Electronic Journal of Differential Equations, Vol. 2007(2007), No. 51, pp.... ISSN: 1072-6691. URL: or
advertisement
, No. 51, pp.... ISSN: 1072-6691. URL: or")
Electronic Journal of Differential Equations, Vol. 2007(2007), No. 51, pp. 1–14.
ISSN: 1072-6691. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu
ftp ejde.math.txstate.edu (login: ftp)
REGULARIZATION OF A DISCRETE BACKWARD PROBLEM
USING COEFFICIENTS OF TRUNCATED LAGRANGE
POLYNOMIALS
DUC TRONG DANG, NGOC LIEN TRAN
Abstract. We consider the problem of finding the initial temperature u(x, 0),
from a countable set of measured values {u(xj , 1)}. The problem is severely
ill-posed and a regularization is in order. Using the Hermite polynomials and
coefficients of truncated Lagrange polynomials, we shall change the problem
into an analytic interpolation problem and give explicitly a stable approximation. Error estimates and some numerical examples are given.
1. Introduction
Let u = u(x, t) represent a temperature distribution satisfying the heat equation
ut − ∆u = 0 (x, t) ∈ R × (0, 1).
(1.1)
The backward problem is of finding the initial temperature u(x, 0) from the final
temperature u(x, T ). For simplicity, we shall assume that T = 1. This is an ill-posed
problem and has a long history [3]. This problem has been considered by many
authors, using different approaches. The problem was studied intensively by the
semi-group method associated with the quasi-reversibility method and the quasiboundary value method; see for example [1, 2, 5, 7, 15, 22, 23, 12, 16, 13, 9, 26].
Using the Green function, we can transform the heat equation into
Z ∞
(x−ξ)2
1
u(ξ, 0)e− 4t dξ, x ∈ R, t > 0.
u(x, t) = √
2 πt −∞
Hence
Z ∞
2
1
√
u(2ξ, 0)e−(x−ξ) dξ = u(2x, 1).
π −∞
In this form, we can consider the backward problem as the inversion Gaussian
convolution (or Weierstrass transform) problem of finding u(2x, 0) from its image
u(2x, 1). Many inversion formulae for the Gauss transform were given in [18, 19,
20, 21]. In [13], using the reproducing kernel theory, the authors gave analytical
inversion formulas which is optimal in an appropriate sense. In the latter paper, the
case of nonexact L2 -data was studied and some sharp error estimates were given.
2000 Mathematics Subject Classification. 30E05, 33C45, 35K05.
Key words and phrases. Discrete backward problem; truncated Lagrange polynomial;
Hermite polynomial; interpolation problem.
c
2007
Texas State University - San Marcos.
Submitted December 30, 2006. Published April 5, 2007.
1
2
D. T. DANG, N. L. TRAN
EJDE-2007/51
Very recently, in [14], using the Paley-Wiener space and sinc approximation, the
authors established a powerful practical numerical and analytical inversion formulas
for the Gaussian convolution that is realized by computers. In [6, 27], the inversion
Weierstrass transform for generalized functions was studied.
In practical situations, we get temperature measurements only at a discrete set
of points, i.e.
u(xj , 1) = µj .
(1.2)
So, the problem of finding the initial temperature from discrete final values is
necessary. In this case, the problem is severely ill-posed. Hence, a regularization
is in order. However, the literature on this direction is very scarce. In [17], the
authors used the shifted-Legendre polynomial to regularize a discrete form of the
backward problem on the plane. However, the assumption that the temperature
2
2 α(x,y)
u(x, y) is of order e−(x +y )
(limx,y→−∞ α(x, y) = +∞) is very restrictive. In
the present paper, the condition is removed completely.
As discussed, in the present paper, we shall consider a discrete form of the
inversion problem for the Weierstrass transform
Z ∞
xj
2
1
v(ξ)e−( 2 −ξ) dξ = µj .
(1.3)
W v(xj ) ≡ √
π −∞
where v(ξ) = u(2ξ, 0). For the rest of this paper, we shall denote by W v the
sequence (W v(xj )).
Before going to the content of our paper, we shall give some definitions. In this
paper, we denote
2
L2ρ (R) = {f : R → R : f is Lebesgue measurable and e−x
/2
f ∈ L2 (R)}.
The latter space is a Hilbert space with the norm
Z ∞
1/2
2
kf k =
|f (x)|2 e−x dx
−∞
and the inner product
Z
∞
hf, gi =
2
f (x)g(x)e−x dx,
for f, g ∈ L2ρ (R).
−∞
We also denote
`∞ = {µ = (µj ) : µj ∈ R, sup |µj | < ∞}
j
with the norm kµk∞ = supj |µj |.
For R > 0,we denote BR = {z ∈ C : |z| < R} and CR = {z ∈ C : |z| = R}. We
also denote by H 1 (BR ) the Hardy space of functions
ψ(z) =
∞
X
αn z n
n=0
analytic on the disc BR with the norm
kψk2H 1 (BR ) =
∞
X
|αn Rn |2 < ∞.
n=0
Using the Parseval equality, we can rewrite the latter norm in another form
Z 2π
1
2
|ψ(Reiθ )|2 dθ.
kψkH 1 (BR ) =
2π 0
EJDE-2007/51
REGULARIZATION OF A DISCRETE BACKWARD PROBLEM
3
If |ψ(Reiθ )| ≤ M for every θ ∈ [0, 2π] then the latter equality gives
kψk2H 1 (BR ) ≤ M.
Let v be an exact solution of (1.3), we recall that a sequence of linear operator
Tn : `∞ → L2ρ (R) is a regularization sequence (or a regularizer) of Problem (1.3) if
(Tn ) satisfies two following conditions (see, [10])
(R1) For each n, Tn is bounded,
(R2) limn→∞ kTn (W v) − vk = 0.
The number “n” is called the regularization parameter. From (R1), (R2), we can
obtain
(R3) For > 0, there exists the functions n() and δ() such that lim→0 n() =
∞, lim→0 δ() = 0 and that
kTn() (µ) − vk ≤ δ()
for every µ ∈ `∞ such that kµ − W vk∞ < .
The number is the error between the exact data W v and the measured data µ.
For a given error , there are infinitely many ways of choosing the regularization
parameter n(). In the present paper, we give an explicit form of n().
The remainder of the paper is divided into three sections. In Section 2, we shall
transform the problem into an analytic interpolation problem and prove a uniqueness result. In Section 3, we shall find regularization functions by an association
between Hermite polynomials and coefficients of Lagrange polynomials. Finally, in
Section 4, some numerical examples are given.
2. Reformulation of the problem and the uniqueness
Using Hermite polynomials (see [4, P. 65]) we can write
2
e−(z−ξ) =
∞
X
1 −ξ2
e Hn (ξ)z n ,
n!
n=0
where we recall that
dn −ξ2
e ,
dξ n
√ n
hHn , Hm i = δmn π2 n!
Hn (ξ) = (−1)n eξ
2
where δmn = 0 when n 6= m and δnn = 1. We shall find a sequence (an ) such that
v(ξ) = u(2ξ, 0) =
∞
X
an Hn (ξ)
n=0
satisfies (1.3). From the orthogonality of {Hn } in the space L2ρ (R) ,we can substitute
the latter expansion into (1.3) to get
µj =
∞
X
an xnj .
n=0
Now, if we put
φ(v)(z) =
∞
X
n=0
an z n ,
(2.1)
4
D. T. DANG, N. L. TRAN
EJDE-2007/51
then we have
φ(v)(xj ) = µj .
(2.2)
Hence, the problem is reformulated to the classical one of finding the sequence (an )
(and of constructing a function v) from the prescribed values (µj ) such that φ(v)(z)
satisfies (2.2). We first give some properties of the function φ(v).
Lemma 2.1. Let v(x) = u(2x, 0) be in L2ρ (R). If v has the expansion
v(ξ) =
∞
X
an Hn (ξ)
n=0
then
∞
√ X
π
|an |2 2n n! < ∞
(2.3)
n=0
and that the function φ(v)(.) is an entire function of order ρ ≤ 2. Here we recall
that the order of an entire function f is the number
ρ = lim sup
r→∞
ln ln Mf (r)
ln r
where Mf (r) = max|z|=r |f (z)|.
√
Proof. As mentioned before, hHn , Hm i = δmn π2n n! where δmn = 0 for m 6= n
and δmm = 1. Since
∞
X
v(ξ) =
an Hn (ξ)
n=0
we get
∞
√ X
|an |2 2n n! = kvk2 < ∞.
π
(2.4)
n=0
Now we prove that φ(v) is an entire function. In fact, we consider the power series
φ(v)(z) =
∞
X
an z n .
n=0
From (2.4), one has
|an |2 ≤
kvk2
.
2n n!
It follows that
lim
n→∞
p
n
|an | = 0.
Hence, the power series has the convergent radius R = ∞, i.e., φ is an entire
function. Now, we estimate the order of the entire function φ. We note that the
order ρ of φ can be calculated by the following formula (see [11, P. 6])
ρ = lim sup
n→∞
n ln n
.
ln(1/|an |)
From (2.4), one has
1/|an |2 ≥ C2n n!
where C = kvk−2 . On the other hand, we have the Stirling formula (see [24, P.
688])
√
n! = 2πnnn e−n eθn ,
EJDE-2007/51
REGULARIZATION OF A DISCRETE BACKWARD PROBLEM
5
where
1
1
≤ θn ≤
.
12(n + 1)
12(n − 1)
Hence
2n n! ≥
√
2πn(2/e)n nn .
It follows that
ln(1/|an |2 ) ≥ C1 (1 + ln ln n + n ln(2/e)) + n ln n
where C1 is a generic constant. Hence
ρ = lim sup
n→∞
2n ln n
2n ln n
≤ lim sup
= 2.
ln(1/|an |2 )
C
(ln
ln
n
+
n ln(2/e)) + n ln n
n→∞
1
This completes the proof of Lemma 2.1.
Now we have a uniqueness result.
Theorem 2.2. Let δ > 0. If
∞
X
1
=∞
2+δ
|x
n|
n=1
then Problem (1.3) has at most one solution v ∈ L2ρ (R).
The latter condition means that the sequence (xn ) has an accumulation point on
the extended real axis R ∪ {±∞}. Moreover, if the accumulation point is ∞ then
the sequence (xn ) has to be “dense enough” near ∞.
Proof. Let v1 , v2 ∈ L2ρ (R) be two solutions of (1.3). Putting v = v1 − v2 and
P∞
assuming that v = n=1 an Hn , we shall get as in the beginning of Section 2
φ(v)(xj ) = 0,
j = 1, 2, . . .
P∞
where φ(v) = n=1 an z n . It follows that xj ’s are zeroes of the entire function φ. If
xj ’s has a finite accumulation point then the identity theorem shows that φ(v) ≡ 0.
If xj ’s do not have any finite accumulation points, we can assume, without loss of
generality, that |x1 | ≤ |x2 | < . . . . and limj→∞ |xj | = ∞. Since the order of φ(v) is
≤ 2, we get (see [11, P. 18])
inf λ|
∞
X
1
< ∞ ≤ ρ ≤ 2.
λ
|x
|
n
n=1
It follows that
∞
X
1
<∞
2+δ
|x
n|
n=1
which is a contradiction. Hence, in either cases, we have φ(v) ≡ 0. It follows that
an = 0, n = 1, 2, . . . . This completes the proof.
6
D. T. DANG, N. L. TRAN
EJDE-2007/51
3. Regularization and error estimate
For the rest of this article, we shall assume that there exists an R > 0 such that
supj |xj | < R. Put ωn (z) = (z − x0 ) . . . (z − xn ) and µ = (µj ) ∈ `∞ . We denote by
Ln (µ) the Lagrange polynomial of degree (at most) n,i.e.,
n
X
ωn (z)
Ln (µ)(z) =
µj 0
ω
(x
n j )(z − xj )
j=0
(n)
which satisfies Ln (µ)(xj ) = µj . Now, we denote by lj (µ) the coefficient of z j in
the expansion of the Lagrange polynomial Ln (µ), i.e.
n
X
(n)
Ln (z)(µ) =
lj (µ)z j .
(3.1)
j=0
We shall construct a regularization sequence. We denote by k0n the greatest integer
satisfying
3
> (2k0n + 1) ln k0n .
(3.2)
n ln
2
We can verify easily that limn→∞ k0n = ∞. We choose a sequence (kn ) such that
0 < kn ≤ k0n ,
lim kn = ∞.
n→∞
(3.3)
For each n, we shall approximate the function v(x) = u(2x, 0) by the function
Tn (µ)(x) =
kn
X
(n)
lj (µ)Hj (x).
(3.4)
j=0
We shall verify that Tn is a regularization sequence. We first note that Tn : `∞ →
L2ρ (R) is bounded, i.e., Condition (R1) (in Section 1) holds. In Theorem 3.1 below,
we shall prove that (Tn ) satisfies (R2) and, in Theorem 3.6, we shall prove that
(Tn ) satisfies (R3). In fact, we get the following regularization result for the case
of exact data.
Theorem 3.1. Let (kn ) be as in (3.3), let R ≥ 1 and let v ∈ L2ρ (R) be as in
Theorem 2.2. Put Fn = Tn (W v). Then kv − Fn k → 0 as n → ∞. Moreover, if
v 0 ∈ L2ρ (R) then we can find an n0 such that
2 2 n
1 0 2
kv − Fn k2 ≤ kvk2 e8R
+
kv k
for n ≥ n0 .
3
kn
If we choose kn = k0n , n = 1, 2, . . . . then the latter inequality can be rewritten as
follows
2 2 n
1
kv − Fn k2 ≤ kvk2 e8R
+ √ kv 0 k2 for n ≥ n0 .
3
n
Before proving this theorem, some remarks are in order. We note that the
coefficients of z j (j ≥ kn + 1) in the expansion of the Lagrange polynomial (3.1) are
truncated in (3.4). If we use coefficients of z j ’s (for j large) of Ln in (3.4) then we
shall get functions which are unstable approximation of v. To illustrate the latter
fact, in Section 4, we shall give a numerical example. In fact, we can say that the
polynomial
kn
X
(n)
Lnkn (z) =
lj z j
j=0
EJDE-2007/51
REGULARIZATION OF A DISCRETE BACKWARD PROBLEM
7
is a truncated Lagrange polynomial (see [25] for a similar definition). Hence, our
method of regularization is of using the coefficients of truncated Lagrange polyno(n)
mials. We shall give an estimate for lj and the proof of Theorem 3.1. To this
end, some lemmas will be established.
Lemma 3.2. Let v, φ(v) be as in Lemma 2.1. Then φ : L2ρ (R) → H 1 (BR ) is a
bounded linear operator satisfying
kφ(v)k2H 1 (BR ) ≤ eR
2
/2
kvk2 .
Proof. We have
kφ(v)k2H 1 (BR ) =
∞
X
|an |2 R2n ≤
n=0
≤ kvk2
= eR
This completes the proof
2
∞
√ X
R2n
π
|an |2 n2n n! n
n2 n!
n=0
∞
X
R2n
2n n!
n=0
/2
kvk2 .
Lemma 3.3. Let v, φ(v) and (an ) be as in Lemma 2.1. Assume that (xj ) is in the
disc BR . Then one has
∞
n
X
X
1 2 2n 8R2
(n)
R2j |aj |2 ≤
R2j |aj − lj |2 +
e kvk2 .
9
3
j=n+1
j=0
Proof. In the present proof, we shall denote φ(v) by φ. We have the Hermitian
representation (see [8, P. 58])
Z
ωn (z) φ(t)
1
.
dt.
φ(z) − Ln (z) =
2πi C4R ωn (t) t − z
Now, for every t ∈ C4R one has |ωn (t)| ≥ (3R)n . On the other hand, one has for
every |z| ≤ R
|ωn (z)| ≤ (2R)n .
We claim that
1 2 n
kφ − Ln kH 1 (BR ) ≤
kφkH 1 (B4R ) .
3 3
In fact, we have for |z| = R, t = 4Reiθ
Z 2π
1
(2R)n |φ(4Reiθ )|
|φ(z) − Ln (z)| ≤
Rdθ
.
2π 0 (3R)n 4R − R
Z 2π
1 2 n 1
≤
|φ(4Reiθ )|dθ
3 3 2π 0
Z 2π
1/2
1 2 n 1
|φ(4Reiθ )|2 dθ
≤
3 3
2π 0
1 2 n
=
kφkH 1 (B4R ) .
3 3
It follows that
Z 2π
1
1 2 2n
2
|φ(Reiθ ) − Ln (Reiθ )|2 dθ ≤
kφk2H 1 (B4R )
kφ − Ln kH 1 (BR ) =
2π 0
9 3
8
D. T. DANG, N. L. TRAN
EJDE-2007/51
as claimed. In view of Lemma 3.2, it follows that
n
∞
X
X
1 2 2n 8R2
(n)
e kvk2 .
R2j |aj − lj |2 +
R2j |aj |2 ≤
9
3
j=0
j=n+1
This completes the proof.
Lemma 3.4. Let f ∈ L2ρ (R) satisfy f 0 ∈ L2ρ (R) and f =
∞
X
P∞
n=0 cn Hn
Then we have
√
2nc2n π2n n! = kf 0 k2 .
n=0
Proof. We note that Hn satisfies the differential equation
y” − 2xy 0 + 2ny = 0,
(see [4, P. 66]). It follows that Hn satisfies
2
2
(e−x y 0 )0 + 2nye−x = 0.
Hence we have
2
(e−x f 0 )0 =
∞
X
2
cn (e−x Hn0 )0 =
n=0
∞
X
2
−2ncn Hn e−x .
n=0
2
Hence, taking the inner product in L (R) with respect Hn , we get in view of the
orthogonality
Z ∞
√
2
e−x f 0 (x)cn Hn0 (x)dx = 2nc2n π2n n!.
−∞
It follows that
Z
∞
2
e−x f 0 (x)f 0 (x)dx =
−∞
∞
X
√
2nc2n π2n n!.
n=0
This completes the proof.
Lemma 3.5. For (k0n ) as in (3.2), there exist a0 , n0 > 0 such that
3 n √
≥ πj!2j for 0 ≤ j ≤ k0n
2
√
for every n > a0 and that k0n ≥ n for every n > n0 .
Proof. For every k > 4π 2 e2 , we have
√
1
k
ln 2πe k (2ek) = ln(2πe) + ln k + k(1 + ln 2 + ln k)
2
1
≤ ln(2πe) + k(1 + ln 2) + ln k + k ln k
2
≤ (2k + 1) ln k ≡ g(k)
For every n > a0 = g(576) ln−1 23 , one has in view of the definition of k0n that
k0n ≥ 576 > 4π 2 e2 . Hence, we have for n > a0
p
k
(2k0n + 1) ln k0n ≥ ln 2πe k0n (2ek0n ) 0n .
Now, since k0n satisfies
n ln
3
> (2k0n + 1) ln k0n ,
2
EJDE-2007/51
REGULARIZATION OF A DISCRETE BACKWARD PROBLEM
9
we have for n > a0
p
3
k
> ln 2πe k0n (2ek0n ) 0n .
2
Using Stirling formula we get
p
√
k
πk0n !2k0n ≤ 2πe k0n (2ek0n ) 0n .
n ln
It follows that
p
√
3 n
k
> 2πe k0n (2ek0n ) 0n ≥ πk0n !2k0n .
2
Since
3
> (2k0n + 1) ln k0n
2
(2k0n + 3) ln(k0n + 1) ≥ n ln
one has k0n → ∞ as n → ∞ and that
n ln 23
lim
= 2.
n→∞ k0n ln k0n
It follows that
√
n
2k0n ln k0n
= lim √
.
= 0.
lim
n→∞
n→∞ k0n
k0n
2k0n ln k0n
√
Hence, we can find an n0 > a0 such that k0n ≥ n for every n ≥ n0 . This completes
the proof.
√
√
n
Proof of Theorem 3.1. For R ≥ 1, it follows in view of the orthogonality of (Hn )
that
kv − Fn k2 =
kn
X
∞
X
√
(n) √
|an |2 πj!2j
|aj − lj |2 πj!2j +
j=0
=
kn
X
j=kn +1
√
(n)
R2j |aj − lj |2
j=0
≤
kn
X
∞
X
√
πj!2j
+
|aj |2 πj!2j
2j
R
j=kn +1
∞
X
√
(n) √
R2j |aj − lj |2 πj!2j +
|aj |2 πj!2j .
j=0
j=kn +1
Using Lemma 3.3, we have
kv − Fn k2 ≤ kvk2 e8R
2
∞
X
√
1 2 2n √
πkn !2kn +
|aj |2 πj!2j .
9 3
j=kn +1
In view of Lemma 3.5,
kv − Fn k2 ≤ kvk2 e8R
2
∞
X
√
2 n
+
|aj |2 πj!2j .
3
j=kn +1
Using Lemma 2.1, one gets
lim
n→∞
∞
X
√
|aj |2 πj!2j = 0.
j=kn +1
It follows that
lim kv − Fn k = 0.
n→∞
10
D. T. DANG, N. L. TRAN
EJDE-2007/51
Now, if v 0 ∈ L2ρ (R) then we get in view of Lemma 3.4
∞
X
j=kn +1
√
1 0 2
|aj |2 πj!2j ≤
kv k ,
kn
which gives
1 0 2
2 n
+
kv k .
3
kn
This proves√the first estimate of Theorem 3.1. Now if kn = k0n then Lemma 3.5
gives kn ≥ n for n ≥ n0 . Hence
2 n
1
kv − Fn k2 ≤ kvk2
+ √ kv 0 k2 .
3
n
kv − Fn k2 ≤ kvk2
This completes the proof.
Now, we consider the case of nonexact data. Let > 0 and let µ =
nonexact data of (W v(xj )) = (u(xj , 1)) satisfying
(µj )
be a
sup |u(xj , 1) − µj | < .
j
We first put
Dm = max
1≤n≤m
max |z|≤R
ωm (z)
0 (x )
(z − xn )ωm
n
and
Fn = Tn (µ ) =
kn
X
(n)
lj Hj ,
j=0
where
(n)
lj
is the coefficient of z j in the expansion of the Lagrange polynomial
Ln =
n
X
µj
j=0
ωn (z)
.
ωn0 (zj )(z − zj )
Let ψ be an increasing function such that
3 n/2
, lim ψ(x) = ∞
ψ(n) ≥ (n + 1)Dn
x→∞
2
and
1
n() = [ψ −1 (− 2 )] + 1
where [x] is the greatest integer ≤ x. Using the latter function, we shall prove that
(Tn ) satisfies the condition (R3).
Theorem 3.6. Let R > 1 and let v ∈ L2ρ (R). Let > 0 and let (µj ) be a measured
data of (u(xj , 1)) satisfying
sup |u(xj , 1) − µj | < .
j
Then
k ≤ δ() = kv − Fn() k +
kv − Fn()
√
.
Moreover, if v 0 ∈ L2ρ (R) then
kv − Fn()
k2 ≤ 2kvk2
2 n()
2
+
kv 0 k2 + 2.
3
kn()
EJDE-2007/51
REGULARIZATION OF A DISCRETE BACKWARD PROBLEM
11
In the latter inequality, if kn = k0n then there exists an 0 > 0 such that
2 n()
2
kv − Fn()
k2 ≤ 2kvk2
+p
kv 0 k2 + 2.
3
n()
for 0 < < 0 .
Proof. We first claim that
kFn − Fn k ≤ (n + 1)
3 n/2
Dn .
2
In view of Lemma 3.5,
kFn − Fn k2 =
kn
X
(n)
|lj
(n) √
− lj |2 πj!2j
j=0
=
kn
X
√
(n)
R2j |lj
(n)
− lj |2
j=0
πj!2j
R2j
kn
3 n X
(n)
(n)
≤
R2j |lj − lj |2 .
2 j=0
Hence
3 n
kLn − Ln k2H 1 (BR ) .
2
kFn − Fn k2 ≤
(3.5)
On the other hand
Ln (z) − Ln (z) =
n
X
(µj − µj )
j=0
ωn (z)
.
ωn0 (xj )(z − xj )
It follows that
kLn − Ln kH 1 (B1R ) ≤
n
X
|µj − µj |Dn ≤ (n + 1)Dn .
j=0
So that
kFn − Fn k ≤ (n + 1)
3 n/2
Dn .
2
Now, we have
kv − Fn k ≤ kv − Fn k + kFn − Fn k.
Hence
3 n/2
.
2
For n = n(), we get in view of the definition of n() that
√
kv − Fn()
k ≤ kv − Fn() k + .
kv − Fn k ≤ kv − Fn k + (n + 1)Dn
Since n() → ∞ as → 0, we can get from Theorem 3.1 and the latter inequality
that
lim kv − Fn()
k = 0.
→0
Now if v 0 ∈ L2ρ (R), Theorem 3.1 and (3.5) give
kv − Fn k2 ≤ 2kvk2
2 n
2 0 2
3 n
+
kv k + 2(n + 1)2 2 Dn2
.
3
kn
2
12
D. T. DANG, N. L. TRAN
EJDE-2007/51
From the definition of n(), one has
kv − Fn()
k2 ≤ 2kvk2
2 n()
2
kv 0 k2 + 2.
+
3
kn()
Finally, p
if kn = k0n then Lemma 3.5 shows that, there exists an 0 > 0 such that
kn() ≥ n() for every 0 < < 0 . Hence, we shall get the desired estimate. This
completes the proof.
4. Numerical examples
We shall give two numerical examples. In the first example, we consider xj =
j = 0, 1, . . . , 100. We choose the exact function v(ξ) = 1 and the nonexact data µj = 1 + 2.10201(j+1) . From the latter data, we can calculate (using MAPLE) the first six coefficients of the corresponding Lagrange polynomial
(100) (100) (100) (100) (100) (100)
[l0 , l1 , l2 , l3 , l4 , l5 ] which are
1
1+j ,
s := [1 + 2575.000000 × 10−20 , −6.546062500 × 10−14 , 1.094478041 × 10−10 ,
− 1.354054633 × 10−7 , 1.322015356 × 10−4 , −1.060903238 × 10−1 ].
Using the first five coefficients of the corresponding Lagrange polynomial, we get
P4
(100)
the approximation F1 = j=0 lj
Hj of v
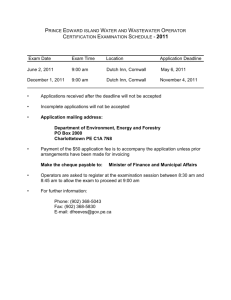
F1 := 1.001586418 + 0.000001624865429x − 0.006345673271x2
− 0.000001083243706x3 + 0.002115224570x4 .
We have
Z
20
2
|F1 (x) − v(x)|e−x dx ' 0.003448971524.
−20
We have the graphs of two functions v and F1 . The approximation is very good in
the interval [−2, 2].
2
1.8
1.6
1.4
1.2
1
-4
-2
0
2
4
x
Figure 1. the graphs of v and F1 on [−4, 4]
EJDE-2007/51
REGULARIZATION OF A DISCRETE BACKWARD PROBLEM
13
If we use the first six coefficients of the Lagrange polynomial, we get the approxP5
(100)
imation F2 = j=0 lj
Hj of v
F2 := 1.001586418 − 12.73083724x − 0.006345673271x2
+ 16.97445073x3 + 0.002115224570x4 − 3.394890362x5 .
We have
Z
20
2
|F2 (x) − v(x)|e−x dx ' 8.752434897.
−20
In this case, we can see that the error is larger than the foregoing case.
1
, j = 0, 1, . . . , 140. We choose the
In the second example, we consider xj = 1+j
1
exact function v(ξ) = 1, µj = 1+ 2.1020 (j+1) . ¿From the latter data, we can calculate
(140)
the first six coefficients of Lagrange polynomial [l0
which are
(140)
, l1
(140)
, l2
(140)
, l3
(140)
, l4
(140)
, l5
]
s := [1 + 5005.000000 × 10−20 , −2.481893750 × 10−13 , 8.126181478 × 10−10 ,
− 0.1976424306 × 10−5 , 0.3808576622 × 10−2 , −6.056645660].
Using the first five coefficients of the corresponding Lagrange polynomial, we get
P4
(140)
the approximation F3 = j=0 lj
Hj of v
F3 := 1.045702918 + 0.00002371709117x − 0.1828116746x2
− 0.00001581139445x3 + 0.06093722595x4 .
We have
Z
20
2
|F3 (x) − v(x)|e−x dx ' 0.09936096138.
−20
On the other hand, if we use the first six coefficients of the Lagrange polynomial,
P5
(140)
we have the function F4 = j=0 lj
Hj
F4 := 1.045702918 − 726.7974555x − 0.1828116746x2 + 969.0632898x3
+ 0.06093722595x4 − 193.8126611x5 .
We have an error estimate
Z 20
2
|F4 (x) − v(x)|e−x dx ' 499.6722779.
−20
This case shows that the error is very large if we use too many coefficients of the
Lagrange polynomial.
Acknowledgments. The authors would like to thank the referees for their valuable criticisms leading to the improved version of our paper.
References
[1] K.A. Ames, R. J. Hughes; Structural stability for ill-posed problems in Banach spaces, Semigroup Forum, 70, 2005, pp. 127-145.
[2] S. M. Alekseeva, N. I. Yurchuk; The quasi-reversibility method for the problem of the control
of an initial condition for the heat equation with an integral boundary condition, Differential
Equations 34, no. 4, 1998, pp. 493-500.
[3] J. V. Beck, B. Blackwell, C. R. St. Clair; Inverse heat conduction, Ill-posed problems, Wiley,New York- Chichester, 1985.
[4] P. Borwein, T. Erdelyi; Polynomials and polynomial inequalities, Springer-Verlag, New York
Inc., 1995.
14
D. T. DANG, N. L. TRAN
EJDE-2007/51
[5] G. Clark, C. Oppenheimer; Quasireversibility Methods for Non-Well-Posed Problem, Electronic Journal of Differential Equations, Vol. 1994, no. 08, 1994, pp. 1-9.
[6] Z. Ditzian; Inversion of the Weierstrass transformation for generalized functions, J. Math.
Anal. Appl. 32, 1970, 644-650.
[7] M. Denche, K. Bessila; A modified quasi-boundary value method for ill-posed problems, J.
Math. Anal. Appl, Vol. 301, 2005, pp. 419-426.
[8] D. Gaier; Lectures on Complex Approximation, Birkhauser, Boston-Basel-Stuttgart, 1987
[9] H. Gajewski, K. Zacharias; Zur Regularizierung einer Klasse nichkorrecter probleme bei
Evolutionsgleichungen, J. Math. Anal. Appl. 38, 1972, pp. 784-789.
[10] V. Isakov; Inverse problems for partial differential equations, Springer-Verlag, New York Inc.,
1998.
[11] B. Ya. Levin; Lectures on entire functions, AMS, Providence Island (1996).
[12] R. Lattes, J. L. Lions; Méthode de Quasi-Reversibilité et Applications, Dunod, Paris, 1967.
[13] T. Matsuura, S. Saitoh, D. D. Trong; Approximate and analytical inversion formulas in heat
conduction on multidimensional spaces, J. of Inverse and Ill-posed Problems, 13,2005, pp.
479-493.
[14] T. Matsuura, S. Saitoh; Analytical and numerical inversion formulas in the Gaussian convolution by using the Paley-Wiener spaces, Applicable Analysis, Vol. 85, No. 8, 2006, 901-915.
[15] K. Miller; Stabilized quasi-reversibility and other nearly-best-possible methods for non-wellposed problems, Symposium on Non-Well-posed Problems and Logarithmic Convexity, Lecture Notes in Math., Vol. 316, Springer-Verlag, Berlin, 1973, pp. 161-176.
[16] L. E. Payne; Some general remarks on improperly posed problems for partial differential equation, Symposium on Non-Well-posed Problems and Logarithmic Convexity, Lecture Notes in
Math., Vol. 316, Springer-Verlag, Berlin , 1973, pp. 1-30.
[17] P. H. Quan, T. N. Lien and D. D. Trong, A discrete form of the backward heat problem on
the plane, International Journal of Evolution Equations, Vol. 1, no. 3, 2005.
[18] P. G. Rooney; On the inversion of the Gauss transform, Cand. Math. Bull. 9, 1957, 459-464.
[19] P. G. Rooney; On the inversion of the Gauss transform II, Cand. Math. Bull. 10, 1958,
613-616.
[20] P. G. Rooney; A generalization of an inversion formula for the Gauss transformation, Cand.
Math. Bull. 6, 1963, 45-53.
[21] S. Saitoh; The Weierstrass transform and an isometry in the heat equation, Applicable
Analysis, Vol. 16, 1983, pp. 1-6.
[22] R. E. Showalter; Quasi-reversibility of first and second order parabolic evolution equations,
Improperly posed boundary value problems (Conf., Univ. New Mexico, Albuquerque, N. M.,
1974), pp. 76-84. Res. Notes in Math., no. 1, Pitman, London, 1975.
[23] R. E. Showalter; The final value problem for evolution equations, J. Math. Anal. Appl., Vol.
47, 1974, pp.563-572.
[24] A. E. Taylor;Advanced calculus, Blaisdell Publishing Company, New York-Toronto-London,
1965.
[25] D. D. Trong, T. N. Lien; Reconstructing an analytic function using truncated Lagrange
polynomials, ZAA, vol 23, No.4, 2003, 925-938.
[26] Ahong Yong, Quanzheng Huang; Regularization for a class of ill-posed Cauchy problems,
Proc. Amer. Math. Soc., Vol. 133, 2005, pp. 3005-3012.
[27] A. H. Zemanian; A generalized Weierstrass transformation, SIAM J. Appl. Math. 10, 1967,
pp. 1088-1105.
Duc Trong Dang
Department of Mathematics and Computer Sciences, Hochiminh City National University, 227 Nguyen Van Cu, Hochiminh City, Vietnam
E-mail address: ddtrong@mathdep.hcmuns.edu.vn
Ngoc Lien Tran
Faculty of Sciences, Cantho University, Cantho, Vietnam
E-mail address: tnlien@ctu.edu.vn