Document 10653751
advertisement

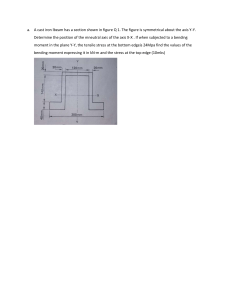
Euler-Bernoulli Bending Theory (Pure Bending Moment) A ψ z D dw C dx M neutral axis M x B ux uz = w(x) = vertical deflection of the neutral axis z u x = − zψ ( x ) If the plane AB remains perpendicular to CD ux = − z dw dx dw dx ψ ψ= dw dx ux = − z dw dx ∂u x d 2w = −z 2 ε xx = ∂x dx If we assume σ yy = σ zz = σ xy = σ yz = 0 The stress-strain relations give ε xx = 1 ⎡σ xx −ν (σ yy + σ zz ) ⎤ ⎦ E⎣ d 2w σ xx = − E z 2 dx ⎛ ∂u x ∂u z + ∂x ⎝ ∂z σ xz = G ⎜ ⎞ ⎛ dw dw ⎞ = G − ⎜ ⎟=0 ⎟ ⎝ dx dx ⎠ ⎠ z d 2w σ xx = − E z 2 dx y σ xx M = − ∫ σ xx z dA M A =E xx d w 2 z dA dx 2 ∫A dA = 0 A ∫ σ xx y dA = 0 A x A 2 d 2w = EI 2 dx ∫σ y z σ xx = − Mz I ∫ zdA = 0 neutral axis is at centroid A ∫ y z dA = 0 A cross-section must be symmetric Engineering Beam Theory z x qz M ( x) z σ = − Let xx I V ( x)Q ( z ) σ xz = − I t ( z) M V [ Note: we still have u x = − z σ xz = 0 dM 2 = V ( x) d w dx M = EI 2 dx dV = qz ( x ) dx dw ⎛ dw ⎞ = ψ ⎜ ⎟ dx ⎠ dx ⎝ (inconsistent) ] d 4w EI 4 = qz ( x ) dx qz … applied force/unit length on beam in zdirection so that dM = V ( x) dx dV = qz ( x ) dx How are these internal force and bending moment equilibrium relations related to our local equilibrium equations? ∂σ xx ∂σ xy ∂σ xz + + =0 ∂x ∂y ∂z ∂σ xy ∂x + ∂σ yy ∂y + ∂σ yz ∂z =0 ∂σ xz ∂σ yz ∂σ zz + + =0 ∂x ∂y ∂z ∂σ xx ∂σ xy ∂σ xz + + =0 ∂x ∂y ∂z multiply by z and integrate over the cross-section, A ∫z A ⎛ ∂σ ∂σ xx ∂σ dA + ∫ z ⎜ xy + xz ∂x ∂y ∂z A ⎝ ⎞ ⎟ dA = 0 ⎠ ⎡∂ ⎤ d ∂ z σ dA + z σ + z σ ( ) ( ) xx ∫A ⎢⎣ ∂y xy ∂z xz ⎥⎦ dA − ∫A σ xz dA = 0 dx ∫A or, equivalently - V(x) - M(x) z ∂f ∫A ∂y dA = vC∫ f ny ds n nz ny A C y ∂f ∫A ∂z dA = vC∫ f nz ds Gauss’ theorem (2-D) − dM + ∫ z ( n yσ xy + nzσ xz ) ds + V ( x ) = 0 dx v C Tx( z n) n y Tx( ) = 0 n dM = V ( x) dx Now, consider ∂σ xz ∂σ yz ∂σ zz + + =0 ∂x ∂y ∂z integrating over A ⎛ ∂σ yz ∂σ zz d σ xz dA + ∫ ⎜ + ∫ dx A ∂y ∂z A⎝ -V(x) ⎞ ⎟ dA = 0 ⎠ − dV + ∫ (σ yz n y + σ zz nz ) ds = 0 dx v C Tz( n ) n Tz( n ) z y ( ) T z v∫ ds = qz ( x ) n C applied force/unit length in zdirection dV = qz ( x ) dx Last remaining equilibrium equation is: ∂σ xy ∂x + ∂σ yy ∂y Integrating over A gives + ∂σ yz ∂z =0 ⎛ ∂σ yy ∂σ yz d dA + + σ ⎜ xy ∫ ∫ dx A ∂y ∂z A⎝ ⎞ ⎟ dA = 0 ⎠ Vy dVy dx + v∫ (σ yy n y + σ yz nz ) ds = 0 C Ty( n ) ( ) T y v∫ ds = q y ( x ) n ( n) n Ty C z y Vy applied force/unit length in ydirection dVy dx = −q y ( x ) which is identically satisfied if Vy = 0, Ty( ) = 0 n Timoshenko Beam Theory A ψ z D dw C dx M neutral axis M x B ψ u x = − zψ ( x ) dψ dx ⎛ ∂u ∂u σ xz = G ⎜ x + z ∂x ⎝ ∂z ψ ( x) ≠ dw dx dw dx σ xx = − E z dw ⎞ ⎞ ⎛ = − ψ + G x ( ) ⎜ ⎟ ⎟ dx ⎠ ⎝ ⎠ better than Euler/Bernoulli but still a constant across the cross-section so introduce a form factor κ 2 σ xx = − E z dψ dx dw ⎞ ⎛ ⎟ dx ⎠ ⎝ = σ zz = σ xy = σ yz = 0 σ xz = κ 2G ⎜ −ψ ( x ) + σ yy For bending moment and shear force M = − ∫ zσ xx dA = E A dψ dx 2 z ∫ dA = EI A dψ dx dw ⎞ ⎛ V = − ∫ σ xz dA = −κ 2G ⎜ −ψ + ⎟ ∫ dA dx ⎠ A ⎝ A dw ⎞ ⎛ = −κ 2G ⎜ −ψ + ⎟ A = −σ xz A dx ⎠ ⎝ Timoshenko Beam theory dψ M = EI dx V ( x) dw −ψ ( x ) = − 2 dx κ GA Example: Euler-Bernoulli Theory d 2w M = EI 2 dx dw ψ= dx P P x M = - Px dψ = − Px dx Px 2 + C1 EIψ = − 2 x L V=-P EI ψ ( L) = 0 ⇒ ψ = This gives σ xx = Pxz I P ⎡⎣ L2 − x 2 ⎤⎦ rotation of the beam cross-section 2 EI (same as ordinary beam theory) dw V =− 2 +ψ slope of neutral axis κ GA dx P ( L2 − x 2 ) P = 2 + κ GA 2 EI Integrating P ( L2 x − x3 / 3) Px + + C2 w= 2 κ GA 2 EI PL PL3 + + C2 = 0 w( L) = 0 ⇒ 2 κ GA 3EI which gives PL3 PL C2 = w(0) = − − 2 3EI κ GA deflection due to: − PL3 w ( 0) = 3EI 3E I ⎤ ⎡ + 1 ⎢⎣ κ 2G AL2 ⎥⎦ For a rectangular section of base b and height h I 1 ⎛h⎞ = ⎜ ⎟ AL2 12 ⎝ L ⎠ 2 bending shear