
Fig. 6.2 Results of Teixeira et al.(1975)
105
It is interesting to note that
the
distributed
for
principle which requires bang-bang control
leads to the same control policy
optimization,
are
there
when
maximum
active
no
The application of the
constraints on the retort temperature.
minimum principle to the distributed parameters model explains
why one must observe the optimum with the ramp function.
While the results of Teixeira et al. and Saguy and
are interesting, the exact
of
values
nutrient
maximum
the
Karel
retention should be viewed with caution, since the assumptions
the
made by these researchers concerning sterilization during
Teixeira
cooling process are very different. For example,
al.
assumed
that
the
of
destruction
organisms
micro
et
is
complete when the retort temperature drops below 107 degree C,
although the nutrient degradation
should
below this temperature; they did not account
degradation in their calculations.
to
occur
this
added
continue
Saguy and
for
Karel,
on
the
other hand, have aimed at maximizing thiamine retention at the
end of the heating
cycle
during
the
sterilization
(which is assumed to be complete when the
retort
process
temperature
drops below the inlet hot-fill temperature, 71 degree C). They
have neglected the nutrient
degradation
during
the
cycle, but have accounted for the destruction of micro
isms till the end of cooling.
cooling
organ-
106
These discrepancies in the manner in which
and nutrient degradation are
considered
sterilization
during
the
cooling
process, lead us to make some more justifying assumptions
and
to define the terms more precisely, as follows.
1. The destruction
of micro
dation is assumed to occur
organisms
by
a
and the thiamine
first
order,
degra-
irreversible
kinetics as described by equation (2.3), which will
be
valid
at least in the temperature range from Tmax to Tmin. Tmax
can
be taken as the maximum retort temperature (130-140 degree C),
and Tmin as the inlet hot fill temperature which in this
is 71 degree C. It is assumed that there is no further
case
degra-
dation or micro organism destruction below Tmin.
2. The sterilization process time,
or
briefly,
the
process
time is defined as the time for thermal sterilization, at
the
end of which the retort temperature, or
the
temperature at the surface of
water
temperature,
which
the
more
can,
precisely,
equals
in our case is taken
the
cooling
to be 25
degree
C. This change to cooling water temperature may be gradual and
continous in time, or may be a step change.
3. Once
the
retort
temperature
equals
the
cooling
temperature, the additional time required for the
water
temperature
at each point inside the can to drop below Tmin (71 degree C),
will be termed the cooling time. Normally, during cooling, the
107
from
retort-temperature
drops
temperature rather
rapidly,
so
to
Tmin
that
the
cooling
cooling
the
defined the cooling process to begin when the retort
drops
below
Tmin.
However,
time
we
will
use
zation process time and the cooling time.
note that some sterilization as well as
tempera-
the
definition. The total process time will comprise the
It is important
retort temperature drops from Tmin to cooling
water
ture , and during the cooling time.
'7
&.j
(1,1)
(0,0)
Fig. 6.3 Spatial Domain
-l
-.
(1.0)
-
to
degradation
nutrient
- __- - -
first
sterili-
will be observed towards the end of the process time when
(01 )
as
One could have instead
defined above will always be positive.
ture
water
V
-0
the
tempera-
108
For the two
dimensional
can
geometry,
the
conduction
equation (4.15) can be written as
X2 /at =
2X /
2
y2 + (1/y)(
where a is the ratio of
the
+ a.a 2 X 2/ az 2
2X2 / ;y)
diameter
to
the
length
cylindrical container. The spatial domain is shown
6.3
.
in
It is divided into a 10x10 mesh for numerical
by the finite difference method.
u (6.1)
-
The resulting
194
of
a
figure
solution
ordinary
differential equations are integrated in time using the fourth
order Runge-Kutta-Gill algorithm as before.
6.2 RESULTS
From our definition of the process time, it follows
that
this parameter will not be an independent quantity,
but
be determined by the fact that the
bang-bang
type with u (the rate of change
control
of
is
of
temperature)
discrete values of umax, umin or zero. Figure
taking
the
shows
one
6.4
such optimal control policy where uma x and umin are
be equal to 3.87
degree
C/min.
and
-
3.87
respectively. The initial retort temperature is
to fall after 68 minutes, and is
below
taken
C/min.
105.4
degree
C(265
temperature
the
to
degree
C(222-F) and it rises to a maximum of 129.6 degree
whereupon it is held constant. The retort
will
inlet
),
begins
hot
fill
109
3
J
0acrZ
0
U
- 3.
0
QZ
w
I-
x
0
W
m
Hi
0J
a:
I
r
viVl
.
I111111
Fig. 6.4 Optimal Control for
of Pork Puree
Sterilization
110
temperature
of 71 degree
C at
the
end
of
83
minutes.
process time tf by our definition is 95 minutes. The
ers need be held in
cooling
water
for
another
The
contain-
32
minutes
before the sterilization is complete, i.e. the temperature
at
each point inside the can is below Tmin
Figure 6.5 shows the radial distribution
at the center-plane (i.e. z=O) at different
of
temperature
There
times.
direction
negligible variation in temperature in the vertical
with steep boundary layers at the upper
and
surfaces.
lower
inside
Figure 6.6 shows how the nutrient concentration varies
the can at the end of the process
time tf=95
is
minutes
and
at
the end of total sterilization time of 127 minutes. There is a
central
significant drop in the nutrient concentration in the
region of the can during
the
cooling
process.
The
volume
average concentration of nutrient is seen to decrease by about
one percent during cooling. The average nutrient retention
at
the end of total sterilization is 43.6 percent for this
case.
at the end of the process
time
The volume
average temperature
tf is about 76 degree C. One of the limitations of the
models is that the sterilization is
assumed
when the mass average temperature drops below
this is not correct, since the central
continue
to
be
sterilization.
hotter,
causing
be
complete
Tmin.
However,
to
portions
further
lumped
of
the
degradation
can
and
111
U
0
Ld
Q
LJ
0-
.25
0.
RADIAL
.50
.75
1.
DISTANCE FROM CENTER
Fig.6.5 Temperature Distribution at
the Center-Plane
112
.70
.65
Z
LU
D
zp- -60
Z
0.
RADIAL
.6
-4
.2
DISTANCE
FROM
CENTER
.Fig. 6.6 Nutrient Degradation
Cool ing
Process
during
113
It is also not strictly correct to
nutrient
at the end of a fixed
retention
the
compare
average
time interval
of
before
heating cycle, since the higher the retort temperature
the
the completion of the heating cycle, the higher
to
retention will be. Refer, for example,
summarizes the results of
dimensional
models.
the
of
magnitude
1.93
degree
which
for
simulation
computer
in the second case, if we
As shown
umax and umin to be
nutrient
6.2,
table
by
reported
retention of 45.3 percent as
C/min.,
1979.) However, during the rest of
the
the
as
nutrient
highest
and
Saguy
two
choose
nutrient retention at the end of 89 minutes can be as high
46.21 percent. (Compare this value with the
the
Karel,
sterilization,
total
the average nutrient concentration reduces by 2.6 percent,
so
that the final nutrient concentration is 43.6 percent.
Figure 6.7 shows the variation in the process time tf and
the
the total time for sterilization as one increases
tude of umax and
cooling,
we
Umin.
move
With
closer
to
higher
rates
step
changes
temperature, as a result of which the
considerably.
total time decrease
average temperature
is
cooling.
This
in
leads
with
to
increased
a
rates
the
other
of
and
retort
and
the
hand,
the
time
process
the
heating
inside the can at the end of
higher
time tf,
On
of
magni-
the
process
heating
and
slight increase in cooling time.
114
o
-·
W
Dt:
U
c C,4
o coN.
- r-H- '.,o ,r4o
4.)Luo
o
0
C'4 0
zoc,
toU")
-,4
..
0
o0
O
>
H
,
-.4
4
4)0
+
0
3
a
4-
0
.4
4J
,,i m,-N r-
0
0%
r
N
o
LA
r-
LA
r-
o
o%
Lu"
L
V
L
N4
% co
r-
Ln
I
0
U
4
I
d
L
E4rC
0
,I
i
cO
uO
n)
m
w
44
t .I V
-,
r
t C
4
V
v
4l
+
4
4C
I
N
N
m
O ·
Ln
-4
-,
4
o
rl
0 -4
Zr %4
-4
.
.4
'
.
·
04-'40
L -IW
N4
· ,4
04
0,.)
Q
0-i-,-
i
-
')
· .r-H· ,
0.
-
N
* ' 0;*
*
-0
f-.
LA
e4
co
e4
.,
- n
,-
0 .4"4J
a act
HQ).
°,
46
H
0
.l
o
(N ,
(
00
LA
oo(
4i
r
.N
O~ ~
~
0@H-H
N
O
.~ I.
I
N
U
E-
r)'· U1,.-(N
0
z
E
N~
En
t l
3O4c
.r1
rl0
-
4l4i -4)
to 0
u
r
~
= ·
to
n
I
.
co
CO
%
a
0
Eco
. '0
-,
Nl
(V NN
.
0
4.
CO
H
O ,-.o
CO
O
.N
N
00
O
fo
m
'0
D
Lo
0
4)
4)
00
'
-,O
o co
C · 0r4
,
C
r4
0
-
*,-,
H
0
03
0
0
4)
0
*4
0
0
U
Ea
4 6
H
L
co
o
0)
PA
0
4
115
U
90<
c
E
80<
LJ
w
a.
2
70
Li
~-
w
(9
60
3
1
RATE
7
5
OF TEMPERATURE CHANGE
°C/min.
Fig. 6.7
Variation in Maximum
Heating and Cooling
Rates of
LU
116
It is interesting to note that the
inlet
hot-fill
perature for the cans is one of the major variables
the nutrient retention. Figure
6.8
that
shows
nutrient retention can increase by up to
hot-fill temperature is increased to
50
100
affecting
the
average
percent
degree
tem-
as
C.
the
Another
major advantage in using higher inlet temperature for foods is
that the sterilization time is reduced significantly, as shown
in figure 6.9. This observation
supports
strongly
the
idea
that the food contents should be as hot as possible just prior
to canning,
and
the
should
sterilization
be
carried
out
immediately after the canning operation.
The final optimal nutrient concentration varies in a very
narrow range from 43.3 percent to 43.6 percent as one enhances
the maximum rates of heating and cooling by a factor
of
four
(table 6.2). This is shown in figure 6.10 for simulations done
with two different time step
sizes.
Note
maximum is observed at Umax= 4 degree
flattens out as the time step is
that
C/min,
(=.089 min). From the nature of the
higher
apparent
which
however,
reduced by 1/5.
in table 6.2 correspond to the dimensionless
higher limits of u, a
an
time
bang-bang
nutrient
The
results
step
.001
control,
with
retention
should
be
expected since the Hamiltonian would be maximized by operating
at the highest values
of
illustrated for the one
the
This
fact
is
well
geometry
with
no
con-
control.
dimensional
straints on the retort temperature (figure
5.7).
The
reason
117
52
5(
0
0
z
Li
47-
-
z
45
42.!
70
80
INLET
90
TEMPERATURE
100
C
Fig. 6.8 Nutrient Retention at Dif f erent
Inet Hot -FillI Temperatures
118
13
12
10
L-
H
9(
7'
6"
BC
70
90
80
INLET
TEMPE RATURE
100
°C
Fig. 6.9 Process Time and Total
Sterilization Time at Different
Inlet Hot-Fill
Temperatures
119
44
0o
a
zw 43
frH
z
42
2
4
6
RATE OF TEMPERATURE CHANGE
Fig.610
Variation
I
°C/min
in Limits of the Control
U
120
for not observing this phenomenon in the present
case,
seems
to be associated with the numerical scheme for integration
time domain. With higher rates of heating and
are large changes in temperatures in a very
cooling,
short
which require very small time steps for accurate
This explains the flattening of the nutrient
in figure 6.10. We could expect a
trient retention,
if
reduced by 1/10 or
the
marginal
minimum
1/100.
A
step
finer
there
time-span,
integration.
retention
increase
size
curve
in
were
spatial
ter time and
discretization
prevented
However, the excessive amount of
storage
required
us from any further
for
such
reduction
nu-
further
would be another important way to improve the accuracy of
numerical algorithm.
in
the
compu-
integrations,
in the
step
has
size
in
the time or spatial domain.
Some important inferences can be drawn from
the
results
illustrated in this section. These follow next along with
the
discussion on other related aspects of the thesis.
6.3 DISCUSSION AND CONCLUSION
The mathematical developments in the
preceding
have shown that bang-bang control with single-point
represents the optimal solution to the problem
the nutrient retention. This is true for a
applications where the
system
dynamics
of
general
are
chapters
switching
maximizing
class
governed
by
of
a
121
diffusion
equation
with
the
control
operating
boundaries, and the cost function and all other
on
system
tions being independent of the control. The aim of the
was to apply the
techniques
of
optimal
control
maximize the nutrient retention during thermal
the
equa-
thesis
theory
to
processing
of
canned foods.
The results presented for one dimensional
slab
geometry
will be applicable for the sterilization of cylindrical
though numbers may vary. For example, it
is
easier
to
with a one dimensional model that all solutions with
switchings represent
only
suboptimal
cases,
cans,
show
multiple
and
that
the
bang-bang control with a single switching point is the optimal
solution.
This is true when there are no constraints
retort temperature, which is rarely found in
one can show that constant
rise and
fall
of
retort
temperature
respectively, is the optimal
solution
heating
when
the
practice.
temperature
during
on
Again
with
maximum
and
cooling
there
are
con-
straints on the retort temperature. This is one of the general
practices followed in food process industry.
Several researchers in the past have tried various
kinds
of functional forms and parametric optimization techniques for
maximizing nutrient retention. (See for example,
Teixeira
al. (1969 a,b), Thijssen et al. (1978) and Ohlsson (1980
among
others.)
Most
of
this
work
has
been
et
b,c)
based
trial-and-error optimization, there being no guarantee that
on
a
122
partieular type of functional form or the control policy
will
be the most optimal. Our approach, on the other hand, does not
make a priori assumptions regarding the functional form of the
retort temperature; it
derived from the
is
rather
maximum
the
principle
necessary
which
conditions
lead
us
to
the
optimal control.
Finally, we have modified the model for a two dimensional
cylindrical geometry and have applied it to the
sterilization
of pork puree, on which significant optimization has been done
in the past. Our results compare favourably with
values of nutrient
retention
(1975), consistent with the
policy derived by them is
reported
fact
a
by
that
bang-bang
the
Teixeira
the
optimal
control
with
highest
et
al.
control
single
switching.
The work of Saguy and Karel (1979) served as
point for this research.
They
have
shown
how
a
Pontryagin's
minimum principle can be applied to the problem of
nutrient retention. However, many of
their
less rigorous than those made
and
here,
starting
maximizing
assumptions
this
work
were
extends
their analysis in a logical manner.
One of the major contributions of our model lies
in
its
distributed nature, so that one can compute
temperatures
and
nutrient and micro organism
accurately.
concentrations
More
importantly, there are no errors resulting from the lumping of
these quantities. This has also helped us to rigorously define
123
the process time and the cooling time, and to account
tly for the sterilization during the
was not done in the work of others.
sterilization of pork puree,
we
cooling
correc-
process,
With the example
have
illustrated
which
of
the
that
our
optimal control policy will lead to maximum nutrient retention
under given conditions.
Last but not the least, it is interesting
inlet hot-fill
temperature
of the canned foods
to
note
is one
that
of
the
major variables, affecting the nutrient retention. Hence every
effort should be made to keep
this
temperature
as
high
as
possible prior to sterilization.
6.4 SUGGESTIONS FOR FUTURE WORK
The last point mentioned in the preceding
section
gives
us some clues to the direction of future research. There is
a
significant scope for further improving the nutrient retention
and at the same time, reducing the process time, by
the on-line processes prior to sterilization, to
modifying
ensure
high
inlet hot-fill temperatures. This research is likely to foster
more in an industrial environment.
In this thesis, we have concentrated on conduction heated
foods.
However, there are several kinds of
semi-solid
foods
as well, wherein the convective currents set up inside the can
will enhance
the
heat
transfer.
Normally,
the
industrial
124
sterilizers are designed to provide end-to-end, parallel
axis
so
that
or other type of rotation
and
of
agitation
convection can occur inside the can. While
much
work has been done in this area, no one has
sound theoretical model for
predicting
cans,
the
yet
experimental
developed
convective
a
heat
transfer coefficients.
A substantial portion of this thesis has been devoted
the
mathematical
development
of
the
distributed
principle. One can find a vast scope for theoretical
to
minimum
as
well
as applied research in this field. However, from our point
of
view, the techniques of optimal control are a means to an end,
and not an end in themselves.
APPENDIX
I
NOMENCLATURE
Definition
Symbol
coefficients in the quadrature formula
(i=1 to 6)
C
cost associated with the terminal state
CM
micro organism concentration, no./cm 3
CMo
initial concentration of micro organisms,
no./cm 3
CN
nutrient concentration, g/cm3
CNo
initial concentration of the nutrient, g/cm3
C1
final concentration of micro organisms
D
can diameter, cm
D
time required to reduce the reactant concentration by a factor of 10, min.
Dr Dref
value of D at a certain reference temperature,
min.
E
dimensionless activation energy
EM
activation energy for destruction of micro
organisms, kcal/mol
EN
activation energy for nutrient degradation,
kcal/mol
E
activation energy, kcal/mol
a
125
126
Definition
Symbol
H
Hamiltonian
I
integral term
J
cost function
K,K o
reaction rate constant, min - 1
L
characteristic length: slab thickness for one
dimensional geometry, can height for two dimensional geometry
L
Lagrange multiplier vector
N
concentration, mol or no./cm 3
P
costate variables vector
Pi
costate variable associated with the state
variable Xi
(i=l to 5)
(P1- P2) dy
Q
vector expressing initial conditions
R
gas constant, kcal/mol.K
R
vector expressing terminal conditions
T
temperature,
T iTin
T
T
max
min
TR
Tr,Tref
T2
°C or K
initial temperature of the can, °C or K
maximum temperature for the retort, °C
minimum temperature below which no further
nutrient degradation or micro organisms
destruction occurs. C
retort temperature,
C or K
reference temperature, K
temperature
differential
(T-TR),
0C
or K
127
Definition
Symbol
V
volume of the can
Vn
characteristic functions in the eigenfunction
expansion
X
state variables vector
X1
dimensionless retort temperature
X2
dimensionless
X3
dimensionless nutrient concentration
X4
dimensionless micro organisms concentration
X5
penalty for violating the constraint
Xlo
initial value of X 1
X2o
initial value of X 2
a
diameter to length ratio for the can
a1
reaction rate constant for nutrient degradation
a2
reaction rate constant for destruction of
micro organisms
b
term in the kinetic expression(2.2),
equivalent of activation energy
bl
lower constraint on the retort temperature
b2
upper constraint on the retort temperature
f
right-hand side of the system equations in
a vector form
f(x)
function
of x
equivalent
of T 2
128
Definition
Symbol
f(xi )
value of the function
g
time variable cost term
h
element width in spatial discretization
t
time
tI
time, min.
t
c
cooling time
tf
process time
ti
ith switching time
t
initial time
1
o
at x.
u
control variable
u
control variable vector
u'
control variable,
Uma x
ax
Umin' min
1
0 C/min.
maximum value of the control
minimum value of the control
spatial co-ordinate
Y
y
z
spatial co-ordinate vector
dimensional spatial co-ordinate, cm
increase in temperature necessary to reduce
the D value by a factor of 10
z
spatial co-ordinate along the vertical axis
of the can
129
Definition
Symbol
C<
thermal conductivity, cm 2/min.
t
ratio of the activation energies EM/EN
e
unit outward normal vector
v>
value
(O
integrand of the cost function
X
An
of P 4 at t=tf
heaviside step function
eigenvalue in the solution by eigenfunction
expansion
REFERENCES
Ammerman, G.R. 1957. The effect of equal lethal heat treatments at various times and temperatures upon selected food
components. PhD thesis. Purdue Univ., W. Lafayette, Indiana.
Athans, M. and Falb, P.L. 1966. "Optimal Control: An Introduction to the 'meory anda its Applications", McGraw Hill Book
Co.,New York.
Athans, M. and Canon, M.D. 1964. Fuel optimal singular control
of a non linear second order system. Preprints 1964 Joint
Autom. Control Conf. pp 245-255.
Ball, C.O. 1923. Thermal process time for canned
Nat. Res. Council 7, part I, # 37.
food.
Ball, C.O. and Olson, F.C.W. 1957. "Sterilization
Technology", McGraw Hill, Inc. New York.
Bellman,
R., Glicksberg,
I.,
and
Gross,
0.
1956.
Bull.
in
Food
On
the
bang-bang control problem. Quart. Appl. Math. 14:11.
Berkowitz, L.D. 1961. Variational methods in problems
control and programming. J. Math. Anal. & Appl. 3:145.
of
See also,
1962. On control problems with
variables. J. Math. Anal. and Appl. 5:488.
bounded
state
Bigelow, W.P., Bohart, G.S., Richardson, A.C., and Ball,
1920. Heat penetration in processing canned foods.
Canners Association Bull. 16L.
Brown, R.A. 1979. Finite element methods for the
of capillary surfaces. J. Comp. Phys. 33:217.
C.O.
Nat.
calculation
Bryson, A.E. Jr. and Ho Y. 1975. "Applied Optimal Control:
Optimization, Estimation and Control", Revised
Printing,
Hemisphere Publishing Co. Washington D.C.
Butkovskii, A.G. and Lerner, A.Y. 1960. The optimal control of
systems with distributed parameters. Autom.
and
Remote
Control, 21:13
See also,
Butkovskii, A.G. 1962. The maximum principle
systems with distributed parameters. Autom.
Control, 22:1156.
and
130
for
and
optimum
Remote
131
1979. Distributed parameter control systems. Avomatica i
Telemekhanika, 10:16.
Castillo,
P.F., Barreiro,
J.A., and Salas, G.R. 1980.
Predic-
tion of nutrient retention in thermally processed heat conduction food packaged in retortable pouches. J. Food Sci.
45:1513.
Chang, H. and Reilly P.J. 1976. Optimal catalyst profiles for
a two step reaction sequence in a packed bed. Chem. Eng. Sci.
31:413.
Charm, S.E. 1978. "Fundamentals of
edition.
Food
Engineering",
pp 189-231. AVI Pub. Co., Westport,
third
Conn.
Chen, S. and Jeng, W.F. 1978. Minimum end time policies for a
Sci.
batchwise radical chain polymerization. Chem. Eng.
33:735.
Denn, M.M.,
Gray, R.D.,
and Ferron,
J.R. 1966. Optimization
a class of distributed parameter systems. Ind.
Fundamentals, 5:59.
&
Eng.
in
Chem.
see also,
Denn, M.M. 1969. "Optimization by Variational Methods", McGraw
Hill Book Co., New York.
Desoer, C.A. 1959. The bang-bang servo problem treated
variational techniques. Information & Control, 2:333.
by
Downes, T. and Hayakawa, K.I. 1977. A procedure for estimating
the retention of components of thermally conductive processed
foods. Lebensm-Wiss.u-Technol. 10:256.
Fairbrother, R.G. 1982. American Can Co., Barrington Technical
Center, Illinois. Personal Communication.
Farhadpour,
F.A.
and
Gibilaro
L.G.
1981.
On
the
optimal
unsteady state operation of a continous stirred tank reactor.
Chem. Eng. Sci. 36:143.
See also,
1975. Continous unsteady state operation of a
stirred tank reactor. Chem. Eng. Sci. 30:997.
in
Analysis
Finlayson, B.A. 1980. "Nonlinear
Engineering', pp 28-32, McGraw Hill, Inc. New York.
Gould, L. 1969. "Chemical
Pub. Co., Reading, Mass.
Gruyaert,
F. and Crowe, C.M.
Process
1974.
Control".
On
the
Chemical
Addison-Wesley
optimization
of
132
distributed parameter systems with boundary control: A counter
example for the maximum principle. AIChE J. 20:1124.
Hahn, D.R., Fan, L.T., and Hwang, C.L. 1971. Optimal start-up
control of a jacketed tubular reactor. AIChE J. 17:1394.
Harris, R.S. and Karmas, E. 1975. "Nutritional Evaluation
Food Processing", AVI Pub. Co., Westport, Conn.
Hayakawa, K.I. and Ball, O.C.
temperatures
1971. Theoretical
formulas
of
for
various
in cans of solid food and for evaluating
heat processes. J. Food Sci. 36:306.
Hayakawa, K.I. 1978. A critical review of mathematical procedures for determining proper heat sterilization processes.
Food Technol. 32(3):59.
Hill, C.G.Jr. and Grieger-Block R.A. 1980. Kinetic data:
Generation, interpretation and use. Food Technol. 34(2):56.
Houstis, E.N., Lynch, R.E., Rice, J.R., and Papatheodorou T.S.
1978. Evaluation of numerical methods for elliptic partial
differential equations. J. Comp. Phys. 27:323.
Jen, Y., Manson, J.E., Stumbo, C.R., and Zahradnik, J.W. 1971.
A procedure for estimating sterilization of and quality factor
degradation in thermally processed foods. J. Food Sci. 36:692.
Johnson, C.D. 1965. Singular solutions for problems in optimal
and
control. From "Advances in Control Systems: Theory
Applications", edited by C.T. Leondes, vol. II, Academic
Press, Inc. New York.
Jones, A.G. 1974. Optimal operation
crystallizer. Chem. Eng. Sci. 29:1075.
of
a
cooling
batch
Joslyn, M.A. and Heid, L. 1963. "Food Processing
Vol.II" , AVI Pub. Co., Westport, Conn.
for
Methods
"Numerical
1972.
Keller, H.B.
New
York.
Boundary-Value Problems", Blaisdell,
Operations,
Two-Point
1975.
"Food
Process
Leniger, H.A. and Beverloo, W.A.
Engineering", D. Reidel Pub. Co., Dordrecht, Holland / Boston,
Mass.
Lenz, M.K. and Lund,
D.B. 1977 a. The Lethality-Fourier
number
method: Experimental varification of a model for calculating
average quality factor retention in conduction heating canned
foods. J. Food Sci. 42:997.
133
, 1977 b. The Lethality-Fourier number method:
Experimental verification of a model for calculating temperature profiles and lethality in conduction heating canned
foods. J. Food Sci. 42:990.
See also,
, 1980. Experimental procedures for determining
destruction kinetics of food components.
Food
Technol.
34(2):51.
Loncin, M. and Merson, R.L. 1979. "Food Engineering: Principles and Selected Applications", pp 329-365.
Academic Press,
Inc. New York.
Lopez, A. 1975. "A Complete Course in Canning", tenth edition.
pp 114. The Canning Trade, Inc. Baltimore, Maryland.
Lund, D.B., Bruin, S.Jr., and Lazar, M.E. 1972.
Internal
temperature distribution during individual quick blanching.
Food Technol. 37:167.
Lund, D.B. 1975. Effects of heat processing on nutrients. From
"Nutritional Evaluation of Food Processing", pp 205-239.
Edited by R.S. Harris and E. Karmas. AVI Pub. Co., Westport,
Conn.
, 1977. Design of thermal processes
nutrient retention. Food Technol. 31(2):71.
for
maximizing
and also,
, 1982. Influence of processing on nutrients in foods.
J. Food Protection. 45:367.
Mulley, E.A., Stumbo, C.R., and Hunting, W.M. 1975 a. Kinetics
of thiamine degradation by heat. A new method for studying
reaction rates in model systems and food products at high
temperatures. J. Food Sci. 40:985.
Kinetics of thiamine degradation by heat. Effects
form of the vitamin
on its rate of destruction.
J.
1975
of pH
Food
b.
and
Sci.
40:989.
Thiamine: A chemical index of the sterilization
thermal processing. J. Food Sci. 40:993.
1975
c.
efficacy
of
Murase, A., Roberts, H.L., and Converse, A.O. 1970. Optimal
thermal design of an autothermal ammonia synthesis reactor.
Ind. Eng. Chem. Process Des. Develop. 9:503.
134
Myers, G.E. 1971. "Analytical Methods in Conduction
Transfer, pp 74-142, McGraw Hill Book Co. New York.
Nishida,
N., Liu, Y.A.,
Lapidus L., and Hiratsuka
Heat
S. 1976.
An
singular
e:ffective computational algorithm for suboptimal
and/or bang-bang control. AIChE J. 22:505.
Ogunye, A.F. and Ray, W.H. 1971. Optimal control policies
tubular reactors experiencing catalytic decay. AIChE
for
J.
17(1):43.
Ohlsson, T. 1980 a. Temperature dependence of sensory quality
changes during thermal processing. J. Food Sci. 45:836.
, 1980 b. Optimal sterilization
flat containers. J. Food Sci. 45:848.
temperatures
for
, 1980 c. Optimal sterilization temperatures for
sensory quality in cylindrical containers. J. Food Sci.
45:1517.
Patwardhan, V.S. and Sadana, A. 1982. The optimum
policy for a deactivating immobilized enzyme
reactor. Chem. Eng. Comm. 15:169.
Pontryagin,
L.S.,
Boltyanskii,
V.,
Gamkrelidze,
temperature
fixed
bed
R.,
192.
"The Mathematical Theory of
Mishchenko,E.
Processes", Interscience Publishers, Inc. New York.
Ray, W.H. and Szekely, J. 1973. "Process
258-259, Wiley Interscience, New York.
Optimization",
Ray, W.H. 1981. "Advanced Process Control", pp 84-118,
Hill Book Co., New York.
Robinson, E.R. 1970. The optimal control of an
batch distillation column. Chem. Eng. Sci. 25:921.
Sage, A.P. 1968. "Optimum Systems
Inc., Englewood Cliffs, N.J.
and
Optimal
Control",
pp
McGraw
industrial
Prentice
Hall,
Saguy, I. and Karel, M. 1979. Optimal retort temperature
profile in optimizing thiamine retention in conduction type
heating of canned foods. J. Food Sci. 44:1485.
Smith, T. and Tung, M.A. 1982. Comparison of formula methods
for calculating thermal process lethality. J. Food Sci.
47:626.
Stumbo, C.R.193
New
procedures
for
evaluating
thermal
135
processes for foods in cylindrical containers.
7:309.
Food
, 1973. "Thermobacteriology in Food
second edition. Academic Press, Inc. New York.
Technol.
Processing",
Optimal temperature
Szepe, S. and Levenspiel, O. 1968.
deactivation,
policies for reactors subject to catalyst
I-batch reactor. Chem. Eng. Sci. 23:881.
Teixeira, A.A., Dixon, J.R., Zahradnik, J.W., and Zinsmeister,
G.E. 1969 b. Computer optimization of nutrient retention in
the thermal processing of conduction heating foods. Food
Technol. 23:845.
1969
a.
Computer determination of spore survival distributions in
thermally processed conduction heating foods. Food Technol.
23:352.
Teixeira, A.A., Zinsmeister, G.E., and Zahradnik, J.W. 1975.
Computer simulation of variable retort control and container
geometry as a possible means of improving thiamine retention
in thermally processed foods. J. Food Sci. 40:656.
Tenney, R.R. 1982. Department of Electrical
Cambridge, Mass. Personal Communication.
Eng.,
MIT,
Thijssen, H.A.C., Kerkhof, P.J.A.M., and Liefkens, A.A.A.
1978. Short-cut method for the calculation of sterilization
conditions yielding optimal quality retention for conduction
type heating of packed foods. J. Food Sci. 43:1096.
Thijssen, H.A.C. and Kochen, L. 1980. Calculation of optimum
sterilization conditions for packed conduction type foods. J.
Food Sci. 45:1267.
Thompson, D.R. 1982. The challange in predicting nutrient
changes during food proceesing. Food Technol. 36(2):97.
Timbers, G.E. 1971. Some aspects of quality degradation during
the processing and storage of canned foods. Ph.D. thesis,
Rutgers, The State Univ., New Brunswick, N.J.
Walsh, J. 1971. Finite difference and finite element
of approximation. Proceedings of Royal Society of
Series A.323:155.
Yamane, T., Kume, T., Sada, E., and Takamatsu,
simple optimization technique for fed-batch
methods
London.
T. 1977.
culture.
A
J.
136
Ferment. Technol.
55(6):587.