On the Generality of Assuming that a Family of Continuous
advertisement

On the Generality of Assuming that a Family of Continuous
Functions Separates Points
Scott Lambert, Kristopher Lee, and Aaron Luttman
Abstract
For an algebra A of complex-valued, continuous functions on a compact Hausdorff space
(X, τ ), it is standard practice to assume that A separates points in the sense that for each
distinct pair x, y ∈ X, there exists an f ∈ A such that f (x) 6= f (y). If A does not separate
b τb) that does
points, it is known that there exists an algebra Ab on a compact Hausdorff space (X,
separate points such that the map A 7→ Ab is a uniform norm isometric algebra isomorphism. So
it is, to a degree, without loss of generality that we assume A separates points. The construction
b τb) does not require that A has any algebraic structure nor that (X, τ ) has any
of Ab and (X,
properties, other than being a topological space. In this work we develop a framework for
determining the degree to which separation of points may be assumed without loss of generality
for any family A of bounded, complex-valued, continuous functions on any topological space
b
(X, τ ). We also demonstrate that further structures may be preserved by the mapping A 7→ A,
such as boundaries of weak peak points, the Lipschitz constant when the functions are Lipschitz
on a compact metric space, and the involutive structure of real function algebras on compact
Hausdorff spaces.
1
Introduction
Let (X, τ ) be a compact Hausdorff space and C(X) the space of complex-valued, continuous functions on X. When studying a function algebra A ⊂ C(X), it is standard to assume that A
separates points, which is to say that for each pair of distinct x, y ∈ X there exists an f ∈ A such
that f (x) 6= f (y). This assumption can be viewed as being “without loss of generality” in the
sense that there exists another algebra Ab that does separate points such that Ab is in one-to-one
b The
correspondence with A in such a way that the algebraic structure of A is inherited by A.
alternate algebra Ab is constructed by defining an equivalence relation on X by x ∼ y if and only if
f (x) = f (y) for all f ∈ A. Denoting the equivalence class of x by x
b and the collection of equivalence
b then for each f ∈ A the function fb: X
b → C is defined by fb(b
classes by X,
x) = f (x). It can be
b induced by the map ϕ(x) = x
b τb)
shown that the quotient topology, denoted by τb, on X
b, makes (X,
b
b
b
into a compact Hausdorff space, that the collection A = {f : f ∈ A} ⊂ C(X) separates points,
and that the mapping f 7→ fb is a algebra isomorphism that preserves the uniform norm, which we
denote by k · k∞ .
b τb) and Ab does not require (X, τ ) to be a compact Hausdorff space nor
The construction of (X,
that A has algebraic structure. Hence, for any family A ⊂ C(X), where (X, τ ) is only assumed to
b τb) and a family Ab ⊂ C(X),
b which
be a topological space, we can construct a topological space (X,
separates points, such that A and Ab are in a uniform norm preserving, one-to-one correspondence.
However, to be able to assume “without loss of generality” that A separates points, it must be
1
b τb) has the same relevant topological properties of (X, τ ). We begin by giving the
shown that (X,
general framework for the study of separation of points in Section 2.1. The case when (X, τ ) is
compact Hausdorff is well understood, and the relevant results are brought together in Section 2.2.
We extend those results in Section 2.3 to the case where (X, τ ) is a locally compact Hausdorff space
and the functions in A vanish at infinity, and demonstrate that the locally compact Hausdorff case
is quite different from the compact Hausdorff case.
Beyond the basic topological structures of the space (X, τ ), it is important to be able to catb One particular structure of
egorize what other structures are preserved by the mapping A 7→ A.
interest for a family of functions is the collection of boundaries. Given a family of functions A on
a domain X, a boundary for A is a subset B ⊂ X such that every f ∈ A attains its maximum
modulus on B. Since boundaries are naturally related to the subsets of the domain where functions
are maximized – and the map A 7→ Ab preserves the uniform norm – it is not surprising that the
b In Section 3 we show that, for a locally compact
boundaries of A correspond to boundaries of A.
Hausdorff space (X, τ ) and a family of functions A that vanish at infinity, the collection of intersections of maximizing sets for functions in A is in one-to-one correspondence with the collection
b This fact is not surprising, but we also show
of intersections of maximizing sets for functions in A.
a one-to-one correspondence between the intersections of maximizing sets that are minimal with
respect to inclusion. The fact that minimality of such sets is a property preserved by A 7→ Ab is far
less obvious.
Another structure of importance in the study of function algebras is norm structure. It is
straightforward to see that A 7→ Ab preserves the uniform norm, but it is often important that the
map preserve a norm other than the uniform norm. Given a compact metric space X with metric
d, the Lipschitz constant of a function f ∈ C(X) is given by
|f (x) − f (y)|
Ld (f ) = sup
: x, y ∈ X, x 6= y ,
d(x, y)
and the algebra of complex-valued, Lipschitz functions on X is the set
Lip(X) = {f ∈ C(X) : Ld (f ) < ∞} .
It is well-known that Lip(X) is a complete subalgebra of C(X) under the norm kf kd = max{kf k∞ , Ld (f )}.
b such that the
In Section 4, we show that given a family A ⊂ Lip(X), there exists a metric db on X
b
b
metric topology coincides with the quotient topology on X and such that kf kd = kf kdb for all f ∈ A.
b preserves the metric structure and that A 7→ Ab preserves the
That is to say that the map X 7→ X
Lipschitz structure for the family of functions A. Therefore we may consider the assumption of
separation of points without loss of generality with respect to the Lipschitz norm structure.
The theory of algebras of continuous functions over R is quite different from the corresponding
theory for algebras over C. One type of algebra over R, the so called real function algebras, have an
added layer of topological structure on X. If (X, τ ) is a topological space, a topological involution
on X is a homeomorphism θ : X → X such that θ(θ(x)) = x for all x ∈ X. Given a compact
Hausdorff space (X, τ ) and a topological involution θ : X → X, define
n
o
C(X, θ) = f ∈ C(X) : f (x) = f (θ(x)) for all x ∈ X .
It is straightforward to show that C(X, θ) separates the points of X. Given a family A ⊂ C(X, θ),
the homeomorphism θ introduces a new layer of structure to be analyzed when A does not separate
d is a topological
b x) = θ(x)
b →X
b defined by θ(b
points. We show in Section 5 that the mapping θb: X
b
b
b
b
involution on X and A ⊂ C(X, θ), so that assuming separation of points is also without loss of
generality for subsets of real function algebras.
2
Assuming Separation of Points Without Loss of Generality
In this section we give a general framework for when it is possible to assume without loss of
generality that a family of complex-valued functions separates points. We begin by setting up the
notations that will be used throughout, then the known results on compact Hausdorff spaces are
brought together and extended to locally compact Hausdorff spaces.
As noted above, given a set X, a family of complex-valued functions A on X is said to separate
points if for each pair of distinct x, y ∈ X there exists an f ∈ A such that f (x) 6= f (y). If A
separates points and for each x ∈ X there exists an f ∈ A with f (x) 6= 0, then A is said to strongly
separate points.
We shall denote a set X equipped with a topology τ by the ordered pair (X, τ ). The set
of bounded, complex-valued (resp. real-valued), continuous functions on X, with respect to the
topology τ , is denoted by C((X, τ ), C) (resp. C((X, τ ), R)). If there is no ambiguity regarding the
topology, we write C(X, C) (resp. C(X, R)), and we write C(X) exclusively to mean the bounded,
complex-valued, continuous functions on X. A subset A ⊂ C(X) is a complex (resp. real) linear
subspace of C(X) if A is closed under pointwise addition and A is closed under complex (resp. real)
scalar multiplication. A subset A ⊂ C(X) is a complex (real. complex) subalgebra of C(X) if A
is closed under pointwise multiplication and A is a complex (resp. real) linear subspace. A family
A ⊂ C(X) is self-adjoint if f ∈ A for all f ∈ A.
Given a family of complex-valued functions A on a set X, the weak topology generated by A is
the topology on X such that the sets f −1 [U ], where f ∈ A and U ⊂ C is open, form a subbase. The
notation (X, τA ) will be used for this topological space. A useful result regarding weak topologies
is that given a point xT0 ∈ X and an open neighborhood U ∈ τA , there exist f1 , . . . , fn ∈ A and an
ε > 0 such that x0 ∈ ni=1 {x ∈ X : |fi (x) − fi (x0 )| < ε} ⊂ U . The weak topology induced by A is
the coarsest topology making each f ∈ A continuous, hence if A ⊂ B are families of complex-valued
functions on X, then τA ⊂ τB . Moreover, if (X, τ ) is a topological space and A ⊂ B ⊂ C((X, τ ), C),
then τA ⊂ τB ⊂ τ .
If A = C(X, C), then we write τC(X,C) for the weak topology on X generated by every complexvalued function that is continuous on (X, τ ). It is straightforward that
τC(X,R) ⊆ τC(X,C) ⊆ τ,
(1)
but, in fact, τC(X,R) = τC(X,C) . This follows from the fact that given a point x0 ∈ X, an ε > 0,
and a function f ∈ C(X, C), the function defined by g = |f − f (x0 )| belongs to C(X, R) and
{x ∈ X : g(x) < ε} = {x ∈ X : |f (x) − f (x0 )| < ε}.
A topological space (X, τ ) is called completely regular if for every x ∈ X and closed set F ⊂
X \ {x} there exists a continuous function f : X → [0, 1] such that f (x) = 0 and f (y) = 1 for all
y ∈ F . If, in addition, it is assumed that singleton sets are closed, then (X, τ ) is called a Tychonoff
space. It is known that a topological space (X, τ ) is completely regular if and only if τ = τC(X,R)
[11, Theorem 14.12], which means that (X, τ ) is completely regular if and only if equality holds
across (1). More generally, given a family A ⊂ C(X, C), it is always true that
τA ⊆ τC(X,C) ⊆ τ,
-2
-1
1
2
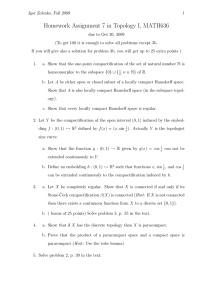
Figure 1: We have a family A of 3 functions (represented by solid lines) that do not separate the
points of the domain [−2, 2]. The equivalence classes generated by A are [−2, −1] ∪ [1, 2], {0},
and sets of the form {x, −x} for x ∈ (0, 1). A fourth function is also pictured (represented by a
dotted line), and this function is constant on the equivalence classes generated by A. Therefore
this additional function is an element of Cϕ .
so τA = τ implies that τ = τC(X,C) . Hence, we have the following lemma.
Lemma 1. Let (X, τ ) be a topological space and let A ⊂ C(X, C) be a family. If τ = τA , then
(X, τ ) is completely regular.
2.1
Separation of Points on a General Topological Space
We detail the process of “quotienting out” by separation points that is noted in the introduction.
Given any topological space (X, τ ) and a family A ⊂ C(X), define an equivalence relation ∼ on X
by x ∼ y if and only if f (x) = f (y) for all f ∈ A. The set of equivalence classes of ∼ is denoted by
b and the equivalence class containing x by x
X
b. The quotient map is given by ϕ(x) = x
b; note that
ϕ is surjective but is injective if and only if A already separates points. It is also worth noting that
C(X) itself need not separate points, for example if (X, τ ) is not a Hausdorff space (cf. [6, Lemma
1.2.1 (a)]). Though the results are all stated for families of functions assuming complex scalars, the
analogous results with real scalars also hold.
Let x ∈ X, then every function f ∈ A is constant on the set x
b, but it is certainly possible that
there are more continuous functions, not in A, that are also constant on x
b. We denote by
Cϕ = {f ∈ C(X) : f is constant on the fibers of ϕ}
n
o
b
= f ∈ C(X) : f is constant on each set x
b∈X
the collection of all continuous functions on (X, τ ) that are constant on each of the sets x
b associated
with A. This is just to say that the functions in Cϕ are the functions in C(X) such that, if added to
A, the equivalence classes would not change. Note that Cϕ ⊂ C(X) is a complex subalgebra that
contains the complex constant functions, is self-adjoint, is complete with respect to the uniform
norm, and satisfies A ⊂ Cϕ ⊂ C(X).
The set Cϕ is most easily understood through a simple example. Figure 1 shows a family A of
three functions on the domain [−2, 2]. Each of these functions is constant on the sets [−2, −1]∪[1, 2]
and {0}, as well as on each doubleton of the form {−x, x} for x ∈ (0, 1), so these sets are exactly the
equivalence classes with respect to the quotient map ϕ. Additionally pictured is a fourth function
that is constant on each of the equivalence classes of A, thus this function is an element of Cϕ .
Note that Cϕ is the largest family of continuous functions on X with the same equivalence classes
as A.
b → C by fb(b
Given f ∈ Cϕ , define the function fb: X
x) = f (x). Note that fb is well-defined,
b with the property that fb ◦ ϕ = f . Set
as f (y) = f (x) for any y ∈ x
b, thus fb is a function on X
b
b
b
A = {f : f ∈ A}, then the mapping f 7→ f is a one-to-one, uniform norm preserving correspondence
b The reason for analyzing Cϕ is that the map f 7→ fb, defined for f ∈ A, naturally
between A and A.
extends to all f ∈ Cϕ . Thus we will use the notation fb for f ∈ A or for f ∈ Cϕ , since the “hat”
notation is well-defined and carries the same meaning in both cases. The notation can be applied
cϕ = {fb: f ∈ Cϕ }. By construction, Ab separates points, and,
to the full collection Cϕ , so we set C
cϕ , it is also true that C
cϕ separates points. Define the mappings Φ : Cϕ → C
cϕ by
since Ab ⊂ C
cϕ → Cϕ by Ψ(fb) = fb ◦ ϕ = f . It is straightforward to see that Ψ and Φ are
Φ(f ) = fb and Ψ : C
inverses of each other. Additionally, Ψ is a composition operator, which means it is linear and
multiplicative. As the inverse of Ψ, Φ is also linear and multiplicative. Both mappings preserve
the constant functions and kf k∞ = kΦ(f )k∞ holds for all f ∈ Cϕ .
The set Cϕ is the collection of all continuous functions on (X, τ ) that are constant on each of
cϕ should contain all of the continuous functions on
the sets x
b ⊂ X. Intuitively, this means that C
b with respect to an appropriate topology. The quotient map ϕ induces the quotient topology on
X,
b which we denote by τb = {U ⊂ X
b : ϕ−1 (U ) ∈ τ }. This is the finest topology on X
b under which
X,
b that gives
ϕ is continuous, and it is a topology on X
cϕ = C X,
b τb , C .
Φ [Cϕ ] = C
b τb), C) [11, Theorem
To see this, note that for f ∈ Cϕ we have fb ◦ ϕ = f , which implies fb ∈ C((X,
cϕ ⊂ C((X,
b τb), C). On the other hand, for fb ∈ C((X,
b τb), C), the function fb◦ϕ : X → C
9.4], so Ab ⊂ C
b
b
cϕ , hence
is continuous and constant on each x
b ∈ X, thus f ◦ ϕ ∈ Cϕ . This implies that Φ(fb◦ ϕ) ∈ C
b τb), C) is a uniform-norm
b τb), C) = C
cϕ = Φ[Cϕ ]. Consequently, the mapping Φ : Cϕ → C((X,
C((X,
isometric algebra isomorphism. Moreover, if A is a complex linear subspace or subalgebra, then
b τb), C) is a complex linear subspace or subalgebra, respectively.
Ab = Φ[A] ⊂ C((X,
b to be considered is the weak topology on X
b generated by C
cϕ , which
Another topology on X
c
b
cϕ ⊂
we recall is denoted τCcϕ . As Cϕ = C((X, τb), C), it must be that τCcϕ ⊂ τb. Note that C
b τ c ), C) and, as the quotient mapping is a continuous function when it is considered as a
C((X,
Cϕ
b τ c ), we have that fb ◦ ϕ ∈ C(X) for each fb ∈ C((X,
b τ c ), C). Since
mapping from (X, τ ) to (X,
Cϕ
Cϕ
b
b
b
f ◦ ϕ is constant on each x
b ∈ X, it is also true that f ◦ ϕ ∈ Cϕ , and it follows that
cϕ = C
Φ [Cϕ ] = C
b τc ,C .
X,
Cϕ
b τ c ), C) is a uniform-norm isometric algebra isomorphism and
Thus the mapping Φ : Cϕ → C((X,
Cϕ
b
b
A = Φ[A] ⊂ C((X, τ c ), C) is a complex linear subspace or subalgebra, when A is a complex linear
Cϕ
subspace or subalgebra, respectively.
By the preceding paragraphs,
b τc ,C = C
cϕ = C X,
b τb , C .
C X,
Cϕ
(2)
From the standpoint of algebraic structure, there is no difference between choosing the quotient
topology τb or the weak topology τCcϕ , nonetheless the two topologies need not coincide (cf. [2,
Section 3J]) and result in different structures. Thus, to truly make the assumption that A separates
points “without loss of generality,” there are some topological questions that one must consider.
First, it must be chosen which topology, τCcϕ or τb, is most appropriate. Again, from an algebraic
stand point there is no difference, but the weak topology τCcϕ has an advantage in that given a net
b and a point x
b then x
{c
xλ }λ∈Λ ⊂ X
b ∈ X,
cλ → x
b (with respect to τ c ) if and only if fb(c
xλ ) → fb(b
x)
Cϕ
cϕ . In other words, net convergence in (X,
b τ c ) is completely determined by C
cϕ . Once
for all fb ∈ C
Cϕ
b is equipped with this topology,
an appropriate topology is chosen, it must be shown that when X
b τb) are always
b τ c ) and (X,
the relevant topological properties of X are preserved. In general, (X,
Cϕ
cϕ separates points. Additionally, Lemma 1 implies that (X,
b τ c ) is a completely
Hausdorff, since C
Cϕ
b τ c ) is a Tychonoff space. For the case A = C(X), Gillman
regular space and, consequently, (X,
Cϕ
b
b τ c ), C)
and Jerison demonstrated that (X, τ c ) is a Tychonoff space and that C(X) and C((X,
Cϕ
Cϕ
are isometrically isomorphic [2, Theorem 3.9]. Combining all of the results of this section, we give
the following extension of their result.
Theorem 2. Let (X, τ ) be a topological space and let A ⊂ C(X) be a non-empty family. Then
b τ c ) is a Tychonoff space and the mapping
(X,
Cϕ
b τ c ), C) → Cϕ
Ψ : C((X,
Cϕ
defined by Ψ(fb) = fb ◦ ϕ is a uniform-norm isometric algebra isomorphism.
Remark 1. The conclusions of this theorem do not seem to have anything to do with the family A
of the hypothesis, but in fact they do. Recall that
n
o
b
Cϕ = f ∈ C(X) : f is constant on each set x
b∈X
and each equivalence class x
b is defined by the fact that it is a set on which every f ∈ A is
constant. Thus the family A generates the equivalence classes, which then induce Cϕ . Since
cϕ = C((X,
b τ c ), C), we have Ψ[A]
b = A, which implies that A and Ab are in a uniform norm
Ab ⊂ C
Cϕ
preserving, one-to-one correspondence. Moreover, if A is a complex (resp. real) linear subspace
or subalgebra, then Ab is a complex (resp. real) linear subspace or subalgebra, respectively. We
note that the mapping Ψ(fb) = fb ◦ ϕ is the homomorphism induced by ϕ and properties of such
homomorphisms are studied in [7].
2.2
Separation of Points on Compact Hausdorff Spaces
Let (X, τ ) be a compact Hausdorff space. Separation of points in this classical case is wellunderstood, but few references contain a comprehensive treatment. The primary purpose of this
section is to bring together results from a wide range of sources, and to give a unified treatment
of separation of points on compact Hausdorff spaces, providing many of the relevant references to
original and early work.
For a family A ⊂ C(X), one of the early treatments of separation of points on compact Hausdorff
spaces was given by Rickart. As a consequence of his results, in particular Lemma 3.2.15 in [8],
b τb) is also a compact Hausdorff space. We note that this fact follows
it can be shown that (X,
b τb) is already known to be Hausdorff and the
immediately from the framework given above, as (X,
c
quotient mapping ϕ is continuous. Since Cϕ separates points, we have that τCcϕ and τb coincide [6,
Lemma 1.2.1 (b)]. Hence there is no difference between choosing the quotient topology τb or the weak
cϕ . The relevant topological structures of (X, τ ) are preserved in either
topology τCcϕ induced by C
case, and it is truly without loss of generality that we assume A separates points. Additionally, as
b τ c ), C) and C((X,
b τb), C)
there is no ambiguity regarding the topology, we will refer to both C((X,
Cϕ
b We now restate Theorem 2 in the case where (X, τ ) is a compact Hausdorff space.
by C(X).
Theorem 3. Let (X, τ ) be a compact Hausdorff and let A ⊂ C(X) be a non-empty family. Then
b τ c ) is a compact Hausdorff space,
(i) (X,
Cϕ
cϕ and the quotient topology induced by ϕ coincide, and
(ii) the weak topology generated by C
b → Cϕ defined by Ψ(fb) = fb ◦ ϕ is a uniform-norm isometric algebra
(iii) the mapping Ψ : C(X)
isomorphism.
b appears in several texts (cf.
For complex subalgebras A ⊂ C(X), the construction of Ab and X
Conway [1, Exercise V.8.4] and Leibowitz [6, Exercise 3.2.7]). Typically, this appears in a section
on the Stone-Weierstrass theorem, which states that if a complex subalgebra A ⊂ C(X) contains
the constant functions, separates points, is self-adjoint, and is closed with respect to k · k∞ , then
A = C(X). If the assumption of separation of points is dropped, then Ab is a complex subalgebra
b According to
that satisfies the hypothesis of the Stone-Weierstrass theorem, hence Ab = C(X).
the comments following Lemma 3.2.15 in [8], this result is essentially due to Stone [9, Theorem
87]. Using this fact, we have the following characterization of the complex subalgebras that almost
satisfy the Stone-Weierstrass theorem.
Lemma 4. Let X be a compact topological space and let A ⊂ C(X) be a complex subalgebra that
contains the constant functions, is self-adjoint, and is closed with respect to the uniform norm.
Then A = Cϕ .
b is a complex subalgebra that contains the
Proof. It is straightforward to show that Ab ⊂ C(X)
constant functions, is self-adjoint, and separates points. The completeness of A with respect to
b so Ab = C(X)
b by the Stonek·k∞ on X implies Ab is complete with respect to the uniform norm on X,
b = Ψ[C(X)]
b = Cϕ .
Weierstrass theorem. The conclusion follows by Theorem 3, since A = Ψ[A]
Llavona and Jaramillo give results similar to Lemma 4. In particular, Lemma 4 is the complex
version of Proposition 1.6 (1) in [7].
2.3
Separation of Points on Locally Compact Spaces
Within the framework described in Section 2.1, we can extend the list of structures that are preb and A 7→ A.
b In this section we show that the case where (X, τ ) is
served by the mappings X 7→ X
a locally compact Hausdorff (but not compact) is not the same as the case where (X, τ ) is compact
Hausdorff.
The first difference between the compact and locally compact cases is straightforward, in that
continuous functions on locally compact Hausdorff spaces need not be bounded. Thus we require
that the family of functions A be a subset of C0 ((X, τ ), C), the complex-valued, continuous functions
on X that vanish at infinity. In particular, a function f is an element of C0 ((X, τ ), C) if and only if
f is continuous and given ε > 0, the set {x ∈ X : |f (x)| ≥ ε} is compact. Again, we write C0 (X, C)
or C0 (X, R) when there is no ambiguity regarding the topology, and we write C0 (X) to exclusively
mean the complex-valued functions that vanish at infinity. Note that C0 (X) ⊂ C(X) and if (X, τ )
is compact, then C0 (X, C) = C(X, C).
b τb)
The second difference between the compact case and the locally compact case is that (X,
b
need not be locally compact, whereas (X, τ ) being compact implies that (X, τb) is compact. This
fact that is demonstrated by a simple example.
Example 5. Let X = R2 ; equip X with the usual topology; and let A = {f ∈ C0 (R2 ) : f (x, 0) =
b ∈X
b
0, for all x ∈ R}. Set X = {(x, 0) : x ∈ R}. It can be shown that the point ϕ((0, 0)) = X
b τb) is not locally compact.
cannot have a compact neighborhood with respect to τb, hence (X,
b τb) is locally compact, such as when ϕ is an open
There are criteria which ensure that (X,
mapping [11, Theorem 18.5]. Additionally, if for each x ∈ X, there exists an f ∈ A such that
b τb) is locally compact.
f (x) 6= 0, then (X,
Lemma 6. Let (X, τ ) be a locally compact Hausdorff space and let A ⊂ C0 (X) be a non-empty
b τb) is a locally
family such that for each x ∈ X, there exists an f ∈ A such that f (x) 6= 0. Then (X,
compact Hausdorff space.
b τb) is Hausdorff, it is enough to demonstrate that each x
b has a compact
Proof. As (X,
b0 ∈ X
b
neighborhood. Indeed, let x
b0 ∈ X, then there exists an f ∈ A such that f (x0 ) 6= 0. Since
f ∈ C0 (X), the set {x ∈ X : |f (x)| ≥ |f (x0 )|/2} is compact. As the quotient map is continuous,
the set
b : |fb(b
ϕ [{x ∈ X : |f (x)| ≥ |f (x0 )|/2}] = {b
x∈X
x)| ≥ |f (x0 )|/2}
b τb), C), so the set {b
b : |fb(b
is compact. Moreover, fb = Φ(f ) ∈ C((X,
x∈X
x)| > |f (x0 )|/2} is open.
b : |fb(b
Therefore, {b
x∈X
x)| ≥ |f (x0 )|/2} is a compact neighborhood of x
b0 .
In light of this lemma, for the remainder of this section we shall assume that for each x ∈ X,
there exist an f ∈ A such that f (x) 6= 0. Note that this is equivalent to assuming that for each
b there exists an fb ∈ Φ[A] = Ab such that fb(b
x
b ∈ X,
x) 6= 0, i.e. that Ab strongly separates points.
For a family A ⊂ C0 (X), the collection Cϕ is no longer appropriate, as the functions in Cϕ need
not belong to C0 (X). Thus, we define
Cϕ0 = Cϕ ∩ C0 (X),
Note that A ⊂ Cϕ0 ⊂ C0 (X) and that Cϕ0 is a complex subalgebra that is self-adjoint and closed
d
c
b b), C), it is immediate that τ d ⊂ τb.
with respect to the uniform norm. As C
ϕ0 ⊂ Cϕ = C((X, τ
Cϕ0
b
d
Given f ∈ Cϕ and ε > 0,
0
b : |fb(b
ϕ[{x ∈ X : |f (x)| ≥ ε}] = {b
x∈X
x)| ≥ ε},
b : |fb(b
and, as ϕ is continuous, the set {b
x∈X
x)| ≥ ε} is compact with respect to τb. This implies
b
d
b
that A ⊂ Cϕ0 ⊂ C0 ((X, τb), C). Since we have assumed for that for each x ∈ X, there exists an
d
f ∈ A such that f (x) 6= 0, we have that Ab strongly separates points. Consequently, the set C
ϕ0
d
also strongly separates points. This implies that the weak topology generated by Cϕ0 coincides
c
d
with τb (see [3, Proposition 2.2.14] or [10, Lemma 7.3]), so C
ϕ0 ⊂ Cϕ implies that τC
cϕ also coincides
b we will refer to C0 ((X,
b τb), C) by
with τb. As there is no ambiguity regarding the topology on X,
b
b
d
C0 (X). Finally, we note Cϕ0 is a self-adjoint subalgebra of C0 (X) that strongly separates points
b
d
and is closed with respect to k · k∞ , thus by the Stone-Weierstrass theorem Φ[Cϕ0 ] = C
ϕ0 = C0 (X).
We are now in a position to restate Theorem 2, in the case where (X, τ ) is a locally compact
Hausdorff space and A ⊂ C0 (X) is a family such that for each x ∈ X there exists an f ∈ A such
that f (x) 6= 0.
Theorem 7. Let (X, τ ) be a locally compact Hausdorff space and let A ⊂ C0 (X) be a non-empty
family such that for each x ∈ X, there exists an f ∈ A such that f (x) 6= 0. Then
b
d
b τ d ) is a locally compact Hausdorff space, where Cϕ = Cϕ ∩ C0 (X) and C
(i) (X,
ϕ0 = {f : f ∈
0
Cϕ0
Cϕ0 },
d
(ii) the weak topology generated by C
ϕ0 and the quotient topology induced by ϕ coincide, and
b → Cϕ defined by Ψ(fb) = fb◦ ϕ is an uniform-norm isometric algebra
(iii) the mapping Ψ : C0 (X)
0
isomorphism.
Thus again in this case it is without loss of generality that we assume A separates points,
provided that the functions in A vanish at infinity but not all at any point of X. The results of
this section are based on classical ideas, and there are two purposes behind including them here.
The first is to provide a self-contained reference on the classical study of separation of points on
compact Hausdorff, bringing together results from the different original sources and extending to
the locally compact Hausdorff case. The second purpose is to provide a backdrop for the remaining
sections, where we show that assuming separation of points is without loss of generality with respect
to several other properties of function algebras that are important to study.
3
Separation of Points and Boundaries of Generalized Weak Peak
Points
In this section we continue with the study of separation of points for families of functions on locally
compact Hausdorff spaces. Whereas in the previous section the study focused on the topological
b we now shift and begin a further
structure of X that was preserved under the mapping X 7→ X,
b
study of properties of A that are preserved by the mapping A 7→ A.
Let (X, τ ) be a locally compact Hausdorff space and A ⊂ C0 (X), any family of functions. Given
f ∈ A, the maximizing set of f is the set of points in X where f attains its maximum modulus,
i.e. the set M (f ) = {x ∈ X : |f (x)| = kf k∞ }. A boundary for A is a subset B ⊂ X such that
every f ∈ A attains its maximum modulus on B. In other words, a set B ⊂ X is a boundary
for A if and only if M (f ) ∩ B 6= ∅ for every f ∈ A. It is important to note, initially, that we
are not assuming any algebraic structure on A nor that B is closed. Every complex subalgebra of
C0 (X) that strongly separates points has a unique minimal closed boundary, known as the Shilov
boundary (see [3, Theorem 3.3.2]), a result that does not carry over to real subalgebras of C0 (X).
When A is not an algebra, but only a family of functions, there still exist minimal closed boundaries
(with respect to inclusion), but they need not be unique [5, Lemma 3.6].
Suppose that x ∈ X is such that f (x) = 0 for every f ∈ A. Then the only function to attain
its maximum modulus at x is the identically 0 function, which implies that any such points are
irrelevant to the study of maximizing sets. Thus, in the remainder of this section, we assume that
there are no points that every f ∈ A maps to 0, and this is without loss of generality due to the fact
that such points are not contained in nontrivial maximizing sets (as opposed to being without loss
b τ d ) = (X,
b τb) is
of generality with respect to the quotient map). Hence Theorem 7 implies that (X,
Cϕ0
b and Cϕ are uniform norm isometrically isomorphic.
a locally compact Hausdorff space and C0 (X)
0
b It is
Consequently, we have that A is in a one-to-one, uniform norm preserving bijection with A.
b
b
worth mentioning that the Shilov boundary for A always exists, since A strongly separates points,
regardless if A has a unique minimal closed boundary or not.
A set E ⊂ X is called an m-set for A if it is the intersection of maximizing sets of functions in
A, i.e. E is an m-set for A if there exists a family S ⊂ A such that E = ∩f ∈S M (f ). If E is an
m-set, and there is no m-set strictly contained in E, then E is called a minimal m-set. Any point
contained in a minimal m-set is called a generalized strong boundary point. If an m-set E = {x0 }
is a singleton, then it is clearly minimal, and x0 is called a weak peak point or a strong boundary
point, a term classically used in the study of function algebras. If A ⊂ C0 (X), then the collection
of generalized strong boundary points always forms a boundary for A [5, Lemma 3.5].
b
We now document how these points and sets in the domain of X correspond to those in X
via the quotient map ϕ. The maximizing sets, m-sets, minimal m-sets and generalized weak peak
points are preserved in one-to-one correspondence. It is possible that certain minimal m-sets that
are not singletons are mapped to ones that are. Thus there can be more weak peak points for
Ab than for A. Minimal m-sets that are not singletons are important features of the family. To
articulate these facts, consider the quotient map ϕ as a map between the subsets of X and those
b This map is not bijective on the subsets, unless ϕ is injective, but ϕ is (in the sense of a set
of X.
map) bijective between these special collections of subsets.
Theorem 8. Let (X, τ ) be a locally compact Hausdorff space and A ⊂ C0 (X) a non-empty family
of functions such that for each x ∈ X, there exists an f ∈ A such that f (x) 6= 0. Then the following
collections of underlying sets are in bijective correspondence via ϕ:
b
(i) The maximizing sets of A and A.
b
(ii) The m-sets of A and A.
b
(iii) The minimal m-sets of A and A.
Consequently, if δA is the collection of generalized strong boundary points for A, then ϕ [δA] is the
b
collection of generalized strong boundary points for A.
Proof. Clearly, f (x) = fb(ϕ(x)) for all x ∈ X by the definition of ϕ and fb. Additionally, kf k∞ =
kfbk∞ . Thus for all f ∈ A,
ϕ[M (f )] = {ϕ(x) : x ∈ X, |f (x)| = kf k∞ }
o
n
= ϕ(x) : x ∈ X, fb(ϕ(x)) = fb
∞
o
n
b b
b
= x
b ∈ X : f (b
x) = f = M fb ,
∞
b
which proves that ϕ maps the maximizing sets of A onto the maximizing sets
of A. To see that ϕ
b
is injective on this collection, suppose that ϕ[M (f )] = ϕ[M (g)]. Then M f = M (b
g ), so for any
x ∈ M (f ), ϕ(x) ∈ M (fb) = M (b
g ) which implies x ∈ M (g). By exchanging the roles of f and g in
this argument, we have M (f ) = M (g). Thus ϕ[M (f )] = ϕ[M (g)] implies M (f ) = M (g), i.e., ϕ is
injective on maximizing
sets and ϕ−1 [M (fb)] = M (f ) for all f ∈ A, proving (i).
T
For (ii), let α M (fα ) be an arbitrary m-set of A. Using the above we have,
##
"
#
"
#
"
"
h i
\
\
\ −1
−1
ϕ
M (fα ) = ϕ
=ϕ ϕ
M fbα
ϕ
M fbα
α
α
=
\
α
M (fbα ),
α
T
T
where the last step uses the surjectivity of ϕ. The fact that ϕ−1 [ α M (fbα )] = α M (fα ) is
immediate.
b If
that (iii) holds, let E be a minimal m-set
of A. Then ϕ[E] is an m-set of A.
T
T To see
−1
b
we have α M (fα ) ⊂ E, which gives equality since E is
α M (fα ) ⊂ ϕ[E] then by applying ϕ
T
minimal. This in turn gives equality of α M (fbα ) and ϕ[E] which proves minimality. A similar
argument gives the other
S direction.
Finally, since δA = {E ⊂ X : E is a minimal m-set in A} we may apply ϕ and ϕ−1 to obtain,
b = δA.
ϕ[δA] = δ Ab and ϕ−1 [δ A]
Again it is important to note that, while the minimal m-sets are in one-to-one correspondence,
the weak peak points need not be. That being said, the weak peak points for Ab are the images of
minimal m-sets for A.
We have the following corollary regarding the subalgebra Cϕ ∩ C0 (X) = Cϕ0 ⊂ C0 (X).
Corollary 9. Let (X, τ ) be a locally compact Hausdorff space and A ⊂ C0 (X) a non-empty family
of functions such that for each x ∈ X, there exists an f ∈ A such that f (x) 6= 0. Then the following
collections of underlying sets are in bijective correspondence via ϕ:
d
b
(i) The maximizing sets of Cϕ0 and Φ[Cϕ0 ] = C
ϕ0 = C0 (X).
b
(ii) The m-sets of Cϕ0 and C0 (X).
b
(iii) The minimal m-sets of Cϕ0 and C0 (X).
Consequently, if δCϕ0 is the collection of generalized strong boundary points for Cϕ0 , then ϕ[δCϕ0 ]
b
is the collection of generalized strong boundary points for C0 (X).
The results in this section are for families A on locally compact spaces, but, as C(X) = C0 (X)
when (X, τ ) is compact, the results here also hold for families on compact Hausdorff spaces.
4
Preservation of Lipschitz Norm Structure
As was shown above, given a family of functions on a compact Hausdorff space, we may assume
separation of points without loss of generality with respect to algebraic structure, boundaries, and
the uniform norm. In many cases, however, there is other norm structure of interest, and it is
natural, and important, to ask if the mapping A →
7 Ab preserves norms other than the uniform
norm. Let (X, d) denote a set X equipped with a metric d. The collection of complex-valued
Lipschitz functions on X is the set
Lip(X) = {f ∈ C(X) : Ld (f ) < ∞} ,
o
n
(y)|
:
x,
y
∈
X,
x
=
6
y
is the Lipschitz constant of f . When (X, d) is a
where Ld (f ) := sup |f (x)−f
d(x,y)
compact metric space, it is well-known that Lip(X) is a subalgebra of C(X) that is complete with
respect to the norm kf kd = max{kf k∞ , Ld (f )}.
For a compact metric space (X, d) and a non-empty family A ⊂ Lip(X), Theorem 3 yields that
b
(X, τCcϕ ) is a compact Hausdorff space and that τCcϕ coincides with the quotient topology induced by
b
ϕ. Moreover, the mapping fb 7→ f is a uniform norm isometric algebra isomorphism between C(X)
b
and Cϕ . As a consequence, A and A are in a one-to-one, uniform norm preserving correspondence.
Again, the collection Cϕ is no longer appropriate in this setting, as the functions in Cϕ need not
be Lipschitz. Thus, we define
Lipϕ = Lip(X) ∩ Cϕ
b
[ϕ = Φ[Lipϕ ] = {fb: f ∈ Lipϕ }. In this section, we show that there exists a metric db on X
and set Lip
b and Ld (f ) = L b(fb)
[ϕ = Lip(X),
such that the metric topology generated by db coincides with τb, Lip
d
holds for all fb ∈ Lipϕ . As a consequence, we have that the mapping A 7→ Ab preserves the Lipschitz
norm, and it is without loss of generality that we assume a family of Lipschitz functions separates
points.
b is a singleton, and
It is clear that if every f ∈ A has the property that Ld (f ) = 0, then X
the result follows. Thus, for the remainder of this section, we will assume that A contains at least
one element with a non-zero Lipschitz constant. First, we demonstrate that the topological space
b τb) is metrizable.
(X,
Lemma 10. Let (X, d) be a compact metric space and let A ⊂ Lip(X) be a non-empty family that
contains at least one element with a non-zero Lipschitz constant. Then
|f (x) − f (y)|
b
d(b
x, yb) = sup
: f ∈ A, Ld (f ) > 0
Ld (f )
b such that the metric topology generated by db coincides with the quotient
defines a metric on X
b
topology on X generated by ϕ.
b ×X
b → R+ by
Proof. Define db: X
b x, yb) = sup
d(b
|f (x) − f (y)|
: f ∈ A, Ld (f ) > 0 .
Ld (f )
Note that db is well defined as f (x) = f (z) for any f ∈ A and any z ∈ x
b. We claim that db is a
b
b
b x, yb) ≥ 0, and that
b
b
metric on X. Indeed, given x
b, yb ∈ X, it is clear that d(b
x, yb) = d(b
y, x
b), that d(b
b x, yb) = 0 if x
b x, yb) = 0, then |f (x) − f (y)| = 0 for all f ∈ A with Ld (f ) > 0. As
d(b
b = yb. If d(b
f (x) = f (y) for any f ∈ A with Ld (f ) = 0, we have that f (x) = f (y) for all f ∈ A, giving x
b = yb.
b
Next, given x
b, yb, zb ∈ X,
|f (x) − f (y)|
|f (x) − f (z)| |f (z) − f (y)|
b x, zb) + d(b
b z , yb)
≤
+
≤ d(b
Ld (f )
Ld (f )
Ld (f )
b x, yb) ≤ d(b
b x, zb) + d(b
b z , yb). Consequently, db is
holds for all f ∈ A with Ld (f ) > 0, which yields that d(b
b
a metric on X.
Finally, given x, y ∈ X,
|f (x) − f (y)|
≤ d(x, y)
Ld (f )
b
b x, yb) ≤ d(x, y) holds for all x, y ∈ X,
holds for all f ∈ A with Ld (f ) > 0. Hence d(ϕ(x),
ϕ(y)) = d(b
b
which proves that ϕ is continuous with respect to d. As ϕ is a continuous mapping from a compact
b it is a closed mapping. Therefore, the metric topology
b d),
space (X, d) to a Hausdorff space (X,
b
generated by d coincides with the quotient topology generated by ϕ by [11, Theorem 9.2].
Using Lemma 10, we can demonstrate for a family A ⊂ Lip(X) that the Lipschitz constant for
each f ∈ A is preserved.
Lemma 11. Let (X, d) be a compact metric space and let A ⊂ Lip(X) be any non-empty family
that contains at least one element with a non-zero Lipschitz constant. Then Ld (f ) = Ldb(fb), where
db is the metric defined by
b x, yb) = sup |f (x) − f (y)| : f ∈ A, Ld (f ) > 0 .
d(b
Ld (f )
b then fb
Proof. Let f ∈ A. If Ld (f ) = 0, then f is constant on X. Since fb(b
x) = f (x) for all x
b ∈ X,
b
b
is constant on X, giving Ldb(f ) = 0. If Ld (f ) 6= 0, then
b
x) − fb(b
y )
f (b
|f (x) − f (y)|
b x, yb)
=
≤ d(b
Ld (f )
Ld (f )
b This implies that L b(fb) ≤ Ld (f ) < ∞, i.e. fb ∈ Lip(X),
b and Ab ⊂ Lip(X).
b
holds for all x
b, yb ∈ X.
d
b x, yb) ≤ d(x, y) by the proof of Lemma 10,
Since d(b
b
b(b
f
(b
x
)
−
f
y
)
|f (x) − f (y)|
|f (x) − f (y)|
≤
=
≤ Ldb(fb)
b x, yb)
b x, yb)
d(x, y)
d(b
d(b
b with x
holds for any pair x
b, yb ∈ X
b 6= yb, hence Ld (f ) ≤ Ldb(fb). Therefore Ldb(fb) = Ld (f ).
We now restate Theorem 2 for the case where (X, τ ) is a compact metric space and A ⊂ Lip(X)
is a family that contains at least one element with a non-zero Lipschitz constant.
Theorem 12. Let (X, d) be a compact metric space and let A ⊂ Lip(X) be a family that contains
at least one element with a non-zero Lipschitz constant. Then the metric defined by
|f (x) − f (y)|
b
d(b
x, yb) = sup
: f ∈ Lipϕ , Ld (f ) > 0 ,
Ld (f )
where Lipϕ = Cϕ ∩ Lip(X), satisfies the following:
b is a compact metric space,
b d)
(i) (X,
(ii) the metric topology generated by db and the quotient topology induced by ϕ coincide, and
b → Lipϕ defined by Ψ(fb) = fb◦ϕ is a Lipschitz norm isometric algebra
(iii) the mapping Ψ : Lip(X)
isomorphism. In particular, Ld (f ) = Ldb(fb) for all f ∈ Lipϕ .
Proof. Lemma 10 implies that the metric topology generated by db coincides with the quotient
b ϕ) is a compact Hausdorff space by Theorem 3, proving
topology induced by ϕ. Moreover, (X,
both (i) and (ii).
Since Lipϕ ⊂ Lip(X) satisfies Lemma 11, we have for any f ∈ Lipϕ that Ld (f ) = Ldb(Φ(f )) =
b and kf kd = kΦ(f )kd for all
[ = Φ[Lip ] ⊂ Lip(X)
L b(fb) for all f ∈ Lip . This yields that Lip
d
ϕ
ϕ
ϕ
b and Lip
b then
[ϕ coincide. Indeed, let fb ∈ Lip(X),
f ∈ Lipϕ . Thus, it is only to show that Lip(X)
fb ◦ ϕ ∈ Cϕ . Moreover, we have
b x, yb)
L b(fb) · d(b
|(fb ◦ ϕ)(x) − (fb ◦ ϕ)(y)|
|fb(b
x) − fb(b
y )|
=
≤ d
≤ Ldb(fb) < ∞
d(x, y)
d(x, y)
d(x, y)
b
[ϕ = Φ[Lipϕ ] = Lip(X).
for all x, y ∈ X. Therefore, fb ◦ ϕ ∈ Lipϕ and, consequently, Lip
5
Separation of Points for Real Function Algebras
We conclude with an analysis of another class of algebras that can be studied with the assumption
of separation of points without losing generality.
Let (X, τ ) be a compact Hausdorff space and let θ : X → X be a topological involution, i.e. a
homeomorphism such that θ ◦ θ is the identity map on X. Define
n
o
C(X, θ) = f ∈ C(X) : f (x) = f (θ(x)) for all x ∈ X .
Note the change in notation here, as the second argument is an involution, rather than the codomain
of the functions involved, as it was in the previous sections. We use this notation here, as it is the
standard notation in the study of real function algebras [4].
It is straightforward to demonstrate that C(X, θ) is a real subalgebra of C(X). The collection
C(X, θ) and real subalgebras of C(X, θ) were the main objects of study for Kulkarni and Limaye
in [4], where it is proven that C(X, θ) separates the points of X [4, Lemma 1.3.7]. Given a family
A ⊂ C(X, θ), the topological involution θ adds a new structure to be analyzed and it is natural to
b interacts with θ.
ask how the mapping X 7→ X
Since (X, τ ) is a compact Hausdorff space, for a non-empty family A ⊂ C(X, θ) Theorem 3
cϕ coincides with the quotient topology
b τ c ) is a compact Hausdorff space and C
yields that (X,
Cϕ
induced by ϕ. Moreover, the mapping fb 7→ f is a uniform norm isometric algebra isomorphism
b and Cϕ . As a consequence, A and Ab are in a one-to-one, uniform norm preserving
between C(X)
correspondence. Once more, the algebra Cϕ is not appropriate, as Cϕ is not necessarily contained
in C(X, θ). Define
Cθ = Cϕ ∩ C(X, θ).
Note that Cθ ⊂ C(X, θ) is a real subalgebra that contains the real constant functions, is self-adjoint,
cθ = Φ[Cθ ] = {fb: f ∈ Cθ }. In this section,
and is closed with respect to the uniform norm. Let C
b → X
b that satisfies θb ◦ ϕ = ϕ ◦ θ and
we show that there exists a topological involution θb: X
b
c
b
Cθ = C(X, θ). Consequently, it is without loss of generality to assume that a family A ⊂ C(X, θ)
separates points.
Lemma 13. Let (X, τ ) be a compact Hausdorff space; let θ : X → X be a topological involution;
d
b x) = θ(x)
b →X
b defined by θ(b
and let A ⊂ C(X, θ) be a non-empty family. Then the mapping θb: X
b
b θ).
is a topological involution that satisfies θb ◦ ϕ = ϕ ◦ θ and Ab ⊂ C(X,
d Given x ∈ X, we have θ(b
d so θ(ϕ(x))
b x) = θ(x).
b x) = θ(x),
b
b →X
b by θ(b
Proof. Define θb: X
= ϕ(θ(x)).
b
b
Consequently θ ◦ ϕ = ϕ ◦ θ. For any x
b ∈ X,
d = θ(θ(x))
\ =x
b θ(b
b x)) = θ(
b θ(x))
θ(
b,
b and that θb is a bijection on X.
b
which shows that θb ◦ θb is the identity on X
[
b x0 ) = θ(x
b be an open set and let x
b
Let U ⊂ X
b0 ∈ θb−1 [U ], thus θ(b
0 ) ∈ U . Since A separates
b
points and (X, τb) is a compact space, we have that τb coincides with τAb, i.e. τb is the weak topology
generated by Ab [6, Lemma 1.2.1 (b)]. Thus there exist fb1 , . . . , fbn ∈ Ab and an ε > 0 such that
[
θ(x
0) ⊂
n n
o
\
[
b : fbi (b
x
b∈X
x) − fbi θ(x
0 ) < ε ⊂ U.
i=1
Let Vx0 =
zb ∈ Vx ,
Tn
x
i=1 {b
b : |fbi (b
∈X
x) − fbi (b
x0 )| < ε} and note that Vx0 is open neighborhood of x
b0 . Given
b d
[
b
fi θ(z) − fi θ(x0 ) = |fi (θ(z)) − fi (θ(x0 ))| = fi (z) − fi (x0 )
b
b
= |fi (z) − fi (x0 )| = fi (b
z ) − fi (b
x0 ) < ε
d ∈ U . Since θ(
d we have that zb ∈ θb−1 [U ],
b θ(b
b z )) = zb and θ(b
b z ) = θ(z),
for all 1 ≤ i ≤ n, hence θ(z)
−1
−1
which implies Vx0 ⊂ θb [U ]. As θb [U ] contains an open neighborhood for each of its points, θb−1 [U ]
is open. Consequently, θb is continuous and thus a topological involution.
We conclude by noting that for each fb ∈ Ab and for each x
b∈Y,
d = fb(θ(b
b x)),
fb(b
x) = f (x) = f (θ(x)) = fb(θ(x))
b
b θ).
which implies Ab ⊂ C(X,
b →X
b
For a family A ⊂ C(X, θ), Lemma 13 implies that there exists a topological involution θb: X
b Recall that C
cθ ⊂ C(X,
b θ).
cθ = {fb: f ∈ Cθ } and, moreover,
such that θb ◦ ϕ = ϕ ◦ θ and C
b is a real subalgebra that contains the real constant functions, separates points, is
cθ ⊂ C(X,
b θ)
C
b
cθ = C(X,
b θ)
self-adjoint, and is closed with respect the uniform norm. This implies that Φ[Cθ ] = C
[4, Theorem 2.1.14]. Theorem 2 for real function algebras is then:
Theorem 14. Let (X, τ ) be a compact Hausdorff space, let θ : X → X be a topological involution
b →X
b
and let A ⊂ C(X, θ) be a non-empty family. Then there exists a topological involution θb: X
such that
(i) θb ◦ ϕ = ϕ ◦ θ, where ϕ denotes the quotient map,
b where Cθ = Cϕ ∩ C(X, θ), and
cθ = C(X,
b θ),
(ii) C
b → Cθ defined by Ψ(fb) = fb ◦ ϕ is a uniform norm isometric algebra
b θ)
(iii) the mapping Ψ : C(X,
isomorphism.
References
[1] John B. Conway. A Course in Functional Analysis. Springer, 2000.
[2] Leonard Gillman and Meyer Jerison. Rings of Continuous Functions. Springer-Verlag, 1976.
[3] Eberhard Kaniuth. A Course in Commutative Banach Algebras. Graduate Texts in Mathematics. Springer, 2009.
[4] S.H. Kulkarni and B.V. Limaye. Real Function Algebras. Marcel Dekker, Inc., 1992.
[5] Scott Lambert and Aaron Luttman. Generalized strong boundary points and boundaries of
families of continuous functions. Mediterr. J. Math., 9:1–20, 2012.
[6] G. M. Leibowitz. Lectures on Complex Function Algebras. Scott, Foresman and Co., 1970.
[7] J. G. Llanova and J. A. Jaramillo. Homomorphisms between algebras of continuous functions.
Canad. J. Math., LXI(1):132–162, 1989.
[8] C. E. Rickart. General Theory of Banach Algebras. Krieger Pub. Co., 1974.
[9] M. H. Stone. Application of the theory of boolean rings to general topology. Trans. Amer.
Math. Soc., 41:132–162, 1937.
[10] Edgar Lee Stout. The Theory of Uniform Algebras. Bogden and Quigley, Inc., 1971.
[11] Stephen Willard. General Topology. Dover Publications, Inc., 2004.