Document 10658012
advertisement

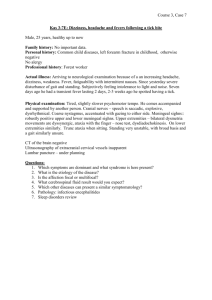
294 IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING , VOL. 11, NO. 3, SEPTEMBER 2003 Multidimensional EMG-Based Assessment of Walking Dynamics Ben H. Jansen, Senior Member, IEEE, Vonda H. Miller, Demetrios C. Mavrofrides, and Caroline W. Stegink Jansen Abstract—The electromyogram (EMG) provides a measure of a muscle’s involvement in the execution of a motor task. Successful completion of an activity, such as walking, depends on the efficient motor control of a group of muscles. In this paper, we present a method to quantify the intricate phasing and activation levels of a group of muscles during gait. At the core of our method is a multidimensional representation of the EMG activity observed during a single stride. This representation is referred to as a “trajectory.” A hierarchical clustering procedure is used to identify representative classes of muscle activity patterns. The relative frequencies with which these motor patterns occur during a session (i.e., a series of consecutive strides) are expressed as histograms. Changes in walking strategy will be reflected as changes in the relative frequency with which specific gait patterns occur. This method was evaluated using EMG data obtained during walking on a level and a moderately-inclined treadmill. It was found that the histogram changes due to artificially altered gait are significantly larger than the changes due to normal day-to-day variability. Index Terms—Gait analysis, hierarchical clustering, multichannel electromyogram (EMG) analysis, trajectory analysis. I. INTRODUCTION E LECTROMYOGRAPHY (EMG) provides a record of the electrical activity generated by contracting muscles during movement activities. Dynamic EMG analysis is routinely used to assess muscle function during gait [1]. Of primary interest are the onset, duration, and amplitude of the phases of activity of the leg muscles during a stride. A variety of procedures have been developed to measure these features, including threshold-based methods [7] and functional approximation methods [2], [10]. Most approaches start from the linear envelope (LE), which is obtained by full-wave rectification and lowpass filtering of the EMG. LEs are often ensemble-averaged over multiple strides to reduce the variability. Various methods have been used to analyze the LE, including Fourier series [15], Karhunen–Loeve expansion [14], factor analysis [9], and correlation measures [6]. Pattern recognition methods, operating on the aforementioned features, have been used to quantify changes in gait patterns. Examples include the use of clustering techniques [15] and neural networks [12]. Manuscript received May 4, 2001; revised April 16, 2002. B. H. Jansen and V. H. Miller are with the Department of Electrical and Computer Engineering, University of Houston, Houston, TX 77204-4005 USA (e-mail: bjansen@uh.edu). D. C. Mavrofrides was with the Department of Electrical and Computer Engineering, University of Houston, Houston, TX 77204-4005 USA. He is currently with Sensorwise Inc., Houston,TX 77042-4119 USA. C. W. Stegink Jansen is with the Department of Physical Therapy, School of Allied Health Sciences, University of Texas Medical Branch, Galveston, TX 77555-1144 USA. Digital Object Identifier 10.1109/TNSRE.2003.816865 Techniques for the objective, quantitative assessment of changes in movement patterns leave much to be desired because they do not include analysis of the coordinated activity of a group of muscles. Even when multiple channels are recorded simultaneously, each channel is usually analyzed one at a time (see, for example, [5]). As a result, the complex and intricate pattern with which the muscles contract and relax during a motor task is not quantified. True multichannel EMG analysis methods, in the sense that data from more than one EMG channel are evaluated simultaneously, are rare. One such approach was presented by Davis and Vaughan [4], who plot the activity of one muscle against another, resulting in a two-dimensional (2-D) graph. These graphs were evaluated qualitatively only, and relationships between more than two EMG channels at a time were not considered. In this paper, we present a method that provides a quantitative assessment of the phasing and activation pattern of multiple muscles at once, and on a stride-by-stride basis. This method, referred to as the Structural EMG Analysis (SEA) method, will be useful to quantify the changes in gait patterns following surgery or rehabilitation. The procedure is outlined in the next section, and results obtained from gait data are presented in Section III. A discussion concludes this paper. II. SEA METHOD The structural EMG analysis (SEA) method operates on multichannel EMG data obtained from ambulating subjects. We selected to study EMG during gait because it is quasi-periodic and can easily be separated into individual gait cycles. The latter is a prerequisite for the method. In addition, we operate on the linear envelope of the EMG data. In the present implementation, the method’s capability is limited to four simultaneously recorded EMG channels, but expansion to a larger number of channels is straightforward. The first step in the SEA method is to transform multichannel EMG recordings to trajectories for each single stride. Next, representative gait cycles—templates—that account for most of the variability in the data, are determined using a clustering algorithm. In the third stage, histograms are formed expressing the frequency of occurrence of each template in a session. These histograms provide insight in the structure of EMG activity during a repeated task, hence, the name of our method. Each of the steps that comprise the SEA method is described in detail, together with a procedure to compare histograms. Trajectory Construction: The simultaneous activity of contraction and relaxation between muscles is represented by way of trajectories in a -dimensional Euclidean space 1534-4320/03$17.00 © 2003 IEEE JANSEN et al.: MULTIDIMENSIONAL EMG-BASED ASSESSMENT OF WALKING DYNAMICS Fig. 1. Three panels on the left show the normalized linear envelope of the EMG recorded from the Biceps Femoris (BF), Tibialis Anterior (TA) and Gastrocnemius (G) during one cycle of horizontal gait (black line) and inclined gait (red line). The corresponding trajectories for BF versus TA, and TA versus G are shown in the two panels on the left. All data are from one subject. . Trajectories are constructed by placing different EMG are identified by channels along each axis so that points in , where represents sample of the EMG of muscle . Trajectories are formed from single stride data. An example is presented in Fig. 1, which shows the linear envelope of the EMG produced by the BF, G, and TA during one gait cycle, and the (2-D) trajectories obtained from plotting BF versus TA, and TA versus G. Striking differences between the BF versus TA trajectories for horizontal and inclined gait can be observed, while more subtle differences are apparent in the TA versus G trajectories. Template Formation: A clustering method was developed to group strides with similar trajectories. Central to the clustering procedure is a metric to measure the similarity between two and . A point-by-point Euclidean distance is trajectories not appropriate for capturing overall curvature and flow similarity between two trajectories. Instead, we developed the metric which involves a search along the two trajectories for regions of similar curvature and flow. This similarity measure is computed using (1) with (2) is computed by taking points on traThe similarity jectory that are samples apart, and finding the points on points on (these points trajectory that are closest to the 295 are vectors in -dimensional space). Specifically, is determined is minimized for such that . The variable defines a window on to which the search is confined. This window ensures that similar phases of two gait cycles are compared with each other. The , similarity measure is nonsymmetric, i.e., points on will have because there is no guarantee that all points on . Therefore, both been compared to all and are computed and the larger of the two serves as the measure of similarity. depends on the value of the The definition of , the number of points skipped , and window length , the number of (consecutive) points used. After extensive experimentation, reported in [8], it was found that acceptable , , and for . values are The search for templates proceeds by first identifying that gait cycle which, on average, is closest to all other gait cycles. Gait cycles that are too far from this initial template are searched again to find the next stride that is closest on average to all the other strides that were not grouped with the first template. This search method continues until all gait cycles are grouped with a particular template. The basic approach is implemented as follows. A distance is obtained by computing the similarity matrix between each pair of strides among all the sessions used for from cycle to all other training. The average distance gait cycles is computed using (3) , where is the total number of gait cycles. The smallest denoted as , is determined, and the gait cycle associated with this distance is selected as the first potential template. Cycles from the first potential template that differ no more than are removed, resulting in a smaller matrix. This process is repeated until only two gait cycles remain, and the one with the is selected as the first template. Cycles that differ largest from this template by no more than a threshold—based on the a priori mean distance of the least variable session—are removed. Again, average distances are computed for this smaller-sized distance matrix and the process is repeated until no cycles remain. An example of this template finding procedure is shown in Fig. 2. In step 1, a sample distance matrix is shown with three trajectories from two different sessions A and B along with the average distance of each trajectory to all other trajectories. In , so A2 this example, the smallest average distance is is selected along with all the trajectories that are less than 6.4 away from A2 to form the reduced distance matrix shown in step 2. This smallest average distance step is repeated on the reduced matrix as shown in step 3 and continues until a 2 2 matrix is found as shown in step 4. Of these two possible templates, the is selected. Here, one with the largest distance and , hence, A3 is selected as the first template. Then a preset threshold—based on the a priori mean of the least variable session—is used to select trajectories that are further away from the template just found by this threshold value (we 296 IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING , VOL. 11, NO. 3, SEPTEMBER 2003 Fig. 2. Example to illustrate the procedure for template selection. A1 through B3 indicate gait cycles, and the matrices show the similarity index between templates. For example, the top-left matrix shows that the similarity between A1 and A2 is 13. Numbers to the right of the matrices are row averages. During each successive step of the clustering procedure, similar gait cycles are combined, and a new similarity matrix is produced. See text for detailed explanation. used 7.0). In this example, B2 and B3 remain, from which B3 is selected by applying the aforementioned rules. Histogram Formation: Once the templates for an individual have been identified, a classification stage follows, where all the gait cycles from a session are compared to the templates using the previously described similarity (distance) measure. A count is taken of how often each template is the most similar to the gait cycles in question. In this way, we obtain a histogram for each session, expressing how frequently gait cycles resemble each template in that session. Since the number of strides may vary from session to session, we normalize each histogram by dividing by the number of strides in the session and multiplying by hundred. Histogram Comparison: Changes in gait between sessions or between level- and inclined-walking will show up as differences in these histograms. These differences are quantified using the sum of the squared differences, normalized to the number of templates, defined as (4) and are the two where is the number of templates, and histograms to be compared. A t-test can be used to determine values when comparing histograms obtained under if the values when similar gait conditions differ significantly from comparing histograms obtained during different gait conditions. III. RESULTS A. Data Collection and Preprocessing EMGs were obtained from two normal volunteers (male subject A and female subject B), who were asked to walk on a treadmill at a self-selected, constant speed. Subject A selected a speed of 2.0 miles/hour, and subject B walked at 3.2 miles/hour. Surface electrodes were used to record the EMG from the Vastus Lateralis (VL), BF, TA, and in the right leg. The electrodes were positioned according to standardized placements [11], and an oscilloscope was used to verify that activity from the intended muscle was obtained. Toe-off and heel-strike in- formation was obtained using two foot switches, placed on the outside of the heel and the head of the first metatarsal bone, respectively. Data recorded on two different days (7/25/97 and 8/1/97) for subject A and three different days (7/23/97, 7/25/97, and 8/1/97) for subject B were analyzed. Recordings were made during morning and repeated afternoon sessions on each day. During each morning and afternoon session, ten consecutive data collection runs took place. In each run, data from about 20 contiguous steps were collected once the subject had gained balance and a steady gate after stepping on the moving treadmill. The first five runs were done on a level treadmill, and the next five runs with the treadmill inclined to a 5% grade. These two conditions were chosen to induce two indisputably different gait conditions. All data were digitized at 752 Hz, and the foot switch data were used to separate the gait cycles into single strides. The four EMG channels were rectified and lowpass filtered (10-Hz cutoff) to obtain estimates of the amplitude envelope. The linear envelopes were normalized by subtracting the session mean and dividing by the session standard deviation to allow for intersession comparisons. B. Horizontal Versus Inclined Gait EMG Differences We first present results showing that the EMG patterns obtained during horizontal gait differ consistently from the EMG during inclined gait. Data from one horizontal and one inclined session, collected on 7/25 from subject A were used to find the templates. Five templates, three for horizontal and two for inclined gait, were obtained. These templates were used to classify strides from another horizontal and inclined session obtained on the same day (referred to as session 7/25-t), with identical electrode locations, and two horizontal and inclined sessions obtained on 8/01, referred to as 8/01-I and 8/01-II, respectively. The exact electrode locations for the 8/01 data may differ from the 7/25 session, but the electrode locations did not change between the 8/01-I and 8/01-II sessions. Only four of 61 gait cycles obtained during level gait were found to be more similar to a template derived from inclined gait that to horizontal gait templates. Just two of 64 inclined gait cycles were assigned to horizontal templates. This suggests that the templates are indeed characteristic for the gait condition from which they were derived. Histograms for each of the sessions, showing how many gait cycles within a session resembled a particular template, are presented in the top panel of Fig. 3. As one may see, the histograms for horizontal gait sessions are very much different from the histograms for the inclined sessions. However, the differences between the histograms for the same walking condition are fairly small. Specifically, the differences between the horizontal and inclined histograms are very large, as one may see. The two 7/25 sessions produce virtually identical histograms. The histograms of the 8/01 sessions differ somewhat from the 7/25 sessions, especially for the horizontal sessions, but the differences between the horizontal and inclined sessions remains large. The differences between the histograms were quantified using the measure of (4). The values for the horizontal to inclined, horizontal to horizontal, and inclined to inclined histogram comparisons are presented in Table I. A paired t-test indicated that JANSEN et al.: MULTIDIMENSIONAL EMG-BASED ASSESSMENT OF WALKING DYNAMICS 297 Fig. 3. Histograms for subject A (left) and subject B (right). Dark bars: horizontal gait. Light bars: inclined gait. Each histogram shows the percentage of gait cycles within a session that resembled a particular template. Templates are identified by a numeral followed by an “h” or an “i” (to indicate horizontal or inclined gait template, respectively), followed by a number (e.g., h7 is a horizontal template). Sessions are indicated by month-date, followed by “h” or “i”, identifying them as horizontal or inclined gait, respectively. TABLE I PRINCIPAL DIAGONAL (i.e., FROM UPPER LEFT TO LOWER RIGHT) OF THE UPPER MATRIX SHOWS THE VALUES OF SUBJECT A FOR THE COMPARISON BETWEEN THE HISTOGRAMS OF THE HORIZONTAL AND INCLINED GAIT VALUES CONDITIONS FOR EACH OF THE THREE TEST SESSIONS. FOR HORIZONTAL TO HORIZONTAL COMPARISONS BETWEEN SESSIONS ARE SHOWN ABOVE THE PRINCIPAL DIAGONAL, AND THE NUMBERS BELOW THE PRINCIPAL DIAGONAL SHOW THE INCLINED TO INCLINED HISTOGRAM COMPARISONS. MEANS AND STANDARD DEVIATIONS OF FOR HORIZONTAL VERSUS INCLINED (H VS. I), HORIZONTAL VERSUS HORIZONTAL (H VS. H) AND INCLINED VERSUS INCLINED (I VS. I) ACROSS ALL SESSIONS ARE SHOWN IN THE LOWER MATRIX D D D Fig. 4. EMG from VL, BF, TA, and G of the dominant templates of subject A, during horizontal gait (top panel) and inclined gait (bottom panel). the differences between level and inclined gait are significantly 0.01 . larger than between identical conditions The linear envelopes of the EMG associated with the most prevalent horizontal and inclined template are presented in Fig. 4. As one may see, the BF activity is somewhat reduced toward the end of the stride for inclined as compared to horizontal gait. The primary differences between horizontal and inclined EMG patterns are changes in the timing of the onset of EMG activation. The most striking difference can be observed in the TA, which reaches maximal activity around 90% of the horizontal stride length, but during inclined gait this maximum is reached much earlier, namely around 70% of the stride length. Smaller shifts can also be seen for the G (25% for horizontal to 35% for inclined), BF (95% horizontal, 88% inclined), and VL (95% horizontal, 100% inclined). A similar experiment was conducted for subject B. One horizontal and one inclined session collected on 8/01 were used to derive templates. Five templates were found—four for horizontal strides and one for inclined gait. Data from another session collected on 8/01 (with identical electrode locations, and referred to as 8/01-t), and one pair of horizontal and inclined sessions each from 7/23 and 7/25, were classified with these templates and the resulting histograms are presented in the bottom panel of Fig. 3. Again, as one can see, the differences between the horizontal and inclined histograms are large, and there are only minor differences between the histograms of 8/01, 7/23 and 7/25. Also, only very few horizontal strides were assigned to values for the horinclined templates, and vice versa. The izontal to inclined, horizontal to horizontal, and inclined to inclined histogram comparisons are presented in Table II. A paired t-test indicated that the differences between level and inclined gait are significantly larger than between identical conditions 0.01 . The linear envelopes of the EMG of the most prevalent horizontal and inclined template are presented in Fig. 5. A small 298 IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING , VOL. 11, NO. 3, SEPTEMBER 2003 TABLE II INTER- AND INTRAGAIT COMPARISONS FOR SUBJECT B. SEE TABLE I FOR AN EXPLANATION TABLE III NUMBER OF TEMPLATES FOR HORIZONTAL (H) AND INCLINED (I) GAIT FOR EACH OF THE THREE TEMPLATE SETS FOR SUBJECT A AND B TABLE IV MEANS D AND STANDARD DEVIATIONS OF THE VALUES FOR THE HORIZONTAL TO INCLINED (HI), HORIZONTAL TO HORIZONTAL (HH), AND INCLINED TO INCLINED (II) HISTOGRAMS, FOR EACH OF THE THREE TEMPLATE SETS FOR SUBJECT A AND B Fig. 5. EMG from VL, BF, TA, and G of the dominant templates of subject B, during horizontal gait (top panel) and inclined gait (bottom panel). decrease in the activity of the G for inclined gait may be observed, but the primary differences between the two conditions, again, appear to be in the relative timing of the EMG activation patterns. The TA, and to a somewhat lesser degree the VL, activate earlier during inclined gait than during level gait. C. Sensitivity to Template Selection The ability to distinguish between gait conditions is critically affected by the template set. The choice of the template set obviously depends on the data used for template extraction. In the present case, data from a single session are used to derive the templates. Conceivably, the gait patterns observed during a single session may not accurately reflect the variety of patterns that could be produced by a subject, resulting in a decreased ability to differentiate between gait conditions. Therefore, experiments were conducted to assess how sensitive the SEA method is to the choice of the template set. Two additional template sets were created for each subject. For subject A, new template sets were extracted from another 7/25 session and from a randomly selected 8/01 session. These sets are referred to as AT2 and AT3, respectively. The original template set will be denoted by AT1. For subject B, the two new template sets came from a 7/23 (BT2) and a 7/25 session (BT3), and again, the original set is denoted by BT1. All template sets had different number of templates, as shown in Table III. Subject A shows relatively little variability in the number of templates extracted, in contrast to subject B. Each of the template sets was used to classify individual values for the strides from three other data sets, and the horizontal to inclined, horizontal to horizontal, and inclined to inclined histogram comparisons were computed. Mean values and standard deviations are presented in Table IV. The values when comparing horizontal to inclined gait are substantially larger than the corresponding values for horizontal-to-horizontal or inclined-to-inclined gait comparisons, suggesting that all template sets can differentiate between level and inclined gait. Template set 3 for subject B shows the least difference between the horizontal-to-inclined and the values, and in fact represents the only inclined-to-inclined case where the difference is not significant. Closer inspection of the data revealed that this template set classified 15 of the 18 gait cycles during the 8/01 inclined session as horizontal gait. This suggests that one session may not be sufficient to adequately capture the variety of gait patterns manifested during one gait condition. IV. DISCUSSION AND CONCLUSION Our results show that an induced change in walking condition can be recognized reliably and consistently with the SEA method, but future research will be needed to determine the smallest possible change in gait patterns that the method can detect. The within-session and day-to-day variability is generally much smaller than the variability between conditions, independent of the choice of the template set. This suggests that our approach is robust with regard to template selection and daily variations that could result from slight differences in electrode placement. However, if this technique is to be used on data collected over a longer period of time, template selection might be more critical in the histogram distributions. Specifically, some of our results suggest that the relatively brief sessions, JANSEN et al.: MULTIDIMENSIONAL EMG-BASED ASSESSMENT OF WALKING DYNAMICS containing about twenty gait cycles, may be insufficient to capture the complete variety of gait patterns that may be produced by a subject, even when the gait condition is tightly controlled. EMG activation patterns characteristic for level and inclined gait have been discovered by the SEA method. Although it is tantalizing to associate these patterns with central pattern generator activity, verification of this link will require more investigation. Further research is also needed to determine if a library of gait templates can be developed. Ideally, each movement type and condition (normal or abnormal) would be associated with one (or more) templates in the library. Once such a library is constructed, it would not be necessary to extract templates for each individual. The SEA method presented in this paper could be used to track changes in movement patterns that may occur as a result of therapeutic intervention. A pretherapy session would be used to define an initial set of templates. Once the therapy starts having an effect on the way the patient executes the movement, changes in the histograms will occur. At that time, the template set will need to be expanded with templates extracted from the most recent session, to account for the new ambulation patterns. If no further changes in the histograms are observed, one may conclude that the treatment effect has reached a stable plateau. Important information may also be contained in the sequence with which movement patterns occur. For example, pattern may always be followed by pattern , but never by pattern . Such information can be quantified using Markov modeling, where each pattern represents a “state.” The set of states and the state transition probabilities would completely define the interactive motor programming of an ensemble of muscles, and could be used to arrive at a truly dynamic assessment of movement. It should be made clear that EMG is just one of many measures routinely used to describe gait. Alternatives include clinical observation and measurement of joint kinematics. The latter can provide position and acceleration of body segments, and the forces acting on them during gait. Which gait parameter to select depends to a great extent on the question to be answered [3]. For instance, when designing an orthosis to support the ankle in patients with a footdrop, it is important to determine the effects of wearing the orthosis on the position of ankle, knee, and hip joints during the entire gait cycle. Thus, isokinematic measures are to be preferred. On the other hand, EMG may be preferred if muscle activity is of primary interest. For example, gait impairments in children with cerebral palsy may be treated by surgically transferring a muscle-tendon unit to a different location. Prior to this intervention, it is essential to asses activity of all pertinent musculature during the child’s gait and determine which muscle-tendon transfer can most successfully affect the interactions of all involved muscles to improve the gait [13]. Post-surgically, EMG assessment is of value to determine if the transferred muscle indeed assumes its new role within the context of the other muscle activity. Such information could be obtained with the EMG-based method presented here. However, multiple measurement modalities will be required in virtually all cases to obtain a complete characterization of the dynamic processes underlying gait. The SEA method introduced here is one component of such a suite of measurement tools to characterize gait and movement in general. 299 REFERENCES [1] J. V. Basmajian and C. J. De Luca, Muscles Alive. Their Functions Revealed by Electromyography, 5th ed. Philadelphia, PA: Williams & Williams, 1985. [2] J. J. Chen and R. G. Shiavi, “Temporal feature extraction and clustering analysis of electromyographic linear envelopes in gait studies,” IEEE Trans. Biomed. Eng., vol. 37, pp. 295–302, Mar. 1990. [3] J. E. Clark, “Dynamical systems perspectives on gait,” in Gait Analysis: Theory and Application, R. L. Craik and C. A. Oatis, Eds. New York: Mosby, 1995, pp. 79–86. [4] B. L. Davis and C. L. Vaughan, “Phasic behavior of EMG signals during gait: use of multivariate statistics,” J. Electromyogr. Kinesiol., vol. 3, pp. 51–60, 1993. [5] L. M. Knutson and G. L. Soderberg, “EMG: Use and interpretation in gait,” in Gait Analysis: Theory and Application, R. L. Craik and C. A. Oatis, Eds. New York: Mosby, 1995, pp. 307–325. [6] C. S. Layne, P. V. McDonalds, and J. J. Bloomberg, “Neuromuscular acivation patterns during treadmill walking after space flight,” Exp. Brain Res., vol. 113, pp. 104–116, 1997. [7] D. E. Marple-Horvat and S. L. Gilbey, “A method for automatic identification of periods of muscular activity from EMG recordings,” J. Neurosci. Meth., vol. 42, pp. 163–167, 1992. [8] D. C. Mavrofrides, “Quantitative analysis of pre- and post-space flight EMG data of human gait,” M.Sc. thesis, Dept. Elect. Comput. Eng., University of Houston, Houston, TX, May 1997. [9] K. S. Olree and C. L. Vaughan, “Fundamental patterns of bilateral muscle activity in human locomotion,” Biol. Cybern., vol. 73, pp. 409–414, 1995. [10] R. Shiavi, J. Bourne, and A. Holland, “Automated extraction of activity features in linear envelopes of locomotor electromyographic patterns,” IEEE Trans. Biomed. Engng., vol. 33, pp. 594–600, 1986. [11] G. L. Soderberg and L. M. Knutson, “A guide for use and interpretation of kinesiologic electromyographic data,” Phys. Ther., vol. 80, pp. 485–498, 2000. [12] F. C. Su and W. L. Wu, “Design and testing a genetic algorithm neural network in the assessment of gait patterns,” Med. Eng. Phys., vol. 22, pp. 67–74, 2000. [13] M. Whittle, Gait Analysis: An Introduction. Oxford, U.K.: Butterworth–Heinemann, 1991. [14] M. E. Wootten, M. P. Kadaba, and G. V. B. Cochran, “Dynamic electromyography. I. Numerical representation using principal component analysis,” J. Orthoped. Res., vol. 8, pp. 247–258, 1990. [15] L. Zhang, R. G. Shiavi, and J. J. Chen, “Clustering analysis and pattern discrimination of EMG linear envelopes,” IEEE Trans. Biomed. Eng., vol. 38, pp. 777–784, Aug. 1991. Ben H. Jansen (S’74–M’76–SM’90) received his B.t.w. and Ir. degrees in electrical engineering from Twente University, Enschede, The Netherlands, in 1973 and 1975, respectively, and the Ph.D. degree in medical informatics from the Free University, Amsterdam, The Netherlands, in 1979. He was a Research Associate and a Research Assistant Professor with the Department of Electrical and Biomedical Engineering, Vanderbilt University, Nashville, TN, through the summer of 1982, at which point he joined the Department of Electrical and Computer Engineering, the University of Houston, Houston, TX. He was promoted to Full Professor in 1992. His research interests include biomedical signal analysis, with an emphasis on electroencephalograms and evoked potentials. He serves on the Editorial Board of Clinical Neurophysiology and is a frequent reviewer for several major biomedical engineering journals. 300 IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING , VOL. 11, NO. 3, SEPTEMBER 2003 Vonda H. Miller received the B.S. degree in computer science from Lamar University, Beaumont, TX, and the M.S. degree in electrical engineering from the University of Houston, Houston, TX. She is currently working toward the Ph.D. degree at the Department of Electrical Engineering, University of Houston. She joined Texas Instruments, Dallas, TX, after the completion of the B.S. degree to develop image recognition and flight control algorithms for cruise missiles in the Defense Suppression Electronics Group. After completion of the M.S. degreed, she joined Boeing, Houston, as a Systems Engineer responsible for avionics hardware and software for the International Space Station. Her research interests include biomedical signal analysis, pattern recognition, and oscillatory neural networks. Ms. Miller was recognized as a Texas Space Grant Fellow from 1996 to 1999. Demetrios C. Mavrofrides received his B.S. degree in electrical engineering from the University of Florida, Gainesville, in 1989 and the M.S. degree in electrical engineering from the University of Houston, Houston, TX, in 1997. He was an Engineer with Martin Marietta Missile Systems, Orlando, FL, from 1989 to 1992. He is currently with SensorWise Inc., Houston. Caroline W. Stegink Jansen received the degree in physical therapy in Utrecht, The Netherlands, in 1973, and the M.S. and Ph.D. degrees in physical therapy from the Texas Woman’s University, Houston, TX, in 1988 and 1995, respectively. She was a Visiting Assistant Professor with the Texas Woman’s University prior to becoming an Assistant Professor at the Physical Therapy Department, the School of Allied Health Sciences, the University of Texas Medical Branch, Galveston, TX, in 1996. Her research interest is in the assessment of impairments, functional use and disability of patients with pathologies affecting primarily the upper extremity. She is interested in the completion of movement patterns in association with repetitive motion injuries. She is currently a Guest Editor for the IEEE TRANSACTIONS ON NEURAL SYSTEMS REHABILITATION ENGINEERING for the topic of splinting of the hand. She serves as member of the Editorial Board and as a reviewer for the Journal of Hand Therapy, as well as reviewer for Physiotherapy: Theory and Practice.