Investigation of Electric Arcs in 42 Volt
Automotive Systems
by
Alan Nuo-Bei Wu
Submitted to the Department of Electrical Engineering and Computer Science
in Partial Fulfillment of the Requirements for the Degrees of
Bachelor of Science in Electrical Science and Engineering
and Master of Engineering in Electrical Engineering
and Computer Science
at the Massachusetts Institute of Technology
BARKER
MASSACHUSETTS INSTITUE
OF TECHNOLOGY
May 30, 2001
Copyright ( 2001 Alan Nuo-Bei Wu. All rights reserved.
JUL
The author hereby grants to M.I.T. permission to reproduce and
distribute publicly paper and electronic copies of this thesis
and t grant others the right to do so.
Author
L15partment o Electrical Engineering and Computer Science
0May 30, 2001
Certified by
Markus Zahn
Professor
Department of Electrical Engineering and Computer Science
Massachusetts Institute of Technology
Thesis Supervisor
Certified by
200
LB
LIBRARIES
-
Thomas A. Keim
Principal Research Engineer
Department of Electrical Engineering and Computer Science
Massachusetts Institute of Technology
Tjaesi5 upervisor
Accepted by
Arthur C. Smith
Chairman, Department Committee on Graduate Theses
Investigation of Electric Arcs in 42 Volt
Automotive Systems
by
Alan Nuo-Bei Wu
Submitted to the
Department of Electrical Engineering and Computer Science
May 30, 2001
In Partial Fulfillment of the Requirements for the Degree of
Bachelor of Science in Electrical Science and Engineering
and Master of Engineering in Electrical Engineering and Computer Science
Abstract
The continuing trend of increasing power demand by automobiles indicates that a move
from the present 14-Volt electrical system to the developing 42-Volt electrical system will
take place in the near future. Electric arcs have proven to be an important consideration in
electrical system faults and in current-interrupting devices such as fuses, switches, relays,
etc. In this thesis possible cases of intermittent recurring arcs in fuse-protected systems
are investigated. Parameters such as pre-arcing short-circuit current magnitudes, durations, and recurrence frequencies are selected to find worst-case possibilities. A mechanical chopper apparatus is used to create periodic arcs under testing conditions identified as
being possible in automotive systems.
For the cases investigated, we found that damage at the site of a recurring intermittent
short circuit, cleared by an arc, is substantially more severe at 36 volts, the nominal battery
voltage in a 42-Volt system, than at 12 volts. Arc energy can be ten to hundreds of times
greater at the higher voltage. This is explained in terms of a difference in two types of
possible arcs. A 12-Volt arc is inherently unstable; it extinguishes rapidly. A 36-Volt arc
is inherently stable, for small electrode separations. As a result, the arc bums for a substantial period after each interruption while the contacts develop adequate separation for
the arc to become unstable.
We also observed that at the higher voltage it was harder to produce a stable sequence of
faults without blowing a fuse. This was due to welding between the electrodes, which
caused the electrodes not to pull apart as intended. The resulting longer duration of the
short circuit would blow the fuse. We are unable to provide evidence that this difference
leads to a substantial reduction of the possibility of such a repetitive, cleared fault occurring in a vehicle, although the possibility is worthy of attention in future research.
Investigation of Electric Arcs in 42 volt Automotive Systems
2
Thesis Supervisor: Markus Zahn
Title: Professor, Department of Electrical Engineering and Computer Science
Thesis Supervisor: Thomas A. Keim
Title: Principal Research Engineer, Department of Electrical Engineering and Computer
Science
Massachusetts Institute of Technology
Investigation of Electric Arcs in 42 Volt Automotive Systems
3
Acknowledgment
There are many people whom I would like to thank for their support, encouragement, and
advice throughout the process of researching and writing this thesis. I wish to thank my
thesis advisors, Professor Markus Zahn and Dr. Thomas Keim, for their patience, insight,
and support over the past year. Without their help and guidance, this thesis would not have
been possible. Their genuine concern for me, as well as for my research, has been invaluable.
I would like to thank the MIT/ Industry Consortium of Advanced Automotive Electrical/
Electronic Components and Systems for the opportunity to work on this project. Furthermore, I would like to thank Yazaki Corporation for initiating this project and for their contributions to this thesis research. Also, I greatly appreciate the generous fuse samples
donated by Littelfuse and Pudenz.
I also wish to thank James Geraci for his help in programming LabView and his guidance
at the start of this project. Not only did I appreciate his clear explanations and patience,
but also the numerous insights he shared.
I am deeply grateful to Stephanie Ng for her continuous support and tireless smile. She is
always there to uplift my spirits.
I would also like to thank my parents and my brother, Victor, for their encouragement and
support. I thank them for believing in me and always being there to lend a hand whenever
I needed one. I cannot express my gratitude enough.
Acknowledgment
4
Table of Contents
Chapter 1: Introduction .............................................................................................
11
1.1 Motivation for a 42V Electrical System .....................................................
12
1.2 Previous Work ............................................................................................
14
1.3 Thesis A pproach ........................................................................................
15
1.4 Organization of Thesis ...............................................................................
17
Chapter 2: Theory of Electric Arcs ..........................................................................
18
2.1 A rc Form ation ............................................................................................
18
2.1.1 Stable Arc Regions .....................................................................
19
2.1.2 Electrical and Thermal Properties of Stable Arc Regions............
20
2.2 The Cathode Phenomenon ..........................................................................
22
2.3 The Minimum Arc Current, I. ---------------------------------------............. 23
2.4 The Minimum Arc Voltage, Vm .---------------------...............................................
23
2.5 Voltage-Current Characteristics of Stable Arcs...........................................24
Chapter 3: Theory of Fuse Operation and the Determination of Test Matrix
Parameters .............................................................................................
3.1 Fuse O peration ..........................................................................................
28
29
3.1.1 Voltage Rating ............................................................................
29
3.1.2 Current Rating ............................................................................
31
3.2 RM S C urrent .............................................................................................
35
3.2.1 RMS Current of Unstable Arc ...................................................
38
3.2.2 RMS Current of Stable Arc ........................................................
39
3.3 Determination of Test Matrix Parameters .................................................
42
Table of Contents
3.3.1 12V Test Matrix ..........................................................................
43
3.3.2 36V Test Matrix ..........................................................................
47
5
Chapter 4: Experimental Setup ...............................................................................
53
4 .1 System O verview ...........................................................................................
53
4.2 The Shunt and Sensitivity to Noise ............................................................
56
4.2.1 Power Sources ............................................................................
58
4.2.2 Optical Isolation ..........................................................................
58
4.2.3 Notes of Physical Connections ...................................................
58
4.3 Motor Control ............................................................................................
58
4 .4 M O SFE T ...................................................................................................
63
4.5 Contact Detection and Timing ...................................................................
65
4 .6 Test Wires ..................................................................................................
Chapter 5: Test Results and Discussion ...................................................................
5.1 Effects of Electrode Melting as a Result of Sustained Arcing ....................
. 67
69
69
5.1.1 Alteration of wire and blade shape ............................................
70
5.1.2 Welding Effects ..........................................................................
72
5.2 Test Matrix Results ...................................................................................
73
5.3 Observations and Analysis: Unstable vs. Stable Arcs ...............................
79
5.4 Qualitative Measurements and Analysis: Arc Energy ................................
81
5.4.1 Arc Energy of Stable Arc ............................................................
82
5.4.2 Arc Energy of Unstable Arc ........................................................
83
5.4.3 Arc Energy Comparison ...............................................................
84
5.5 Welding and Its Implications ......................................................................
5.5.1 Effect of Peak Current Magnitude and Duration ........................
86
5.5.2 Effect of Wire Gauge ...................................................................
86
5.5.3 Effect of Separation Speed ..........................................................
88
Chapter 6: Thesis Conclusions and Suggestions for Future Research ...................
Table of Contents
85
89
6
6.1 Conclusion ......................................................................................................
89
6.2 Suggestions for Future Research ...............................................................
90
Appendix ..........................................................................................................................
92
A1.1 Blade speed near contact ........................................................................
92
A2.1 List of sym bols ........................................................................................
95
A3.1 LabView Code.........................................................................................
96
Bibliography ....................................................................................................................
97
Table of Contents
List of Figures
FIGURE 1. Regions of the stable arc: the anode fall, the cathode fall, and the arc
colum n ...................................................................................................
. . 20
FIGURE 2. Empirically determined voltage-current characteristics of arcs at various gap
25
lengths with copper electrodes.................................................................
FIGURE 3. Equivalent circuit of arcing tests ..............................................................
26
FIGURE 4. Arc characteristic curve with current load line of FIGURE 3 ..................
27
FIGURE 5. Empirical data for arc duration comparison between 32V fuses and 58V
fuses for a range of voltages ...................................................................
30
FIGURE 6. 32V ATC blade family fuse curves at 25'C ...............................................
32
FIGURE 7. 32V Miniblade family fuse curves at 25'C ..............................................
33
FIGURE 8. 15A ATC blade fuse curve at 25*C with Isustain = 21A ................................
35
FIGURE 9. Measured current waveform of an unstable arc ........................................
37
FIGURE 10. Ideal square current pulse as an approximation to measured waveform in
37
FIGU RE 9 ............................................................................................
FIGURE 11. Measured train of current pulses ............................................................
38
FIGURE 12. Measured current waveform of stable arc ..............................................
39
FIGURE 13. Idealized model of stable arc waveform where 0<k<1 ...........................
40
FIGURE 14. Arc current as a function of time for t' = t - D ........................................
41
FIGURE 15. 12V Test matrix with ATC blade fuses ...................................................
45
FIGURE 16. 12V Test matrix with Miniblade fuses ...................................................
46
FIGURE 17. Graph of measured Arc Time vs. Circuit Resistance for T=700ms........ 48
FIGURE 18. Graph of measured Arc Time vs. Circuit Resistance for T=900ms........ 48
FIGURE 19. 36V Test matrix with TAC blade fuses ...................................................
51
FIGURE 20. 36V Test matrix with Miniblade fuses ...................................................
52
FIGURE 21. Experimental test system diagram ..........................................................
54
FIGURE 22. Experimental test system circuit ............................................................
54
FIGURE 23. Shunt resistance used in experimental tests.............................................57
List of Figures
8
FIGURE 24. Motor controlled blade and wire ............................................................
59
FIGURE 25. The mechanical chopper apparatus used in this research .......................
60
FIGURE 26. An enlarged picture of the blade, springs, push rod and guide bearing........60
FIGURE 27. DC Motor used to run mechanical chopper in FIGURE 25....................61
FIGURE 28. Chopper motor control ............................................................................
62
FIGURE 29. PWM circuit to control chopper motor speed ....................
62
FIGURE 30. The MOSFET used in this research ........................................................
63
FIGURE 31. PowerFET control of current flow ..........................................................
64
FIGURE 32. PowerFET driver circuit ..........................................................................
65
FIGURE 33. Contact detection signal path ................................................................
66
FIGURE 34. Contact detection circuit ........................................................................
66
FIGURE 35. Connection of the battery, the fuse and the wire resistance ....................
68
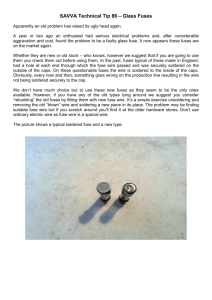
FIGURE 36. Normal and deformed copper wire and steel blade .................................
68
FIGURE 37. 14AWG test wires (from left): before testing, 12V testing, 36V testing......71
FIGURE 38. Steel blades (from left): before testing, 12V testing, 36V testing...........71
FIGURE 39. Equivalent circuit of arcing tests ............................................................
82
FIGURE 40. Arc current as a function of time for a stable arc ...................................
82
FIGURE 41. Arc energy vs. peak current for 36V and 12V tests..................................
84
FIGURE 42. Arc energy ratio vs. peak current for a series of wire gauges...................85
FIGURE 43. Fuse clearing rate vs. wire gauge for 36V TAC tests ..............................
87
FIGURE 44. Fuse clearing rate vs. wire gauge for 36V Miniblade tests ....................
87
FIGURE A1.1. Horizontal velocity component, V, ..................................................
89
9
Figures
of Figures
List of
9
List of Tables
TABLE 1. Minimum arc currents for various materials in air .....................................
23
TABLE 2. Minimum arc voltages for various materials in air ......................................
24
TABLE 3. Wire gauge and fuse pairings used in this research .....................................
67
TABLE 4. Copper wire resistance values at 25'C .......................................................
67
TABLE 5. 36V tests at 25'C with TAC fuses at T=900ms ..........................................
75
TABLE 6. 36V tests at 25'C with Miniblade fuses at T=700ms .................................
76
TABLE 7. 12V tests at 25'C with ATC fuses ..............................................................
77
TABLE 8. 12V tests at 25'C with Miniblade fuses .....................................................
78
TABLE 9. Qualitative description of frequency and extent of events observed for 12V
. . 80
and 36V tests...........................................................................................
TABLE A2.1. List of symbols and their descriptions .................................................
List of Tables
95
10
Chapter 1
Introduction
In recent years, it has become apparent that a higher voltage electrical system in the automobile will be essential in keeping up with ever increasing power demand of the passenger vehicle. In 1994, a search began for an economically feasible approach to handle
increasing electrical loads of future vehicles with Mercedes Benz in collaboration with
MIT. The team they assembled put forth a proposal to implement a 42 volt automotive
electrical system, a three-fold increase from the present day 14 volt system, to meet the
power and efficiency demands of future automotive electrical loads. This initial effort has
lead to the formation of the MIT/Industry Consortium on Advanced Automotive Electrical/Electronic Components and Systems which, comprised of MIT researchers and over
fifty company members from the automotive industry, has come to define standards for the
near future 42V system [1].
The tremendous task of replacing the existing 14V system begins with research for the
proposed 42V system in both economical and technological aspects. The work done by
the Consortium to lead this effort is divided into eleven research units, which are comprised of MIT faculty, staff and students along with representatives from member companies who serve on the subcommittee of each research unit. The work described in this
thesis was conducted under Research Unit #7b, the Investigation of Electric Arcs in 42V
Systems. The research presented in this thesis seeks to provide insight into the effects of
arcing in 42V systems through the experimental simulation of electrical arcs in circumstances realistically similar to automotive conditions.
Chapter 1
11
1.1 Motivation for a 42V electrical system
With the rapid growth of electric loading in the average automobile in recent years, the
total electric load has more than doubled in the last twenty years and will continue to
increase beyond limits of acceptable costs and efficiency operating under the 14V system
[2]. The additional electric loads come from the desire to provide additional comfort (e.g.,
stereo systems, seat warmers) and safety (e.g., anti-lock braking systems), electrification
of former mechanically driven components (e.g., engine cooling fan, throttle, windows),
and fuel saving operation modes (e.g., intermittent motor operation). Also, paralleling the
total load growth in the automobile has been the growth in the number of high power
loads, which demand larger amounts of current per load from the 14V bus. These loads
necessitate larger wire sizes within the electrical distribution system, adding extra weight
and cost to the vehicle [3, 4]. More importantly the new loads will increasingly incorporate solid-state power switching. Power switching large currents requires large expensive
semiconductors.
A three-fold increase of the electrical bus voltage from 14V to 42V leads to one-third of
the current for a given amount of power delivered in the 14V system. In turn, the decrease
in current alleviates the issues brought on by the increasing power demand. For one, the
size of the wiring harness for a given power level will be reduced since the amount of current delivered to the loads is reduced. Also, the size and cost of solid-state switches is
reduced for any load, making the new load less expensive. More room is thus allocated for
the automotive electrical system to supply future high power loads that cannot be supplied
by the present system.
12
Chapter
Chapter 1I
12
Although the new voltage system responds well to increasing power demand, it also introduces new safety issues related to arcing in high voltage systems. In fact, similar arcing
and electrical insulation issues have been a problem in airplanes, but it has only recently
caught the attention of the automotive industry because it has not been an issue for the
14V system [5]. Because a sudden interruption of current in a 14V system results in an
unstable arc, the event is short and a relatively small amount of energy is delivered to the
14V arc. However, if the voltage source is high enough, as in the case of the 42V system,
then it is possible for an arc to sustain a discharge, and be characterized as stable, which is
often observed in welder's arcs [6]. Profound implications result from stable arcs as
extremely high temperature can result and relatively high energy is delivered to the stable
arc that can result in burning wire insulation and fire. These high energy arcs can also
cause loose droppings of molten metal and ignite fuel vapors.
Since the battery boost from 6V to 12V in the late 1950s [2], the automotive industry has
apparently unknowingly taken advantage of the fact that the then new 14V system was just
below 15 volts, the minimum voltage mark for the possible formation of stable arcs in typical metals. Although the minimum stable arc voltage depends on the material at the ends
of the arc (see Table 1 in Chapter 2), there is no known material with a minimum stable arc
voltage above 20 volts [6]. Therefore, if an arc is to occur in a 42V system, it is possible
that it will be a stable arc, whereas an arc in the 14V system with usual automotive metal
material such as steel is never stable. As a result, the automotive industry must now face
the issue of sustained stable arcing in the 42V system.
Arcing may occur in many places in the vehicle. In fact, there is a potential for a sudden
interruption of current just about anywhere current flows such as in relays, switches, fuses,
Chapter I
13
and connectors. However, the most dangerous arcs to the surrounding environment are
uncontained, repetitive, and carry high initial current. An uncontained arc has the possibility of igniting fuel vapors, while being repetitive allows greater probability for hazard,
and a high initial current leads to longer arc length, duration, and higher energy delivered
to the arc. Although this description seems to fit a worst case scenario, it could result from
the intermittent shorting of the battery, each time followed by arcing. Specifically, broken
electrical insulation can expose metal wire that could come into periodic contact with the
chassis of the car, which is connected to the ground of the battery, to form intermittent
arcs.
The rupturing of wire insulation in the automobile is not uncommon, as it can result from
many causes. Wire insulation can be damaged if it is cut, bent, chafed, exposed to moisture, or from aging. During maintenance, wire insulation can be accidently cut by parts or
tools with sharp edges. Over time, cracks can result if a wire is severely bent; insulation
can be worn down to bare metal conductor by rubbing against a metal surface; and solvent
fluids introduced during repair can dissolve insulation.
1.2 Previous Work
Intermittent arcs resulting from the periodic shorting of a battery was first investigated by
a research group at Yazaki Inc., a member of the MIT/Industry Consortium, in an effort to
perform a worst-condition wire harness durability test. Using a mechanical chopper apparatus to cause intermittent arcs, a comparison was made between the repetitive shorting of
a 12V battery source and that of a 36V battery source. The results were dramatically dif-
Chapter
1
14
ferent in that the 36V results displayed a higher risk of hazard at the higher voltage leading
to fire from burning insulation.
The objective of this thesis is to better understand possible electric discharge hazards in
42V systems by testing recurring, intermittent arcs under conditions that are representative
of what would be found in an average automobile. In doing so, a similar setup as that of
the Yazaki experiment was used with several modifications designed to model more realistic scenarios in an automobile. This thesis research extends the preliminary Yazaki work
by:
1. Including a fuse in the system.
2. Selecting wires to simulate a wide range of representative operating conditions.
3. Controlling short-circuit current magnitude, duration and contact frequency.
1.3 Thesis Approach
In contemplating an electric system that is capable of providing unexpected and undesired
high currents, it is reasonable to assume a fuse is usually in place to protect the system
from overload. With a basic understanding of fuse operation, it is possible to create periodic short circuit events without clearing the fuse. The key is to keep both the short circuit
duration and contact frequency low enough. Therefore, intermittent arcs are theoretically
possible and could reflect results similar to the Yazaki experiments even with the addition
of a fuse in the system. As a guideline to perform a series of tests with a range of peak
current magnitudes and durations as well as contact frequencies, a matrix of test parame-
Chapter 1
15
ters is derived for 12V and 36V battery sources so that recurring, intermittent ground
faults, with subsequent arcs and possible fires, may occur without clearing the fuse.
Because certain conditions must be met in order not to clear the fuse, it is essential that
control of the peak current magnitude, duration, and contact frequency, be added to the
original setup used in the Yazaki experiment.
It is the purpose of this thesis to experimentally evaluate the worst repetitive arcs which
might be experienced in practical automobiles. To do this, an apparatus to create interrupted short circuits was built. Operating points were selected to be representative of the
worst conditions which could occur in an automobile. Generally, we tested close to the
highest fault current for a given contact duration which could exist in an automobile and
not blow a fuse. To limit the fault current, a length of wire is inserted into the circuit. The
gauge of wire is selected to be consistent with the fuse being used. The wire is representative of the resistance which may exist in an automobile wire harness between the battery
and the site of a short circuit.
Test measurements involve a systematic verification of theory as well as qualitative observations of physical effects such as the detection of molten copper, burning insulation, or
welding of the contacts. The experimental tests are run and controlled by the control program LabView and data is retrieved to the computer where analysis is made.
16
Chapter
Chapter I1
16
1.4 Organization of Thesis
A discussion of classic theory on electric arcs and their impact on the 42V system follows
in Chapter 2. A basic overview of fundamental fuse properties applicable to this thesis
project and the method used for arriving at the test matrix will be given in Chapter 3.
Chapter 4 follows with a detailed description of the experimental test setup with analysis
and discussion of the test results in Chapter 5. The conclusion and suggestions for future
work are in Chapter 6.
17
Chapter I1
17
Chapter 2
Theory of Electric Arcs
In this chapter, a treatment of the physics of the drawn arc and its impact on the 42V system is presented. Because of the complex nature of electric arcs, a qualitative approach is
taken to describe the formation, and possible subsequent sustainability of static arcs of
constant length. This work investigates arcs between electrodes that are being drawn
apart, not electrodes of fixed spacing. However, it has been shown that electrode separation velocities of less than 20 cm/s exhibits effects similar to that of a static arc [6]. The
dynamics of a static arc shall be applied to that of arcs created in these thesis experiments
since the maximum speed of separation during arcing is below the 20 cm/s mark for most
cases as is shown in the Appendix section A1.1. Following the discussion on arc physics,
some practical characterizations of the arc are presented. The focus of this chapter will
involve arcs for 14V and 42V systems.
2.1 Arc Formation
Arcs can be established in several ways. However, in an environment such as an automobile, arcs most likely result from the separation of two touching electrodes that are carrying current. As the electrodes begin to part, the contact area diminishes and the contact
resistance increases. As a result, the 12R heat is concentrated in a very small volume of
metal. Consequently, the metal may melt and cause the formation of a liquid metal bridge
between the electrodes. As the electrodes part further, the metal bridge reaches a very
Chapter 2
18
high temperature and the bridge ruptures explosively, either by evaporation or because of
the failure of surface tension forces to maintain a stable liquid bridge [7, 8]. After rupture,
an arc discharge, either transitory or sustained, takes place between the electrodes. If the
voltage is greater than the minimum voltage (Vm) required for a stable arc and the current
in the arc is greater than the minimum current (Im) for a stable arc, then the arc will sustain, and be termed stable. It should be noted that Vm is independent of Im and both values
depend on the electrode material [6, 8].
2.1.1 Stable Arc Regions
An arc begins when the distance between the electrodes is on the order of 1Om. It has
been estimated that the arc develops in about iOns from the explosion of the molten
bridge. At this initial stage, the arc is known as a "short" arc. As the electrodes separate
further, the arc will either extinguish, or sustain to become a "long" or stable arc. At the
point where the arc becomes stable, the electrons no longer fall almost freely from one
electrode to the other, but make many collisions, and three regions of the arc emerge (Figure 1): the anode layer, the cathode layer and the plasma, also known as the conducting
column [7, 9]. The anode layer is where the current must be transferred across the anodeto-gas junction; the cathode layer for the gas-to-cathode junction; and the plasma column
conducts the current through a body of gas. In forming the plasma column, the normally
neutral gas must be rendered conducting by the introduction of charged carriers. Finally,
as the gap distance increases, the voltage required to sustain the arc also increases. The
arc will extinguish when the voltage is no longer able to sustain the arc [3, 7].
19
Chapter 22
19
Anode fall
t
Cathode
CL
fat
Distance from anode-+
FIGURE 1. Regions of the stable arc: the anode fall, the cathode fall, and the arc column [7].
2.1.2 Electrical and Thermal Properties of Stable Arc Regions
The electrode-column junctions are regions of sharp electrical and thermal transition and
discontinuity [7]. Electrically, a transition must be made from a metallic conductor in
which the current is carried solely by electrons to a gaseous conductor in which both electrons and ions carry current. The anode collects electrons carrying current from the arc
column by having a negative space-charge region in front of the anode to accelerate the
electrons from the column to permit sufficient ionization in this region. The cathode provides electrons which are accelerated across a high-field region, the cathode sheath, until
they have enough energy to ionize neutral particles. This active role of the cathode makes
it strongly material dependent [9].
Chapter 2
20
The electrodes are generally relatively hot compared to the gas in most automotive arcs.
In a sustained arc, the temperature of the electrodes often approaches the boiling point of
the electrode material and its vapor may enter the gas in substantial quantities. Near the
electrodes, the arc may burn in a mixture of gas and vapor and the pressures in the three
regions of the arc are likely to be very different [7]. With these complexities in mind, a
quick overview of cathode phenomena is explored before moving onto a discussion of
how the 42V system is affected by stable arcs.
2.2 The Cathode Phenomenon
The minimum voltage, Vm, to sustain an arc is mainly determined from the cathode drop
VC and anode drop Va of the arc. The cathode potential fall is usually much larger than the
anode fall. This is largely due to the fact that it is much more difficult for electrons to flow
from the cathode into the plasma column than to enter the anode from the plasma column
[6, 7]. Therefore, an understanding of the cathode phenomenon will help explain the
physics of Vm.
An overview of the emission of primary electrons from the cathode will assist in the
understanding of the physical behavior of the arc in the cathode region. When the cathode
consists of refractory material such as carbon, it does not melt when the cathode spot
reaches high temperatures. Electron emissions are mostly thermionic in this case [6, 9,
10]. However, for cathodes with low melting points (copper, silver, iron), the process is
somewhat more complicated and is still in a state of debate [9, 10]. However, many investigators consider that electron emission from the cathode involves a combination of therChapter 2
21
mionic and field emission, called TF emission [6, 9]. The strong electric field at the
boiling front of the cathode, probably enhanced by local surface imperfections, increases
the emission of electrons [9]. It has been postulated that TF emission is influenced by the
strong cathode field that leads to the Schottky correction, which increases thermionic
emission. This is illustrated by the Richardson-Dushman equation for current density J
3
[A/m 2 ]
with the Schottky correction
~
2
J = A T exp
A -
4it mk 2
e 3E
47ErciJ
~ 1.2 x 10
h 3m
E<
e E
in a strong field:
where T is temperature in degrees Kelvin,
6 A
22 is the Richardson-Dushman constant of thermionic
K
emission, k = 1.38 x 10-23 J is Boltzmann's constant, h = 6.6256 x 10K -s
34 J
- s is
Planck's constant, (D is the work function for the height of the potential barrier above the
Fermi level, E is the electric field strength in volts/meter, e = 1.6 x 10 -1C is the electron
charge, m = 9.11 x 10
-31
kg is the mass of an electron, and E
= 8.854 x 10
-12F
-
m
is the
dielectric permittivity of free space [11].
With a general understanding of arc formation and electron emission now established, we
next look at the significance of the physical quantities Im and Vm applied to a 42V system
in an automobile.
22
Chapter 22
Chapter
22
2.3 The Minimum Arc Current, Im
The minimum arc current is dependent on the material at the anode of the arc and is
affected by relative humidity [6]. Since Im is usually on the order of less than 1 amp, as
seen in Table 1 for several metals, and the peak currents resulting from shorting the battery
are one to two orders of magnitude greater, the minimum current mark is assumed to be
met in all cases investigated in this thesis [6].
TABLE 1. Minimum arc currents for various anode materials in air [6].
Contact Material
C
Zn
Bronze
Im (A)
Ag
Ni
Cu
0.4
0.4
Steel
0.5
0.03
0.1
0.31
0.43
2.4 The Minimum Arc Voltage, Vm
The minimum arc voltage is mainly dependent on the material at the cathode of the arc.
This follows the fact that the cathode drop dominates the minimum arc voltage, which is
related to how easily the electron can escape from the electrode and enter the plasma colvalues [6].
umn. Table 2 lists some electrode materials and their Vm
Chapter 2
23
TABLE 2. Minimum arc voltages for various cathode materials in air [6].
Contact Material
Sb
Vm (V)
10.5
Zn
10.5
Ag
12
Cu
13
Bronze
13.5
Sn
13.5
Al
14
Ni
14
Au
15
Steel
15
Pt
17.5
Carbon
20
2.5 Voltage-Current Characteristics of Stable Arcs
The voltage-current characteristics of the arc as the gap size varies are also of considerable
interest when it comes to investigating the possible conditions for a stable arc. The nonlinear relation between the voltage and the current makes it difficult to analyze mathematically so that a common approach is to use a graphical method. In Figure 2, a series of
empirically determined hyperbolic-like curves represent the voltage-current characteristics of free burning arcs with copper electrodes [3]. The parameter in the graph is the contact gap. The data for the curves are obtained experimentally because it is very difficult to
theoretically describe these curves as no complete model has been developed. In fact, the
Chapter 2
24
data obtained for these curves are from static arcs. The gap is increased very slowly and
measurements are made at every point. Each of the hyperbolic curves represents a particular arc length for various voltage and current that sustain the arc [6].
V
Varc 40
o
300
Go
70
200
0
contact gap
(MM)
10
170
0
0
1S0
30
20
10
200
4140
90
120
110
100
so
40
70
so
70
60
so
80
40
30
20
10
100
s
so
40
40
60
70
so
2
40
20
10
0iU
io
IV
40
NA
FIGURE 2. Empirically determined voltage-current characteristics of arcs at various gap lengths
with copper electrodes [3].
An equivalent circuit of a typical arcing event is shown in Figure 3. Typical tests have I/R
time constants on the order of lOps and chopper periods just under one second. Since the
UR time constant is usually short compared to the time for the mechanical chopper to
move, the steady state operating point can be found from Figure 4, which shows the cur-
Chapter 2
25
rent load line from Figure 3 with a representative hyperbolic-like characteristic from
Figure 2, assuming that the circuit is in the DC steady state so the inductance can be
neglected. For gap di, this can lead to two operating points, A and B. To find the stability
of these two points, the effects of a perturbation in current i is examined, assuming a constant supply voltage VbatThe incremental resistance of the arc is negative, dVrIdI = -Rarc, where Rarc is the magnitude of the incremental arc resistance, and can be found as the slope of the curve at a
given operating point. The total incremental circuit resistance in Figure 3 is then (R Rarc). The time constant for transients is then L/(R - Rarc). At point A, because Rarc > R,
the time constant is negative. The transient therefore grows exponentially with time, making it unstable. At point B, because Rarc < R, the time constant is positive, leading to a
stable transient. Thus, the stable operating point in Figure 4 is at point B.
R
Fbat
3
L
Arc tets
FIGURE 3. Equivalent circuit of arcing tests.
Chapter 2
26
Varc
Vbat
A
C
d
contact gap
Vb 8 I
R
FIGURE 4. Two representative arc characteristic curves with different gaps (d2 >dl) with circuit
load line of Figure 3.
Another qualitative explanation why the stable operating point is at B is that if the characteristic curve has a section below the load line for a given gap length, dl, more voltage is
available for the arc than is needed to maintain its state; therefore the arc is heated, its conductance increases and so does the current until equilibrium is attained at stable point B, at
the crossing of the load line and characteristic curve. With the stable operating point
determined, it is possible to find the operating point of the maximum length of the arc
before it extinguishes, called the arc extinction length. If the arc is slowly lengthened, the
stable point moves along the load line in the direction of decreasing current (increasing
voltage) until it crosses the characteristic curve of the new gap length. The arc discharge
cannot be sustained any longer when the load line falls just below the tangent to the characteristic curve at point C and the arc extinction length, d2 , is reached [3, 6].
27
Chapter 22
Chapter
27
Chapter 3
Theory of Fuse Operation and the Determination of Test Matrix Parameters
In the previous chapter, a discussion of arc theory is presented. In this chapter, the discussion shifts to analyzing conditions under which arcing may occur in an automobile. As
mentioned earlier, there are many places in the automobile where arcing may take place.
However, this thesis project focuses on a worst case scenario that may take place in the car
involving repetitive, uncontained arcs with high initial current. These high current short
circuits with subsequent arcs are likely to result from intermittent shorts of the battery via
periodic contacts between a metal wire and the steel chassis.
This chapter discusses the test conditions of two voltage systems, the 14V system and the
42V system. The 14V system generates its power from a 12V battery with a 14V alternator whereas the 42V system generates its power from a voltage supply of 36V with a 42V
alternator. Because the minimum arc voltage is 15V for steel, arcs formed with a 12-14V
supply are unstable and those formed with a 36-42V supply are stable. All the experiments in this thesis were operated with either a 12V battery or 36V from three 12 volt batteries. Thus, 12V test parameters resulted in unstable arcs, whereas 36V tests resulted in
stable arcs. The determination of these test parameters will be discussed in detail in section 3.3.
The primary function of a fuse is to protect the system from short circuit overloads. Without the fuse in the system, high currents, given enough time, could cause the metal wire to
Chapter 3
28
heat up and, in turn, lead to burning insulation. Damage could also be done to transformers, conductors, motors, and the many other components and loads that make up the electrical distribution system. Essentially, the fuse will clear and bring the system to a safe
state when it carries too much current for a given duration, or a given current for too long.
Both factors depend on the ampere rating of the individual fuse.
Two common types of automotive blade fuses are used in this thesis experiment, the SAE
standard "Blade Type Electric Fuse" (SAE J1284) and "Miniature Blade Type Electrical
Fuse" (SAE J2077). These SAE standard fuses have a 32V fuse voltage rating [12]. Specifically, the Bussman ATC blade (regular) and Littelfuse Miniblade (miniature blade)
fuses were used to run 12V tests. Following similar dimension standards, some manufactures have begun to develop fuses with higher voltage ratings fit for the 42V system.
Blade type samples from Pudenz, called TAC, with a 58V rating and Miniblade type samples from Littelfuse with a similar voltage rating were used in 36V tests.
3.1 Fuse Operation
The voltage and current ratings of fuses, compared to the voltages and currents in the system under consideration, determine the fuse that is appropriate for a particular system.
3.1.1 Voltage Rating
The voltage rating of a fuse is a function of its capability to open a circuit under an overcurrent condition. Specifically, the voltage rating determines the ability of the fuse to suppress the internal arcing that occurs after a fuse link melts and an arc is produced. The
voltage rating of a fuse must be at least equal to or greater than the circuit voltage. If a
Chapter 3
29
fuse is used with a voltage rating lower than the circuit voltage, arc suppression will be
impaired and, under some fault current conditions, the fuse may not clear the overcurrent
safely. Figure 5 shows sample data obtained by a fuse manufacturer comparing arc duration, which is an important factor in determining arc suppression, in 32V fuses and that in
58V fuses for supply voltages beyond 25 volts [13]. The graph shows that the 58V fuse
clearly has lower arcing time for higher voltages. Fuses are sensitive to changes in current, not voltage, maintaining their "status quo" operation at any voltage from zero to the
maximum voltage rating of the fuse [14, 15]. Therefore, the industry generally uses 32V
fuse ratings for 12-14V systems and 58V fuse ratings for 36-42V systems. The 58V fuses
used in thesis experiments have similar shapes as 32V fuses but with a recessed slot and
can fit in the 32V fuse holder, so for future automotive applications a 58V fuse can also be
used in 12V vehicles. However, for safety purposes, the 58V fuse holder has a protrusion
that fits into the recessed slot of the 58V fuse but which does not allow a 32V fuse to fit.
32V fuse
8000
6000-
ES 5000'
S4000'
58V TAC
3 000'
S2000'
1000'
0
10
20
30
40
50
60
Voltage [V]
FIGURE 5. Empirical data for arc duration comparison between 32V fuses and 58V fuses for a
range of voltages [13].
Chapter 3
30
3.1.2 Current Rating
Since it is standard to use a fuse to protect a system capable of supplying high currents, the
conditions to be simulated must satisfy this constraint. The short circuit time duration
must be short enough and the contact frequency must be low enough not to blow the fuse.
Taking a look at a fuse time-current curve will help explain the conditions that will not
lead to faulting of the fuse.
The allowed current for a family of standard 32V ATC blade fuse curves at 25 0C as a function of current duration is shown in Figure 6, ranging from nominal ratings of 3 amps to 40
amps, and 32V Miniblade fuse curves are shown in Figure 7. The nominal rating refers to
an industry specified maximum amount of current that the fuse will allow to pass for an
indefinite amount of time without faulting. The actual maximum amount of current that
the fuse allows to pass for an indefinite amount of time can be obtained from the graph
where current becomes approximately independent of time as the curves approach vertical
asymptotes. The amount of current at the asymptote for each fuse is referred to as the sustainable current level, Isustain. Because of inherent differences in fuses as part of the manufacturing process, there is a deviation from the pictured curves, and the fuse industry uses
a standard of giving a fuse a nominal rating about 75% of the sustainable current level [12,
16]. Fuse curves of the developing 58V fuses are not yet available.
Chapter 3
31
100
--
l -f F-E
AMPERE
RATING
I
I
I Y
10
0t
z
1
-1
-.
L
N
.01 '
0
.
CURRENT IN AMPERES
FIGURE 6. 32V ATC blade family fuse curves at 25'C [14].
Chapter 3
32
I
Imn.
i§s
I
I
I
I~ I f
I
I
I
I
I
10-
w
0. 01-
0.1
1
100
10
CURRENT IN AMPERES
1000
FIGURE 7. 32V Miniblade family fuse curves at 25"C [15].
33
Chapter 33
Chapter
33
For high currents (and corresponding short times) it can be assumed that Joule (12 R) heat
generated in the fuse element remains there. Due to the short time, the amount of heat
which can be transferred out of the element is negligible. Under these conditions, the fuse
melts when a fixed amount of energy has been deposited in the element. Since the energy
deposited is given by E = fI2Rdt' and since R is not a strong temperature function for
fuse materials and over the short time interval for a fuse to blow R can be assumed to
remain approximately constant, the fuse will blow when a fixed value of
jr I 2dt' is
achieved. For a constant I, this requirement implies that I2 t will be a constant at interruption. Fuse curves typically contain a region at high currents where the curve is a downward-sloping line with slope -2 decades/decade on log-log coordinates. This is the region
in which a constant value of 12 t is required for fusing.
A fuse curve is shown in Figure 8 for a 32V Miniblade fuse with a 15A nominal rating.
This curve will be used as an example to help illustrate the operating conditions of a fuse.
The fuse curve reflects the maximum amount of current I for a given time t, or vice versa,
without causing the fuse to blow. For instance, according to the fuse curve, this 15A fuse
is able to carry approximately a maximum of 165 amps for a duration of lOms. Or conversely, 165 amps can flow through the fuse for a maximum duration of lOms. In short,
operating in the region to the left of the curve should not lead to the melting of the fuse,
whereas operating in the region to the right should.
34
Chapter 33
34
100.
l.j*....
........
10
W-
f...._
.x
.....
C',
...A.M
.......-
S
0o1
CURRENT
FIGURE 8. 15A ATC blade fuse curve at 25 0 C with Isustain
= 21A
[14].
3.2 RMS Current
It is the intent of this thesis research to identify and test worst case arcing possibilities.
This translates to uncontained, repetitive arcs with high initial current as stated in Chapter
1, section 1.1. It will be shown in this section how it is possible to achieve this in a system
protected by a fuse. In creating worst test cases, we first identify the highest possible current magnitude for a given short-circuit current pulse duration without clearing the fuse.
Then, given this maximum current magnitude for selected time durations, we select the
highest possible frequency for a train of pulses without clearing the fuse. This yields both
Chapter 3
35
the highest possible current for each contact and the highest frequency of shortings without clearing the fuse.
In order to insure that the fuse does not blow due to a long train of current pulses, it should
be sufficient to limit the Joule heating of the fuse to a value equal to or below the Joule
heating experienced at
sustain.
The relevant criterion to assure that this condition is met is
Irms :5 Isustain, where Irms is the root-mean-square value of the current, calculated over a
complete cycle. In the experiments, the current pulses result from the periodic contact
between the chopper blade and the metal wire. The RMS current, Irms, is given by
Irms
T
I2(t)dt
(>
where t is instantaneous time, T is the period of the current pulses, and the current, I, is a
function of time. Due to the transitory nature of an unstable arc, the current drops rapidly
to zero as the arc is broken up immediately after it is formed. The measured current waveform in an experiment establishing an unstable arc (further described in chapter 2) is
shown in Figure 9. It can be approximated by a square current pulse of duration D and
magnitude I,,x, (Figure 10). The duration of current flow prior to the falling edge is a
consequence of the short circuit. The falling edge displays where the arc occurs and extinguishes. In Figure 11, Irms is shown for a sequential train of measured current pulses.
36
Chapter 33
36
144.0
96.0
48.0
0)
0
C
-48.0
-96.0
-144.0
-30
-20
-10
0
10
Time (ins)
20
FIGURE 9. Measured current waveform
30
of an unstable arc.
1(t)
"flax
D
T
t
FIGURE 10. Ideal square current pulse as an approximation to the measured waveforms in
Figures 9 and 11.
Chapter 3
37
144.0
96.0
48.0
0
CD
-48.0
-96.0
-144.0
-300
-200
-100
0
100
200
300
Time (ins)
FIGURE 11. Measured train of current pulses.
3.2.1 RMS Current of Unstable Arc
The RMS current given by (1) for a train of ideal square current pulses of width D and
period T shown in Figure 10 is
I rms =
1D2
T
0
I max
(t)dt
(2)
For the square pulse, Imax is constant over a time duration D and (2) simplifies to
Irms =max
where Ia
(3)
= Vba/R is the DC circuit current of Figure 3 with closed circuit contacts so
that Varc = 0.
Chapter 3
38
3.2.2 RMS Current of Stable Arc
Because a stable arc is sustained after contacts break, current continues to flow in the circuit until the voltage source is no longer able to sustain the arc as the gap distance reaches
the arc extinction length. Typical thesis experiments have a mechanical chopper rate of
order 1.1 - 1.4 Hz. The measured current waveform of a typical stable arc is shown in Figure 12. The rectangular portion before time = 0 is the current in the circuit before the contacts part. When the contacts do part, the current falls quickly to a new value, and then
falls slowly as the arc length increases.
144.0
96.0
48.0
0
0
0-%
-48.0
-96.0
-144.0
-30
-20
-10
0
10
Time (ms)
20
30
FIGURE 12. Measured current waveform of stable arc.
39
Chapter 33
Chapter
39
Because the continuous current flow delivers additional energy to the fuse, the RMS current for the stable arc must include the additional current flow
I j(D+tarc)
f
Irms
=
2
(4)
(t)dt
T
where tarc is the duration of the stable arc after the initial pulse of duration D, as idealized
in Figure 13.
The triangular shaped tail in the graph reflects a non-linear relation between current flow
and arc length. However, modeling the current as a linear function of time as the gap distance increases gives a close estimate. Therefore, if the current waveform for a stable arc
is modeled as a square pulse followed by a triangle (Figure 13), then the RMS current of
the new pulse can be obtained by piecewise analysis.
Irms =
rms
OI
0
(t)dt +
(5)
+ tarc 2(t)dt
max,
1(t)
I n =I
I
D
D+ t
T
t
FIGURE 13. Idealized model of stable arc waveform where O<k<1.
Chapter 3
40
Modeling the arc current as a linear function of time (Figure 14) for D<t<D+tarc,the current function becomes
I(t') = klmax(
(6)
twa re
where O<k<1, and t' = (t - D). The initial arc current at t'=0 is equal to kIma-*
1(t')
kmax
t'I
tare
FIGURE 14. Arc current as a function of time for t' = t - D.
Integrating over tarc, the second part under the square root in (5) becomes
j
arc
T0
2
2 2'
k Iax
ma(
t
ar
,
2 2
tarc
dt = k Imax
3T(
(7
The value of k is a function of the source voltage Vbat and the stable arc voltage characteristic for a very small gap. Assuming that at the instant after the electrodes part, the stable
arc voltage is the value Vm, k can be determined by load line analysis as shown in Chapter
Chapter 3
41
2. The result is k = 1 - VIVbat. For steel with Vm =15V and Vbat =36V, k =0.58 [6]. The-
sis experiments show that the value k = 0.5 is typical and will be used in further analysis.
Given all the uncertainties and approximations plus circuit variations due to blade and
wire damage from test to test, and decreasing Vbat as experiments proceed, k = 0.5 is a
good representative value for thesis experiments. Substituting (3) and (7) into (5) for
k=0.5, we obtain
D +tarc
D+12
Irms
max
T
(8)
This equation tells us that the additional amount of energy delivered to the fuse during the
arc is equal to that of a square pulse of magnitude Ima and duration tar1
2
for k=0.5.
3.3 Determination of Test Matrix Parameters
The basis for determining test matrix parameters comes from the desire to test at high current and yet not to blow the fuse. Therefore, knowing that a high power cyclic short circuit condition can exist on a fused circuit without blowing the fuse if the two following
requirements are met, circuit parameters that will allow these conditions can be determined:
1) The peak current is less than the maximum allowed current given by the fuse
curve for the time duration of the pulse.
2) The RMS current is less than the sustainable current given by the fuse rating.
Chapter 3
42
3.3.1 12V Test Matrix
A range of peak current durations from 10ms to 50ms, in increments of lOms, is selected
for testing because they are reflective of likely cases in automotive systems. For each
duration, D, the maximum allowable current for the fuse of a given rating can be found on
the fuse curve. In the matrices of Figures (15) and (16), the maximum allowable current
as a function of time is estimated from reading the manufacturer's fuse curve and recognizing that the slope of these curves is equivalent to the exponential term n of the power
law equation I(t)=Atn relating current and time in the high current, short time duration linear region of the log-log plot. The constant A is specific to each curve. As 12t is equal to a
constant in this region, as described earlier in section 3.1.2, n is theoretically equal to -0.5.
However, possibly because of cooling effects, fuse resistance changing with temperature,
and other non-idealities, the slope slightly deviates from this value.
Because the test setup is designed so that the resistance of the test wire dominates the
resistance of the system circuit, a length of a given wire gauge can be chosen to limit the
current to the desired amount in order to satisfy the first requirement listed above in section 3.3. That is, the peak current must be less than the maximum current allowed given
by the fuse for the time duration given by the fuse curve. To satisfy the second requirement, the RMS current must be below the sustainable current of the fuse. This is accomplished by selecting a chopper frequency (l/T) that will yield an RMS current less than the
sustainable current. The 12V test matrix for 32V ATC blade fuses and Miniblade fuses
are shown in Figures (15) and (16). The sustainable current is listed in parentheses next to
the nominal rating of the fuse followed by the current-time relationship obtained from the
Chapter 3
43
fuse curves. Figure 15 12V tests were conducted with the maximum allowed chopper
period of T=900ms for the available apparatus, but the resulting RMS current was still
close to the fuse sustainable current. Figure 16 12V tests all had chopper blade periods
less than 900ms so the listed periods were the exact computed value so that the RMS current equaled the fuse sustainable current.
44
Chapter
Chapter 33
44
ATC Fuses
IOA Fuse (12A)
I = 588 *t -056
Contact Time (ms)
I max Period (T) Resistance (mQ)
10 113A
900ms
Wire Length
150 14.5'
184 17.8'
40 56A
214 20.7'
50 50A
240 23.2'
10
20
30
40
50
20A Fuse (25A)
I = 1483 * t- 0.57
Contact Time (ms)
I max Period (T) Resistance (me)
189A
134A
109A
94A
84A
63
89
110
127
143
Wire Length
9.7'
13.7'
16.9'
19.5'
22.0'
@ 18 AWG
.Wire Length
@
16 AWG
@
14 AWG
Imax Period (T)
10 237A
20
30
40
50
900ms
AWG
106 10.2'
20 80A
30 65A
15A Fuse (21A)
I= 980 * t-05
Contact Time (ms)
@ 20
Resistance (me)
50 12.2'
900ms
72
88
101
113
167A
136A
118A
106A
17.6'
21.5'
24.7'
27.6'
25A Fuse (33A)
0 53
I = 1870 *tContact Time (ms)
I-max Period (T)
10 313A 900ms
20 221A
Resistance (mn)
66 25.6'
77 29.9'
85 33.0'
30 180A
40 156A
50 140A
30A Fuse (42A)
I = 4025 * t_0.56
Contact Time (ms)
Imax Period (T)
10 398A
20
30
40
50
281A
230A
199A
178A
Wire Length
38 14.8'
54 21.0'
900ms
Resistance (m!Q)
Wire Length
@ 12 AWG
30 18.5'
42
52
60
67
25.9'
32.1'
37.1'
41.4'
FIGURE 15. 12V Test matrix with ATC blade fuses with maximum mechanical chopper blade
period T=900ms.
Chapter 3
45
Miniblade Fuses
10A Fuse (13A)
I = 202 *_
Contact Time (ms)
___
Imax
83A
63A
54A
49A
44A
Period (T) Resistance (mO)
144
407ms
190
469ms
222
517ms
244
568ms
272
572ms
Wire Length
13.9'
18.4'
21.4'
23.6'
26.3'
@ 20 AWG
10
20
30
40
50
Period ()
632ms
664ms
693ms
702ms
725ms
Resistance (mf))
72
99
118
136
150
Wire Length
11.1'
15.2'
18.1'
20.9'
23.1'
@ 18 AWG
10
20
30
40
50
max
167A
121A
101A
88A
80A
10
20
30
40
50
I max
204A
148A
122A
107A
96A
Period (T) Resistance (mQ)
59
570ms
81
600ms
98
612ms
112
628ms
125
632ms
10
20
30
40
50
Imax
261A
200A
164A
142A
128A
Period (T) Resistance (mO) Wire Length @ 14 AWG
46 17.8'
556ms
60 23.3'
653ms
73 28.3'
658ms
84 32.6'
658ms
93 36.1'
668ms
15A Fuse (21A)
I = 479 * CO."
Contact Time (ms)
20A Fuse (27A)
I = 600 * t
Contact Time (ms)
Wire Length @ 16 AWG
14.4'
19.8'
23.9'
27.4'
30.5'
25A Fuse (35A)
I = 855 * t048
Contact Time (ms)
30A Fuse (42A)
I = 908 * t .4
Contact Time (ms)
Imax
10 336A
20 249A
30 209A
40 185A
50,168A
Period (T) Resistance (mO)
35
640ms
48
703ms
57
742ms
65
776ms
71
00ms
Wire Length @ 12 AWG
21.6'
29.6'
35.2'
40.1'
43.9'
FIGURE 16. 12V Test matrix with Miniblade fuses for various mechanical chopper blade periods
so that the RMS current equals the fuse sustainable currents.
Chapter 3
46
3.3.2 36V Test Matrix
For the 36V testing, the matrix parameters are determined somewhat differently than the
12V matrix parameters due to the presence of the stable arc. As shown in section 3.2.2,
additional energy is delivered to the fuse by the continuous flow of current during the stable arc. The arc duration tare, which depends on the resistive load that limits the magnitude of the peak current and the speed at which the gap distance increases, is important in
calculating the amount of energy delivered to the fuse. Since Irms depends on both T and
tarc, and tarc depends on T, an iterative numerical method is required to find the appropriate
T that sets Irms less than the sustainable current. However, the period obtained is often
beyond the lower frequency limitation of the experimental apparatus. The chopper motion
becomes jerky if the frequency is below 1.1 Hz. Therefore, as previously stated, the longest period allowed by the apparatus is set at T=900ms and circuit parameters are obtained
as follows.
First, the range of peak current durations from 10ms to 50ms remains the same as for the
12V tests listed in Figures (15) and (16). For a given period of 700ms for Miniblade fuses
or 900ms for TAC fuses, tarc is found from the experimentally obtained arc duration vs.
resistance graphs in Figures (17) and (18). The reason that the period of 700ms was
selected to run for Miniblade fuse tests and 900ms to run for TAC fuse tests shall be
explained at the end of this section where it will make more sense to the reader. These relatively low contact frequencies could realistically occur, for example, as the car goes over
sequential bumps.
47
Chapter 33
47
Arc Time vs. Resistance for T=700ms
62
60
a'
58-
x
5654524oU
48 1
4644I'
42
200
250
300
350
400
450
500
550
600
650
Resistance (mohm)
FIGURE 17. Graph of measured Arc Time vs. Circuit Resistance for T=700ms
Miniblade fuses designed for 36-42V applications.
used with
Arc Time vs. Resistance for T=900ms
N
75-
70-
E65
U 60
7
U
55
-
501
45
200
250
300
350
400
450
500
550
600
650
Resistance (mohm)
FIGURE 18. Graph of measured Arc Time vs. Circuit Resistance for T=900ms used with 58V TAC
blade fuses.
48
Chapter 33
Chapter
48
The additional energy delivered during trc leads to a modified RMS current value given
by (8). The RMS current value of a stable arc of duration tarc is equivalent to the RMS
value of a square pulse of duration (tar1 2) for k=0.5. Therefore, the new waveform can
be viewed as equivalent to an extended square pulse. Because of the longer effective time
duration of the pulse, the maximum current allowed to pass by the fuse according to the
fuse curve becomes lower than that of a time pulse of duration D. Then, I,,,
eff
for
(D+tar/1]2)is found on the fuse curve. In the 36V matrices of Figures 19 and 20, tarc is
referred to as "Arc Time" and (D+tar'1l2 ) is referred to as "Total Time."
Since the chopper period is already set at T=900ms (TAC) or T=700ms (Miniblade) for
the 36V matrix, we cannot adjust frequency to make the RMS current over the cycle equal
to the sustainable current. It is possible to calculate the maximum allowable current
amplitude Iax that will not blow the fuse over many cycles. Then in order not to blow the
fuse on the first contact and on the subsequent contacts, the lesser of the two maximum
allowable current values is taken. From our calculations, it turns out that a contact period
of 700ms for Miniblade fuse tests resulted in relatively close Imx and Ia,
eff values
for
most cases. This in turn yields almost the highest current pulse value for selected durations that we sought. For TAC fuse tests, calculations show that a contact period of over 2
seconds is necessary for many tests to achieve a maximum current pulse given by the fuse
curves without blowing the fuse. However, because the mechanical chopper used for this
research can run smoothly only up to a maximum period of 900ms, this value was used for
TAC fuse tests. Finally, to limit the current to this effective Imx, resistance in the form of
49
Chapter 33
Chapter
49
test wiring is added to the system. The 36V test matrices are shown for TAC blade fuses
(Figure 19) and Miniblade fuses (Figure 20) for 36V testing.
50
Chapter
Chapter 33
50
TAC Fuses
I = 588 * t-.
Period (T) (ms) Arc Time Total Time (ms) Imax fuse
10
900
62
15 129A
I max rms
90A
20
56
25 97A
70A
70A
514 49.6'
30
40
50
50
45
43
34 82A
44 71A
54 63A
60A
53A
48A
60A
53A
48A
600 57.9'
679 65.6'
750 72.4'
I max rms
150A
I max effective Resistance (mnn)
Wire Length @ 18 AWG
150A
240 36.9'
10A Fuse (12A)
Contact Time (ms)
rb
I =980* t*
Period (T)
15A Fuse (21A)
Contact Time (ms)
10
Wire Length @ 20 AWG
I max effective Resistance (mCI)
90A
400 38.6'
_
Arc Time Total Time (ms) I max fuse
900
70
16 209A
20
30
66
62
26 159A
35 135A
117A
1OGA
117A
100A
308 47.3'
360 55.3'
40
50
60
59
45 120A
55 105A
88A
80A
88A
409 62.8'
450 69.1'
I max ms
187A
I max effective Resistance (mil) Wire Length C 16 AWG
187A
193 47.1'
245 59.8'
288 70.3'
327 79.9'
360 87.9'
I = 1483 * tPeriod (T)
20A Fuse (25A)
Contact Time (ms)
10
900
Arc Time Total Time (ms) Imax fuse
72
16 317A
80A
20
30
40
70
67
65
26 232A
36 192A
45 170A
147A
110A
147A
125A
110A
50
62
55 151A
100A
IOOA
I= 1870 * t-5
Period (T)
25A Fuse (33A)
Contact Time (ms)
10
20
30
40
50
Arc Time Total Time (ms)
900
75
16
73
26
71
36
46
69
68
56
I = 4025 * t0.
Period (T)
30A Fuse (42A)
Contact Time (ms)
10
20
30
40
50
900
125A
Imax fuse I max rms
447A
247A
334A
194A
282A
165A
247A
145A
223A
132A
Arc Time Total Time (ms) Imax fuse Imax-rms
78
17 812A
315A
75
26 637A
247A
74
72
71
36 530A
46 461A
56 413A
210A
185A
168A
I max effective Resistance (mn)
247A
146
194A
186
165A
218
248
145A
132A
273
Wire Length @ 14 AWG
56.7'
72.2'
84.7'
96.3'
106.0'
I max effective Resistance (mf)) Wire Length @ 12 AWG
315A
114 70.4'
247A
210A
185A
168A
146 90.2'
171 105.6'
195 120.4'
214 132.2'
Miniblade Fuses
1OA Fuse
I = 202 * t_-0-38
(13A)
Contact Time (ms)
Period (T) (ms)
10
700
20
30
40
50
Imax rms
I max effective
14 73A
88A
73A
493 47.6'
43
41
38
37
24 59A
33 52A
43 47A
53 43A
68A
58A
51A
46A
59A
52A
610 58.9'
47A
43A
Imax fuse
I max rms
I max effective
59
15 138A
143A
138A
20
30
55
52
25 109A
34 95A
111A
93A
109A
93A
40
51
44 85A
82A
82A
50
50
54 77A
74A
74A
700
I = 600 * t-0.47
Period (T)
20A Fuse (27A)
Contact Time (ms)
Resistance (mQ)
Wire Length @ 20 AWG
692 66.8'
766 74.0'
837 809'
_
Arc Time Total Time (ms)
Period (T)
10
M1
Imax fuse
50
I= 479* t- 4
15A Fuse (21A)
Contact Time (ms)
C
Arc Time Total Time (ms)
10
20
30
40
Arc Time Total Time (ms)
700
50
Resistance (mn)
261
330
379
439
486
I max rms
I max effective Resistance (mO)
61
58
55
54
15 169A
25 133A
35 114A
45 101A
184A
142A
120A
106A
169A
133A
114A
101A
52
54 93A
96A
93A
I max effective
229A
179A
152A
134A
Imaxfuse
Wire Length @ 18 AWG
40.1'
50.7'
58.2'
67.4'
74.6'
Wire Length
@ 16 AWG
213 52.0'
271 66.2
316 77.2'
356 86.9'
387 94.5'
I = 855 * t_-0.48
25A Fuse (35A)
Contact Time (ms)
Period (T)
10
20
30
Arc Time Total Time (ms)
62
15
61
25
60
35
59
45
56
55
Imaxfuse
229A
179A
152A
I max rms
239A
185A
156A
134A
122A
138A
124A
Arc Time Total Time (ms)
700
64
15
62
25
61
35
61
45
60
55
I max fuse
282A
227A
196A
176A
161A
700
40
50
I = 908 * t
30A Fuse (42A)
Contact Time (ms)
Period (T)
10
20
30
40
50_
122A
Wire Length @ 14 AWG
61.0'
78.1'
92.0'
269 104.5'
295 114.6'
Resistance (mn)
157
201
237
___4_3
I max ms
286A
222A
187A
165A
149A
I max effective
282A
222A
187A
165A
149A
Resistance (in()
Wire Length
128 79.1'
162 100.1'
192 118.6'
2181134.7'
2421149.5'
12 AWG
Chapter 4
Experimental Setup
In this chapter, a discussion of the experimental test setup is presented. First, an overview
of the test system is given, listing the extensions made by this thesis research to the Yazaki
experiment mentioned in section 1.2. Then, individual components of the test system are
described in detail, including the circuitry and the method of operation.
4.1 System Overview
To simulate the intermittent shorting of a battery in a car, a mechanical chopper device is
used to create a periodic short circuit overload. The test setup consists of a motor driven
blade that makes recurring intermittent contacts with a wire stripped of its insulation. An
overview of the test setup can by found in the system diagram in Figure 21. The original
experimental setup used for the research done by Yazaki include the following components shown in the system diagram.
1.
2.
3.
4.
5.
6.
Battery
Shunt
Test Wire
Blade
Motor
Oscilloscope
The extensions made by this thesis research added the following components shown in the
system diagram to improve this experiment.
1. Fuse
2. MOSFET
3. Resistance
4. Contact Sensor
5. Control
6. PC
Chapter 4
53
Shunt
Battery
Fuse
MOSFET
Resistance
Blade
System Circuit
-i- --
-- -- - - - --t- -- - -t
|
Sensor
Motor
SControl
FIGURE 21. Experimental test system diagram.
Fuse
wi
Blade
wire
+
bat
HEMOSFET
_
-T
Rshunt
FIGURE 22. Experimental test system circuit.
54
Chapter
Chapter 44
54
The system circuit in Figure 22 illustrates the current path. Starting from the positive terminal of the battery, a fuse is placed in the circuit. The physical presence of the fuse verifies that the current magnitude, duration and chopping frequency created for each
experiment are conditions that could exist in an automotive circuit protected by a fuse.
Connected to the fuse is a resistance Rwire, which is formed for the various tests by variable lengths and gauges of wire. This wire comprises the dominant resistance of the system circuit. The resistance wire is attached to a test wire, a stripped piece of stranded
copper wire of the same gauge that is struck by the motor-controlled steel blade. Arcing
takes place when the blade separates from the wire. The blade strikes the wire at a controlled frequency, and the duration of current flow is also controlled. The frequency at
which the intermittent contact takes place reflects the speed of the DC motor, which is
controlled by the pulse width modulation (PWM) of the motor. A MOSFET constitutes
the next component in the circuit. In an automobile, the duration of a short circuit would
be controlled by the duration of physical contact. It is difficult to control the duration of
physical contact in our apparatus. Thus it is very difficult to control the time duration of
the current flow in a short circuit by this means in our apparatus. The MOSFET allows
more flexibility in controlling the desired amount of time of short circuit. Lastly, measurements of current are made by a shunt resistance Rshunt (<< Rwire) that is connected to the
MOSFET. These circuit elements, in different order, are also evident in Figure 21, inside
the box labeled system circuit. In addition to the system circuit, Figure 21 shows additional instrumentation and control elements.
In devising a method for reliably turning on and off the MOSFET to obtain desired current
flow durations, a contact sensor is used to detect contact between the blade and the test
Chapter 4
55
wire. In turn, the duration of the physical contact between the blade and the test wire is
recorded in the environment control program LabView. This contact duration sets a basis
for the timing scheme of the MOSFET to be described in detail in section 4.3.
Current measurements are made from the shunt resistance by the oscilloscope and the data
is retrieved from the oscilloscope by LabView and stored in the PC. In fact, the experiment is controlled entirely by LabView, including setting the speed of the DC motor, sensing contact between the blade and the copper wire, and turning on and off the MOSFET.
Not pictured in the diagram is a mechanical switch that serves as a safety measure ensuring an open circuit during test preparations. It is placed between the chopper blade and
the MOSFET.
4.2 The Shunt and Sensitivity to Noise
The shunt resistance (Figure 23) from which test measurements are made yields a drop of
50mV at 240A. This translates to an ohmic resistance of 208g9. Therefore, it is somewhat surprising that this extremely accurate measuring device has proven to be sensitive to
noise. Initial test runs experienced noise levels that are significant compared to signal
magnitudes (up to 50% of signal level.) There can be several sources of noise. In the case
of this project, significant noise sources come from other laboratory experiments sharing
the same power circuits, as well as from the motor (brush commutation noise) and signals
coming from the computer used in these experiments. Two methods were considered to
approach the noise problem: by either filtering the noise out or to physically modify the
test setup so that noise which traveled from external sources would be minimized. Filter-
Chapter 4
56
ing could be done physically or digitally. Because both sorts of filtering means that either
the actual system or the signal will be tampered with, and for fear that physical characteristics of the system will be lost from the filtering, minimizing the noise to an acceptable
level became a more attractive option.
FIGURE 23. Shunt resistance used in experimental tests.
The solution to deal with noise that is used for this project consists of using batteries to
power all the components in the setup to eliminate any noise carried through and generated by the power supplies and optically isolating the system from the PC to eliminate
noise from the PC. As a result, the ground potentials of the system, the PC, and the power
supplies are all isolated and no noise is transmitted through ground. The safety ground of
the oscilloscope is left unplugged, so that minimal noise will travel from the PC to the
oscilloscope, where the measurements are made.
57
Chapter 44
57
4.2.1 Power Sources
A 12V volt car battery is used to power the chopper motor and a 12V lantern battery is
used to power the MOSFET driver. Control circuitry requiring a 5V source runs off of
separate voltage-divided 9V radio batteries.
4.2.2 Optical Isolation
Since the PC generates noise and it is able to enter the system by way of the data acquisition (DAQ) board interface, it is essential that the two be isolated. For the optical isolation
between the data acquisition (DAQ) board and the test system, a 6N137 optoisolator by
QT Optoelectronics is used.
4.2.3 Notes on Physical Connections
The shunt is connected directly to the negative terminal of the battery, which serves as the
ground of the system circuit, to minimize noise. The oscilloscope probe is placed across
the shunt to measure current.
4.3 Motor Control
To simulate intermittent shorting events, a mechanical chopper apparatus is used. A DC
motor is used to drive the steel blade in chopping motions, as it periodically strikes the
bare test wire section as shown in Figure 24. The blade mechanism converts motor rotation to cyclic linear motion of the blade, at a rate of one strike per revolution.
Chapter 4
58
I
0
ON
"Bla
FIGURE 24. Motor controlled blade and bare wire section.
The apparatus that performs this function is shown in the setup of Figure 25. In this picture, the test wire is shown on the left, held against an upright plastic back plane. The steel
blade in this picture is approximately 5 cm. to the right of the test wire. The relatively
thick wire connected to the blade leads to a mechanical safety switch as described in section 4.1. The blade is attached to the push rod through four springs, whose purpose is to
allow the blade to enter a state of inertial delay when making contact with the wire while
the push rod completes its cycle of motion. Therefore, the springs provide the contact
durations desired for our tests.
Chapter 4
59
FIGURE 25. The mechanical chopper apparatus used in this research.
In Figure 26 is an enlarged picture of the blade, springs, push rod and guide bearings in
Figure 25. The push rod, constrained to move linearly by guide bearings, is connected to a
plastic block that is situated at the right-most part of the picture, just in front of the metal
disk whose rotational movement is controlled by the DC motor situated behind the rectangular metal flat-piece in Figure 25.
FIGURE 26. An enlarged picture of the blade, springs, push rod and guide bearing in Figure 25.
Chapter 4
60
A bird's-eye view of the DC motor is shown in Figure 27. There is a stub on the disk in
Figure 25 which slides along a vertical slot in the rectangular plastic piece in front of it.
This is again seen in Figure 27 with the rectangular block to the left of the disk. Circular
motion of the stub thus converts to the linear sinusoidal motion of the blade through the
interaction between the stub and the slot. Motor speed, and thereby blade frequency, is
controlled by the PWM drive of the motor. The PWM duty ratio is set by a signal sent by
the data acquisition board (DAQ) in response to a command in LabView (Figure 28).
FIGURE 27. DC Motor used to run mechanical chopper in Figure 25.
61
Chapter
Chapter 44
61
Optoisolator
DAQ
Motr
Motor
FET s
Driver
Power
Source
12V Battery
FIGURE 28. Chopper motor control.
The motor driver is shown in Figure 29. The motor MOSFET driver chip, IR2125, drives
the motor MOSFET IR540. The IR540 and the 40CPQ080 diode handle the motor drive
current. The other components control the driver chip and limit gate current. A high signal from the PC via the optoisolator (OPTO) makes the driver chip turn on the motor
MOSFET and pulls the motor potential high. When the signal goes low and the MOSFET
turns off, the motor input is pulled to ground via the diode. With a periodic rectangular
input, an average value is achieved, which fixes the speed of the motor.
MBR054OCT
+12
+12V5
OPTO
_
IR2125
IR540
6
+
T
----tMotor
1N3826A
40CPQ080
FIGURE 29. PWM circuit to control chopper motor speed.
62
Chapter 44
62
4.4 MOSFET
Because it is very difficult to control the current duration by purely mechanical means, a
MOSFET has been added to the system to provide a more accurate way of obtaining
desired current durations. More specifically, this MOSFET is known as a power MOSFET
(PowerFET) for its ability to handle high peak currents (a maximum of 690A) and its low
on-resistance, Ron of 1.8m9, which are particularly necessary characteristics for this
experiment since the peak currents are high and Ron will have minimal effect on the circuit
resistance (Ron << Rwire). The MOSFET is pictured in Figure 30.
FIGURE 30. The MOSFET used in this research.
The method to obtain desired current duration is as follows. For the first two contacts
between the blade and the wire, the MOSFET is held off. A contact detection circuit is
used to detect the duration of the second contact because the startup acceleration of the
motor leads to a first contact duration not representative of subsequent contacts. When
there is initial contact, LabView records the initial starting time, and the time when contact
Chapter 4
63
is broken. LabView then subtracts these two times and obtains the contact duration; call
this value dma. Because the MOSFET remains off during this time, no current passes
through the main circuit, and thus no arcing results. To obtain the desired current contact
duration, ddesired, we must wait for (dma - ddesired) seconds after contact is made between
the blade and the wire before the MOSFET is turned on, allowing current to pass. Then
the MOSFET remains on long enough to allow the mechanical separation to extinguish the
arc. Because the period is much longer than the duration of contact, leaving the MOSFET
on for the arc to extinguish does not affect the following cycle. The flow of signal from
the PC to the PowerFET is in Figure 31 and the PowerFET driver circuit, which basically
consists of a MIC4422 driver chip, is in Figure 32.
DAQ
1
OptoisolatorL
PowerFETPowerFET
Power
Source
12V Battery
FIGURE 31. PowerFET control of current flow.
64
Chapter
Chapter 44
64
+12V
1
OPTO
2
8
MIC4422
7
3
6
4
5
PwrE
-%A-r---wPowerFET
FIGURE 32. PowerFET driver circuit.
4.5 Contact Detection and Timing
The signal path for detection can be found in Figure 33. The contact detection circuit
consists of an LM311 comparator and a 6N137 optoisolator as seen in Figure 34. Note
that the comparator ground, shared with the main circuit, is different from the ground of
the optoisolator, which is shared by the DAQ, and, in turn, the PC. The input feeding into
the non-inverted input of the comparator is connected to the chopper blade. Initially, when
there is no contact between the blade and the wire, the input is less than a threshold value
set by a resistor divider feeding into the inverted input of the comparator, and the output
gives a low value. When contact is made, the input is greater than the threshold value
since the wire is at either 12V or 36V depending on the test, and the output goes high. The
signal is then fed to the DAQ via the optoisolator. Once LabView receives the signal, an
internal clock starts counting the duration of contact in milliseconds. When the blade
retracts and contact is broken, the comparator outputs a low and the signal is sent to the
Chapter 4
65
DAQ and a value is obtained for the duration of contact. Since the MOSFET remains off
throughout this process, we are able to obtain a representative value of the duration of contact without any arcing. Because the chopper tends to start in a jerky motion, dmax is
obtained from the second contact. The MOSFET turns on during the third striking of the
wire, where the first arcing will occur upon subsequent separation between the blade and
the wire.
Opto-
DAQ
isolator
LM311
System
Comparator
Circuit
FIGURE 33. Contact detection signal path.
Input
+5V
1kO
2
+
8
O+5V
6N137 Optoisolator
LM311
-
-6
DAQ
3 ------------
FIGURE 34. Contact detection circuit.
66
Chapter 44
Chapter
66
4.6 Test Wires
The test wires used for this experiment are standard stranded electric copper wires ranging
from 12 AWG to 20 AWG. The wire gauges and the fuses were matched up in Table 3.
The pairing is reasonable, based on handbook ratings for wire gauges. We believe it is
reasonable for fuses and wire gauges to be similarly coordinated in automobiles. No
industry-specific pairing was available to the author, although one or more such guidelines
are almost certain to exist.
TABLE 3. Wire gauge and fuse pairings used in this research.
Gauge (AWG)
12
Fuse Rating
30A
14
25A
16
20A
18
15A
20
10A
Table 4 lists copper wire resistances at 25 0 C for wire gauges listed in Table 3 [17]. These
values were used to estimate the amount of wire required to obtain desired current values.
TABLE 4. Copper wire resistance values at 25*C [17].
Gauge (AWG)
12
Ft./Ohm
617
14
389
16
244
18
154
20
96.6
67
Chapter 44
67
The test wire pictured in Figure 25 is connected to an amount of wire that provides the
dominant circuit resistance, the wire resistance Rwire, which sets the circuit current. As
described in section 4.1, this circuit component is attached to a fuse, which, in turn, is connected to the positive terminal of the battery via a low resistance cable wire. A picture of
this setup is shown in Figure 35. The fuse in this picture is a 25A TAC fuse and the wire
gauge is 14AWG.
FIGURE 35. Connection of the battery, the fuse and the wire resistance.
68
Chapter 44
68
Chapter 5
Test Results and Discussion
In chapter 3, matrix parameters for 12V and 36V tests were developed for the simulation
of intermittent shortings of the battery without blowing the fuse. These parameters were
chosen for maximum allowable peak currents allowed by the fuse rating without causing
the fuse to fault. Two types of commonly used fuses were tested, the blade fuse and the
miniature blade fuse. Tests with these fuses were run following the guidelines provided
by the matrix parameters, but because of possible manufacturing deviations from the values given by the fuse curves, slightly lower current values were used during actual tests to
allow room for fuse rating variability.
This chapter begins with a discussion of the effects of molten metal that results from arcing. Next, measured peak current, duration and RMS current run under the guidelines of
the 12V and 36V test matrices are shown. Qualitative descriptions such as the post arcing
insulation condition and quantitative measurements such as arc energy are presented and
analyzed. Lastly, a deeper look at wire/chopper blade welding and its implications constitute the final part of this chapter.
5.1 Effects of Electrode Melting as a Result of Sustained Arcing
As described in Chapter 2, section 2.1, a molten metal bridge forms after the separation of
electrodes but prior to arcing. As the electrodes part further, the metal bridge evaporates
and an arc is formed. However, the unstable arc terminates almost instantaneously while
the stable arc is sustained. Although vaporization of the metal does not persist for the sta-
Chapter 5
69
M
ble arc as the air becomes the main medium between the electrodes [8], the temperature at
the anode is at least 1083C, the melting temperature of copper, and at the cathode is at
least 1370 0 C, the melting temperature of steel, as metal at the two electrodes continues to
melt. Because of the non-uniform cross-sectional area of the arc, the current density is
significantly higher at the cathode than at the anode [9], resulting in a higher cathode temperature. Because a stable arc is sustained during 36V tests, considerable melting of the
electrodes results. This leads to two consequences affecting the tests run for this thesis,
the alteration of wire and blade shape, and the often welding between the blade and the
copper wire for 36V tests. Electrode melting in 12V tests did not reach the point of
deforming wire and blade shape, or cause more than infrequent welding of the contacts.
5.1.1 Alteration of wire and blade shape
Due to the melting of the electrodes, the copper wire and the steel blade become deformed
after each contact as shown in Figure 36.
FIGURE 36. Normal and deformed copper wire and steel blade due to melting of the electrodes.
Chapter 5
70
In Figure 37 is a picture of three 14AWG copper wires. On the left is a wire prior to testing. The middle wire has undergone 12V testing and the right-most wire has undergone
36V testing. Similarly arranged in Figure 38, three steel blades are shown. The left-most
blade has not undergone testing. The middle blade has undergone 12V testing and the
right-most has undergone 36V testing.
FIGURE 37. 14AWG test wires (from left): before testing, 12V testing, 36V testing.
FIGURE 38. Steel blades (from left): before testing, 12V testing, 36V testing.
71
Chapter 55
71
These pictures show that both the wire and the blade that have undergone 36V testing have
dramatically altered their shape from electrode melting. Black marks can be seen on wires
and blades having undergone 12V testing, but wire and blade shape have hardly changed.
One should also note the difference in the extent of insulation damage from the 12V tests
and 36V tests. A further discussion of this topic is presented in section 5.3.
As described in the previous chapter, the timing control method undertaken to achieve the
desired contact duration is followed under the assumption that during subsequent contacts,
the contacting members are not changed from their shapes during the first contact duration. With the shape of the wire and the blade changed from the initial contact, the contact
duration will no longer be that predicted by the first contact. However, we have observed
that the deviation is small and we believe it does not affect the qualitative and quantitative
results of these experiments.
5.1.2 Welding Effects
Another consequence of molten metal is that of welding between the wire and the blade.
This could result from material transfer during arcing. Another possible situation is that
when the blade strikes the bare wire, some copper and steel remain in their liquid phase
from the arc in the prior cycle because the electrodes did not have enough time to cool
down. Then, upon contact, the wire welds to the blade as the metals solidify. The author
only proposes these possible situations for consideration. We have no conclusive means to
identify the exact mechanism of welding. Whatever the mechanism that leads to welding,
the test results show that welding occurs for a significant number of cases developed for
Chapter 57
72
the test matrix. When welding occurs, retraction of the blade does not result in interruption of current, with the result that the fuse blows.
5.2 Test Matrix Results
The two effects of melting described above have affected the results of these experiments.
First, the duration does not remain constant as proposed for the 36V tests. However, this
does not affect the behavior of the arc that forms after the break of electrodes, since only
circuit voltage and resistance, and the speed of separation affect the duration of the arc, not
the peak current duration prior to arcing. Although the short-circuit duration does not
remain constant from contact to contact, the peak current does. Over a period of a ten-second test, the RMS current is calculated. Therefore, we are able to draw comparisons
between the maximum peak current and the measured peak current, and between the maximum RMS current and the measured RMS current. The comparison is made in Table 5
for 36V tests for TAC blade fuses at a chopper frequency of 1.1 Hz. Because of welding,
it is not possible to obtain RMS current values for several cases established in the test
matrix because the fuse faults before the ten-second test is over. When these instances
occur three times or more out of the five tests performed for each case, the "Measured
RMS Current" box is labeled "N/A." A closer look at these cases is presented in section
5.5. Nonetheless, tests show that intermittent stable 36V arcs can occur repetitively without blowing the fuse like unstable 12V arcs, but do not survive a ten second test (usually
due to welding) as frequently as 12V arcs.
73
Chapter
5
Chapter 5
73
The intended peak current duration is listed to help sort the different tests although the
actual tests vary around these values. Values listed in the tables constitute the average of
five tests run for each case listed in the test matrices developed in chapter 3. Table 6 lists
36V tests for Miniblade fuses at chopper frequency of 1.4Hz. Table 7 lists the measured
results of ATC blade 12V tests and Table 8 lists the measured results of Miniblade 12V
tests. Because 30A Miniblade samples were not available, it was not possible to perform
tests for this fuse rating. It should also be noted that no attempt at a statistical model is
made for this thesis research as the amount of data gathered is only sufficient for a preliminary analysis.
74
Chapter
Chapter 55
74
TABLE 5. 36V tests at 25*C with TAC fuses at T=900ms.
Fuse Rating
(Sustainable Current)
Intended
Current
Duration
Calculated
Peak
Current
Measured
Peak
Current
Calculated
RMS
Current
Measured
RMS
Current
1OA (12A)
10 ms
90 A
84 A
12 A
N/A
20
70
63
12
N/A
30
60
58
12
N/A
40
53
51
12
N/A
50
48
46
12
N/A
10 ms
150 A
115 A
21 A
N/A
20
117
99
21
N/A
30
100
90
21
N/A
40
88
82
21
14.9 A
50
80
74
21
N/A
10 ms
187 A
136 A
25 A
N/A
20
147
116
25
N/A
30
125
107
25
N/A
40
110
94
25
19.4 A
50
100
82
25
23.8 A
10 ms
247 A
174 A
33 A
N/A
20
194
140
33
26.7 A
30
165
137
33
27.5 A
40
145
118
33
27.8 A
50
132
114
33
26.7 A
10 ms
315 A
250 A
42 A
N/A
20
247
194
42
34.1 A
30
210
174
42
31.5 A
40
185
160
42
36.0 A
50
168
144
42
35.4 A
15A (21A)
20A (25A)
25A (33A)
30A (42A)
75
Chapter 55
75
TABLE 6. 36V tests at 25'C with Miniblade fuses at T=700ms.
Fuse Rating
(Sustainable Current)
Intended
Current
Duration
Maximum
Peak
Current
Measured
Peak
Current
Maximum
RMS
Current
Measured
RMS
Current
10A (13A)
10 Ms
73 A
64 A
13 A
N/A
20
59
57
13
N/A
30
52
51
13
N/A
40
47
46
13
12.3 A
50
43
42
13
N/A
10 Ms
138 A
106 A
21 A
N/A
20
109
97
21
N/A
30
93
81
21
N/A
40
82
74
21
N/A
50
74
64
21
14.2 A
10 Ms
169 A
120 A
27 A
N/A
20
133
106
27
18.8 A
30
114
93
27
18.4 A
40
101
89
27
N/A
50
93
87
27
N/A
10 Ms
229 A
175 A
35 A
N/A
20
179
136
35
25.2 A
30
152
118
35
20.3 A
40
134
112
35
23.9 A
50
122
99
35
18.8 A
15A (21A)
20A (27A)
25A (35A)
76
Chapter 55
76
TABLE 7. 12V tests at 25"C with ATC fuses.
Fuse Rating
(Sustainable Current)
Intended
Current
Duration
Maximum
Peak
Current
Measured
Peak
Current
Maximum
RMS
Current
Measured
RMS
Current
10A (12A)
10 Ms
113 A
95 A
12 A
9.3 A
20
80
79
12
10.0
30
65
58
12
11.5
40
56
54
12
11.2
50
50
47
12
11.1
10 Ms
189 A
161 A
21 A
14.5 A
20
134
120
21
14.5
30
109
108
21
18.5
40
94
84
21
16.9
50
84
82
21
18.8
10 Ms
237 A
183 A
25 A
18.5 A
20
167
144
25
18.0
30
136
105
25
23.4
40
118
94
25
18.6
50
106
93
25
23.2
10 Ms
313 A
270 A
33 A
25.3 A
20
221
191
33
28.7
30
180
168
33
27.6
40
156
142
33
27.5
50
140
117
33
27.2
10 Ms
398 A
331 A
42 A
37.2 A
20
281
245
42
37.6
30
230
222
42
37.5
40
199
180
42
36.4
50
178
152
42
34.5
15A (21A)
20A (25A)
25A (33A)
30A (42A)
77
Chapter 55
77
TABLE 8. 12V tests at 25"C with Miniblade fuses.
Fuse Rating
(Sustainable Current)
Intended
Current
Duration
Maximum
Peak
Current
Measured
Peak
Current
Maximum
RMS
Current
Measured
RMS
Current
10A (13A)
10 Ms
83 A
71 A
13 A
12.6 A
20
63
63
13
13.6
30
54
56
13
13.5
40
49
50
13
12.8
50
44
43
13
13.0
10 Ms
167 A
120 A
21 A
14.6 A
20
121
110
21
17.3
30
101
87
21
17.5
40
88
81
21
18.7
50
80
74
21
18.7
10 Ms
204 A
150 A
27 A
16.6 A
20
148
130
27
19.1
30
122
114
27
21.4
40
107
90
27
22.7
50
96
79
27
21.8
10 Ms
261 A
205 A
35 A
26.0 A
20
200
165
35
27.1
30
164
130
35
25.5
40
142
125
35
30.1
50
128
107
35
29.0
15A (21A)
20A (27A)
25A (35A)
Chapter 5
78
5.3 Observations and Analysis: Unstable vs. Stable Arcs
Observations were made for the 12V and 36V tests for the following: insulation state-hard or soft/breakable; copper wire state; welding; molten copper; smoke, flames, and fire;
and existence of stable arc as indicated by the current waveform. Fuse type had no effect
on the outcome. Comparisons of observations made for 12V and 36V tests are made in
Table 9.
It should be noted that for the same fuse rating and contact time the resistance in 36V tests
is triple that delivered in 12V tests, since current is kept nearly constant. This also triples
the dissipated power in the test wire. However the test matrices also include cases where
the circuit resistance for the 36V test is about 9 times the circuit resistance of a 12V test.
Such an example in Figures 16 and 20 for Miniblade fuses is R=48mEi (30A fuse, 20ms)
for the 12V test and R=439mQ (15A fuse, 40ms) for the 36V test. Under this condition
the power dissipated in the test wire is about the same for the 12V and 36V tests. Therefore, we believe the differences in the observed results are largely due to the effect of the
stable arc at 36V, which is absent in 12V systems, and not because of any power differences prior to arcing in the tests.
Chapter 5
79
TABLE 9. Qualitative description of frequency and extent of events observed for 12V and 36V
tests, where the circuit current is the same for 12V and 36V tests.
Event
stable arc
12V
never
36V
always
sustained fire
never
never
flames
never
sometimes
smoke
almost never
always
molten copper
almost never
always
welding
almost never
sometimes
copper wire state
small black marks
insulation state
unchanged
deformed, strands
cut within wire,
droplets leave wire
molten near bare
wire; soft, easily
penetrable
Although the table does not offer precise measurements, the reader can clearly see the relative difference between the results obtained for the two voltage sources. Qualitatively,
arcing in a system with a source of 36V has the potential to produce much more drastic
results than that in a 12V system, largely due to the existence of a stable arc at 36V. Of
particular note are metal droplets leaving the wire and blade in an eruptive manner, which
could lead to the ignition of loose fuel, and flames leading to the ignition of fuel vapors.
On the other hand, the possibility of a fire hazard is nothing new since 12V arcs could
ignite pre-mixed fuel vapor and air mixture. Although sparks, flames and metal droplets
were observed for some test cases, no ignition of any sort was seen in this experiment; any
flames which were observed extinguished themselves instantaneously. It should be noted
that this test made no attempt to assess the absolute or relative probability of igniting com-
Chapter 5
80
bustible materials other than the wire insulation. The back plane which held the wire electrode was a combustible plastic (NGMA grade G-10 high pressure laminate) oriented
vertically. Other than this, there was no combustible material in immediate proximity to
the wire. Another notable result of the heating of 36V arcs is the easily penetrable insulation near the contact area that could lead to increased exposure of the metal wire, which
increases the chances of further arcing and making undesirable contacts with other automobile components. Again, on the other hand, the increase of the area of bare wire
increases the probability of a hard short which could possibly lead to the clearing of the
fuse, and thus bringing the system into a safe state. Although 36V arcs are more hazardous for the high heat it generates, safety evaluations should not simply be based on the
likelihood of 36V arcs to cause fire, but the relative likelihood compared to 12V arcs with
all factors taken into account, including that of possible welding from 36V arcs that are
infrequent in 12V arcs. This specific topic will be discussed in section 5.5.
5.4 Quantitative Measurements and Analysis: Arc Energy
While qualitative observations provide some insight on the effect of arcing on wire damage and the surrounding environment, a quantitative analysis of arc energy provides a
more precise method of comparison between unstable 12V arcs and stable 36V arcs. An
equivalent circuit of arcing tests is shown in Figure 39. Because the L/R time constant for
the circuit is small compared to the duration of the stable arc, inductive effects can be
neglected.
Chapter 5
81
I
bat
R
L
VaLC
+Arc
____
__-
FIGURE 39. Equivalent circuit of arcing tests.
5.4.1 Arc Energy of Stable Arc
The current waveform of a stable arc can be modeled as a function of time, as in Figure 9
of chapter 3, and repeated here in Figure 40.
1(t')
kmax
tare
t
FIGURE 40. Arc current as a function of time for a stable arc.
Chapter 5
82
The energy in the arc can be determined by
~are2
parc
stable
Earc arc
aI(t')dt'-
0
bat
I
(t')Rdt'
(9)
0
where Vbat is the voltage source, tar, is the arc duration, and R is the resistance of the circuit. Values of tarc for the tests performed can be found from Figures (17) and (18) in
Chapter 3 for chopper periods of 700 ms and 900 ms, respectively. The current during tarc
can be expressed as a function of time.
I(t') = klmax(
(10)
-
where I,. = Vba/R. If k=0.5, then Equation 1 simplifies to
2
Vbatmax
stable
arc
arc
Imax Rtarc
6
6
(11)
5.4.2 Arc Energy of Unstable Arc
All the arc energy of an unstable arc essentially comes from the stored energy in the inductor
unstable
1
Earc
2
maLIx
(12)
where L is the inductance of the circuit shown in Figure 33. The inductance can be
approximated using the formula for wires [18] given by
L =
.
n(
n2l
1(r)
-
4-
(13)
where 1 is the length of the wire and r is the radius of the wire. In (13), both I and r have
units of [cm] and L has unit of [pH].
Chapter 5
83
5.4.3 Arc Energy Comparison
The graph in Figure 41 compares calculated arc energy between the stable arcs in the 36V
tests using tarc from Figure 18 and unstable arcs in the 12V tests from (11) and (12) for a
range of peak current from 50 amps to 250 amps, which is representative of cases in the
test matrix. Wires of 12 AWG of various lengths given in Figures (15) and (19) with a
chopper frequency of 1.1 Hz are assumed for this case. In Figure 42, a series of curves are
presented. Current is plotted against the arc energy ratio Estable/Eunstable for a range of
wire gauges. These graphs clearly show that the arc energy of the stable arc is about two
orders of magnitude greater than that of the unstable arc. Note that these results depend
on the speed with which the blade is withdrawn, which affects the duration of the stable
arc. These comparisons are therefore specific to our apparatus and methodology.
Arc Energy vs. Peak Current
10
102
-6
10
12V
U
100
10-1
102 L
50
100
150
Peak Current (A)
200
250
FIGURE 41. Calculated arc energy vs. peak current Im for 36V and 12V tests. Wire gauge = 12
AWG and chopper frequency = 1.1Hz (T=900ms).
Chapter 5
84
Energy Ratio vs. Peak Current
104
-
10
0 AWG
102
16 AWG
14 AWG
12 AWG
101
50
100
150
Peak Current (A)
200
250
FIGURE 42. Calculated arc energy ratio (stable/unstable) vs. peak current for a series of wire
gauges. Chopper frequency = 1.1 Hz (T=900ms).
5.5 Welding and Its Implications
Results from this research, as shown in Tables (3) and (4), indicate that 36V arcs cause the
electrodes to melt, which often leads to welding, because of the high energy heat generated in the arcs. This welding prevents the electrodes from separating, which results in the
uninterrupted flow of high short-circuit current until the fuse clears. This mechanism of
blowing the fuse can be interpreted as another way of bringing the system to a safe state.
In this section, using preliminary test results, we attempt at finding a pattern of conditions
that would cause welding.
85
Chapter
Chapter 55
85
5.5.1 Effect of peak current magnitude and duration
Preliminary results have shown that fault rates caused by welding increases with peak current magnitude due to the higher 12 R heating of the contacts at higher currents.
5.5.2 Effect of wire gauge
Data has shown that lower gauge wires (thicker wires) are less likely to weld than higher
gauge wires. This could possibly be because thicker wires are made up of thicker strands,
which need more heat to melt than thinner strands in thinner wires. Also, thicker wires are
more difficult to bend. This implies that there could be weak welding where very weak
bonds are formed between the electrodes, which the chopper could easily break away
without carrying the wire with it, whereas when thinner wires weld, it is a lot tougher for
the wire to maintain its position. The fuse clearing rate is defined as the number of clearings due to welding before the ten second test finishes, divided by the total number of tests
for a particular wire gauge (i.e. fuse rating). Fuse clearing rate vs. wire gauge for TAC
fuses is shown in Figure 43. The fuse clearing rate plotted against wire gauges for Miniblade fuse testing is shown in Figure 44.
86
Chapter
Chapter 55
86
I
0.8
0.6
L.
Q
0.4
0.2
0 1
1
12AWG
1
14AWG
16AWG
18AWG
20AWG
Gauge
FIGURE 43. Measured fuse clearing rate vs. wire gauge for 36V TAC tests.
I
cz
C4
Q
V
0.8
0.6
0.4
0.2
(I
14AWG
18AWG
16AWG
20AWG
Gauge
FIGURE 44. Measured fuse clearing rate vs. wire gauge for 36V Miniblade tests.
87
Chapter 55
87
5.5.3 Effect of separation speed
Although the separation speed could possibly have an effect on welding, the experiments
for this thesis are designed on the ability to analyze the arcs in these experiments as static
arcs. This implies a separation speed less than 20 cm/s as described in Chapter 2. Therefore, we did not expect to find significant differences between the effect of the two chopper frequencies used for the 36V tests on welding. Thus, the effect of chopper frequency
on fuse clearing rate is inconclusive from the data collected for this thesis research since
the range of chopper frequencies is confined to a relatively small range of periods, 700ms
to 900ms. However, it is conceivable that a chopper moving at a higher frequency, hence
faster, would be able to break welding contacts more easily than one moving at a slower
rate, leading to a higher fault rate, for a given peak current and wire gauge.
From these preliminary results, we find that welding frequently results from 36V arcs and
limits the possibility for the repetitive occurrence of intermittent arcing in a fused system.
This therefore implies that even though 36V arcs carry more energy and may be more
likely to cause fires than 12V arcs, the overall risk of fire and other hazardous effects over
an extended period of time for these two types of arcs needs additional extensive testing.
Although welding of wires could lead to the faulting of the fuse and therefore bring the
system into a safe state, it must be cautioned that this thesis does not view welding as a
help factor for all cases because some mechanisms such as relays and switches require that
they interrupt current. Welding counters this function as opposed to helping it. Therefore,
reliance on welding effects for safety must be carefully considered.
88
Chapter
Chapter 55
88
Chapter 6
Thesis Conclusions and Suggestions for Future Research
This thesis research investigated possible arcing hazards in 42V systems by testing recurring, intermittent arcs under conditions that are representative of what would be found in
an average automobile, including a fuse-protected system. To characterize situations of
having intermittent short circuits without blowing the fuse, a matrix of test parameters
such as short circuit current magnitudes, durations, and contact frequencies were found for
various fuse ratings. These matrix parameters were then used as a guideline to performing
tests using a mechanical chopper to create repetitive intermittent short circuits with subsequent arcing. Current measurements were made to verify that the conditions created do
not lead to the fuse blowing and qualitative and quantitative comparisons were made
between arcing in the 12-14V and 36-42V systems.
6.1 Conclusions
This thesis research was able to experimentally produce repetitive intermittent ground
faults followed by arcing without blowing the fuse for both 12V and 36V cases. The
effect of these arcs on wire damage and their possibility as a cause of fire was examined.
It is concluded that although sustained fires were not observed for cases investigated in
this thesis, individual 36V arcs are more capable of causing damage than individual 12V
arcs based on a comparison of events observed for each case as listed in Table 8 of chapter
5. Also, because the 36V arc is sustained, energy delivered to the arc is much greater than
Chapter 6
89
that of the unstable 12V arc as seen in Figure 41 of chapter 5. However, the occurrence of
repetitive 36V arcs is less in frequency and in number than that of 12V arcs because the
fuse blows as a result of current overload from the welding of electrodes from stable arcs.
Therefore the overall risk evaluation could possibly result in the two arcs having comparable possibility of causing fires since 12V arcs could also cause fire by igniting fuel vapor
and other similar mechanisms. This remains to be seen from more extensive testing of a
wide range of circuit parameters before any conclusive result can be reached.
From a safety point of view, welding is desired under shortings between wire and chassis
for instance. However, it may not be desired in relays, switches, and circuit breakers,
where an interruption of current is essential and therefore needs to be reliable. Therefore,
the effects of contact welding should be carefully evaluated in current-interrupting
devices.
6.2 Suggestions for Future Research
To obtain a better understanding of the likelihood of wire damage from repetitive arcing,
such as the cases observed in this thesis research, a statistical model should be developed.
This would entail a greater range of matrix parameters. The parameters of particular interest include wire gauge (including battery cables), peak current magnitude, and chopper
frequency--all of which we believe to have an effect on contact welding. This not only
yields a greater range of parameters but also provides a more accurate characterization of
contact welding events.
Chapter 6
90
The qualitative observations made in chapter 5 can be better explained by using advanced
analysis tools to investigate arc dynamics. A better understanding of arc dynamics could
lead to a solution in minimizing hazardous effects of arcing. For example, using high
speed photography, the mechanism of contact welding can be determined. Also, to characterize thermal distributions in the arc and electrodes, IR spectroscopy can be used, and
one can measure the rate of power dissipation from the arcing area for various peak current magnitudes. Perhaps at a higher contact frequency, the heat has less time to dissipate,
and may lead to the burning of insulation. It would be important to know under what circumstances and how likely this is to occur.
Lastly, it may prove prudent to create an even worse, but realistic, situation than that presented in this thesis that involves a test environment that represents exactly that of an automobile, which could include fuel vapors, or any other material, that could possibly start a
fire with proper ignition. One could then run tests for 12V and 36V arcs and make a statistical model predicting the likelihood of such events.
Chapter 6
91
Appendix
A1.1 Blade speed near contact
In this section, the blade speed near blade-wire contact is derived and it is shown that
experiments done in this thesis are under or near 20 cm/s and thus static arc characteristics
can be applied for analysis for most cases. In the mechanical chopper apparatus, a linear
sinusoidal motion is imparted to a push rod, which is constrained to move linearly by
guide bearings. The chopper blade is attached to the push rod through four springs. For
most of each cycle the blade moves with the push rod. When the blade contacts the test
wire, the blade motion stops and the springs allow the push rod to complete its cycle of
motion. The blade therefore is in contact with the wire for a finite amount of time T before
the blade parts. This derivation makes the assumption that when the blade parts from the
wire, it does not oscillate, but rather moves unidirectionally away. This is a reasonable
assumption since no vibrations caused by the springs that affected the test experiments
(see section 4.3) were observed during testing.
Figure 24 in chapter 4 illustrates the blade mechanism which converts motor rotation to
cyclic linear motion of the blade. There is a stub at R = 2.5cm on the motor-controlled
disk that moves in a circular path at a constant angular velocity and is responsible for converting the circular motion of the stub through a distance of 2nR to linear motion with
travel length 2R. The finite contact duration t allows us to achieve the short circuit contact
durations used in the test matrices. During time t, the disk shown in Figure 25 has turned
an angle a. In our derivation, however, we first assume t = 0, and thus a = 0; later, we will
take this additional factor into account. When 0 <0 <v7, the blade is advancing toward the
wire. When n < 0 < 2n, the blade pulls away from the wire. This is when arcing could
occur. Figure A1.1 shows the horizontal velocity vector component V, = -oR sin0,
where o is the constant angular velocity set by the PWM control of the motor.
92
Appendix
92
L
y
0)
0
x
R
V
J
V =oR
F
FIGURE A1.1. Horizontal velocity component of the turning disk, Vx=-wRsinO, resulting in linear
blade motion with maximum travel length 2R.
For our tests, the arc extinguishes at an angle 0 =
iT+
6, with 6 very small. In this time
24n2
interval with 8=wt, V, = wR8 =
2R t =
-
Rt. With control of the period, we can find
maT2
Vmax, the maximum velocity of electrode separation with an arc still present, which is
achieved at the moment just before the arc extinguishes at time t = tarcFor T = 700ms, the longest arc duration in the 36V Miniblade matrix is tarc = 65ms . For
T=900ms, the longest arc duration in the 36V TAC blade matrix is tarc = 80ms. Substituting these values into Vx=
(4c2 R)
2t-,
we obtain:
Vx(T=700ms) = 13.1 cm/s
Vx(T=900ms) = 9.7 cm/s
Now we look at the cases where we include the contact time T between the blade and the
bare wire. In the thesis experiments, the approximate range of T is from 50 to 100 ms for
T=900 ms and from 50 ms to 80ms for T=700 ms, mainly depending on wire gauge, the
mechanical chopper period, and the state of the deformed wire shape resulted from melting. Since only half of t happens when the blade is retracting from the wire and 0 > n, we
can assume that the time it takes from the initial point of retraction until the extinction of
the arc is t = t/2 + tarc.
Appendix
93
If t = 80 ms for T=700 ms and t = 100 ms for T=900 ms, then
V,(T=700) = 21.1 cm/s
Vx(T=900) = 15.8 cm/s
Although Vx(T=700) is slightly greater than 20 cm/s for the limiting case shown, several
approximations, which lead to over-estimations, should be noted. They mainly come from
the following two approximations. The first over-estimation comes from sin e < 0, especially as 0 is increased when we account for the additional W/2 from the contact duration.
With this approximation taken into account, as well as seeing that the cases presented here
are limiting cases and do not represent most of the cases in the test matrix, we believe it to
be valid to use static arc analysis to understand the behavior of arcs generated in this thesis
research.
94
Appendix
Appendix
94
A2.1 List of symbols
TABLE A2.1. List of symbols and their descriptions.
Symbol
AWG
D
DAQ
Im
Description
American Wire Gauge.
Duration of short-circuit prior to arcing.
Data Acquisition board.
Minimum stable arc current. Specific to anode material.
Imax
Peak current during short-circuit.
Irms
Root-mean-square (RMS) current value.
Isustain
k
Sustainable current of a fuse.
1
L
Lwire
Proportionality constant O<k<1, equal to (1-Vm/Vbat)Wire length.
Wire inductance.
Inductance of the circuit.
r
Rarc
Pulse Width Modulation.
Wire radius.
Magnitude of incremental resistance of stable arc, dVarc/dI
Ron
On-resistance of the MOSFET in the system circuit.
Rshunt
Resistance value of the shunt resistor. (Rshunt << Rwire)
Rwire
tarc
Resistance provided by the wiring in the circuit. This resistance dominates the resistance in the circuit.
Duration of stable arc.
T
Mechanical chopper period.
Va
Voltage drop across the anode layer of a stable arc.
Varc
Stable arc voltage.
Vbat
VC
Battery or source voltage.
Voltage drop across the cathode layer of a stable arc.
Vm
Minimum stable arc voltage. Specific to cathode material.
PWM
Appendix
95
A3.1 LabView Code
Page 1
TestControls.vi
A:\TestControls.vi
Last modified on 6/15/2001 at 4:23 AM
Printed on 6/15/2001 at 4:43 AM
Connector Pane
11*
TestControls.vi
Front Panel
Appendix
96
--- _j
Page 2
restControls.vi
A:\TestControls.vi
Last modified on 6/15/2001 at 4:23 AM
printed on 6/26/2001 at 11:23 PM
$lock Diagram
PWM period (s)
PWM pulse wid th (s)
UULJULIUUPULJLRUQ UL[LIWLJ
UUU UUUUUL
91
1 [0..2] *
c E c 0 0 0 0 c I I U t F
[ [ JDO CD 1o
Turn ON Motor
Start PWM
7-A II
Line
12000
B-
K
signal goes LOW when contact
In
INE
5-
detect contact
H- In
IL- IoLINEFEF
Nr
U U
2UL
00000OODEG~.0
no
LU
---
UU
LJUUL
-k"W
U
--
ULLUUULI[ULULUUUUULLLIU.LIUJUULktI.LPLL
LI
LL4JLJ
Li L
L
dLJA
Page 3
TestControls.vi
A:\TestControls.vi
Last modified on 6/15/2001 at 4:23 AM
4Printed on 6/26/2001 at 11:23 PM
1 [0..7]
start timer to see how long a contact without arc is
Kn
~ameon
L-n
U
I-o$n- O CDDOSCm
,.
O
an
n
0can
.Con LI: URU
Malc
Tr"Z=
LI LO
,1UL
.........I
signal goes HIGH when no contact
--------
LIGE
FET OFF
will call this time the maximum time of contact
.INE
max time of contact (1st contact)
11
[+*
I
L, LL"
Li& L.LI-AL
A
Page 4
festControls.vi
*
A:\TestControls.vi
tast modified on 6/15/2001 at 4:23 AM
printed on 6/26/2001 at 11:23 PM
3[0..7]
DIG
LINE
-ra
n nnrn
xmrrn
f
nfl n n
u
no
nm
nu
ntnn
n
74on
1C
0
I
0OO
0
L0
f
*
0 ElUu U.
50
T 07+07,u
U
4,
71UU
-
D0
J f.7-7-77
00 50O
A010
Page 5
festControls.vi
A:\TestControls.vi
Last modified on 6/15/2001 at 4:23 AM
printed on 6/26/2001 at 11:23 PM
DBin~e~ne DD ioanean
oid5 [0..]
M
DIG
LINE
1:3an eo~asnasa sn
a
-
0*3
o2
DI G
LINE
I+
max time of contact (2nd contact)
r+n
u
uusJ:
l.u uCu
uu6uruuuuuuuuuuuuuuuuusuzuuutuuutI
Auuu
Win
an
"
W"g
:1
I Cl VTfl fl P11
I-
Iturn ON FET for a duration of "contact duty" plus a few ms for arc to happen cleanly
DIG
FI-
I
LINE
1*1IME
L
10.00
+
r F -a- Z ,p
CjC10 3 j
aMM771 =Z'
100
1*1
1*1
t
oesf
El 0 110,11L,- 7a P C
ano noonnon
J1u1uC
I
detect contact ag ain
.......
..
...
............
____
FET OFF
"-rnon
ono
mann or
o
I
. max time of contact (2nd pulse)
--
LINE
DIG
i7
ont
- o -tai
im
7200 0120nOCQO 00 00 00 0000 001200 [100000
LINE
=
onoon
o n noanonoon
nono
onn
-- I
Page 6
festControls.vi
A:\TestControlsxvi
ast modified on 6/15/2001 at 4:23 AM
printed on 6/26/2001 at 11:23 PM
contact duration (m
DIE
FET OFF
I-,3 [0.3] 0O
LI NmE
zoFET OFF
tNE
:
I
I
F-I
;
V I I
-?477F'F7?'T7V'T -
I
:: I
it
X
:
t
V E F:4
7
[
0
.:I
t
:
I
.3]r.
.
.
fll
i:
:
."..
1:
.
.
I t
.
DIG
LINE
I
M+
ouuuuuouound
~~Fi
rn
rn
an Wceodcon
nonoo
ou
Page 7
festControls.vi
A:\TestControls.vi
Last modified on 6/15/2001 at 4:23 AM
printed on 6/26/2001 at 11:23 PM
U
UD
131L111
I..,
a n '? :
00..2] P:
I
R-W
LW40
FE OFF
Page 8
TestControls.vi
A:\TestControls.vi
Last modified on 6/15/2001 at 4:23 AM
printed on 6/26/2001 at 11:23 PM
2[O..2]
LINE
I
I
I
i
-
-~
-
Page 1
copeInterface.vi
:\ScopeInterface.vi
st modified on 6/22/2001 at 4:09 PM
frinted on 6/26/2001 at 11:24 PM
onnector Pane
Scope Channel to act as Tri...
Scope Channel For High Side...
Test Duration ScopeInterface.vi
Iront
Panel
Page 2
copelnterface.vi
\ScopeInterface.vi
st modified on 6/22/2001 at 4:09 PM
rinted on 6/26/2001 at 11:24 PM
lock Diagram
Bandwidt
ited?
2.
itj;i-H
f
True
Scope Channel For High Side of Shunt]
Scale Data
1 0.05t~
Scope Channel For Low Side of Shunt
Address for
HSD
SCOPE
35 [0.351
fLowSD,
scalefactorl
new file path (Not A Path if cancelled)
Scope Channel to act as Trigger
file
so
path (d
if empty)
d-rt
Test Duration
20
?n
:
1
E taPoints
2
Data Wavef rm RMVS
umbe
S
number copy
x
-
PLetrD
It
rcult Resistance
?'hjt.
l - +l
ppnd to filenwflF
........... _
I
Channel Offset in Divisions
False
n rn
U
UNLOCK ALL
-
M
..
a1
Page 3
Scopelnterface.vi
A: \ScopeInterface.vi
Last modified on 6/22/2001 at 4:09 PM
printed on 6/26/2001 at 11:24 PM
ononm~noermnon
iI
TAI
LE.iULL
IL
IL
j~iI
ILl
iL
IIt~
iA
n
I1[.5
1 [0..35]
HORIZONTAL: RECORDLENGTH
........
rOILImu
ASI L mALIL
LIA
IAL
Iosmn W.
Iao n
'1n
2 [0j.5
1Here we turn off all of the scope channelsI
GPIB Write
s.E.L.E.CT:C.H
OFF.;:.SE.L.E.CT,:C.H2 OFF;.:.S.EL.ECT.:.CH.3 OrFrF;.:.S.EL.ECT.:CH 4.OFF
n n n
n 3[C..35]
3I [0..35]j
PLI
IHere we start to set up the scope channel that we are going to be using as the trigger
CH
COPLING DCJ
r'VM,fT Irl"flrida"....M.... - TT.U.
*fjrM.q-j.-Zy[In.14.: :.1,rr
.. .
U,
Page 4
ScopeInterface.vi
A:\ScopeInterface.vi
.ast modified on 6/22/2001 at 4:09 PM
printed on 6/26/2001 at 11:24 PM
"isononstennno
nnoono
eno
C
onn rl
ad
-
4 [O..35]
[Here we set the trigger channel's position to zero volts
POSITION 0
rnnrnnn
nnnnmnn namn nnn
nnn
nmnannn
k mnn-nnnrn nn nnnnnnicinnnnn
Here we set the trigger channel to 1 volt/ division]
CH
C3+
M M
VOLTS
timarryn
1
L 1, UT14.u U U.,
F
wHtre
we turn
0
-
6 [0..35]
on the channel that we are goi ng to use to collect the high side shunt data
* ACQUIRE:STATE STOP
[EsLECT:CH
I
caN
I
n ncn
no
ci?
Page 5
Scopelnterface.vi
A:\ScopeInterface.vi
Last modified on 6/22/2001 at 4:09 PM
printed on 6/26/2001 at 11:24 PM
7 0.35
SELECT:CH,
U-
a
O-N
,I
1 I8
[..35]
9
:GERMAIN:TYPE LOGIC:
0..35]
090L
Page 6
ScopeInterface.vi
A: \ScopeInterface.vi
Last modified on 6/22/2001 at 4:09 PM
printed on 6/26/2001 at 11:24 PM
10 0.3 5
TRGE:ANLOGIC: CLASS PATTERN
nnnnrt nnnn
n
a
3L
IIR .................
GGER: M.IN: LOGIC.
FUNC
-..............
I
I
12 0.351Q
LTIGGER: MAIN: LOGIC: INPUT:CH 1 X
ci
Page 7
ScopeInterface.vi
A:\ScopeInterface.vi
Last modified on 6/22/2001 at 4:09 PM
Printed on 6/26/2001 at 11:24 PM
prmann~rm nnanonna oconmanaoonnnnn
I In
mZr
61 EVEM-l'o-, 0o
n
n
on
n
n
oo
o
[TRIGGER: MAIN: LOGIC:INPUT:CH2 X
s:42
Ev+
9:.2
e 532
re:
1+:+.*:::1
a:;ps
re:i
r.:o:
r.::a
r:s:a
m:.r
or liian
was
1-i
::+
fl
e.R
. ::-r::.:, ss* a ssrra s-:::st:.n m~n
14 [0..35])
IGGE9RMAImioGI:INPUT
e o
n
rann
na o n
CH3
n nn
nn a t~o o o a ao 915 [0..351Mnm
1L
TiGGER MAIN:LOGIC:INPUT:CH4 X
.0
.
15
6..
0
mnnooonnoann
:.,:: 1.111
Page 8
ScopeInterface.vi
A: \ScopeInterface.vi
Last modified on 6/22/2001 at 4:09 PM
printed on 6/26/2001 at 11:24 PM
ujin
rnan
on
nna pon
uns
u c nn
p
nnannonnananananonne
n=
S16
RIGGERAIN LOGIC: INPUT:CH
LOW
U
TRIGGER:MAIN:LOGIC: WHEN TRUE
r20.o
DUE
=020:0139011
18
0 .35]
donnoD
D<Dflt DODD DttD
IGGER:AIN:LOGIC:THRESHOLD:CH
I
Uc5
rl..
fjsfj
T.7m jrT..j n.
DDDflCD 000000
DOD
Ebl W II IN-MII=
l iltil1
-T
't
.-
"
" .
---
'
-I
||||||||| |||||@||||
Page 9
ScopeInterface.vi
A: \Scopelnterface.vi
Last modified on 6/22/2001 at 4:09 PM
Printed on 6/26/2001 at 11:24 PM
enfDXCEI
n z6LM M:.
al,
10r
Li
ACQUIRE:REPET OFF
;
oan ann
n
Ell
n on nol
In! p nnn n
k~
~flO9~
2O[O.35]~j~
~~~~
ACQUIRE:STOPAFTER SEQUENCE
Lrm
Li
-,e
a
21 Q..35,
Horizontai:main:scale
PARSEVI
s]
----
M
TTFY1
nen ~~~~~
~nnnanm
Page 10
ScopeInterface.vi
A: \ScopeInterface.vi
Last modified on 6/22/2001 at 4:09 PM
Printed on 6/26/2001 at 11:24 PM
4
POSITION
}.
0
------------
LHO
C24
rW
a'!
.0..35
23035-
[i
i>*
op
t
v
Page 11
ScopeInterface.vi
A: \ScopeInterface.vi
Last modified on 6/22/2001 at 4:09 PM
Printed on 6/26/2001 at 11:24 PM
25 [O..35]
CH
-
a--"s" ---*a"
--o-
o
PARSEVI
VOLTS
..
LULI H U
UHULA
UU
U
U1-
SJ
u
Hf
U
LIHU2,
-u
IULu
1
U
F-non n n n nrmn non non n Fn-nn nn nn n an n n
U
HU
Uu
nnnnn nn
,-
Ui
L
U U
UUILUU
U
U
U
LIULIHU
nnnnnn
nnnrn1nnn:nnnnnnnnnnnnno
U-HtU
IU LI,
H
n
nn
C+
:VOLTS
PARSE.I
INR
T
I
rmj
n
'Arl
.- - I ILA 1::l :. I
True
CHiBANDWIDTHTWENTYi
nnasnagpe annnannnn ninennan nennonninUnn
istasoamnenpgenneonn
n
sr-hcl:n..+nno[
naccn,n
Page 12
ScopeInterface.vi
A:\ScopeInterface.vi
Last modified on 6/22/2001 at 4:09 PM
Printed on 6/26/2001 at 11:24 PM
False
?I
S28
True
WIDTH TW
LO..35) .Jflflflfl~flflflpflflfltfpnnmflnpnnnn
M
r
TY
jFaise
0
0729
[0..35]
C3LC12
True-
......................
....
.....
>
CH3:BANDWIDTH TWENTY:
m
Falsee
Page 13
ScopeInterface.vi
2 A:\ScopeInterface.vi
Last modified on 6/22/2001 at 4:09 PM
#Printed on 6/26/2001 at 11:24 PM
~Truer
CH4:BANDWIDTH
False
K
?.
itt
at
~
tOtt
tOOt
Oh t t t LEO O
ACQUIRE:STATE RUN
IK-licl **.Mi O :O i Di:O m 0 ",D: El
OtIntsfl
us
31 [0..35]
K K
K
.
Km
Page 14
ScopeInterface.vi
A:\ScopeInterface.vi
Last modified on 6/22/2001 at 4:09 PM
iPrinted on 6/26/2001 at 11:24 PM
j
32 [0.3]
I
I
Get Data from Scope
......
33~
3
.,
T rans
ft
are .transfering the High Side of the Shunt Data
....... ............ ....................................
Goo~o~nau
DO~po~ggeat~oD~oDO
myonnnkreras
-.
DC~sO
r
fe
DOUzU::U, UU:EFU L! U,.Ul
UUGUDC
34[0..35]
I
IHere we are transfering the Low Side of the Shunt Data I
I
I
a:rz0101
Bibliography
[1]
J. G. Kassakian, "Automotive Electrical Systems -- The Power Electronics Market
of the Future," Proceedingsof the IEEE Applied Power Electronics Conference
and Exposition (APEC 2000), vol. 1, pp. 3 - 9, New Orleans, LA, February 2000.
[2]
J. M. Miller, D. Goel, D. Kaminski, H. P. Schoner and T.M. Jahns, "Making the
Case for a Next Generation Automotive Electrical System," International Congress on TransportationElectronics(Convergence '98), pp. 41 - 51, Dearborn, MI,
October 1988.
[3]
T. J. Schoepf and W. F. Rieder, "Consequences for Automotive Relays of a 42
VDC Power Network in Vehicles," IEEE Transactionson Components and Packaging Technologies, vol. 23, pp. 177 - 182, March 2000.
[4]
J. C. Byrum, ComparativeEvaluation of Dual-Voltage Automotive Alternators,
M.Eng. Thesis, Massachusetts Institute of Technology, Department of Electrical
Engineering and Computer Science, September 2000.
[5]
T. Morgan, "42-Volt Challenges: Arcs and Sparks," Automotive News, March 12,
2001.
[6]
R. Holm, Electric Contacts: Theory andApplication, 4th ed. New York: SpringerVerlag, Inc., 1967.
[7]
J. M. Somerville, The ElectricArc, New York: John Wiley & Sons, Inc., 1959.
[8]
Z.-K. Chen and K. Sawa, "Effect of Arc Behavior on Material Transfer: A
Review," Proceedingsof the Forty-SecondIEEE Holm Conference on Electrical
Contacts, pp. 238 - 251, September, 1996.
[9]
T. E. Browne, CircuitInterruption:Theory and Techniques, New York: Marcel
Dekker, Inc., 1984.
[10]
J. D. Cobine, Gaseous Conductors: Theory and EngineeringApplications, New
York: McGraw-Hill Book Company, 1941.
[11]
M. Zahn, "Solid, Liquid, and Gaseous Electrical Insulation," Encyclopedia of
Applied Physics, vol. 18, pp. 431 - 466, VCTT Publishers, Inc., 1997.
[12]
SAB Handbook, 2000. SAE InternationalStandards Development Program, Volume 2. Partsand Components and On-Highway Vehicles, Warrendale: Society of
Automotive Engineers, Inc., 2000.
[13]
Pudenz, The Impact of 42V System on Fuses. <www.pudenz.com>
[14]
Cooper-Bussmann, Fuse Technology. <www.bussmann.com>
Bibliography
97
[15]
Littelfuse, CircuitProtection Technologies. <www.littelfuse.com>
[16]
I. Jergovic, Protectionand Fusing in Advanced Automotive ElectricalEnvironment, M. Eng. Thesis, Massachusetts Institute of Technology, Department of Electrical Engineering and Computer Science, May 2000.
[17]
ASTM Committee B-1, ASTM Standardson Metallic ElectricalConductors, Baltimore: American Society for Testing and Materials, 1962.
[18]
F. W. Grover, Inductance Calculations:Working Formulas and Tables, New York:
Dover Publications, Inc., 1946.
[19]
A. Wright and P.G. Newbery, Electric Fuses, Stevenage: Peter Peregrinus Ltd.,
1982.
98
Bibliography
Bibliography
98