3974
advertisement

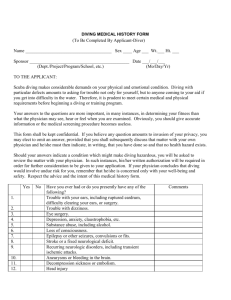
3974 The Journal of Experimental Biology 209, 3974-3983 Published by The Company of Biologists 2006 doi:10.1242/jeb.02482 Regulation of stroke pattern and swim speed across a range of current velocities: diving by common eiders wintering in polynyas in the Canadian Arctic Joel P. Heath1,*, H. Grant Gilchrist2 and Ronald C. Ydenberg1 1 Centre for Wildlife Ecology / Behavioural Ecology Research Group, Department of Biological Sciences, Simon Fraser University, Burnaby, British Columbia, V5A 1S6, Canada and 2National Wildlife Research Centre, Canadian Wildlife Service, 1125 Colonel by Drive, Raven Road, Carleton University, Ottawa, Ontario, K1A 0H3, Canada *Author for correspondence (e-mail: jpheath@sfu.ca) Accepted 9 August 2006 Summary Swim speed during diving has important energetic nearly simultaneous strokes of wings and feet, and swim consequences. Not only do costs increase as drag rises nonspeed relative to the moving water, were maintained linearly with increasing speed, but speed also affects travel within a narrow range (2.28±0.23·Hz; 1.25±0.14·m·s–1, time to foraging patches and therefore time and energy respectively). This close regulation of swim speed over a budgets over the entire dive cycle. However, diving range in current speed of 1.0·m·s–1 might correspond to behaviour has rarely been considered in relation to efficient muscle contraction rates, and probably reduces current velocity. Strong tidal currents around the Belcher work rates by avoiding rapidly increasing drag at greater Islands, Nunavut, Canada, produce polynyas, persistent speeds; however, it also increases travel time to benthic areas of open water in the sea ice which are important foraging patches. Despite regulation of average swim habitats for wildlife wintering in Hudson Bay. Some speed, high instantaneous speeds during oscillatory populations of common eiders Somateria mollissima stroking can increase dive costs due to drag. While most sedentaria remain in polynyas through the winter where diving birds have been considered either foot or wing they dive to forage on benthic invertebrates. Strong tidal propelled, eider ducks used both wing and foot propulsion currents keep polynyas from freezing, but current velocity during descent. Our observations indicate that the power can exceed 1.5·m·s–1 and could influence time and energy phase of foot strokes coincides with the transition between costs of diving and foraging. Polynyas therefore provide upstroke and downstroke of the wings, when drag is naturally occurring flume tanks allowing investigation of greatest. Coordinated timing between foot and wing diving strategies of free ranging birds in relation to propulsion could therefore serve to maintain a steadier current velocity. We used a custom designed sub-sea ice speed during descent and decrease the costs of diving. camera to non-invasively investigate over 150 dives to a Despite tight regulation of stroke and swim speed patterns, depth of 11.3·m by a population of approximately 100 descent duration and total number of foot and wing common eiders at Ulutsatuq polynya during February strokes during descent increase non-linearly with and March of 2002 and 2003. Current speed during increasing current velocity, suggesting an increase in recorded dives ranged from 0 to 1·m·s–1. As currents energetic costs of diving. increased, vertical descent speed of eiders decreased, while descent duration and the number of wing strokes and foot Key words: current, diving, swimming, wing stroke, glide, biomechanics, locomotion, drag, foot propulsion, underwater video. strokes during descent to the bottom increased. However, Introduction Buoyancy, drag and inertia influence the energy budgets of air breathing animals that dive to forage. As depth increases, buoyancy decreases while drag increases to become the primary energetic cost of diving (Lovvorn, 2001; Lovvorn et al., 2004). Drag also increases nonlinearly with speed (Lovvorn, 2001), and recent work using accelerometers on diving animals has shown that swim speed is often maintained within a narrow range that likely minimizes energetic costs of drag (Watanuki et al., 2003; Lovvorn et al., 2004). Propulsion by wings, flippers or feet during diving includes power and recovery phases of muscle contraction, and limb orientation and instantaneous velocity and drag can vary widely throughout stroke cycles. Additionally, as depth increases during descent, less surge during the upstroke is required to counter buoyancy, and downstrokes can provide primary thrust to maintain speed of descent (Watanuki et al., 2003; Lovvorn et al., 2004). Different stroke patterns and intermittent gliding THE JOURNAL OF EXPERIMENTAL BIOLOGY Diving in currents 3975 can therefore be important in regulating swim speed and minimizing the energetic costs of diving (Williams et al., 2000; Watanuki et al., 2003). Costs of locomotion and the importance of swim speed and travel time to foraging patches have received considerable attention in relation to diving depth. However, there is almost no information concerning how currents affect the behaviour and energetics of free ranging divers, and how animals regulate their locomotion across a range of current speeds. Given the substantially increased effects of drag with speed and expectation that animals should travel at an average speed that reduces expensive drag costs [(see Lovvorn et al., 1999; Pennycuick, 1997) for flight], strong current velocities could have a considerable influence on locomotion and time and energy budgets of diving animals. As drag increases with increasing speed, managing energy costs of diving entails maintenance of a steady instantaneous velocity during locomotion, in addition to regulation of average swim speed. This is because strong drag-induced deceleration during the recovery phase requires strong acceleration during the power phase to maintain average velocity (Lovvorn et al., 1999; Lovvorn and Liggins, 2002). Maintaining a steady instantaneous velocity could be difficult when diving in currents. Wing propelled divers can produce thrust during both the upstroke and down stroke. Greater drag on the wings during the active part of the upstroke will substantially influence the animals’ ability to maintain constant velocity for a given work per stroke and stroke duration (Lovvorn and Liggins, 2002; Lovvorn et al., 2004). In foot propulsion, little or negative thrust occurs during the recovery phase, and maintaining average descent speed requires increased instantaneous velocity during the power phase, which substantially increases drag (Lovvorn, 2001; Lovvorn and Liggins, 2002). Preliminary observations indicate free ranging eiders use both wing and foot propulsion ubiquitously throughout descent. Co-ordination between wing and foot propulsion could be particularly important in overcoming deceleration and maintaining a steadier speed through stroke cycles. Energetically efficient diving strategies must also incorporate efficient muscle contraction rates, which are expected to involve constant work per stroke (Lovvorn et al., 1999; Kovacs and Meyers, 2000). Therefore, efficient regulation of average swim speed can require the maintenance of a constant contraction rate, stroke duration, and work per stroke, all while altering stroke frequency and/or gliding between strokes. This has been observed over increasing depths for both birds and mammals (Williams et al., 2000; Watanuki et al., 2003; Lovvorn et al., 2004; Watanuki et al., 2005). Regulation of swim speed through altering stroke frequency and/or gliding could be particularly important under increasing currents, as an increase in swim speed relative to the fluid would be required just to maintain position in the water column. Given strong non-linear increases in drag with speed, maximizing energetic economy across increasing currents likely entails regulating swim speed within a narrow range that reduces drag costs. Recent work indicates that there is not a distinct breakpoint of increasing drag with increasing speed (Lovvorn et al., 2001); however, birds appear to regulate speed to avoid rapidly increasing drag at higher speeds (Lovvorn et al., 2004). Accelerometer data also indicate that efficiency of muscle contraction is an important component determining efficient work against drag (Lovvorn et al., 2004; Watanuki et al., 2005). Regardless of the mechanism, as currents increase, a diver could regulate effective swim speed (relative to the water) by maintaining stroke duration, work per stroke and stroke frequency. This would incur a reduced vertical descent speed, and therefore an increased number of wing strokes and time required to reach benthic foraging patches. Despite these particular details, the component of dive costs due to drag is expected to increase steeply and non-linearly with current velocity. Among the Belcher Islands of south-east Hudson Bay, strong tidal currents pass between islands; in winter, these currents maintain persistent open water areas called ‘polynyas’. These polynyas are important winter habitat for a variety of marine mammals and birds, including common eiders Somateria mollissima sedentaria, which dive to the sea floor to forage on benthic invertebrates (Gilchrist and Robertson, 2000). Current speed in these polynyas vary predictably from 0·m·s–1 at slack tide, to in excess of 1.5·m·s–1, providing a naturally occurring flume tank over the tidal cycle. Preliminary observations showed that common eiders stop foraging and rest on the ice edge at peak currents, leading us to question how tidal currents influence their diving and foraging behaviour and affect their ability to balance energy budgets during the winter in the arctic. Data obtained from recent advances in animal-borne devices have helped elucidate diving behaviour of birds and mammals at sea. However, logger attachment is potentially invasive and may have negative effects on hydrodynamics of birds (RopertCoudert and Wilson, 2005). Further, both field and captive dive tank studies have typically been restricted to a small number of individuals, and individual variation in dive parameters is often high (e.g. Halsey et al., 2003). In the present study, the clear arctic water and restricted area of the open water habitat allowed us to deploy a video camera beneath the ice so that we could to record complete dives of approximately 100 wintering common eiders as they descended to forage at a constant depth (11.3·m). Here we describe the diving behaviour of common eiders in relation to variation in tidal current velocity ranging from 0–1.0·m·s–1. We investigate the prediction that eiders respond to increasing costs of drag as current speed increases by maintaining relatively constant swim speed and stroke patterns, at the cost of increasing travel time to the sea floor. These varying time and energy costs can have strong influence on foraging patterns over the dive cycle (Houston and Carbone, 1992; Thompson et al., 1993; Boyd, 1997) and could be particularly important for eiders attempting to balance their energy budgets in the arctic during winter. Materials and methods In collaboration with Inuit from the community of Sanikiluaq, Nunavut, we studied the diving and foraging THE JOURNAL OF EXPERIMENTAL BIOLOGY 3976 J. P. Heath, H. G. Gilchrist and R. C. Ydenberg Sea ice edge Dive angle (0−20° in Fig. 5) Current (0−1.0 m s–1) ) id flu o et iv lat (re y cit lo ity ve loc ve im nt sw sce de ve al cti rtic fe ve ef ed sured a Me lat lcu Quantifying tidal currents We quantified tidal current velocities using a Nortek Aquadopp 3D current meter (Vangkronken, Norway) with a directional fin deployed in the middle of the water column (~5.5·m from the surface) on a mooring line anchored to both the bottom and the sea ice within several meters of the polynya edge. This device uses three acoustic beams to measure Doppler velocity to an accuracy of 1% of measured value ± 0.5·cm·s–1 sampled at 23·Hz and set to average velocity over 10·min intervals throughout the duration of the study. Synchronizing Aquadopp and video time therefore allowed us to quantify an average current velocity associated with each eider’s dive. Calculation of effective swim velocity We used vector trigonometry to calculate effective swim speed (m·s–1) relative to the water, based on known vectors of horizontal current velocity (current) and descent velocity (descent). Ducks always dived directly into the current and ended upstream of their departing point. We estimated an average dive angle of 10° given a known depth of 11.3·m and an average difference of about 2·m horizontal distance upstream from where the birds departed the surface and arrived Ca Video analysis From digital videos we recorded the durations of descent, frequency and cumulative number of wing stroke and foot stroke cycles during each descent, and the timing of wing stroke and foot stroke stages. Departure from the surface was quantified as the frame in which the bill of the bird broke the surface of the water. The time at which the bird reached the bottom was determined by a change in the body axis to a horizontal direction, which was also accompanied by cessation of wing flaps (only feet and not wings were used while the birds were foraging at the bottom). The video recorded at 30 frames per second (f.p.s.), and so maximum accuracy of calculated durations were 1/30th of a second. Wing flaps were counted by recording the point at which the wings reached a fully closed position within the wing stroke cycle. Foot strokes were counted when the leg reached full extension following the power phase. To evaluate if mid-water current velocity was representative of the water column, we used a Nortek Aquadopp current profiler mounted below the sea ice near the edge of the polynya, within 5·m of where eiders were diving. This instrument allowed quantification of average current velocity within 0.5·m depth categories across the water column, at 10·min intervals (with the exception of current velocities within 0.5·m of the surface and bottom boundaries, which are not accurately quantified by this instrument). As data from this instrument indicated that, across the tidal cycle, there was extremely little variation in current velocity across depth categories (mean coefficient of variation across 24·h on March 05, 2003 was 0.003±0.002·m·s–1), only data from the mid-water deployment Aquadopp was used in dive analyses. Depth (11.3 m) behaviour of Common Eiders Somateria mollissima sedentaria L. wintering at Ulutsa tuk polynya during February and March of 2002 and 2003. We observed complete dives by deploying a Sony DCR-TRV730 camera in a modified underwater casing through a hole chopped in the ice at the edge of the polynya. At this location eider ducks dived 11.3·m to forage on benthic invertebrates on the sea floor. We designed a camera support apparatus that allowed full three-dimensional camera movement from the surface. A pole mounted in a support frame allowed us to raise and lower the camera, and rotate it through 360°. The camera casing was mounted on a spring-loaded platform at the end of the pole, which was connected to a pulley at the surface. This allowed us to tilt the camera through 180°, from the surface to the sea floor. Cables extended from the camera casing to a power source, camera controller, and video monitor on the surface, and allowed us to film complete dives of eiders. 157 dives were recorded by opportunistically following eiders departing the surface, which likely represents an essentially random sample of the eiders wintering at Ulutsatuk polynya (approx. 100 individuals). Observations were conducted during the day, throughout the tidal cycle, as long as eiders were still diving. Although tides were semidiurnal, behavioural observations over 24·h periods indicated that diving at night was extremely rare. Upstream displacement (~2 m) Bottom Fig.·1. A schematic illustrating the measured descent velocity of an eider diving into currents at the edge of a polynya. Eiders always dived into currents and ended upstream of their surface departure point. This schematic illustrates the dive angle and vectors used to calculate effective swim velocity, relative to the moving fluid, as described in the text. THE JOURNAL OF EXPERIMENTAL BIOLOGY Diving in currents 3977 on the bottom (see Fig.·1). Therefore, we calculated swim speed relative to the water (swim) as: Swim = 冪 Descent2 + Current2 – [2⫻Descent⫻Current⫻cos(80)]·. (1) For sensitivity analysis, we also present results based on dive angles ranging from 0° to 20° (i.e. 70° to 90° relative to horizontal/current direction). Statistics Regression analysis was used to determine relationships between the durations of each diving parameter and current velocity. Quadratic regression was used when it explained more of the variation in diving parameters, which was expected as the effects of drag are known to increase non-linearly with speed (Lovvorn et al., 1991). JPM 5.0.1.2 (SAS Institute, Cary, NC, USA) was used for all statistical analysis. Values presented in the text are mean ± the standard deviation (s.d.). Results Wing propulsion Our observations of free ranging eiders diving to 11.3·m indicated that both wings and feet were used ubiquitously during descent. An average wing stroke frequency of 2.28·Hz (which did not vary with current speed; see below) corresponds to a stroke cycle duration of 0.439·s, or 13 frames of video at 30·f.p.s. Fig.·2 illustrates, from four perspectives (rows; based on dives that differed in their position relative to the camera), the various stages of the stoke cycle in 13 frames at intervals of 1/30th of a second. Wing strokes were broken into three phases, the upstroke, transition and downstroke, based on the orientation of the leading and trailing edges of the wing. The upstroke was defined as movement of the wings from completely closed, and while the leading edge was being raised, without a change in the angle of attack (Fig.·2, frames 1–6). During the upstroke, the wings were oriented at a shallow angle of attack relative to the direction of travel, where water could presumably flow easily across the wing. This likely lowered drag at this stage. While this stage of the wing cycle may provide some surge [downwards momentum (see Watanuki et al., 2003)], the lack of bubbles generated by vortex shedding of the wing boundary layer suggests that this was weak. The benign angle of attack in the direction of travel suggests that forward momentum in this stage may be primarily through passive gliding. Further, the head tended to be pointed downwards at the steepest angle, almost orthogonal to the body axis, during this stage of the wing stroke cycle (Fig.·2, frame 5). The transition phase was considered to have begun once the leading edge of the wing began to travel downwards (Fig.·2, frame 7). During the transition phase between the upstroke and downstroke, the trailing edge of the wings were still being raised and the wings were oriented at a high angle of attack so that the broad side of the wings were facing the direction of travel (Fig.·2, frames 7–10). This indicates there was probably significant drag occurring during this stage, as suggested by Stettenheim (Stettenheim, 1959) (see also Lovvorn et al., 2004); however, downwards surge to counter buoyancy could also be important in this stage (Watanuki et al., 2003; Lovvorn et al., 2004). Numerous bubbles could be seen shedding off the tips of the secondary wing feathers in this stage (Fig.·2, frames 8–9, particularly visible in the bottom two rows). During the transition phase, the head and neck orientation changed from parallel to its steepest upwards angle with respect to the body axis (Fig.·2, frame 10). During the downstroke, both the leading and trailing edge of the wing were lowered, quickly closing the wings, during which the majority of propulsion appears to have occurred (Fig.·2, frames 11–13). The change in the movement of the trailing edge of the wing from being raised to being lowered is most obvious in the second row of Fig.·2, between frames 10 and 11, as the tips of the primary feathers change from being bent slightly backwards to being bent forwards. Although the steep angle of attack during the transition phase may have entailed considerable drag, this steep angle probably allowed a greater surface area of the wings to contact the water and facilitate propulsion in the downstroke. During the downstroke, the wings were oriented at a low angle of attack, with the broad side of the wings orthogonal to the direction of travel, which presumably reduced drag, increasing forward momentum. Vortex shedding across the tips of the primary feathers also appeared to occur during the final stage of the downstroke, in frames 12 and 13. Additionally, the neck tended to be fully extended parallel with the body axis throughout frames 12 and 13. Overall, neck and body orientation undulated across the wing stroke cycle, which left a distinct saw tooth pattern of bubbles in the water column. Foot propulsion Foot strokes were also divided into three categories, thrust, retract and glide stages. Through the wing stroke cycle, the feet were most often in the glide phase, which was defined as the legs being fully extended, parallel with the body and with both feet tucked under the tail. Most often in this stage, the toes were closed, which could further minimize drag across the webbing. Foot retraction, or the recovery phase, was defined as the feet being pulled forwards with the webbing closed (Fig.·2, frame 5–7). Foot retraction was immediately followed by the power or thrust phase where the leg was quickly pushed backward with the webbing extended, until the leg was fully extended backward (Fig.·2, frame 8–10). Fig.·3 illustrates the stages of the foot and wing strokes and their timing corresponding with frames in Fig.·2. This indicates that the thrust phase of foot strokes corresponded with the transition between the upstroke and downstroke of the wings, when the angle of attack and drag across the wings was greatest. Feet were maintained in a gliding position throughout the remainder of the wing stroke cycle, even though there was adequate time for another foot stroke. THE JOURNAL OF EXPERIMENTAL BIOLOGY 3978 J. P. Heath, H. G. Gilchrist and R. C. Ydenberg THE JOURNAL OF EXPERIMENTAL BIOLOGY Fig.·2. Various stages of the wing and foot stoke cycle illustrated from 1/30th of a second video frames of common eiders during descent, from four different angles (rows). Each stroke cycle illustrated was 0.43·s and so frame numbers from 1 to 13 are used to describe the various stages of the stroke cycle in the text, and correspond with stoke cycle stages indicated in Fig.·3. Diving in currents 3979 THE JOURNAL OF EXPERIMENTAL BIOLOGY Glide Retract Kick thrust Upstroke Transition Downstroke 12⬘ 1 3 5 7 9 11 13 2⬘ 4⬘ 6⬘ Frame number (1/30th second) Fig.·3. Timing of various stages of the wing and foot stroke cycle. Wing (black circles) and foot (white circles) stokes are divided into three stages, which are illustrated in Fig.·2 and described in the text. Thrust from foot propulsion ubiquitously corresponded with the transition between the upstroke and downstroke of the wings, when drag is probably greatest because of the large angle of attack of the wings. Correspondence in timing between power and recover phases of wing and foot propulsion could therefore be important in maintaining steady speed, minimizing the cost of drag during diving. No. of wing stroke cycles 50 A 40 30 20 10 22 Descent duration (s) 20 Diving behaviour in relation to current velocity As predicted, descent duration increased non-linearly with increasing current velocity to a constant depth of 11.3·m (quadratic regression: R2=0.367, d.f.=155, P<0.0001; Fig.·4A). Mean (±s.d.) descent duration was 10.47±1.99·s, and so average vertical descent speed (relative to the bottom) was 1.11±0.17·m·s–1. The number of wing stroke cycles during the descent also increased non-linearly with current velocity with an average of 22.01±4.12 strokes per descent (R2=0.395, d.f.=153, P<0.0001; Fig.·4B). This increase in number of strokes with current velocity occurred while maintaining a constant average stroke frequency of 2.28±0.23·Hz across current velocities (R2=0.00008, d.f.=72, P=0.938; Fig.·5). Remarkably, effective swim speed (relative to water) showed only a slight increase across current velocities (R2=0.112, d.f.=156, P<0.0001; estimated dive angle=10°, Fig.·6) with an average value of 1.25±0.14·m·s–1 despite a current gradient of 1.0·m·s–1. Regression equations are presented in Table·1. Discussion Stroke patterns Diving birds have often been considered to use either feet or wings for propulsion. For divers that use lift-based wing propulsion, deceleration between the upstroke and downstroke is high, with drag expected to be greatest because of the high angle of attack of wings (Stettenheim, 1959; Lovvorn et al., 1999; Lovvorn et al., 2004). For divers employing drag-based foot propulsion, drag from trailing feet could be high [(e.g. Pennycuick et al., 1996) for flight] and deceleration and even negative thrust can occur during the recovery phase (Lovvorn et al., 1991). Generally, lift-based wing propulsion is more efficient than drag-based foot propulsion (Fish, 1993; Fish, 1996; Lovvorn and Liggins, 2002). For each mode of locomotion separately, increased instantaneous velocity and therefore increased drag costs during the power phase would be required to counter deceleration during the recovery phase, in order to maintain a mean swim speed that keeps work against drag within B 2.7 18 2.6 16 14 12 10 8 0 0.2 0.4 0.6 0.8 Current velocity (m 1.0 s –1) Fig.·4. Descent duration (A) and number of wing stroke cycles (B) to descend to depth (11.3·m) increased non-linearly with increasing current velocity (m·s–1). Note that each wing stroke cycle also included a foot stroke. Stroke frequency (Hz) Wing stroke Foot stroke 3980 J. P. Heath, H. G. Gilchrist and R. C. Ydenberg 2.5 2.4 2.3 2.2 2.1 2.0 1.9 0 0.2 0.4 0.6 Current velocity 0.8 1.0 (m s–1) Fig.·5. Average stroke cycle frequency per dive did not vary with respect to current velocity. THE JOURNAL OF EXPERIMENTAL BIOLOGY Diving in currents 3981 Table·1. Regression equations for descent durations and wing strokes versus current velocity; vertical descent speed relative to the bottom and effective swim speed relative to the water as a function of current 1.5 Speed (m s–1) 1.4 1.3 Descent=8.938+3.192⫻Current+5.616(Current–0.3528)2 Stroke=18.507+8.518⫻Current+5.737(Current–0.3528)2 Speedrel=1.243–0.302⫻Current–0.3428(Current–0.3528)2 Speedeff=1.191+0.175⫻Current 1.2 1.1 1.0 0.9 0.8 0 Effective swim speed 95% CI Descent speed 0.2 0.4 0.6 Current velocity 0.8 1.0 (m s–1) Fig.·6. Regression equation of vertical descent speed (relative to the bottom; solid line) and effective swim speed relative to the fluid (calculated using vector geometry; see Materials and methods), over a range of current speeds. The dashed line is regression of effective swim speed at a dive angle of 10° with 95% confidence intervals. The shaded area indicates regression equations from sensitivity analysis of dive angle from 0° (lower edge of shaded area) to 20° (upper edge of shaded area). Effective swim speed was regulated across currents at a relatively constant value of 1.24±0.14·m·s–1 while vertical descent velocity decreased non-linearly. Regression equations are presented in Table·1. desirable bounds (Lovvorn, 2001; Lovvorn and Liggins, 2002). Maintaining a more steady velocity through the stroke cycle can therefore reduce energetic costs of diving (Lovvorn, 2001). Common eiders diving in an arctic polynya used both wings and feet to power their descent. Diving eiders exclusively timed the power phase of foot propulsion with the transition between the upstroke and downstroke of the wings, when drag is high across the steep angle of attack of wings (Figs·2 and 3). This timing could reduce drag costs if it provided a more steady velocity through both foot and wing propelled stroke cycles. For example, the use of multiple propulsors by boxfishes (family Ostraciidae) can allow smooth thrust production and a steady trajectory during swimming (Hove et al., 2001; Gordon et al., 2000). Similarly, river otters (Lutra canadensis) coordinate hindlimb and tail propulsion to maintain a more constant velocity during undulatory swimming (Fish, 1994). Integrating synergistic interactions among different appendages during locomotion will be important for understanding the energetics of swimming (see Dickinson et al., 2000). Our observation of co-ordinated timing of foot and wing stroke patterns suggests an important mechanism by which diving birds could maintain steady velocity and reduce costs of diving. Confirming that the alternating timing of wings and feet stroke patterns provides the most efficient propulsion strategy for eiders would require measuring instantaneous velocity throughout the stroke cycle (using accelerometers or spatially referenced video) on birds diving with different foot–wing stroke patterns, ranging from just wings or feet, to all temporal Descent, descent duration (s). Stroke, wing strokes (counts). Current, current velocity (m·s–1). Speedrel, vertical descent speed relative to the bottom. Speedeff, effective swim speed relative to the water. Relevant statistical analyses are presented in the text. combinations. This will be a difficult empirical challenge and further insight will probably come from modelling (e.g. Lovvorn et al., 2004). Eiders kept their feet extended (glide phase) for a large portion of the wing stroke cycle during which there was adequate time to complete an additional foot stroke. This could have allowed foot thrust during the transition between the downstroke and upstroke of the wings. The angle of attack of wings was low during this stage, so deceleration due to drag may not be adequate to necessitate an additional foot stroke, particularly if drag during retraction of feet interferes with gliding. Undulation of the neck and body, as we observed for eiders, could also be an important consideration in estimating swimming costs based on dead-drag measurements (Blake, 1983). Influence of current velocity At dive depths up to 11.3·m studied in this analysis, energetic costs to counter buoyancy during diving are important but decrease with depth (Wilson et al., 1992; Lovvorn et al., 2004). Drag increases at a slower rate than buoyancy decreases with depth, however, drag can be one of the most important factors influencing the energetics of diving, particularly as buoyancy decreases (Lovvorn, 2001; Lovvorn et al., 2004). Drag is especially important in relation to increasing swim and current speed, as drag increases rapidly with increasing speed (Lovvorn et al., 1991). Regulation of swim speed within a narrow range that controls drag costs has been observed over a range of depths for diving Brünnich’s guillemots [1.6±0.2·m·s–1 over presumably little current (Lovvorn et al., 2004)] and flight speeds of a variety of birds (Pennycuick, 1997). Our results indicate that eiders maintained a constant stroke frequency, and that effective swim speed (relative to the fluid) only slightly increased as current velocity increased (Figs·5 and 6). Overall, effective swim speed was therefore regulated at 1.25±0.14·m·s–1, which is particularly impressive given that current velocities ranged from 0.04–0.97·m·s–1 during these observations. Although a distinct breakpoint of increasing drag relative to speed is not obvious from tow-tank measurements for frozen THE JOURNAL OF EXPERIMENTAL BIOLOGY 3982 J. P. Heath, H. G. Gilchrist and R. C. Ydenberg eiders, the steeply accelerating drag curve certainly suggest that swim speed is regulated to limit work against rapidly increasing drag (Lovvorn et al., 2001; Lovvorn et al., 2004; Watanuki et al., 2005; Dial et al., 1997). The constant stroke frequency we observed may correspond to an efficient maximum for eiders. Regulation of swim speed and stroke frequency by necessity resulted in a decrease in vertical descent speed relative to the bottom, and therefore increased descent duration and the number of stroke cycles required to descend to the bottom. While tightly regulated, effective swim speed significantly increased by approximately 0.18·m·s–1 with current velocity. Overall, this would suggest an important increase in metabolic rate and oxygen consumption during descent in faster currents (Hawkins et al., 2000), and the increase in number of wing strokes probably indicates increasing energetic costs (Williams et al., 2000; Williams et al., 2004). Therefore, while common eiders employ a variety of tactics to reduce energy costs during diving (timing of foot and wing strokes, regulation of stroke frequency and swim speed), increasing currents nevertheless increase the time and energy costs of descent to foraging patches. These costs are expected to have a strong influence on time allocation over the dive cycles, particularly on time available to forage at depth (Houston and Carbone, 1992). During fast currents, common eiders wintering at Ulutsatuq polynya get out of the water and rest on the ice edge. Although swim speeds required to descend in fast currents could be possible, the strong increase in drag and energetic costs of diving potentially make foraging unprofitable. Consideration of these factors will be particularly important in developing our understanding of the energetics of diving by free ranging birds. Although diving ecology is the focus of the present manuscript, this study would not have been possible without the assistance of local ecological knowledge from the Inuit of Sanikiluaq. Their assistance helped to locate an ideal study site and establish the logistical support in the field necessary to successfully record underwater videos; particularly in identifying sea ice on which it was safe to walk and set up research equipment. We literally followed in their footsteps for this research, for which we are gratefully indebted. Thanks to numerous people for field work and logistical support, particularly Karel Allard, Lucassie Arragutainaq, Rachael Bryant, Lucassie Ippaq, Simeonie Kavik, Elijah Oqaituk, Myra Robertson, Dwayne Searle and Paul Smith. Thanks to Dan Esler, Tony Williams, Jim Lovvorn and an anonymous reviewer for helpful comments on the manuscript. Support was provided by the Canadian Wildlife Service, Nunavut Community Development Fund, Northern Ecosystem Initiative, Wildlife Habitat Canada, World Wildlife Fund Canada, Polar Continental Shelf, Association of Canadian Universities for Northern Studies, Nunavut Wildlife Management Board, ArcticNet National Centre of Excellence Theme 3.6, University of Manitoba, Northern Scientific Training Program, the Centre for Wildlife Ecology at Simon Fraser University and an NSERC PGS-B scholarship to J.P.H. References Blake, R. W. (1983). Fish Locomotion. Cambridge: Cambridge University Press. Boyd, I. L. (1997). The behavioural and physiological ecology of diving. Trends Ecol. Evol. 12, 213-217. Dial, K. P., Biewener, A. A., Tobalske, B. W. and Warrick, D. R. (1997). Mechanical power output of bird flight. Nature 390, 67-70. Dickinson, M. H., Farley, C. T., Full, R. J., Koehl, M. A., Kram, R. and Lehman, S. (2000). How animals move: an integrative view. Science 288, 100-106. Fish, F. E. (1993). Influence of hydrodynamic design and propulsive mode on mammalian swimming energetics. Aust. J. Zool. 42, 79-101. Fish, F. E. (1994). Association of propulsive swimming mode with behaviour in river otters (Lutra canadensis). J. Mammal. 75, 989-997. Fish, F. E. (1996). Transitions from drag-based to lift-based propulsion in mammalian swimming. Am. Zool. 26, 628-641. Gilchrist, H. G. and Robertson, G. J. (2000). Observations of marine birds and mammals wintering at polynyas and ice edges in the Belcher Islands, Nunavut, Canada. Arctic 53, 61-68. Gordon, M. S., Hove, J. R., Webb, P. W. and Weihs, D. (2000). Boxfishes as unusually well-controlled autonomous underwater vehicles. Physiol. Biochem. Zool. 73, 663-671. Halsey, L., Woakes, A. and Butler, P. (2003). Testing optimal foraging models for airbreathing divers. Anim. Behav. 65, 641-653. Hawkins, P. A. J., Butler, P. J., Woakes, A. J. and Speakman, J. R. (2000). Estimation of the rate of oxygen consumption of the common eider duck (Somateria mollissima), with some measurements of heart rate during voluntary dives. J. Exp. Biol. 203, 2819-2832. Houston, A. I. and Carbone, C. (1992). The optimal allocation of time during the dive cycle. Behav. Ecol. 3, 255-265. Hove, J. R., O’Bryan, L. M., Gordon, M. S., Webb, P. W. and Weihs, D. (2001). Boxfishes (Teleostei: Ostraciidae) as a model system for fishes swimming with many fins: kinematics. J. Exp. Biol. 204, 1459-1471. Kovacs, C. E. and Meyers, R. A. (2000). Anatomy and histochemistry of flight muscles in a wing-propelled diving bird, the Atlantic puffin, Fratercula arctica. J. Morphol. 244, 109-125. Lovvorn, J. R. (2001). Upstroke thrust, drag effects, and stroke glide cycles in wing-propelled swimming by birds. Am. Zool. 41, 154-165. Lovvorn, J. R. and Liggins, G. A. (2002). Interactions of body shape, body size and stroke-acceleration patterns in costs of underwater swimming by birds. Funct. Ecol. 16, 106-112. Lovvorn, J. R., Jones, D. R. and Blake, R. W. (1991). Mechanisms of underwater locomotion in diving ducks: drag, buoyancy and acceleration in a size gradient of species. J. Exp. Biol. 159, 89-108. Lovvorn, J. R., Croll, D. A. and Liggins, G. A. (1999). Mechanical versus physiological determinants of swimming speeds in diving Brünnich’s guillemots. J. Exp. Biol. 202, 1741-1752. Lovvorn, J. R., Liggins, G. A., Borstad, M. H., Calisal, S. M. and Mikkelsen, J. (2001). Hyrdodynamic drag of diving birds: effects of body size, body shape and feathers at steady speeds. J. Exp. Biol. 204, 15471557. Lovvorn, J. R., Watanuki, Y., Kato, A., Naito, Y. and Liggins, G. A. (2004). Stoke patterns and regulation of swim speed and energy costs in free-ranging Brünnich’s guillemots. J. Exp. Biol. 207, 4679-4695. Pennycuick, C. J. (1997). Actual and ‘optimum’ flight speeds: field data reassessed. J. Exp. Biol. 200, 2355-2361. Pennycuick, C. J., Klaassen, M., Kvist, A. and Lindström, A. K. (1996). Wingbeat frequency and the body drag anomaly: wind tunnel observations on a thrush nightingale (Luscinia luscinia) and a teal (Anas crecca). J. Exp. Biol. 199, 2757-2765. Ropert-Coudert, Y. and Wilson, R. P. (2005). Trends and perspectives in animal-attached remote sensing. Front. Ecol. Environ. 3, 437-444. Stettenheim, P. (1959). Adaptations for Underwater Swimming in the Common Murre (Uria aalge). PhD thesis, University of Michigan, Ann Arbor, USA. Thompson, D., Hiby, A. R. and Fedak, M. A. (1993). How fast should I swim? Behavioural implications of diving physiology. Symp. Zool. Soc. Lond. 66, 349-368. Watanuki, Y., Niizuma, Y., Gabrielsen, G. W., Sato, K. and Naito, Y. THE JOURNAL OF EXPERIMENTAL BIOLOGY Diving in currents 3983 (2003). Stroke and glide of wing-propelled divers: deep diving seabirds adjust surge frequency to bouyancy change with depth. Proc. R. Soc. Lond. B Biol. Sci. 270, 483-488. Watanuki, Y., Takahashi, A., Daunt, F., Wanless, S., Harris, M., Sato, K. and Naito, Y. (2005). Regulation of stroke and glide in a foot-propelled avian diver. J. Exp. Biol. 208, 2207-2216. Williams, T. M., Davis, R. W., Fuiman, L. A., Francis, J., Le Boeuf, B. J., Horning, M., Calambokids, J. and Croll, D. A. (2000). Sink or swim: strategies for cost-efficient diving by marine mammals. Science 288, 133136. Williams, T. M., Fuiman, L. A., Horning, M. and Davis, R. W. (2004). The cost of foraging by a marine predator, the Wedell seal Leptonychotes weddellii: pricing by the stroke. J. Exp. Biol. 207, 973-982. Wilson, R. P., Hustler, K., Ryan, P. G., Burger, A. E. and Nodeke, E. C. (1992). Diving birds in cold water: do Archimedes and Boyle determine energetic costs? Am. Nat. 140, 179-200. THE JOURNAL OF EXPERIMENTAL BIOLOGY