Surface Reconstruction from Intensity Image using Illumination Model based Morphable Modeling
advertisement

Surface Reconstruction from Intensity Image
using Illumination Model based
Morphable Modeling
Paper ID: 20
Paper ID: 20
Abstract. We present a new method for reconstructing depth of a
known object from a single still image using deformed underneath sign
matrix of a similar object. Existing Shape from Shading(SFS) methods
try to establish a relationship between intensity values of a still image and
surface normal of corresponding depth, but most of them resort to error
minimization based approaches. Given the fact that these reconstruction approaches are fundamentally ill-posed, they have limited successes
for surfaces like a human face. Photometric Stereo (PS) or Shape from
Motion (SfM) based methods extend SFS by adding additional information/constraints about the target. Our goal is identical to SFS, however,
we tackle the problem by building a relationship between gradient of
depth and intensity value at the corresponding location of the same object. This formula is simplified and approximated for handing different
materials, lighting conditions and, the underneath sign matrix is also obtained by resizing/deforming Region of Interest(ROI) with respect to its
counterpart of a similar object. The target object is then reconstructed
from its still image. In addition to the process, delicate details of the
surface is also rebuilt using a Gabor Wavelet Network(GWN) on different ROIs. Finally, for merging the patches together, a Self-Organizing
Maps(SOM) based method is used to retrieve and smooth boundary
parts of ROIs. Compared with state of art SFS based methods, the proposed method yields promising results on both widely used benchmark
datasets and images in the wild.
Keywords: 3D surfaces, depth reconstruction, SFS, morphable modeling, surface deforming, human perception.
1
Introduction
We focus on the problem of reconstructing depth of an object from a single
intensity image. The problem has direct relevance to many applications such as
medical imaging, enhanced face recognition, 3D printing, and towards answering
the long standing question of understanding human depth perception.
Humans have a remarkable capability to perceive the 3D shape by looking
at a 2D monocular image. Enabling computer vision systems to do the same
2
Paper ID: 20
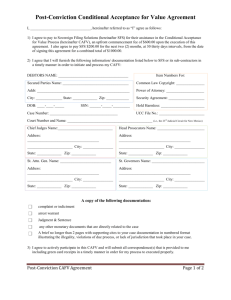
Fig. 1: The input data and generated data. From left to right: input raw sensor range
data; input target image; output reconstructed 3D surface.
still remains a challenging task. The exact problem, as formulated as early as
in 1970 [7], to obtain the shape of a smooth opaque object from a single view,
is called shape-from-shading problem. Significant research has been done in this
area over the past four decades with varying levels of success [12]. The classical
SFS problem is typically solved under assumptions such as single point light
source, constant albedo, and Lambertian reflectance. However, such methods,
while performing well on simple some images like a vase, have limited success for
complex images, such as a bust[11] . The key challenge faced by these methods
is that ambiguity needs to be solved is fundamentally ill-posed, i.e., for the given
intensity there could be multiple valid surfaces [12, 13, 16, 17].
There have been recent advances to resolve the ambiguity. However, most
methods either seek additional images corresponding to the target image (e.g.,
photometric stereo (PS) [18, 19], multiple images or Structure from Motion [20,
22]) or require knowledge of the context, such as the illumination model [11].
Such methods start from a known reference 3D surface shape and then establish
point correspondence between the reference shape and the input image. To reach
an acceptable solution, constraints are applied. Recently, the work by Barron and
Malik [8, 10] has made advances in the field of intrinsic image model and SFS by
simultaneously extracting multiple aspects of an image, including shape, albedo,
and illumination from a single intensity image.
In this paper, we are trying to solve the same problem without using any
additional context based constraints and knowing depth information of target
object, instead, we propose a new method based on illumination model and
an object similar to the target. The illumination model establish a relationship
between gradient at each point and its corresponding intensity value. The input
raw data, still image and generated data of our method are shown in Fig 1.
1.1
workflow
As the workflow shown in Fig. 2, our approach has 5 steps. In step 1, we identify
ROIs from both reference depth and target image in the following manner: first,
we identify keypoints in reference depth by finding local maximum/minimum
Title Suppressed Due to Excessive Length
Target Image
Reference Depth
Step 1: Selection of
Key-Points / Regions
Target Image
3
Reference Depth
Step 2: Matching of
corresponding ROIs to
obtain underneath sign
matrix (Section 2.3)
Step 3: Reconstruction
using illumination model
(Section 2.1, 2.2)
Step 4: GWN based
details reconstruction
(Section 3)
Step 5: SOM based
boundaries smoothing
(Section 4)
output surface
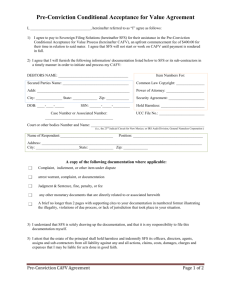
Fig. 2: Overview of Proposed Tasks. The inputs to the reconstruction algorithm are the
target image, a reference depth. The algorithm expects general correspondence between
the the target and reference images. Mathematically, the correspondence should be such
that the depth-intensity relationship for the reference object is the same as that of the
target object(we shall explain the relationship using a formula and a sign matrix in
Section 2). For practical purposes, given the target object, we choose a much similar
reference object.
∂z
∂z
= 0 and ∂y
= 0 (usually we select the region around local maximum
where ∂x
where local minimum determine boundaries). next, we determine corresponding
ROIs in target image manually( in the Section 2.2, we will be introducing a semiautomated way doing this). In step 2, the ROIs of reference depth is resized to
match the size of its counter parts of target image. In step 3, we could build a
sign matrix (along x or y axis, 1,0,-1 indicate the slope of depth is growing up,
non-changed, down, respectively, e.g. we can decide the sign of the first row and
then the sign of columns below that row). In step 3, the depth of target image
is reconstructed. In step 4, for recovering details of target image, a GWN based
method is used. In the final step, a SOM based method is used to retrieve and
smooth boundaries of ROIs.
4
Paper ID: 20
Line of sight
Line of sight
θ
Luminous Intensity
I = Imax cos θ
n̂
Camera
2α
n̂max
Target Surface x
2α
θ
n̂
ẑ
xmax
2α
Target Surface
α−β
x
β
x̂
(B)
(A)
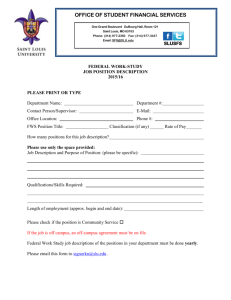
Fig. 3: Illumination model used in this paper. In figure (A), from observer or camera’s
perspective, the angle θ is eitherpositive(clockwise), or negative(couter-clockwise),
which gives us |θ| = arccos
Ix
. At the bottom
Imax
∂z
= tan (α − β) is the
∂x
of figure (B), there is a cartesian
coordinate system, where
surface gradient of normal n̂ at
=
tan
(α
−
β
+
β)
=
tan
(α) is the surface gradient of
surface point x, and ∂x∂z
max
normal n̂max at surface point xmax . As shown in figure (B), at point xmax , the light is
reflected along the light of sight, i.e, positive ẑ direction, and we assume the observer
receives the maximum intensity Imax according to refx. From the origin of the cartesian
coordinate system, normal n̂ can be viewed as rotation of the normal n̂max counterclockwise of angle β. The key idea here is we need to calculate θ using α and β. Notice
the normal n̂max bisects the incoming(incident) light and outgoing(reflected) light ray
at the point xmax , and therefore, at the point x, the angle between normal n̂ and
incoming light ray is 2α − (α − β) = α + β. That is to say, the angle between incoming
light and outgoing light at point xmax is 2(α+β). So in the end, θ = 2(α+β)−2α = 2β.
2
2.1
3D Reconstruction Method
Basic Illumination Model
To make our work easier to be comprehended, we will to address the idea before
giving any formula. Mathematically, in two dimensional euclidean space, say z
∆z
and x are axis orthogonal to each other, as long as the gradient ∆x
is known,
the depth z any any point could be integrated from a known point xstart . In
other words, if we regard the space is discrete, and step-wise ∆z (with respect
to equal-length step ∆x) could be inferred or calculated at every point, then the
summation of ∆z from starting point xstart to ending point xend along the path
of summation, i.e., Σ∆zi , is the relative height zend − zstart .
Therefore, the problem, in our case, is to find the relationship between partial
∂z
∂z
(or ∂y
), of given point (x, y), with respect to the intensity value Ixy
gradient ∂x
Title Suppressed Due to Excessive Length
Tangent of argument in radians
5
Inverse cosine in radians
100
3.5
80
3
60
40
2.5
20
2
0
1.5
−20
−40
1
−60
0.5
−80
−100
−2
−1.5
−1
−0.5
0
0.5
1
1.5
0
−1
2
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Fig. 4: Tangent and Inverse Cosine Functions.
at the point:
∂z
= fx (Ixy )
∂x
or
∂z
= fy (Ixy )
∂y
(1)
This is much the same formula as stated in the traditional SFS problem:
I(x) = s(n(x)), where the n(x) is the normal vector of the location vector x.
As shown in Fig. 3, the luminance, or often called brightness, from the observer’s perspective, or line of sight, can be represented as the luminous intensity
per projected area normal to the line of observation [6] (notice in Fig. 3(B), we
assume that a single light source is located at infinity such that light falls on each
point of the surface from the same direction). To be more accurate, the angle between line of sight and incoming light ray, i.e., θ, at point x, can be inferred by the
angle between normal of x, i.e. n̂ and normal of maximum intensity valuereceived
Ix
.
by observer, i.e., n̂max , which gives us θ = 2β, or β = 21 θ = ∓ 21 arccos Imax
We notice here the gradient of surface point x has exact the same angle as
∂z
tan (α − β), or in other words, ∂x
= tan (α − β). Put above formulas together,
we have:
∂z
1
Ix
= tan (α − β) = tan α ± arccos
(2)
∂x
2
Imax
2.2
Handling Issues caused by Lighting Condition and Material
Of course, it would be straight forward to think of implementing the formula (2)
directly, and that will lead to 2-dimensional integration. However, the formula
only works well in ideal conditions, and for the image in the wild, shading, especially material of surface will play important roles in the surface reconstruction.
Therefore, we introduce an approximation of above formula, and an offset factor,
to counterbalance the non-ideal situations.
We consider firstly of the linear attribute of arccos and tan functions. See
Fig. 4, most values for both Inverse Cosine function and Tangent function, in
6
Paper ID: 20
their domain of definition, can be approximated using linear relation. Thus, we
make following approximation: tan(x) = k1 x + b1 and arccos(x) = k2 x + b2
(from Fig. 4, we can see the values k1 ,k2 ,b1 and b2 are constant values). Instead
of using continuous fashion of expression, we would use discrete manner of partial
derivative for the purpose of digital computation. Therefore the formula (2) can
be rewritten as:
1
I
∆z
= k1 α ±
k2
+ b2
+ b1
∆x
2
Imax
(3)
As discussed, issues caused by lighting condition, different materials, impose
an offset value for intensity values received by observer/camera. The offset, we
empirically assume it has constant value bof f set . Moreover, the choice of this
value is affected when taking color model into account. Conversion of a color
image to grayscale is not a unique process: weight on different channels affect
the output grayscale. Usually we prefer to use the principles of photometry to
match the luminance of the grayscale image to the luminance of the original color
image(in reality, RGB model has different weight combination as compared with
YUV model). Since this is not the topic of this paper, we would stop here and
we refer reader to read document [14]. Simplified from above formula, we have:
∆z
= ±(k · I + b) + b0 + bof f set = ±(k · I + b) + b̃
∆x
Because we do not know the sign before the quantity
1
2
arccos
(4)
Ix
Imax
in (2),
we cannot find the exact expression for the gradient. Let ρ(x) ∈ {−1, +1} be a
binary indicator function which indicates the direction of the gradient. If ρ(x) is
known, we get:
∆z
= ρ(x)(k · I + b) + b̃
(5)
∆x
Using the formula 5, we can determine candidate local maximum/minimum
∆z
∆z
points from target image by letting ∆x
= 0 and ∆y
= 0, then manually prune
unnecessary points. Given the gradient in (5), we can reconstruct the relative
depth for the xstart and xend as:
z=
xX
end
h
i
ρ(x)(k · Ix + b) + b̃ ∆x
(6)
xstart
We did an interesting experiment using formula (6) to demonstrate our ideas.
As shown in Fig. 5, we assume the color of sky(dark blue), pyramid(light yellow),
and face(misty rose), and empirically select bof f set for them(in our case, these
values are -112, -201, -212 respectively and, the numbers are represented in
signed 16-bit integer fashion). Given the same the sign function at the bottom
row, the step-wise ∆z is calculated(the third row) and the summation(the fourth
row) proves the reconstructed depth is correct(fourth row). In this experiment,
Title Suppressed Due to Excessive Length
Sampling from Sky
7
Sampling from Mozart
Sampling from Pyramid
+1
+1
+1
0
0
0
−1
−1
−1
Fig. 5: An experiment to prove the approximated illumination model. The first row:
input images;the second row: a slice of intensity values sampled from images above;
the third row: recovered absolute value of ∆z using formula (5); the fourth row: reconstructed depth; the fifth row: underneath sign vector. Notice all these 3 experiments
use the same sign vector.
the calculated ∆z for sky is always 0, and so, no matter what sign function is,
the depth will be summed up to 0. But we can see that the ∆z for pyramid and
mozart’s face take on different values, and without alignment of sign function
below, the depth could not be reconstructed correctly. Therefore in our method,
8
Paper ID: 20
Hemisphere
Deformed Hemisphere
Reconstructed Surface from Image
Ground Truth
Fig. 6: Reconstructed surface using sign matrix from a deformed hemisphere. From
left to right: original hemisphere, deformed hemisphere, reconstructed depth from a
still image on its up-right corner(within pink color circle); ground truth of the depth in
the pink color circle. Notice here, the summation sequence start from centerline, and
then to both sides.
the purpose of resizing similar object’s ROIs, is to obtain correct alignment of
the sign matrix/function.
2.3
Reconstruction using Sign Matrix
Finally we consider double summation over more general regions. Suppose that
the region R is defined by G1 (x) 6 y 6 G2 (x) with a 6 x 6 b. This is called a
vertically simple region. The double summation is given by
z=
xX
2 (x) h
end G
X
ρxy (kx · Ixy + bx ) + b̃x
ih
i
ρxy (ky · Ixy + by ) + b̃y ∆x∆y
xstart G1 (x)
=
xX
end
xstart
h
G2 (x) h
i
i
X
ρxy (kx · Ixy + bx ) + b̃x ∆x
ρxy (ky · Ixy + by ) + b̃y ∆y
(7)
G1 (x)
As shown in formula (7), recovering the shape of object is still determined by
the two important factors: one is the underneath sign matrix, the other is intensity values. Of course, the offset plays an import role here too. This introduce an
interesting topic: The sign matrix ρxy could be easily obtained by deforming a
similar object’s surface, i.e., by deforming an existing object, not only the depth
of the morphable object at each location is changed, but also the underneath
sign matrix is changed.
Now we do another experiment to prove our idea. Take Fig. 6 as an example.
Here we have a hemisphere, and our target is to reconstruct target object using
its still image. The first step is to estimate underneath sign matrix. It can be seen
in the Fig. 6, by deforming surface of a hemisphere, the sign matrix is obtained
exactly the same as that of the ground truth. Next, using formula (7), we are
Title Suppressed Due to Excessive Length
9
able to recover the surface from the intensity values within the pink circle. The
result is pretty similar to the shape of ground truth, which confirm proposed
idea and the approximation are correct.
3
Reconstruction of Surface Details
Since deformed shape keep original features of reference object, the details of
target object needs to be reconstructed too. In terms of imposing details, traditional SFS can perform well. Here we adopt a strategy using a GWN, which will
keep the details of target image and not disturb the rough surface.
Proposed method take all ROIs as a whole, and minimize errors in batch
manner:
Ki
Ki
N
X
X
X
||Ii −
[s, θ, w] = arg min
wij ψi ||22 + β
|wij |
(8)
s,θ,w
i=1
j=1
j=1
θ and s orientation factor and scale factor of Gabor wavelets, wij and ψij the
jth coefficient and its corresponding wavelet on ith P
ROI respectively. In order to
Ki
prevent over-fitting, we add a regularization term β j=1
|wij |. Here β is penalty
factor for the L1 norm of vector [wi1 , ..., wiKi ].
4
Self-Organizing Maps
Before merging different ROIs, their boundaries are usually rough and a smoothing process is required. Instead of finding out a smoothing strategy, here we
propose a depth retrieval method using existing surface boundary parts. This
issue has been addressed by an interesting recent paper [23], where input depth
is divided into five facial parts via the alignment, and each facial part is matched
independently to the dataset resulting in five high-resolution meshes. They use
azimuth angle and elevation angle for measuring the similarity between two
patches. Our method make stored depth “learn” target boundaries and therefore the best match are gradually smoothed by learning two boundaries. The
depth patches comes from public dataset [2, 4].
Traditionally, there are two operational modes for a SOM, training and mapping. During training, the learning example is compared to the weight vectors
associated with each neuron and the closest winning neuron is selected. The
weights of all the neurons are then updated using the following update equation:
ωk (t + 1) = ωk (t) + α(t)η(ν, k, t)||ωk (t) − x||2
(9)
Here ωk (t) is the weight for the k th neuron at tth iteration, x is the input vector, and ν is the index of the winning neuron. α() gives the learning rate which
monotonically decreases with is t. A neighborhood function which measures the
distance between a given neuron and the winning neuron. Typically, η takes a
10
Paper ID: 20
∆
ν,k
Gaussian form, η(ν, k, t) = 2σ(t)
2 , where ∆(, ) is the distance between two neurons on the grid, and σ is the monotonically decreasing neighborhood width. The
SOM algorithm assumes that the input vectors are semantically homogeneous.
In our case, we attach the stored depth map of boundary parts at each neuron.
During the training, in each round, the errors between two adjacent ROIs w.r.t.
the boundary part are calculated, and the winning neuron should have the least
errors.
We summarize the idea in Algorithm 1.
Input : Adjacent Patch R, Adjacent PatchR̄, Number of rounds n.
Output: Patch Nî,ĵ .
1
2
3
4
5
6
7
8
9
10
11
12
13
Initialize 2-dimensional matrix N of size a × b with stored depth of the same
type of patches;
Initialize set of training set S = {R, R̄};
for c ← 1 to n do
for k ← 1 to 2 do
Find winning neuron ν = Nî,ĵ for Sk using formula (9);
for i ← 1 to a do
for j ← 1 to b do
Update Nij w.r.t. ν and Sk ;
end
end
end
Finding final winning neuron Nî,ĵ ;
end
Algorithm 1: Parallel SOM Algorithm
5
Experiments
In order to demonstrate robustness of our method, we test our method on both
benchmark data and images in the wild.
5.1
Benchmark Datasets
The first set of evaluation was conducted on a public dataset of RGB and depth
images of objects [1, 3, 5].
In Fig. 7, we show comparison of our method with enhanced SFS in terms
of depth errors. For all three benchmark objects, our method can achieve better reconstruction result compared with enhanced SFS on average. This phenomenon comes majorly from the fact that our result is calculated using an integration/summation process, which leads to a fair accurate output as a whole.
Instead, traditional SFS-based method focus on local ambiguity, even in natural
Title Suppressed Due to Excessive Length
Ground Truth
Our Result
Enhanced SFS
11
Color-coded Depth Error
Our Result
Enhanced SFS
11cm
7cm
3cm
2,500µm
1,500µm
500µm
2,000µm
1,250µm
500µm
Fig. 7: A comparison in terms of depth errors between our method and enhanced
SFS(best viewed in color).
lighting environment, reconstructed surface converges to the value of gray-scale
or intensity values. Some SFS based methods will inevitably converge to global
minimum/maximum if their models are fundamentally convex or concave. Take
MPI vase for example( the first row in Fig. 7), the boundary part are successfully
reconstructed and perform better than our method, however, for the bulge part
of this vase, the enhanced SFS simply did not recover the depth, compared with
ground truth and, the error amounts to around 14cm to 15cm.
The next set of experiments are performed on benchmark[5] for comparing
normal errors among traditional SFS, enhanced SFS and our method. We maintain the similar lighting condition as [11]( see leftmost figure of Mozart in the
first row of Fig. 8 ). It can be seen that traditional SFS-based method converges
to local intensity values, which give effect of “deep trench”, while enhanced SFS
overcome the the problem by adding natural illumination constraints. In our
case, however, the depth information comes from accumulation of a portion of
intensity, and therefore, the rough normal error is minimized. Moreover, using
Gabor wavelet makes sure mean value and covariance are allocated along the
direction to minimize error of reconstruction. This gives our method advantages
over both traditional and enhanced SFS methods.
Then we numerically compare our method to three state of art methods: traditional SFS [15], PS, and the recent SAIFS method [10]1 on Stanford benchmark [3]. Result is shown in Table 1. The proposed method outperforms both
SFS and SAIFS on all three benchmark images by a factor of 2 or 3. The average
performance is even better than PS which shows while our method performs on
heavily shaded regions, but in other areas it is able to reconstruct the depth
effectively.
1
http://www.cs.berkeley.edu/~barron/SIRFS_release1.5.zip
12
Paper ID: 20
Ground Truth
SFS [Tsai and
Shah, 1994]
Enhanced SFS [Johnson
and Adelson, 2011]
Ours
80◦
50◦
20◦
Fig. 8: A comparison in terms of normal errors among our method, traditional SFS and
enhanced SFS(best viewed in color). The first row: target image(leftmost column) and
reconstructed surface; the second row: normal map of target surface and reconstructed
surface; the third row: normal error of reconstructed surface.
Model Dragon Armadillo Buddha
SFS
962.4
1067.4
1251.7
SAIFS 1915.6 2217.1
2405.2
PS
492.7
515.3
603.1
Ours
417.1 497.5
542.9
Table 1: Comparison of average reconstruction error of proposed method and existing
methods. Error is measured in µm.
5.2
Images in the Wild
We especially wish to see how our method can handle the issue of shading and
natural lighting condition, as well as the problems caused by different materials.
We select images of famous people from internet. Take Fig. 9 for example, eye
brow, mustache hair take different “color” compared with regular skin. What is
more, the lighting condition is natural such that our assumption of a single source
of light does not hold too. The results are shown in Fig. 9. This result is especially
interesting in the sense, as long as the corresponding underneath sign matrix is
similar enough to the counterpart of target, reconstructing a satisfactory surface
is possible.
Title Suppressed Due to Excessive Length
13
Fig. 9: Result of reconstruction for images in the wild.
6
Conclusions and Future Work
We have shown a depth recovery method for certain object from a still image
by deforming the underneath sign matrix of a similar object. The algorithm
handles reflectance problem from different material or lighting condition very
well by applying an approximated formula of the proposed illumination model,
which is a major contribution of our work. In terms of recovery, unlike PS based
methods, given the fact that very little depth knowledge is known of target, our
method can effectively reconstruct complex surface like face. For each ROI on
target image, the details of the surface is recovered using GWN. To merge the
different ROIs, a SOM based method is used to retrieve and smooth boundary
parts of ROIs. The current ROIs are manually selected according to the number
of local maximum points, so in the future, we would like to explore an automatic
way for finding regions.
References
1. MPI-Inf 3d data, http://gvv.mpi-inf.mpg.de/files/
2. VAP dataset, http://www.vap.aau.dk/rgb-d-face-database/
3. The Stanford 3d scanning repository, http://graphics.stanford.edu/data/
3Dscanrep/
4. Thingiverse, http://www.thingiverse.com/
5. UCF shape database, http://www.cs.ucf.edu/~vision/
6. RCA: RCA Electro-Optics Handbook, pp. 18–19, RCA/Commercial Engineering in
Harrison, N.J (1974).
7. Horn,B. K. :Shape from shading. Doctoral Thesis, Cambridge, MA, USA (1970).
8. Barron, J. T., Malik,J. : High-frequency shape and albedo from shading using natural image statistics. In: Proceedings of the 2011 IEEE Conference on Computer
Vision and Pattern Recognition(CVPR), pp. 2521– 2528 (2011).
14
Paper ID: 20
9. Horn,B. K. , Brooks, M. J.: The variational approach to shape from shading. Comput. Vision Graph. Image Process, vol. 33, pp. 174–208 (1986).
10. Barron, J. T., Malik,J. : Shape, albedo, and illumination from a single image of an
unknown object. In: Proceedings of the 2012 IEEE Conference on Computer Vision
and Pattern Recognition(CVPR), pp. 334–341, (2012).
11. Johnson, M. K., Adelson, E. H.: Shape estimation in natural illumination. In:
Proceedings of the 2011 IEEE Conference on Computer Vision and Pattern Recognition(CVPR), pp. 2553–2560 (2011).
12. Zhang, R. and Tsai, P.-S. and Cryer, J. E. and Shah, M.: Shape from shading: A
survey. IEEE Trans. PAMI, vol: 21, pp. 690–706 (1999).
13. Lee, K. M. and Kuo, C. C. J.: Shape from shading with a linear triangular element
surface model. IEEE Trans. PAMI, vol: 15, pp. 815–822 (1993).
14. Volz, H.G.: Industrial Color Testing: Fundamentals and Techniques. Wiley-VCH,
ISBN 3-527-30436-3(2001).
15. Tsai, P.-S., Shah, M.: Shape from shading using linear approximation. Image and
Vision Computing, vol:12, pp. 487–498(1994).
16. R. Kozera: Uniqueness in shape from shading revisited. J. Math. Imaging Vis.,
vol:7, pp.123–138(1997).
17. J. Oiliness: Existence and uniqueness in shape from shading. In: Pattern Recognition, 1990. Proceedings., 10th International Conference on, vol.1, pp. 341–345(1990).
18. R. J. Woodham: Photometric method for determining surface orientation from
multiple images. Optical Engineering, vol:19, pp.139–144(1980).
19. Wu, C.L., Wilburn, B., Matsushita, Y., Theobalt, C.: High-quality shape from
multi-view stereo and shading under general illumination. In: Proceedings of the
2011 IEEE Conference on Computer Vision and Pattern Recognition, pp. 969–
976(2011).
20. Bregler, C., Hertzmann, A., Biermann H.: Recovering non-rigid 3d shape from
image streams. In: CVPR, vol: 2, pp. 690–696, IEEE Computer Society(2000).
21. Rusinkiewicz, S., Hall-Holt, O., Levoy, M.: Real-time 3d model acquisition. ACM
Trans. Graph., vol: 21:438–446 (2002).
22. Garg, R., Roussos,A., de Agapito, L.: Dense variational reconstruction of non-rigid
surfaces from monocular video, In: IEEE CVPR, pp. 1272–1279(2013).
23. Liang, S., Kemelmacher-Shlizerman, I., Shapiro, L. G.: 3D Face Hallucination from
a Single Depth Frame. In: International Conf. on 3D Vision (3DV), Tokyo(2014).