ALGORITHMS AND MODULI SPACES FOR DIFFERENTIAL EQUATIONS by Maint Berkenbosch
advertisement

Séminaires & Congrès
13, 2006, p. 1–38
ALGORITHMS AND MODULI SPACES FOR DIFFERENTIAL
EQUATIONS
by
Maint Berkenbosch
Abstract. — This article discusses second and third order differential operators. We
will define standard operators, and prove that every differential operator with finite
differential Galois group is a so-called pullback of some standard operator. We will
also give an algorithm concerning certain field extensions, associated with algebraic
solutions of a Riccati equation.
Résumé (Algorithmes et espaces modulaires pour les équations différentielles)
Cet article s’intéresse aux opérateurs différentiels de deuxième et troisième ordre.
Nous introduisons une notion d’opérateur standard, et montrons que tout opérateur
différentiel de groupe de Galois différentiel fini est image inverse d’un opérateur standard. Nous donnons aussi un algorithme concernant certaines extensions de corps,
associées à des solutions algébriques d’une équation de Riccati.
1. Field extensions for Riccati solutions
In this section we consider second order linear differential equations of the form
L : y 00 = ry, r ∈ k(x). Here k(x) is a differential field of characteristic zero, with
d
derivation dx
. The field of constants k is not supposed to be algebraically closed.
We will denote its algebraic closure by k̄. The differential Galois theory gives us
an extension k̄(x) ⊂ K, with K the so called Picard-Vessiot extension, which is the
minimal differential field extension of k(x) which contains a basis {y1 , y2 } (over k̄) of
solutions of L. The solution space k̄hy1 , y2 i := ky1 + ky2 ⊂ K will be denoted V .
2000 Mathematics Subject Classification. — 13N10, 14-04, 33C05, 34xx.
Key words and phrases. — Differential operator, differential Galois theory, algorithms, hypergeometric
functions.
I want to thank Mark van Hoeij and Jacques-Arthur Weil for their contributions to the section on
algorithms for finding pullback functions. Further I want to thank Marius van der Put for his great
help and his many ideas which led to this article, and Jaap Top for his assistance in smoothening
and correcting the text. Parts of this article were written during my stay at the IWR Heidelberg.
The main part of this article can also be found in my PHD thesis [Ber04].
c Séminaires et Congrès 13, SMF 2006
M. BERKENBOSCH
2
The automorphisms of K/k̄(x) which commute with the differentiation constitute the
differential Galois group G.
An interesting class of solutions are the so called Liouvillian solutions. These are
solutions which lie in a Liouvillian extension of k̄(x), which roughly means they can
be written down quite explicitly. For a precise definition of a (generalized) Liouvillian
extension, see [Kap76, p. 39]. Related to this is the Riccati equation, denoted RL ,
0
which is an equation depending on L with as solutions elements of the form u = yy ,
with y a solution of L. In our case it is the equation u2 + u0 = r. We have the
following facts (see [vdPS03, p. 35,104]).
Fact 1.1. — u ∈ K is a solution of RL ⇐⇒ u =
y0
y ,
for some y ∈ V .
0
Fact 1.2. — u = yy is a solution of RL , algebraic of degree m over k̄(x) ⇐⇒ The
stabilisor in G of the line k̄ · y is a subgroup of index m.
The next fact is concerned with Liouvillian solutions of L.
Fact 1.3. — L has a Liouvillian solution ⇐⇒ RL has an algebraic solution.
Let u be an algebraic solution of RL of minimal degree over k(x). We define
the field k 0 to be the minimal field in k such that the coefficients of the minimal
polynomial of u over k̄(x) are elements of k 0 (x). We want to determine k 0 as explicit
as possible. In [HvdP95] bounds on the degree [k 0 : k] are given, depending on the
differential Galois group G of L. We consider G as a subgroup of GL2 (k̄) by its action
on y1 , y2 . It is known that G is an algebraic subgroup of GL2 (k̄). Note that changing
the basis {y1 , y2 } changes G by conjugation. Because in our equation L there is no
first order term, we actually have that G lies in SL2 (k̄), see [Kap76, p. 41]. We have
the following lemma, which is essentially Theorem 5.4 of [HvdP95].
Lemma 1.4. — There are only three cases, with respect to G, for which k 0 can be
different from k. These are (on an appropriate basis):
a
0
∗
(1) G ⊂
| a ∈ k̄ , #G > 2, a subgroup of a torus.
0 a−1
0 −1
i 0
.
,
(2) G = D2SL2 , a group of order 8, with generators
1 0
0 −i
2
(3) G = ASL
4 , a group of order 24.
We remark that in [HvdP95], the group D2SL2 is mistakenly denoted by D4 . We
have D4 6= D2SL2 , and in fact D2SL2 ∼
= Q8 , where Q8 denotes the quaternion subgroup
2
{±1, ±i, ±j, ±k} ⊂ H∗ . The notations D2SL2 and ASL
can be explained as follows.
4
Using the natural homomorphism SL2 → PSL2 , these groups are the inverse image of
D2 ⊂ PSL2 and A4 ⊂ PSL2 respectively. We will treat these three cases separately.
SÉMINAIRES & CONGRÈS 13
PULLBACKS OF DIFFERENTIAL EQUATIONS
3
1.1. Subgroups of a torus. — In this section we consider case (1) of Lemma 1.4.
There are exactly two G-invariant lines in V . These correspond to the two solutions
of RL in k̄(x). Such solutions are called rational.
For the next lemma we need to introduce the second symmetric power of a given
differential equation. This is the differential equation with as solutions, all products
of two solutions of the given equation. For example take L : y 00 = ry, with as basis
of solutions {y1 , y2 }. Then the second symmetric power of L, denoted Sym(L, 2)
is the equation y 000 − 4ry 0 − 2r0 y = 0. It has {y12 , y1 y2 , y22 } as a basis of solutions.
Indeed, {y12 , y1 y2 , y22 } are linearly independent over k (compare [SU93, Lemma 3.5]).
In a similar way one defines higher order symmetric powers Sym(L, n) (see [vdPS03,
Definition 2.24]), which we will use later on. We note that Sym(L, n) can have order
smaller than n + 1. In the proof of the next lemma, we will also use that there is an
action of Gal(k̄/k) on K, which induces an action on V . It acts in the standard way
on k̄(x). For details see [HvdP95].
Lemma 1.5. — Assume we are in case (1) of Lemma 1.4. Then Sym(L, 2) has (up to
constants) a unique non-zero solution H ∈ k(x). If one of the two rational solutions
H0
± cH −1 , for some
of R does not lie in k(x), then the rational solutions of R are 2H
c ∈ k \ k, c2 ∈ k.
Proof. — For the basis {y1 , y2 } for which the representation of G in SL2 is as in
1. we have that y1 y2 is G invariant, so y1 y2 ∈ k̄(x). It is easily seen that up to
constants, this is the only G-invariant solution of Sym(L, 2). For σ ∈ Gal(k̄/k) we
have that σ(y1 y2 ) is another rational solution of the symmetric square, so it must be
a multiple of y1 y2 . Therefore we have a Gal(k̄/k)-invariant line, and thus by Hilbert
theorem 90 an invariant point on this line. After multiplying y1 by a constant, we
0
y10
y20
may suppose H := y1 y2 ∈ k(x). Then H
H = y1 + y2 . The rational solutions of R
y0
y0
are y11 and y22 , and since Gal(k̄/k) acts on the set of solutions of R, each one is fixed
by a subgroup of Gal(k̄/k) of index ≤ 2. Now assume this index is 2, then we can
y0
y0
write y11 =: u =: u0 + du1 , u0 , u1 ∈ k(x), d2 ∈ k, d ∈
/ k, and then y22 = u0 − du1 , so
H0
H
u0
= 2u0 . From u0 + u2 = r ∈ k(x) one deduces that 2u0 = − u11 , so u1 must be
λH −1 , λ ∈ k ∗ . Therefore we can take c = dλ, and clearly
y20
y2
=
H0
2H
− cH −1 .
We note that this gives a way to find in case (1) the rational solutions of the Riccati
equation. Indeed H can be found (for example using Maple), and c can be calculated
H0
by substituting 2H
+ cH −1 into the Riccati equation.
1.2. Klein’s theorem. — In the remaining two cases of Lemma 1.4, the differential
Galois groups are finite. This implies that the differential Galois group equals the
ordinary Galois group. An important tool in studying these cases is Klein’s Theorem.
We present a version of it suggested by F. Beukers. For a different approach we refer
to [BD79].
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
4
It will be convenient to use differential operators. These are elements of the skew
polynomial ring k̄(x)[∂x ]. The multiplication is defined by ∂x x = x∂x + 1. We will
identify the linear differential equation Σi ai y (i) = 0 with the differential operator
Σi ai ∂xi .
We recall from [HvdP95] the following easy lemma.
Lemma 1.6. — The k̄-algebra homomorphisms φ : k̄(t)[∂t ] → k̄(x)[∂x ] are given by
d
φ(t) = a and φ(∂t ) = a10 ∂x + b with a ∈ k̄(x) \ k̄; a0 := dx
a and b ∈ k̄(x).
Notation 1.7
– For F ∈ k̄(x)\k̄ we define the k̄-homomorphism φF : k̄(t) → k̄(x), by φF (t) = F .
– Let φ be an injective homomorphism φ : k̄(t) → k̄(x). Then we also write φ for
the extension of φ to the homomorphism of differential operators φ : k̄(t)[∂t ] →
1
k̄(x)[∂x ], defined by φ(∂t ) = φ(t)
0 ∂x .
– For F ∈ k(x) \ k, b ∈ k̄(x), we define φF,b : k̄(t)[∂t ] → k̄(x)[∂x ] by φF,b (t) = F ,
φF,b (∂t ) = F10 (∂x + b).
– We will call an automorphism of k(t)[∂t ], given by t 7→ t, ∂t 7→ ∂t + b a shift.
– For a differential operator L we define Aut(L) to be the group
{ψ ∈ Autk̄ k̄(t) | Norm(ψ(L)) = L}.
First we will discuss the process of normalization. A second order differential
operator L := a2 ∂ 2 + a1 ∂ + a0 is said to be in normal form if a2 = 1 and a1 = 0.
We can put L into normal form, Norm(L), by dividing L by a2 , and then applying
a1
. Note that normalization transforms the old solution space V
the shift ∂ 7→ ∂ − 2a
2
a1
0
to f · V , with f = 2a2 f . The operator remains defined over k(x), but the associated
Picard-Vessiot extension K changes if f ∈
/ K.
Klein’s theorem is concerned with differential operators L := ∂x2 − r with finite
non-cyclic differential Galois group G ⊂ SL2 (k̄). If we again use the notation H SL2
for the inverse image in SL2 of a group H ⊂ PSL2 , the possibilities for such G are (up
SL2
SL2
2
to conjugation): {DnSL2 , ASL
4 , S4 , A5 }. In [BD79] we find for each such group G
a standard operator, denoted StG , which is in normal form, and has differential Galois
group G. These are:
3 1
16 t2
3 1
= ∂t2 +
16 t2
3 1
= ∂t2 +
16 t2
3 1
= ∂t2 +
16 t2
StDSL2 = ∂t2 +
n
StASL2
4
StS SL2
4
StASL2
5
SÉMINAIRES & CONGRÈS 13
1
1
3
n2 + 2
−
,
2
16 (t − 1)
8n2 t(t − 1)
1
1
2
3
+
−
,
2
9 (t − 1)
16 t(t − 1)
1
1
2
101
+
−
,
9 (t − 1)2
576 t(t − 1)
1
1
2
611
+
−
.
2
9 (t − 1)
3600 t(t − 1)
+
PULLBACKS OF DIFFERENTIAL EQUATIONS
5
The so-called local exponents of these standard equations are given by the following
table.
0
1
∞
n−1
StDSL2 14 , 43 14 , 34 − n+1
2n , − 2n
n
StASL2 14 , 43 13 , 23
− 31 , − 23
4
StS SL2
4
StASL2
5
1
4,
1
4,
3
4
3
4
1
3,
1
3,
2
3
2
3
− 83 , − 58
− 52 , − 35
In the proof of Klein’s Theorem we will need the following lemma.
Lemma 1.8. — Let L be a monic second order differential operator over k(x), with
finite differential Galois group G, and Picard-Vessiot extension K. Let {y1 , y2 } be a
basis of solutions of L, and write s := yy12 .
(1) Normalizing L does not change the field K p := k(x)(s) ⊂ K.
(2) Let L1 ∈ k(x)[∂x ] be a monic differential operator, which also has a basis of
solutions in K of the form {sy, y}. Then L1 can be obtained from L by the shift
∂x 7→ ∂x − ( yy1 )0 /( yy1 ).
If moreover G is non-cyclic and G ⊂ SL2 (k), then also the following statements hold.
(3) K p = K ±I
√, the fixed field of −I in K.
p
(4) K = K ( s0 ).
(5) k(s) is G-invariant and ∃ t ∈ k(x) such that k(s)G = k(t).
Proof
(1) This follows immediately from the fact that the normalization of L has a basis
0
of solutions {f y1 , f y2 } (for some f with ff ∈ k(x)).
(2) The monic differential operator φx,−( yy )0 /( yy ) clearly has {sy, y} as a basis of
1
1
solutions, and therefore is equal to L1 .
(3) Since k̄(x) ⊂ k(x)(y1 , y2 ) is a finite extension, we have y10 , y20 ∈ k(x)(y1 , y2 ),
so K = k(x)(y1 , y2 ). Because K p is algebraic over k̄(x) the derivation on K induces
a derivation on K p . So ( yy12 )0 = yd2 ∈ k̄(x)( yy12 ), where d = y10 y2 − y20 y1 . It is easily
2
∗
seen that d0 = 0, and d 6= 0, so d ∈ k . We find that y22 ∈ K p and for a similar
reason also y12 ∈ K p . So the only elements in G that fix k̄(x)( yy12 ) are ±I. By Galois
correspondence K p is the fixed field of {±I}.
√
(4) We have K = K p (y2 ), and y22 = sd0 , so K = K p ( s0 ).
(5) From the G-action on khy1 , y2 i one immediately finds that k(s) is G-invariant.
Since k̄(s) is a purely transcendental extension of k̄ we get by Lüroth’s theorem that
the fixed field of G is also purely transcendental. So we can write k(s)G = k(t), and
because t ∈ K is invariant under G, we get t ∈ k(x).
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
6
Theorem 1.9 (Klein). — Let L be a second order differential operator over k(x) in
SL2
SL2
2
normal form, with differential Galois group G ∈ {DnSL2 , ASL
4 , S4 , A5 }. There
exists an element F ∈ k̄(x) such that Norm(φF (StG )) = L. Moreover φF : k̄(t) →
k̄(x) is unique up to composition with an automorphism ψ ∈ Aut(StG ).
Proof. — We will use the notation of the above lemma. Write Gp := G/{±I} for
Gal(K p /k(x)) = Gal(k(s)/k(t)). The field extension k̄(t) ⊂ k̄(s) corresponds to
a covering of P1t by P1s , with Galois group Gp . It is known that for the groups
Gp ⊂ PGL(2) considered here, the map P1s → P1t is ramified above three points. If
necessary replacing t by the image of t under a Möbius-transformation, these three
points are 0, 1, ∞. The list of ramification indices is (up to permutations of 0, 1, ∞):
Gp
Dn
A4
S4
A5
e0
2
2
2
2
e1
2
3
3
3
e∞
n
3
4
5
We choose t such that we get precisely the above ramification indices for 0, 1, ∞.
We now want to construct a differential operator in k(t)[∂t ], with differential Galois
group G, and with Picard-Vessiot extension some√field K1 , such that K1p = k(s).
As suggested by F. Beukers one takes K1 := k̄(s, s0 ), where 0 denotes the unique
d
on k(t). We write V for the solution space of L in K,
extension of the derivation dt
s
and we define V1 := k √s0 , √1s0 ⊂ K1 .
Lemma 1.10
(1) The field K1 does not depend on the choice of t.
(2) K1 is a Galois extension of k(t), and we can identify Gal(K1 /k(t)) with G. The
vector space V1 is G-invariant, and isomorphic to V as a G-module.
(3) V1 does not depend on the choice of s.
Proof
(1) For t1 =
ds dt1
ds
1
ad − bc = 1, we have ds
dt = dt1 dt = dt1 (ct+d)2 , so
r
r ds r ds 1
ds = k s,
k s,
= k s,
dt
ct + d dt1
dt1
at+b
ct+d ,
(2) We will show that K1 is the splitting field over k̄(t) of P1 P2 , where P
√1 is the
minimal polynomial of s over k(t), and P2 is the minimal polynomial of s0 over
k(t). By construction the extension k̄(t) ⊂ k̄(s) is Galois, so all zeroes of P1 lie in
k̄(s). The only thing that remains to be shown is that all roots of P2 lie in K1 . This
Q
s0
minimal polynomial is a factor of σ∈Gp (T 2 − σ(s0 )), and σ(s0 ) = σ(s)0 = (cs+d)
2,
√
√
± s0
a
b
0
for σ = c d . So all zeroes of the minimal polynomial of s are of the form cs+d ,
and therefore lie in K1 .
SÉMINAIRES & CONGRÈS 13
PULLBACKS OF DIFFERENTIAL EQUATIONS
7
We can define an isomorphism V → V1 , by y1 7→ √ss0 , y2 7→ √1s0 . This induces a
G-action on V1 . A direct computation shows that this action extends to a G-action
on K1 , extending the existing G-action on k̄(s). The invariant field in K1 under this
action is k(t), as can be seen from the inclusions
Gp
k(t) ⊂ k̄(s) ⊂ K1 .
We also conclude from this that G = Gal(K1 /k(t)).
0
0 ad−bc
(3) We have ( as+b
cs+d ) = s (cs+d)2 , and it immediately follows that V1 does not
as+b
change if we replace s by cs+d
, ad − bc = 1. Note that changing t in general does
change V1 .
We continue the proof of Klein’s Theorem. Since the 2-dimensional vector space
V1 is invariant under the Galois group of K1 over k(t), it is the solution space of some
monic second order differential operator MG over k̄(t). Clearly K1 is the correspond
ing Picard-Vessiot extension. Further s = √ss0 / √1s0 , so k̄(s) is the corresponding
subfield.
Claim: MG = StG .
We note that a monic second order differential operator with three fixed singular
points is completely determined by its local exponents (see [vdPU00, Chapter 5]).
The singular points of the differential operator MG are {0, 1, ∞}. So to prove the
claim, it suffices to show that the local exponents of MG and StG coincide for every
singular point. We can calculate the local exponents of MG . We give the calculation
for t = 0. After applying a Möbius-transformation to s (which is allowed), we can
suppose that s is a local parameter of a point above 0 ∈ P1t . So we get an embedding
of complete local rings k̄[[t]] ⊂ k̄[[s]], and we have t = se0 + ∗se0 +1 + · · · , where
again e0 is the ramification index of the embedding k̄(t) ⊂ k̄(s) at t = 0. We find
1
s = t e0 + · · · , so the power series expansion of the basis of solutions of MG looks like
1
1
− 1
+ 1
√1 = t 2 2e0 + · · · , and √s = t 2 2e0 + · · · . Therefore the local exponents at t = 0
s0
s0
are 12 ± 2e10 . In the same way we find the local exponents at t = 1, ∞ to be 21 ± 2e11
and − 21 ± 2e1∞ respectively. These are precisely the local exponents of the standard
operator, which proves our claim.
Since t ∈ k(x), we can write t = F ∈ k(x). We have that φF (StG ) is a differential
operator with corresponding intermediate field k̄(x)(s). By Lemma 1.8 the differential
operator Norm(φF (StG )) also has k̄(x)(s) as corresponding intermediate field, and L
can be obtained from Norm(φF (StG )) by a shift. Since both operators are in normal
form, we must have L = Norm(φF (StG )). This proves the existence of F .
We now consider the unicity of F . First of all, note that the choice of ramification
indices over {0, 1, ∞} of the covering P1s → P1t still leaves us some choice for t. To be
precise,
– if Gp = D2 we can replace t by its image under an automorphism of the P1t
which permutes {0, 1, ∞}.
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
8
– if Gp = Dn , n 6= 2 we can replace t by 1 − t.
t
– if Gp = A4 we can replace t by t−1
.
Lemma 1.11. — Let ψ ∈ Autk̄ k̄(t) be an automorphism of P1t respecting the ramification data of the covering P1s → P1t . Then ψ ∈ Aut(StG ).
az+b
Proof. — Suppose we can replace t by z, t = cz+d
, ad − bc = 1, without changing
the ramification indices at {0, 1, ∞} of the covering induced by the field extension
fG
k(t) ⊂ k(s). The resulting vector space Ve1 can be written as Ve1 = (cz + d)V1 . Let M
be the monic differential operator in k(z)[∂z ], with solution space Ve1 . We find that
1
fG =
(MG ). Indeed φ az+b (MG ) is a differential operator over k(z)
M
c
(cz+d)4 φ az+b
cz+d , cz+d
cz+d
with solution space V1 , and multiplying all solutions by cz + d corresponds to the shift
c
fG is constructed in the same way as MG , we have that
. Because M
∂z 7→ ∂z − cz+d
1
fG ) = StG , φt : k̄(z)[∂z ] → k(t)[∂t ]. We find that
φt (M
(StG ) = StG ,
c
4 φ at+b
(ct+d)
so
at+b
ct+d
ct+d , ct+d
∈ Aut(StG ).
We will now show that φF is unique up to composition with an element in Aut(StG ).
Our constructions give rise to the following diagram,
k̄(x)
∪
k̄(t)
⊂
⊂
k̄(x)(s)
∪
k̄(s)
⊂
⊂
k̄(x)(y1 , y2 )
√
k̄(s, s0 )
Now suppose we can write L = Norm(φP (StG )) for some P ∈ k̄(x). Then we can
make a diagram as above, where the image of t in k(x) is now P . As we proved above,
t is almost unique up to composition with some ψ ∈ Aut(StG ). Therefore we must
have φP = φF ◦ ψ, for some ψ ∈ Aut(StG ).
Remark 1.12. — In this remark we want to explain the following phenomenon. Let
2
C(x) ⊂ KG be a Picard-Vessiot extension for StG , G ∈ {S4SL2 , ASL
5 }. For each G, we
find two normalized differential operators in [vdPU00] with Picard-Vessiot extension
equal to KG (and satisfying certain nice properties). They correspond to the two
irreducible two-dimensional representations of G. One of these two operators is StG .
Write LG for the other operator. By Klein’s theorem, we have that LG is a pullback
of StG . On the other hand we will show that StG is not a pullback of LG , so LG
cannot be used as “standard operator” in Klein’s theorem.
We will now explain this phenomenon in detail. First we consider the case G =
S4SL2 . The two operators of interest are
2
101
1
1
3 1
+
−
,
2
2
16 x
9 (x − 1)
576 x(x − 1)
3 1
2
173
1
1
= ∂x2 +
+
−
.
16 x2
9 (x − 1)2
576 x(x − 1)
StS SL2 = ∂x2 +
4
LS SL2
4
SÉMINAIRES & CONGRÈS 13
PULLBACKS OF DIFFERENTIAL EQUATIONS
9
The local exponents of StS SL2 and LS SL2 are given by the following table.
4
4
0
StS SL2
4
LS SL2
4
1
4,
1
4,
1
3
4
3
4
1
3,
1
3,
2
3
2
3
∞
− 83 , − 58
− 81 , − 78
Using the pullback formula of Theorem 2.7 we find that
LS SL2 = φF,b (StS SL2 ), F =
4
4
(x − 1)(144x2 − 232x + 81)3
F 00
+
1,
b
=
.
(28x − 27)4
2F 0
As we will see in Lemma 1.18, the difference of the local exponents of LS SL2 in a
4
point a is equal to the ramification index of F at a times the difference of the local
exponents of StS SL2 in F (a). This is in accordance with the fact that the difference
4
of the local exponents of LS SL2 at ∞ is
4
3
4.
Indeed, F has ramification index 3 at
∞, and the difference of the local exponents of StS SL2 at ∞ is 41 (and F (∞) = ∞).
4
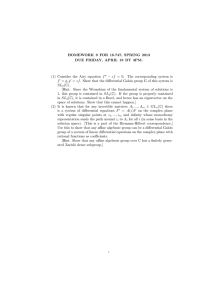
It also follows that StS SL2 cannot be written as a pullback of LS SL2 . The complete
4
4
ramification data of F are given by the following figure.
Z
u
Z
Z
Z
u
Z
Z
Z
u
Z
Z
@u
@
@
@
X
u
X
X
@
@
@u
@
@
u 0
u 1
x
x
0
1
P1x
@u ∞
@
@
∨
P1t
x
∞
We note that the local exponents of φF (StS SL2 ) at the ramified points (6= ∞) above
4
00
F
0, ∞ lie in 21 Z (see the proof of Lemma 1.18), but after applying the shift over 2F
0,
the local exponents become {0, 1} at these points.
We will now explain how the representation of S4SL2 on the solution space changes by
applying the pullback φF,b . As in the proof
theorem (using the variables x, u
√ of Klein’s
d
for the Picard-Vessiot extension
instead of t, s), we can write K = C(u, u0 ), 0 = dx
u
√
of StS SL2 . The solution space of StS SL2 is V :=
, √1u0 , and K p := K ±I = C(u).
u0
4
4
We can assume that the ramification data of C(x) ⊂ C(u) is as in the proof of Klein’s
1
theorem. Let W := hw1 , w2 i be the solution space of LS SL2 , and define s := w
w2 .
4
Then the group S4 acts on C(s), and we define C(t) := C(s)S4 , with the appropriate
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
10
ramification data. These constructions give rise to the following diagram.
√
C(x) ⊂ C(x)(s) = C(u) ⊂ C(u, u0 )
∪
∪
C(t) ⊂
C(s)
We have t = F ∈ C(x), and s is some rational expression of degree 7 in u, say s = g(u).
We will now calculate g.
The extension C(x) ⊂ C(u) has degree 24, and using [BD79], we find that we can
write x = h(u), where
(u8 + 14u4 + 1)3
h=−
+ 1.
108u4 (u4 − 1)4
We can also take t = h(s), so t = F (x) = F (h(u)) and t = h(s) = h(g(u)). Therefore
g satisfies h(g(u)) = F (h(u)). Using the ramification data of F and h, we can calculate the ramification data for g. Using these ramification data, together with some
heuristics, we find
u3 (u4 + 7)
.
g=−
7u4 + 1
√
w 0 w −w w 0
ds
= 1 2w2 1 2 , and
We can now express W in terms of u and u0 . We have dx
2
since the operator LS SL2 is in normal form w10 w2 − w1 w20 ∈ C. So we find that
4
dg(u)
u(u4 −1) 2
ds
d
. Clearly dx
= dg(u)
· du
. So we
W = h √ss0 , √1s0 i, 0 = dx
dx , and du = −21 7u4 +1
√ du
0
find a basis for W in terms of u and u , namely
n u2 (u4 + 7)
7u4 + 1 o
√ ,
√
.
(u4 − 1) u0 u(u4 − 1) u0
We will now examine the group S4SL2 in detail, and we will see how we can distinguish between the two irreducible representations ρ1 , ρ2 of S4SL2 in GL2 (C). The
abstract group S4SL2 is generated by two elements α, β, with image (1234),
(12)
in S4
respectively. For ρ1 we take the representation S4SL2 → GL2 (C), α 7→
√1
2
1 1
1 −1
2πi
8
0
−1
0 ζ8
ζ8
, β 7→
(see [Kov86, p. 30]). Then for ρ2 we can take the representation
(
), ζ8 = e
obtained by composition of ρ1 with the automorphism of Q(ζ8 ) given by ζ8 7→ ζ83 . We
remark that the induced representations of S4 in PGL(2, C) are conjugate. We can
distinguish ρ1 from ρ2 by the eigenvalues of ρi (α). For ρ1 these are {ζ8 , ζ8−1 } and for
ρ2 they are {ζ83 , ζ8−3 }.
We fix an identification of Gal(K/C(x)) with S4SL2 . We remark that since the
group Out(S4SL2 ) has two elements, there are essentially two ways to do this. We
may assume that S4SL2 acts on V via the representation ρ1 . So α √uu0 = ζ8 √uu0 and
α √1u0 = ζ8−1 √1u0 . We will now calculate the action of α on W . We have α(u) = ζ82 u,
4
4
u2 (u4 +7) u2 (u4 +7)
+1
+1√
√
√
√
so α (u
and α u(u7u
. It immediately
= ζ83 (u
= ζ8−3 u(u7u
4 −1) u0
4 −1) u0
4 −1) u0
4 −1) u0
SÉMINAIRES & CONGRÈS 13
PULLBACKS OF DIFFERENTIAL EQUATIONS
11
follows that the representation of S4SL2 in W is conjugate to ρ2 , which is what we
wanted to show.
2
Now consider the case G = ASL
5 . We will use the same terminology as in the
SL2
S4 -case. The equations of interest are
StASL2 := ∂x2 +
5
LASL2 := ∂x2 +
5
1
1
3 1
2
611
+
−
,
16 x2
9 (x − 1)2
3600 x(x − 1)
3 1
2
899
1
1
+
−
.
2
2
16 x
9 (x − 1)
3600 x(x − 1)
We have that LASL2 is a pullback of StASL2 , with pullback function
5
F =
5
(1 − x)(147456x4 − 403456x3 + 379296x2 − 57591x − 59049)3
+ 1.
(1664x2 − 2457x + 729)5
The ramification of F is given by the following diagram.
H
u
H
H
H
u
H
H
H
u
H
H
H
u
H
H
H
u
H
H
H
u
H
H
Z
u
Z
Z
Z
u
Z
Z
@
H
u
H
H
@
@
Z
u
Z
Z
@
HH
u
H
@
@
Z
u
Z
Z
u 0
u 1
x
x
0
1
P1x
@u ∞
@
@
x
∨
P1t
∞
As in the S4SL2 case we have the following diagram.
√
C(x) ⊂ C(u) ⊂ C(u, u0 )
∪
∪
C(t) ⊂ C(s)
Again write x = h(u) and s = g(u). In the same way as in the S4SL2 -case, we find
h=
(u20 − 228u15 + 494u10 + 228u5 + 1)3
+ 1,
1728u5(u10 + 11u5 − 1)5
g=−
u3 (u10 − 39u5 − 26)
.
26u10 − 39u5 − 1
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
12
−78
,
√s , √1
s0
s0
10
5
u(u +11u −1) 2
,
we
26u10 −39u5 −1
We have W =
0
=
d
dx ,
and
ds
dx
=
dg(u)
du
·
du
dx .
Using the fact that
dg(u)
du
=
obtain the following basis for W
n u2 (u10 − 39u5 − 26)
26u10 − 39u5 − 1 o
√ ,
√
.
(u10 + 11u5 − 1) u0 u(u10 + 11u5 − 1) u0
2
The group ASL
has two irreducible representations ρ1 , ρ2 in GL2 (C). We have
5
SL2
that A5 is generated by two elements α, β, with image (12345) and (12)(34) in
SL2
A5 respectively.
We fix ρ1 to be the representation of A5 in GL2 (C) given by
α 7→
ζ10
0
ζ
0
−1
10
1 3
5 (ζ10
b
, β 7→ ( ab −a
), ζ10 = e
2πi
10
, a =
1
3
5 (3ζ10
2
− ζ10
+ 4ζ10 − 2), b =
2
+ 3ζ10
− 2ζ10 + 1). This explicit formulas come from [Kov86, p. 30], note
q
√
√
1
5, b = 5−1
that we can also write a = i 12 + 10
2 a. Then ρ2 is the representation
3
obtained by composition of ρ1 with the automorphism of Q(ζ10 ) given by ζ10 7→ ζ10
.
SL2
In contrast to the S4 -case, the induced representations of A5 in PGL(2, C) are not
isomorphic. As in the S4SL2 -case, we can distinguish ρ1 from ρ2 by the eigenvalues of
−1
−3
3
ρi (α). For ρ1 these are {ζ10 , ζ10
} and for ρ2 they are {ζ10
, ζ10
}.
2
Fix an identification of Gal(K/C(x)) with ASL
5 . Again there are essentially two
2
ways to do this. We may assume that ASL
acts on V via the representation ρ1 .
5
−1
1
u
1
u
So α √u0 = ζ10 √u0 and α √u0 = ζ10 √u0 . Again we calculate the action of
2
10
5
u2 (u10 −39u5 −26) 3 u (u −39u −26)
2
√
√
= ζ10
and
α on W . We have α(u) = ζ10
u, so α (u
10 +11u5 −1) u0
(u10 +11u5 −1) u0
10
5
10
5
−3
26u −39u −1
26u
−39u
−1
α u(u10 +11u5 −1)√u0 = ζ10 u(u10 +11u5 −1)√u0 . It follows that the representation of
2
ASL
in W is conjugate to ρ2 .
5
Only for some specific F ∈ k̄(x) the differential operator Norm(φF (StG )) lies in
k(x)[∂x ]. The next corollary makes this precise.
Corollary 1.13
(1) Norm(φF (StG )) is defined over k ⇐⇒ ∀ σ ∈ Gal(k̄/k) ∃ S(σ) ∈ k̄(t) such that
φS(σ) ∈ Aut(StG ) and φσ(F ) = φF ◦ φS(σ) .
(2) Furthermore, φF satisfies the equivalent properties of (1) if and only if φF =
φf ◦ φh , with f ∈ k(x), and φh an automorphism of k̄(t) satisfying the equivalent
properties of (1).
Proof
(1) ’⇐=’ ∀ σ ∈ Gal(k̄/k) we have σ(Norm(φF (StG ))) = Norm(σ(φF (StG ))) =
Norm(φσ(F ) (StG )) = Norm(φF ◦ φS(σ) (StG )) = Norm(φF (StG )), so the operator is
Gal(k̄/k) invariant, hence has coefficients in k(x). ’=⇒’ Because Norm(φF (StG )) is
Gal(k̄/k) invariant we get Norm(φF (StG )) = σ(Norm(φF (StG ))) = Norm(φσ(F ) (StG ))
∀ σ ∈ Gal(k̄/k). Hence Klein’s theorem gives φσ(F ) = φF ◦ φS(σ) , with φS(σ) ∈
Aut(StG ). This proves (1).
SÉMINAIRES & CONGRÈS 13
PULLBACKS OF DIFFERENTIAL EQUATIONS
13
(2) The if-part follows immediately from φσ(F ) = φσ(f ) ◦ φσ(h) = φf ◦ φσ(h) . For the
other implication write φσ(F ) = φF ◦ φS(σ) , with φS(σ) ∈ Aut(StG ) an automorphism
of k̄(t) that permutes 0, 1, ∞. Then there is also an automorphism φh of k̄(t), with
∞ t−a0
φσ(h) = φh ◦ φS(σ) ∀ σ ∈ Gal(k̄/k). Namely, take h = aa11−a
−a0 t−a∞ , where a0 , a1 , a∞ ∈
k̄ are elements which are permuted in the same way by every σ ∈ Gal(k̄/k) as 0, 1, ∞
by φS(σ) . These elements are proven to exist in the lemma below. Note that for such
a0 , a1 , a∞ the extension k(a0 , a1 , a∞ )/k has degree at most 6. Define f ∈ k̄(x) by
φf := φF ◦ φ−1
h . Then φF = φf ◦ φh , and we only need to show that f is Gal(k̄/k)
−1
invariant. But we have that φσ(f ) = φσ(F ) ◦ φ−1
= φf
σ(h) = φF ◦ φS(σ) ◦ (φh ◦ φS(σ) )
and therefore f ∈ k(x).
Remark 1.14. — The above corollary states that every differential operator ∂x2 − r,
with r ∈ k(x) is the pullback of a differential operator over k(x) with three singularities, and with the same local exponents as the corresponding standard operator
(use Norm(φh (StG ))). So we can see this corollary as a “rational version” of Klein’s
theorem.
In the proof above we used the following lemma. Its content is well known, and we
prove it only for the sake of completeness.
Lemma 1.15. — Given an action of G := Gal(k̄/k) on the set {1, 2, 3}, there exists a
Galois extension k ⊂ k(a1 , a2 , a3 ) ⊂ k, such that G permutes the set {a1 , a2 , a3 } in
the corresponding manner.
Proof. — We first assume G acts as S3 . Let H be the subgroup of G which fixes
{1, 2, 3}. Then F := k̄ H is a Galois extension of k of degree 6. We have an action of
G/H ∼
= S3 on F . For some element σ of order two in S3 , write k(a1 ) = F σ . Then
k ⊂ k(a1 ) is an extension of degree 3, which is not a Galois extension. Writing a2 , a3
for the conjugates of a1 in F , we have F = k(a1 , a2 , a3 ). Furthermore G acts as S3
on the set {a1 , a2 , a3 }. We can rename the ai , in such a way that G permutes the set
{a1 , a2 , a3 } in the desired manner. The remaining cases, where G acts as 1, C2 or C3
are easy.
Notation 1.16
– Let L ∈ k(x)[∂x ] be an arbitrary second order differential operator, with differential Galois group G ⊂ GL2 (k). We write Gp for the image of G in PGL(2),
and call Gp the projective differential Galois group of L. This definition of Gp
is consistent with the definition of Gp in the proof of Klein’s theorem.
– For L as above, and a ∈ P1 (k), we have a set of local exponents {l1 , l2 } at a.
We will call |l1 − l2 | the local exponent difference at a.
Again let L ∈ k(x)[∂x ] be a second order differential operator, with projective
differential Galois group Gp ∈ {Dn , A4 , S4 , A5 }. We have that Norm(L) has the
same projective differential Galois group. Indeed L and Norm(L) define the same
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
14
M. BERKENBOSCH
field extension k(x) ⊂ k(x)(s) (notation from the proof of Klein’s theorem), and
we can identify Gp with Gal(k(x)(s)/k(x)), where σ = ac db ∈ Gp acts on s by
as+b
σ(s) = cs+d
. Consequently, the differential Galois group of Norm(L) is an element
SL2
SL2
SL2
2
of {Dn , ASL
4 , S4 , A5 }. Using Klein’s theorem we find that there exist elements
a, F, b ∈ k(x), such that L = a · φF,b (StG ).
1.3. Differential Galois group D2SL2 . — For generality, we formulate the following theorem for differential operators with projective differential Galois group D2 .
This of course includes differential operators in normal form with differential Galois
group D2SL2 .
Theorem 1.17. — Let L ∈ k(x)[∂x ] be a second order differential operator, with projective differential Galois group Gp = D2 . There exists a point a ∈ P1 (k̄) for which L
has local exponent difference in 21 + Z. For any such a there is an algebraic solution
of minimal degree of the corresponding Riccati equation, with minimal polynomial in
k(a)[x].
Proof. — We will first show that we can assume L to be in normal form. We can
write Norm(L) = a · φx,b (L), for some a, b ∈ k(x). If u is a solution of the Riccati
equation RNorm(L) , then u + b is the corresponding solution of RL . Writing fu for the
minimal polynomial of u over k(x), we clearly have fu ∈ k 0 (x)[T ] ⇐⇒ fu+b ∈ k 0 (x)[T ].
Furthermore normalization does not affect the local exponent difference at a point.
Klein’s theorem gives an F ∈ k̄(x) such that L = Norm(φF (StG )), where G :=
D2SL2 . We will use notations as in the proof of Klein’s theorem. We have that
s
s
√ , √1
√
√1
is
a
basis
of
solutions
of
St
.
Then
,
is a basis of solutions
G
0
0
0
0
0
0
s
s
F s
F s
d
of L, where 0 now denotes dx
. We find that the solutions of RL are precisely the
00
1F
0
elements F u − 2 F 0 , with u a solution of RStG . From the explicit description of D2SL2
in Lemma 1.4, we know that there are six solutions of RStG of degree two over k(t),
which correspond to three minimal polynomials {P1 , P2 , P3 }. By [HvdP95, 6.5.3] we
know that Pi ∈ k(t)[T ], i = 1, 2, 3. Let u be one of the six solutions of RStG of degree
00
2 over k(t). Write u
e := F 0 u − 21 FF 0 for the corresponding solution of RL . If Pj is
00 the minimal polynomial of u, then F (Pj ) := (F 0 )2 Pj FT0 + 12 (FF0 )2 ∈ k̄(x)[T ] is the
e be a minimal extension, such that F ∈ k(x).
e
minimal polynomial of u
e. Let k ⊂ k
Then
0
0
e
e
F (Pj ) ∈ k(x)[T ], so we can take k ⊂ k, where k is the field defined in the beginning
of this section. Because L ∈ k(x)[∂x ], we have that F satisfies the properties stated
in Corollary 1.13. Using notation as in the proof of this corollary, we see that we can
take e
k to be the extension of k generated by the coefficients of h, so e
k = k(a0 , a1 , a∞ ).
This is a field extension of k of degree at most 6.
Claim: for any j ∈ {0, 1, ∞} there is a solution of RL with minimal polynomial
in k(aj )[T ].
SÉMINAIRES & CONGRÈS 13
PULLBACKS OF DIFFERENTIAL EQUATIONS
15
The Galois group Gal(k/k) acts as a group of permutations on the set
{F (P1 ), F (P2 ), F (P3 )}. In fact σ(F (Pi )) = σ(F )(Pi ) for σ ∈ Gal(k/k). By
Corollary 1.13 we have φσ(F ) = φF ◦ φS(σ) with φS(σ) ∈ Aut(StG ). We know the
polynomials Pi explicitly, see Example 1.20. A calculation shows that all non-trivial
1
t
act non-trivially on the Pi . Using
, t−1
, t−1
automorphisms φS , S ∈ 1t , 1 − t, 1−t
t
this we see that there exists a Gal(k/k)-equivariant bijection between {a0 , a1 , a∞ }
and {F (P1 ), F (P2 ), F (P3 )}. This immediately proves the claim.
Let f be as in Corollary 1.13 (2). If f (a) = ai , then k(ai ) ⊂ k(a). So the only
thing left to prove is that there exist points a with local exponent difference in 21 + Z,
and that any such point satisfies f (a) ∈ {a0 , a1 , a∞ }. For this we need the following
lemma.
Lemma 1.18. — With the above notation the following holds.
The extension k̄(t) ⊂ k̄(x) corresponds to a covering P1x → P1t . Suppose that this
covering is ramified with index e in a point a ∈ P1x (k̄) lying above some b ∈ P1t (k̄).
The local exponent difference of L = Norm(φF (StG )) at a is |e(l1 − l2 )|, where {l1 , l2 }
are the local exponents of StG at b.
Proof. — By a calculation as in the proof of Klein’s theorem, we find that the local
exponents of φF (StG ) at a are {el1 , el2 }. The lemma now follows from the fact that
normalization does not change the local exponent difference at a point.
We continue the proof of Theorem 1.17. Using the above lemma, we see that if a
point a ∈ P1x (k̄) does not lie above one of the points 0, 1, ∞, then the local exponent
difference of L at a lies in Z. If a does lie above b ∈ {0, 1, ∞}, then the local exponents
of StG at b are {l1 , l2 } = ± 41 , 43 , so the local exponent difference of L at a is in
1
2 + Z if e is odd, and in Z if e is even.
The only thing left to prove is that there exist points a ∈ P1x (k̄), such that L has
local exponent difference in 12 + Z at a. By [vdPS03, Theorem 5.8], the differential
Galois group of L is equal to the monodromy group, so there is a local monodromy
matrix which has order 2 in PGL2 (k). It follows that the local exponents at the
corresponding singular point have local exponent difference in 21 + Z.
2
1.4. Differential Galois group ASL
4
Theorem 1.19. — Let L ∈ k(x)[∂x ] be a second order differential operator, with projective differential Galois group Gp = A4 . There exists a point a ∈ P1 (k̄) for which L
has local exponent difference in 13 Z\Z. For any such a there is an algebraic solution
of minimal degree of the corresponding Riccati equation, with minimal polynomial in
k(a)[x].
Proof. — This case can be treated similarly to the D2 -case above, now taking G :=
2
ASL
4 . Again we will use notation of Corollary 1.13. We will only give the differences
with the proof of Theorem 1.17.
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
16
The Riccati equation RStG has eight solutions of degree 4 over k(t), corresponding
to two minimal polynomials P1 , P2 , ∈ k(t)[T ] (see Example 1.21, [HvdP95, 6.5.4],
t }.
or [Kov86, 5.2]). The group Aut(StG ) consists of two elements, namely {φt , φ t−1
Therefore an automorphism of StG can only permute the singular points {1, ∞}.
This implies a0 ∈ k, k(a1 ) = k(a∞ ) = e
k, and [e
k : k] ≤ 2. So F (Pi ) := (F 0 )4 Pi FT0 +
00 1 F
2 (F 0 )2 ∈ k(a1 )[T ] = k(a∞ )[T ]. The only thing left to prove is that all points a with
local exponent difference in 13 Z\Z satisfy f (a) ∈ {a1 , a∞ }, and that there exists such
a point.
The local exponents of StG at the point 0 are 41 , 34 . At the point 1 the local
exponents are 31 , 23 , and at the point ∞ they are − 31 , − 32 . Now Lemma 1.18 gives
the following. The points with local exponent difference in 13 Z\Z are precisely the
points a ∈ P1x (k̄) lying above 1, ∞ with ramification index not divisible by 3. To prove
that indeed there are such points a, we again use that the differential Galois group is
equal to the monodromy group. We may assume that L is of the form L = φF (StG ).
It follows that if the local exponent difference at a point lies in Z, then the local
exponents lie in 21 Z. If all local exponents lie in 12 Z, then the monodromy group is
2
generated by elements of order ≤ 2. This contradicts the assumption that G = ASL
4 ,
SL2
because A4 is not generated by elements of order 2.
1.5. Examples. — In the following examples we will give explicitly the minimal
2
polynomials of solutions of RStG of minimal degree over Q(t), for G ∈ {D2SL2 , ASL
4 }.
We will also calculate these minimal polynomials corresponding to pullbacks of standard equations.
Example 1.20. — In the proof of Theorem 1.17 we showed that the Riccati equation
RStG , G := D2SL2 has six algebraic solutions of degree two over Q(t). Let {y1 , y2 }
be a basis of solutions of StDSL2 , on which the differential Galois group G has the
2
explicit form of Lemma 1.4. Then these six solutions of the Riccati equation are
y0
y , y ∈ {y1 , y2 , y1 + y2 , y1 − y2 , y1 + iy2 , y1 − iy2 }, which are the solutions of the three
polynomials
1 9t2 − 7t + 1
1 T+
,
2t
t−1
16 t2 (t − 1)2
1 1 1 1 1 3t2 − 3t + 1
T+
P2 := T 2 −
+
,
2t
2t−1
16 t2 (t − 1)2
1 1 1 1 9t2 − 11t + 3
+
.
T+
P3 := T 2 −
t
2t−1
16 t2 (t − 1)2
√ √
Now consider the function F := x−2x√2 , mapping 0, − 2, 2 to 0, 1, ∞ respectively.
We have that φF satisfies the properties of Corollary 1.13 (1), so L := Norm(φF (StG ))
P1 := T 2 −
SÉMINAIRES & CONGRÈS 13
1 1
+
PULLBACKS OF DIFFERENTIAL EQUATIONS
17
is defined over Q. A calculation gives
3 3x2 + 2
.
8 x2 (x2 − 1)2
Using the formula in the proof of Theorem 1.17, we find that the six solutions of RL
of degree two over Q(x) are the solutions of the polynomials
√
√
√
1 4x2 − 2x − 2
1 8x4 − 4 2x3 − 9x2 + 4 2x + 2
2
T −
T+
,
2 x(x2 − 2)
8
x2 (x2 − 1)2
√
√
√
1 8x4 + 4 2x3 − 9x2 − 4 2x + 2
1 4x2 + 2x − 2
2
T+
,
T −
2 x(x2 − 2)
8
x2 (x2 − 1)2
2(x2 − 1)
1 8x4 − 15x2 + 6
T2 −
T
+
.
x(x2 − 2)
8 x2 (x2 − 1)2
L = ∂x2 +
We remark that the local exponent difference is 21 for each singular point of L. This
is in accordance with Theorem 1.17. In [HvdP95] it is stated that √
[k 0 : k] ∈ {1, 3}
SL2
0
for G = D2 . This does not contradict the fact that we find k = Q( 2) for some of
the solutions of RL , because in [HvdP95] only fields k 0 of minimal degree over k are
considered.
2
Example 1.21. — We consider the standard equation StG , G := ASL
4 . In [Kov86,
5.2] one of the two minimal polynomials for solutions of RStG of degree 4 over Q(t)
is computed. It is the polynomial
P1 := T 4 −
7t − 3 3 48t2 − 41t + 9 2 320t3 − 409t2 + 180t − 27
T +
T −
T
3t(t − 1)
24t2 (t − 1)2
432t3 (t − 1)3
2048t4 − 3484t3 − 2313t2 − 702t + 81
+
.
20736t4(t − 1)4
The other minimal polynomial is P2 := S(P1 ), S =
the proof of Theorem 1.17. A calculation gives
t
t−1 ,
where we use notation of
8t − 3 3 64t2 − 49t + 9 2 512t3 − 598t2 + 225t − 27
T +
T −
T
3t(t − 1)
24t2 (t − 1)2
432t3 (t − 1)3
−530t4 + 2788t3 − 909t2 − 918t + 81
+
.
20736t4(t − 1)4
√ √
Let a ∈ Q, and define F := x−2x√a which maps 0, − a, a to 0, 1, ∞ respectively.
Then L := Norm(φF (StG )) is
3
8
3 1
1
a
−
+
.
∂x2 +
16 x2
16 x2 − a 9 (x2 − a)2
√ √
The local exponents at 0, − a, a are 41 , 34 , 31 , 23 , 31 , 23 respectively. So theorem 1.19 states that there is a solution of RL of degree 4 over Q(x), such that the
√
corresponding field k 0 lies in Q( a). A calculations shows that in fact for each solution
√
of RL of degree 4 over Q(x), the corresponding field k 0 equals Q( a).
P2 = T 4 −
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
18
1.6. Algorithm. — We will now give an algorithm to compute a field k 0 (as defined
in the beginning of this chapter). We will also give some examples.
Let L ∈ k(x)[∂x ] be a second order differential operator in normal form with known
2
differential Galois group G in {D2SL2 , ASL
4 }. We can use theorems 1.17 and 1.19 to
T
0
2
find a field k . Write L = ∂x − N , T, N ∈ k[x], where gcd(T, N ) = 1, and N is
monic. Because G is finite, all singularities of L are regular singular (see [vdPS03,
Definition 3.9]). Therefore, the zeros of N can at most have order two. So we can
write N = N1 · N22 , such that N1 , N2 have only zeros of order one, and are monic.
T
= NA2 + NB1 . Now the local exponents at some point
We can make a decomposition N
2
p ∈ k̄ are the solutions of the equation λ(λ−1) =
λ satisfy λ(λ − 1) =
A(p)
N20 (p)2 .
A·(x−p)2
|x=p .
N22
So the local exponents
For the D2 -case we search for points with local exponent difference in 12 +Z. Because
3−2n
L is in normal form, the local exponents of L at such a point are 2n+1
, for
4 , 4
some n ∈ Z. Therefore we get the system of equations:
(3 + 4n − 4n2 )N20 (p)2 + 16A(p) = 0
D2 -case :
N2 (p) = 0.
To solve this system we can calculate the resultant of (3 + 4n − 4n2 )N20 (x)2 + 16A(x)
and N2 (x) with respect to x. This gives a polynomial in n, for which it is easy to
determine if it has integer solutions. If this resultant is zero for some n0 , then we
can substitute n = n0 into the system of equations. Then solutions of the system are
given by gcd((3 + 4n0 − 4n20 )(N20 )2 + 16A, N2 ) = 0.
For the A4 -case we search for points with local exponent difference in 13 Z\Z. At
3−n
such a point the local exponents are 3+n
, for some n ∈ Z. We find the system
6 , 6
of equations:
(9 − n2 )N20 (p)2 + 36A(p) = 0
A4 -case :
N2 (p) = 0,
We search solutions, with n 6≡ 0 mod 3. This system can be solved in the same
way as in the D2 -case. We conclude that for a differential operator L satisfying our
assumptions, we can find a corresponding field k 0 .
Example 1.22. — We will demonstrate the algorithm for
L := ∂x2 +
16x18 − 288x15 + 2160x12 − 8947x9 + 20745x6 − 25056x3 + 13456
.
8(x9 − 9x6 + 27x3 − 29)2 x2
This is the operator obtained as the pullback of StDSL2 with F = h ◦ (x3 − 3), where
2
h is some automorphism of k̄(t) that sends the roots of x3 − 2 to {0, 1, ∞}. With
the notation of the algorithm we have T = 81 (16x18 − 288x15 + 2160x12 − 8947x9 +
20745x6 − 25056x3 + 13456), N = (x9 − 9x6 + 27x3 − 29)2 x2 .
SÉMINAIRES & CONGRÈS 13
PULLBACKS OF DIFFERENTIAL EQUATIONS
19
We calculate N2 by N2 = gcd(N, N 0 ) which obviously is (x9 − 9x6 + 27x3 − 29)x
and furthermore A = T . Using for example Maple we find that the resultant of
(3 + 4n − 4n2 )(N20 )2 + 16A and N2 over x is
(457668486144n3 −1373005458432n4+1373005458432n5 −457668486144n6)3
(29435 + 3364n − 3364n2).
This expression has as integer solutions n = 0 and n = 1, which both correspond to
the same set of local exponents. Substituting n = 0 we get gcd(3N20 + 16A, N2 ) =
1 1
x9 − 9x6 + 27x3 − 29, a polynomial in x3 , with as a solution a := (3 + 2 3 ) 3 . So there
is a field k 0 ⊂ Q(a). We know that [k 0 : k] ≤ 3, so k 0 = k or [k 0 : k] = 3. We can
calculate all subfields of Q(a) of degree 3 over Q in Maple 7, with the command
evala(Subfields(x^9-9x^6+27x^3-29,3));
√
It turns
out
that
the only such subfield is Q( 3 2). It follows that there is a field
√
k 0 ⊂ Q( 3 2).
√ √
Example 1.23. — Let h to be the automorphism of P1 sending 1, − 2, 2 to 0, 1, ∞
respectively. Let f = x2 − 3, and F = h ◦ f , then Norm(φF (StA4 )) is
27x12 − 540x10 + 4145x8 − 16366x6 + 37160x4 − 46872x2 + 21168
.
(6x(x − 2)(x + 2)(x4 − 6x2 + 7)2
As before we write this as ∂x2 − NA2 + NB1 . The resultant of (9−n2 )(N20 )2 +36A and N2
∂x2 −
2
is −258 326 76 (n−6)(n+6)(2n−3)2(2n+3)2 (n−1)4 (n+1)4 . The integer solutions for n
are n ∈ {−6, −1, 1, 6}. So only n = 1 (which gives the same as n = −1) is of interest,
for −6, 6 ≡ 0 mod 3. We now substitute n = 1 into (9 − n2 )(N20 )2 + 36A, and calculate
the greatest common divisor with N2 . This gives
the polynomial x4 − 6x2 + 7 =
p√
2
2 + 3, so there is a field k 0 of
(x − 3) − 2. A zero ofpthis polynomial is a =
√
2 + 3 . By a calculation in Maple 7 we find that the only
degree ≤ 2 over Q in Q
p√
√
field extension of Q of order 2 in Q
2 + 3 is Q( 2). Therefore there is a field
√
k 0 ⊂ Q( 2). Note that in this example we can explicitly calculate k 0 from knowing
only the operator and the differential Galois group.
2. Algorithms for finding the pullback function
The material in this section is joint work with Mark van Hoeij and Jacques-Arthur
Weil. A short preliminary version is published as [Wei].
Let L = ∂x2 + a1 ∂x + a0 ∈ k(x)[∂x ] be a monic order 2 differential operator.
We suppose the differential Galois group G over k̄(x) is known and is a finite subgroup of GL(2, k̄). We will write Gp for the image of G in the PGL2 (k̄). The normalization Norm(L) of L is obtained by a shift ∂x 7→ ∂x − a21 , and we write Gn
for the differential Galois group of Norm(L). We assume Gn is non-cyclic, which
SL2
SL2
SL2
2
implies Gn ∈ ASL
. By Klein’s theorem we have Norm(L) =
4 , S4 , A5 , Dn
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
20
Norm(φF (StGn )), for some F ∈ k(x). Therefore ∃ b ∈ k(x), such that for φ := φF,b
we have L = (φ(t)0 )2 φ(StGn ).
In this section we will concentrate on finding φ(t), which we will do case by case
with respect to Gp . We will define new standard equations StGp , with projective
Galois group Gp , for Gp ∈ {A4 , S4 , A5 , Dn }. For this standard equations Klein’s
theorem still holds, and we are able to give an explicit formula for φ(t).
Notation 2.1
1
– Let φ : k(t)[∂t ] → k(x)[∂x ], φ(∂t ) = φ(t)
0 (∂x + b) be a homomorphism. Then we
call φ(t) the pullback function corresponding to φ.
– Let L1 ∈ k(t)[∂t ], L2 ∈ k(x)[∂x ], be differential operators, such that we can write
L2 = aφF,b (L1 ), a, F, b ∈ k(x). If b = 0, we call L2 a pullback of L1 . If b 6= 0, we
call L2 a weak pullback of L1 .
2.1. Projective Galois group A4 . — We define the following new standard equation:
s
1
8t + 3
∂t +
, s=
.
StA4 := ∂t2 +
6t(t + 1)
t(t + 1)2
48
This differential operator is obtained from StASL2 by first making the shift ∂t 7→
4
1
1
t
∂t + 4t
+ 3(t−1)
, and then applying the coordinate transformation t 7→ t+1
. So
1
7
t
(StASL2 ). We will now motivate this new choice of a standard
StA4 = φ t+1
, 4t
− 12(t+1)
4
operator.š
From the fact that the projective differential Galois group of StASL2 is A4 , it follows,
4
using some representation theory, that this operator has solutions y1 , · · · , y4 such that
0
(y1 ···y4 )
y1 ···y4 ∈ k(t). This translates into the existence of a degree one right-hand factor of
Sym(StASL2 , 4). In fact there are precisely two such right-hand factors. By a direct
4
4
5
computation, we find that these right-hand factors are ∂t − 1t − 3(t−1)
and ∂t − 1t − 3(t−1)
.
We constructed StA4 such that Sym(StA4 , 4) has a right-hand factor ∂t . To see this,
note that for any differential operator L, we have Sym(φf,b (L), n) = φf,nb (Sym(L, n)).
1
1
So applying the shift ∂t 7→ ∂t + 4t
+ 3(t−1)
to StASL2 gives a differential operator
4
7t−3
1
2
f
f 4) has a right-hand
St = ∂t +
∂t −
with the property that Sym(St,
6t(t−1)
48t(t−1)
t
does not changes this property, and
factor ∂t . The coordinate transformation t 7→ t+1
will make the pullback formula in Theorem 2.3 somewhat nicer. Note that applying
5
1
+ 12(t−1)
to StASL2 also results in a differential operator such
the shift ∂t 7→ ∂t + 4t
4
that its fourth symmetric power has a right-hand factor ∂t . This differential operator
f There is a non-trivial automorphism of k(t)[∂t ] mapping StA4
is different from St.
to a multiple of itself, namely φ −t , 1 . It follows immediately from the proof of
t+1 12(t+1)
Klein’s theorem that this is the unique non-trivial automorphism of StA4 .
Proposition 2.2. — The differential Galois group G of StA4 is a central extension of
A4 by the cyclic group C4 .
SÉMINAIRES & CONGRÈS 13
PULLBACKS OF DIFFERENTIAL EQUATIONS
21
y y 1 2
Proof. — Let F be a fundamental matrix for StA4 , i.e., a matrix y10 y20 , where
{y1 , y2 } is a basis of solutions of StA4 . The determinant Det(F ) of F , satisfies the
V2
8t+3
differential operator ∂t + 6t(t+1)
=
StA4 . For g ∈ G, we have g(Det(F )) = Det(g) ·
8t+3
Det(F ), so the differential Galois group of ∂t + 6t(t+1)
is precisely the image of G
8t+3
under the determinant map. The differential Galois group of ∂t + 6t(t+1)
is easily
seen to be the group µ6 consisting of the sixth roots of unity. So G ⊂ H := {M ∈
GL2 (Q)| Det(M )6 = 1, M p ∈ A4 }, where M p denotes the image of M in PGL2 (Q).
By a q
calculation in Maple, we find a basis {y1 , y2 } of solutions for StA4 , with
y1 y2 =
a+1
4
a , y1
=
√
√
3(a−1)+2 a2 −a+1
, a3
a
+ t + 1 = 0. From this we see that the
Picard-Vessiot extension Q(t)(y1 , y2 ) lies in the degree 48 extension
s
s
√
√
p
2−a+1
4
a
+
1
3(a
−
1)
+
2
a
K := Q(t) a, a2 − a + 1,
,
a
a
of Q(t), where a3 + t + 1 = 0. In order to determine G precisely, we will make use
of the local exponents of StA4 . Let Ep denote the set of local exponents at the point
1
p. Then we have E0 = {0, 21 }, E−1 = { 14 , −1
12 } and E∞ = {0, 3 }. Now Proposition 5.1
in [vdPU00], provides us with an element g−1 ∈ G, which is conjugated to e2πiD ,
where D is the diagonal matrix with 41 , −1
12 on the diagonal. So the eigenvalues of g−1
−πi
πi
πi
3
2
6
}, and therefore Det(g−1 ) = e 3 . We have g−1
= −i · Id. So the kernel
are {e , e
p
of the natural map G → G has at least order 4, and we find that G has at least order
48. We already found that G had maximally order 48, so G is a central extension of
A4 by C4 of order 48, and K is a Picard-Vessiot extension for StA4 .
We will now give the pullback function for a second order differential operator
L ∈ k(x)[∂x ] with projective Galois group A4 . After applying a shift, we can suppose
(as in the case of StASL2 ) that Sym(L, 4) has a right-hand factor ∂x . This shift does
4
not change the pullback function. This shift can be found in the following way. By
representation theory it follows that the operator Sym(L, 4) has two degree one righthand factors, say (∂x + b1 ) and (∂x + b2 ). The bi are rational solutions of the Riccati
equation corresponding to Sym(L, 4), and therefore the bi can be computed. The
group Gal(k/k) acts on {b1 , b2 }, so we find that b1 , b2 ∈ k 0 (x) for some minimal field
k 0 ⊂ k of degree ≤ 2 over k. In fact this field k 0 is the field defined the beginning of this
0
chapter. To see this, let u = yy be an algebraic solution of the Riccati equation RL of
degree 4 over k(x). Then the sum b of the conjugates of u under the differential Galois
group of L is a rational solution of the Riccati equation corresponding to Sym(L, 4),
and we see that b ∈ k 0 (x) if and only if the minimal polynomial of u is defined over
k 0 (x).
Theorem 2.3. — Let L = ∂x2 + a1 ∂x + a0 , with a0 , a1 ∈ k(x), be a differential operator
with projective Galois group A4 such that Sym(L, 4) has a right-hand factor ∂x . Then
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
22
a0
1
.
L is the pullback of StA4 , with pullback function φ(t) := a9s0 ( a00 + 2a1 )2 , s = 48
The only other (weak) pullback is obtained by composition with the unique non-trivial
automorphism of StA4 .
Proof. — We will first show, that for the suitable choice of φ(t) no shift is needed.
By Klein’s theorem, there exists φ : k(t)[∂t ] → k(x)[∂x ], with L = (φ(t)0 )2 φ(StA4 ).
The Sym(StA4 , 4) has a right-hand factor ∂t , and because φ(Sym(StA4 , 4)) =
Sym(φ(StA4 ), 4), the Sym(L, 4) has a right-hand factor φ(∂t ). The Sym(L, 4)
has two right-hand factors of degree one, ∂x and ∂x − u for some u ∈ k(x), so
1
1
1
φ(∂t ) ∈ φ(t)
0 ∂x , φ(t)0 (∂x − u) . If φ(∂t ) = φ(t)0 ∂x we are done, otherwise consider
of StA4 . Then φ ◦ ψ is the other possible
the automorphism ψ := φ −t , 1
t+1 12(t+1)
pullback, with a different image for ∂t , so this image must be
may suppose that φ has no shift. We will now calculate φ(t).
1
φ(t)0 ∂x .
Therefore we
The formula for φ(t) can be obtained using the following trick. Write StA4 as
8t+3
s
0
∂t2 + s1 ∂t + s0 , so s0 = t(t+1)
2 and s1 = 6t(t+1) . In the following we will use φ(f ) =
1 2
d
d
φ(t)0 φ(f 0 ), where f ∈ k(t), and 0 denotes dx
or dt
. Applying φ to t = ss0 t+1
, we
0
2
2
φ(t)
s
1
s
0 2
get φ(t) = φ(s0 ) φ(t+1) = (φ(t)0 )2 φ(s0 ) φ(t+1) . Furthermore a0 = (φ(t) ) φ(s0 ), so
a0
φ(t)0 2
φ(t)0
= 3 a00 + 6a1 . Using a1 =
. We are done if we can prove φ(t+1)
φ(t) = as0 φ(t+1)
00
a00
φ(t)00 φ(t)00
φ(s0 )0 0
φ(t)0 φ(s1 )− φ(t)
φ(t)0 , we can write 3 a0 +6a1 as 3 2 φ(t)0 + φ(s0 ) +6 φ(t) φ(s1 )− φ(t)0 =
s0
φ(t)0
8t+3
2
+ t(t+1)
= φ(t+1)
3φ(t)0 φ( s00 ) + 6φ(t)0 φ(s1 ) = φ(t)0 φ − 3 1t + t+1
, which finishes
the proof.
Remark 2.4. — This pullback formula was found using semi-invariants. The representation of A4 in the PGL(kx1 +kx2 ) induces an action of A4 on k[x1 , x2 ]. A polynomial
∗
P in this ring is a semi-invariant if ∀ σ ∈ A4 ∃ cσ ∈ k such that σ(P ) = cσ P . There
are two semi-invariants H1 (x1 , x2 ), H2 (x1 , x2 ) of degree 4, such that for a basis of soH1 (y1 ,y2 )3
lutions {y1 , y2 } of StA4 we have H
3 = t + 1. Let {v1 , v2 } be a basis of solutions
2 (y1 ,y2 )
of L. Then we find
H1 (v1 ,v2 )3
H2 (v1 ,v2 )3
= φ(t + 1). The expressions H1 (v1 , v2 ), H2 (v1 , v2 ) are
0
i (v1 ,v2 )
so-called exponential solutions of Sym(L, 4), i.e., H
Hi (v1 ,v2 ) ∈ k(x). These exponential
solutions can be found (up to constants). We can also give a formula for one of these
exponential solutions in terms of the other and the coefficients of L. So if we suppose
H1 (v1 , v2 ) = 1, we find a formula for the pullback function in terms of the coefficients
of L.
Corollary 2.5. — Let L = ∂x2 + a1 ∂x + a0 be a differential operator, with projective
Galois group A4 . There are two differential operators Li , i = 1, 2 obtained from L by
a shift ∂x 7→ ∂x + bi , such that Sym(Li , 4) has a right-hand factor ∂x . Let Fi be the
F0
1
and b2 = b1 − 12(F11+1) .
pullback function of Li as in Theorem 2.3. Then F2 = F−F
1 +1
SÉMINAIRES & CONGRÈS 13
PULLBACKS OF DIFFERENTIAL EQUATIONS
23
Proof. — We recall that the unique non-trivial automorphism of StA4 is φ −t ,
1
t+1 12(t+1)
F12 φF1 (StA4 )
We have
must have φF2 ,b1 −b2
= L1 = φt,b1 −b2 (L2 ) = F22 φF2 ,b1 −b2 (StA4 ). Because b2 6=
F0
1
= φF1 ◦ φ −t , 1 , so F2 = F−F
and b2 = b1 − 12(F11+1) .
1 +1
t+1 12(t+1)
.
b1 we
2.2. Projective Galois group S4 or A5 . — These two cases can be treated in
almost the same way as the A4 -case. We will only give the differences. The new
standard equations we will use are:
8t + 3
s
StGp := ∂t2 +
∂t +
6t(t + 1)
t(t + 1)2
5
11
with s = 576
for Gp = S4 , and s = 3600
for Gp = A5 . In both cases there are
no automorphisms (i.e., no automorphisms of Q(t)[∂t ] mapping StGp to a multiple
of itself). Using representation theory we find that S4 and A5 have a unique semiinvariant of degree m = 6, 12, respectively. The new standard equations are chosen
in such a way that Sym(StGp , m) has a right-hand factor ∂t .
Proposition 2.6. — The Galois group of StGp , Gp ∈ {S4 , A5 } is a central extension
of Gp by the cyclic group C6 .
Proof. — We start by calculating G1 , the Galois group of StS4 . The local exponents
5
1
of StS4 are given by E0 = 0, 21 , E−1 = 24
, − 24
and E∞ = 0, 31 . As in the
A4 case, we conclude that there is an element g−1 ∈ G1 of order 24 with eigenvalues
− 1 πi 5 πi 1
1
4
e 12 , e 12
, so with Det(g−1 ) = e 3 πi . We have that g−1
= e− 3 πi ·Id is an element
p
in the kernel of the map G1 7→ G1 = S4 . We find that this kernel has at least order
6, so G1 has order ≥ 144. Reasoning as in the A4 -case we find that G1 has order 144,
and it is a central extension of S4 by C6 .
We will now calculate the Galois group G2 of StA5 . The local exponents of StA5
1
1
are given by E0 = {0, 21 }, E−1 = 11
60 , − 60 and E∞ = 0, 3 . So there is an element
11
1
1
h−1 ∈ G2 of order 60, with eigenvalues e− 30 πi , e 30 πi . We have Det(h−1 ) = eπi 3 , so
p
h5−1 is an element in the kernel of the map G2 7→ G2 = A5 . Again reasoning as in the
A4 -case we get that G2 has order 360, and it is a central extension of A5 by C6 .
Let a differential operator L with projective Galois group Gp ∈ {S4 , A5 } be given.
Then after applying a shift we can assume that Sym(L, m) has a right-hand factor
∂x , where m = 6 if Gp = S4 and m = 12 if Gp = A5 . The shift we have to apply
b
, with b a rational solution of the Riccati equation corresponding to
is ∂x 7→ ∂x + m
Sym(L, m). From the uniqueness of b it also follows that the field k 0 as defined in the
beginning of this chapter is equal to k (compare the A4 -case).
It is now clear that we get the following generalization of Theorem 2.3.
Theorem 2.7. — Let L = ∂x2 + a1 ∂x + a0 , with a0 , a1 ∈ k(x), be a differential operator,
1
with projective Galois group Gp ∈ {A4 , S4 , A5 }. Set m = 4, s = 48
if Gp = A4 , set
11
5
if Gp = S4 , and set m = 12, s = 3600
if Gp = A5 . If Sym(L, m)
m = 6, s = 576
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
24
has a right-hand factor ∂x , then L is the pullback of StGp , with pullback function
2
a0
φ(t) := a9s0 a00 + 2a1 .
e ∈ k(x)[∂x ] be a second
2.3. Projective Galois group Dn , n ≥ 2. — Let L
e 2)
order differential operator with Gp = Dn . Then for n ≥ 3, we have that Sym(L,
has precisely one right-hand factor of degree one over k(x), say ∂x + a. The shift
e into a differential operator L, such that Sym(L, 2) has a
∂x 7→ ∂x − a2 transforms L
e 2) has
right-hand factor ∂x . In the case Gp = D2 ∼
= Z/2 × Z/2, the operator Sym(L,
three degree one right-hand factors. So there are three possible shifts transforming
e into a differential operator L such that Sym(L, 2) has a right-hand factor ∂x . We
L
note that from the above we can conclude that the field k 0 defined in the beginning
of this chapter satisfies k 0 = k for Gp = Dn , n > 2 and [k 0 : k] ≤ 3 for Gp = D2 (see
the A4 -case for details).
A calculation shows that if L = ∂x2 + a1 ∂x + a0 satisfies Sym(L, 2) = ∗ · ∂x , then
R√
0
a0
1
−a0 dx
. We will now
a0 = −2a1 and a basis of solutions is given by {y, y }, y = e
calculate the possibilities for the differential Galois group G of an operator L with
these properties, and moreover with Gp = Dn , n ≥ 2. We have that the extension
k(t) ⊂ K p = k(t)(y 2 ) is Galois with Galois group Dn . So k(t)(y 2 ) is a differential
field, and consequently K = k(t)(y) is a differential field, too. Therefore it is a
Picard-Vessiot extension for L. The extension k(t)(y 2 ) ⊂ k(t)(y) has degree one or
two.
A small calculation shows that on the basis {y, y1 }, the differential Galois group G
0
0 b
. The image of G in PGL2 must be
lies in a0 a−1
∪ b−1
0
ζ2n
0
0 1
,
Gp = Dn =
−1
0 ζ2n
1 0
where ζ2n is a 2n-th root of unity. We have |G|/|Gp | ≤D2 and we find E
that |G| =
ζn 0
p
p ∼
0
1
|G | can only occur when n is odd. Then G = G = ( 1 0 ) , 0 ζ −1
or G =
n
E
D
ζ
0
0 −1
, 0n ζ −1 , where we can take ζn = −ζ2n . In case |G| = 2|Gp | we have
−1 0
D n E
ζ2n 0
D2n ∼
= G = ( 01 10 ) , 0 ζ −1 .
2n
We will use the following new standard equations:
StDn := ∂t2 +
t
1
∂t − 2 2
.
t2 − 1
4n (t − 1)
For n > 2 we have one non-trivial automorphism of StDn , namely ψ = φ−t . The group
of automorphisms of StD2 is isomorphic to S3 , and has generators ψ, ψ1 , with ψ as
above, and ψ1 = φ t+3 ,− 1 . The operator Sym(StDn , 2) has a right-hand factor
t−1
4(t−1)
∂t . The differential
Galois
group of StDn is D2n , which follows from the fact that
√
1
1
y, y , y = (t + t2 − 1) 2n is a basis of solutions. Indeed, y satisfies the irreducible
polynomial T 4n − 2tT 2n + 1.
SÉMINAIRES & CONGRÈS 13
PULLBACKS OF DIFFERENTIAL EQUATIONS
25
Lemma 2.8. — Sym(StDn , 2n) has a basis of rational solutions {1, t}. Furthermore t
t
is up to constants the unique rational solution of the right-hand factor ∂t2 + t2 −1
∂t −
1
(t2 −1) of Sym(StDn , 2n).
Proof. — Write StDn = ∂t2 + s1 ∂t + s0 . We have that StDn has a basis of solutions
1
y, y . A direct calculation (or an examination of the explicit form of the solutions
presented above) shows that for any non-zero integer k, the operator ∂t2 + s1 ∂t + k 2 s0
has as basis of solutions {y k , y −k }. Therefore ∂t2 + s1 ∂t + k 2 s0 is a right-hand fact
∂t − (t21−1) is a right-hand factor of
tor of Sym(StDn , k). In particular ∂t2 + t2 −1
t
Sym(StDn , 2n). Now observe that t is a solution of ∂t2 + t2 −1
∂t − (t21−1) . We note
that 1 = y n · y −n is also a solution of Sym(StDn , 2n). It is easily seen that the
space of rational solutions of Sym(StDn , 2n) is 2-dimensional. Indeed the differential
Galois group D2n of StDn is generated by σ, τ with σ(y) = ζ2n y, with ζ2n a primitive 2n-th root of unity, and τ (y) = y −1 . A basis of solutions of Sym(StDn , 2n) is
{y 2n , y 2n−2 , · · · , y −2n , and it immediately follows that {1, y 2n + y −2n } is a basis of
the rational solutions of Sym(StDn , 2n).
Theorem 2.9. — Let L = ∂x2 + a1 ∂x + a0 be a differential operator, with projective
differential Galois group Dn , n ≥ 3, such that Sym(L, 2) has a right-hand factor ∂x .
The right-hand factor ∂x2 + a1 ∂x + 4n2 a0 of Sym(L, 2n) has, up to constants, a unique
0
rational solution, say a. Write b := aa , then b is independent of the choice of a. Now
− 1
2
L is the pullback of StDn , with pullback function φ(t) := 1 + 4nb2 a0 2 . The only
other pullback function is −φ(t).
Proof. — The proof is somewhat similar to the proof of Theorem 2.3. The fact that
no shift is needed follows from the fact that Sym(L, 2) has a unique degree one righthand factor. An argument as in the proof of Lemma 2.8 shows the existence and
unicity of the rational solution a. As before, write StDn = ∂t2 + s1 ∂t + s0 . From
− 1
−1
the expression s0 = 4n2 (t
1 + 4n21s0 t2 2 . The pullback map
2 −1) it follows that t =
− 21
02
transforms this expression into φ(t) = 1 + 4n2φ(t)
, since a0 = φ(t)02 φ(s0 ). By
a0 φ(t)2
2
the previous lemma, t is a rational solution of ∂t + s1 ∂t + 4n2 s0 . Therefore φ(t) is a
2 2
1
rational solution of φ ∂t2 + s1 ∂t + 4n2 s0 = φ(t)
(∂x + a1 ∂x + 4n2 a0 ). Consequently
0
1
0
−2
b2
. We see that a different choice for
b = φ(t)
φ(t) , and it follows that φ(t) = 1 + 4n2 a0
the square root changes φ(t) into −φ(t). It also follows from Klein’s Theorem (1.9)
that −φ(t) is the only other possible pullback function.
Remark 2.10. — In the above proof, we see that φ(t) = c · a for some constant c ∈ k,
and a as in Theorem 2.9.
For the D2 case, we get the following variant of Theorem 2.9.
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
26
Theorem 2.11. — Let L = ∂x2 + a1 ∂x + a0 be a differential operator, with projective
differential Galois group D2 , such that Sym(L, 2) has a right-hand factor ∂x . Then
Sym(L, 2) has three right-hand factors of degree one, say ∂x , ∂x +b1 , ∂x +b2 . Write b :=
4b1 b2
b2
− 12
.
b1 +b2 . Now L is the pullback of StD2 , with pullback function φ(t) := (1 + 4n2 a0 )
The other (weak) pullbacks are obtained by composition with automorphisms of StD2 .
Proof. — By the argument in the proof of Theorem 2.9, we only have to show that
0
b = φ(t)
φ(t) . We have that Sym(StD2 , 2) has three right-hand factors of degree one
1
1
∂t , ∂t + 12 t+1
, ∂t + 12 t−1
. So the three degree one right-hand factors of L are ∂x , ∂x +
0
0
1 φ(t)
1 φ(t)
2 φ(t)+1 , ∂x + 2 φ(t)−1 .
0
that b = φ(t)
φ(t) .
Therefore we can write b1 =
0
1 φ(t)
2 φ(t)+1 , b2
=
0
1 φ(t)
2 φ(t)−1 .
It follows
Algorithm 2.12 (Determining n). — In the above, we assumed that the projective differential Galois group was known. For a second order differential operator L ∈
k(x)[∂x ] it is not hard to determine whether or not the projective differential Galois group is a group Dn , n ∈ N≥2 ∪ ∞. For completeness, we give an algorithm to
determine n in case k is a number field, and L is a second order differential operator
with dihedral differential Galois group. We note that this is a known algorithm (see
[BD79, Section 6]).
As above we Rmay
assume that Sym(L, 2) has a right-hand factor ∂x . So L has
√
a solution y = e −a0 dx . Let K = k(x)(y, y 0 ) be a Picard-Vessiot extension for L.
0
√
√
Consider the tower of fields k(x) ⊂ k(x, −a0 ) ⊂ K, where −a0 = yy . Since we
assume the projective Galois group to be dihedral, it follows that a0 is not a square
√
in k(x). The field extension k(x, −a0 ) ⊂ K = k(x)(y) is infinite in case n = ∞,
√
and otherwise cyclic of order n or 2n. Consider the differential ω := 2 −a0 dx on the
√
hyperelliptic curve H with function field k(H) := k(x, −a0 ). We want to find the
2
√
degree over k(x, −a0 ) of the solution y 2 of the equation ω = dy
y2 .
Suppose y is algebraic over k(x). Then by the action of the differential Galois group
P
we find that y 2n ∈ k(H). Let D := Div(y 2n ) be the divisor of y 2n . If D =
ai [pi ],
dy 2n
then the residue of nω = y2n in pi is ai . We also find that ω has only poles of
order 1 and no zeroes. So a necessary condition for y to be algebraic is ordh (ω) ∈
{−1, 0}, resh (ω) ∈ Q ∀ h ∈ H. In the following we will assume ω to satisfy these
easily verifiable conditions.
Let m1 be the least common multiple of the denominators of all nonzero residues
P
of ω. Then D1 := resh (m1 ω)[h] is a divisor on H, and we want to find the smallest
integer m2 such that m2 D1 is a principal divisor. If such an integer m2 exists, then
n = m1 m2 and otherwise n = ∞. Indeed if m2 D1 = Div(f ), f ∈ k(H), then df
f =
1
m1 m2 ω and we can take y 2 = f m1 m2 . Because m1 m2 ω is defined over k, one finds
using Hilbert theorem 90 that we may suppose f to be defined over k (compare the
argument in the proof of Lemma 1.5).
SÉMINAIRES & CONGRÈS 13
PULLBACKS OF DIFFERENTIAL EQUATIONS
27
We want to find the order m2 of the element D1 ∈ Jac(H)(k). We will use the
following known result.
Lemma 2.13. — Let k be a number field, and A/k an abelian variety. Let p be a prime
ideal in the ring of integers Ok of k, extending the prime number p. Suppose:
1. A has good reduction at p,
2. the ramification index ep is smaller than p − 1.
Then reduction modulo p yields an injective homomorphism
A(k)tors −→ A mod p(Ok /p).
Proof. — Let a ∈ A(k)tors be a point of prime order `. The subgroup hai ⊂ A defines
a constant group scheme of order ` over k. Since ep < p − 1, by Theorem 4.5.1 in
[Tat97] this group scheme extends uniquely to the finite flat group scheme Z/`Z ,
Op
where Op denotes the completion of O at p. This shows that a reduces modulo p to a
point of again order `. So the kernel of the reduction map A(k)tors → A mod p(Ok /p)
contains no points of prime order, and therefore the map is injective.
Now let p be a prime ideal in the ring of integers of k, such that H has good
reduction modulo p and ep < p − 1. Then we can apply the above lemma to the
abelian variety Jac(H), and the prime ideal p. It follows that if ord(D1 ) < ∞ then
this order equals the order of D1 in Jac(H) mod p. We can calculate this order m
f2
using the algorithm in [GH00, 3.2]. Write n
e=m
f2 m1 . If ∂x2 + a1 ∂x + 4e
n2 a0 has a
rational solution then n = n
e, otherwise n = ∞.
Note that it is not strictly necessary to calculate the order of D1 in a reduction
of H. The Hasse-Weil bound gives an upper bound for this order. This produces a
number N which is an upper bound for n in case n is finite. Now n is the smallest
integer such that ∂x2 + a1 ∂x + 4n2 a0 has a rational solution. If there is no such solution
for n < N , then n = ∞.
We remark that in case k = Q the order of D1 can be calculated using the computer
algebra package MAGMA.
3. A generalization of Klein’s theorem
In this section we will give a variant of Klein’s theorem for third order operators.
We will define a notion of standard operator, such that each differential operator
L with finite irreducible differential Galois group G ⊂ SL3 is a weak pullback of a
standard operator for G. We start by giving an alternative construction of standard
operators of order 2, more in line with our construction of order 3 standard operators,
which we will give subsequently. In this section we will work over an algebraically
closed field of characteristic zero, denoted by C.
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
28
3.1. Standard operators of order 2 revisited. — Let V be a 2-dimensional
vector space over C, and let G ⊂ SL(V ) be an irreducible finite group.
Notation 3.1
– Z(G) denotes the center of G. We have Gp ∼
= G/Z(G) (with Gp the image of G
in PGL(V )).
– P(V ) := Proj C[V ], where C[V ] is the symmetric algebra of V .
– K p := C(P(V )), the function field of P(V ). Note that K p = C[V ]((0)) , i.e., K p
consists of quotients of homogeneous elements of C[V ] of the same degree.
p
There is an action of Gp on K p , and by Lüroth’s theorem we can write (K p )G as
C(t), where t is unique up to a Möbius-transformation. We will construct a Galois
extension K p ⊂ K, such that Gal(K/C(t)) ∼
= G, and a G-invariant C-vector space
W ⊂ K that is G-isomorphic to V . The corresponding monic differential operator
with solution space W will be called a standard operator for G.
Construction 3.2 (Second order standard operators). — For 0 6= ` ∈ V , we can see V`
as a set of functions on P(V ). This gives an injection V` ,→ K p . For σ ∈ G we have
` V
V
V
V
σ V` = σ(`)
` . The set ` is not G-invariant, for σ( ` ) = ` ∀ σ ∈ G would imply
`
σ(`)
∈ C ∀ σ ∈ G, but there are no G-invariant lines in V . Roughly spoken, we want
to construct some f in an extension of K p such that f V` is a G-invariant vector space.
`
The map c : G → (K p )∗ , σ 7→ σ(`)
is a 1-cocyle in H 1 (G, (K p )∗ ). We want to use
Hilbert theorem 90 to construct a G-invariant space, but the problem is that G is not
the Galois group of K p /C(t), which is Gp . We can avoid this problem by considering
the map d : Gp → (K p )∗ , τ 7→ c(σ)2 , where σ ∈ G is some lift of τ ∈ Gp . The value
c(σ)2 is independent of the chosen lift. So d is an element of H 1 (Gp , (K p )∗ ), and
therefore Hilbert theorem 90 implies that there exists an f ∈ (K p )∗ , with d(τ ) =
f
f
`2
p
p
τ (f ) ∀ τ ∈ G . In other words, σ̄(f ) = σ(`)2 ∀ σ ∈ G, where σ̄ ∈ G denotes the
image of σ. This f is unique up to multiplication by an element in C(t)∗ . We define
K := K p (f2 ), by f22 = f . We have f2 ∈
/ K p , for otherwise Ve := f2 V` would have a
Gp -action, which is impossible because G Gp has no section. The field extension
C(t) ⊂ K is a Galois extension. This follows from the fact that for τ ∈ Gp with lift
σ ∈ G, we have τ (f ) = c(σ)2 f , so the square roots of the conjugates of f are present.
Note that the choice of ` ∈ V is irrelevant, because for an other choice `0 , we can take
0
f20 = f2 `` , which leaves Ve unchanged.
Lemma 3.3. — Using the above notations, there is a natural isomorphism Gal(K/C(t))
∼
= G, and Ve := f2 V` is G-invariant and G-isomorphic to V .
Proof. — We will extend the Gp -action on K p to a G-action on K. Write K =
K p + K p f2 . We define a G-action on K by σ(α + βf2 ) = σ̄(α) + σ̄(β) σ(`)
` f2 . Using
SÉMINAIRES & CONGRÈS 13
PULLBACKS OF DIFFERENTIAL EQUATIONS
f
σ̄(f )
=
29
`2
σ(`)2
it is clear that G acts by automorphisms. A counting argument shows
G = Gal(K/C(t)), and clearly Ve is G-isomorphic to V .
e = ∂ 2 + a∂t + b ∈ C(t)[∂t ] with solution
To Ve corresponds a differential operator L
t
e corresponds to a different
space Ve . We will now show that the normalization L of L
y y 1 2
e
choice for f . Let {y1 , y2 } be a basis of solutions of L. Then q := det y10 y20 lies in
C(t) because the differential Galois group is unimodular. We have q 0 = −aq. We can
e by making the shift ∂t 7→ ∂t − 1 a which changes the solution space Ve
normalize L
2
into q2−1 Ve , with q22 = q. This corresponds to replacing the f above by q −1 f . This is
allowed, because f was defined up to multiplication by elements of C(t). We have that
K p is a purely transcendental extension of C. The Galois extension C(t) ⊂ K p , with
Galois group Gp is ramified in three points, which we can suppose to be {0, 1, ∞} by
making an appropriate choice for t. For any such t we call the constructed operator
L a standard operator for G.
With the appropriate choice for t, the constructed differential operator L is equal
to the differential operator StG defined in Section 1.1. This follows from Theorem
3.9, which we prove for third order operators, but which is also valid for second order
operators.
3.2. Standard operators of order 3. — Now let V be a 3-dimensional vector
space over C, and again let G ⊂ SL(V ) be an irreducible finite group. We will
now give a construction of third order standard operators, with projective differential
Galois group isomorphic to Gp . This construction is to some extend a copy of the
construction in the previous section.
Definition 3.4. — Let Z ⊂ P(V ) be a Gp -invariant irreducible curve, such that
Z/Gp ∼
= P1C . Note that by Remark 3.8 such a curve always exists. We write
C(t) := C(Z/Gp ). We define a standard operator corresponding to Z and Gp , to be
a differential operator LZ ∈ C(t)[∂t ] given by the construction below.
Construction 3.5 (Standard operator corresponding to Z). — For the construction of
standard operators, we must consider two different cases for Gp . Let π : SL(V ) →
PGL(V ) be the canonical map. We have that the center of G is trivial, or a cyclic
group of order three. We will write C3 for a cyclic group of order three. The cases
we have to consider are:
1. the natural map π −1 (Gp ) → Gp has no section, so G = π −1 (Gp ),
2. the natural map π −1 (Gp ) → Gp has a section, so π −1 (Gp ) ∼
= C3 × Gp . In this
−1
p
p
∼
case G = π (G ) or G = G .
We will now give the construction of standard operators case by case.
Case 1. For 0 6= ` ∈ V , we regard V` as a set of functions on P(V ), which induce
functions on Z. This gives a map V` → C(Z), which is an injection, for otherwise Z
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
30
would be a line in P(V ). This is impossible because G is irreducible, and therefore
has no G-invariant planes.
As in the construction of second order standard operators, we consider the cocycle
3
`
d : Gp → C(Z)∗ , σ 7→ σ(`)
. Then d ∈ H 1 (Gp , C(Z)∗ ), and therefore Hilbert
f
p
theorem 90 implies that there exists an f ∈ C(Z)∗ , with d(τ ) = τ (f
) ∀ τ ∈ G . Now
V
p
3
take f3 , with f3 = f . We have f3 ∈
/ C(Z), for otherwise f3 ` would be G -invariant,
which is impossible because G Gp has no section. So we consider the degree 3
extension C(Z) ⊂ C(Z)(f3 ). We have that C(t) ⊂ C(Z)(f3 ) is a Galois extension.
As in the second order case, we have Gal(C(Z)(f3 )/C(t)) = G, and Ve := f3 V` is
G-invariant.
e As in the second order
To Ve corresponds a unique monic differential operator L.
e
case, normalizing L corresponds to making a different choice for f . This normalizae is now uniquely determined and will be called the standard differential
tion LZ of L
operator corresponding to Z. Note that the standard operator depends on the choice
of t. By construction, the differential Galois group of LZ is G.
Case 2. Let H be a lift of Gp in SL(V ) that is isomorphic to Gp . Now Hilbert
theorem 90, applied to H 1 (H, C(Z)∗ ), implies the existence of an f ∈ C(Z)∗ with
f
`
V
e
e
h(`) = h(f ) ∀ h ∈ H. So V := f ` is H-invariant. This defines an operator L which in
e a standard operator
general is not in normal form. We call the normalization LZ of L
for Z. The projective differential Galois group of LZ is Gp , but the differential Galois
group can be different from G!
From the construction above, we get the following properties for a standard operator LZ with solution space VZ and Picard-Vessiot extension KZ .
1. LZ is uniquely defined, up to a Möbius-transformation of t.
2. The projective differential Galois group of LZ is isomorphic to Gp , and P(VZ )
is Gp -isomorphic to P(V ).
Z(G) ∼
3. There is a Gp -equivariant isomorphism KZ
= C(Z).
3.3. A Klein-like theorem for order 3 operators. — Let G ⊂ SL3 be a finite irreducible group. Let L be a monic third order differential operator over C(x)
with Picard-Vessiot extension K, and solution space V ⊂ K. We assume that the
representation of the differential Galois group in V is isomorphic to G.
Remark 3.6. — Let L1 = ∂x3 + a∂x2 + · · · be a differential operator with finite differ0
ential Galois group in GL3 . Then a = − qq , q = det(F ), where F is a “fundamental
matrix” as in 1.3.1. In particular q is algebraic. Applying the shift ∂x 7→ ∂x − 13 a to L1
produces a differential operator L with differential Galois group in SL3 . Writing V1
for the solution space of L1 , the solution space of L is q3−1 V1 , q33 = q. So the solutions
SÉMINAIRES & CONGRÈS 13
PULLBACKS OF DIFFERENTIAL EQUATIONS
31
of L are also algebraic, and therefore the differential Galois group of L is finite. We
will prove that L is the pullback of some standard equation, and therefore L1 is a
pullback of this standard equation, too. So the restriction to the case G ⊂ SL(3) is
no real restriction.
We will start by constructing an irreducible curve Z ⊂ P(V ) corresponding to L.
This Z will be Gp invariant, and satisfy Z/Gp ∼
= P1C .
Construction 3.7. — The map V → K extends to a map ϕ : C[V ] → K. This
Q
map is G-equivariant. Now take some v0 ∈ V \ {0}. For f := σ∈G σ(v0 ), we
can consider the ring (C[V ][ f1 ])0 of homogeneous elements of degree zero in C[V ]f .
We can extend ϕ to a map ψ : C[V ] f1 0 → K. Write I := ker(ψ). We have that
C[V ] f1 0 = O(P(V )\Z(f )), where Z(f ) is the variety given by f = 0. Now I defines
a subset Z1 ⊂ P(V ) \ Z(f ), and we write Z for its closure in P(V ). Note that Z is
independent of the choice of v0 . The function field of Z is C(Z) = frac C[V ] f1 0 /I .
Furthermore ψ induces a Gp -equivariant injection of C(Z) in K p := K Z(G) . The fixed
p
field C(Z)G is a subfield of C(x) of transcendence degree 1 over C, so it can be written
as C(t), for some t ∈ C(Z), where t is unique up to a Möbius transformation. We
conclude that L defines a Gp -invariant irreducible curve Z ⊂ P(V ), with Z/Gp ∼
= P1C .
Remark 3.8. — We can use the above construction to show that for every finite
group G ⊂ SL(3) there exists a curve Z as in Definition 3.4. Indeed, let G ⊂ SL(3)
be a finite group. We can make a Galois extension C(z) ⊂ K with Galois group G,
by realizing G as a quotient of the fundamental group of P1C minus a finite number
of points. As in [vdPU00], we can construct a third order differential operator over
C(z), with Picard-Vessiot extension K, such that the Galois action on the solution
space equals G ⊂ SL(3). Now the construction above gives the desired curve Z.
We can now state an equivalent of Klein’s theorem, for third order operators.
Theorem 3.9. — Let L and G be as above. These data define a Gp -invariant projective
curve Z ⊂ P(V ) with Z/Gp ∼
= P1C . If LZ is a corresponding standard differential
operator, then L is a weak pullback of LZ .
Proof. — From the construction of Z above, we get the following diagram:
C(x)
∪
C(t)
⊂
⊂
Kp
⊂
∪
C(Z)
K
We have that the Gp -action on C(Z) corresponds with the Gp -action on K p . Let KZ
be the Picard-Vessiot extension of LZ . By the definition of a standard operator we can
Z(G)
write KZ
= C(Z). Let VZ ⊂ KZ be the solution space of LZ . In the compositum
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
32
K of K and KZ over C(Z), we have the identity VZ = f` V , for the appropriate f, ` as
defined in the construction of LZ . We will now use Notation 1.7. If F is the image of
d
t in C(x), then the pullback φF (LZ ) again has solution space VZ . The derivation dt
d
d
dF d
extends uniquely to K. Also dx extends uniquely to K, and dx (a) := dx dt (a), a ∈ K.
d f
So we can define b := dx
( ` )/( f` ). Applying the shift ∂x 7→ ∂x + b to φF (LZ ) defines
a differential operator with solution space V . So (F 0 )2 φF,b (LZ ) = L, and therefore L
is a weak pullback of LZ .
3.4. Examples with Galois group A5 or G168 . — In this subsection we will
give, for the cases G = A5 and G = G168 , all possible non-singular curves Z, as in
Definition 3.4. We will also give an example of a standard operator with projective
differential Galois group A5 .
Consider A5 ⊂ SL(3, C), with generators
1 0
0 ζ5
0 0
0
0
ζ5−1
1
2
1
, √ 1 ζ52 + ζ5−2
5
1 ζ5 + ζ5−1
2
ζ5 + ζ5−1
ζ52 + ζ5−2
Here ζ5 is a primitive 5-th root of unity.
We have an action D
of A
polynomial ring C[x, y, z]. It acts on linear terms
E
5a onthe
cx
, and this action is extended to all of C[x, y, z].
by g(ax + by + cz) = g b , y
z
c
In [Ben96] we find the basic invariants:
fn := cn 5
n
2 −1
n
4 X
x + ζ5i y + ζ5−i z
n
√
x +
5
i=0
!
, n ∈ {2, 6, 10}
We take as constants c2 = 12 , c6 = 1, c10 = 3.
There is one more basic invariant f15 which is the determinant of the Jacobian
matrix of (f2 , f6 , f10 ). So we have C[x, y, z]A5 = C[f2 , f6 , f10 , f15 ], where
f2 = x2 + yz,
f6 = 2 (13x6 + 3xy 5 + 15x4 yz + 45x2 y 2 z 2 + 10y 3z 3 + 3xz 5 ,
f10 = 3 626x10 + y 10 + 90x8 yz + 1260x6 y 2 z 2 + 4200x4 y 3 z 3 + 3150x2 y 4 z 4
+252y 5z 5 + z 10 + (252x5 (y 5 + z 5 ) + 840x3 yz + 360xy 2 z 2 )(y 5 + z 5 ) ,
f15 = 180 2x + (ζ5 + ζ54 )(y + z)
2x + (ζ52 + ζ53 )(y + z) 2x + (1 + ζ5 )y + (1 + ζ54 )z
2x + (1 + ζ52 )y + (1 + ζ53 )z 2x + (1 + ζ53 )y + (1 + ζ52 )z
2x + (1 + ζ54 )y + (1 + ζ5 )z 2x + (ζ5 + ζ52 )y + (ζ53 + ζ54 )z
2x + (ζ52 + ζ54 )y + (ζ5 + ζ53 )z 2x + (ζ53 + ζ54 )y + (ζ5 + ζ52 )z
2x + (ζ5 + ζ53 )y + (ζ52 + ζ54 )z (y − z)(y − ζ5 z)(y − ζ52 z)(y − ζ53 z)(y − ζ54 z).
SÉMINAIRES & CONGRÈS 13
PULLBACKS OF DIFFERENTIAL EQUATIONS
33
We have the relation
1 2
3
2
f = 3f10
− 1590f10
f6 f22
400 15
2 5
+ 25014f10
f2 − 90f10 f63 f2 + 285840f10f62 f24
− 8928000f10f6 f27 + 70060500f10f210 + 18f65 + 14860f64f23
− 17651900f63f26 + 810582000f62f29
− 12634745000f6f212 + 65956225000f215.
We want to find all irreducible A5 -invariant plane curves Z, with Z/A5 ∼
= P1C .
Such a curve Z is given by f = 0, for some f ∈ C[f2 , f6 , f10 , f15 ]. We get a Galois
covering Z → Z/A5 . The ramification points of this covering are points in P2C which
are fixed by a cyclic subgroup of A5 . So to calculate the genus of Z/A5 and the
ramification data, we need information on the points in P2C fixed by a cyclic subgroup
of A5 . From [Web96] we get the following table. The first column gives the type
of cyclic subgroup of A5 . The second column gives the number of subgroups of that
type. The third column gives the number of points in P2C , which have a stabilizer of
the type given by the first column.
H
C2
C3
C5
# pts.
15 ∞
10 20
6
12
There are 15 lines in P2C , given by f15 = 0, and the points with stabilizer C2 are
the points that lie on precisely one of these lines. Note that each line as a whole is
invariant under a group C2 × C2 ⊂ A5 .
From this data we get the following information. For a branch point of the covering Z → Z/A5 , the ramification index e must be in {2, 3, 5}. Then the stabilizer
of a ramification point above this branch point is Ce . Above a branch point with
ramification index 3, there lie 20 points. So there is at most one branch point with
ramification index 3. In the same way we see that there is at most one branch point
with ramification index 5.
The ramification points with ramification index 2 are intersection points of Z with
Z(f15 ) := {p ∈ P2C |f15 (p) = 0}. If Z = Z(f ), and f has degree d, f 6 | f15 , then for a
fixed line l ⊂ Z(f15 ), Z ∩ l consists of at most d points. Such a line l is fixed by a
group D2 , so a point p ∈ Z ∩l with stabilizer C2 has a conjugate in Z ∩l different from
p. All lines in Z(f15 ) are images under G of l, so all branch points with ramification
index 2 are given by the images of Z ∩ l in Z/A5 . We see that there are at most d2
such branch points.
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
34
Now we can use Hurwitz’s formula to calculate all possibilities for non-singular Z.
P
Hurwitz’s formula states 2g − 2 = 60(2g0 − 2) + 60 i eie−1
. Here i runs over the
i
branch points of the covering Z → Z/A5 , and ei are the corresponding ramification
indices. Further, g denotes the genus of Z, and g0 denotes the genus of Z/A5 . We
write ni for the number of branch points with ramification index i, and d for the
. So we can
degree of f, Z = Z(f ). Then for non-singular Z, we have g = (d−1)(d−2)
2
2
rewrite Hurwitz’s formula as d − 3d + 120 = 120g0 + 30n2 + 40n3 + 48n5 .
If g0 = 0, the restrictions n3 , n5 ≤ 1, n2 ≤ d2 give the bound d ≤ 15. A computation
in Maple shows that the homogeneous irreducible nonsingular f ∈ C[f2 , f6 , f10 , f15 ] of
degree ≤ 15 lie in the set {f2 , λf23 + f6 , λf25 + µf22 f6 + f10 , λf26 + µf23 f6 + νf62 + f2 f10 |
λ, µ, ν ∈ C}.
For such a polynomial f of degree d, the values of n2 , n3 , n5 can be computed
using Hurwitz’s formula. For d ∈ {10, 12}, there is the possibility that g0 = 1, but
an explicit calculation of the number of intersection points of f10 and f62 + f2 f10 with
the invariant line y = z rules out this possibility. We find the following table for the
possibilities for d, n2 , n3 , n5 , for non-singular Z.
d n2
2
1
3
6
10 5
12 6
n3
1
0
1
0
n5
1
1
0
1
From this table, we can see that the 12 points with stabilizer C5 lie on Z(f2 ) and on
Z(f6 ). Therefore by Bezout’s theorem, they are the points Z(f2 ) ∩ Z(f6 ). So we have
a complete list of all non-singular curves Z satisfying definition 3.4, and we see that
there are infinitely many such curves Z.
Unfortunately we are not able to give a complete list of all singular curves Z, with
Z/A5 ∼
= P1C . We can give the list up to a certain degree. By the previous, we see that
the singular curves of degree 10 are of the form f25 + λf10 , λ ∈ C∗ , and the genus is
36. For degree 12 we find the family f26 + λf23 f6 + µf62 , λ ∈ C, µ ∈ C∗ of genus 19.
For degree 16, all irreducible curves in our family are non-singular, so here g0 ≥ 1.
The group G168 . — We take G168 ⊂ SL(3, C), with generators:
ζ7
0
0
0
ζ72
0
5
ζ7 − ζ72
0
0 , ζ76 − ζ7
ζ73 − ζ74
ζ74
Here ζ7 is a primitive 7-th root of unity.
SÉMINAIRES & CONGRÈS 13
ζ76 − ζ7
ζ73 − ζ74
ζ75 − ζ72
ζ73 − ζ74
ζ75 − ζ72 .
ζ76 + ζ7
PULLBACKS OF DIFFERENTIAL EQUATIONS
35
In [Ben96] we find that the ring of invariants for G168 is C[f4 , f6 , f14 , f21 ].
f4
= 2(xy 3 + yz 3 + zx3 ),
f6
=
f14 =
f21 =
1
216
1
144
1
28
Det(Hes(f4 )),
2
Det
∂ f4
∂x2
∂ 2 f4
∂y∂x
∂ 2 f4
∂z∂x
∂f6
∂x
∂ 2 f4
∂x∂y
∂ 2 f4
∂y 2
∂ 2 f4
∂z∂y
∂f6
∂y
∂ 2 f4
∂x∂z
∂ 2 f4
∂y∂z
∂ 2 f4
∂z 2
∂f6
∂z
∂f6
∂x
∂f6
∂y
∂f6
∂z
0
Det(Jac(f4 , f6 , f14 )).
,
For completeness, we give f6 , f14 explicitly.
f6
= 2(5z 2 x2 y 2 − z 5 x − y 5 z − x5 y),
f14 = z 14 + x14 + y 14 + 18y 7 x7 + 18y 7 z 7 + 18z 7 x7 − 126z 3x6 y 5 − 250y 4x9 z
−34y 2 z 11 x − 34z 2 x11 y + 375z 4x8 y 2 − 250z 4xy 9 + 375z 8x2 y 4
−34zx2 y 11 − 126z 5x3 y 6 − 250z 9x4 y + 375z 2x4 y 8 − 126z 6x5 y 3 .
f21 factors as a product of linear terms over Q(ζ7 ). In fact f21 has as linear factors:
x − y(1 + ζ75 + ζ76 ) + z(ζ73 + ζ75 ) and its 5 conjugates, x − y(ζ7 + ζ74 + ζ75 ) + z(ζ7 + ζ76 )
and its 5 conjugates, x − y(ζ73 + ζ74 + ζ75 ) − z(ζ74 + ζ76 ) and its 5 conjugates, and
x − y(1 + ζ72 + ζ75 ) + z(ζ72 + ζ75 ) and its 2 conjugates.
There is one relation between the fi :
2
3
2 2
f21
= 4f14
− 8f14 f47 − 44f14
f4 f6 − 8f49 f6 + 68f14 f44 f62
+172f46f63 + 126f14f4 f64 − 938f43 f65 + 54f67
According to [Web96], we have the following table of points in P2C , fixed by some
subgroup of G168 (for details, see the A5 -case):
H
C2
C3
C4
C7
# pts.
21 ∞
28 56
21 42
8
24
There are 21 lines with stabilizer C2 . To be precise, each point which is on precisely
one line is fixed by a group C2 , and each line as a whole is invariant under a group
C2 × C2 .
For Z a G168 -invariant curve of degree d, the covering Z → Z/G168 can have
ramification indices in {2, 3, 4, 7}. For a non-singular curve Z such that the quotient
has genus 0, the Hurwitz formula writes:
d2 − 3d + 336 = 84n2 + 112n3 + 126n4 + 144n7.
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
M. BERKENBOSCH
36
By calculating the number of ramification points, we find n3 , n4 , n7 ∈ {0, 1}, and
n2 ≤ d4 . This gives the following possibilities for d, n2 , n3 , n4 , n7 :
d n2
4
1
6
1
14 3
18 4
20 5
n3
1
0
1
0
1
n4
0
1
1
1
0
n7
1
1
0
1
1
There are infinitely many G168 -invariant non-singular irreducible curves Z in P2C ,
with Z/G168 ∼
= P1C . They are given by the irreducible polynomials in the set
3
{f4 , f6 , f14 , λf6 + f14 f4 , λf45 + f14 f6 |λ ∈ C∗ }.
Example 3.10. — We will give here explicit standard operators corresponding to some
of the Gp -invariant irreducible curves Z (with Z/Gp ∼
= P1C ) described above. We will
give the calculation for the case G = G168 , Z = Z(f6 ), but the method can be
applied to the A5 -case, and to arbitrary Z of the above form. Independent from
the author, Mark van Hoeij also calculated such operators. For his method, see
http://www.math.fsu.edu/~hoeij/files/G168/.
We have that C(Z) = Quo(C[x, y, z]/f6 )((0)) , i.e., the quotients of homogeneous elements in C[x, y, z]/f6 of the same degree, where we use the grading on C[x, y, z]/f6 induced by the one on C[x, y, z]. We will now calculate
C(Z)G .
Obviously Quo(C[x, y, z]/f6 )G = Quo((C[x, y, z]/f6 )G ) which equals
Quo(C[f4 , f14 , f21 ]), where we consider C[f4 , f14 , f21 ] as a subring of C[x, y, z]/f6 .
2
So C(Z)G = Quo(C[f4 , f14 , f21 ])((0)) , and since f21
equals some polynomial in f4 , f14
G
modulo f6 , we find C(Z) = Quo(C[f4 , f14 ])((0)) . So we can write C(Z)G = C(t),
with t :=
f47
2 .
f14
f5
4
Let V1 := hx, y, ziC , then V := f21
V1 ⊂ C(Z) is a G-invariant vector space,
and C(Z) is generated as algebra by the elements of V . We want to calculate the
corresponding differential operator. For this we write C(Z) as Quo(C[u, v]/g6 ), where
g45
g7
. The differential equation
gi := fi (u, v, 1). Then t = g24 , and we write f := g21
14
corresponding to V is the determinant of the wronskian matrix W (Y, f u, f v, f ) (see
[vdPS03, Definition 1.11]). This equation can be calculated in terms of u, v using
∂u
∂t ∂h
∂h ∂t ∂h
∂t ∂h −1 ∂v
∂t ∂h −1
, ∂t = ∂h
, where h := g6 . If we divide
∂t = ∂v ∂u ∂v − ∂v ∂u
∂u ∂v ∂u − ∂u ∂v
by the coefficient of Y 000 , we get an equation L with coefficients in C(Z)G = C(t).
From our calculations, we get the coefficients of L as rational expressions in u, v.
We can find the corresponding rational function in t as follows. Let c ∈ C(Z)G
be an expression in u, v. We can write c = r(t) for some rational function r. Let
(ui )ni=1 , ui ∈ C be some tuple of elements of C, and let (vi )ni=1 , vi ∈ C be a tuple
with the property that h(ui , vi ) = 0, i = 1 · · · n. Then c(ui , vi ) = r(t(ui , vi )), so we
SÉMINAIRES & CONGRÈS 13
PULLBACKS OF DIFFERENTIAL EQUATIONS
37
have an n-tuple ((t(ui , vi ), c(ui , vi ))ni=1 of points on the graph of r. If we know that
r has degree m with n ≥ 2m + 1, then r is determined by these points, and can be
easily calculated.
Returning to our example, let c be some coefficient of L. We can make some
heuristic guess for the degree of c. Using floating point approximations for the vi we
get a good approximation of the coefficients of r (which are unique if we take the
denominator to be monic). Rounding gives a sophisticated guess for r, which can
g7 then be rigorously checked by verifying that r g24 ≡ c mod g6 .
14
This method leads to the following standard operator, where we applied some
möbius transformation to t and a shift in order to get a nicer formula (note that a
shift does not change the projective differential Galois group).
∂3 +
3(5t − 3) 2
3(67t − 14)
57
∂ +
∂−
2
4t(t − 1)
112t (t − 1)
21952t2(t − 1)
In [vdPU00, 8.2.1 (2)] we find the operator (up to an automorphism of Q(t)[∂])
137t − 14
27
13t − 7 2
∂ +
∂−
∂3 +
2
4t(t − 1)
112t (t − 1)
21952t2(t − 1)
which also corresponds to f6 , so it must be a pullback of the previous operator.
Similar calculations lead to the operator with projective differential Galois group
A5 corresponding to the invariant f6
∂3 +
14t3 + 17325t2 + 6824280t + 945465625 2
∂
2t(t3 + 1575t2 + 853035t + 189093125)
32t3 + 28720t2 + 7040545t + 370622525
+ 2 3
∂
4t (t + 1575t2 + 853035t + 189093125)
40885(2t − 185)
.
− 3 3
8t (t + 1575t2 + 853035t + 189093125)
This equation does not appear in [vdPU00], since it has four singular points.
References
[BD79]
F. Baldassarri & B. Dwork – On second order linear differential equations
with algebraic solutions, Amer. J. Math. 101 (1979), no. 1, p. 42–76.
[Ben96] D. J. Benson – Polynomial invariants of finite groups, London Mathematical
Society Lecture Notes Series 190 (1996), p. 100–101.
[Ber04]
M. Berkenbosch – Algorithms and Moduli Spaces for Differential Equations,
PhD thesis, Groningen, 2004.
[GH00]
P. Gaudry & R. Harley – Counting points on hyperelliptic curves over finite
fields, in Algorithmic number theory (Leiden, 2000), Lecture Notes in Comput.
Sci., vol. 1838, Springer, Berlin, 2000, p. 313–332.
[HvdP95] P. A. Hendriks & M. van der Put – Galois action on solutions of a differential
equation, J. Symbolic Comput. 19 (1995), no. 6, p. 559–576.
[Kap76] I. Kaplansky – An introduction to differential algebra, Hermann, Paris, 1976.
SOCIÉTÉ MATHÉMATIQUE DE FRANCE 2006
38
M. BERKENBOSCH
[Kov86]
J. J. Kovacic – An algorithm for solving second order linear homogeneous differential equations, J. Symbolic Comput. 2 (1986), no. 1, p. 3–43.
[SU93]
M. F. Singer & F. Ulmer – Galois groups of second and third order linear
differential equations, J. Symbolic Comput. 16 (1993), no. 1, p. 9–36.
[Tat97]
J. Tate – Finite flat group schemes, in Modular forms and Fermat’s last theorem
(Boston, MA, 1995), Springer, New York, 1997, p. 121–154.
[vdPS03] M. van der Put & M. F. Singer – Galois theory of linear differential equations, Grundlehren der Mathematischen Wissenschaften [Fundamental Principles
of Mathematical Sciences], vol. 328, Springer-Verlag, Berlin, 2003.
[vdPU00] M. van der Put & F. Ulmer – Differential equations and finite groups, J.
Algebra 226 (2000), no. 2, p. 920–966.
[Web96] H. Weber – Lehrbuch der Algebra, vol. II, Chelsea Publishing Company, New
York, 1896.
[Wei]
J.-A. Weil – Recent Algorithms for Solving Second-Order Differential, summary
by Michele Loday-Richaud. INRIA researchreport #5003. Algorithms seminar
2001-2002, http://algo.inria.fr/seminars/sem01-02/weil.pdf.
M. Berkenbosch, Department of Mathematics, University of Groningen, P.O.Box 800, 9700 AV
Groningen, The Netherlands • E-mail : maint@math.rug.nl
SÉMINAIRES & CONGRÈS 13