Electronic Journal of Differential Equations, Vol. 2006(2006), No. 53, pp.... ISSN: 1072-6691. URL: or
advertisement
, No. 53, pp.... ISSN: 1072-6691. URL: or")
Electronic Journal of Differential Equations, Vol. 2006(2006), No. 53, pp. 1–16.
ISSN: 1072-6691. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu
ftp ejde.math.txstate.edu (login: ftp)
NONLINEAR TRANSMISSION PROBLEM WITH A
DISSIPATIVE BOUNDARY CONDITION OF MEMORY TYPE
DOHERTY ANDRADE, LUCI HARUE FATORI, JAIME E. MUÑOZ RIVERA
Abstract. We consider a differential equation that models a material consisting of two elastic components. One component is clamped while the other is
in a viscoelastic fluid producing a dissipative mechanism on the boundary. So,
we have a transmission problem with boundary damping condition of memory
type. We prove the existence of a global solution and its uniformly decay to
zero as time approaches infinity. More specifically, the solution decays exponentially provided the relaxation function decays exponentially.
1. Introduction
In this paper, we model the oscillation of a solid consisting of two elastic materials. We suppose that a part of the boundary is inside a viscoelastic fluid producing
a dissipative mechanism of memory type while the other part of the boundary is
clamped. The corresponding mathematical equations which model this situation is
called a transmission problem with boundary dissipation.
Boundary dissipation was studied for several authors, see for example, [8, 29,
11, 30, 4, 21, 31, 3] and the references therein, all of them dealing with frictional
damping. Models with memory dissipation are physically and mathematically more
interesting, physically because our model follows the constitutive equations for materials with memory and Mathematically because the estimates we need to show
the exponential decay are more delicate and depends on the relaxation function,
see for example [2] and the references therein.
Memory dissipation is produced by the interaction of materials with memory.
Such types of dissipation are subtle and their analysis are more delicate than the
frictional damping, because introduce another type of technical difficulties. So, we
have only a few works in this direction.
In this work we show the existence of solutions of a nonlinear transmission problem with boundary dissipation of memory type. Moreover we will prove that under
suitable conditions on the relaxation functions the solution will decay uniformly as
time goes to infinity. The transmission problem considered here is
ρ1 utt − γ1 ∆u + f (u) = 0,
in Ω1 ×]0, T [,
(1.1)
ρ2 vtt − γ2 ∆v + g(v) = 0,
in Ω2 ×]0, T [,
(1.2)
2000 Mathematics Subject Classification. 35B40, 35L70.
Key words and phrases. Wave equation; asymptotic behavior; memory.
c
2006
Texas State University - San Marcos.
Submitted November 10, 2005. Published April 28, 2006.
1
2
D. ANDRADE, L. HARUE FATORI, J. E. MUÑOZ RIVERA
EJDE-2006/53
with boundary condition
t
Z
k(t − τ )
u(x, t) +
0
∂u
dτ = 0
∂ν
on
Γ
(1.3)
and satisfying the transmission condition
∂u
∂v
= γ2
on Γ1 .
(1.4)
∂ν
∂ν
Additionally we assume that v satisfies Dirichlet boundary condition over Γ2 ,
u = v,
and
γ1
on Γ2 ×]0, T [,
v(x, t) = 0,
(1.5)
and verifies the initial conditions
u(x, 0) = u0 (x),
and ut (x, 0) = u1 (x)
in Ω1
v(x, 0) = v0 (x),
and vt (x, 0) = v1 (x)
in Ω2 .
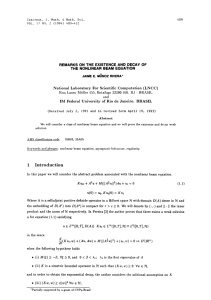
Γ1
'$
•
Ω2
x0
Γ2
Γ
&%
Ω1
Figure 1. The configuration
The transmission problem (1.1)-(1.2) can be consider as a semilinear wave equation with discontinuous coefficients and discontinuous and non linear terms; that
is, denoting
(
(
u(x), if x ∈ Ω1
ρ1 , if x ∈ Ω1
U=
ρ(x) =
v(x), if x ∈ Ω2 ,
ρ2 , if x ∈ Ω2 ,
(
(
γ1 , if x ∈ Ω1
f (x), if x ∈ Ω1
a(x) =
F (x) =
γ2 , if x ∈ Ω2 ,
g(x), if x ∈ Ω2 .
Note that (1.1)-(1.2) is equivalent to
ρ(x)Utt − a(x)∆U + F (U ) = 0,
in Ω × (0, T )
where Ω = Ω1 × Ω2 .
2. Existence of solutions
Lemma 2.1. For each function α ∈ C 1 and each ϕ ∈ W 1,2 (0, T ), we have
Z t
Z t 1
1 0
1 d
2
αϕ −
α |ϕ|2 . (2.1)
α(t − τ )ϕ(τ )dτ ϕt = − α(t)|ϕ(t)| + α ϕ −
2
2
2
dt
0
0
EJDE-2006/53
NONLINEAR TRANSMISSION PROBLEM
3
Let a be a function that satisfies
k(0)a + k 0 ∗ a = −
k0
.
k(0)
(2.2)
Rt
By ∗ we denote the convolution product; that is, k ∗ g(·, t) = 0 k(t − τ )g(·, τ ) dτ .
The function a is called the resolvent kernel of k. Using the Volterra’s resolvent,
we have
1
∂u
=−
ut − a ∗ ut
∂ν
k(0)
after performing an integration by parts, the above identity is equivalent to
∂u
1
=−
ut − a(0)u − a0 ∗ u + a(t)u0 .
(2.3)
∂ν
k(0)
We assume the following hypotheses on a:
a(t) > 0,
a0 (t) < 0,
0
00
a00 (t) > 0,
0
−c0 a (t) ≤ a (t) ≤ −c1 a (t),
∀t ≥ 0
∀t ≥ 0,
(2.4)
(2.5)
where ci are positive constants. To facilitate our calculation we introduce the
following notation
Z t
2
(αf )(t) =
α(t − τ ) |f (t) − f (τ )| dτ,
(2.6)
0
Z t
(α♦f )(t) =
g(t − τ ) [f (t) − f (τ )] dτ.
(2.7)
0
It follows that
(α ∗ f )(t) =
Z
t
α(s)ds f (t) − (α♦f )(t).
(2.8)
0
From hypothesis (2.2), we know that the behavior of a is similar to the behavior of
k. We can find the following Lemma in [28].
Lemma 2.2. If b and α satisfy b + α = −b ∗ α, then
(i) Suppose that |α(t)| ≤ cα e−γt , for all t > 0, for some γ > 0, and cα > 0,
then for any 0 < ε < γ and cα < γ − ε, we have
|b(t)| ≤
cα (γ − ε) −εt
e ,
γ − ε − cα
∀t > 0.
(ii) If α satisfies |α(t)| ≤ cα (1 + t)−p , for some p > 1, cα > 0 and
Z t
1
> cp := sup
(1 + t)p (1 + t − τ )−p (1 + τ )−p dτ,
cα
0≤t<∞ 0
then
|b(t)| ≤
cα
(1 + t)−p , ∀ t > 0.
1 − cα cp
Let us introduce the following two vector spaces
W = {w ∈ H 1 (Ω2 ) : w(x) = 0 on Γ2 },
V = {(u, v) ∈ H 1 (Ω1 ) × W : u = v on Γ1 }.
Let us consider f, g ∈ C 1 (R) satisfying
|f (s)| ≤ C1 |s|ρ + C2
and |g(s)| ≤ C1 |s|ρ + C2 ,
(2.9)
4
D. ANDRADE, L. HARUE FATORI, J. E. MUÑOZ RIVERA
|f 0 (s)| ≤ C1 |s|ρ−1 + C2
EJDE-2006/53
and |g 0 (s)| ≤ C1 |s|ρ−1 + C2 ,
(2.10)
where C1 and C2 are positive constants. When the space dimension is n ≤ 2, we
n
use 1 ≤ ρ < ∞, and when n ≥ 3, we use 1 ≤ ρ ≤ n−2
. We also assume that for
s ∈ R,
Z s
Z s
F (s) =
f (σ) dσ ≥ 0 and G(s) =
g(σ) dσ ≥ 0.
(2.11)
0
0
Let us introduce the definition of weak solution to system (1.1)–(1.5).
Definition 2.3. We say that the couple (u, v) is a weak solution of (1.1)–(1.5)
when
(u, v) ∈ L∞ (0, T ; V ), (ut , vt ) ∈ L∞ (0, T ; L2 (Ω1 ) × L2 (Ω2 )),
and satisfies
Z TZ
[ρ1 uφtt + γ1 ∇u∇φ + f (u)φ] dx dt
0
Ω1
T Z
Z
[ρ2 vψtt + γ2 ∇v∇ψ + g(v)ψ] dx dt
Z
Z
Z
v0 ψt (0)dx
v1 ψ(0)dx −
u0 φt (0)dx +
u1 φ(0)dx −
=
Ω2
Ω2
Ω1
Ω1
Z 1
−
ut + a(0)u + a0 ∗ u − a(t)u0 φ dΓ,
k(0)
Γ
+
Z0
Ω2
for any (φ, ψ) ∈ C 2 (0, T ; V ) such that
φ(T ) = φt (T ) = ψ(T ) = ψt (T ) = 0.
To show the existence of strong solutions we need a regularity result for the
elliptic system associated with the problem (1.1)–(1.5). For the reader’s convenience
we recall the following result whose proof can be found in the book by O. A.
Ladyzhenskaya and N. N. Ural’tseva [10, Theorem 16.2].
Lemma 2.4. For any given functions F ∈ L2 (Ω1 ), G ∈ L2 (Ω2 ), g ∈ H 1/2 (Γ),
γ1 , γ2 ∈ R+ , then there exists only one solution (u, v), with u ∈ H 2 (Ω1 ) and v ∈
H 2 (Ω2 ), to the system
−γ1 ∆u = F
−γ2 ∆v = G
v(x) = 0
in Ω1 ,
in Ω2 ,
on
Γ2
∂u
= g, on Γ,
∂ν
u(x) = v(x) on Γ1
∂u
∂v
= γ2
on Γ1 .
∂ν
∂ν
The existence result is summarized in the following theorem.
γ1
Theorem 2.5. Suppose that f and g are C 1 -functions satisfying (2.9)–(2.11) and
let us take initial data such that
(u0 , v0 ) ∈ V,
(u1 , v1 ) ∈ L2 (Ω1 ) × L2 (Ω2 ),
u0 = 0on Γ.
EJDE-2006/53
NONLINEAR TRANSMISSION PROBLEM
5
Then, there exists a solution (u, v) of system (1.1)–(1.5), such that
(u, v) ∈ C(0, T ; V ) ∩ C 1 (0, T ; L2 (Ω1 ) × L2 (Ω2 )).
In addition, if the second-order regularity holds, that is, (u0 , v0 ) ∈ H 2 (Ω1 )×H 2 (Ω2 )
and (u1 , v1 ) ∈ V , and
γ1
u2 :=
∆u0 − f (u0 ) ∈ L2 (Ω1 )
σ1
γ2
∆u0 − g(v0 ) ∈ L2 (Ω2 ),
v2 :=
σ2
satisfying the compatibility conditions
∂u0
1
=−
u1 − au0 on Γ
∂ν
k(0)
∂v
∂u
= γ2 , on Γ1
u0 = v0 and γ1
∂ν
∂ν
then there exists a strong solution satisfying (u, v) in the space
C(0, T ; H 2 (Ω1 ) × H 2 (Ω2 )) ∩ C 1 (0, T ; V ) ∩ C 2 (0, T ; L2 (Ω1 ) × L2 (Ω2 )).
Proof. To show the existence of solutions we use the Galerkin method. Let (ϕi , ωi ),
i = 1, . . . , ∞ be a basis of V and let us write
m
X
(um (t), v m (t)) =
hi (t)(ϕi , ωi ),
i=1
m
m
where u and v satisfy
Z
m
m
{ρ1 um
tt ϕi + γ1 ∇u ∇ϕi + f (u )ϕi }dx
Ω1
Z
m
{ρ2 vtt
ωi + γ2 ∇v m ∇ωi + g(v m )ωi }dx
+
Ω2
Z 1 m
m
0
m
m
=−
u + a(0)u + a ∗ u − a(t)u0 φi dΓ,
k(0) t
Γ
(2.12)
i = 1, 2, . . . , m.
This is a m-dimensional system of ODEs in hi (t) and has a local solution in t.
With the estimates obtained below, we can extend um and v m to the whole interval
[0, T ].
Weak Solutions. Multiplying the above equation by h0i (t) and summing up from
i = 1 to m, we have
Z
Z
Z
d m
1
1 0
1
2
m 2
E (t) = −
|um
|
dΓ
+
a
(t)
|u
|
dΓ
−
a00 um dΓ,
dt
2k(0) Γ t
2
2 Γ
Γ
where
Z
Z
Z
1
2
m 2
m
2
E m (t) =
{ρ1 |um
|
+
γ
|∇u
|
+
2F
(u
)}dx
+
a(t)
|u|
dΓ
−
a0 udΓ
1
t
2 Ω1
Γ
Γ
Z
1
+
{ρ2 |vtm |2 + γ2 |∇v m |2 + 2G(v m )}dx.
2 Ω2
Then we deduce that
(um , v m )
m
(um
t , vt )
is bounded in L∞ (0, T ; H 1 (Ω1 ) × H 1 (Ω2 )),
∞
2
2
is bounded in L (0, T ; L (Ω1 ) × L (Ω2 )),
(2.13)
(2.14)
6
D. ANDRADE, L. HARUE FATORI, J. E. MUÑOZ RIVERA
EJDE-2006/53
which imply that
weakly ? in L∞ (0, T ; H 1 (Ω1 ) × H 1 (Ω2 )),
(um , v m ) * (u, v)
m
(um
t , vt ) * (ut , vt )
weakly ? in L∞ (0, T ; L2 (Ω1 ) × L2 (Ω2 )).
Application of the Lions-Aubin’s Lemma [13, Theorem 5.1], we have
(um , v m ) → (u, v)
strongly in L2 (0, T ; L2 (Ω1 ) × L2 (Ω2 )),
and consequently
um → u
v
m
→v
a.e. in Ω1
and f (um ) → f (u)
a.e. in Ω1 ,
a.e. in Ω2
m
a.e. in Ω2 .
and g(v ) → g(v)
From the growth condition (2.9), we have
f (um )
is bounded in L∞ (0, T ; L2 (Ω1 )),
g(v m )
is bounded in L∞ (0, T ; L2 (Ω2 ));
therefore,
f (um ) * f (u)
weakly in L2 (0, T ; L2 (Ω1 )),
g(v m ) * g(v)
weakly in L2 (0, T ; L2 (Ω2 )).
The rest of the proof of the existence of weak solution is a matter of routine.
Strong Solutions. To show the regularity we take a basis of such that (u0 , v0 )
and (u1 , v1 ) are in B = {(φi , wi ), i ∈ N}. Therefore,
um
0 = u0 ,
v0m = v0 ,
um
1 = u1 ,
v1m = v1 ,
∀m.
Differentiate the approximate equation and multiply by h00i (t). Using a similar
argument as before, we obtain
Z
Z
d m
m
m
E2 (t) ≤
|f 0 (um )|um
u
dx
+
|g 0 (v m )|vtm vtt
dx,
(2.15)
t tt
dt
Ω1
Ω2
where
E2m (t) =
Z
1
2
m 2
m 2
ρ1 |um
|
+
γ
|∇u
|
dx
+
ρ2 |vtt
| + γ2 |∇vtm |2 dx
1
tt
t
2
Ω1
Ω2
Z
Z
1
1
m 2
0
m
+ a(t) |ut | dΓ +
a ut dΓ.
2
2 Γ
Γ
1
2
Z
(2.16)
Note that E2m (0) is bounded, in fact is constant, because of our choice of the basis.
Let us estimate the right hand side of (2.16). From (2.10) we have
Z
m
|f 0 (um )um
t utt | dx
Ω1
Z
Z
Z
C1
C2
C1 + C2
m 2(ρ−1) m 2
m 2
2
≤
|u |
|ut | dx +
|u | dx +
|um
tt | dx.
2 Ω1
2 Ω1 t
2
Ω1
But since (ρ − 1) ≤ 2/(n − 2) and 1r + 1s = 1 with r = n/2 and s = n/(n − 2), we
see that
Z
Z
1/r Z
1/s
2
m 2∗
2∗
|um |2(ρ−1) |um
|
dx
≤
|u
|
dx
|um
,
t
t | dx
Ω1
Ω1
Ω1
EJDE-2006/53
NONLINEAR TRANSMISSION PROBLEM
7
where 2∗ = 2n/(n − 2). Then from Sobolev imbeddings and (2.13) there exists a
constant C > 0 such that
Z
Z
2
2
|um |2(ρ−1) |um
|
dx
≤
C
+
C
|∇um
t
t | dx.
Ω1
It follows that
Z
0
|f (u
Ω1
m
m
)um
t utt | dx
Z
≤C +C
Ω1
2
m 2
{|um
tt | + |∇ut | } dx,
Ω1
and similarly
Z
0
|g (v
m
m
)vtm vtt
| dx
Z
≤C +C
Ω2
m 2
{|vtt
| + |∇vtm |2 } dx.
Ω2
Hence, from (2.15) and the Gronwall inequality we conclude that
m
(um
t , vt )
m
(um
tt , vtt )
is bounded in L∞ (0, T ; H 1 (Ω1 ) × H 1 (Ω2 )),
is bounded in L∞ (0, T ; L2 (Ω1 ) × L2 (Ω2 )),
which imply that
weakly ∗ in L∞ (0, T ; H 1 (Ω1 ) × H 1 (Ω2 )),
m
(um
t , vt ) * (ut , vt )
m
(um
tt , vtt ) * (utt , vtt )
weakly ∗ in L∞ (0, T ; L2 (Ω1 ) × L2 (Ω2 )).
Therefore, (u, v) satisfies (1.1)-(1.5). Moreover
1
∂u
=−
ut − a(0)u − a0 ∗ u + a(t)u0 .
∂ν
k(0)
Integrating by parts,
∂u
1
=−
ut − a ∗ ut .
∂ν
k(0)
Since ut is bounded in H 1 (Ω1 ),
∂u
∂ν
1
∈ H 2 (Γ). So we have
−γ1 ∆u = utt − f (u) ∈ L2 (Ω1 ),
−γ2 ∆v = vtt − g(v) ∈ L2 (Ω2 )
∂u
∂v
= γ2
in Γ1
∂ν
∂ν
∂u
v = 0 in Γ2 ,
∈ H 1/2 (Γ).
∂ν
u=v
and γ1
Then using Lemma 2.4 we have the required regularity to (u, v).
3. Asymptotic behavior
In this section we prove that the solution decay exponentially as time approaches
infinity. First, we need some preliminaries results.
Lemma 3.1. Suppose that the initial data satisfies the second order regularity as
in Theorem 2.5, then
Z
Z
Z
d
1
a0 (t)
1
2
2
E(t) = −
|ut | dΓ +
|u| dΓ −
a00 u dΓ,
dt
k(0) Γ
2
2 Γ
Γ
8
D. ANDRADE, L. HARUE FATORI, J. E. MUÑOZ RIVERA
EJDE-2006/53
where
E(t) =
1
2
+
Z
ρ1 |ut |2 + γ1 |∇u|2 + 2F (u)dx + γ1
Ω1
1
2
Z
a(t)|u|2 − a0 u dΓ
Γ
Z
(3.1)
ρ2 |vt |2 + γ2 |∇v|2 + 2G(v)dx.
Ω2
Proof. Multiply by ut equation (1.1) and by vt equation (1.2), summing up and
using identity (2.3) and Lemma 2.1 we get the result.
Let f and g be such that
Z
s
1
sf (s),
m
+1
0
Z s
1
g(t)dt ≤
sg(s),
0 ≤ G(s) :=
l+1
0
F (s) ≤ G(s)
0 ≤ F (s) :=
f (t)dt ≤
(3.2)
(3.3)
(3.4)
where l, m > 1. Note that odd polynomials satisfy (3.2)-(3.3). Let
δ < min{
l−1 m−1
n,
n, 1}
l+1 m+1
(3.5)
and
Z
Z
ρ1 ut q · ∇u dx +
J0 (t) =
Ω1
ρ2 vt q · ∇v dx.
Ω2
Lemma 3.2. Under the hypothesis of Lemma 3.1, consider q(x) = x − x0 ∈ C 1 (Ω),
γ1 > γ2 and ρ1 > ρ2 . Then any strong solution of (1.1)–(1.5) satisfies
Z
Z
Z
∂u
γ1
ρ1
d
2
J0 (t) ≤ γ1
q · ∇u dx −
q · ν|∇u| dx +
q · ν|ut |2 dΓ
dt
2 Γ
2 Γ
Γ ∂ν
Z
Z
Z
n
−
ρ1 |ut |2 − γ1 |u|2 dx + n
F (u)dx − γ1
|∇u|2 dx
2 Ω1
Ω1
Ω1
Z
Z
Z
n
2
2
ρ2 |vt | − γ2 |∇v| dx + n
G(v) dx − γ2
−
|∇v|2 dx.
2 Ω2
Ω2
Ω2
Proof. Using equation (1.1),
Z
∂u
d
ρ1 u t q k
dx
dt Ω1
∂xk
Z
Z
∂ut
∂u
=
ρ1 utt qk
dx +
ρ1 ut qk
dx
∂x
∂x
k
k
Ω1
Ω1
Z
Z
Z
∂u
∂u
ρ1
∂|ut |2
=
γ1 ∆uqk
dx −
f (u)qk
dx +
qk
dx
∂xk
∂xk
2 Ω1
∂xk
Ω1
Ω1
Z
Z
Z
∂u ∂u
γ1
γ1
∂qk
= γ1
qk
dΓ −
qk νk |∇u|2 dΓ +
|∇u|2 dx
∂ν
∂x
2
2
∂x
k
k
∂Ω1
∂Ω1
Ω1
Z
Z
Z
∂qk
ρ1
−
F (u)qk νk dΓ +
F (u)
dx +
qk νk |ut |2 dΓ
∂x
2
k
∂Ω1
Ω1
∂Ω1
Z
Z
ρ1
∂qk
∂u
2
−
|ut | dx − γ1
∇u · ∇qk
dx.
2 Ω1 ∂xk
∂xk
Ω1
EJDE-2006/53
NONLINEAR TRANSMISSION PROBLEM
So we have,
Z
Z
Z
d
∂u
γ1
∂u ∂u
ρ1 u t q k
dx = γ1
qk
dΓ −
qk νk |∇u|2 dΓ
dt Ω1
∂xk
∂ν
∂x
2
k
Z ∂Ω1
Z ∂Ω1
ρ1
qk νk |ut |2 dΓ
−
qk νk F (u)dΓ +
2
∂Ω1
∂Ω1
Z
1
∂qk 2
−
ρ1 |ut | − γ1 |∇u|2 dx
2 Ω ∂xk
Z 1
Z
∂qk
∂u
+
dx − γ1
dx.
F (u)
∇u · ∇qk
∂xk
∂xk
Ω1
Ω1
Similarly using equation (1.2), we obtain
Z
Z
Z
∂v
∂v
∂v
γ2
d
ρ2 vt qk
qk νk |∇v|2 dΓ
dx = −γ2
qk
dΓ +
dt Ω2
∂xk
∂ν
∂x
2
k
∂Ω2
Z ∂Ω2
Z
ρ2
qk νk G(v)dΓ −
+
qk νk |vt |2 dΓ
2
Γ1
Γ1
Z
1
∂qk 2
−
ρ2 |vt | − γ2 |∇v|2 dx
2 Ω ∂xk
Z 2
Z
∂qk
∂v
+
G(v)dx − γ2
dx.
∇v · ∇qk
∂xk
Ω2 ∂xk
Ω2
Using that ∇u =
∂u
∂ν ν
9
(3.6)
(3.7)
+ ∇τ u and v = 0 on Γ2 we have from (3.6) and (3.7) that
d
J0 (t)
dt Z
Z
Z
∂u
γ1
ρ1
q · ν|ut |2 dΓ
q · ∇u dΓ −
q · ν|∇u|2 dΓ +
2 Γ
2 Γ1
Γ ∂ν
Z
Z
Z
γ1
∂u
γ1
ρ1
+
q · ∇τ u dΓ −
q · ν|∇τ u|2 dΓ +
q · ν|ut |2 dΓ
2 Γ1 ∂ν
2 Γ1
2 Γ
Z
Z
γ2
∂v
−
q · νF (u) dΓ −
q · ν| |2 dΓ
2 Γ1
∂ν
∂Ω1
Z
Z
∂v
γ2
− γ2
q · ∇τ v dx +
q · ν|∇τ v|2 dΓ
2 Γ1
Γ1 ∂ν
Z
Z
γ1
∂u
+
q · νG(v) dΓ +
q · ν| |2 dΓ
2 Γ1
∂ν
Γ1
Z
Z
Z
ρ2
γ
∂v 2
1
∂qk
2
2
−
|vt | q · ν dΓ +
q · ν| | dΓ −
(ρ1 |ut |2 − γ1 |∇u|2 ) dx
2 Γ1
2 Γ2
∂ν
2 Ω1 ∂xk
Z
Z
Z
∂qk
∂u
1
∂qk
+
F (u)
dx − γ1
∇u · ∇qk
dx −
(γ2 |vt |2 − ρ2 |∇v|2 )dx
∂x
∂x
2
∂x
k
k
k
Ω1
Ω1
Ω2
Z
Z
∂qk
∂v
+
G(v)
dx − γ2
∇v · ∇qk
dx.
∂x
∂x
k
k
Ω2
Ω2
= γ1
Since u = v in Γ1 then ∇τ u = ∇τ v in Γ1 ; therefore,
d
J0 (t)
dt Z
Z
Z
∂u
γ1
ρ1
2
q · ∇u dΓ −
q · ν|∇u| dΓ +
q · ν|ut |2 dΓ
= γ1
2 Γ
2 Γ
Γ ∂ν
10
D. ANDRADE, L. HARUE FATORI, J. E. MUÑOZ RIVERA
EJDE-2006/53
Z
Z
γ1 γ1 − γ2 ∂u
γ1 − γ2 | |2 q · ν dΓ −
q · ν|∇τ u|2 dΓ
2
γ2
2
Γ1 ∂ν
Γ1
Z
Z
ρ1 − ρ2 2
+
q · ν|ut | dΓ − q · νF (u) dΓ
2
Γ1
Γ
Z
Z
∂v
γ2
q · ν| |2 dΓ
−
q · ν[F (u) − G(u)] dΓ +
2
∂ν
Γ1
Z
ZΓ2
n
ρ1 |ut |2 − γ1 |∇u|2 dx + n
F (u)dx
−
2 Ω1
Ω1
Z
Z
Z
Z
n
2
2
2
− γ1
ρ2 |vt | − γ2 |∇v| dx + n
G(v)dx − γ2
|∇u| dx −
|∇v|2 dx.
2 Ω2
Ω2
Ω1
Ω2
+
Using that (x − x0 ) · ν > 0 in Γ then we conclude our proof.
Lemma 3.3. Under the hypothesis in Lemma 3.1,
Z
Z
d
ρ1 uut dx +
ρ2 vt vdx
dt Ω1
Ω2
Z
Z
∂u
2
=
ρ1 |ut | − γ1 |∇u|2 dx + γ1
udΓ
Ω1
Γ ∂ν
Z
Z
Z
−
f (u)udx +
ρ2 |vt |2 − γ2 |∇v|2 dx −
Ω1
Ω2
g(v)vdx.
Ω2
Proof. Multiply (1.1) by u and (1.2) by v and summing up the product the our
result follows.
Let us define the functional
n − δ Φ(t) = J0 (t) +
2
Z
Z
ρ1 uut dx +
Ω1
ρ2 vt vdx
Ω2
where we consider q(x) = x − x0 as before.
Lemma 3.4. Under the hypotheses of Lemmas 3.1 and 3.2, there exists a positive
constant δ0 such that
Z
Z
Z
∂u 2
d
n − δ
∂u
ρ1
Φ(t) ≤ C
dΓ +
γ1 u dΓ − δ0 E0 (t) +
q · ν|ut |2 dΓ,
dt
2
2 Γ
Γ ∂ν
Γ ∂ν
where
1
E0 (t) =
2
Z
1
ρ1 |ut | + γ1 |∇u| + F (u)dx +
2
Ω1
2
2
Z
ρ2 |vt |2 + γ2 |∇v|2 + G(v)dx.
Ω2
Proof. From Lemma 3.2 and Lemma 3.3 we have,
d
Φ(t)
dt Z
Z
Z
i
∂u 2
δh
2
2
≤C
dΓ −
ρ1 |ut | + γ1 |∇u| dx +
ρ2 |vt |2 + γ2 |∇v|2 dx
2 Ω1
Γ ∂ν
Ω2
Z
Z
Z
n − δ
+n
F (u)dx + n
G(v)dx −
f (u)udx
2
Ω1
Ω2
Ω1
Z
Z
Z
n − δ
n − δ
∂u
ρ1
−
g(v)vdx +
γ1
udΓ +
q · ν|ut |2 dΓ.
2
2
∂ν
2
Ω2
Γ
Γ
EJDE-2006/53
NONLINEAR TRANSMISSION PROBLEM
11
Using the hypotheses on F and G, we obtain
Z
Z
Z
n
n−δ
n − δ
n
F (u)dx −
f (u)udx ≤
−
f (u)udx
2
m+1
2
Ω1
Ω1
Ω1
Z
≤ −α
f (u)udx,
Ω1
where by our assumption on δ we have that α > 0. Similarly
Z
Z
Z
n−δ
g(v)vdx ≤ −β
n
g(v)vdx.
G(v)dx −
2
Ω2
Ω2
Ω2
From where it follows that
Z
Z
∂u
n − δ
∂u
d
Φ(t) ≤ γ1 | |2 dΓ +
γ1 u dΓ
dt
∂ν
2
Γ
Γ ∂ν
Z
Z
i
δh
ρ2 |vt |2 + γ2 |∇v|2 dx
ρ1 |u|2 + γ1 |∇u|2 dx +
−
2 Ω1
Ω2
Z
Z
Z
ρ1
−α
uf (u)dx − β
vg(v)dx +
q · ν|ut |2 dΓ,
2 Γ
Ω1
Ω2
which implies that for δ0 = min 2δ , α(m + 1), β(l + 1) , we have
Z
Z
Z
d
∂u 2
n−δ
∂u
ρ1
Φ(t) ≤ γ1 | | dΓ +
γ1 u dΓ − δ0 E0 (t) +
q · ν|ut |2 dΓ.
dt
2
2 Γ
Γ ∂ν
Γ ∂ν
Theorem 3.5. With hypotheses in Lemma 3.2, there exists a positive constants
such that any strong solution satisfies
E(t) ≤ CE(0) exp(−δ1 t),
provided (2.4)-(2.5) holds.
Proof. Note that from (1.3) and (2.8) we have
∂u
1
=−
ut − a(t)u − a0 ♦u
∂ν
k(0)
from where it follows
|
1
∂u 2
| ≤ 2 2 |ut |2 + a2 (t)|u|2 + |a0 ♦u|2 .
∂ν
k (0)
Since
Z t
2 Z t
|a0 ♦u|2 = a0 (t − s){u(s) − u(t)}ds ≤
|a0 (t − s)|ds |a0 |u.
0
0
From this inequality and (2.5) it follows that
2
∂u ≤ k0 {|ut |2 + a(t)|u|2 + a0 u}.
∂ν (3.8)
12
D. ANDRADE, L. HARUE FATORI, J. E. MUÑOZ RIVERA
EJDE-2006/53
On the other hand,
Z
Z
1/2
1/2 Z ∂u 2
u ∂u dΓ ≤
2 dΓ
|u| dΓ
Γ ∂ν
Γ ∂ν
ZΓ
Z
≤ δ1 |u|2 dΓ + Cδ1 {|ut |2 + a(t)|u|2 + a0 u}dΓ
ZΓ
Z Γ
2
≤ δ1 |u| dΓ + C {|ut |2 + |u|2 + a0 u}dΓ.
Γ
Since
Z
(3.9)
Γ
|u|2 dΓ ≤ C
Γ
Z
|∇u|2 + |∇v|2 dx,
Ω
we have that L(t) = N E(t) + Φ(t) satisfies
Z
Z
Z
N γ1
N γ1 a0 (t)
N γ1
d
L(t) ≤ −
|ut |2 dΓ +
|u|2 dΓ −
a00 udΓ
dt
k(0) Γ
2
2
Γ
Γ
Z
Z
∂u 2
n − δ
∂u
dΓ +
γ1 u dΓ
+C
2
Γ ∂ν
Γ ∂ν
Z
δ0
− E0 (t) + ρ1 q · ν|ut |2 dΓ.
2
Γ
Using (4.2) and (4.3) we conclude that
Z
Z
d
N γ1
N γ1
δ0
2
L(t) ≤ −
− C2
|ut | dΓ −
− C2
a00 udΓ − E0 (t)
dt
k(0)
2
2
Γ
Γ
(3.10)
δ0
d
L(t) ≤ − E(t) ≤ −cL(t).
dt
2
from where our conclusion follows.
We remark that standard density arguments, the above result is also valid for
weak solutions.
4. Polynomial rate of decay
Here our attention turns to the uniform rate of decay when k decays polynomially
as (1 + t)−p . In this case we will show that the solution also decays polynomially
with the same rate. Let us consider the following hypotheses:
0 < a(t) ≤ b0 (1 + t)−p ,
1
1
−b1 a1+ p (t) ≤ a0 (t) ≤ −b2 a1+ p (t),
1
1+ p+1
b3 [−a0 (t)]
1
1+ p+1
≤ a00 (t) ≤ b4 [−a0 (t)]
(4.1)
,
where p > 1 and bi > 0 for i = 0, . . . , 4. The following lemmas will play an
important role in the sequel.
Lemma 4.1. Let m and h be integrable functions, 0 ≤ r < 1 and q > 0. Then, for
t ≥ 0,
Z t
|m(t − s)h(s)|ds
0
q/(q+1) Z t
1/(q+1)
Z t
1+ 1−r
q
|h(s)|ds
|m(t − s)|r |h(s)|ds
.
≤
|m(t − s)|
0
0
EJDE-2006/53
NONLINEAR TRANSMISSION PROBLEM
13
Proof. Let
q
r
v(s) := |m(t − s)|1− q+1 |h(s)| q+1 ,
r
1
w(s) := |m(t − s)| q+1 |h(s)| q+1 .
Applying Hölder’s inequality to |m(s)h(s)| = v(s)w(s) with exponents δ = q/(q +1)
for v and δ ∗ = q + 1 for w our conclusion follows.
Lemma 4.2. Let φ ∈ L∞ (0, T ; L2 (Γ)). Then, for p > 1, 0 ≤ r < 1 and t ≥ 0, we
have
Z
1+(1−r)(p+1)
(1−r)(p+1)
|a0 |φdΓ
Γ
Z
1
(1−r)(p+1)
Z t
1
≤2
|a0 (s)|r dskφk2L∞ (0,t;L2 (Γ))
|a0 |1+ p+1 φ dΓ,
0
Γ
while for r = 0 we get
Z
p+2
p+1
|a0 |φdΓ
Γ1
Z t
p+1 Z
1
≤2
kφ(s, .)k2L2 (Γ) ds + tkφ(s, .)k2L2 (Γ)
|a0 |1+ p+1 φ dΓ.
0
Γ
Proof. The above inequalities are a immediate consequence of Lemma 4.1 taking
Z
m(s) := |a0 (s)|, h(s) :=
|φ(t, x) − φ( s, x)|2 dΓ, q := (1 − r)(p + 1).
Γ
This concludes our assertion.
Theorem 4.3. With the hypotheses in Lemma 3.1 and Lemma 3.2, if the resolvent
kernel a(t) satisfies condition (4.1), then there is a positive constant c such that
E(t) ≤
c
E(0).
(1 + t)p+1
Proof. Note that from (1.3) and (2.8) we have
∂u
1
=−
ut − a(t)u − a0 ♦u
∂ν
k(0)
from which it follows
|
1
∂u 2
| ≤ 2 2 |ut |2 + a2 (t)|u|2 + |a0 ♦u|2 .
∂ν
a (0)
Since
Z t
2 Z t
1
1
|a0 ♦u|2 = a0 (t − s){u(s) − u(t)}ds ≤
|a0 (t − s)|1− p ds [−a0 ]1+ p u,
0
0
and (2.5), it follows that
2
∂u ≤ k0 {|ut |2 + [−a0 ]1+ p1 (t)|u|2 + [−a0 ]1+ p1 u}.
∂ν (4.2)
14
D. ANDRADE, L. HARUE FATORI, J. E. MUÑOZ RIVERA
EJDE-2006/53
On the other hand,
Z ∂u Z
1/2
1/2 Z ∂u 2
2 dΓ
u
≤
dΓ
|u|
dΓ
∂ν
Γ ∂ν
ZΓ
ZΓ
1
1
≤ δ1 |u|2 dΓ + δ1
|ut |2 + [−a0 ]1+ p (t)|u|2 + [−a0 ]1+ p u dΓ
Γ
ZΓ
2
1
≤C
|ut | + |u|2 + [−a0 ]1+ p u dΓ.
Γ
(4.3)
Since
Z
|u|2 dΓ ≤ C
Γ
Z
|∇u|2 + |∇v|2 dx,
Ω
we have L(t) = N E(t) + Φ(t) which satisfies
Z
Z
Z
1
N γ1
N γ1 a0 (t)
N γ1
d
L(t) ≤ −
|ut |2 dΓ +
|u|2 dΓ −
[−a0 ]1+ p udΓ
dt
k(0) Γ
2
2
Γ
Z
Z Γ
Z
∂u 2
1
n
−
δ
∂u
0 1+ p
dΓ +
+ C [−a ]
udΓ + C
γ1 u dΓ
2
Γ
Γ ∂ν
Γ ∂ν
Z
δ0
− E0 (t) + ρ1 q · ν|ut |2 dΓ.
2
Γ
Using (4.2) and (4.3), we conclude that
Z
Z
1
d
N γ1
N γ1
2
L(t) ≤ −
− C2
|ut | dΓ −
− C2
[−a0 ]1+ p udΓ
dt
k(0)
2
Γ
Γ
δ0
− E0 (t),
2
from where we have that for N large enough we get
Z
Z
1
d
N γ1
N γ1
δ0
2
L(t) ≤ −
|ut | dΓ −
[−a0 ]1+ p udΓ − E0 (t).
dt
2k(0) Γ
4
2
Γ
(4.4)
(4.5)
p
1
Let us fix 0 < r < 1 such that p+1
< r < p+1
. In this condition from hypothesis
(4.1) we have
Z ∞
Z ∞
1
< ∞ for i = 1, 2, 3, 4.
[−a0 ]r ≤ c
r(p+1)
(1
+
t)
0
0
Using this estimate in Lemma 4.2,
Z
1
Z
1+ (1−r)(p+1)
1
1
[−a0 ]1+ p+1 udΓ ≥ cE(0)− (1−r)(p+1)
[−a0 ]udΓ
,
Γ
(4.6)
Γ
On the other hand, since the energy is bounded we have
1
1
E(t)1+ (1−r)(p+1) ≤ cE(0) (1−r)(p+1) E(t).
(4.7)
Substitutinn (4.6)-(4.7) in (4.5), we arrive to
1
1
d
L(t) ≤ −cE(0)− (1−r)(p+1) E(t)1+ (1−r)(p+1)
dt
1
Z
1+ (1−r)(p+1)
1
− cE(0)− (1−r)(p+1)
[−a0 ]udΓ
.
Γ
Since there exists positive constants satisfying
c0 E(t) ≤ L(t) ≤ c1 E(t),
(4.8)
EJDE-2006/53
we obtain
NONLINEAR TRANSMISSION PROBLEM
1
d
c
L(t)1+ (1−r)(p+1) .
L(t) ≤ −
1
dt
L(0) (1−r)(p+1)
Therefore, using a Gronwall’s type argument we conclude that
c
L(t) ≤
L(0).
(1 + t)(1−r)(p+1)
15
(4.9)
(4.10)
Since (1 − r)(p + 1) > 1 we get, for t ≥ 0, the following bounds
tku(t, .)k2L2 (Γ) ≤ ctL(t) ≤ ∞,
Z ∞
Z t
L(t) ≤ ∞.
ku(s, .)k2L2 (Γ) ≤ c
0
0
Using the above estimates in Lemma 4.2 with r = 0, we get
Z
1
Z
1+ p+1
1
c
0 1+ p+1
[−a ]
[−a0 ]udΓ
udΓ ≥
.
1
Γ
Γ
E(0) p+1
Using these inequalities and the same arguments as in the derivation of (4.9), we
have
1
c
d
1+ p+1
.
L(t) ≤ −
1 L(t)
dt
L(0) p+1
c
From where we obtain L(t) ≤
L(0). Then inequality (4.8) implies E(t) ≤
(1 + t)p+1
c
E(0), which completes the proof.
(1 + t)p+1
We remark that by standard density arguments, the above result is also valid
for weak solutions.
References
[1] D. Andrade, J. E. Muñoz Rivera, A Boundary Condition with memory in elasticity. Appl.
Math Letters, v.13, 115-121, 2000.
[2] D. Andrade, J. E. Muñoz Rivera, Exponential Decay of Nonlinear Wave Equation with a
Viscoelastic Boundary Condition. Mathematical Methods in The Applied Sciences, v.23, 4161, 2000.
[3] M.M. Cavalcanti, V.N.D. Cavalcanti, J.S. Prates, J.A. Soriano; Existence and uniform decay
of solutions of a degenerate equation with nonlinear boundary damping and boundary memory
source term. Nonlinear Analysis Vol. 38(1), 281- 294, 1999.
[4] F. Conrad, B. Rao; Decay of solutions of the wave equation in a star-shaped domain with
non linear boundary feedback. Asymptotic Analysis Vol. 7(1), 159- 177, 1993.
[5] C. M. Dafermos; An abstract Volterra equation with application to linear viscoelasticity. J.
Differential Equations 7, 554-589, 1970.
[6] G. Dassios & F. Zafiropoulos; Equipartition of energy in linearized 3-d viscoelasticity, Quart.
Appl. Math. 48,715-730, 1990.
[7] J. M. Greenberg & Li Tatsien; The effect of the boundary damping for the quasilinear wave
equation. Journal of Differential Equations 52, 66-75, 1984.
[8] Greenberg J.M. and Li Tatsien; The effect of the boundary damping for the quasilinear wave
equation. Journal of Differential Equations Vol. 52(1), 66- 75, 1984.
[9] A. Haraux & E. Zuazua; Decay estimates for some semilinear damped hyperbolic problems.
Archive for Rational Mechanics and Analysis, Vol. 100(2), 191- 206, 1988.
[10] O. A. Ladyzhenskaya and N. N. Ural’tseva; Linear and Quasilinear Elliptic Equations, Academic Press, New York, 1968.
[11] I. Lasiecka; Global uniform decay rates for the solution to the wave equation with nonlinear
boundary conditions, Applicable Analysis 47, 191-212, 1992.
16
D. ANDRADE, L. HARUE FATORI, J. E. MUÑOZ RIVERA
EJDE-2006/53
[12] J. L. Lions; Controlabilité Exacte, Perturbations et Stabilisation de Systèmes Distribus, Tome
1, Masson, Paris, 1988.
[13] J. L. Lions; Quelques méthodes de rèsolution des problèmes aux limites non linèaires, Dunod
Gaulthier-Villars, Paris, 1969.
[14] K. Liu & Z. Liu; Exponential decay of the energy of the Euler Bernoulli beam with locally
distributed Kelvin-Void. SIAM Control and Optimization 36, 1086-1098, 1998.
[15] Weijiu Liu and G. Williams; The exponential stability of the problem of transmission of the
wave equation. Bull. Austral. Math. Soc. Vol. 57(1), 305- 327, 1998.
[16] M. Nakao; Decay of solutions of the wave equation with a local nonlinear dissipation. Mathematisched Annalen 305, 403-417, 1996.
[17] M. Nakao; Decay of solutions of the wave equation with a local degenerate dissipation. Israel
Journal of Mathematics 95, 25-42, 1996.
[18] M. Nakao; On the decay of solutions of the wave equation with a local time-dependent nonlinear dissipation. Advances in Mathematical Science and Applications 7, 317- 331, 1997.
[19] M. Nakao; Decay of solutions of the wave equation with a local nonlinear dissipation. Mathematische Annalen Vol. 305(1), 403- 417, 1996.
[20] K. Ono; A stretched string equation with a boundary dissipation. Kyushu J. Maths. 28, 265281, 1994.
[21] K. Ono; A stretched string equation with a boundary dissipation. Kyushu J. of Math. Vol.
28(2), 265- 281, 1994.
[22] J. E. Muñoz Rivera; Asymptotic behaviour in linear viscoelasticity. Quart. Appl. Math. 52,
629-648, 1994.
[23] J. E. Muñoz Rivera; Global smooth solution for the Cauchy problem in nonlinear viscoelasticity. Diff. Integral Equations 7, 257-273, 1994.
[24] J. E. Muñoz Rivera & M. L. Oliveira; Stability in inhomogeneous and anisotropic thermoelasticity. Bollettino U.M.I. 7 (11A), 115-127, 1997.
[25] J. E. Muñoz Rivera and Alfonso Peres Salvatierra; Decay of the energy to partially viscoelastic
materials. Mathematical models and methods for smart materials, Ser. Adv. Math. Appl. Sci.,
62, 297–311, 2002.
[26] J. E. Muñoz Rivera and Higidio Portillo Oquendo; The transmission problem of viscoelastic
waves. Acta Aplicandae Mathematicae Vol. 60(1), 1-21, 2000.
[27] J. E. Muñoz Rivera and M. To Fu; Exponential stability of a transmission problem. To appear.
[28] J. E. Muñoz Rivera and R. Racke; Magneto-thermo-elasticity—large-time behavior for linear
systems. Adv. Differential Equations, 6 (3), 359–384, 2001.
[29] Shen Weixi and Zheng Songmu; Global smooth solution to the system of one dimensional
Thermoelasticity with dissipation boundary condition. Chin. Ann. of Math. Vol. 7B(3), 303317, 1986.
[30] M. Tucsnak; Boundary stabilization for the stretched string equation. Differential and Integral
Equation Vol. 6(4), 925- 935, 1993.
[31] A. Wyler; Stability of wave equations with dissipative boundary conditions in a bounded
domain. Differential and Integral Equations Vol. 7(2), 345- 366, 1994.
[32] Zhang Xu; Explicit observability inequalities for the wave equation with lower order terms
by means of Carleman inequalities. SIAM Journal of Control and Optimization Vol. 39(3),
812- 834, 2000.
[33] E. Zuazua; Exponential decay for the semilinear wave equation with locally distribuited damping. Communication in PDE Vol. 15(1), 205- 235, 1990.
Doherty Andrade
Maringá State University, Departament of Mathematics, 87020-900 - Maringá, Brazil
E-mail address: doherty@uem.br
Luci H. Fatori
Londrina State University, Departament of Mathematics, 86051-990 - Londrina, Brazil
E-mail address: lucifatori@uel.br
Jaime E. Munõz Rivera
Laboratório Nacional de Computação Cientı́fica, Av. Getúlio Vargas, 333, 25651-070 Petrópolis, Brazil
E-mail address: rivera@lncc.br