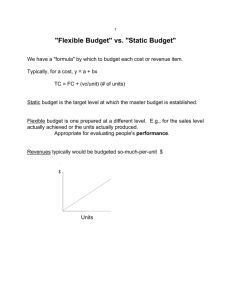
Electronic Journal of Differential Equations, Vol. 2004(2004), No. 18, pp.... ISSN: 1072-6691. URL: or
advertisement
, No. 18, pp.... ISSN: 1072-6691. URL: or")
Electronic Journal of Differential Equations, Vol. 2004(2004), No. 18, pp. 1–12.
ISSN: 1072-6691. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu
ftp ejde.math.txstate.edu (login: ftp)
EXISTENCE OF SOLUTIONS TO SECOND ORDER ORDINARY
DIFFERENTIAL EQUATIONS HAVING FINITE LIMITS AT ±∞
CEZAR AVRAMESCU & CRISTIAN VLADIMIRESCU
Abstract. In this article, we study the boundary-value problem
ẍ = f (t, x, ẋ),
x(−∞) = x(+∞),
ẋ(−∞) = ẋ(+∞) .
Under adequate hypotheses and using the Bohnenblust-Karlin fixed point theorem for multivalued mappings, we establish the existence of solutions.
1. Introduction
3
Let f : R → R be a continuous mapping. Consider the infinite boundary-value
problem
ẍ = f (t, x, ẋ),
x(−∞) = x(+∞),
(1.1)
ẋ(−∞) = ẋ(+∞),
(1.2)
where x(±∞) and ẋ(±∞) denote the limits
x(±∞) = lim x(t)
t→±∞
and ẋ(±∞) = lim ẋ(t),
t→±∞
(1.3)
which are assumed to be finite. Problem (1.1)-(1.2) may be considered as a generalization of problem (1.1) with boundary condtions
x(a) = x(b),
ẋ(a) = ẋ(b),
(1.4)
as a → −∞ and b → +∞. The bilocal boundary-value problem (1.1)-(1.4) is closely
related to the problem of finding periodic solutions to (1.1). The reader is referred
to [17, 19, 20] where extensive use of topological degree theory is made to study
this problem.
Problem (1.1)-(1.2) is related to the so-called convergent solutions, i.e. the solutions defined on R+ = [0, +∞) (or R) and having finite limit to +∞ (respectively
−∞), see [4, 5, 14, 15, 16]. For studies on (1.1)-(1.2) using variational methods,
we refer the reader to [1, 2, 3, 13, 20, 21]. In [12] the existence of the solutions to
the equation (1.1) with the boundary conditions x(∞) = ẋ(∞) = 0 is studied for
f (t, u, v) = g(t)v − u + h(t, u). Through the Schauder-Tychonoff and Banach fixed
point Theorems estimates for the solutions are found.
2000 Mathematics Subject Classification. 34B15, 34B40, 34C37, 54C60.
Key words and phrases. Nonlinear boundary-value problem, set-valued mappings,
boundary-value problems on infinite intervals.
c
2004
Texas State University - San Marcos.
Submitted February 14, 2003. Published February 9, 2004.
1
2
CEZAR AVRAMESCU & CRISTIAN VLADIMIRESCU
EJDE-2004/18
When f is a differentiable function, (1.1) can be written as
ẍ = a(t, x, ẋ)ẋ + b(t, x, ẋ)x + c(t),
(1.5)
R
1
∂f
where a, b : R3 → R, c : R → R, a(t, u, v) := 0 ∂u (t, su, sv) ds, b(t, u, v) :=
R 1 ∂f
(t, su, sv) ds and c(t) := f (t, 0, 0), for all t, u, v ∈ R.
0 ∂v
Sufficient conditions for the existence of solutions to the linear problem
ẍ = a(t)ẋ + b(t)x + c(t),
(1.6)
with boundary condition (1.2), were given in [11]. By using this result, in the real
Banach space
X := x ∈ C 2 (R) : (∃) x(±∞), (∃) ẋ(±∞)
endowed with the uniform convergence topology on R one defines an operator T :
X → 2X which maps u ∈ X into the set of the solutions to the problem (1.7)-(1.2),
where
ẍ = a(t, u(t), u̇(t))ẋ + b(t, u(t), u̇(t))x + c(t).
(1.7)
Next one considers the restriction of T to a bounded, convex and closed set M ,
conveniently chosen so that the Bohnenblust-Karlin Theorem can be applied. The
compactness of T (M ) is established by using a characterization developed by the
the first author in [4, 6].
The use of a multivalued operator T is motivated by the fact that one cannot determine a solution to the problem (1.7)-(1.2) through an “initial” condition
independent of u.
2. Main result
3
Let a, b : R → R, c : R → R be continuous functions, and let
α1 (t) := inf a(t, u, v) , α2 (t) := sup a(t, u, v) ,
u,v∈R
β(t) := sup
u,v∈R
b(t, u, v) ,
u,v∈R
Ai (t) := exp
Z
t
αi (s) ds ,
0
for i ∈ {1, 2} and t ∈ R. We shall assume that α1 , α2 , β are defined on R.
Consider the following hypotheses, where the integrals are considered in the
Riemann sense:
(A1) The mappings α1 and α2 are bounded on R, and limt→±∞ αi (t) = 0, for
i ∈ {1, 2}
(A2) limt→±∞ Ai (t) = 0 for i ∈ {1, 2}
(B1) 0 ≤ b(t, u, v) for every t, u, v ∈ R and limt→±∞ β(t) = 0
R +∞
Rt
(B2) −∞ Ai (t) · 0 Aβ(s)
ds dt ∈ R for i ∈ {1, 2}
i (s)
R +∞
dt < +∞, for i ∈ {1, 2}
(B3) −∞ Aβ(t)
R +∞ i (t)
(C1) −∞ |c(t)|dt < +∞
R +∞ R t |c(s)| (C2) −∞
ds dt ∈ R for i ∈ {1, 2}.
−t Ai (s)
Our main result is as follows:
Theorem 2.1. If the hypotheses (A1)–(A2), (B1)–(B3), (C1)–(C2) are satisfied,
then (1.5)-(1.2) has a solution.
EJDE-2004/18
EXISTENCE OF SOLUTIONS
3
Since
lim
t→±∞
Ai (t)
1
= lim R t β(s)
R t β(s)
t→±∞
ds
Ai (t) · 0 Ai (s) ds
0 Ai (s)
is a real number by hypothesis (B3), it follows by hypothesis (B2), via a well known
convergence criterion for Riemann integrals, that for each i ∈ {1, 2},
Z +∞
Ai (t)dt < +∞ .
(2.1)
−∞
Similarly, by hypothesis (A2),
lim
β(t)
t→±∞ β(t)
Ai (t)
= 0,
lim
|c(t)|
t→±∞ |c(t)|
Ai (t)
= 0,
it follows, by hypothesis (B3), that
Z +∞
β(t)dt < +∞,
(2.2)
|c(t)|
dt < +∞,
Ai (t)
(2.3)
−∞
and, by hypothesis (C1),
Z
+∞
−∞
for each i ∈ {1, 2}.
Remark 2.2. (i) One can replace the hypothesis (B2) by
R +∞
(B2’) −∞ Ai (t)dt < +∞ .
(ii) Assumption (B2’) does not imply (C2).
R (·)
(i) Indeed, since (B3) implies the boundedness of the mapping 0 Aβ(s)
ds and
i (s)
therefore, (B2’) implies (B2).
(ii) It is sufficient to choose c(t) = Ai (t), for all t ∈ R, where i = 1 or i = 2.
For proving our main result we use the following theorem.
Theorem 2.3 (Bohnenblust-Karlin [22, p. 452]). Let X be a Banach space and
M ⊂ X be a convex closed subset of it. Suppose that T : X → 2X is a multivalued
operator on X satisfying the following hypotheses:
(a) T (M ) ⊂ 2M and T is upper semicontinuous
(b) the set T (M ) is relatively compact
(c) for every x ∈ M , T (x) is a non-empty convex closed set.
Then T admits fixed points.
Recall that T : M → 2M is upper semicontinuous if for every closed subset A of
M , the set
T −1 (A) := x ∈ M : T (x) ∩ A 6= ∅
is also a closed subset of M . Another useful result is the following Lemma.
Lemma 2.4 (Barbălat). If f : [0, +∞) → R satisfies: (a) f is uniformly continuous
R +∞
and (b) the integral 0 f (t) dt exists and is finite, then limt→+∞ f (t) = 0.
4
CEZAR AVRAMESCU & CRISTIAN VLADIMIRESCU
EJDE-2004/18
The main idea of this paper is to build a multivalued operator T defined on an
adequate space which satisfies the hypotheses of the Bohnenblust-Karlin Theorem.
We define
X := x ∈ C 2 (R) : (∃) x(±∞) and ẋ(±∞) ,
which, endowed with the usual norm,
kxk := sup max |x(t)|, |ẋ(t)| ,
t∈R
becomes a real Banach space. The relative compactness of the set T (M ) be will be
proved by using the following Proposition.
Proposition 2.5 (Avramescu [4, 6]). A set A ⊂ X is relatively compact if and
only if the following conditions are fulfilled:
(a) There exist h1 , h2 ≥ 0 such that for every x ∈ A and t ∈ R, we have
|x(t)| ≤ h1 and |ẋ(t)| ≤ h2
(b) For every K = [a, b] ⊂ R and ε > 0 there exists δ = δ(K, ε) > 0 such that
for every x ∈ A and t1 , t2 ∈ K with |t1 −t2 | < δ, we have |x(t1 )−x(t2 )| < ε
and |ẋ(t1 ) − ẋ(t2 )| < ε
(c) For every ε > 0 there exists T = T (ε) > 0 such that for every t1 , t2 with
|t1 |, |t2 | > T and t1 ·t2 > 0, and for every x ∈ A, we have |x(t1 )−x(t2 )| < ε
and |ẋ(t1 ) − ẋ(t2 )| < ε.
3. Construction of the multivalued operator T
Let u ∈ C 2 (R) be arbitrary. Consider the problem
ẍ = au (t)ẋ + bu (t)x + c(t)
x(+∞) = x(−∞),
ẋ(+∞) = ẋ(−∞),
(3.1)
where au (t) := a(t, u(t), u̇(t)) and bu (t) = b(t, u(t), u̇(t)). Consider the homogeneous problem
ẍ = au (t)ẋ + bu (t)x
(3.2)
x(+∞) = x(−∞), ẋ(+∞) = ẋ(−∞).
Since
Z t
x(t) = exp
y(s)ds , t ∈ R
0
is a solution to ẍ = au (t)ẋ + bu (t)x if and only if y is a solution to
ẏ = au y + bu − y 2 ,
we have au (t)y − y 2 ≤ ẏ ≤ au (t)y + bu (t), for every t ∈ R.
Let v, w satisfy
v̇ = au (t)v − v 2
v(0) = ξ
(3.3)
(3.4)
and
ẇ = au (t)w + bu (t)
w(0) = ξ .
Hence
ẏ = au y + bu − y 2
y(0) = ξ,
(3.5)
EJDE-2004/18
EXISTENCE OF SOLUTIONS
5
which implies
v(t) ≤ y(t) ≤ w(t),
if t ≥ 0,
w(t) ≤ y(t) ≤ v(t), if t ≤ 0.
Rt
Let αu (t) := exp 0 au (s)ds , for every t ∈ R. Thus
ξαu (t)
Rt
1 + ξ 0 αu (s)ds
Z t
bu (s) w(t) = αu (t) ξ +
ds .
α
u (s)
0
v(t) =
(3.6)
Therefore,
Z t
h
ξαu (t)
bu (s) i
≤ y(t) ≤ αu (t) ξ +
ds ,
Rt
1 + ξ 0 αu (s)ds
0 αu (s)
Z t
h
bu (s) i
ξαu (t)
αu (t) ξ +
ds ≤ y(t) ≤
,
Rt
α
(s)
u
1 + ξ αu (s)ds
0
if t ≥ 0,
if t ≤ 0.
0
We write
gu (t) ≤ y(t) ≤ Gu (t),
for t ∈ R,
(3.7)
where
gu (t) :=
ξαu (t)
Rt
,
α (s)ds
0h u
R t bu (s) i
αu (t) ξ +
ds ,
0 αu (s)
1+ξ
if t ≥ 0
(3.8)
if t ≤ 0
and
Gu (t) :=
h
R
αu (t) ξ + t
0
bu (s)
αu (s) ds
i
, if t ≥ 0
ξαu (t)
R
,
1+ξ 0t αu (s)ds
(3.9)
if t ≤ 0 .
Let yu denote the solution to the equation (3.3) with the initial condition
yu (0) = ξ .
Hence, gu (t) ≤ yu (t) ≤ Gu (t), for every t ∈ R. From (3.6) we see that yu is defined
for all t ∈ R if and only if
1
1
, R0
ξ ∈ − R +∞
:= (λu , µu ).
α
(s)ds
α
(s)ds
u
u
0
−∞
We let λ := supu∈C 2 (R) {λu } and µ := inf u∈C 2 (R) {µu }. Since
A1 (t) ≤ αu (t) ≤ A2 (t),
for every t ≥ 0 and u ∈ C 2 (R)
A2 (t) ≤ αu (t) ≤ A1 (t),
for every t ≤ 0 and u ∈ C 2 (R)
it follows that
− R +∞
0
1
A1 (t)dt
≤ − R +∞
0
1
αu (s)ds
≤ − R +∞
0
1
A2 (t)dt
:= λ
and
µ := R 0
−∞
1
A1 (t)dt
≤ R0
−∞
1
αu (s)ds
≤ R0
−∞
1
A2 (t)dt
.
(3.10)
6
CEZAR AVRAMESCU & CRISTIAN VLADIMIRESCU
EJDE-2004/18
Therefore,
− R +∞
0
1
1
:= λ < 0 < µ := R 0
A2 (t)dt
−∞
.
(3.11)
A1 (t)dt
Let
g(t) :=
inf
u∈C 2 (R)
gu (t) and G(t) :=
sup Gu (t), for t ∈ R.
u∈C 2 (R)
For t ≤ 0, we have
Z
h
gu (t) ≥ αu (t) λ +
0
t
Z t
h
bu (s) i
β(s) i
ds ≥ A1 (t) λ +
ds
αu (s)
0 A2 (s)
and for t ≥ 0,
gu (t) ≥
λαu (t)
λA2 (t)
≥
.
Rt
Rt
1 + λ 0 αu (s)ds
1 + λ 0 A2 (s)ds
Thus
λA2 (t)
Rt
,
A (s)ds
0h 2
R t β(s) i
A1 (t) λ +
ds ,
0 A2 (s)
g(t) :=
1+λ
if t ≥ 0
if t ≤ 0 .
(3.12)
Similarly
h
R
A2 (t) µ + t
0
G(t) :=
β(s)
A1 (s) ds
i
,
µA1 (t)
R
,
1+µ 0t A1 (s)ds
if t ≥ 0
if t ≤ 0 .
(3.13)
By hypothesis (A2), one has g(±∞) = G(±∞) = 0. Thus for every ξ ∈ (λ, µ) and
for every y solution to the equation (3.3) with the initial condition y(0) = ξ, we
have
g(t) ≤ y(t) ≤ G(t), for every t ∈ R.
(3.14)
Let ξ1 , ξ2 ∈ (λ, µ), ξ1 6= ξ2 be arbitrary, and yiu be the solution to the problem
ẏ = au (t)y + bu (t) − y 2
y(0) = ξi
Rt
where i ∈ {1, 2} and u ∈ C 2 (R). Let xui (t) := exp( 0 yiu (s)ds), for t ∈ R, i ∈ {1, 2}
and u ∈ C 2 (R). Then xui (0) = 1, ẋui (0) = ξi , ẋui (t) = yiu (t) · xui (t), for t ∈ R,
i ∈ {1, 2} and u ∈ C 2 (R).
Let us prove that, for every i ∈ {1, 2} and u ∈ C 2 (R), xui (±∞), ẋui (±∞), exist
and are finite. Indeed, by relation (2.1),
Z +∞
xui (+∞) = exp
yiu (t)dt
0
Z t
Z +∞
β(s) ≤ exp
A2 (t) µ +
ds dt
0
0 A1 (s)
Z
Z
+∞
n +∞
h
β(s) io
≤ exp (
A2 (t)dt · µ +
ds < +∞,
A1 (s)
0
0
and
xui (−∞)
= exp
Z
−∞
yiu (t)dt
0
≤ exp
n Z
0
−∞
Z
h
A1 (t)dt · λ +
0
−∞
β(s) io
ds < +∞,
A1 (s)
EJDE-2004/18
EXISTENCE OF SOLUTIONS
7
for every i ∈ {1, 2} and u ∈ C 2 (R). For i ∈ {1, 2} and u ∈ C 2 (R),
Z t
|xui (t)| = exp
yiu (s)ds .
0
Hence, for t ≥ 0,
Z t
nZ
exp
yiu (s)ds ≤ exp (
0
+∞
0
and for t ≤ 0,
Z t
nZ
u
exp
yi (s)ds ≤ exp (
0
+∞
β(s) io
ds =: δ1
A1 (s)
−∞
β(s) io
ds =: δ2 .
A1 (s)
Z
h
A2 (t)dt) · µ +
0
−∞
h
Z
A1 (t)dt) · λ +
0
0
u
|xi (t)|
Therefore, taking M1 := max {δ1 , δ2 } > 0, we have
≤ M1 , for every t ∈ R,
i ∈ {1, 2}, and u ∈ C 2 (R).
Since g and G are continuous with g(±∞) = G(±∞) = 0 it follows that they
are bounded on R. But
g(t) ≤ yiu (t) ≤ G(t),
for every t ∈ R, i ∈ {1, 2} and u ∈ C 2 (R).
Hence, there exists a constant δ3 > 0 such that
|yiu (t)| ≤ δ3 ,
for t ∈ R, i ∈ {1, 2} and u ∈ C 2 (R)
and so
|ẋui (t)| ≤ M1 · δ3 =: M2 ,
for t ∈ R, i ∈ {1, 2} and u ∈ C 2 (R).
For u ∈ C 2 (R) the general solution to the nonhomogeneous equation
ẍ = au (t)ẋ + bu (t)x + c(t)
is
x(t) = γ1u xu1 (t) + γ2u xu2 (t) + xu2 (t) ·
Z
0
Z
t
xu1 (s) ·
c(s)
ds
(ξ2 − ξ1 )αu (s)
t
c(s)
− xu1 (t) ·
xu2 (s) ·
ds,
(ξ2 − ξ1 )αu (s)
0
with γ1u , γ2u ∈ R. From the condition x(+∞) = x(−∞), we have
γ1u · [xu1 (+∞) − xu1 (−∞)] + γ2u · [xu2 (+∞) − xu2 (−∞)]
Z +∞
c(s)
= xu1 (+∞) ·
xu2 (s) ·
ds
(ξ2 − ξ1 )αu (s)
0
Z −∞
c(s)
− xu1 (−∞) ·
xu2 (s) ·
ds
(ξ
−
ξ1 )αu (s)
2
0
Z −∞
c(s)
u
+ x2 (−∞) ·
xu1 (s) ·
ds
(ξ
−
ξ1 )αu (s)
2
0
Z +∞
c(s)
− xu2 (+∞) ·
xu1 (s) ·
ds.
(ξ
−
ξ1 )αu (s)
2
0
(3.15)
(3.16)
(3.17)
Now we prove that the relation (3.17) is satisfied by infinitely many pairs (γ1u , γ2u ),
u ∈ C 2 (R). Indeed, if we denote by
d1 := xu1 (+∞) − xu1 (−∞),
d2 := xu2 (+∞) − xu2 (−∞),
and d3 the right hand side of (3.17), then we have to consider only three cases.
8
CEZAR AVRAMESCU & CRISTIAN VLADIMIRESCU
EJDE-2004/18
Case 1. If d1 6= 0 and d2 = 0, it follows that γ1u = dd13 and γ2u ∈ R; similarly, if
d1 = 0 and d2 6= 0, it follows that γ1u ∈ R and γ2u = dd32 .
Case 2. If d1 6= 0 and d2 6= 0, it follows that
γ1u =
d3 − d2 γ2u
d1
and γ2u ∈ R.
Case 3. If d1 = 0 and d2 = 0, we show that d3 = 0 (and so the solutions are γ1u ,
γ2u ∈ R).
Indeed, in this case, xu1 (+∞) = xu1 (−∞) and xu2 (+∞) = xu2 (−∞), and we have
to prove that
Z +∞
Z +∞
c(s)
c(s)
ds = xu2 (+∞) ·
xu1 (s) ·
ds.
(3.18)
xu1 (+∞) ·
xu2 (s) ·
α
(s)
α
u
u (s)
−∞
−∞
To prove (3.18) we shall apply Lemma 2.4 to the mapping f : [0, +∞) → R, defined
by
Z +t
Z +t
c(s)
c(s)
ds − xu2 (t) ·
xu1 (s) ·
ds.
f (t) := xu1 (t) ·
xu2 (s) ·
αu (s)
αu (s)
−t
−t
Thus
Z +t
Z +t
df
c(s)
c(s)
u
u
u
(t) = ẋ1 (t) ·
ds − ẋ2 (t) ·
ds
x2 (s) ·
xu1 (s) ·
dt
α
(s)
α
u
u (s)
−t
−t
c(−t)
[xu (t) · xu2 (−t) − xu2 (t) · xu1 (−t)] .
+
αu (−t) 1
Since ẋui (±∞) = xui (±∞) · yiu (±∞) = 0, i ∈ {1, 2}, the mapping
R (see hypothesis (C2)), and
c
αu
is bounded on
lim [xu1 (t) · xu2 (−t) − xu2 (t) · xu1 (−t)] = 0,
t→+∞
it follows that limt→+∞ df
dt (t) = 0. Therefore f is uniformly continuous on [0, +∞),
being Lipschitz on [0, +∞). Since xui , i ∈ {1, 2} are bounded, from (C2) it follows
R +∞
that 0 f (t) dt exists and is finite. Hence, by Lemma 2.4 we obtain
lim f (t) = 0.
t→+∞
Now we define the multivalued operator T : X → 2X , by
Z (·)
n
c(s)
xu1 (s) ·
T u := γ1u xu1 (·) + γ2u xu2 (·) + xu2 (·) ·
ds
(ξ2 − ξ1 )αu (s)
0
Z (·)
c(s)
− xu1 (·) ·
xu2 (s) ·
ds,
(ξ
−
ξ1 )αu (s)
2
0
o
with |γ1u | + |γ2u | ≤ 1, γ1u , γ2u satisfying (3.17) ,
for every u ∈ X. By (3.15)-(3.16) we have
Z
Z
M1 t u
c(s) t u
c(s) |x(t)| ≤ 2M1 +
x1 (s)
ds +
x2 (s)
ds .
|ξ2 − ξ1 |
αu (s)
αu (s)
0
0
Hence |x(t)| ≤ k1 , for every t ∈ R, where
Z +∞
Z 0
n
2M12
|c(s)|
2M12
|c(s)| o
k1 := max 2M1 +
ds, 2M1 +
ds .
|ξ2 − ξ1 | 0
A1 (s)
|ξ2 − ξ1 | −∞ A2 (s)
EJDE-2004/18
EXISTENCE OF SOLUTIONS
9
Similarly
Z t
Z t
c(s)
c(s) u u
u u
u
u
u
|ẋ(t)| = γ1 ẋ1 (t) + γ2 ẋ2 (t) + ẋ2 (t)
x1 (s)
ds − ẋ1 (t)
xu2 (s)
ds,
αu (s)
αu (s)
0
0
and there exists another constant k2 ≥ 0,
Z
Z
n
2M1 M2 0 |c(s)| o
2M1 M2 +∞ |c(s)|
k2 := max 2M2 +
ds, 2M2 +
ds ,
|ξ2 − ξ1 | 0
A1 (s)
|ξ2 − ξ1 | −∞ A2 (s)
such that |ẋ(t)| ≤ k2 , for every t ∈ R. Remark that, by relation (2.3), k1 , k2 are
finite. We let k := max{k1 , k2 }, and
M := x ∈ C 2 (R), |x(t)| ≤ k, |ẋ(t)| ≤ k, for every t ∈ R .
4. Proof of main result
To prove Theorem 2.1 it is sufficient to prove that the operator T has a fixed
point. We do this in three steps.
Step 1: For every u ∈ M , T (u) is a non-empty convex closed set. Let u ∈ M be
arbitrary.
From the definition of T we see that T (u) is non-empty and convex.
Let (xn )n∈N ⊂ T (u) be such that xn → x and ẋn → ẋ uniformly on R as n → ∞.
We have
u
u
xn (t) := γ1,n
xu1 (t) + γ2,n
xu2 (t) + H u (t),
u
u
u
u
, γ2,n
satisfying (3.17), and
| ≤ 1, γ1,n
for every n ∈ N, with |γ1,n
| + |γ2,n
Z t
Z t
c(s)
c(s)
H u (t) := xu2 (t) ·
xu1 (s) ·
ds − xu1 (t) ·
xu2 (s) ·
ds.
(ξ2 − ξ1 )αu (s)
(ξ2 − ξ1 )αu (s)
0
0
u
u
Then there exist subsequences such that γ1,k
→ γ1u and γ2,k
→ γ2u , as n → ∞.
n
n
kn
u u
u u
Since (x )n∈N converges uniformly to y := γ1 x1 + γ2 x2 + H u , it follows that
x = y. Also
ẋkn → ẏ = ẋ,
as n → ∞.
So x ∈ T (u), that is T (u) is a closed set.
Step 2: T (M ) is relatively compact. The relative compactness of T (M ) will be
proved by using Proposition 2.5.
From the definitions of T and M we see that |x(t)| ≤ k, |ẋ(t)| ≤ k, for all t ∈ R.
Thus the first condition of Proposition 2.5 is fulfilled with h1 = h2 = k.
Conditions (b) and (c) of Proposition 2.5 are implied by the following assumption:
(d) There exist f1 , f2 : R → R+ integrable on R such that for every x ∈ A
|ẋ(t)| ≤ f1 (t) and
|ẍ(t)| ≤ f2 (t),
for t ∈ R.
This last assertion follows from the fact that, for every t1 , t2 ∈ R,
Z t2
Z t2
x(t1 ) − x(t2 ) =
ẋ(t)dt and ẋ(t1 ) − ẋ(t2 ) =
ẍ(t) dt .
t1
t1
For i ∈ {1, 2} let
o
n
R
|ξi |A2 (t)
max A2 (t) µ + t β(s) ds ,
Rt
,
t≥0
A
(s)
0 1
|1+ξi 0 A2 (s)ds|
n
g1i (t) :=
R 0 β(s) o
|ξ
|A
(t)
i
1
max
R
, A1 (t) − λ + t A2 (s) ds , t ≤ 0 .
|1+ξ t A (s)ds|
i
0
1
10
CEZAR AVRAMESCU & CRISTIAN VLADIMIRESCU
EJDE-2004/18
Hence |ẋui | is bounded by the integrable function M1 · g1i , i ∈ {1, 2}. Furthermore,
since
Z
t u
c(s)
ds
x2 (s) ·
(ξ
−
ξ
)
·
α
(s)
2
1
u
0
R +∞ |c(s)|
M1
is bounded (on the positive semiaxis by |ξ2 −ξ1 | · 0
A1 (s) ds and on the negative
R 0 |c(s)|
M1
u
semiaxis by |ξ2 −ξ1 | · −∞ A1 (s) ds), and |ẋ1 | is bounded by an integrable function,
we see that
Z (·)
u
c(s)
ẋ1 ·
xu2 (s) ·
ds
(ξ2 − ξ1 ) · αu (s)
0
is bounded by an integrable function. Similarly,
Z (·)
u
c(s)
ẋ2 ·
ds
xu1 (s) ·
(ξ2 − ξ1 ) · αu (s)
0
is bounded by an integrable function. Therefore, the existence of f1 in assertion
(d) follows. Now, since
ẍ(t) = au (t)ẋ(t) + bu (t)x + c(t),
au is bounded (hypothesis (A1)), |ẋ| is bounded by an integrable function, |x| is
bounded (by k), bu is integrable on R (by relation (2.2), hypothesis (B1), and |c| is
integrable on R (by hypothesis (C1)), we see that |ẍ| is bounded by an integrable
function. This proves the existence of f2 , and hence assertion (d) is verified.
Step 3: T is upper semicontinuous. Let A be a closed subset of M . Hence if
(un )n ⊂ A such that un → u and u̇n → u̇ uniformly on R, as n → ∞, it follows
that u ∈ A.
Let zn ∈ T −1 (A) be such that zn → z and żn → ż uniformly on R, as n → ∞.
We have to prove that z ∈ T −1 (A). Since zn ∈ T −1 (A) there exists xn ∈ A,
xn ∈ T zn . Thus
ẍn = a(t, zn , żn )ẋn + x(t, zn , żn )xn + c(t),
n∈N
(4.1)
and
xn (+∞) = xn (−∞),
ẋn (+∞) = ẋn (−∞),
n ∈ N.
(4.2)
Since xn ∈ T (M ) and T (M ) is relatively compact, the sequence xn contains subsequence converging in C 2 to some x. One can assume that xn → x, ẋn → ẋ
uniformly on R, as n → ∞.
Since a(t, zn (t), żn (t)) → a(t, z(t), ż(t)) and b(t, zn (t), żn (t)) → b(t, z(t), ż(t)),
uniformly on compact subsets of R, it follows that x is solution to the equation
ẍ = a(t, z(t), ż(t))ż + b(t, z(t), ż(t))z + c(t),
with
x(0) = lim xn (0) and ẋ(0) = lim ẋn (0).
n→∞
n→∞
Furthermore, by (4.2) we find, by passing to the limit as n → ∞,
x(+∞) = x(−∞) and ẋ(+∞) = ẋ(−∞).
Since the set A is closed, x ∈ A. Therefore, z ∈ T −1 (A), which completes the proof
of Theorem 2.1.
EJDE-2004/18
EXISTENCE OF SOLUTIONS
11
References
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]
[22]
S. Adly, D. Goeleven and D. Motreanu, Periodic and homoclinic solutions for a class of
unilateral problems, Discrete Cont. Dyn. Systems, 3(1997), pp. 579-590.
S. Adly and D. Goeleven, Homoclinic orbits for a class of hemivariational inequalities,
Applicable Analysis, 58(1995), pp. 229-240.
A. Ambrosetti and M. L. Bertotti, Homoclinics for second order conservative systems,
in: Partial differential equations and related subjects (Proc. conf. in honor of L. Nirenberg),
Longman Scientific Technical, Harbour, England, 1992, pp. 21-37.
C. Avramescu, Sur l’existence des solutions convergentes des systèmes d’équations
différentielles ordinaires, Ann. Mat. Purra ed Appl., LXXXI(IV)(1969), pp. 147-168.
C. Avramescu, Sur l’existence des solutions des équations intégrales dans certains espaces
fonctionnels, Ann. Univ. Sc. Budapest, XIII(1970), pp. 19-34.
C. Avramescu, Existence problems for homoclinic solutions, Abstract and Applied Analysis,
7(1)(2002), pp. 1-27.
C. Avramescu, Continuation theorems and ω -closed orbits for ordinary differential equations, University of the West Timişoara, Preprint Series in Math., Seminar of Math. Analysis,
131(2001).
C. Avramescu, Evanescent solutions for linear ordinary differential equations, Electronic
Journal of Qualitative Theory of Differential Equations, 9(2002), pp.1-12.
C. Avramescu and C. Vladimirescu, Homoclinic solutions for linear and linearizable ordinary differential equations, Abstract and Applied Analysis, 5(2)(2000), pp. 65-85.
C. Avramescu and C. Vladimirescu, Existence results for generalized bilocal boundaryvalue problems, Ann. Univ. Craiova, XXVI(1999), pp. 5-14.
C. Avramescu and C. Vladimirescu, Homoclinic solutions for second order linear differential equations, Ann. Univ. Craiova, XXVII(2000), pp. 14-23.
C. Avramescu and C. Vladimirescu, Limits of solutions of a perturbed linear differential
equation, Electronic Journal of Qualitative Theory of Differential Equations, 3(2002), pp.
1-11.
V. Coti Zelati and P. H. Rabinovici, Homoclinic orbits for second order Hamiltonian
systems possessing superquadratic potentials, J. Amer. Math. Soc., 4(1992), pp. 693-727.
G. Th. Hallam, Convergence of solutions of perturbed nonlinear differential equations, J.
Diff. Eqs., 12(1972), pp. 63-80.
A.G. Kartsatos, Convergence in perturbed nonlinear systems, Tohoku Math. J., 4(1972),
pp. 1-7.
A. G. Kartsatos, Advanced Ordinary Differential Equations, Mariner Publishing Co., Inc.,
1980.
J. Mawhin, Topological degree methods in nonlinear boundary-value problems, CBMS Regional Conf. Soc. Math., 40, Amer. Math. Soc., Providence, R. I., 1979.
J. Mawhin, Continuation theorems and periodic solutions of ordinary differential equations,
in: Topological Methods in Differential Equations and Inclusion (Montreal 1996), Kluwer,
1997.
J. Mawhin, Topological degree and boundary-value problems for nonlinear differential equations, Lectures Notes in Math., 1537, Springer-Verlag, Berlin, 1993.
P. H. Rabinowitz, Homoclinic orbits for a class of Hamiltonian systems, Proc. Royal Edinburg, 114 A(1990), pp. 33-38.
D. Yanheng and M. Girardi, Periodic and homoclinic solutions to a class of Hamiltonian
systems with the potentials changing sign, Dyn. Syst. Appl., 2(1993), pp. 131-145.
E. Zeidler, Nonlinear Functional Analysis and its Applications, I, Fixed - Point Theorems,
Springer-Verlag, Berlin, 1993.
Cezar Avramescu
Centre for Nonlinear Analysis and its Applications, University of Craiova, Al.I. Cuza
Street, No. 13, Craiova RO-200585, Romania
E-mail address: zarce@central.ucv.ro, cezaravramescu@hotmail.com
12
CEZAR AVRAMESCU & CRISTIAN VLADIMIRESCU
EJDE-2004/18
Cristian Vladimirescu
Department of Mathematics, University of Craiova, Al.I. Cuza Street, No. 13, Craiova
RO-200585, Romania
E-mail address: cvladi@central.ucv.ro, vladimirescucris@hotmail.com