Electronic Journal of Differential Equations, Vol. 2005(2005), No. 20, pp.... ISSN: 1072-6691. URL: or
advertisement
, No. 20, pp.... ISSN: 1072-6691. URL: or")
Electronic Journal of Differential Equations, Vol. 2005(2005), No. 20, pp. 1–10.
ISSN: 1072-6691. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu
ftp ejde.math.txstate.edu (login: ftp)
REMARKS ON A CLASS OF QUASILINEAR ELLIPTIC
SYSTEMS INVOLVING THE (P,Q)-LAPLACIAN
GUOQING ZHANG, XIPING LIU, SANYANG LIU
Abstract. We study the Nehari manifold for a class of quasilinear elliptic
systems involving a pair of (p,q)-Laplacian operators and a parameter. We
prove the existence of a nonnegative nonsemitrivial solution for the systems by
discussing properties of the Nehari manifold, and so global bifurcation results
are obtained. Thanks to Picone’s identity, we also prove a nonexistence result.
1. Introduction
Consider the quasilinear elliptic boundary-value problem
−∆p u = λa(x)|u|p−2 u + λb(x)|u|α−1 |v|β+1 u
+
µ(x)
|u|γ−1 |v|δ+1 u
(α + 1)(δ + 1)
in Ω
−∆q v = λd(x)|v|q−2 v + λb(x)|u|α+1 |v|β−1 v
µ(x)
|u|γ+1 |v|δ−1 v
(β + 1)(γ + 1)
u = 0, v = 0 on ∂Ω ,
+
(1.1)
in Ω
where Ω is a bounded domain in RN with smooth boundary ∂Ω, λ > 0 is a real
parameter, and ∆p u = div(|∇u|p−2 ∇u) is the p-Laplacian operator with 1 < p, q <
N.
Recently, many publications have appeared about semilinear and quaslinear systems which have been used in a great variety of applications. Stavrakakis and
Zographopoulos [8, 9] studied existence and bifurcation results for problem (1.1)
with a(x) = d(x) ≡ 0, using variational approach and global bifurcation theory.
Fleckinger, Manasevich, Stavrakakis and de Thelin [6] and Zographopoulos [11] obtained some properties of the positive principal eigenvalue λ1 for the unperturbed
system
−∆p u = λa(x)|u|p−2 u + λb(x)|u|α−1 |v|β+1 u
q−2
−∆q v = λd(x)|v|
u = 0,
α+1
v + λb(x)|u|
v=0
β−1
|v|
v
in Ω
in Ω
on ∂Ω
2000 Mathematics Subject Classification. 35B32, 35J20,35J50, 35P15.
Key words and phrases. Nehari manifold; (p,q)-Laplacian; variational methods.
c
2005
Texas State University - San Marcos.
Submitted July 16, 2004. Published February 8, 2005.
1
2
G. ZHANG, X. LIU, S. LIU
EJDE-2005/20
Later, under the key condition
Z
µ(x)|u1 |γ+1 |v1 |δ+1 dx < 0,
(1.2)
Ω
where (u1 , v1 ) is the positive normalized eigenfunction corresponding to λ1 , Drabek,
Stavrakakis and Zographopoulos in [5] prove that there exists λ∗ > λ1 such that
Problem (1.1) has two nonnegative nonsemitrival solutions wherever λ ∈ (λ1 , λ∗ ).
i.e. λ = λ1 is a bifurcation point, and bifurcation is to the right when λ > λ1 .
In this paper, under the condition
Z
µ(x)|u1 |γ+1 |v1 |δ+1 dx > 0,
(1.3)
Ω
we prove the existence of a nonnegative nonsemitrival solution for Problem (1.1)
when λ < λ1 . i.e. the bifurcation is to the left. Combining this with the result of [5],
we obtain global bifurcation results for Problem (1.1), for which the corresponding
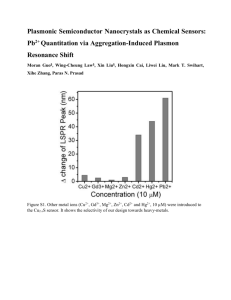
bifurcation diagrams are shown in Fig 1. In addition, a nonexistence result is proved
by using Picone’s identity when λ > λ1 .
k(u, v)kX 6
k(u, v)kX 6
λ
-
λ
0
(a)
Ω
0
λ1
γ+1
R
µ(x)|u1 |
δ+1
|v1 |
dx > 0
b)
λ1
γ+1
R
Ω
µ(x)|u1 |
λ
∗
δ+1
|v1 |
dx < 0
Figure 1. Bifurcation diagrams for Problem (1.1)
This paper is organized as follows. In section 2, we introduce notation, give
some definitions, and state our basic assumptions. Section 3 is devoted to giving a
detailed description of Figure 1 (a). In section 4, we prove a nonexistence result.
R
1.1. Remarks. (1) Figure 1 shows how the sign of Ω µ(x)|u1 |γ+1 |v1 |δ+1 dx determines the direction of bifurcation at the point λ = λ1 .
(2) This paper gives a complete bifurcation result for Problem (1.1) using the arguments developed in Allegretto and Huang [1] and by Brown and Zhang [4].
2. Notation and hypotheses
W01,p
R (Ω)
Let
denote the closure of the space C0∞ (Ω) with respect to the norm
kukp = ( Ω |∇u|p dx)1/p . Let X denote the product space W01,p (Ω) × W01,q (Ω)
equipped with the norm
k(u, v)kX = kukp + kvkq .
Now, we state some assumptions used in this paper.
EJDE-2005/20
QUASILINEAR ELLIPTIC SYSTEMS
3
(H1) Assume that α, β, γ, δ satisfy
α+1 β+1
+
= 1,
p
q
γ+1 δ+1
p < γ + 1 or q < δ + 1,
+ ∗ < 1,
p∗
q
1
1
+
< 1,
(α + 1)(δ + 1) (β + 1)(γ + 1)
p
p
where p∗ = NN−p
, q ∗ = NN−p
are the well-known critical exponents.
(H2) Assume a(x), b(x), d(x) are nonnegative smooth functions such that a(x) ∈
N
N
L p (Ω) ∩ L∞ (Ω), b(x) ∈ Lω1 (Ω) ∩ L∞ (Ω), d(x) ∈ L q (Ω) ∩ L∞ (Ω) and
|Ω+
1 | = |{x ∈ Ω : a(x) > 0}| > 0
|Ω+
2 | = |{x ∈ Ω : d(x) > 0}| > 0 ,
where b(x) 6≡ 0 and ω1 = p∗ q ∗ /[p∗ q ∗ − (α + 1)q ∗ − (β + 1)p∗ ].
(H3) µ(x) is a given smooth function which many change sign, and µ(x) ∈
Lω2 (Ω) ∩ L∞ (Ω), where ω2 = p∗ q ∗ /[p∗ q ∗ − (γ + 1)q ∗ − (δ + 1)p∗ ].
Lemma 2.1 ([1, 10]). There exists a number λ1 > 0 such that
(1)
R
R
( α+1
|∇u|p dx + β+1
|∇v|q dx)
p
q
Ω
Ω
λ1 = inf α+1 R
,
R
R
( p Ω a(x)|u|p dx + β+1
d(x)|v|q dx + Ω b(x)|u|α+1 |v|β+1 dx)
q
Ω
where the infimum is taken over (u, v) ∈ X
(2) There exists a positive function (u1 , v1 ) ∈ X ∩ L∞ (Ω), which is solution of
the system (1.2)
(3) The eigenvalue λ1 is simple in the sense that the eigenfunctions associated
with it are merely a constant multiple of each other
(4) λ1 is isolated, that is, there exists δ > 0 such that in the interval (λ1 , λ1 +δ)
there are no other eigenvalues of the system (1.2).
Definition 2.2. We say that (u, v) ∈ X is a weak solution of Problem (1.1) if for
all (ϕ, ξ) ∈ X,
Z
Z
Z
|∇u|p−2 ∇u∇ϕdx = λ( a(x)|u|p−2 uϕdx +
b(x)|u|α−1 |v|β+1 uϕdx)
Ω
Ω
Ω
Z
1
+
µ(x)|u|γ−1 |v|δ+1 uϕdx
(α + 1)(δ + 1) Ω
Z
Z
Z
|∇v|q−2 ∇v∇ξdx = λ( a(x)|v|p−2 vξdx +
b(x)|u|α+1 |v|β−1 vξdx)
Ω
Ω
Ω
Z
1
+
µ(x)|u|γ+1 |v|δ−1 vξdx .
(β + 1)(γ + 1) Ω
3. The case λ < λ1
It is well known that Problem (1.1) has a variational structure. i.e., weak solutions of Problem (1.1) are critical points of the functional
1
I(u, v) = J(u, v) − λK(u, v) −
M (u, v)
(γ + 1)(δ + 1)
4
G. ZHANG, X. LIU, S. LIU
EJDE-2005/20
where
Z
Z
β+1
α+1
|∇u|p dx +
|∇v|q dx,
p
q
Ω
ZΩ
Z
Z
α+1
β+1
p
K(u, v) =
a(x)|u| dx +
d(x)|v|q dx +
b(x)|u|α+1 |v|β+1 dx,
p
q
Ω
Ω
Ω
Z
M (u, v) =
µ(x)|u|γ+1 |v|δ+1 dx.
J(u, v) =
Ω
Clearly, I(u, v) ∈ C 1 (X, R).
Let Λλ be the Nehari manifold associated with Problem (1.1). i.e.,
Λλ = {(u, v) ∈ X : hI 0 (u, v), (u, v)i = 0}
(3.1)
It is clear that Λλ is closed in X and all critical points of I(u, v) must lie on Λλ .
So, (u, v) ∈ Λλ if and only if
Z
Z
Z
p
p
|∇u| dx − λ
a(x)|u| dx − λ
b(x)|u|α+1 |v|β+1 dx
Ω
Ω
Ω
Z
1
µ(x)|u|γ+1 |v|δ+1 dx
=
(α + 1)(δ + 1) Ω
Z
Z
Z
(3.2)
|∇v|q dx − λ
d(x)|v|q dx − λ
b(x)|u|α+1 |v|β+1 dx
Ω
Ω
Ω
Z
1
=
µ(x)|u|γ+1 |v|δ+1 dx
(β + 1)(γ + 1) Ω
Hence, for (u, v) ∈ Λλ , using
α+1
p
+
β+1
q
= 1, we have
Z
1
1
1
+
−
)
µ(x)|u|γ+1 |v|δ+1 dx
I(u, v) = (
p(δ + 1) q(γ + 1) (γ + 1)(δ + 1) Ω
(3.3)
Now, we define the following disjoint subsets of Λλ :
Z
Λ+
=
{(u,
v)
∈
Λ
:
µ(x)|u|λ+1 |v|δ+1 dx < 0}
λ
λ
Ω
Z
0
Λλ = {(u, v) ∈ Λλ :
µ(x)|u|λ+1 |v|δ+1 dx = 0}
Ω
Z
Λ−
=
{(u,
v)
∈
Λ
:
µ(x)|u|λ+1 |v|δ+1 dx > 0}
λ
λ
Ω
Let 0 < λ < λ1 , and consider the eigenvalue problem
−∆p u − λ(a(x)|u|p + b(x)|u|α+1 |v|β+1 ) = µM |u|p−1 u
q
α+1
−∆q v − λ(d(x)|v| + b(x)|u|
β+1
|v|
q−1
) = µM |v|
v
Ω
Ω.
(3.4)
Then, there exists µM > 0 such that
Z
Z
Z
Z
|∇u|p dx − λ
a(x)|u|p dx − λ
b(x)|u|α+1 |v|β+1 dx ≥ µM
|u|p dx
Ω
Ω
Ω
Ω
Z
Z
Z
Z
(3.5)
q
q
α+1
β+1
q
|∇v| dx − λ
d(x)|v| dx − λ
b(x)|u|
|v|
dx ≥ µM
|v| dx
Ω
Ω
Ω
Ω
EJDE-2005/20
QUASILINEAR ELLIPTIC SYSTEMS
5
−
0
for every (u, v) ∈ X. Thus, Λ+
λ is empty, Λλ = {(0, 0)} and Λλ = Λλ ∪ {(0, 0)}.
−
Clearly, I(u, v) > 0 whenever (u, v) ∈ Λλ and I(u, v) is bounded below by on Λ−
λ.
i.e., inf (u,v)∈Λ− I(u, v) ≥ 0.
λ
Theorem 3.1. Assume (H1)–(H3) and the condition (1.3). Then Problem (1.1)
has a nonnegative nonsemitrivial solution for every λ ∈ (0, λ1 ).
Proof. Let {(un , vn )} ⊂ Λ−
λ be a minimizing sequence; i.e., limn→∞ I(un , vn ) =
inf (u,v)∈Λ− I(u, v). Since
λ
Z
1
1
1
I(un , vn ) = (
+
−
)
µ(x)|un |γ+1 |vn |δ+1 dx
p(δ + 1) q(γ + 1) (γ + 1)(δ + 1) Ω
using (3.2) (3.5) and p < γ + 1 or q < δ + 1, we have
Z
Z
α+1 α+1
β+1 β+1
p
I(un , vn ) ≥ µM [(
−
)
|un | dx + (
−
)
|vn |q dx] .
p
γ+1 Ω
q
γ+1 Ω
Then {(un , vn )} is bounded in X, and so we may assume (un , vn ) * (u0 , v0 ) ∈ X
and un → u0 in Lγ+1 (Ω), vn → v0 in Lδ+1 (Ω).
First we claim that inf (u,v)∈Λ− I(u, v) > 0. Indeed, suppose inf (u,v)∈Λ− I(u, v) =
λ
λ
0. i.e. limn→∞ I(un , vn ) = 0, we have
Z
µ(x)|un |γ+1 |vn |δ+1 dx → 0
Ω
and
Z
|∇un |p − λa(x)|un |p − λb(x)|un |α+1 |vn |β+1 dx
Z
1
=
µ(x)|un |γ+1 |vn |δ+1 dx → 0
(α + 1)(δ + 1) Ω
Z
|∇vn |q − λd(x)|vn |q − λb(x)|un |α+1 |vn |β+1 dx
Ω
Z
1
=
µ(x)|un |γ+1 |vn |δ+1 dx → 0
(β + 1)(γ + 1) Ω
Ω
(3.6)
(3.7)
Moreover, by [5, Lemma 2.1] the compactness of the operators K implies
Z
|∇un |p − λa(x)|un |p − λb(x)|un |α+1 |vn |β+1 dx
Ω
Z
→
|∇u0 |p − λa(x)|u0 |p − λb(x)|u0 |α+1 |v0 |β+1 dx = 0
Z Ω
|∇vn |q − λd(x)|vn |q − λb(x)|un |α+1 |vn |β+1 dx
Ω
Z
→
|∇v0 |q − λd(x)|v0 |q − λb(x)|u0 |α+1 |v0 |β+1 dx = 0
Ω
From λ ∈ (0, λ1 ) and the variational characterization of λ1 , we have (un , vn ) →
(u0 , v0 ) = (0, 0). Let
un
vn
ven =
u
en =
(3.8)
1
p
q 1/p ,
p
(kun kp + kvn kq )
(kun kp + kvn kqq ) q
which are bounded sequences. Indeed, we have
ke
un kpp + ke
vn kqq = 1 for every n ∈ N
6
G. ZHANG, X. LIU, S. LIU
EJDE-2005/20
β+1
Thus, we may assume (e
un , ven ) * (e
u0 , ve0 ). Using that α+1
p + q = 1, we have
Z
Z
.
b(x)|e
un |α+1 |e
vn |β+1 dx =
b(x)|un |α+1 |vn |β+1 dx (kun kpp + kvn kqq )
Ω
Ω
Moreover the range of exponents implies
R
δ+1
|µ|ω2 |un |γ+1
µ(x)|un |γ+1 |vn |δ+1 dx
p∗ |vn |q ∗
Ω
≤
→0
kun kpp + kvn kqq
kun kpp + kvn kqq
Using (3.6) and (3.7), we obtain
Z
|∇e
un |p − λa(x)|e
un |p − λb(x)|e
un |α+1 |e
vn |β+1 dx → 0 ,
Ω
Z
|∇e
vn |q − λd(x)|e
vn |q − λb(x)|e
un |α+1 |e
vn |β+1 dx → 0 .
Ω
Following the argument used on {(e
un , ven )} above, for {(un , vn )} we have
Z
|∇e
un |p − λa(x)|e
un |p − λb(x)|e
un |α+1 |e
vn |β+1 dx
Ω
Z
→
|∇e
u0 |p − λa(x)|e
u0 |p − λb(x)|e
u0 |α+1 |e
v0 |β+1 dx = 0 ,
Z Ω
|∇e
vn |q − λd(x)|e
vn |q − λb(x)|e
un |α+1 |e
vn |β+1 dx
Ω
Z
→
|∇e
v0 |q − λd(x)|e
v0 |q − λb(x)|e
u0 |α+1 |e
v0 |β+1 dx = 0 ,
Ω
and (e
un , ven ) → (e
u0 , ve0 ) = (0, 0) in X, which contradict k(e
un , ven )kX = 1, for every
n ∈ N.
Now we show that (un , vn ) → (u0 , v0 ) in X. Suppose otherwise, then ku0 |p <
lim inf n→∞ kun kp , kv0 kp < lim inf n→∞ kvn kq , and
Z
Z
Z
|∇u0 |p − λ
a(x)|u0 |p − λ
b(x)|u0 |α+1 |v0 |β+1 dx
Ω
Ω
Ω
Z
< lim inf
|∇un |p − λa(x)|un |p − λb(x)|un |α+1 |vn |β+1 dx = 0
n→∞
Ω
Z
|∇v0 |q − λd(x)|v0 |q − λb(x)|u0 |α+1 |v0 |β+1 dx
Ω
Z
< lim inf
|∇vn |q − λd(x)|vn |q − λb(x)|un |α+1 |vn |β+1 dx = 0 .
n→∞
Ω
Since λ ∈ (0, λ1 ) and (u0 , v0 ) 6≡ (0, 0), we have
Z
|∇u0 |p − λa(x)|u0 |p − λb(x)|u0 |α+1 |v0 |β+1 dx > 0 ,
Ω
Z
|∇v0 |q − λd(x)|v0 |q − λb(x)|u0 |α+1 |v0 |β+1 dx > 0
Ω
which is a contradiction. Hence (un , vn ) → (u0 , v0 ) in X.
0
From [4, Theorem 2.3], (u0 , v0 ) is a local minimizer on Λ−
λ and (u0 , v0 ) 6∈ Λλ =
{(0, 0)}, then (u0 , v0 ) is a critical point of I(u, v). This solution is nonnegative due
to the fact that I(|u|, |v|) = I(u, v), and it is also nonsemitrivial by [5, Lemma 2.5].
EJDE-2005/20
QUASILINEAR ELLIPTIC SYSTEMS
7
Theorem 3.2. Assume (H1)–(H3) and the condition (1.3), if λn → λ−
1 and
(un , vn ) is a minimizer of I(un , vn ) on Λ−
,
then
(u
,
v
)
→
(0,
0).
n
n
λ
Proof. First we show that {(un , vn )} is bounded in X. Suppose not, then we may
assume without loss of generality that kun kp → ∞, kvn kq → ∞, as n → ∞. Let
(e
un , ven ) are the sequence introduced by (3.8). The boundedness of (e
un , ven ) implies
(e
un , ven ) * (e
u0 , ve0 ) in X. Then
Z
|∇e
un |p − λn a(x)|e
un |p − λn b(x)|e
un |α+1 |e
vn |β+1 dx
Ω
Z
→
|∇e
u0 |p − λ1 a(x)|e
u0 |p − λ1 b(x)|e
u0 |α+1 |e
v0 |β+1 dx = 0
Ω
Z
|∇e
vn |q − λn d(x)|e
vn |q − λn b(x)|e
un |α+1 |e
vn |β+1 dx
Ω
Z
→
|∇e
v0 |q − λ1 d(x)|e
v0 |q − λ1 b(x)|e
u0 |α+1 |e
v0 |β+1 dx = 0 .
Ω
Since (un , vn ) is a minimizer of I(un , vn ) on Λ−
λ , we have
Z
1
1
1
I(un , vn ) = (
+
−
)
µ(x)|un |γ+1 |vn |δ+1 dx → 0
p(δ + 1) q(γ + 1) (γ + 1)(δ + 1) Ω
Thus, we must have (e
un , ven ) → (e
u0 , ve0 ) 6≡ (0, 0) and u
e0 = k p u1 , ve = k q v1 for some
positive constant k, it is easy to see
Z
γ+1 δ+1
lim (kun kpp + kvn kqq )(
+
− 1)
µ(x)|e
un |γ+1 |e
vn |δ+1 dx = 0 .
n→∞
p
q
Ω
R
R
Hence limn→∞ Ω µ(x)|e
un |γ+1 |e
vn |δ+1 dx = Ω µ(x)|e
u0 |γ+1 |e
v0 |δ+1 dx, it follows that
p
q
k = 0. But as ke
u0 kp + ke
v0 kq = 1, that is impossible. Hence {(un , vn )} is bounded.
Thus we may assume (un , vn ) * (u0 , v0 ) in X. Then, using the same argument
on (un , vn ) as used on (e
un , vev ). It follows that (un , vn ) → (0, 0), and so the proof
is complete.
We remark that the two theorems above give a rather detailed description of the
bifurcation diagram in Figure 1(a).
4. The case λ > λ1
In this section, we prove a nonexistence result for Problem (1.1) by using the
Picone identity.
Lemma 4.1 (Picone identity [1]). Let v > 0, u ≥ 0 be differentiable, and let
up
up
p
|∇v|
−
p
∇u∇v|∇v|p−2
vp
v p−1
up
R(u, v) = |∇u|p − ∇( p−1 )|∇v|p−2 ∇v
v
Then L(u, v) = R(u, v) ≥ 0.
L(u, v) = |∇u|p + (p − 1)
Moreover, L(u, v) = 0 a.e. on Ω if and only if ∇( uv ) = 0 a.e. on Ω. For the next
theorem we will assume
(H3’) u(x) is a nonnegative smooth function, and µ(x) ∈ Lω2 (Ω) ∩ L∞ (Ω), where
ω2 = p∗ q ∗ /[p∗ q ∗ − (γ + 1)q ∗ − (δ + 1)p∗ ]
8
G. ZHANG, X. LIU, S. LIU
EJDE-2005/20
Theorem 4.2. Assume (H1), (H2), (H3’) and Condition (1.3). Then Problem
(1.1) has no nonnegative nonsemitrivial solution, for every λ > λ1 .
Proof. On the contrary, let un ∈ C0∞ (Ω), vn ∈ C0∞ (Ω). We apply Picone’s identity
to the functions un , u and vn , v, to obtain
Z
Z
upn
0≤
|∇un |p dx +
∆p u dx
(4.1)
up−1
ZΩ
ZΩ q
vn
0≤
|∇vn |q dx +
∆ v dx
(4.2)
q−1 q
v
Ω
Ω
β+1
α+1
Using that α+1
and (4.2) by β+1
p + q = 1, then multiplying (4.1) by
p
q , and
then adding, we obtain
Z
Z
α+1
β+1
p
|∇un | dx +
|∇vn |q dx
p
q
Ω
Ω
Z
Z
β+1
α+1
λa(x)upn dx −
λd(x)vnq dx
−
p
q
Ω
ZΩ
Z
α+1
β+1
p α+1−p β+1
≥
λb(x)un u
v
dx +
λb(x)vnq |u|α+1 v β+1−q dx
p
q
Ω
Ω
Z
Z
1
1
p γ+1−p δ+1
+
µ(x)un u
v
dx +
µ(x)vnq uγ+1 v δ+1−q dx
p(δ + 1) Ω
q(γ + 1) Ω
(4.3)
Now, put θ1 = (α + 1)(β + 1)/q and θ2 = (α + 1)(β + 1)/p, then
uα+1
vnβ+1 = uα+1
vnβ+1
n
n
v θ2 u θ1
α + 1 p α+1−p β+1 β + 1 q α+1 β+1−q
≤
un u
v
+
vn u
v
θ
θ
1
2
u v
p
q
Since λ > 0 and b(x) ≥ 0, we obtain
Z
λ
b(x)uα+1
vnβ+1 dx
n
Ω
Z
Z
α+1
β+1
≤
λb(x)upn uα+1−p v β+1 dx +
λb(x)vnq uα+1 v β+1−q dx
p
q
Ω
Ω
Using that
α+1
p
+
β+1
q
= 1 and
1
(α+1)(δ+1)
+
1
(β+1)(γ+1)
(4.4)
< 1, we obtain
γ+1 δ+1
> (α + 1)(β + 1) > 1 .
+
p
q
Then
δ+1
uγ+1
<
n vn
γ + 1 p γ+1−p δ+1 δ + 1 q γ+1 δ+1−q
un u
v
+
vn u
v
.
p
q
Since µ(x) ≥ 0, we have
Z
Z
1
1
p γ+1−p δ+1
µ(x)un u
v
dx +
µ(x)vnq uγ+1 v δ+1−q dx
p(δ + 1) Ω
γ+1 Ω
hγ + 1 Z
1
=
µ(x)upn uγ+1−p v δ+1 dx
(γ + 1)(δ + 1)
p
Ω
Z
i
δ+1
q γ+1 δ+1−q
+
µ(x)vn u
v
dx
q
Ω
Z
1
δ+1
≥
µ(x)uγ+1
dx
n vn
(γ + 1)(δ + 1) Ω
(4.5)
EJDE-2005/20
QUASILINEAR ELLIPTIC SYSTEMS
Combining (4.3), (4.4) and (4.5), we have
Z
Z
Z
α+1
β+1
α+1
p
q
|∇un | dx +
|∇vn | dx −
λa(x)upn dx
p
q
p
Ω
Ω
Ω
Z
Z
β+1
−
λd(x)vnq dx − λ
b(x)uα+1
vnβ+1 dx
n
q
Ω
Ω
Z
1
γ+1 δ+1
>
µ(x)un vn dx
(γ + 1)(δ + 1) Ω
9
(4.6)
Let (un , vn ) converge to (u1 , v1 ) ∈ X, then
Z
Z
Z
β+1
α+1
α+1
p
q
|∇un | dx +
|∇vn | dx −
λa(x)upn dx
p
q
p
Ω
Ω
Ω
Z
Z
β+1
q
λd(x)vn dx − λ
b(x)uα+1
vnβ+1 dx
−
n
q
Ω
Ω
Z
Z
Z
α+1
β+1
α+1
→
|∇u1 |p dx +
|∇v1 |q dx −
λa(x)up1 dx
p
q
p
Ω
Ω
Ω
Z
Z
β+1
−
λd(x)v1q dx − λ
b(x)uα+1
v1β+1 dx ,
1
q
Ω
Ω
Z
Z
1
1
γ+1 δ+1
µ(x)un vn dx →
µ(x)uγ+1
v1δ+1 dx
1
(γ + 1)(δ + 1) Ω
(γ + 1)(δ + 1) Ω
From the variational characterization of λ1 and λ > λ1 , we have
Z
Z
Z
α+1
β+1
α+1
|∇u1 |p dx +
|∇v1 |q dx −
λa(x)up1 dx
p
q
p
Ω
Ω
Ω
Z
Z
β+1
q
−
λd(x)v1 dx − λ
b(x)uα+1
v1β+1 dx < 0 .
1
q
Ω
Ω
R
R
γ+1 δ+1
1
µ(x)uγ+1
v1δ+1 dx > 0, which
Since Ω µ(x)u1 v1 dx > 0, we have (γ+1)(δ+1)
1
Ω
is a contradiction that completes the proof.
References
[1] W. Allegretto and Y. Huang; A Picone’s identity for the p-Laplacian and applications. Nonlinear Analysis TMA, 32(1998), 819-830.
[2] H. Berestycki, I. Capuzzo Dolcetta and L. Nirenberg; Variational methods for indefinite
superlinear homogeneous elliptic problems. Nonlinear Differential Equations Appl., 2(1995),
553-572.
[3] P. A. Binding, P. Drabek and Y. Huang; On Neumann boundary value problems for some
quasilinear elliptic equations. Electron. J. Differential Equations, 1997(1997), No. 5, 1-11.
[4] K. J. Brown and Y. Zhang; The Nehari manifold for a semilinear elliptic equation with a
sign-changing weight function. J. Differential Equations, 193(2003), 481-499.
[5] P. Drabek, N. M. Stavrakakis and N. B. Zographopoulos; Multiple nonsemitrivial solutions
for quasilinear elliptic systems. Differential and Integral Equations, 16(2003), 1519-1531.
[6] J. Fleckinger, R. Mansevich, N. M. Stravrakakis and F. de Thelin; Principal eigenvalues for
some quasilinear elliptic equations on RN . Adv. Diff. Equ., 2(1997), 981-1003.
[7] Z. Nehari; On a class of nonlinear second order differential equations. Trans. Amer. Math.
Soc., 95(1960), 101-123.
[8] N. M. Stavrakakis and N.B. Zographopoulos; Existence results for some quasilinear elliptic
systems in RN . Electron. J. Differential Equations, 1999 (1999), No. 39, 1-15.
[9] N. M. Stavrakakis and N. B. Zographopoulos; Global bifurcation results for some quasilinear
elliptic systems on RN , Adv. Diff. Equ., 8(2003), 315-336.
[10] M. Willem, Minimax Theorems. Birkhauser. Boston, 1996.
10
G. ZHANG, X. LIU, S. LIU
EJDE-2005/20
[11] N. B. Zographopoulos, On the isolation of the principal eigenvalue for a p-laplacian systems.
Appl. Math. Lett., to appear.
Guoqing Zhang
Department of Applied Mathematics, Xidian University, Xi’an Shaanxi, 710071, China
College of Science, University of Shanghai for science and Technology, Shanghai,
200093, China
E-mail address: zgqw2001@sina.com.cn
Xiping Liu
College of Science, University of Shanghai for science and Technology, Shanghai,
200093, China
E-mail address: xipingliu@163.com
Sanyang Liu
Department of Applied Mathematics, Xidian University, Xi’an Shaanxi, 710071, China
E-mail address: liusanyang@263.net