Electronic Journal of Differential Equations, Vol. 2015 (2015), No. 111,... ISSN: 1072-6691. URL: or
advertisement
, No. 111,... ISSN: 1072-6691. URL: or")
Electronic Journal of Differential Equations, Vol. 2015 (2015), No. 111, pp. 1–27.
ISSN: 1072-6691. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu
ftp ejde.math.txstate.edu
LIMIT CYCLES FROM A CUBIC REVERSIBLE SYSTEM VIA
THE THIRD-ORDER AVERAGING METHOD
LINPING PENG, ZHAOSHENG FENG
Abstract. This article concerns the bifurcation of limit cycles from a cubic
integrable and non-Hamiltonian system. By using the averaging theory of
the first and second orders, we show that under any small cubic homogeneous
perturbation, at most two limit cycles bifurcate from the period annulus of the
unperturbed system, and this upper bound is sharp. By using the averaging
theory of the third order, we show that two is also the maximal number of
limit cycles emerging from the period annulus of the unperturbed system.
1. Introduction
The Hilbert 16th problem proposes to find the maximal number of limit cycles of
planar real polynomial differential equations ẋ = f (x, y), ẏ = g(x, y) in terms of the
degree n of the polynomials f and g [17]. This is a longstanding problem, and many
interesting and profound results have been established under various conditions. For
example, the bifurcation of limit cycles from the periodic orbits around a center has
been extensively studied in the literatures [7, 11, 12, 18, 20, 21, 22] and the references
therein. The weak Hilbert 16th problem in the quadratic Hamiltonian case was
studied in [7]. Simultaneously, quite a few innovative methods have been proposed
based on the Poincaré map [6, 10, 19], the Poincaré-Pontryagin-Melnikov integrals
or the Abelian integrals [1, 2, 9, 24], the inverse integrating factor [13, 14, 15, 23],
and the averaging method [3, 8, 16, 20, 21, 22] which is actually equivalent to the
Abelian integrals in the plane.
Although in the plane the method of Abelian integrals and the averaging theory
are essentially equivalent, each has its own advantages. For example, when the associated Abelian integrals are complicated or we need to study the periodic orbits
of the non-autonomous differential systems, the averaging method displays more
flexibility. Roughly speaking, the averaging method gives a quantitative relation
between the solutions of a non-autonomous periodic differential system and the
solutions of its averaged differential equation, which is autonomous. Therefore, for
some differential systems, the number of hyperbolic equilibrium points of their averaged differential equations can give a lower bound of the maximal number of limit
2010 Mathematics Subject Classification. 34C07, 37G15, 34C05.
Key words and phrases. Bifurcation; limit cycles;homogeneous perturbation;
averaging method; cubic center; period annulus.
c
2015
Texas State University - San Marcos.
Submitted January 12, 2015. Published April 22, 2015.
1
2
L. PENG, Z. FENG
EJDE-2015/111
cycles emerging from the periodic orbits around the center of the corresponding
unperturbed system.
As mentioned above, by using the averaging theory, the problem regarding the
number of limit cycles of some differential systems can be reduced to the exploration of the number of hyperbolic equilibrium points of their averaged differential
equations. Hence, the averaging theory has played a crucial role in the study of
limit cycles of the differential systems and some elegant results on the number of
limit cycles of the differential systems have been obtained, such as by Buică and
Llibre [5], by Gine and Llibre [16], by Li and Llibre [20] and so on. However, it
appears that these well-known results are focused on the first and second order
bifurcations of limit cycles. As far as we know, analyzing the third order averaged
function is generally very complicated, cumbersome and challenging, and even be
out of the reach with the present stage of knowledge. Motivated by this fact and
reference [3], in this paper we use the averaging theory of the first, second and third
orders to study the bifurcation of limit cycles from the following cubic integrable
and non-Hamiltonian system under any small cubic homogeneous perturbations
ẋ = −y + x2 y,
(1.1)
ẏ = x + xy 2 ,
which has
x2 + y 2
=h
1 − x2
as its first integral with the integrating factor 2/(1 − x2 )2 , and has the unique finite
singularity (0, 0) as its isochronous center. The period annulus, denoted by
H(x, y) =
{(x, y)|H(x, y) = h,
h ∈ (0, +∞)}
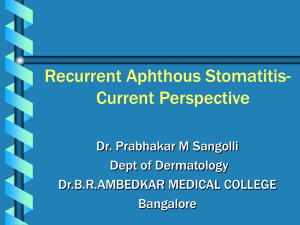
starts at the center (0, 0) and terminates at the unbounded separatrix formed by
two invariant lines x = ±1 and the infinite degenerate singularities on the equator.
The phase portrait of system (1.1) is shown in Figure 1.
We summarize our main results as follows.
Theorem 1.1. For any sufficiently small parameter |ε|, and any real constants
(k)
(k)
aij and bij (i, j = 0, 1, 2, 3; k = 1, 2, 3), consider the following cubic homogeneous
perturbation of system (1.1)
ẋ = −y + x2 y +
3
X
εk
2
ẏ = x + xy +
k=1
aij xi y j ,
i+j=3
k=1
3
X
(k)
X
k
ε
X
(1.2)
(k)
bij xi y j .
i+j=3
Then the following two statements hold.
(1) By using the averaging theory of first and second orders, system (1.2) has at
most two limit cycles bifurcating from the period annulus around the center
(0, 0) of the unperturbed one, and in each case this upper bound is sharp.
(1)
(2) By using the averaging theory of third order, system (1.2) with b03 being
zero has at most two limit cycles bifurcating from the period annulus around
the center (0, 0) of the unperturbed one, and this upper bound is sharp.
EJDE-2015/111
LIMIT CYCLES FROM A CUBIC REVERSIBLE SYSTEM
3
Figure 1. Phase portrait of system (1.1) in the Poincaré disk.
The rest of this paper is organized as follows. In Section 2, we give an introduction on the averaging theory of first, second and third orders, including some
technical lemmas and methods employed in the averaging theory. Sections 3, 4 and
5 are dedicated to the study of the bifurcation of limit cycles by computing the
first, second and third order averaged functions related to the equivalent system
of system (1.2) and exploring the number of theirs simple zeros, respectively. In
addition, some examples are given to illustrate the established results.
2. Preliminary results
In this section, we briefly introduce the averaging theory of first, second and
third orders, and some technical lemmas which will be used in the proof of our
main results.
Lemma 2.1 ([3]). Consider the differential system
ẋ(t) = εF1 (t, x) + ε2 F2 (t, x) + ε3 F3 (t, x) + ε4 W (t, x, ε),
(2.1)
where F1 , F2 , F3 : R × D → R, W : R × D × (−ε0 , ε0 ) → R (ε0 > 0) are continuous
functions and T - periodic in the first variable, and D is an open subset of R. Assume
that the following hypotheses (i) and (ii) hold.
(i) F1 (t, ·) ∈ C 2 (D), F2 (t, ·) ∈ C 1 (D) for all t ∈ R, F1 , F2 , F3 , W, Dx2 F1 , Dx F2 are
locally Lipschitz with respect to x, and W is twice differentiable with respect to ε.
Define Fk0 : D → R for k = 1, 2, 3 as
Z
1 T
F1 (s, x)ds,
F10 (x) =
T 0
Z
1 T ∂F1 (s, x)
0
F2 (x) =
y1 (s, x) + F2 (s, x) ds,
T 0
∂x
4
L. PENG, Z. FENG
F30 (x) =
EJDE-2015/111
T
h 1 ∂ 2 F (s, x)
1 ∂F1 (s, x)
1
y12 (s, x) +
y2 (s, x)
2
2
∂x
2
∂x
0
i
∂F2 (s, x)
+
y1 (s, x) + F3 (s, x) ds,
∂x
1
T
Z
where
Z s
F1 (t, x)dt,
y1 (s, x) =
0
Z s
∂F1 (t, x)
y2 (s, x) = 2
y1 (t, x) + F2 (t, x) dt.
∂x
0
(ii) For an open and bounded set V ⊂ D and for each ε ∈ (−ε0 , ε0 )\{0}, there
exists a ∈ V such that (F10 + εF20 + ε2 F30 )(a) = 0 and
d(F10 + εF20 + ε2 F30 )(a)
6= 0.
dx
Then for sufficiently small |ε| > 0, there exists a T -periodic solution x(t, ε) of
system (2.1) such that x(0, ε) → a as ε → 0.
Corollary 2.2 ([3]). Under the hypotheses of Lemma 2.1, if F10 (x) is not identically
zero, then the zeros of (F10 + εF20 + ε2 F30 )(x) are mainly the zeros of F10 (x) for
sufficiently small |ε|. In this case, conclusions in Lemma 2.1 are true.
If F10 (x) is identically zero and F20 (x) is not identically zero, then the zeros of
0
(F1 + εF20 + ε2 F30 )(x) are mainly the zeros of F20 (x) for sufficiently small |ε|. In
this case, conclusions in Lemma 2.1 are true.
If F10 (x) and F20 (x) are identically zero and F30 (x) is not identically zero, then
(0)
the zeros of (F10 + εF20 + ε2 F30 )(x) are mainly the zeros of F3 (x) for sufficiently
small |ε|. In this case, conclusions in Lemma 2.1 are true too.
Remark 2.3. To be convenient, we call the functions Fk0 (x) (k = 1, 2, 3), defined
in Lemma 2.1, the first, second and third averaged functions associated with system
(2.1), respectively.
Consider a planar integrable system of the form
ẋ = P (x, y),
ẏ = Q(x, y),
(2.2)
where P (x, y), Q(x, y) : R2 → R are such continuous functions that (2.2) has a first
integral H with the integrating factor µ(x, y) 6= 0, and has a continuous family of
ovals
{γh } ⊂ {(x, y)|H(x, y) = h, hc < h < hs },
around the center (0, 0). Here hc is the critical level of H(x, y) corresponding to
the center (0, 0) and hs denotes the value of H(x, y) for which the period annulus
terminates at a separatrix polycycle. Without loss of generality, assume hs > hc ≥
0. We perturb this system as follows
ẋ = P (x, y) + εp(x, y, ε),
ẏ = Q(x, y) + εq(x, y, ε),
(2.3)
where ε is a small parameter and p(x, y, ε), q(x, y, ε) : R2 × R → R are continuous
functions. In order to study the number of limit cycles for sufficiently small |ε| by
using the above averaging theory, we first need to transform system (2.3) into the
EJDE-2015/111
LIMIT CYCLES FROM A CUBIC REVERSIBLE SYSTEM
5
canonical form described in Lemma 2.1. The following result developed from [4]
provides a way for such transformations.
Lemma 2.4 ([4]). For system (2.2), assume xQ(x, y)
√ (x, y) 6= 0 for all (x, y)
√ − yP
in the period annulus formed by the ovals γh . Let ρ : ( hc , hs )×[0, 2π) → [0, +∞)
be a continuous function such that
H(ρ(R, ϕ) cos ϕ, ρ(R, ϕ) sin ϕ) = R2
√ √
for all R ∈ ( hc , hs ) and ϕ ∈ [0, 2π). Then the differential
√ equation which
describes the dependence between the square root of energy R = h and the angle
ϕ for system (2.3) is
dR
µ(x2 + y 2 )(Qp − P q)
,
=ε
dϕ
2R(Qx − P y) + 2Rε(qx − py) x=ρ(R,ϕ) cos ϕ, y=ρ(R,ϕ) sin ϕ
which is equivalent to
dR n µ(x2 + y 2 )(Qp − P q)
µ(x2 + y 2 )(Qp − P q)(qx − py)
= ε
− ε2
dϕ
2R(Qx − P y)
2R(Qx − P y)2
2
2
2 o
µ(x + y )(Qp − P q)(qx − py) + ε3
+ O(ε4 ),
2R(Qx − P y)3
x=ρ(R,ϕ) cos ϕ, y=ρ(R,ϕ) sin ϕ
where P, Q, p and q are defined as before.
Remark 2.5. It is notable that for the integrable and non-Hamiltonian systems,
in general it is difficult to find the suitable transformations as described in Lemma
2.4.
For
x2 + y 2
,
1 − x2
we choose the function ρ = ρ(R, ϕ) as follows
H(x, y) =
ρ(R, ϕ) = p
R
1 + R2 cos2 ϕ
(2.4)
such that
H(ρ(R, ϕ) cos ϕ, ρ(R, ϕ) sin ϕ) = R2 .
Applying Lemma 2.4 to system (1.2), we obtain the following result.
Lemma 2.6. In the transformation x = ρ(R, ϕ) cos ϕ and y = ρ(R, ϕ) sin ϕ for
ϕ ∈ [0, 2π), system (1.2) can be reduced to
dR
(1 + R2 cos2 ϕ)2 n
=
ε(Qp1 − P q1 )
dϕ
R
h
(Qp1 − P q1 )(xq1 − yp1 ) i
+ ε2 Qp2 − P q2 −
x2 + y 2
h
(Qp1 − P q1 )(xq2 − yp2 ) + (Qp2 − P q2 )(xq1 − yp1 )
+ ε3 Qp3 − P q3 −
x2 + y 2
2 io
(Qp1 − P q1 )(xq1 − yp1 )
+ O(ε4 ),
+
(x2 + y 2 )2
x=ρ(R,ϕ) cos ϕ, y=ρ(R,ϕ) sin ϕ
(2.5)
6
L. PENG, Z. FENG
EJDE-2015/111
where
(k)
(k)
(k)
(k)
(k)
Qpk − P qk = a30 x4 + a21 + b30 x3 y + a12 + b21 x2 y 2
(k)
(k)
(k)
(k)
(k)
(k)
+ a03 + b12 xy 3 + b03 y 4 − b30 x5 y + a30 − b21 x4 y 2
(k)
(k)
(k)
(k)
(k)
+ a21 − b12 x3 y 3 + a12 − b03 x2 y 4 + a03 xy 5 ,
(k)
(k)
(k)
(k)
(k)
xqk − ypk = b30 x4 + b21 − a30 x3 y + b12 − a21 x2 y 2
(k)
(k)
(k)
+ b03 − a12 xy 3 − a03 y 4 ,
(k)
(2.6)
(k)
and aij and bij i, j = 0, 1, 2, 3; k = 1, 2, 3 are real, and ρ(R, ϕ) is given by (2.4).
3. Zeros of first order averaged functions
Proposition 3.1. The first order averaged function associated with system (2.5)
has at most two simple zeros, and this upper bound can be reached.
Proof. The first order averaged equation corresponding to system (2.5) is
Ṙ = εF10 (R),
(3.1)
where
F10 (R)
2π
(1 + R2 cos2 ϕ)2 Qp1 − P q1 dϕ
R
x=ρ cos ϕ, y=ρ sin ϕ
0
Z 2π n h
i
1
(1)
(1)
(1)
(1)
R3 a30 cos4 ϕ + a12 + b21 cos2 ϕ sin2 ϕ + b03 sin4 ϕ
=
2π 0
(3.2)
h
R5
(1)
(1)
2
4
a30 − b21 cos ϕ sin ϕ
+
1 + R2 cos2 ϕ
io
(1)
(1)
+ a12 − b03 cos2 ϕ sin4 ϕ dϕ.
1
=
2π
Z
A straightforward calculation gives
Z 2π
1
cos4 ϕ sin2 ϕ
dϕ = π
−
2
2
1 + R cos ϕ
4R2
0
Z 2π
3
cos2 ϕ sin4 ϕ
dϕ = π
+
2
2
1 + R cos ϕ
4R2
0
i
1
2
2
2 1
√
−
+
+
,
R4
R6
R4
R6
1 + R2
3
2
2
4
2 1
+ 6−
+ 4+ 6 √
.
4
2
2
R
R
R
R
R
1+R
Substituting the above formulas in (3.2), we find
1 n (1)
(1)
(1)
(1)
(1)
(1)
F10 (R) =
a30 + a12 R4 + − a30 + 3a12 + b21 − 3b03 R2
2R
h
(1)
(1)
(1)
(1)
(1)
(1)
+ 2 − a30 + a12 + b21 − b03 + − 2 a12 − b03 R4
(1)
(1)
(1)
(1)
+ 2 a30 − 2a12 − b21 + 2b03 R2
i
o
1
(1)
(1)
(1)
(1)
+ 2 a30 − a12 − b21 + b03 √
.
1 + R2
√
Recall that 1 + R2 > 1, and let
p
1 + w2
1 + R2 =
1 − w2
(3.3)
EJDE-2015/111
LIMIT CYCLES FROM A CUBIC REVERSIBLE SYSTEM
for 0 < w < 1. Then formula (3.3) becomes
h
w3
(1)
(1)
(1)
(1)
F10 (R) =
− a30 + a12 + b21 − b03 w4
2
3
(1 − w )
i
(1)
(1)
(1)
(1)
(1)
(1)
(1)
(1)
+ 2 a30 + a12 − b21 − b03 w2 + 3a30 + a12 + b21 + 3b03 ,
7
(3.4)
which indicates that F10 (R) has at most two zeros in w ∈ (0, 1), in other words,
at most two zeros in R ∈ (0, +∞), by taking into account the multiplicity. Note
that there exist some systems whose first order averaged functions have exactly two
simple zeros. We here present an example as follows. Consider a family of systems
i
h
9 3
13 2
(1)
(1)
(1)
(1)
x + a21 x2 y + b03 +
xy + a03 y 3 ,
ẋ = −y + x2 y + ε − b03 −
40
40
(3.5)
h
i
9 2
(1) 3
(1)
(1)
(1)
2
ẏ = x + xy + ε b30 x + − b03 +
x y + b12 xy 2 + b03 y 3 ,
20
(1)
(1)
(1)
(1)
(1)
where a21 , a03 , b30 , b12 and b03 are real. In the polar coordinates x = ρ(R, ϕ) cos ϕ
and y = ρ(R, ϕ) sin ϕ, system (3.5) can be rewritten as
dR
= εG(R, ϕ) + O(ε2 ),
dϕ
(3.6)
where
h
9
31
(1)
(1) (1)
cos4 ϕ + a21 + b30 cos3 ϕ sin ϕ +
cos2 ϕ sin2 ϕ
G(R, ϕ) = R3 − b03 −
40
40
i
(1)
(1)
(1)
+ a03 + b12 cos ϕ sin3 ϕ + b03 sin4 ϕ
h
R5
27
(1)
+
cos4 ϕ sin2 ϕ
− b30 cos5 ϕ sin ϕ −
2
2
1 + R cos ϕ
40
i
13
(1)
(1)
(1)
+ a21 − b12 cos3 ϕ sin3 ϕ +
cos2 ϕ sin4 ϕ + a03 cos ϕ sin5 ϕ .
40
So the first order averaged equation of system (3.6) is
dR
= εG01 (R),
dϕ
where
Z 2π
1
G1 (R, ϕ)dϕ
2π 0
Z
h 27 Z 2π cos4 ϕ sin2 ϕ
io
1 n R3
13 2π cos2 ϕ sin4 ϕ
5
=
+R −
dϕ
+
dϕ
2 40
40 0 1 + R2 cos2 ϕ
40 0 1 + R2 cos2 ϕ
i
1 h 4
1
=
2R + 33R2 + 40 + (−13R4 − 53R2 − 40) √
40R
1 + R2
w3
1
1
=
w−
w− ,
2
3
(1 − w )
2
5
G01 (R) =
where R and w are defined as before. Apparently, G01 (R) has exactly two positive
zeros, denoted by
4
5
(1)
(1)
R1 = , R2 =
,
3
12
8
L. PENG, Z. FENG
(1)
corresponding to w1
over, we have
(1)
= 1/2 and w2
(1) dG01 R1
dR
This completes the proof.
1
=
> 0,
50
EJDE-2015/111
= 1/5, respectively, in R ∈ (0, +∞). More(1) dG01 R2
dR
=−
1
< 0.
832
4. Zeros of second order averaged functions
In this section, we consider the number of the zeros of second order averaged
function associated with system (2.5), in the case where the first order averaged
function is F10 (R) ≡ 0. On the basis of formula (3.4), we obtain the following result.
Lemma 4.1. For system (2.5), the first order averaged function F10 (R) ≡ 0 holds
if and only if
(1)
(1)
(1)
(1)
(1)
(1)
a30 = −b03 , a12 = b03 , b21 = −b03 .
(4.1)
When condition (4.1) holds, the second order averaged function associated with
system (2.5) takes the form
Z 2π h
i
∂F1 (R, ϕ)
1
y1 (R, ϕ) + F2 (R, ϕ) dϕ,
(4.2)
F20 (R) =
2π 0
∂R
where
i
(1 + R2 cos2 ϕ)2 h
Qp1 − P q1 F1 (R, ϕ) =
R
x=ρ cos ϕ,y=ρ sin ϕ
h
(1)
(1)
(1)
3
4
= R − b03 cos ϕ + a21 + b30 cos3 ϕ sin ϕ
i
(1)
(1)
(1)
+ a03 + b12 cos ϕ sin3 ϕ + b03 sin4 ϕ
h
R5
(1)
(1)
(1)
− b30 cos5 ϕ sin ϕ + a21 − b12 cos3 ϕ sin3 ϕ
+
2
2
1 + R cos ϕ
i
(1)
+ a03 cos ϕ sin5 ϕ ,
F2 (R, ϕ)
(1 + R2 cos2 ϕ)2 h
(Qp1 − P q1 )(xq1 − yp1 ) i
Qp2 − P q2 −
R
x2 + y 2
x=ρ cos ϕ, y=ρ sin ϕ
i
(1 + R2 cos2 ϕ)2 h
=
Qp2 − P q2 R
x=ρ cos ϕ, y=ρ sin ϕ
n
R5
(1)
(1)
(1)
(1) (1)
8
+
b
cos7 ϕ sin ϕ
+
b
b
cos
ϕ
−
b
a
03
30
21
30
30
1 + R2 cos2 ϕ
h
(1)
(1)
(1)
(1)
(1)
(1)
(1)
+ b03 b12 − a21 cos6 ϕ sin2 ϕ − a21 + b30 b12 − a21
i
(1)
(1)
(1)
(1)
(1)
(1)
+ b30 a03 + b12
cos5 ϕ sin3 ϕ − b03 a03 + b30 cos4 ϕ sin4 ϕ
i
h
(1)
(1)
(1)
(1)
(1)
(1)
(1)
cos3 ϕ sin5 ϕ
+ a03 a21 + b30 − a03 + b12 b12 − a21
o
(1)
(1)
(1)
(1)
(1)
(1) (1)
(1)
− b03 b12 − a21 cos2 ϕ sin6 ϕ + a03 a03 + b12 cos ϕ sin7 ϕ + a03 b03 sin8 ϕ
n
2
R7
(1)
(1)
(1)
(1)
9
+
b
cos
ϕ
sin
ϕ
−
2b
a
−
b
cos7 ϕ sin3 ϕ
30
30
21
12
(1 + R2 cos2 ϕ)2
=
EJDE-2015/111
LIMIT CYCLES FROM A CUBIC REVERSIBLE SYSTEM
9
2 (1) (1)
(1)
(1)
(1)
(1)
(1)
− 2a03 b30 − a21 − b12
cos5 ϕ sin5 ϕ − 2a03 b12 − a21 cos3 ϕ sin7 ϕ
2
o
(1)
+ a03 cos ϕ sin9 ϕ ,
Z
ϕ
y1 (R, ϕ) =
F1 (R, θ)dθ
Z0 ϕ
=
h
(1)
(1)
(1)
R3 − b03 cos4 θ + a21 + b30 cos3 θ sin θ
0
i
(1)
(1)
(1)
+ a03 + b12 cos θ sin3 θ + b03 sin4 θ dθ
Z ϕ
Z ϕ cos3 θ sin3 θ
h
cos5 θ sin θ
(1)
(1)
(1)
dθ
+
a
dθ
−
b
+ R5 − b30
21
12
2
2
2
2
0 1 + R cos θ
0 1 + R cos θ
Z ϕ
i
cos θ sin5 θ
(1)
+ a03
dθ ,
2
2
0 1 + R cos θ
and P, Q, pk and qk (k = 1, 2) are defined as before.
To compute the function y1 (R, ϕ), in the following we first need to figure out
some integral equalities.
Lemma 4.2. The following integral equalities hold.
Z ϕ
1
1
R2
2
2
d
cos
θ
=
ln
1
−
sin
ϕ
,
2
2
R2
1 + R2
0 1 + R cos θ
Z ϕ
1
1
1
R2
cos2 θ
2
2
2
d
cos
θ
=
−
+
cos
ϕ
−
ln
1
−
sin
ϕ
,
2
2
R2
R2
R4
1 + R2
0 1 + R cos θ
Z ϕ
cos4 θ
1
1
1
1
d cos2 θ = − 2 + 4 − 4 cos2 ϕ +
cos4 ϕ
2 cos2 θ
2
1
+
R
2R
R
R
2R
0
R2
1
2
sin
ϕ
,
+ 6 ln 1 −
R
1 + R2
Z ϕ
cos6 θ
1
1
1
1
1
d cos2 θ = − 2 +
− 6 + 6 cos2 ϕ −
cos4 ϕ
2 cos2 θ
4
4
1
+
R
3R
2R
R
R
2R
0
1
1
R2
+
cos6 ϕ − 8 ln 1 −
sin2 ϕ .
2
2
3R
R
1+R
Based on Lemma 4.2, we obtain the following result.
Lemma 4.3. The following integral equalities hold.
Z ϕ
cos5 θ sin θ
1
1
1
1
dθ =
−
+
cos2 ϕ −
cos4 ϕ
2 cos2 θ
2
4
4
2
1
+
R
4R
2R
2R
4R
0
1
R2
−
ln 1 −
sin2 ϕ ,
6
2
2R
1+R
Z ϕ
cos3 θ sin3 θ
1
1
1
1 1
dθ
=
+
+
−
−
cos2 ϕ +
cos4 ϕ
2
2
2
4
2
4
4R
2R
2R
2R
4R2
0 1 + R cos θ
1
1 R2
2
+
+
ln
1
−
sin
ϕ
,
2R4
2R6
1 + R2
10
L. PENG, Z. FENG
Z
ϕ
0
EJDE-2015/111
1
cos θ sin5 θ
1
1 1
3
+
+
cos2 ϕ −
cos4 ϕ
dθ = − 2 −
2
2
4
2
1 + R cos θ
4R
2R
R
2R4
4R2
1
1 R2
1
− 4−
ln 1 −
sin2 ϕ .
+ −
2
6
2
2R
R
2R
1+R
Using Lemmas 4.2 and 4.3 and a straightforward computation, we have
y1 (R, ϕ)
(1)
=
(1)
(1)
(1)
(1)
(1)
(1)
(1)
a21 − 3a03 − b30 − b12 3 a21 − a03 + b30 − b12
R +
R
4
2
(1)
(1)
(1)
(1)
(1)
(1)
h
i
−a21 + a03 − b30 + b12
a + b30
(1)
+ − b03 sin ϕ cos ϕ + 21
sin2 ϕ +
sin4 ϕ R3
2
4
(1)
(1)
(1)
(1) i
h −a(1) + 2a(1) + b(1)
−a21 + a03 − b30 + b12
21
03
12
+
R3 +
R cos2 ϕ
2
2
(1)
(1)
(1)
(1)
a − a03 + b30 − b12 3
R cos4 ϕ
+ 21
4
(1)
(1)
(1)
(1)
(1)
(1)
(1)
h a(1)
a − 2a03 − b12
a − a03 + b30 − b12 i
+ − 03 R3 + 21
R + 21
2
2
2R
R2
sin2 ϕ .
× ln 1 −
1 + R2
Lemma 4.4. The following integral equalities hold.
Z 2π
1
2π
dϕ = √
,
2
2
1 + R cos ϕ
1 + R2
0
Z 2π
h 2
i
cos2 ϕ
2
√
dϕ
=
π
−
,
1 + R2 cos2 ϕ
R2
R2 1 + R2
0
Z 2π
h 1
i
2
2
cos4 ϕ
√
dϕ = π 2 − 4 +
,
2
2
1 + R cos ϕ
R
R
R4 1 + R2
0
Z 2π
h 3
i
1
2
2
cos6 ϕ
√
dϕ
=
π
−
+
−
,
1 + R2 cos2 ϕ
4R2
R4
R6
R6 1 + R2
0
Z 2π
h 5
i
cos8 ϕ
3
1
2
2
√
dϕ
=
π
−
+
−
+
,
1 + R2 cos2 ϕ
8R2
4R4
R6
R8
R8 1 + R2
0
Z 2π
h 4
i
R2
4 p
2
2+2 .
(cos4 ϕ − sin4 ϕ) ln 1 −
sin
ϕ
dϕ
=
π
−
1
+
R
1 + R2
R2
R2
0
Proof. The first integral equalities can be obtained by a direct computation. Here
we only show the derivation of the last integral. Let
Z 2π
N1 (r) =
cos4 ϕ ln 1 − r2 sin2 ϕ dϕ,
0
Z
2π
N2 (r) =
sin4 ϕ ln 1 − r2 sin2 ϕ dϕ,
0
where r2 = R2 /(1 + R2 ). Since
Z 2π
0
0
N1 (r) − N2 (r) = −2r
0
sin2 ϕ
dϕ + 4r
1 − r2 sin2 ϕ
Z
0
2π
sin4 ϕ
dϕ
1 − r2 sin2 ϕ
EJDE-2015/111
LIMIT CYCLES FROM A CUBIC REVERSIBLE SYSTEM
=√
1−
11
4πr
√
,
+ 1 − r2 )2
r2 (1
and N1 (0) = N2 (0) = 0, we get
Z r
1
1 p
1
N10 (s) − N20 (s) ds = 4π
N1 (r) − N2 (r) =
− 2 1 + R2 +
.
2
R
R
2
0
This enables us to arrive at the last integral equality.
By Lemma 4.4, we obtain the following result.
Lemma 4.5. The following integral equalities hold.
Z 2π
h 1
i
cos6 ϕ sin2 ϕ
1
1
2
2
2 1
√
−
+
+
+
−
−
dϕ
=
π
,
1 + R2 cos2 ϕ
8R2
4R4
R6
R8
R6
R8
1 + R2
0
Z 2π
h 1
2
i
cos4 ϕ sin4 ϕ
3
3
2
4
2 1
dϕ = π
−
− 6− 8+
+ 6+ 8 √
,
2
2
2
4
4
1 + R cos ϕ
8R
4R
R
R
R
R
R
1 + R2
0
Z 2π
cos2 ϕ sin6 ϕ
dϕ
1 + R2 cos2 ϕ
0
h 5
i
15
5
2
2
6
6
2 1
√
+
+
+
+
−
−
−
−
=π
,
8R2
4R4
R6
R8
R2
R4
R6
R8
1 + R2
Z 2π
sin8 ϕ
dϕ
1 + R2 cos2 ϕ
0
h
i
35
7
2
8
12
8
2 35
1
√
−
−
−
+
2
+
+
+
+
=π −
,
8R2
4R4
R6
R8
R2
R4
R6
R8
1 + R2
Z 2π
cos8 ϕ sin2 ϕ
dϕ
(1 + R2 cos2 ϕ)2
0
i
h 1
1
3
8
7
8 1
√
−
+
+
+
−
−
,
=π
8R4
2R6
R8
R10
R8
R10
1 + R2
Z 2π
cos6 ϕ sin4 ϕ
dϕ
(1 + R2 cos2 ϕ)2
0
h 1
5
i
3
9
8
13
8 1
√
=π
−
−
−
+
+
+
,
8R4
2R6
R8
R10
R6
R8
R10
1 + R2
Z 2π
cos4 ϕ sin6 ϕ
dϕ
(1 + R2 cos2 ϕ)2
0
h 5
i
15
15
8
3
14
19
8 1
=π
+
+ 8 + 10 + − 4 − 6 − 8 − 10 √
,
4
6
8R
2R
R
R
R
R
R
R
1 + R2
Z 2π
5
h 1
i
cos6 ϕ sin2 ϕ
2
6
6 1
√
dϕ
=
π
−
−
+
+
,
(1 + R2 cos2 ϕ)2
4R4
R6
R8
R6
R8
1 + R2
0
Z 2π
h 3
i
cos4 ϕ sin4 ϕ
6
6
3
9
6 1
√
dϕ
=
π
+
+
+
−
−
−
,
(1 + R2 cos2 ϕ)2
4R4
R6
R8
R4
R6
R8
1 + R2
0
Z 2π
cos2 ϕ sin6 ϕ
dϕ
(1 + R2 cos2 ϕ)2
0
h
1
i
15
10
6
8
13
6 1
√
−
−
+
+
+
+
.
=π −
4R4
R6
R8
R2
R4
R6
R8
1 + R2
12
L. PENG, Z. FENG
EJDE-2015/111
Proposition 4.6. Under condition (4.1), the second order averaged function associated with system (2.5) has at most two simple zeros, and this upper bound can
be reached.
Proof. Define
0
F21
(R) =
1
2π
Z
2π
0
∂F1 (R, ϕ)
y1 (R, ϕ)dϕ,
∂R
0
F22
(R) =
1
2π
Z
2π
F2 (R, ϕ)dϕ.
0
Then (4.2) becomes
0
0
F20 (R) = F21
(R) + F22
(R).
0
Step 1: Computation of the function F21
(R). Let
h
(1)
(1)
(1)
(1)
(1)
A1 = 3R2 − b03 cos4 ϕ + a21 + b30 cos3 ϕ sin ϕ + a03 + b12 cos ϕ sin3 ϕ
i
(1)
+ b03 sin4 ϕ ,
5R4 + 3R6 cos2 ϕ h
(1)
(1)
(1)
3
5
3
A2 =
−
b
cos
ϕ
sin
ϕ
+
a
−
b
30
21
12 cos ϕ sin ϕ
(1 + R2 cos2 ϕ)2
i
(1)
+ a03 cos ϕ sin5 ϕ ,
(1)
(1)
(1)
(1)
(1)
(1)
i
h
−a21 + a03 − b30 + b12
a + b30
(1)
sin2 ϕ +
sin4 ϕ ,
B1 = R3 − b03 sin ϕ cos ϕ + 21
2
4
(1)
(1)
(1)
(1)
(1)
(1)
(1)
(1)
a − 3a03 − b30 − b12 3 a21 − a03 + b30 − b12
R +
R
B2 = 21
4
2
(1)
(1)
(1)
(1)
h −a(1) + 2a(1) + b(1)
−a21 + a03 − b30 + b12 i
21
03
12
+
R3 +
R cos2 ϕ
2
2
(1)
(1)
(1)
(1)
a − a03 + b30 − b12 3
+ 21
R cos4 ϕ
4
(1)
(1)
(1)
(1)
(1)
(1)
(1)
h a(1)
a − 2a03 − b12
a − a03 + b30 − b12 i
R + 21
+ − 03 R3 + 21
2
2
2R
R2
× ln 1 −
sin2 ϕ .
1 + R2
Then it gives
∂F1 (R, ϕ)
= A1 + A2 ,
∂R
y1 (R, ϕ) = B1 + B2 ,
and
1
=
2π
A direct calculation shows
0
F21
(R)
Z
2π
(A1 B1 + A1 B2 + A2 B1 + A2 B2 )dϕ.
(4.3)
0
Z
2π
A1 B1 dϕ = 0.
(4.4)
0
Recalling that the function A2 B2 is odd with respect to ϕ, we get
Z 2π
A2 B2 dϕ = 0.
0
(4.5)
EJDE-2015/111
LIMIT CYCLES FROM A CUBIC REVERSIBLE SYSTEM
13
In addition, it is not difficult to verify that
Z 2π
1
A1 B2 dϕ
2π 0
Z 2π nh 3b(1) a(1) − 3a(1) − b(1) − b(1)
03
21
03
30
12
1
=
R5
2π 0
4
(1)
(1)
(1)
(1)
(1)
i
3b03 a21 − a03 + b30 − b12
R3 − cos4 ϕ + sin4 ϕ
+
2
(1)
(1)
(1)
(1)
(1)
(1)
(1)
(1)
h 3b03 − a21 + 2a(1)
i
3b03 − a21 + a03 − b30 + b12
03 + b12
+
R5 +
R3
2
2
(1)
(1)
(1)
(1)
5
3b03 a21 − a03 + b30 − b(1)
12 R
4
6
2
× − cos ϕ + cos ϕ sin ϕ +
4 (1)
(1)
(1)
(1)
h 3a(1) b(1)
3b03 a21 − 2a03 − b12
03 03
× − cos8 ϕ + cos4 ϕ sin4 ϕ +
R5 −
R3
2
2
(1)
(1)
(1)
(1)
(1)
i
3b03 a21 − a03 + b30 − b12
−
R cos4 ϕ − sin4 ϕ
2
o
R2
× ln 1 −
sin2 ϕ dϕ,
(4.6)
2
1+R
and
1
2π
Z
0
2π
Z
1 n 7 h (1) (1) 2π cos6 ϕ sin2 ϕ
A2 B1 dϕ =
5R b30 b03
dϕ
2π
(1 + R2 cos2 ϕ)2
0
Z 2π cos4 ϕ sin4 ϕ
(1)
(1)
(1)
− b03 a21 − b12
dϕ
(1 + R2 cos2 ϕ)2
0
Z 2π
i
cos2 ϕ sin6 ϕ
(1) (1)
dϕ
− a03 b03
(1 + R2 cos2 ϕ)2
0
Z
2π
h
cos8 ϕ sin2 ϕ
(1) (1)
+ 3R9 b30 b03
dϕ
(1 + R2 cos2 ϕ)2
0
Z 2π cos6 ϕ sin4 ϕ
(1)
(1)
(1)
− b03 a21 − b12
dϕ
(1 + R2 cos2 ϕ)2
0
Z 2π
io
cos4 ϕ sin6 ϕ
(1) (1)
− a03 b03
dϕ
.
(1 + R2 cos2 ϕ)2
0
Applying Lemmas 4.4 and 4.5 to (4.6) and (4.7) gives
Z 2π
1
A1 B2 dϕ
2π 0
(1)
(1)
(1)
(1)
(1)
1 n 3b03 a21 + 5a03 − b30 − b12
=
R5
2
8
(1)
(1)
(1)
(1)
(1)
3b03 − 3a21 + 15a03 + b30 + 3b12
+
R3
4
(4.7)
14
L. PENG, Z. FENG
(1)
(1)
(1)
(1)
(1)
EJDE-2015/111
(1)
(1)
(1)
(1)
(1)
6b03 a21 − a03 + b30 − b12
+ 3b03 − 3a21 + 5a03 − b30 + 3b12 R −
h
(1) (1)
(1)
(1)
(1)
(1)
+ − 6a03 b03 R3 + 6b03 a21 − 2a03 − b12 R
(1)
(1)
(1)
(1)
(1)
o
6b03 a21 − a03 + b30 − b12 ip
+
1 + R2 ,
R
R
(4.8)
and
1
2π
=
2π
Z
A2 B1 dϕ
(1)
(1)
(1)
(1)
(1)
n
3b
−
a
−
5a
+
b
+
b
03
21
03
30
12
1
0
2
+
8
(1)
(1)
(1)
(1)
(1)
b03 3a21 − 15a03 − b30 − 3b12
4
R5
R3
(1)
(1)
(1)
(1)
(1)
(1)
6b03
(1)
(1)
(1)
(1)
− a21 + a03 − b30 + b12
+ b03 − 3a21 + 5a03 − b30 + 3b12 R +
R
h
(1) (1) 5
(1) (1) 3
(1)
(1)
(1)
(1)
(1)
+ 4a03 b03 R + 2a03 b03 R + 2b03 3a21 − 4a03 + 2b30 − 3b12 R
(1)
(1)
(1)
(1)
(1)
o
6b03 a21 − a03 + b30 − b12 i
1
√
+
.
R
1 + R2
(4.9)
Substituting (4.4), (4.5), (4.8) and (4.9) in (4.3) yields
0
F21
(R)
=
(1)
(1)
(1)
(1)
(1)
n
b
−
3a
+
15a
+
b
+
3b
03
21
03
30
12
1
2
2
(1)
(1)
(1)
(1)
− 3a21 + 5a03 − b30 + 3b12 R
(1)
(1)
(1)
(1)
(1)
12b03 − a21 + a03 − b30 + b12
(1)
+ 4b03
+
R3
R
h
(1)
(1) (1)
(1)
(1)
(1)
+ − 6a03 b03 R3 + 6b03 a21 − 2a03 − b12 R
(1)
(1)
(1)
(1)
(1)
6b03 a21 − a03 + b30 − b12 ip
+
1 + R2
R
h
(1)
(1)
(1)
(1)
(1)
(1) (1)
(1) (1)
+ 4a03 b03 R5 + 2a03 b03 R3 + 2b03 3a21 − 4a03 + 2b30 − 3b12 R
(1)
(1)
(1)
(1)
(1)
o
6b03 a21 − a03 + b30 − b12 i
1
√
+
.
R
1 + R2
(4.10)
EJDE-2015/111
LIMIT CYCLES FROM A CUBIC REVERSIBLE SYSTEM
0
Step 2: Computation of the Function F22
(R). Similarly to Step 1, we have
Z 2π h
i
1
(1 + R2 cos2 ϕ)2 Qp2 − P q2 dϕ
2π 0
R
x=ρ cos ϕ, y=ρ sin ϕ
1 n (2)
(2)
(2)
(2)
(2)
(2)
=
a30 + a12 R4 + − a30 + 3a12 + b21 − 3b03 R2
2R
h
(2)
(2)
(2)
(2)
(2)
(2)
+ 2 − a30 + a12 + b21 − b03 + − 2 a12 − b03 R4
(2)
(2)
(2)
(2)
+ 2 a30 − 2a12 − b21 + 2b03 R2
i
o
1
(2)
(2)
(2)
(2)
+ 2 a30 − a12 − b21 + b03 √
.
1 + R2
15
(4.11)
Using Lemmas 4.4 and 4.5, we deduce that
Z 2π h
1
(1 + R2 cos2 ϕ)2 (Qp1 − P q1 )(xq1 − yp1 ) i
−
dϕ
2π 0
R
x2 + y 2
x=ρ cos ϕ, y=ρ sin ϕ
Z
Z
2π cos6 ϕ sin2 ϕ
R5 h (1) (1) 2π
cos8 ϕ
(1)
(1)
(1)
=
dϕ
+
b
b
−
a
dϕ
b30 b03
03
12
21
2π
1 + R2 cos2 ϕ
1 + R2 cos2 ϕ
0
0
Z
2π cos4 ϕ sin4 ϕ
(1)
(1)
(1)
dϕ
− b03 a03 + b30
1 + R2 cos2 ϕ
0
Z 2π cos2 ϕ sin6 ϕ
(1)
(1)
(1)
− b03 b12 − a21
dϕ
1 + R2 cos2 ϕ
0
Z 2π
i
sin8 ϕ
(1) (1)
+ a03 b03
dϕ
1 + R2 cos2 ϕ
0
(1)
(1)
(1)
(1)
(1)
1 n b03 a21 − 9a03 + b30 − b12
(1)
(1)
(1)
(1)
=
R3 + 4b03 a21 − 2a03 − b12 R
2
2
(1)
(1)
(1)
(1)
(1)
h
4b03 a21 − a03 + b30 − b12
(1) (1)
+ 2a03 b03 R5
+
R
(1)
(1)
(1)
(1)
(1)
(1)
(1)
(1)
(1)
− 2b03 a21 − 4a03 − b12 R3 − 2b03 3a21 − 5a03 + b30 − 3b12 R
(1)
(1)
(1)
(1)
(1)
o
4b03 a21 − a03 + b30 − b12 i
1
√
−
.
(4.12)
R
1 + R2
It follows from (4.11) and (4.12) that
(1)
(1)
(1)
(1)
(1)
nh
i
−
b
a
−
9a
+
b
b
30
12
03
21
03
1
(2)
(2)
0
F22
(R) =
+ a30 + a12 R3
2h
2
i
(2)
(1)
(1)
(2)
(2)
(2)
(1)
(1)
+ 4b03 a21 − 2a03 − b12 − a30 + 3a12 + b21 − 3b03 R
(2)
(2)
(2)
(1)
(1)
(2)
(1)
(1)
(1)
4b03 a21 − a03 + b30 − b12 + 2 − a30 + a12 + b21 − b03
+
R
h
(1) (1) 5
(1)
(1)
(1)
(1)
(2)
(2)
+ 2a03 b03 R − 2 b03 a21 − 4a03 − b12 + a12 − b03 R3
(1)
(1)
(1)
(1)
(1)
(2)
(2)
(2)
(2)
+ 2 b03 − 3a21 + 5a03 − b30 + 3b12 + a30 − 2a12 − b21 + 2b03 R
16
L. PENG, Z. FENG
(1)
+
4b03
(1)
(1)
(1)
EJDE-2015/111
(1)
− a21 + a03 − b30 + b12
(2)
(2)
(2)
(2)
+ 2 a30 − a12 − b21 + b03 i
R
o
1
×√
.
1 + R2
(4.13)
Based on (4.10) and (4.13), F20 (R) can be re-expressed as
i
1 nh (1) (1)
(1)
(1)
(1)
(2)
(2)
b03 − a21 + 3a03 + b30 + b12 + a30 + a12 R3
F20 (R) =
2h
i
(1)
(1)
(1)
(1)
(1)
(2)
(2)
(2)
(2)
+ 4b03 − 2a21 + 3a03 − b30 + 2b12 − a30 + 3a12 + b21 − 3b03 R
(1)
(1)
(1)
(1)
(1)
(2)
(2)
(2)
(2)
8b03 − a21 + a03 − b30 + b12 + 2 − a30 + a12 + b21 − b03
+
R
h
(1) (1) 3
(1)
(1)
(1)
(1)
+ − 6a03 b03 R + 6b03 a21 − 2a03 − b12 R
(1)
(1)
(1)
(1)
(1)
6b03 a21 − a03 + b30 − b12 ip
+
1 + R2
R
h
(1) (1)
(1)
(1)
(1)
(1)
(2)
(2)
+ 6a03 b03 R5 + 2 b03 − a21 + 5a03 + b12 − a12 + b03 R3
(1)
(1)
(1)
(2)
(2)
(2)
(2)
+ 2 b03 a03 + b30 + a30 − 2a12 − b21 + 2b03 R
(1)
(1)
(1)
(1)
(1)
(2)
(2)
(2)
(2)
2b03 a21 − a03 + b30 − b12 + 2 a30 − a12 − b21 + b03 i
+
R
o
1
×√
.
(4.14)
1 + R2
After making the transformations as before, (4.14) becomes
nh
w3
(1)
(1)
(1)
(1)
(1)
(2)
(2)
(2)
F20 (R) =
4b
−
a
+
a
−
b
+
b
− a30 + a12 + b21
03
21
03
30
12
(1 − w2 )3
i
h
i
(2)
(1)
(1)
(1)
(2)
(2)
(2)
(2)
− b03 w4 + 8b03 a03 + b30 + 2 a30 + a12 − b21 − b03 w2 (4.15)
o
(2)
(2)
(2)
(2)
+ 3a30 + a12 + b21 + 3b03 ,
which shows that the second order averaged function F20 (R) associated with system
(2.5) has at most two zeros in R ∈ (0, +∞), by taking into account the multiplicity.
Now we provide an example to demonstrate that this upper bound can be
reached. Consider the system
i
h 23
h
i
19
(2)
(2)
(1)
(1)
ẋ = −y + x2 y + ε a21 x2 y + a03 y 3 + ε2 − x3 + a21 x2 y + xy 2 + a03 y 3 ,
4
2
h
i
h
i
35 2
(1) 3
(1)
(2)
2
2 (2) 3
2
ẏ = x + xy + ε b30 x + b12 xy + ε b30 x + x y + b12 xy 2 ,
4
(4.16)
(k)
(k)
(k)
(k)
where a21 , a03 , b30 and b12 (k = 1, 2) are real. In the polar coordinates x =
ρ(R, ϕ) cos ϕ and y = ρ(R, ϕ) sin ϕ, system (4.16) becomes
dR
= εM1 (R, ϕ) + ε2 M2 (R, ϕ) + O(ε3 ),
dϕ
(4.17)
EJDE-2015/111
LIMIT CYCLES FROM A CUBIC REVERSIBLE SYSTEM
17
where
h
i
(1)
(1)
(1)
(1)
a21 + b30 cos3 ϕ sin ϕ + a03 + b12 cos ϕ sin3 ϕ
h
R5
(1)
(1)
(1)
3
5
3
+
−
b
cos
ϕ
sin
ϕ
+
a
−
b
30
21
12 cos ϕ sin ϕ
1 + R2 cos2 ϕ
i
(1)
+ a03 cos ϕ sin5 ϕ ,
M1 (R, ϕ) = R3
M2 (R, ϕ)
h 23
73
(2)
(2)
cos4 ϕ + a21 + b30 cos3 ϕ sin ϕ +
cos2 ϕ sin2 ϕ
= R3 −
4
4
n
i
R5
(2)
(2)
(2)
− b30 cos5 ϕ sin ϕ
+ a03 + b12 cos ϕ sin3 ϕ +
1 + R2 cos2 ϕ
29
(2)
(2)
cos4 ϕ sin2 ϕ + a21 − b12 cos3 ϕ sin3 ϕ
−
2
19
(2)
(1)
(1)
(1)
cos2 ϕ sin4 ϕ + a03 cos ϕ sin5 ϕ − b30 a21 + b30 cos7 ϕ sin ϕ
+
2
h
i
(1)
(1)
(1)
(1)
(1)
(1)
(1)
− a21 + b30 b12 − a21 + b30 a03 + b12
cos5 ϕ sin3 ϕ
h
i
(1)
(1)
(1)
(1)
(1)
(1)
(1)
+ a03 a21 + b30 − a03 + b12 b12 − a21
cos3 ϕ sin5 ϕ
o
n
2
R7
(1)
(1)
(1)
(1)
+ a03 a03 + b12 cos ϕ sin7 ϕ +
b
cos9 ϕ sin ϕ
30
(1 + R2 cos2 ϕ)2
h
2 i
(1)
(1)
(1)
(1) (1)
(1)
(1)
− 2b30 a21 − b12 cos7 ϕ sin3 ϕ − 2a03 b30 − a21 − b12
cos5 ϕ sin5 ϕ
2
o
(1)
(1)
(1)
(1)
− 2a03 b12 − a21 cos3 ϕ sin7 ϕ + a03 cos ϕ sin9 ϕ .
It is not difficult to verify that for system (4.17), the first order averaged function
M10 (R) ≡ 0, while the second order averaged function M20 (R) takes the form
Z
Z
i
73 2π
1 n 3 h 23 2π
R −
cos4 ϕdϕ +
cos2 ϕ sin2 ϕdϕ
M20 (R) =
2π
4 0
4 0
Z
h 29 Z 2π cos4 ϕ sin2 ϕ
io
19 2π cos2 ϕ sin4 ϕ
+ R5 −
dϕ
+
dϕ
2
2
2
2
2 0 1 + R cos ϕ
2 0 1 + R cos ϕ
3
24w
1
1
=
w−
w− ,
(1 − w2 )3
4
6
where R and w are defined as before. Apparently, M20 (R) has exactly two positive
zeros, denoted by
8
12
(2)
(2)
R1 =
, R2 =
,
15
35
(2)
(2)
corresponding to w1 = 1/4 and w2 = 1/6, respectively, in R ∈ (0, +∞). Moreover, we have
(2)
(2)
0
dM20 R1
dM
R
2
2
4
6
=
> 0,
=−
< 0.
dR
255
dR
1295
18
L. PENG, Z. FENG
EJDE-2015/111
5. Zeros of third order averaged function
Lemma 5.1. For system (2.5), the second order averaged function F20 (R) ≡ 0
(given by (4.15)) if and only if
(2)
(2)
(1)
(1)
(1)
(1)
(1)
a30 = −b03 + b03 − a21 + a03 − b30 + b12 ,
(2)
(2)
(1)
(1)
(1)
(1)
a12 = b03 + 2b03 a21 − 2a03 − b12 ,
(5.1)
(2)
(2)
(1)
(1)
(1)
(1)
(1)
b21 = −b03 + b03 a21 + a03 + 3b30 − b12 .
(1)
Corollary 5.2. Suppose b03 = 0 in system (2.5), then the second order averaged
function F20 (R) ≡ 0 if and only if
(2)
(2)
(2)
a30 = −b03 ,
(2)
(2)
(2)
b21 = −b03 .
a12 = b03 ,
(5.2)
Consider the third order averaged function F30 (R) associated with system (2.5)
(1)
in the case where conditions (4.1), (5.2) and b03 = 0 hold:
0
0
0
0
F30 (R) = F31
(R) + F32
(R) + F33
(R) + F34
(R),
(5.3)
where
2π
1
4π
Z
1
0
F32
(R) =
4π
Z
0
F31
(R) =
0
∂ 2 F1 (R, ϕ) 2
y1 (R, ϕ)dϕ,
∂R2
2π
0
Z
∂F1 (R, ϕ)
y2 (R, ϕ)dϕ,
∂R
2π
∂F2 (R, ϕ)
y1 (R, ϕ)dϕ,
∂R
0
Z 2π
1
0
F34
(R) =
F3 (R, ϕ)dϕ,
2π 0
Z ϕh
i
∂F1 (R, θ)
y1 (R, θ) + F2 (R, θ) dθ,
y2 (R, ϕ) = 2
∂R
0
0
F33
(R) =
(1)
y1 (R, ϕ) =
(1)
1
2π
(1)
(1)
(1)
(1)
(1)
(1)
a21 − 3a03 − b30 − b12 3 a21 − a03 + b30 − b12
R +
R
4
2
(1)
(1)
(1)
(1)
(1)
(1)
a + b30 3 2
−a21 + a03 − b30 + b12 3 4
+ 21
R sin ϕ +
R sin ϕ
2
4
(1)
(1)
(1)
(1)
h −a(1) + 2a(1) + b(1)
−a21 + a03 − b30 + b12 i
12
21
03
+
R3 +
R cos2 ϕ
2
2
(1)
(1)
(1)
(1)
a − a03 + b30 − b12 3
+ 21
R cos4 ϕ
4
(1)
(1)
(1)
(1)
(1)
(1)
(1)
h a(1)
a − 2a03 − b12
a − a03 + b30 − b12 i
+ − 03 R3 + 21
R + 21
2
2
2R
R2
2
× ln 1 −
sin ϕ ,
1 + R2
h
i
∂F1 (R, ϕ)
(1)
(1)
(1)
(1)
= 3R2 a21 + b30 cos3 ϕ sin ϕ + a03 + b12 cos ϕ sin3 ϕ
∂R
EJDE-2015/111
LIMIT CYCLES FROM A CUBIC REVERSIBLE SYSTEM
19
5R4 + 3R6 cos2 ϕ h
(1)
− b30 cos5 ϕ sin ϕ
(1 + R2 cos2 ϕ)2
i
(1)
(1)
(1)
+ a21 − b12 cos3 ϕ sin3 ϕ + a03 cos ϕ sin5 ϕ ,
+
h
i
∂ 2 F1 (R, ϕ)
(1)
(1)
(1)
(1)
= 6R a21 + b30 cos3 ϕ sin ϕ + a03 + b12 cos ϕ sin3 ϕ
2
∂R
2R3 (10 + 9R2 cos2 ϕ + 3R4 cos4 ϕ) h
(1)
− b30 cos5 ϕ sin ϕ
+
(1 + R2 cos2 ϕ)3
i
(1)
(1)
(1)
+ a21 − b12 cos3 ϕ sin3 ϕ + a03 cos ϕ sin5 ϕ .
Here explicit expressions of F2 (R, ϕ) and F3 (R, ϕ) will be given in Steps 3 and 4
below, respectively.
(1)
Proposition 5.3. Under conditions (4.1), (5.2) and b03 = 0, the third order averaged function associated with system (2.5) has at most two simple zeros, and this
upper bound can be reached.
Proof. To compute the third order averaged function F30 (R), we divide our discussions into four steps.
0
Step 1: Computation of the function F31
(R). Recall that ∂ 2 F1 (R, ϕ)/∂R2 is odd
2
with respect to ϕ while y1 (R, ϕ) is even. Then we find
0
F31
(R) = 0.
(5.4)
0
Step 2: The Computation of the Function F32
(R). According to Lemma 2.1,
y2 (R, ϕ) takes the form
Z ϕ
∂F1 (R, θ)
y1 (R, θ) + F2 (R, θ) dθ
y2 (R, ϕ) = 2
∂R
0
Z ϕ
Z ϕh
∂F1 (R, θ)
(1 + R2 cos2 θ)2 =2
y1 (R, θ)dθ + 2
Qp2 − P q2
∂R
R
0
0
(Qp1 − P q1 )(xq1 − yp1 ) i
dθ.
−
x2 + y 2
x=ρ cos θ, y=ρ sin θ
Since ∂F1 (R, θ)/∂R is an odd function with respect to the variable θ and y1 (R, θ)
is even, we obtain
Z
Z 2π
∂F1 (R, ϕ) ϕ ∂F1 (R, θ)
y1 (R, θ)dθ dϕ = 0.
∂ϕ
∂θ
0
0
Similar to the computation of y1 (R, ϕ), we have
Z ϕ
i
(1 + R2 cos2 θ)2 h
Qp2 − P q2 dθ
R
x=ρ cos θ, y=ρ sin θ
0
(2)
=
(2)
(2)
(2)
(2)
(2)
(2)
(2)
a21 − 3a03 − b30 − b12 3 a21 − a03 + b30 − b12
R +
R
4
2
(2)
(2)
(2)
(2)
(2)
(2)
h
i
a + b30
−a21 + a03 − b30 + b12
(2)
sin2 ϕ +
sin4 ϕ R3
+ − b03 sin ϕ cos ϕ + 21
2
4
(2)
(2)
(2)
(2) i
h −a(2) + 2a(2) + b(2)
−a21 + a03 − b30 + b12
21
03
12
+
R3 +
R cos2 ϕ
2
2
20
L. PENG, Z. FENG
(2)
(2)
(2)
EJDE-2015/111
(2)
a21 − a03 + b30 − b12 3
R cos4 ϕ
4
(2)
(2)
(2)
(2)
(2)
(2)
(2)
h a(2)
a − 2a03 − b12
a − a03 + b30 − b12 i
+ − 03 R3 + 21
R + 21
2
2
2R
2
R
× ln 1 −
sin2 ϕ .
1 + R2
A straightforward computation yields
Z ϕ
(1 + R2 cos2 θ)2 h (Qp1 − P q1 )(xq1 − yp1 ) i
−
dθ
R
x2 + y 2
x=ρ cos θ, y=ρ sin θ
0
n
h
(1)
(1)
(1)
(1)
(1)
(1)
(1)
= −R5 b30 a21 + b30 I7,1 + a21 + b30 b12 − a21
i
h
(1)
(1)
(1)
(1)
(1)
(1)
+ b30 a03 + b12 I5,3 + − a03 a21 + b30
i
o
(1)
(1)
(1)
(1)
(1)
(1)
(1)
+ a03 + b12 b12 − a21 I3,5 − a03 a03 + b12 I1,7
n 2
h
(1)
(1)
(1)
(1)
(1) (1)
− R7 − b30 J9,1 + 2b30 a21 − b12 J7,3 + 2a03 b30
2 i
2
o
(1)
(1)
(1)
(1)
(1)
(1)
− a21 − b12
J5,5 + 2a03 b12 − a21 J3,7 − a03 J1,9 ,
+
where
Z
Ik,l =
0
ϕ
(5.5)
cosk θ sinl θ
dθ,
1 + R2 cos2 θ
for k, l = 1, 3, 5, 7 and
Z
ϕ
Jk,l =
0
cosk θ sinl θ
dθ,
(1 + R2 cos2 θ)2
for k, l = 1, 3, 5, 7, 9.
Apparently, Ik,l (k, l = 1, 3, 5, 7) and Jk,l (k, l = 1, 3, 5, 7, 9) are all even functions
with respect to ϕ, so does the integral (5.5). This fact together with the odd
function ∂F1 (R, ϕ)/∂R leads to
Z 2π
Z
∂F1 (R, ϕ) ϕ (1 + R2 cos2 θ)2 h (Qp1 − P q1 )(xq1 − yp1 ) i
−
x=ρ cos θ, dθ dϕ
2
2
∂R
R
x +y
0
0
y=ρ sin θ
= 0.
0
Hence, F32
(R) can be simplified as
0
F32
(R)
Z 2π
Z
i
1
∂F1 (R, ϕ) ϕ (1 + R2 cos2 θ)2 h
=
Qp2 − P q2 dθ dϕ
2π 0
∂ϕ
R
x=ρ cos θ,y=ρ sin θ
0
Z 2π h
(2)
i
n
b
(1)
(1)
(1)
(1)
= − 03 R5
3 a21 + b30 cos4 ϕ sin2 ϕ + a03 + b12 cos2 ϕ sin4 ϕ dϕ
2π
0
i
h
(1)
(1)
(1)
(1)
2
+ 5R − b30 J6,2 + a21 − b12 J4,4 + a03 J2,6
io
h
(1)
(1)
(1)
(1)
+ 3R4 − b30 J8,2 + a21 − b12 J6,4 + a03 J4,6 ,
where
Z
Jk,l =
0
ϕ
cosk θ sinl θ
dθ,
(1 + R2 cos2 θ)2
EJDE-2015/111
LIMIT CYCLES FROM A CUBIC REVERSIBLE SYSTEM
21
for k = 2, 4, 6, 8; l = 2, 4, 6. In view of Lemma 4.5, we have
(1)
(1)
(2) n 3 a
(1)
(1)
(1)
(1)
21 + 3a03
b
−3a21 + 15a03 + b30 + 3b12 2
0
F32
(R) = − 03 R
R4 +
R
2
4
4
(1)
+
(1)
3a21
−
(1)
5a03
+
(1)
b30
−
(1)
3b12
(1)
(1)
(1)
6 a21 − a03 + b30 − b12
+
R2
(1) 4
(1) 2
(1)
(1)
(1)
(1)
+ − 4a03 R − 2a03 R + 2 − 3a21 + 4a03 − 2b30 + 3b12
(1)
(1)
(1)
(1)
o
6 − a21 + a03 − b30 + b12 i
1
√
+
.
R2
1 + R2
(5.6)
h
0
Step 3: Computation of the Function F33
(R). Note that when conditions (4.1)
and (5.2) hold, we derive that
i
(1 + R2 cos2 ϕ)2 h
Qp2 − P q2 R
x=ρ cos ϕ, y=ρ sin ϕ
h
(2)
(2)
(2)
(2)
(2)
3
4
= R − b03 cos ϕ + a21 + b30 cos3 ϕ sin ϕ + a03 + b12 cos ϕ sin3 ϕ
h
i
R5
(2)
(2)
− b30 cos5 ϕ sin ϕ
+ b03 sin4 ϕ +
1 + R2 cos2 ϕ
i
(2)
(2)
(2)
+ a21 − b12 cos3 ϕ sin3 ϕ + a03 cos ϕ sin5 ϕ .
A straightforward computation gives
(1 + R2 cos2 ϕ)2 h (Qp1 − P q1 )(xq1 − yp1 ) i
−
R
x2 + y 2
x=ρ cos ϕ, y=ρ sin ϕ
n
5
R
(1)
(1)
(1)
=−
b
a + b30 cos7 ϕ sin ϕ
1 + R2 cos2 ϕ 30 21
h
i
(1)
(1)
(1)
(1)
(1)
(1)
(1)
+ a21 + b30 b12 − a21 + b30 a03 + b12
cos5 ϕ sin3 ϕ
h
i
(1)
(1)
(1)
(1)
(1)
(1)
(1)
+ − a03 a21 + b30 + a03 + b12 b12 − a21
cos3 ϕ sin5 ϕ
o
n 2
R7
(1)
(1)
(1)
(1)
− a03 a03 + b12 cos ϕ sin7 ϕ −
−
b
cos9 ϕ sin ϕ
30
(1 + R2 cos2 ϕ)2
(1)
(1)
(1)
+ 2b30 a21 − b12 cos7 ϕ sin3 ϕ
2 i
h
(1)
(1)
(1)
(1)
(1)
(1) (1)
cos5 ϕ sin5 ϕ + 2a03 b12 − a21 cos3 ϕ sin7 ϕ
+ 2a03 b30 − a21 − b12
2
o
(1)
− a03 cos ϕ sin9 ϕ .
Hence, we have
F2 (R, ϕ)
(1 + R2 cos2 ϕ)2 h
(Qp1 − P q1 )(xq1 − yp1 ) i
Qp2 − P q2 −
R
x2 + y 2
x=ρ cos ϕ, y=ρ sin ϕ
h
(2)
(2)
(2)
(2)
(2)
3
4
3
= R − b03 cos ϕ + a21 + b30 cos ϕ sin ϕ + a03 + b12 cos ϕ sin3 ϕ
=
22
L. PENG, Z. FENG
EJDE-2015/111
n
R5
(2)
(2)
(2)
3
5
3
−
b
cos
ϕ
sin
ϕ
+
a
−
b
30
21
12 cos ϕ sin ϕ
1 + R2 cos2 ϕ
(2)
(1)
(1)
(1)
+ a03 cos ϕ sin5 ϕ − b30 a21 + b30 cos7 ϕ sin ϕ
h
i
(1)
(1)
(1)
(1)
(1)
(1)
(1)
− a21 + b30 b12 − a21 + b30 a03 + b12
cos5 ϕ sin3 ϕ
h
i
(1)
(1)
(1)
(1)
(1)
(1)
(1)
+ a03 a21 + b30 − a03 + b12 b12 − a21
cos3 ϕ sin5 ϕ
n
2
o
R7
(1)
(1)
(1)
(1)
b
cos9 ϕ sin ϕ
+ a03 a03 + b12 cos ϕ sin7 ϕ +
30
(1 + R2 cos2 ϕ)2
h
2 i
(1)
(1)
(1)
(1) (1)
(1)
(1)
− 2b30 a21 − b12 cos7 ϕ sin3 ϕ − 2a03 b30 − a21 − b12
cos5 ϕ sin5 ϕ
2
o
(1)
(1)
(1)
(1)
− 2a03 b12 − a21 cos3 ϕ sin7 ϕ + a03 cos ϕ sin9 ϕ .
i
(2)
+ b03 sin4 ϕ +
Differentiating the function F2 (R, ϕ) with respect to R yields
∂F2 (R, ϕ)
∂R h
(2)
(2)
(2)
(2)
(2)
= 3R2 − b03 cos4 ϕ + a21 + b30 cos3 ϕ sin ϕ + a03 + b12 cos ϕ sin3 ϕ
i 5R4 + 3R6 cos2 ϕ n
(2)
(2)
− b30 cos5 ϕ sin ϕ
+ b03 sin4 ϕ +
(1 + R2 cos2 ϕ)2
(2)
(2)
(2)
(1)
(1)
(1)
+ a21 − b12 cos3 ϕ sin3 ϕ + a03 cos ϕ sin5 ϕ − b30 a21 + b30 cos7 ϕ sin ϕ
h
i
(1)
(1)
(1)
(1)
(1)
(1)
(1)
− a21 + b30 b12 − a21 + b30 a03 + b12
cos5 ϕ sin3 ϕ
h
i
(1)
(1)
(1)
(1)
(1)
(1)
(1)
+ a03 a21 + b30 − a03 + b12 b12 − a21
cos3 ϕ sin5 ϕ
o
(1)
(1)
(1)
+ a03 a03 + b12 cos ϕ sin7 ϕ
7R6 + 3R8 cos2 ϕ n (1) 2
(1) (1)
(1)
b30 cos9 ϕ sin ϕ − 2b30 (a21 − b12 ) cos7 ϕ sin3 ϕ
+
(1 + R2 cos2 ϕ)3
h
2 i
(1) (1)
(1)
(1)
(1)
(1)
(1)
− 2a03 b30 − a21 − b12
cos5 ϕ sin5 ϕ − 2a03 b12 − a21 cos3 ϕ sin7 ϕ
2
o
(1)
+ a03 cos ϕ sin9 ϕ .
Then
0
F33
(R)
1
=
2π
Z
2π
∂F2 (R, ϕ)
y1 (R, ϕ)dϕ
∂R
0
Z
(1)
(1)
(1)
(1)
(1)
(1)
(1)
(1)
3R2 2π n (2) h a21 − 3a03 − b30 − b12 3 a21 − a03 + b30 − b12 i
=
b03
R +
R
2π 0
4
2
(1)
(1)
3
b(2)
03 a21 + b30 R − cos4 ϕ sin2 ϕ + sin6 ϕ
× − cos4 ϕ + sin4 ϕ +
2
(2)
(1)
(1)
(1)
(1)
b03 − a21 + a03 − b30 + b12 R3 +
− cos4 ϕ sin4 ϕ + sin8 ϕ
4
EJDE-2015/111
LIMIT CYCLES FROM A CUBIC REVERSIBLE SYSTEM
23
(1)
(1)
(1)
(1)
(1)
(1)
h (1)
−a21 + a03 − b30 + b12 i
(2) −a21 + 2a03 + b12
+ b03
R3 +
R
2
2
× − cos6 ϕ + cos2 ϕ sin4 ϕ
(2)
(1)
(1)
(1)
(1)
b03 a21 − a03 + b30 − b12 R3 − cos8 ϕ + cos4 ϕ sin4 ϕ
+
4
(1)
(1)
(1)
(1)
(1)
(1)
(1)
h a(1)
a − 2a03 − b12
a − a03 + b30 − b12 i
(2)
+ b03 − 03 R3 + 21
R + 21
2
2
2R
o
2
R
sin2 ϕ dϕ.
(5.7)
× − cos4 ϕ + sin4 ϕ ln 1 −
1 + R2
By applying Lemma 4.4, the above equality becomes
0
F33
(R)
=
(2)
(1)
(1)
n
3b
a
+
3a
03
21
03
R
2
4
(2)
R4 +
3b03
(1)
(1)
(1)
(1)
− 3a21 + 15a03 + b30 + 3b12
R2
4
(2)
(1)
(1)
(1)
(1)
6b03 a21 − a03 + b30 − b12
(1)
(1)
(1)
(1)
− 3a21 + 5a03 − b30 + 3b12 −
h
(2)
(1)
(1)
(1)
(1)
+ 3b03 − 2a03 R2 + 2 a21 − 2a03 − b12
(1)
(1)
(1)
(1)
o
2 a21 − a03 + b30 − b12 ip
2 .
+
1
+
R
R2
(2)
+ 3b03
R2
0
Step 4: Computation of the function F34
(R). Recall that
h
(1 + R2 cos2 ϕ)2
Qp3 − P q3
F3 (R, ϕ) =
R
(Qp1 − P q1 )(xq2 − yp2 ) + (Qp2 − P q2 )(xq1 − yp1 )
−
x2 + y 2
(Qp1 − P q1 )(xq1 − yp1 )2 i
+
.
(x2 + y 2 )2
x=ρ cos ϕ, y=ρ sin ϕ
Similarly, we have
Z 2π
i
1
(1 + R2 cos2 ϕ)2 h
Qp3 − P q3 dϕ
2π 0
R
x=ρ cos ϕ, y=ρ sin ϕ
1 n (3)
(3)
(3)
(3)
(3)
(3)
=
a30 + a12 R4 + − a30 + 3a12 + b21 − 3b03 R2
2R
h
(3)
(3)
(3)
(3)
(3)
(3)
(5.8)
+ 2 − a30 + a12 + b21 − b03 + − 2 a12 − b03 R4
i
o
1
(3)
(3)
(3)
(3)
(3)
(3)
(3)
(3)
+ 2 a30 − 2a12 − b21 + 2b03 R2 + 2 a30 − a12 − b21 + b03 √
.
1 + R2
Given the expressions
(1)
(1)
(1)
(1)
(1)
Qp1 − P q1 = a21 + b30 x3 y + a03 + b12 xy 3 − b30 x5 y
(1)
(1)
(1)
+ a21 − b12 x3 y 3 + a03 xy 5 ,
(k)
(k)
(k)
(k)
xqk − ypk = b30 x4 + b12 − a21 x2 y 2 − a03 y 4 , k = 1, 2,
24
L. PENG, Z. FENG
EJDE-2015/111
we assert that both (Qp1 − P q1 )(xq2 − yp2 ) and (Qp1 − P q1 )(xq1 − yp1 )2 are the
odd functions with respect to y, which lead to
Z
Z
2π
0
2π
0
(1 + R2 cos2 ϕ)2 h (Qp1 − P q1 )(xq2 − yp2 ) i
dϕ = 0,
R
x2 + y 2
x=ρ cos ϕ, y=ρ sin ϕ
(1 + R2 cos2 ϕ)2 h (Qp1 − P q1 )(xq1 − yp1 )2 i
dϕ = 0.
R
(x2 + y 2 )2
x=ρ cos ϕ, y=ρ sin ϕ
Recall that
(2)
(2)
(2)
(2)
(2)
(2)
Qp2 − P q2 = −b03 x4 + a21 + b30 x3 y + a03 + b12 xy 3 + b03 y 4
(2)
(2)
(2)
(2)
− b30 x5 y + a21 − b12 x3 y 3 + a03 xy 5 ,
(1)
(1)
(1)
(1)
xq1 − yp1 = b30 x4 + b12 − a21 x2 y 2 − a03 y 4 .
Then
2π
(1 + R2 cos2 ϕ)2 h (Qp2 − P q2 )(xq1 − yp1 ) i
dϕ
R
x2 + y 2
x=ρ cos ϕ,y=ρ sin ϕ
0
Z 2π
Z 2π cos6 ϕ sin2 ϕ
R5 h
cos8 ϕ
(1) (2)
(2)
(1)
(1)
=−
− b30 b03
dϕ
−
b
b
−
a
dϕ
03
12
21
2π
1 + R2 cos2 ϕ
1 + R2 cos2 ϕ
0
0
Z 2π cos4 ϕ sin4 ϕ
(2)
(1)
(1)
dϕ
+ b03 a03 + b30
1 + R2 cos2 ϕ
0
Z 2π
Z 2π cos2 ϕ sin6 ϕ
i
sin8 ϕ
(2)
(1)
(1)
(1) (2)
+ b03 b12 − a21
dϕ
−
a
b
dϕ
.
03 03
1 + R2 cos2 ϕ
1 + R2 cos2 ϕ
0
0
1
−
2π
Z
By using Lemmas 4.4 and 4.5, the above function becomes
2π
(1 + R2 cos2 ϕ)2 h (Qp2 − P q2 )(xq1 − yp1 ) i
dϕ
R
x2 + y 2
x=ρ cos ϕ, y=ρ sin ϕ
0
(1)
(1)
(1)
(1)
n b(2)
− a21 + 9a03 − b30 + b12
03
(1)
(2)
(1)
(1)
= −R
R2 + 2b03 − a21 + 2a03 + b12
4
(2)
(1)
(1)
(1)
(1)
2b03 − a21 + a03 − b30 + b12
+
R2 h
(1)
(1)
(1)
(1) (2) 4
(2)
+ − a03 b03 R + b03 a21 − 4a03 − b12 R2
(1)
(1)
(1)
(1)
(2)
+ b03 3a21 − 5a03 + b30 − 3b12
(2)
(1)
(1)
(1)
(1)
o
2b03 a21 − a03 + b30 − b12 i
1
√
+
.
R2
1 + R2
1
−
2π
Z
EJDE-2015/111
LIMIT CYCLES FROM A CUBIC REVERSIBLE SYSTEM
25
Thus, we obtain
(0)
F34 (R)
Z 2π
1
=
F3 (R, ϕ)dϕ
2π 0
(2)
(1)
(1)
(1)
(1)
nh
i
b
a
−
9a
+
b
−
b
03
21
03
30
12
1
(3)
(3)
=
+ a30 + a12 R4
2Rh
2
i
(2)
(1)
(1)
(1)
(3)
(3)
(3)
(3)
+ 4b03 a21 − 2a03 − b12 − a30 + 3a12 + b21 − 3b03 R2
h
i
(2)
(1)
(1)
(1)
(1)
(3)
(3)
(3)
(3)
+ 4b03 a21 − a03 + b30 − b12 + 2 − a30 + a12 + b21 − b03
h
(1) (2)
(2)
(1)
(1)
(1)
(3)
(3)
+ 2a03 b03 R6 + 2b03 − a21 + 4a03 + b12 + 2 − a12 + b03 R4
(2)
(1)
(1)
(1)
(1)
(3)
(3)
(3)
(3)
+ − 2b03 3a21 − 5a03 + b30 − 3b12 + 2 a30 − 2a12 − b21 + 2b03 R2
o
i
1
(2)
(1)
(1)
(1)
(1)
(3)
(3)
(3)
(3)
√
.
+ − 4b03 a21 − a03 + b30 − b12 + 2 a30 − a12 − b21 + b03
1 + R2
(5.9)
Substituting (5.4), (5.6), (5.8) and (5.9) in (5.3), and making the transformation
R = 2w/(1 − w2 ), we obtain
F30 (R)
=
nh
i
w3
(2)
(1)
(1)
(1)
(1)
(3)
(3)
(3)
(3)
4
4b
−
a
+
a
−
b
+
b
−
a
+
a
+
b
−
b
03
21
03
30
12
30
12
21
03 w
(1 − w2 )3
h
i
(2)
(1)
(1)
(3)
(3)
(3)
(3)
+ 8b03 a03 + b30 + 2 a30 + a12 − b21 − b03 w2
o
(3)
(3)
(3)
(3)
+ 3a30 + a12 + b21 + 3b03 ,
which has form similar to F20 (R) given by (4.15). Hence, F30 (R) has at most two
simple zeros in R ∈ (0, +∞), and this upper bound can be reached.
(k) (k) (k)
(k)
For any sufficiently small |ε|, and any real constants a21 , a03 , b30 and b12 (k =
1, 2, 3), we take the following differential system as an example
h
i
h
i
(1)
(1)
(2)
(2)
ẋ = −y + x2 y + ε a21 x2 y + a03 y 3 + ε2 a21 x2 y + a03 y 3
i
h 13
21
(3)
(3)
+ ε3 − x3 + a21 x2 y + xy 2 + a03 y 3 ,
2 h
2i
(5.10)
i
h
(1)
(2)
(2)
(1) 3
2
ẏ = x + xy + ε b30 x + b12 xy 2 + ε2 b30 x3 + b12 xy 2
h
i
(3)
(3)
+ ε3 b30 x3 + 10x2 y + b12 xy 2 .
The third order averaged function corresponding to system (5.10) has exactly two
(3)
(3)
simple zeros R1 = 3/4 and R2 = 9/40.
Now we are in a position to prove Theorem 1.1.
It follows immediately from Corollary 2.2 and Propositions 3.1, 4.6 and 5.3 that
system (2.5) has at most two periodic orbits, and there exist some systems which
have exactly two periodic orbits shrinking to the corresponding hyperbolic equilibriums of their averaged equations, respectively. This implies that under the
26
L. PENG, Z. FENG
EJDE-2015/111
hypothesis of Theorem 1.1, system (1.2) has at most two limit cycles emerging
from the period annulus around the center of the unperturbed system (1.2)|ε=0 ,
and the upper bound can be reached.
Acknowledgments. This research is supported by the National Science Foundation of China under No. 11371046 and No. 11290141.
References
[1] V. I. Arnold, Y. S. Ilyashenko; Dynamical systems I: Ordinary differential equations, Encyclopaedia Math. Sci., Vol. 1, Springer, Berlin, 1986.
[2] A. Atabaigi, N. Nyamoradi, H. R. Z. Zangeneh; The number of limit cycles of a quintic
polynomial system with a center, Nonlinear Anal., 71 (2009), 3008-3017.
[3] R. Benterki, J. Llibre; Limit cycles of polynomial differential equations with quintic homogeneous nonlinearities, J. Math. Anal. Appl., 407 (2013), 16-22.
[4] A. Buică, J. Llibre; Averaging methods for finding periodic orbits via Brouwer degree, Bull.
Sci. Math., 128 (2004), 7-22.
[5] A. Buică, J. Llibre; Limit cycles of a perturbed cubic polynominal differential center, Chaos
Solitons Fractals, 32 (2007), 1059-1069.
[6] T. R. Blows, L. M. Perko; Bifurcation of limit cycles from centers and separatrix cycles of
planar analytic systems, SIAM Rev., 36 (1994), 341-376.
[7] F. D. Chen, C. Li, J. Llibre, Z. H. Zhang; A unified proof on the weak Hilbert 16th problem
for n = 2, J. Differential Equations, 221 (2006), 309-342.
[8] B. Coll, J. Llibre, R. Prohens; Limit cycles bifurcating from a perturbed quartic center, Chaos
Solitons Fractals, 44 (2011), 317-334.
[9] B. Coll, A. Gasull, R. Prohens; Bifurcation of limit cycles from two families of centers, Dyn.
Contin. Discrete Impuls. Syst., Ser. A (Math. Anal.), 12 (2005), 275-287.
[10] C. Chicone, M. Jacobs; Bifurcation of limit cycles from quadratic isochrones, J. Differential
Equations, 91 (1991), 268-326.
[11] L. Gavrilov, I. D. Iliev; Quadratic perturbations of quadratic codimension-four centers, J.
Math. Anal. Appl., 357 (2009), 69-76.
[12] S. Gautier, L. Gavrilov, I. D. Iliev; Perturbations of quadratic center of genus one, Discrete
Contin. Dyn. Syst., 25(2009), 511-535.
[13] H. Giacomini, J. Llibre, M. Viano; On the nonexistence, existence and uniqueness of limit
cycles, Nonlinearity, 9 (1996), 501-516.
[14] H. Giacomini, J. Llibre, M. Viano; On the shape of limit cycles that bifurcate from Hamiltonian centers, Nonlinear Anal., 41 (2000), 523-537.
[15] H. Giacomini, J. Llibre, M. Viano; On the shape of limit cycles that bifurcate from nonHamiltonian centers, Nonlinear Anal., 43 (2001), 837-859.
[16] J. Giné, J. Llibre; Limit cycles of cubic polynomial vector fields via the averaging theory,
Nonlinear Anal., 66 (2007), 1707-1721.
[17] D. Hilbert; Mathematische probleme, Arch. Math. Phys., 1(1901), 213-237.
[18] I. D. Iliev; Perturbations of quadratic centers, Bull. Sci. Math., 122 (1998), 107-161.
[19] C. Li, J. Llibre, Z. Zhang; Weak focus, limit cycles and bifurcations for bounded quadartic
systems, J. Differential Equations, 115 (1995), 193-223.
[20] C. Li, J. Llibre; Quadratic perturbations of a quadratic reversible Lotka-Volterra system,
Qual. Theory Dyn. Syst., 9 (2010), 235-249.
[21] J. Llibre, J. S. Pérez del Rı́o, J. A. Rodrı́guez; Averaging analysis of a perturbed quadratic
center, Nonlinear Anal., 46 (2001), 45-51.
[22] J. Llibre; Averaging theory and limit cycles for quadratic systems, Radovi Matematic̆ki, 11
(2002), 1-14.
[23] M. Viano, J. Llibre, H. Giacomini; Arbitrary order bifurcations for perturbed Hamiltonian
planar systems via the reciprocal of an integrating factor, Nonlinear Anal., 48 (2002), 117-136.
[24] G. Xiang, M. Han; Global bifurcation of limit cycles in a family of polynomial systems, J.
Math. Anal. Appl., 295 (2004), 633-644.
EJDE-2015/111
LIMIT CYCLES FROM A CUBIC REVERSIBLE SYSTEM
27
Linping Peng (corresponding author)
School of Mathematics and System Sciences, Beihang University, LIMB of the Ministry
of Education, Beijing 100191, China
E-mail address: penglp@buaa.edu.cn Fax 86-(10)8231-7933
Zhaosheng Feng
Department of Mathematics, University of Texas-Pan American, Edinburg, TX 78539,
USA
E-mail address: zsfeng@utpa.edu