Math 152 Class Notes November 24, 2015 11.1 Three-Dimensional Coordinate Systems
advertisement

Math 152 Class Notes
November 24, 2015
11.1 Three-Dimensional Coordinate Systems
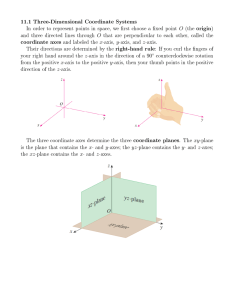
In order to represent points in space, we rst choose a xed point O (the origin)
and three directed lines through O that are perpendicular to each other, called the
coordinate axes and labeled the x-axis, y -axis, and z -axis. Their directions are
determined by the right-hand rule: If you curl the ngers of your right hand around
the z -axis in the direction of a 90◦ counterclockwise rotation from the positive x-axis
to the positive y -axis, then your thumb points in the positive direction of the z -axis.
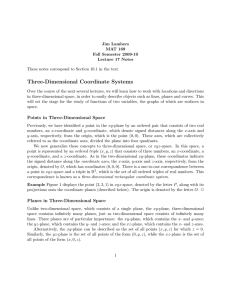
The three coordinate axes determine the three coordinate planes. The xy -plane is
the plane that contains the x- and y -axes; the yz -plane contains the y - and z -axes; the
xz -plane contains the x- and z -axes.
If P is any point in space, let a be the (directed) distance from the yz -plane to P , let b
be the distance from the xz -plane to P and let c be the distance from the xy -plane to P .
We represent P by the ordered triple (a, b, c) and we call a, b, and c the coordinates
of P ; a is the x-coordinate, b is the y -coordinate, and c is the z -coordinate.
Let R3 = {(x, y, z)|x, y, z ∈ R} be the set of all ordered triples of real numbers. We
have given a one-to-one correspondence between points P in space and ordered triples
(a, b, c) in R3 . It is called a three dimensional rectangular coordinate system.
If we drop a perpendicular from a point P (a, b, c) to the xy -plane, we get a point with
coordinates (a, b, 0) called the projection of P onto the xy -plane. Similarly, (0, b, c)
and (a, 0, c) are the projections of P onto the yz -plane and xz -plane, respectively.
Example 1. Find the projection of the point P (−4, 3, −5) onto the three coordinate
planes?
Distance Formula in Three Dimensions:
The distance |P1 P2 | between the points
P1 (x1 , y1 , z1 ) and P2 (x2 , y2 , z2 ) is
p
|P1 P2 | = (x2 − x1 )2 + (y2 − y1 )2 + (z2 − z1 )2
Example 2. Find the distance between the points P (1, 5, 3) and Q(−2, 1, 2).
Example 3. Describe the following regions in R3 .
(a) z = 0
(b) y = 3
(c) x = y
(d) x2 + y 2 = 4
(e) x2 + y 2 = 4, z = 5
(f) x2 + y 2 ≤ 4
By denition, a sphere is the set of all points whose distance from its center is equal
to the radius. Thus an equation of a sphere with center C(x0 , y0 , z0 ) and radius r
is given by
(x − x0 )2 + (y − y0 )2 + (z − z0 )2 = r2
Example 4. Find the equation of the sphere with radius 3 and center (3, 2, 5).
Example 5. (a) Find the center and radius of the sphere x2 + y 2 + z 2 = 6x − 4y + 10z .
(b) What is the intersection of this sphere with the yz -plane?
Example 6. Describe mathematically the top half of a solid sphere of radius 4 centered
at the origin.