J P E n a l
advertisement

J
Electr
on
i
o
u
rn
al
o
f
P
c
r
o
ba
bility
Vol. 15 (2010), Paper no. 21, pages 654–683.
Journal URL
http://www.math.washington.edu/~ejpecp/
On the critical point of the Random Walk Pinning Model in
dimension d = 3∗
Quentin Berger
Fabio Lucio Toninelli
Laboratoire de Physique, ENS Lyon
Université de Lyon
46 Allée d’Italie, 69364 Lyon, France
e-mail: quentin.berger@ens.fr
CNRS and Laboratoire de Physique, ENS Lyon
Université de Lyon
46 Allée d’Italie, 69364 Lyon, France
e-mail: fabio-lucio.toninelli@ens-lyon.fr
Abstract
We consider the Random Walk Pinning Model studied in [3] and [2]: this is a random walk X on
Zd , whose law is modified by the exponential of β times L N (X , Y ), the collision local time up to
time N with the (quenched) trajectory Y of another d-dimensional random walk. If β exceeds a
certain critical value βc , the two walks stick together for typical Y realizations (localized phase).
A natural question is whether the disorder is relevant or not, that is whether the quenched and
annealed systems have the same critical behavior. Birkner and Sun [3] proved that βc coincides
with the critical point of the annealed Random Walk Pinning Model if the space dimension is
d = 1 or d = 2, and that it differs from it in dimension d ≥ 4 (for d ≥ 5, the result was proven
also in [2]). Here, we consider the open case of the marginal dimension d = 3, and we prove
non-coincidence of the critical points.
Key words: Pinning Models, Random Walk, Fractional Moment Method, Marginal Disorder.
AMS 2000 Subject Classification: Primary 82B44, 60K35, 82B27, 60K37.
Submitted to EJP on December 15, 2009, final version accepted April 11, 2010.
∗
This work was supported by the European Research Council through the “Advanced Grant” PTRELSS 228032, and by
ANR through the grant LHMSHE
654
1 Introduction
We consider the Random Walk Pinning Model (RWPM): the starting point is a zero-drift random
walk X on Zd (d ≥ 1), whose law is modified by the presence of a second random walk, Y . The
trajectory of Y is fixed (quenched disorder) and can be seen as the random medium. The modification of the law of X due to the presence of Y takes the Boltzmann-Gibbs form of the exponential of a certain
P interaction parameter, β, times the collision local time of X and Y up to time N ,
L N (X , Y ) := 1≤n≤N 1{X n =Yn } . If β exceeds a certain threshold value βc , then for almost every realization of Y the walk X sticks together with Y , in the thermodynamic limit N → ∞. If on the other
hand β < βc , then L N (X , Y ) is o(N ) for typical trajectories.
Averaging with respect to Y the partition function, one obtains the partition function of the socalled annealed model, whose critical point βcann is easily computed; a natural question is whether
βc 6= βcann or not. In the renormalization group language, this is related to the question whether
disorder is relevant or not. In an early version of the paper [2], Birkner et al. proved that βc 6= βcann
in dimension d ≥ 5. Around the same time, Birkner and Sun [3] extended this result to d = 4, and
also proved that the two critical points do coincide in dimensions d = 1 and d = 2.
The dimension d = 3 is the marginal dimension in the renormalization group sense, where not even
heuristic arguments like the “Harris criterion” (at least its most naive version) can predict whether
one has disorder relevance or irrelevance. Our main result here is that quenched and annealed
critical points differ also in d = 3.
For a discussion of the connection of the RWPM with the “parabolic Anderson model with a single
catalyst”, and of the implications of βc 6= βcann about the location of the weak-to-strong transition
for the directed polymer in random environment, we refer to [3, Sec. 1.2 and 1.4].
Our proof is based on the idea of bounding the fractional moments of the partition function, together
with a suitable change of measure argument. This technique, originally introduced in [6; 9; 10] for
the proof of disorder relevance for the random pinning model with tail exponent α ≥ 1/2, has also
proven to be quite powerful in other cases: in the proof of non-coincidence of critical points for
the RWPM in dimension d ≥ 4 [3], in the proof that “disorder is always strong” for the directed
polymer in random environment in dimension (1 + 2) [12] and finally in the proof that quenched
and annealed large deviation functionals for random walks in random environments in two and
three dimensions differ [15]. Let us mention that for the random pinning model there is another
method, developed by Alexander and Zygouras [1], to prove disorder relevance: however, their
method fails in the marginal situation α = 1/2 (which corresponds to d = 3 for the RWPM).
To guide the reader through the paper, let us point out immediately what are the novelties and the
similarities of our proof with respect to the previous applications of the fractional moment/change
of measure method:
• the change of measure chosen by Birkner and Sun in [3] consists essentially in correlating
positively each increment of the random walk Y with the next one. Therefore, under the
modified measure, Y is more diffusive. The change of measure we use in dimension three has
also the effect of correlating positively the increments of Y , but in our case the correlations
have long range (the correlation between the i th and the j th increment decays like |i − j|−1/2 ).
Another ingredient which was absent in [3] and which is essential in d = 3 is a coarse-graining
step, of the type of that employed in [14; 10];
655
• while the scheme of the proof of our Theorem 2.8 has many points in common with that of
[10, Th. 1.7], here we need new renewal-type estimates (e.g. Lemma 4.7) and a careful
application of the Local Limit Theorem to prove that the average of the partition function
under the modified measure is small (Lemmas 4.2 and 4.3).
2 Model and results
2.1 The random walk pinning model
Let X = {X n }n≥0 and Y = {Yn }n≥0 be two independent discrete-time random walks on Zd , d ≥ 1,
starting from 0, and let PX and PY denote their respective laws. We make the following assumption:
Assumption 2.1. The random walk X is aperiodic. The increments (X i − X i−1 )i≥1 are i.i.d., sym
metric and have a finite fourth moment (EX kX 1 k4 < ∞, where k · k denotes the Euclidean norm
on Zd ). Moreover, the covariance matrix of X 1 , call it ΣX , is non-singular.
The same assumptions hold for the increments of Y (in that case, we call ΣY the covariance matrix
of Y1 ).
For β ∈ R, N ∈ N and for a fixed realization of Y we define a Gibbs transformation of the path
β
measure PX : this is the polymer path measure PN ,Y , absolutely continuous with respect to PX , given
by
β
dPN ,Y
eβ L N (X ,Y ) 1{X N =YN }
,
(1)
(X ) =
β
dP X
ZN ,Y
where L N (X , Y ) =
N
P
n=1
1{X n =Yn } , and where
β
ZN ,Y = EX [eβ L N (X ,Y ) 1{X N =YN } ]
(2)
β
is the partition function that normalizes PN ,Y to a probability.
The quenched free energy of the model is defined by
F (β) := lim
N →∞
1
N
1
β
log ZN ,Y = lim
N →∞
N
β
EY [log ZN ,Y ]
(3)
(the existence of the limit and the fact that it is PY -almost surely constant and non-negative is proven
β
in [3]). We define also the annealed partition function EY [ZN ,Y ], and the annealed free energy:
F ann (β) := lim
1
N →∞
N
β
log EY [ZN ,Y ].
(4)
We can compare the quenched and annealed free energies, via the Jensen inequality:
F (β) = lim
N →∞
1
N
β
EY [log ZN ,Y ] 6 lim
N →∞
1
N
β
log EY [ZN ,Y ] = F ann (β).
(5)
The properties of F ann (·) are well known (see the Remark 2.3), and we have the existence of critical
points [3], for both quenched and annealed models, thanks to the convexity and the monotonicity of
the free energies with respect to β:
656
Definition 2.2 (Critical points). There exist 0 6 βcann 6 βc depending on the laws of X and Y such
that: F ann (β) = 0 if β 6 βcann and F ann (β) > 0 if β > βcann ; F (β) = 0 if β 6 βc and F (β) > 0 if
β > βc .
The inequality βcann 6 βc comes from the inequality (5).
Remark 2.3. As was remarked in [3], the annealed model is just the homogeneous pinning model
[8, Chapter 2] with partition function
!
N
X
β
Y
X −Y
1{(X −Y )n =0} 1{(X −Y )N =0}
E [ZN ,Y ] = E
exp β
n=1
which describes the random walk X − Y which receives the reward β each time it hits 0. From the
well-known results on the homogeneous pinning model one sees therefore that
• If d = 1 or d = 2, the annealed critical point βcann is zero because the random walk X − Y is
recurrent.
• If d ≥ 3, the walk X − Y is transient and as a consequence
βcann = − log 1 − PX −Y (X − Y )n 6= 0 for every n > 0 > 0.
Remark 2.4. As in the pinning model [8], the critical point βc marks the transition from a delocalized to a localized regime. We observe that thanks to the convexity of the free energy,
N
X
1
β
∂β F (β) = lim EN ,Y
(6)
1{X N =YN } ,
N →∞
N n=1
almost surely in Y , for every β such that F (·) is differentiable at β. This is the contact fraction
between X and Y . When β < βc , we have F (β) = 0, and the limit density of contact between X and
β PN
Y is equal to 0: EN ,Y n=1 1{X N =YN } = o(N ), and we are in the delocalized regime. On the other
hand, if β > βc , we have F (β) > 0, and there is a positive density of contacts between X and Y : we
are in the localized regime.
2.2 Review of the known results
The following is known about the question of the coincidence of quenched and annealed critical
points:
Theorem 2.5. [3] Assume that X and Y are discrete time simple random walks on Zd .
If d = 1 or d = 2, the quenched and annealed critical points coincide: βc = βcann = 0.
If d ≥ 4, the quenched and annealed critical points differ: βc > βcann > 0.
Actually, the result that Birkner and Sun obtained in [3] is valid for slightly more general walks than
simple symmetric random walks, as pointed out in the last Remark in [3, Sec.4.1]: for instance,
they allow symmetric walks X and Y with common jump kernel and finite variance, provided that
PX (X 1 = 0) ≥ 1/2.
In dimension d ≥ 5, the result was also proven (via a very different method, and for more general
random walks which include those of Assumption 2.1) in an early version of the paper [2].
657
Remark 2.6. The method and result of [3] in dimensions d = 1, 2 can be easily extended beyond
the simple random walk case (keeping zero mean and finite variance). On the other hand, in the
case d ≥ 4 new ideas are needed to make the change-of-measure argument of [3] work for more
general random walks.
Birkner and Sun gave also a similar result if X and Y are continuous-time symmetric simple random
walks on Zd , with jump rates 1 and ρ ≥ 0 respectively. With definitions of (quenched and annealed)
free energy and critical points which are analogous to those of the discrete-time model, they proved:
Theorem 2.7. [3] In dimension d = 1 and d = 2, one has βc = βcann = 0. In dimensions d ≥ 4, one
has 0 < βcann < βc for each ρ > 0. Moreover, for d = 4 and for each δ > 0, there exists aδ > 0 such
that βc − βcann ≥ aδ ρ 1+δ for all ρ ∈ [0, 1]. For d ≥ 5, there exists a > 0 such that βc − βcann ≥ aρ for
all ρ ∈ [0, 1].
Our main result completes this picture, resolving the open case of the critical dimension d = 3 (for
simplicity, we deal only with the discrete-time model).
Theorem 2.8. Under the Assumption 2.1, for d = 3, we have βc > βcann .
We point out that the result holds also in the case where X (or Y ) is a simple random walk, a case
which a priori is excluded by the aperiodicity condition of Assumption 2.1; see the Remark 2.11.
Also, it is possible to modify our change-of-measure argument to prove the non-coincidence of
quenched and annealed critical points in dimension d = 4 for the general walks of Assumption 2.1,
thereby extending the result of [3]; see Section 4.4 for a hint at the necessary steps.
Note After this work was completed, M. Birkner and R. Sun informed us that in [4] they independently proved Theorem 2.8 for the continuous-time model.
β
2.3 A renewal-type representation for ZN ,Y
From now on, we will assume that d ≥ 3.
β
As discussed in [3], there is a way to represent the partition function ZN ,Y in terms of a renewal
process τ; this rewriting makes the model look formally similar to the random pinning model [8].
In order to introduce the representation of [3], we need a few definitions.
Definition 2.9. We let
1. pnX (x) = PX (X n = x) and pnX −Y (x) = PX −Y (X − Y )n = x ;
2. P be the law of a recurrent renewal τ = {τ0 , τ1 , . . .} with τ0 = 0, i.i.d. increments and interarrival law given by
K(n) := P(τ1 = n) =
pnX −Y (0)
G X −Y
(note that G X −Y < ∞ in dimension d ≥ 3);
3. z ′ = (eβ − 1) and z = z ′ G X −Y ;
658
where G
X −Y
:=
∞
X
n=1
pnX −Y (0)
(7)
4. for n ∈ N and x ∈ Zd ,
w(z, n, x) = z
5. ŽNz ,Y :=
pnX (x)
pnX −Y (0)
;
(8)
β
z′
Z .
1+z ′ N ,Y
Then, via the binomial expansion of eβ L N (X ,Y ) = (1 + z ′ ) L N (X ,Y ) one gets [3]
ŽNz ,Y
=
N
X
X
m
Y
m=1 τ0 =0<τ1 <...<τm =N i=1
K(τi − τi−1 )w(z, τi − τi−1 , Yτi − Yτi−1 )
(9)
= E W (z, τ ∩ {0, . . . , N }, Y )1N ∈τ ,
where we defined for any finite increasing sequence s = {s0 , s1 , . . . , sl }
Q
l
l
X
=
Y
z1
EX
Y
s0
s0
{X sn =Ysn }
n=1
=
Q
w(z, sn − sn−1 , Ysn − Ysn−1 ).
W (z, s, Y ) =
l
X
−Y
n=1
E
n=1 1{X s =Ys } X s0 = Ys0
n
(10)
n
We remark that, taking the EY −expectation of the weights, we get
EY w(z, τi − τi−1 , Yτi − Yτi−1 ) = z.
Again, we see that the annealed partition function is the partition function of a homogeneous pinning
model:
z,ann
ŽN ,Y = EY [ ŽNz ,Y ] = E z R N 1{N ∈τ} ,
(11)
where we defined R N := |τ ∩ {1, . . . , N }|.
Since the renewal τ is recurrent, the annealed critical point is zcann = 1.
In the following, we will often use the Local Limit Theorem for random walks, that one can find for
instance in [5, Theorem 3] (recall that we assumed that the increments of both X and Y have finite
second moments and non-singular covariance matrix):
Proposition 2.10 (Local Limit Theorem). Under the Assumption 2.1, we get
1
1
−1
PX (X n = x) =
x
·
Σ
x
+ o(n−d/2 ),
exp
−
X
d/2
1/2
2n
(2πn) (det ΣX )
(12)
where o(n−d/2 ) is uniform for x ∈ Zd .
Moreover, there exists a constant c > 0 such that for all x ∈ Zd and n ∈ N
PX (X n = x) 6 cn−d/2 .
Similar statements hold for the walk Y .
659
(13)
(We use the notation x · y for the canonical scalar product in Rd .)
In particular, from Proposition 2.10 and the definition of K(·) in (7), we get K(n) ∼ cK n−d/2 as
n → ∞, for some positive cK . As a consequence, for d = 3 we get from [7, Th. B] that
n→∞
P(n ∈ τ) ∼
1
p .
2πcK n
(14)
Remark 2.11. In Proposition 2.10, we supposed that the walk X is aperiodic, which is not the case
for the simple random walk. If X is the symmetric simple random walk on Zd , then [13, Prop. 1.2.5]
1
2
−1
X
P (X n = x) = 1{n↔x}
+ o(n−d/2 ),
(15)
exp − x · ΣX x
2n
(2πn)d/2 (det ΣX )1/2
where +o(n−d/2 ) is uniform for x ∈ Zd , and where n ↔ x means that n and x have the same parity
(so that x is a possible value for X n ). Of course, in this case ΣX is just 1/d times the identity matrix.
The statement (13) also holds.
Via this remark, one can adapt all the computations of the following sections, which are based on
Proposition 2.10, to the case where X (or Y ) is a simple random walk. For simplicity of exposition,
we give the proof of Theorem 2.8 only in the aperiodic case.
3 Main result: the dimension d = 3
With the definition F̌ (z) := limN →∞
F̌ (z) = 0 for some z > 1.
1
N
log ŽNz ,Y , to prove Theorem 2.8 it is sufficient to show that
3.1 The coarse-graining procedure and the fractional moment method
We consider without loss of generality a system of size proportional to L =
length), that is N = mL, with m ∈ N. Then, for I ⊂ {1, . . . , m}, we define
I
Zz,Y
:= E W (z, τ ∩ {0, . . . , N }, Y )1N ∈τ 1 EI (τ) ,
1
z−1
(the coarse-graining
(16)
where EI is the event that the renewal τ intersects the blocks (Bi )i∈I and only these blocks over
{1, . . . , N }, Bi being the i th block of size L:
Bi := {(i − 1)L + 1, . . . , i L}.
Since the events EI are disjoint, we can write
ŽNz ,Y :=
X
I
Zz,Y
.
(17)
(18)
I ⊂{1,...,m}
I
Note that Zz,Y
= 0 if m ∈
/ I . We can therefore assume m ∈ I . If we denote I = {i1 , i2 , . . . , il }
I
(l = |I |), i1 < . . . < il , il = m, we can express Zz,Y
in the following way:
660
I
Zz,Y
X
:=
X
...
X
K(a1 )w(z, a1 , Ya1 )Zaz
(19)
1 ,b1
al ∈Bil
a1 ,b1 ∈Bi1 a2 ,b2 ∈Bi2
a1 6 b1 a2 6 b2
. . . K(al − bl−1 )w(z, al − bl−1 , Yal − Ybl−1 )Zaz ,N ,
l
where
Z zj,k := E W (z, τ ∩ { j, . . . , k}, Y )1k∈τ j ∈ τ
(20)
is the partition function between j and k.
a1
0
b1
2L
L
a 2 b2
a3
3L
4L
a 4 b4 = N
b3
5L
6L
7L
8L = N
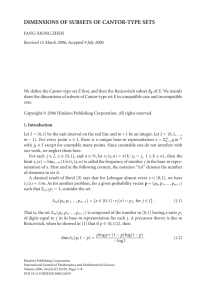
Figure 1: The coarse-graining procedure. Here N = 8L (the system is cut into 8 blocks), and
I = {2, 3, 6, 8} (the gray zones) are the blocks where the contacts occur, and where the change of
measure procedure of the Section 3.2 acts.
Moreover, thanks to the Local Limit Theorem (Proposition 2.10), one can note that there exists a
constant c > 0 independent of the realization of Y such that, if one takes z 6 2 (we will take z close
to 1 anyway), one has
w(z, τi − τi−1 , Yτi − Yτi−1 ) = z
So, the decomposition (19) gives
X
X
X
I
Zz,Y
6 c |I |
...
K(a1 )Zaz
a1 ,b1 ∈Bi1 a2 ,b2 ∈Bi2
a1 6 b1 a2 6 b2
1 ,b1
al ∈Bil
pτX −τ
i
i−1
(Yτi − Yτi−1 )
pτXi−Y
−τi−1 (0)
K(a2 − b1 )Zaz
2 ,b2
≤ c.
. . . K(al − bl−1 )Zaz ,N .
l
(21)
We now eliminate the dependence on z in the inequality (21). This is possible thanks to the choice
1
. As each Zaz ,b is the partition function of a system of size smaller than L, we get W (z, τ ∩
L = z−1
i
i
{ai , . . . , bi }, Y ) 6 z L W (z = 1, τ ∩ {ai , . . . , bi }, Y ) (recall the definition (10)). But with the choice
1
L = z−1
, the factor z L is bounded by a constant c, and thanks to the equation (20), we finally get
Zaz ,b 6 cZaz=1
,b .
i
i
i
i
(22)
Notational warning: in the following, c, c ′ , etc. will denote positive constants, whose value may
change from line to line.
and W (τ, Y ) := W (z = 1, τ, Y ). Plugging this in the inequality (21), we
We note Zai ,bi := Zaz=1
i ,bi
finally get
X
X
X
I
Zz,Y
6 c ′|I |
K(a1 )Za1 ,b1 K(a2 − b1 )Za2 ,b2 . . . K(al − bl−1 )Zal ,N ,
(23)
...
a1 ,b1 ∈Bi1 a2 ,b2 ∈Bi2
a1 6 b1 a2 6 b2
al ∈Bil
661
where there is no dependence on z anymore.
The fractional moment method starts from the observation that for any γ 6= 0
F̌ (z) = lim
N →∞
1
γN
E
Y
log
ŽNz ,Y
γ
6 lim inf
N →∞
1
Nγ
log E
Y
ŽNz ,Y
γ
.
(24)
Let us fix a value of γ ∈ (0, 1) (as in [10], we willPchoose γ P
= 6/7, but we will keep writing it as
γ
γ
an (which is valid for ai ≥ 0), and
γ to simplify the reading). Using the inequality
an 6
combining with the decomposition (18), we get
γ
γ
X
I
EY
ŽNz ,Y
6
EY
Zz,Y
.
(25)
I ⊂{1,...,m}
Thanks to (24) we only have to prove that, for some z > 1, lim supN →∞ EY
h
i
I γ
We deal with the term EY (Zz,Y
) via a change of measure procedure.
ŽNz ,Y
γ
< ∞.
3.2 The change of measure procedure
The idea is to change the measure PY on each block whose index belongs to I , keeping each block
independent of the others. We replace, for fixed I , the measure PY ( dY ) with gI (Y )PY ( dY ), where
the function gI (Y ) will have the effect of creating long range positive correlations between the
increments of Y , inside each block separately. Then, thanks to the Hölder inequality, we can write
h
iγ
h
γ
γ i
gI (Y )γ I γ
− 1−γ 1−γ Y
I
Y
Y
I
Y
E
g
(Y
)Z
. (26)
Z
6
E
g
(Y
)
E
Zz,Y
=E
I
I
z,Y
z,Y
gI (Y )γ
In the following, we will denote ∆i = Yi − Yi−1 the i th increment of Y . Let us introduce, for K > 0
and ǫK to be chosen, the following “change of measure”:
Y
Y
gI (Y ) =
(1 Fk (Y ) 6 K + ǫK 1 Fk (Y )>K ) ≡
g k (Y ),
(27)
k∈I
k∈I
where
Fk (Y ) = −
and
X
i, j∈Bk
Mi j ∆i · ∆ j ,
(28)
Mi j = p
M = 0.
ii
1
Æ 1
L log L | j−i |
if i 6= j
(29)
P
Let us note that from the form of M , we get that kM k2 := i, j∈B1 Mi2j 6 C, where the constant
C < ∞ does not depend on L. We also note that Fk only depends on the increments of Y in the
block labeled k.
662
Let us deal with the first factor of (26):
E
Y
h
γ
gI (Y )
− 1−γ
i
=
Y
E
Y
h
γ
g k (Y )
− 1−γ
i
=
γ
− 1−γ
Y
P (F1 (Y ) 6 K) + ǫK
Y
P (F1 (Y ) > K)
|I |
.
(30)
k∈I
We now choose
ǫK := PY (F1 (Y ) > K)
1−γ
γ
(31)
such that the first factor in (26) is bounded by 2(1−γ)|I | 6 2|I | . The inequality (26) finally gives
γ
h
iγ
I
I
EY
Zz,Y
6 2|I | EY gI (Y )Zz,Y
.
(32)
The idea is that when F1 (Y ) is large, the weight g1 (Y ) in the change of measure is small. That is
why the following lemma is useful:
Lemma 3.1. We have
lim lim sup ǫK = lim lim sup PY (F1 (Y ) > K) = 0
K→∞
K→∞
L→∞
(33)
L→∞
Proof . We already know that EY [F1 (Y )] = 0, so thanks to the standard Chebyshev inequality, we
only have to prove that EY [F1 (Y )2 ] is bounded uniformly in L. We get
X
EY [F1 (Y )2 ] =
Mi j Mkl EY (∆i · ∆ j )(∆k · ∆l )
i, j∈B1
k,l∈B1
=
X
{i, j}
Mi2j EY (∆i · ∆ j )2
(34)
where we used that EY (∆i · ∆ j )(∆k · ∆l ) = 0 if {i, j} =
6 {k, l}. Then, we can use the CauchySchwarz inequality to get
h i
X
2
2
2
EY [F1 (Y )2 ] 6
(35)
Mi2j EY ∆i ∆ j 6 kM k2 σ4Y := kM k2 EY (||Y1 ||2 ) .
{i, j}
i
h
I
. We set PI := P EI , N ∈ τ , that is the probWe are left with the estimation of EY gI (Y )Zz,Y
ability for τ to visit the blocks (Bi )i∈I and only these ones, and to visit also N . We now use the
following two statements.
Proposition 3.2. For any η > 0, there exists z > 1 sufficiently close to 1 (or L sufficiently big, since
L = (z − 1)−1 ) such that for every I ⊂ {1, . . . , m} with m ∈ I , we have
h
i
I
EY gI (Y )Zz,Y
6 η|I | PI .
(36)
Proposition 3.2 is the core of the paper and is proven in the next section.
663
Lemma 3.3. [10, Lemma 2.4] There exist three constants C1 = C1 (L), C2 and L0 such that (with
i0 := 0)
|I |
Y
1
|I |
PI 6 C1 C2
(37)
7/5
(i
−
i
)
j
j−1
j=1
for L ≥ L0 and for every I ∈ {1, . . . , m}.
Thanks to these two statements and combining with the inequalities (25) and (32), we get
EY
ŽNz ,Y
γ
X
EY
6
I
Zz,Y
γ
X
γ
6 C1
|I |
Y
I ⊂{1,...,m} j=1
I ⊂{1,...,m}
(3C2 η)γ
(i j − i j−1 )7γ/5
.
(38)
Since 7γ/5 = 6/5 > 1, we can set
e (n) =
K
1
e
c n6/5
, where e
c=
+∞
X
i −6/5 < +∞,
(39)
i=1
e (·) is the inter-arrival probability of some recurrent renewal τ
e. We can therefore interpret
and K
the right-hand side of (38) as a partition function of a homogeneous pinning model of size m (see
e, and with pinning parameter log[e
Figure 2), with the underlying renewal τ
c (3C2 η)γ ]:
h
γ
|eτ∩{1,...,m}| i
γ
.
(40)
EY
6 C1 Eτe ec (3C2 η)γ
ŽNz ,Y
0
1
2
3
4
5
6
7
8=m
e is a subset of the set of blocks (Bi )1 6 i 6 m (i.e the blocks are
Figure 2: The underlying renewal τ
e (n) = 1/ e
c n6/5 .
reinterpreted as points) and the inter-arrival distribution is K
Thanks to Proposition 3.2, we can take η arbitrary small. Let us fix η := 1/((4C2 )e
c 1/γ ). Then,
γ
γ
Y
z
6 C1
(41)
E
ŽN ,Y
for every N . This implies, thanks to (24), that F̌ (z) = 0, and we are done.
Remark 3.4. The coarse-graining procedure reduced the proof of delocalization to the proof of
Proposition 3.2. Thanks to the inequality (23), one has to estimate the expectation, with respect to
the gI (Y )−modified measure, of the partition functions Zai ,bi in each visited block. We will show
(this is Lemma 4.1) that the expectation with respect to this modified measure of Zai ,bi /P(bi −ai ∈ τ)
can be arbitrarily small if L is large, and if bi − ai is of the order of L. If bi − ai is much smaller, we
can deal with this term via elementary bounds.
664
4 Proof of the Proposition 3.2
As pointed out in Remark 3.4, Proposition 3.2 relies on the following key lemma:
Lemma 4.1. For every ǫ and δ > 0, there exists L > 0 such that
EY g1 (Y )Za,b 6 δP(b − a ∈ τ)
(42)
for every a 6 b in B1 such that b − a ≥ ǫ L.
Given this lemma, the proof of Proposition 3.2 is very similar to the proof of [10, Proposition 2.3],
so we will sketch only a few steps. The inequality (23) gives us
h
i
I
EY gI (Y )Zz,Y
X
X
X
6 c |I |
...
K(a1 )EY g i1 (Y )Za1 ,b1 K(a2 − b1 )EY g i2 (Y )Za2 ,b2 . . .
=
a1 ,b1 ∈Bi1 a2 ,b2 ∈Bi2
a1 6 b1 a2 6 b2
al ∈Bil
a1 ,b1 ∈Bi1 a2 ,b2 ∈Bi2
a1 6 b1 a2 6 b2
al ∈Bil
. . . K(al − bl−1 )EY g il (Y )Zal ,N
X
X
X
c |I |
K(a1 )EY g1 (Y )Za1 −L(i1 −1),b1 −L(i1 −1) K(a2 − b1 ) . . .
...
(43)
. . . K(al − bl−1 )EY g1 (Y )Zal −L(m−1),N −L(m−1) .
The terms with bi − ai ≥ ǫ L are dealt with via Lemma 4.1, while for the remaining ones we just
observe that EY [g1 (Y )Za,b ] ≤ P(b − a ∈ τ) since g1 (Y ) ≤ 1. One has then
h
i
I
EY gI (Y )Zz,Y
6
c |I |
X
X
a1 ,b1 ∈Bi1 a2 ,b2 ∈Bi2
a1 6 b1 a2 6 b2
...
X
al ∈Bil
K(a1 ) δ + 1{b1 −a1 6 ǫ L} P(b1 − a1 ∈ τ)
. . . K(al − bl−1 ) δ + 1{N −al 6 ǫ L} P(N − al ∈ τ).
(44)
From this point on, the proof of Theorem 3.2 is identical to the proof of Proposition 2.3 in [10] (one
needs of course to choose ǫ = ǫ(η) and δ = δ(η) sufficiently small).
4.1 Proof of Lemma 4.1
Let us fix a, b in B1 , such that b − a ≥ ǫ L. The small constants δ and ǫ are also fixed. We recall that
for a fixed configuration of τ such that a, b ∈ τ, we have EY W (τ ∩ {a, . . . , b}, Y ) = 1 because
z = 1. We can therefore introduce the probability measure (always for fixed τ)
dPτ (Y ) = W (τ ∩ {a, . . . , b}, Y ) dPY (Y )
(45)
where we do not indicate the dependence on a and b. Let us note for later convenience that, in the
particular case a = 0, the definition (10) of W implies that for any function f (Y )
Eτ [ f (Y )] = EX EY f (Y )|X i = Yi ∀i ∈ τ ∩ {1, . . . , b} .
665
(46)
z=1
With the definition (20) of Za,b := Za,b
, we get
bEτ [g1 (Y )]P(b − a ∈ τ), (47)
EY g1 (Y )Za,b = EY E g1 (Y )W (τ ∩ {a, . . . , b}, Y )1 b∈τ |a ∈ τ = E
b := P(·|a, b ∈ τ), and therefore we have to show that E
bEτ [g1 (Y )] 6 δ.
where P(·)
With the definition (27) of g1 (Y ), we get that for any K
bEτ [g1 (Y )] 6 ǫK + E
bPτ F1 < K .
E
(48)
If we choose K big enough, ǫK is smaller than δ/3 thanks to the Lemma 3.1. We now use two lemmas
b
to deal with the second term. The idea is to first prove that Eτ [F1 ] is big with a P−probability
close
to 1, and then that its variance is not too large.
Lemma 4.2. For every ζ > 0 and ǫ > 0, one can find two constants u = u(ǫ, ζ) > 0 and L0 =
L0 (ǫ, ζ) > 0, such that for every a, b ∈ B1 such that b − a ≥ ǫ L,
p
b Eτ [F1 ] ≤ u log L ≤ ζ,
P
(49)
for every L ≥ L0 .
p
Choose ζ = δ/3 and fix u > 0 such that (49) holds for every L sufficiently large. If 2K = u log L
(and therefore we can make ǫK small enough by choosing L large), we get that
bPτ F1 < K
E
b Eτ [F1 ] 6 2K
bPτ F1 − Eτ [F1 ] 6 − K + P
E
1
bEτ F1 − Eτ [F1 ] 2 + δ/3.
E
2
K
6
6
(50)
(51)
Putting this together with (48) and with our choice of K, we have
bEτ [g1 (Y )] 6 2δ/3 +
E
4
bEτ
E
F1 − Eτ [F1 ]
2
u2 log L
bEτ F1 − Eτ [F1 ] 2 = o(log L). Indeed,
for L ≥ L0 . Then we just have to prove that E
(52)
Lemma 4.3. For every ǫ > 0 there exists some constant c = c(ǫ) > 0 such that
bEτ
E
F1 − Eτ [F1 ]
2
6 c log L
3/4
(53)
for every L > 1 and a, b ∈ B1 such that b − a ≥ ǫ L.
We finally get that
bEτ [g1 (Y )] 6 2δ/3 + c(log L)−1/4 ,
E
(54)
and there exists a constant L1 > 0 such that for L > L1
bEτ [g1 (Y )] 6 δ.
E
666
(55)
4.2 Proof of Lemma 4.2
Up to now, the proof of Theorem 2.8 is quite similar to the proof of the main result in [10]. Starting
from the present section, instead, new ideas and technical results are needed.
b and
Let us fix a realization of τ such that a, b ∈ τ (so that it has a non-zero probability under P)
let us note τ ∩ {a, . . . b} = {τR a = a, τR a +1 , . . . , τR b = b} (recall that R n = |τ ∩ {1, . . . , n}|). We
observe (just go back to the definition of Pτ ) that, if f is a function of the increments of Y in
{τn−1 + 1, . . . , τn }, g of the increments in {τm−1 + 1, . . . , τm } with R a < n 6= m ≤ R b , and if h is a
function of the increments of Y not in {a + 1, . . . , b} then
(56)
Eτ f {∆i }i∈{τn−1 +1,...,τn } g {∆i }i∈{τm−1 +1,...,τm } h {∆i }i ∈{a+1,...,b}
/
Y ,
= Eτ f {∆i }i∈{τn−1 +1,...,τn } Eτ g {∆i }i∈{τm−1 +1,...,τm } E h {∆i }i ∈{a+1,...,b}
/
and that
Eτ f {∆i }i∈{τn−1 +1,...,τn } = EX EY f {∆i }i∈{τn−1 +1,...,τn } |X τn−1 = Yτn−1 , X τn = Yτn
= EX EY f {∆i−τn−1 }i∈{τn−1 +1,...,τn } |X τn −τn−1 = Yτn −τn−1 .
(57)
We want to estimate Eτ [F1 ]: since the increments ∆i for i ∈ B1 \{a+1, . . . , b} are i.i.d. and centered
(like under PY ), we have
b
X
Mi j Eτ [−∆i · ∆ j ].
(58)
Eτ [F1 ] :=
i, j=a+1
Via a time translation, one can always assume that a = 0 and we do so from now on.
The key point is the following
Lemma 4.4.
1. If there exists 1 ≤ n ≤ R b such that i, j ∈ {τn−1 + 1, . . . , τn }, then
r→∞
Eτ [−∆i · ∆ j ] = A(r) ∼
CX ,Y
r
(59)
where r = τn − τn−1 (in particular, note that the expectation depends only on r) and CX ,Y is a
positive constant which depends on PX , PY ;
2. otherwise, Eτ [−∆i · ∆ j ] = 0.
Proof of Lemma 4.4 Case (2). Assume that τn−1 < i ≤ τn and τm−1 < j ≤ τm with n 6= m. Thanks
to (56)-(57) we have that
Eτ [∆i · ∆ j ] = EX EY [∆i |X τn−1 = Yτn−1 , X τn = Yτn ] · EX EY [∆ j |X τm−1 = Yτm−1 , X τm = Yτm ]
(60)
and both factors are immediately seen to be zero, since the laws of X and Y are assumed to be
symmetric.
Case (1). Without loss of generality, assume that n = 1, so we only have to compute
EY EX ∆i · ∆ j X r = Yr .
667
(61)
where r = τ1 . Let us fix x ∈ Z3 , and denote EYr,x [·] = EY [· Yr = x ].
h
i
EY [∆i · ∆ j Yr = x ] = EYr,x ∆i · EYr,x ∆ j ∆i
h i
x − ∆i
x
1
2
Y
· EYr,x ∆i −
EYr,x ∆i = E r,x ∆i ·
=
r −1
r −1
r −1
h i
1
kxk2
2
Y
=
,
− E r,x ∆1
r −1
r
where we used the fact that under PYr,x the law of the increments {∆i }i≤r is exchangeable. Then, we
get
Eτ [∆i · ∆ j ] = EX EY ∆i · ∆ j 1{Yr =X r } PX −Y (Yr = X r )−1
h
i
= EX EY ∆i · ∆ j Yr = X r PY (Yr = X r ) PX −Y (Yr = X r )−1
2
X 1
r
E X
PY (Yr = X r ) PX −Y (Yr = X r )−1
=
r −1
r
h i
2
−EX EY ∆1 1{Yr =X r } PX −Y (Yr = X r )−1
2
i
X h 1
EX r PY (Yr = X r ) PX −Y (Yr = X r )−1 − EX EY ∆1 2 Yr = X r .
=
r −1
r
Next, we study the asymptotic behavior of A(r) and we prove (59) with CX ,Y = t r(ΣY ) −
−1 −1
t r (Σ−1
+
Σ
)
. Note that t r(ΣY ) = EY (||Y1 ||2 ) = σ2Y . The fact that CX ,Y > 0 is just a conseX
Y
quence of the fact that, if A and B are two positive-definite matrices, one has that A − B is positive
definite if and only if B −1 − A−1 is [11, Cor. 7.7.4(a)].
To prove (59), it is enough to show that
h i r→∞
h i
2
2
EX EY ∆1 Yr = X r → EX EY ∆1 = σ2Y ,
and that
E
B(r) :=
X
kX r k
r
(62)
2
Y
P (Yr = X r )
PX −Y (X r = Yr )
−1 −1
→ t r (Σ−1
.
X + ΣY )
r→∞
(63)
To prove (62), write
i
i
h h 2
2
= EY ∆1 PX (X r = Yr ) PX −Y (X r = Yr )−1
EX EY ∆1 Yr = X r
=
X
y,z∈Zd
k yk2 PY (Y1 = y)
PY (Yr−1 = z)PX (X r = y + z)
.
PX −Y (X r − Yr = 0)
We know from the Local Limit Theorem (Proposition 2.10) that the term
PX (X r = y+z)
PX −Y (X r −Yr =0)
d
(64)
is uniformly
bounded from above, and so there exists a constant c > 0 such that for all y ∈ Z
X
X PY (Y
r−1 = z)P (X r = y + z)
z∈Zd
PX −Y (X r − Yr = 0)
668
6 c.
(65)
If we can show that for every y fixed Zd the left-hand side of (65) goes to 1 as r goes to infinity,
then from (64) and a dominated convergence argument we get that
i r→∞ X
h 2
k yk2 PY (Y1 = y) = σ2Y .
(66)
EX EY ∆1 Yr = X r −→
y∈Zd
We use the Local Limit Theorem to get
X
X c c
1
1
−1
X Y − 2(r−1)
z·(Σ−1
Y z ) − 2r ( y+z)·(ΣX ( y+z))
e
PY (Yr−1 = z)PX (X r = y + z) =
e
+ o(r −d/2 )
d
r
d
d
z∈Z
z∈Z
= (1 + o(1))
X c c
X Y
z∈Zd
rd
1
1
−1
−1
e− 2r z·(ΣY z ) e− 2r z·(ΣX z ) + o(r −d/2 )
(67)
where cX = (2π)−d/2 (det ΣX )−1/2 and similarly for cY (the constants are different in the case of
p
simple random walks: see Remark 2.11), and where we used that y is fixed to neglect y/ r.
Using the same reasoning, we also have (with the same constants cX and cY )
X
PY (Yr = z)PX (X r = z)
PX −Y (X r = Yr ) =
z∈Zd
=
X c c
X Y
z∈Zd
rd
1
1
−1
−1
e− 2r z·(ΣY z ) e− 2r z·(ΣX z ) + o(r −d/2 ).
(68)
Putting this together with (67) (and considering that PX −Y (X r = Yr ) ∼ cX ,Y r −d/2 ), we have, for
every y ∈ Zd
X
X PY (Y
r−1 = z)P (X r = y + z)
z∈Zd
PX −Y (X
− Yr = 0)
r
r→∞
−→ 1.
To deal with the term B(r) in (63), we apply the Local Limit Theorem as in (68) to get
2
X cY cX X kzk2 − 1 z·(Σ−1 z ) − 1 z·(Σ−1 z )
r
Y
X
EX
PY (Yr = X r ) = d
e 2r
e 2r
+ o(r −d/2 ).
r
r
r
d
(69)
(70)
z∈Z
Together with (68), we finally get
cY cX P
kzk2
B(r) =
1
−1
− 2r
z·((Σ−1
Y +ΣX )z ) + o(r −d/2 )
z∈Zd r e
rd
−1
cY cX P
− 1 z·((Σ−1
Y +ΣX )z ) + o(r −d/2 )
d e 2r
d
z∈
Z
r
= (1 + o(1))E kN k2 ,
(71)
0, (Σ−1
Σ−1
)−1 is a centered Gaussian vector of covariance matrix
Y +
X
2
−1 −1
−1 −1
(Σ−1
= t r (Σ−1
and (63) is proven.
Y + ΣX ) . Therefore, E kN k
Y + ΣX )
where N
∼ N
Remark 4.5. For later purposes, we remark that with the same methodone
can
prove that, for any
given k0 ≥ 0 and polynomials U and V of order four (so that EY [|U {∆k }k 6 k0 |] < ∞ and
p
EX [V (||X r ||/ r)] < ∞), we have
!
X
r→∞
r
E X E Y U { ∆ k } k 6 k0 V
p
Yr = X r → EY U {k∆k k}k 6 k0 E V (kN k) , (72)
r 669
where N is as in (71).
Let us quickly sketch the proof: as in (64), we can write
kX r k X Y
Y = X =
(73)
E E
U {k∆k k}k 6 k0 V
p
r
r
r X
X
PY (Yr−k0 = z − y1 − . . . − yk0 )
kzk
V p
U {k yk k}k 6 k0
PX (X r = z)
PX −Y (X r − Yr = 0)
r
d
d
y1 ,..., yk0 ∈Z
z∈Z
×PY (∆i = yi , i ≤ k0 ).
Using the Local Limit Theorem the same way as in (68) and (71), one can show that for any
y 1 , . . . , y k0
X
z∈Zd
V
kzk
p
r
PX (X r = z)
PY (Yr−k0 = z − y1 − . . . − yk0 )
PX −Y (X r − Yr = 0)
→ E V (kN k) .
r→∞
(74)
The proof of (72) is concluded via a domination argument (as for (62)), which is provided by
uniform bounds on PY (Yr−k0 = z − y1 − . . . − yk0 ) and PX −Y (X r − Yr = 0) and by the fact that the
increments of X and Y have finite fourth moments.
Given Lemma 4.4, we can resume the proof of Lemma 4.2, and lower bound the average Eτ [F1 ].
Recalling (58) and the fact that we reduced to the case a = 0, we get
Rb
X
X
(75)
Mi j A(∆τn ),
Eτ [F1 ] =
n=1
τn−1 <i, j≤τn
where ∆τn := τn − τn−1 . Using the definition (29) of M , we see that there exists a constant c > 0
such that for 1 < m ≤ L
m
X
c
m3/2 .
(76)
Mi j ≥ p
L log L
i, j=1
On the other hand, thanks to Lemma 4.4, there exists some r0 > 0 and two constants c and c ′ such
that A(r) ≥ rc for r ≥ r0 , and A(r) ≥ −c ′ for every r. Plugging this into (75), one gets
p
L log L Eτ [F1 ] ≥ c
Rb
X
p
n=1
∆τn 1{∆τn≥r0 } − c ′
Rb
X
n=1
(∆τn )3/2 1{∆τn 6r0 } ≥ c
Rb
X
p
n=1
∆τn − c ′ R b .
(77)
Therefore, we get for any positive B > 0 (independent of L)
!
Rb
X
p
p
p
1
′
b Eτ [F1 ] 6 g log L 6 P
bp
P
c
∆τn − c R b 6 u log L
L log L
n=1
!
Rb
X
p
p
p
p
1
b Rb > B L
b p
c
∆τn − c ′ LB 6 u log L + P
6 P
L log L
n=1
R b/2
X
p
p
up
b
b
∆τn ≤ (1 + o(1))
L log L + P(R
(78)
6 P
b > B L).
c
n=1
670
Now we show that for B large enough, and L ≥ L0 (B),
p
b b > B L) 6 ζ/2,
P(R
(79)
where ζ is the constant which appears in the statement of Lemma 4.2. We start with getting rid
p of
b
b
the conditioning in P (recall P(·) = P(·|b ∈ τ) since we reduced p
to the case a = 0). If R b > B L,
then either |τ ∩ {1, . . . , b/2}| or |τ ∩ {b/2 + 1, . . . , b}| exceeds B2 L. Since both random variables
b we have
have the same law under P,
p
Bp
Bp
b R b/2 >
b b > B L) 6 2P
L ≤ 2cP R b/2 >
L ,
(80)
P(R
2
2
where in the second inequality we applied Lemma A.1. Now, we can use the Lemma A.3 in the
Appendix, to get that (recall b ≤ L)
cK
Bp
Bp
|Z |
L→∞
≥ Bp
P R b/2 >
L ≤ P R L/2 >
L
→ P p
,
(81)
2
2
2π
2
with Z a standard Gaussian random variable and cK the constant such that K(n) ∼ cK n−3/2 . The
inequality (79) then follows for B sufficiently large, and L ≥ L0 (B).
We are left to prove that for L large enough and u small enough
R b/2
X
p
p
u
b
P
∆τn 6
L log L 6 ζ/2.
c
n=1
(82)
b can be eliminated again via Lemma A.1. Next, one notes that for any given
The conditioning in P
A > 0 (independent of L)
p
R b/2
A
L
X
X
p
p
p
up
up
∆τn 6
L log L 6 P
∆τn 6
L log L + P R b/2 < A L .
(83)
P
c
c
n=1
n=1
Thanks to the Lemma A.3 in Appendix and to b ≥ ǫ L, we have
r !
R b/2
|Z |
2
< AcK
lim sup P p < A ≤ P p
,
ǫ
L
2π
L→∞
which can be arbitrarily small if A = A(ǫ) is small enough, for L large. We now deal with the other
term in (83), using the exponential Bienaymé-Chebyshev inequality (and the fact that the ∆τn are
i.i.d.):
p
Ap L
r
A
Lp
p
X
p
1
τ
u
1
Pp
∆τn <
log L 6 e(u/c) log L E exp −
.
(84)
c
L
log
L
L log L n=1
To estimate this expression, we remark that, for L large enough,
r
∞
Æ n
X
τ1
−
E 1 − exp −
=
K(n) 1 − e L log L
L log L
n=1
Æ n
r
− L log
∞
X
L
log L
1
−
e
,
≥ c ′′
≥ c′
3/2
L
n
n=1
671
(85)
where the last inequalityÆ follows from keeping only the terms with n ≤ L in the sum, and noting
p
n
−
that in this range 1 − e L log L ≥ c n/(L log L). Therefore,
r
E exp −
r
Ap L
τ1
6
L log L
1 − c ′′
log L
!Ap L
≤ e−c
L
′′
p
A
log L
,
and, plugging this bound in the inequality (84), we get
p
A
Lp
p
X
p
1
u
′′
Pp
∆τn 6
log L 6 e[(u/c)−c A] log L ,
c
L log L n=1
(86)
(87)
that goes to 0 if L → ∞, provided that u is small enough. This concludes the proof of Lemma 4.2.
4.3 Proof of Lemma 4.3
We can write
− F1 + Eτ [F1 ] = S1 + S2 :=
b
X
Mi j Di j +
′
X
Mi j Di j
(88)
i6= j
i6= j=a+1
where we denoted
Di j = ∆i · ∆ j − Eτ [∆i · ∆ j ]
(89)
′
P
stands for the sum over all 1 ≤ i 6= j ≤ L such that either i or j (or both) do not fall into
and
{a + 1, . . . , b}. This way, we have to estimate
Eτ [(F1 − Eτ [F1 ])2 ] ≤ 2Eτ [S12 ] + 2Eτ [S22 ]
b
X
= 2
b
X
(90)
Mi j Mkl Eτ [Di j Dkl ] + 2
′
′ X
X
Mi j Mkl Eτ [Di j Dkl ].
i6= j k6=l
i6= j=a+1 k6=l=a+1
Remark 4.6. We easilyh deal with theipart of the sum where {i, j} = {k, l}. In fact, we trivially bound
2 2
Eτ (∆i · ∆ j )2 ≤ Eτ ∆i ∆ j . Suppose for instance that τn−1 < i ≤ τn for some R a < n ≤
h i
2 2
2
2
R b : in this case, Remark 4.5 tells that Eτ ∆i ∆ j converges to EY [∆1 ∆2 ] = σ4Y as
h i
2
2
τn − τn−1 → ∞. If, on the other hand, i ∈
/ {a + 1, . . . , b}, we know that Eτ ∆i ∆ j equals
h i h i
2
2
exactly EY ∆1 Eτ ∆ j which is also bounded. As a consequence, we have the following
inequality, valid for every 1 ≤ i, j ≤ L:
Eτ (∆i · ∆ j )2 ≤ c
(91)
and then
L
X
X
Mi j Mkl Eτ [Di j Dkl ] 6 c
i6= j=1 {k,l}={i, j}
L
X
i6= j=1
since the Hilbert-Schmidt norm of M was choosen to be finite.
672
Mi2j 6 c ′
(92)
Upper bound on Eτ [S22 ]. This is the easy part, and this term will be shown to be bounded even
b
without taking the average over P.
′
′
P
P
Again, thanks to (56)-(57), we have
We have to compute
k6=l Mi j Mkl Eτ [Di j Dkl ].
i6= j
Eτ [Di j Dkl ] 6= 0 only in the following case (recall that thanks to Remark 4.6 we can disregard
the case {i, j} = {k, l}):
i=k∈
/ {a + 1, . . . , b} and τn−1 < j 6= l ≤ τn for some R a < n ≤ R b .
(93)
One should also consider the cases where i is interchanged with j and/or k with l. Since we are
not following constants, we do not keep track of the associated combinatorial factors. Under the
assumption (93), Eτ [∆i · ∆ j ] = Eτ [∆i · ∆l ] = 0 (cf. (56)) and we will show that
c
Eτ [Di j Dil ] = Eτ [(∆i · ∆ j )(∆i · ∆l )] ≤
(94)
r
where r = τn − τn−1 =: ∆τn . Indeed, using (56)-(57), we get
Eτ [(∆i · ∆ j )(∆i · ∆l )] =
=
3
X
(µ)
(ν)
ν,µ=1
h
νµ
(ν)
ΣY EX EY ∆ j−τ
3
X
(µ)
(ν)
EY [∆i ∆i ]EX EY [∆ j−τ
ν,µ=1
n−1
(µ)
n−1
∆l−τ
n−1
∆l−τ
n−1
|X τn −τn−1 = Yτn −τn−1 ]
i
|X r = Yr .
(95)
In the remaining expectation, we can assume without loss of generality that τn−1 = 0, τn = r. Like
for instance in the proof of (59), one writes
i
h Y
(µ)
i EX EY ∆(ν)
h
P
(Y
=
X
)
∆
|Y
=
X
r
r
r
r
j
l
(ν) (µ)
EX EY ∆ j ∆l |X r = Yr =
(96)
X
−Y
P
(X r = Yr )
and
EY
(ν) (µ) ∆ j ∆l Yr = X r =
1
r(r − 1)
X r(ν) X r(µ) −
1
r −1
(ν)
(µ)
EY [∆ j ∆ j |Yr = X r ].
(97)
An application of the Local Limit Theorem like in (62), (63) then leads to (94).
We are now able to bound
Rb
X
X
Eτ S22 = c
X
Mi j Mil Eτ [Di j Dil ]
n=R a +1 τn−1 < j6=l 6 τn
i ∈{a+1,...,b}
/
6
L log L
Rb
X
X
c
X
p
n=R a +1 τn−1 < j,l 6 τn
i ∈{a+1,...,b}
/
1
|i − j|
p
1
1
|i − l| ∆τn
Assume for instance that i > b (the case i ≤ a can be treated similarly):
Rb
X X
c
L log L
≤
X
p
i>b n=R a +1 τn−1 < j,l 6 τn
c
L log L
Rb
X X
1
i− j
p
1
i − l ∆τn
X
i>b n=R a +1 τn−1 < j,l 6 τn
1
1
(i − τn )∆τn
673
≤
c
L log L
(b − a)
L
X
1
i=1
i
≤ c′.
.
(98)
Upper bound on Eτ [S12 ]. Thanks to time translation invariance, one can reduce to the case a = 0.
We have to distinguish various cases (recall Remark 4.6: we assume that {i, j} =
6 {k, l}).
1. Assume that τn−1 < i, j ≤ τn , τm−1 < k, l ≤ τm , with 1 ≤ n 6= m ≤ R b . Then, thanks to
(56), we get Eτ [Di j Dkl ] = Eτ [Di j ]Eτ [Dkl ] = 0, because Eτ [Di j ] = 0. For similar reasons,
one has that Eτ [Di j Dkl ] = 0 if one of the indexes, say i, belongs to one of the intervals
{τn−1 + 1, . . . , τn }, and the other three do not.
2. Assume that τn−1 < i, j, k, l ≤ τn for some n ≤ R b . Using (57), we have
Y X
Eτ [Di j Dkl ] = E E Di j Dkl X τn−1 = Yτn−1 , X τn = Yτn ,
and with a time translation we can reduce to the case n = 1 (we call τ1 = r). Thanks to the
computation of Eτ [∆i · ∆ j ] in Section 4.2, we see that Eτ [∆i · ∆ j ] = Eτ [∆k · ∆l ] = −A(r) so
that
Eτ [Di j Dkl ] = Eτ [(∆i · ∆ j )(∆k · ∆l )] − A(r)2 6 Eτ [(∆i · ∆ j )(∆k · ∆l )].
(99)
(a) If i = k, j 6= l (and τn−1 < i, j, l ≤ τn for some n ≤ R b ), then
Eτ [(∆i · ∆ j )(∆i · ∆l )] ≤
c
∆τn
.
(100)
The computations are similar to those we did in Section 4.2 for the computation of
Eτ [∆i · ∆ j ]. See Appendix A.1 for details.
(b) If {i, j} ∩ {k, l} = ; (and τn−1 < i, j, k, l ≤ τn for some n ≤ R b ), one gets
Eτ [(∆i · ∆ j )(∆k · ∆l )] ≤
c
(∆τn )2
.
(101)
See Appendix A.2 for a (sketch of) the proof, which is analogous to that of (100).
3. The only remaining case is that where i ∈ {τn−1 + 1, . . . , τn }, j ∈ {τm−1 + 1, . . . , τm } with
m 6= n ≤ R b , and each of these two intervals contains two indexes in i, j, k, l. Let us suppose
for definiteness n < m and k ∈ {τn−1 + 1, . . . , τn }. Then Eτ [∆i · ∆ j ] = Eτ [∆k · ∆l ] = 0 (cf.
Lemma 4.4), and Eτ [Di j Dkl ] = Eτ [(∆i · ∆ j )(∆k · ∆l )]. We will prove in Appendix A.3 that
Eτ [(∆i · ∆ j )(∆k · ∆l )] 6
c
∆τn ∆τm
(102)
and that
Eτ [(∆i · ∆ j )(∆i · ∆l )] 6
c
∆τm
.
(103)
We are now able to compute Eτ [S12 ]. We consider first the contribution of the terms whose indexes
i, j, k, l are all in the same interval {τn−1 + 1, . . . , τn }, i.e. case (2) above. Recall that we drop the
674
terms {i, j} = {k, l} (see Remark 4.6):
X
c
Mi j Mkl Eτ [Di j Dkl ] 6
∆τn
τ
<i, j,k,l 6 τ
n−1
n
{i, j}6={k,l}
c ′′
6
L log L
p
1≤i< j<k≤∆τn
X
c
Mi j Mkl +
∆τ2n
l∈{i, j} or k∈{i, j}
τn−1 <i, j,k,l 6 τn
X
′
1
L log L ∆τn
c
6
X
Mi j Mkl
{i, j}∩{k,l}=;
τn−1 <i, j,k,l≤τn
1
j−i
p
1
+
k− j
1
1 X
p
∆τ2n 1≤i< j≤∆τ
j−i
n
∆τn .
2
(104)
Altogether, we see that
b
X
b
X
i6= j=1
k6=l=1
{i, j}6={k,l}
Mi j Mkl Eτ [Di j Dkl ]1{∃n≤R b :i, j∈{τn−1 +1,...,τn }}
=
Rb
X
X
Rb
X
c
Mi j Mkl Eτ [Di j Dkl ] 6
L log L
n=1 τn−1 <i, j,k,l≤τn
{i, j}6={k,l}
n=1
∆τn ≤
c
log L
. (105)
Finally, we consider the contribution to Eτ [S12 ] coming from the terms of point (3). We have (recall
that n < m)
X
X
1
c
1
1
Mi j Mkl Eτ [Di j Dkl ] 6
(106)
p
p
L log L ∆τn ∆τm τ <i6=k≤τ
l−k
j
−
i
τn−1 <i,k≤τn
n−1
n
τm−1 < j,l≤τm
{i, j}6={k,l}
τm−1 < j6=l≤τm
+
+
But as j > τm−1
X
1
6
p
j−i
τn−1 <i 6 τn
X
p
τn−1 <i 6 τn
X
1
c
L log L ∆τn
τn−1 <i6=k≤τn
τm−1 < j≤τm
X
1
c
L log L ∆τm
1
τm−1 − i + 1
6c
p
p
1
j−i
p
τn−1 <i≤τn
τm−1 < j6=l≤τm
τm−1 − τn−1 −
p
1
j−i
p
1
j−k
p
1
l−i
.
τm−1 − τn ,
(107)
and as k 6 τn
X
τm−1 <l 6 τm
so that
X
τn−1 <i,k≤τn
τm−1 < j,l≤τm
{i, j}6={k,l}
p
1
l−k
X
p
6
τm−1 <l 6 τm
Mi j Mkl Eτ [Di j Dkl ] 6
c
L log L
1
6c
p
l − τn
p
Tnm + ∆τn −
τm − τn −
p
Tnm
p
p
τm−1 − τn ,
Tnm + ∆τm −
p
(108)
Tnm ,
(109)
675
where we noted Tnm = τm−1 − τn . Recalling (105) and the definition (90) of S1 , we can finally write
RX
b −1
X
2
b
b
E Eτ [S1 ] ≤ c 1 + E
n=1 n<m≤R
6
c+
c
L log L
p
X
b
E
1≤n<m≤R b
X
b
τn−1 <i,k≤τn
τm−1 < j,l≤τm
Tnm + ∆τn −
Mi j Mkl Eτ [Di j Dkl ]
p
Tnm
p
Tnm + ∆τm −
p
Tnm .
The remaining average can be estimated via the following Lemma.
Lemma 4.7. There exists a constant c > 0 depending only on K(·), such that
p
p
X
p
p
b
E
Tnm + ∆τn − Tnm
Tnm + ∆τm − Tnm 6 c L(log L)7/4 .
(110)
1≤n<m≤R b
bEτ [S 2 ] ≤ c(log L)3/4 , which together with (98) implies the claim of
Of course this implies that E
1
Lemma 4.3.
Proof of Lemma 4.7. One has the inequality
p
p
p
p
p
p
Tnm + ∆τn − Tnm
Tnm + ∆τm − Tnm 6 ∆τn ∆τm ,
(111)
which is a good approximation when Tnm is not that large compared with ∆τn and ∆τm , and
p
Tnm + ∆τn −
p
Tnm
p
Tnm + ∆τm −
p
Tnm
6c
∆τn ∆τm
Tnm
,
(112)
which is accurate when Tnm is large. We use these bounds to cut the expectation (110) into two
parts, a term where m − n 6 H L and one where m − n > H L , with H L to be chosen later:
Rb X
Rb p
X
p
p
p
b
E
Tnm + ∆τn − Tnm
Tnm + ∆τm − Tnm
n=1 m=n+1
6
R b (n+H
Rb
L )∧R b p
X
X
X
p
b
b
∆τn ∆τm + c E
E
n=1
Rb
X
n=1 m=n+H L +1
m=n+1
∆τn ∆τm
Tnm
.
We claim that there exists a constant c such that for every l ≥ 1,
RX
b −l p
p
p
1
b
∆τn ∆τn+l 6 c L(log L)2+ 12
E
n=1
(the proof is given later). Then the first term in the right-hand side of (113) is
RX
R b (n+H
HL
b −l p
L )∧R b p
X
X
X
p
p
p
b
b
E
∆τn ∆τm =
∆τn ∆τn+l 6 cH L L(log L)2+1/12 .
E
n=1
m=n+1
l=1
n=1
676
(113)
(114)
If we choose H L =
p
b
E
L(log L)−1/3 , we get from (113)
Rb X
Rb X
p
n=1 m=n+1
Tnm + ∆τn −
p
Tnm
p
6
b
c L(log L)7/4 + c E
Tnm + ∆τm −
Rb
X
Rb
X
n=1 m=n+H L +1
p
Tnm
∆τn ∆τm
Tnm
(115)
.
As for the second term in (113), recall that Tnm = τm−1 − τn and decompose the sum in two parts,
according to whether Tnm is larger or smaller than a certain K L > 1 to be fixed:
Rb
Rb
X
X
∆τn ∆τm
b
E
T
nm
n=1 m=n+H L +1
Rb
Rb
Rb
Rb
X
X
X
X
∆τn ∆τm
b
b
≤ E
1{Tnm >K L } + E
∆τn ∆τm 1{Tnm 6 K L }
T
nm
n=1 m=n+H L +1
n=1 m=n+H L +1
!
2
Rb
Rb
Rb
X
X
1 X
b
b
E
∆τn + L 2 E
1{τn+H −τn 6 K L }
6
L
KL
n=1
n=1 m=n+H +1
L
6
L
2
KL
b τH 6 K L .
+ L4P
L
(116)
We now set K L = L(log L)−7/4 , so that we get in the previous inequality
Rb
Rb
X
X
∆τn ∆τm
6 L(log L)7/4 + L 4 P
b τH 6 K L ,
b
E
L
Tnm
n=1 m=n+H +1
(117)
L
b τH 6 K L = o(L −4 ). Indeed,
and we are done if we prove for instance that P
L
b τH 6 K L
b R K ≥ H L 6 cP R K ≥ H L
P
= P
L
L
L
(118)
b := P(·|b ∈ τ) (in fact, K L 6 b/2
where we used Lemma A.1 to take the conditioning off from P
p
since b ≥ ǫ L). Recalling the choices of H L and K L , we get that H L / K L = (log L)13/24 and, combining (118) with Lemma A.2, we get
13/12
b τH 6 K L 6 c ′ e−c(log L)
P
= o(L −4 )
(119)
L
which is what we needed.
To conclude the proof of Lemma 4.7, we still have to prove (114). Note that
RX
RX
b −l
b −l p
hp
p
p
i
b
b 1{R >l}
b
E
∆τn ∆τn+l 1{R b >l} = E
∆τn ∆τn+l R b
E
b
n=1
n=1
h
p
ii
b 1{R >l} (R b − l)E
b p τ 1 τ 2 − τ 1 R b
= E
b
h p p
i
b R b τ1 τ2 − τ1 1{R ≥2}
≤ E
b
h
677
(120)
b
where we used the fact that, under P(·|R
b = p) for a fixed p, the law of the jumps {∆τn }n≤p is
exchangeable. We first bound (120) when R b is large:
h
i
p
p
2b
p
b R b pτ1 τ2 − τ1 1
E
L
log
L
P
R
≥
κ
6
L
b
{R b ≥κ L log L}
p
(121)
6 L 2 P(b ∈ τ)−1 P R b ≥ κ L log L .
p
In view of (14), we have P(b ∈ τ)−1 = O( L). Thanks to Lemma A.2 in the Appendix, and choosing
κ large enough, we get
p
2
(122)
P R b ≥ κ L log L 6 e−cκ log L+o(log L) = o(L −5/2 ),
and therefore
h
p
b R b pτ1 τ2 − τ1 1
E
{R
b ≥κ
p
i
L log L}
= o(1).
(123)
As a consequence,
i
h
i
h
p
p
p
b R b pτ1 τ2 − τ1 1
b R b pτ1 τ2 − τ1 1{R ≥2} = E
+ o(1)
E
b
{2≤R b <κ L log L}
h
i
p
p
b pτ1 τ2 − τ1 1{R ≥2}
L(log L)1/12 E
6
b
hp p
i
p
b
τ1 τ2 − τ1 1{R b >p L(log L)1/12 } + o(1).
+ κ L log L E
(124)
Let us deal with the second term:
i
h
p p
p
b 1
τ
τ
−
τ
E
1/12
1
2
1
}
{R b > L(log L)
=
=
1
P(b ∈ τ)
1
P(b ∈ τ)
b−i
b X
X
pp
p
i jP τ1 = i, τ2 − τ1 = j, b ∈ τ, R b > L(log L)1/12
i=1 j=1
b−i
b X
X
pp
p
i jK(i)K( j)P b − i − j ∈ τ, R b−i− j > L(log L)1/12 − 2 . (125)
i=1 j=1
But we have
p
1p
1/12
1/12
P R b−i− j > L(log L)
− 2 b − i − j ∈ τ 6 2P R(b−i− j)/2 >
L(log L)
−1 b−i− j ∈τ
2
1p
L(log L)1/12 − 1
6 cP R(b−i− j)/2 >
2
1p
1/6
1/12
L(log L)
− 1 6 c ′ e−c(log L)
(126)
6 cP R L >
2
where we first used Lemma A.1 to take the conditioning off, and then Lemma A.2. Putting (125)
and (126) together, we get
h
i
p p
p
b 1
E
τ
τ
−
τ
1/12
1
2
1
{R b > L(log L)
}
6
=
′ −c(log L)1/6
ce
1
b−i
b X
X
pp
i jK(i)K( j)P b − i − j ∈ τ
P(b ∈ τ) i=1 j=1
h
i
p
1/6
b pτ1 τ2 − τ1 1{R ≥2} .
c ′ e−c(log L) E
b
678
(127)
So, recalling (124), we have
h
i
i
h
p
p
p
b R b pτ1 τ2 − τ1 1{R ≥2} 6 2 L(log L)1/12 E
b pτ1 τ2 − τ1 1{R ≥2} + o(1)
E
b
b
(128)
and we only have to estimate (recall (14))
h
i
p
b pτ1 τ2 − τ1 1{R ≥2}
E
b
=
b−p
b−1 X
X
P(b − p − q ∈ τ)
p p
p qK(p)K(q)
P(b ∈ τ)
p=1 q=1
6
b−p
b−1 X
p X
1
1
c b
.
p
pq b+1− p−q
p=1 q=1
(129)
Using twice the elementary estimate
M
−1
X
k=1
1
k
p
1
1
≤ c p log M ,
M
M −k
we get
b−1
i
hp p
p 1
p X
1
1
b
τ1 τ2 − τ1 1{R b ≥2} 6 c b
log(b − p + 1) 6 c b p (log L)2 .
E
p
p b−p+1
b
p=1
(130)
Together with (128), this proves the desired estimate (114).
4.4 Dimension d = 4 (a sketch)
As we mentioned just after Theorem 2.8, it is possible to adapt the change-of-measure argument to
prove non-coincidence of quenched and annealed critical points in dimension d ≥ 4 for the general
walks of Assumption 2.1, while the method of Birkner and Sun [3] does not seem to adapt easily
much beyond the simple random walk case. In this section, we only deal with the case d = 4, since
the Theorem 2.8 is obtained for d ≥ 5 in [2], with more general condition than Assumption 2.1. We
will not give details, but for the interested reader we hint at the “right” change of measure which
works in this case.
The “change of measure function” gI (Y ) is still of the form (27), factorized over the blocks which
belong to I , but this time M is a matrix with a finite bandwidth:
1
Fk (Y ) = − p
L
kL−p
X0
i=L(k−1)+1
∆i · ∆i+p0 ,
(131)
where p0 is an integer. The role of the normalization L −1/2 is to guarantee that kM k < ∞. The
integer p0 is to be chosen such that A(p0 ) > 0, where A(·) is the function defined in Lemma 4.4. The
existence of such p0 is guaranteed by the asymptotics (59), whose proof for d = 4 is the same as for
d = 3.
For the rest, the scheme of the proof of βc 6= βcann (in particular, the coarse-graining procedure) is
analogous to that we presented for d = 3, and the computations involved are considerably simpler.
679
A Some technical estimates
Lemma A.1. (Lemma A.2 in [9]) Let P be the law of a recurrent renewal whose inter-arrival law
n→∞
satisfies K(n) ∼ cK n−3/2 for some cK > 0. There exists a constant c > 0, that depends only on K(·),
such that for any non-negative function f N (τ) which depends only on τ ∩ {1, . . . , N }, one has
sup
E[ f N (τ) |2N ∈ τ ]
E[ f N (τ)]
N >0
(132)
6 c.
Lemma A.2. Under the same assumptions as in Lemma A.1, and with R N := |τ ∩ {1, . . . , N }|, there
exists a constant
p c > 0, such that for any positive function α(N ) which diverges at infinity and such
that α(N ) = o( N ), we have
p
2
2
(133)
P R N ≥ N α(N ) 6 e−cα(N ) +o(α(N ) ) .
Proof. For every λ > 0
P RN ≥
p
N α(N )
=
6
τp
2
τpN α(N )
2
6 λα(N )
(134)
6 N = P λα(N )
N
h
ipN α(N )
α(N )2 p
2 τ1
2
2
.
eλα(N ) E e−λ N τ N α(N ) = eλα(N ) E e−λα(N ) N
P
N α(N )
h
i
2 τ1
The asymptotic behavior of E e−λα(N ) N is easily obtained:
h
i
X
2 τ1
2
1 − E e−λα(N ) N
=
K(n) 1 − e−nλα(N ) /N
n∈N
p
N →∞
∼
c
λα(N )
, c = cK
p
N
Z
∞
0
1 − e−x
x 3/2
dx,
(135)
where the condition α(N )2 /N → 0 was used to transform the sum into an integral. Therefore, we
get
h
E e
Then, for any λ > 0,
τ
−λα(N )2 N1
ipN α(N )
p
λα(N )
+o
=
1−c p
N
p
2
2
= e−c λα(N ) +o(α(N ) ) .
α(N )
p
N
p
p
p
2
2
P R N ≥ N α(N ) 6 e(λ−c λ)α(N ) +o(α(N ) )
N α(N )
(136)
(137)
and taking λ = c 2 /4 we get the desired bound.
We need also the following standard result (cf. for instance [10, Section 5]):
Lemma A.3. Under the same hypothesis as in Lemma A.1, we have the following convergence in law:
cK
1
N →∞
|Z |
p RN ⇒ p
N
2π
(Z ∼ N (0, 1)).
680
(138)
A.1 Proof of (100)
We wish to show that for distinct i, j, l smaller than r,
c
EX EY [(∆i · ∆ j )(∆i · ∆l )|X r = Yr ] ≤ .
r
(139)
We use the same method as in Section 4.2: we fix x ∈ Zd , and we use the notation EYr,x [·] =
EY [· Yr = x ]. Then,
h
i
= EYr,x (∆i · ∆ j ) ∆i · EYr,x ∆l ∆i , ∆ j
EYr,x (∆i · ∆ j )(∆i · ∆l )
=
=
6
=
6
EYr,x (∆i · ∆ j ) ∆i · (x − ∆i − ∆ j )
r −2
h
i
2 1
EYr,x (∆i · ∆ j ) (x · ∆i ) − ∆i − (∆i · ∆ j )2
r −2
h
i
2 1
EYr,x
∆i · EYr,x ∆ j ∆i
(x · ∆i ) − ∆i r −2
2 2
1
Y
(x · ∆i ) − ∆i
E
(r − 1)(r − 2) r,x
h
2 4 i
2
EYr,x kxk2 ∆i + ∆i (r − 1)(r − 2)
1
and we can take by symmetry i = 1. Therefore,
Y
X
Y = X PY (Y = X )
E
(∆
·
∆
)(∆
·
∆
)
E
r
r
r
r
i
j
i
l
EX EY (∆i · ∆ j )(∆i · ∆l ) X r = Yr =
(140)
X
−Y
P
(Yr = X r )
h
i
1 Y
kX r k2 Y X
2
4
Y
+
k∆
k
|Y
=
X
E
E
(k∆
k
|Y
=
X
)
P
(Y
=
X
)
1
r
r
r
r
1
r
r
cE
r
r
≤
r
PX −Y (Yr = X r )
kX r k
c X Y
E E Q p , k∆1 k Yr = X r ,
=
r
r
where
Q
kX r k
p , k∆1 k
r
=
kX r k2
r
k∆1 k4
k∆1 k2 +
r
.
(141)
At this point, one can apply directly the result of Remark 4.5.
A.2 Proof of (101)
We wish to prove that, for distinct i, j, k, l ≤ r,
Eτ [(∆i · ∆ j )(∆k · ∆l )] 6
c
r2
.
(142)
The proof is very similar to that of (139), so we skip details. What one gets is that
Y
′ kX r k
Y
X
, {k∆i k}i=1,2,3 Yr = X r P (Yr = X r )
E E Q
r 1/2
c
Eτ (∆i · ∆ j )(∆k · ∆l ) 6 2
, (143)
PX −Y (Yr = X r )
r
681
where Q′ is a polynomial of degree four. Again, like after (140), one uses the Remark 4.5 to get the
desired result.
A.3 Proof of (102)-(103)
In view of (56), in order to prove (102) it suffices to prove that for 0 < i 6= k ≤ r, 0 < j 6= l ≤ s
3
X
ν,µ=1
(ν)
(µ)
(ν)
(µ)
EX EY [∆i ∆k |X r = Yr ]EX EY [∆ j ∆l |X s = Ys ] ≤
c
rs
.
(144)
Both factors in the left-hand side have already been computed in (96)-(97). Using these two expressions and once more the Local Limit Theorem, one arrives easily to (144). The proof of (103) is
essentially identical.
Acknowledgments
We would like to thank Rongfeng Sun for showing us the preprint [4] before its publication and
for several enlightening discussions and comments, which by the way allowed us to considerably
weaken the conditions of Theorem 2.8.
References
[1] K.S. Alexander and N. Zygouras, Quenched and annealed critical points in polymer pinning
models, Comm. Math. Phys. 291 (2009), 659–689. MR2534789
[2] M. Birkner, A. Greven and F. den Hollander, Quenched large deviation principle for words in a
letter sequence, Probab. Theory Rel. Fields, to appear, arXiv: 0807.2611v1 [math.PR]
[3] M. Birkner and R. Sun, Annealed vs Quenched critical points for a random walk pinning model,
Ann. Inst. Henri Poincaré – Probab. Stat., to appear, arXiv: 0807.2752v1 [math.PR]
[4] M. Birkner and R. Sun, Disorder relevance for the random walk pinning model in d = 3,
arXiv:0912.1663.
[5] B. Davis and D. McDonald, An Elementary Proof of the Local Limit Theorem, J. Theoret.
Probab. 8(3) (1995), 693–701. MR1340834
[6] B. Derrida, G. Giacomin, H. Lacoin and F.L. Toninelli, Fractional moment bounds and disorder
relevance for pinning models, Comm. Math. Phys. 287 (2009), 867-887. MR2486665
[7] R.A. Doney, One-sided local large deviation and renewal theorems in the case of infinite mean,
Probab. Theory Relat. Fields 107 (1997) 451-465. MR1440141
[8] G. Giacomin, Random Polymer Models, Imperial College Press, 2007. MR2380992
[9] G. Giacomin, H. Lacoin and F.L. Toninelli, Marginal relevance of disorder for pinning models,
Comm. Pure Appl. Math. 63 (2010), 233–265. MR2588461
682
[10] G. Giacomin, H. Lacoin and F.L. Toninelli, Disorder relevance at marginality and critical point
shift, Ann. Inst. Henri Poincaré – Probab. Stat., to appear, arXiv:0906.1942v1 [math-ph]
[11] R. A. Horn, C. R. Johnson, Matrix analysis, Cambridge University Press, Cambridge, 1985.
MR0832183
[12] H. Lacoin, New bounds for the free energy of directed polymer in dimension 1+1 and 1+2,
Comm. Math. Phys. 294 (2010), 471–503. MR2579463
[13] G.F. Lawler, Intersections of random walks, Probability and its Applications. Birkhäuser, Boston,
MA, 1991. MR1117680
[14] F. L. Toninelli, Coarse graining, fractional moments and the critical slope of random copolymers,
Electron. Journal Probab. 14 (2009), 531–547. MR2480552
[15] A. Yilmaz, O. Zeitouni, Differing averaged and quenched large deviations for random walks
in random environments in dimensions two and three, Commun. Math. Phys., to appear,
arXiv:0910.1169.
683