Quiz di Math 308: Equazioni autonome ed equazioni differenziali
advertisement

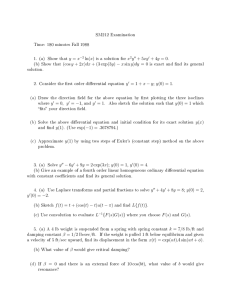
MATH 308, Spring 2016 QUIZ # 3 Print name (LAST, First): SECTION #: INSTRUCTOR: Dr. Marco A. Roque Sol THE AGGIE CODE OF HONOR "An Aggie does not lie, cheat, or steal, or tolerate those who do." By signing below, you indicate that all work is your own and that you have neither given nor received help from any external sources. SIGNATURE: 1. (10 pts.)(Problem 9 . Secc. 2.5) For the autonomous equation dy = y 2 (y 2 − 1) dt − ∞ < y0 < ∞ . Determine the critical (equilibrium) points, and classify each one as asymptotically stable, unstable, or semistable. Divide the t − y plane in horizontal strips ( determined by the equilibrium points) indicating the sign of y 0 in each one. Explain clearly your answer. Solution The critical points satisfy that . this implies that dy dt = 0, in this case we have dy = y 2 (y 2 − 1) = y 2 (y − 1)(y + 1) = 0 dt y = −1; y = 0; y=1 . are the equilibrium solutions. Now, since the behavior of y 0 is −∞ < y < −1; y0 > 0 . −1 < y < 0; y0 < 0 . then, y = −1 is an asympotically stable ( atracting from above and atracting from below) equiliubrium solution. Now, since the behavior of y 0 is −1 < y < 0; y0 < 0 . y0 < 0 0 < y < 1; . then, y = 0 is an asympotically semi-stable ( atracting from above and repelling from below) equiliubrium solution. Now, since the behavior of y 0 is 0 < y < 1; y0 < 0 1 < y < ∞; y0 > 0 . . then, y = 1 is an asympotically semi-stable ( repelling from above and repelling from below) equiliubrium solution. 2. (10 pts.) (Problem 1. Secc. 2.4) For the next linear dierential equation, determine (without solving the problem) an interval in which the solution of the given initial value problem is certain to exist. (t − 3)y 0 + ln(t)y = 2t; y(1) = 2 . Solution (t − 3)y 0 + ln(t)y = 2t; =⇒ y 0 + . p(t) = 2t ln(t) y= =⇒ y 0 + p(t)y = q(t) t−3 t−3 ln(t) t−3 q(t) = 2t t−3 . The function p(t) is continuous on −∞ < t < 0; 0 < t < 3; 3 < t < ∞ The function q(t) is continuous on −∞ < t < 3; 3 < t < ∞. Therefore, using the theorem of existence and uniqueness for linear rst order dierential equation, then the IVP has a solution on 0 < t < 3 3. (10 pts ) (Problem 17. Secc. 2.3) Heat transfer from a body to its surroundings by radiation, based on the Stefan-Boltzmann law, is described by the dierential equation du = −α(u4 − T 4 ) dt · · · (i) . where u(t) is the absolute temperature of the body at time t , T is the absolute temperature of the surroundings, and α is a constant depending on the physical parameters of the body. However, if u is much larger than T , then solutions of Eq. (i) are well approximated by solutions of the simpler equation du = −αu4 dt · · · (ii) . Suppose that a body with initial temperature 2000 K is surrounded by a medium with temperature 300 K and that α = 2.0 × 10−12 K −3 /s. (a) Determine the temperature of the body at any time by solving Eq. (ii). (b) Find the time τ at which u(τ ) = 600 - that is, twice the ambient temperature. Solution a) The dierential equation is separable and we have that du du = −αu4 =⇒ 4 = −αdt =⇒ dt u . and itegrating we obtain − Z du =− u4 Z αdt 1 1 = −αt − c =⇒ u(t) = p 3 3u3 [3(αt + c)] . and applying initial conditions u(0) = 2000 and T << u =⇒ 2000 = p 3 1 1 1 =⇒ c = =⇒ 2000 = √ × 10−6 3 24 3c [3(0 + c)] and the particular solution is u(t) = q 3 3(αt + 1 1 24 1 1 = αt + × 10−6 3 3u 24 or × 10−6 ) . Now, the time τ such that u(τ ) = 600 is given by 1 1 1 1 = ατ + × 10−6 =⇒ × 10−6 = ατ + × 10−6 =⇒ τ ≈ 751s 3(600)3 24 3(6)3 24 . 4. (10 pts.)(Bonus) (Problem 27. Secc. 2.4) Bernoulli Equations. Sometimes it is possible to solve a nonlinear equation by making a change of the dependent variable that converts it into a linear equation. The most important such equation has the form y 0 + p(t)y = q(t)y n . and is called a Bernoulli equation after Jakob Bernoulli. (a) Solve Bernoulli's equation when n = 0 ; when n = 1 (b) Show that if n 6= 0, 1 , then the substitution v = y 1−n reduces Bernoulli's equation to a linear equation. This method of solution was found by Leibniz in 1696. Solution a) For the cases n = 0, 1, we have R y 0 + p(t)y = q(t) =⇒ e p(t)dt 0 R y +e p(t)dt =⇒ y = e− R p(t)y = e p(t)dt Z e R R p(t)dt p(t)dt q(t) =⇒ e R p(t)dt y 0 =e R p(t)dt q(t) q(t)dt + c . dy 1 = y 0 = (q(t) − p(t)) y =⇒ dy = (q(t) − p(t)) dt =⇒ 2ln|y| = 2 y + p(t)y = q(t)y =⇒ dt y 0 Z (q(t) − p(t)) dt + C =⇒ y 2 = e2 R (q(t)−p(t))dt+C b) Since we have v = y 1−n and v 0 = (1 − n)y −n y 0 or y 0 = y 0 + p(t)y = q(t)y n =⇒ =⇒ y 2 = ce2 yn 0 1−n v R (q(t)−p(t))dt substituing this in the equation we have yn 0 1 1 v + p(t)y = q(t)y n =⇒ v 0 + p(t)y 1−n = q(t) =⇒ v 0 (t) + p(t)v(t) = q(t) 1−n 1−n 1−n . which is a linear rst order dierential equation.