Supporting QoS with Look-ahead Window Contention Farid Farahmand
advertisement

Supporting QoS with Look-ahead Window Contention
Resolution in Optical Burst Switched Networks
Farid Farahmand
Jason P. Jue
Department of Electrical Engineering
The University of Texas at Dallas
Richardson, Texas, TX 75083-0688
e-mail: ffarid@utdallas.edu
Department of Computer Science
The University of Texas at Dallas
Richardson, Texas, TX 75083-0688
e-mail: jjue@utdallas.edu
Abstract— Optical burst switching (OBS) has been proposed as a
competitive hybrid switching technology to support the nextgeneration optical Internet. This paper addresses the problem of
contention in OBS networks and introduces a new contention
resolution algorithm called Look-ahead window Contention
Resolution (LCR) that can also support service differentiation.
Simulation results show that the performance of LCR is
competitive to existing contention resolution mechanisms in terms
of reducing burst loss.
Contention and loss may be reduced by implementing
contention resolution policies. There are different types of
contention resolution techniques, such as time deflection (using
buffering) [5], space deflection (using deflection routing) [6],
and wavelength conversion (using wavelength converters) [7].
When a contention cannot be resolved by any one of these
techniques, one or more bursts must be dropped. The policy for
selecting which bursts to drop is referred to as the soft
contention resolution policy.
Keywords- Contention Resolution; Look-ahead Window; Optical
Burst Switching; Quality of Service (QoS)
A soft contention resolution algorithm may be utilized in
conjunction with a scheduling algorithm to protect high priority
bursts while reducing the overall burst loss rate. Thus, the
contention resolution algorithm is invoked only when no
available unscheduled channel can be found for a BHP request.
I.
INTRODUCTION
Exponential growth in Internet traffic has led to IP-overWDM as the core architecture for the next-generation optical
Internet. Optical burst switching (OBS) has been proposed as an
efficient way to satisfy the future bandwidth requirements of
such networks [1]. In OBS, IP packets are assembled into supersize packets called data bursts. These bursts are transmitted
following a burst header packet (BHP) after some offset time
[2]. Each BHP contains routing, scheduling, and packet priority
information and is processed electronically prior to its data burst
arrival. Consequently, when the data burst arrives, it can “cutthrough” the switch on the pre-assigned path with minimum
processing. Different signaling and scheduling mechanisms for
reserving and releasing resources have been proposed for OBS.
First-Fit, Horizon [3], Latest Available Unscheduled Channel
(LAUC), and Latest Available Unscheduled Channel with Void
Filling (LAUC-VF) [4], are among the proposed scheduling
algorithms. In both LAUC and LAUC-VF scheduling algorithms,
a burst chooses the unused channel that becomes available at the
latest time. When void filling (VF) is allowed, gaps between two
scheduled data bursts can also be utilized. In these schemes the
data burst reservation time starts at the beginning of the actual
burst arrival and lasts until the end of the burst.
A major concern in OBS networks is high contention and
burst loss. Typically, there are two main sources of burst loss:
contention on the outgoing data channels and contention on the
outgoing control channel. In this article we focus on output data
channel contention, which occurs when the total number of data
bursts going to the same output port at a given time is larger than
the available channels on that port. Contention is aggravated
when the traffic becomes bursty and when the data burst
duration varies and becomes longer.
Two well-defined soft contention resolution algorithms have
been proposed. One is based on dropping the latest arrival and
the other is based on dropping only the portions of the burst
involved in contention. In this paper we elaborate on the
performance of each of the above schemes as well as their QoS
supporting capacity. We also introduce two new algorithms
capable of handling service differentiation: look-ahead and
shortest drop contention resolution. The main contribution of
this paper is to provide an efficient algorithm in order to resolve
contention while minimizing burst loss.
In the subsequent sections we first briefly describe the system
configuration under consideration. Then, we provide detailed
descriptions pertaining to several proposed contention resolution
algorithms. Finally, we present performance results for each of
the introduced algorithms.
II. DESCRIPTION OF SOFT CONTENTION RESOLUTION
ALGORITHMS
In this section we describe the network under study, and
discuss details of different soft contention resolution algorithms.
A. Network assumptions
The network under discussion in this paper consists of a
number of edge nodes connected to a core optical network with
no buffering capacity. We assume that each link has a single
control channel and multiple data channels. A detailed
architecture of the core and edge nodes is provided in [4] and
[8]. The data burst transmission scheme can be either slotted or
unslotted. In this paper, we assume slotted transmission in which
0-7803-7975-6/03/$17.00 (C) 2003
data bursts and their corresponding BHPs are transmitted only
on the slot boundaries. Consequently, the offset time and the
duration of a data burst will be interpreted in units of slots.
Furthermore, we assume that incoming data bursts have different
service types with different QoS requirements. The maximum
burst length is assumed to be the same for all data bursts.
B. Latest Arrival Drop Policy (LDP)
The simplest soft contention resolution policy is the latestarrival drop policy (LDP). In LDP, the algorithm searches for an
available unscheduled channel (as in LAUC-VF), and if no such
channel is found, the latest incoming data burst will be
discarded. Although the processing speed of BHPs in the LDP
scheme is attractive, the main disadvantage of this technique is
that it has relatively poor performance with respect to data loss
when no buffers are utilized.
Inherently, LDP is not capable of differentiating packets with
different priority types. A novel scheme proposed by [9]
suggests that giving extra offset time to high priority data bursts
can ensure their early reservations. This approach is known as
offset-time-based QoS. The extra offset time must be large
enough to ensure that the blocking of high-priority bursts by
any lower-priority burst is minimized. Therefore, offset-timebased QoS is a tradeoff between guaranteeing lower loss for
high priority data bursts and increasing their end-to-end delay.
C. Look-ahead Window Contention Resolution (LCR)
The look-ahead contention resolution algorithm takes
advantage of the separation between the data bursts and the burst
header packets. By receiving BHPs one offset time (∆) prior to
their corresponding data bursts, it is possible to construct a lookahead window (LaW) with a size of W time units. Such a
collective view of multiple BHPs results in more efficient
decisions with regard to which incoming bursts should be
discarded or reserved. On the other hand, at each hop, the BHPs
must be stored for duration of W time units before they are
retransmitted (thus requiring ∆ ≥ W). Fiber delay lines (FDLs)
can be used on each hop to delay data bursts by W time units to
maintain the original offset time.
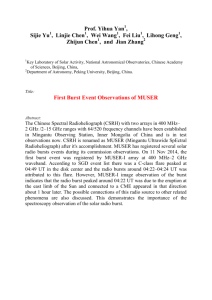
Figure 1(a) shows an example of the received BHPs for data
bursts that are destined for the same switch output port with two
available channels. Without loss of generality, we assume slotted
transmission with window size W=2×Lmax time slots (t19 through
t27), where Lmax is the maximum data burst duration in units of
time slots. Using the received burst header information, a burst
window can be constructed (Figure 1(b)) to describe the state of
the switch one offset time later (t19 + ∆ through t27 + ∆). Once
the burst arrival times within the burst window are determined,
the LCR algorithm is applied to the entire burst window range.
We define TSo and TSw as the starting and ending slots of each
burst window, respectively. The algorithm finds the contending
slots and then identifies which bursts should be discarded and
which should be scheduled. Note that hard decisions are only
applied to bursts when they reach the front of the burst window
at TSo (e.g., burst B1 in Figure 1(b)). The LaW and burst
window are advanced one slot at a time.
The look-ahead contention resolution algorithm can be divided
into three basic steps: (a) collecting all BHPs destined to the
same output port and creating a look-ahead window of size W;
(b) determining the contention regions (slots), CR, in each
corresponding burst window; (c) applying a heuristic algorithm
to decide which of the contending data bursts within the burst
window must be discarded.
Current
Time
Time
Time
Current Time + Offset
High QoS
9
9
6
87
B6
42
5
B2
B4
3
B8
B7
1
1
B5
B3
t28 t27 t26 t25 t24 t23 t22 t21 t20 t19
(a)
Look-ahead
Window
t45 t44 t43 t42 t41 t40 t39 t38 t37 t36 t35 t34 t33 t32 t31 t30 t29 t28
(b)
TSw
Burst Window
TSo
Figure 1. Look-ahead and burst windows for all bursts going to the same switch
output port with 2 channels; ∆=9, W=8, Lmax=4; X indicates contending regions.
Once the LaW is constructed and the arrival and departure
times of the incoming bursts are determined, the contention
resolution problem can be reduced to the following: if the
number of bursts directed to the same outgoing port on the
switch exceeds its available channels, how can we resolve the
contention while minimizing the BLR?
The contention problem can be solved by creating an auxiliary
directed graph G =(V, E) representing all the bursts in the LaW.
In this representation the finite set V of vertices (nodes)
identifies the starting and ending times of the bursts. That is V =
{(ts(1), ts(2), … ts(wb), te(1), te(2), …, te(wb)}, where ts(i) and te(i)
are the starting and ending times of data burst Bi, respectively,
and wb is the number of bursts in the LaW. The finite set E of
directed edges includes one directed edge for each burst. An
edge exists between vertices ts(i) and te(i) to represent burst Bi.
The weight of each edge is equivalent to the duration of its
corresponding data burst, L(Bi). Furthermore, we define a set of
contention regions, CR = {CR1, CR2, ...CRu} within the burst
window, where a contention region, CRi, is defined as a
continuous set of slots in which there is contention. By finding
the least-cost path from the beginning of the first contention
region to the end of the last contention region (CR1 through
CRu), we can find a set of data bursts that, if dropped, can
resolve the contention while minimizing data loss.
In order, to implement the shortest-path algorithm we need to
alter the original digraph G such that it is connected. Therefore,
we introduce a set of zero-weight directed edges (Zk+1,k) between
adjacent nodes k+1 and k when the following conditions exist:
(a) The adjacent nodes between contention resolution regions are
not strongly connected. This can occur when, for example, there
is a short halt in data burst transmissions. (b) The outer nodes of
contention regions are disconnected with their non-contending
adjacent nodes. This is due to the fact that only parts of data
bursts may be involved in contention and thus the shortest-path
solution may stretch beyond the contending slots.
The adjacent nodes within contention regions may also be
disconnected. This is because overlapping data bursts can end on
different time slots. Thus, in order to ensure graph connectivity
within contention regions we can add directed return paths,
Nk+1,k, between adjacent nodes k+1 and k. We now describe the
scheme in which the weight of return paths can be determined.
0-7803-7975-6/03/$17.00 (C) 2003
Let us define the contention degree, dTS, as the number of
unsuccessful bursts contending for an outgoing port in time slot
TS. The shortest-path solution must remove as many as dTS
overlapping data bursts on each time slot TS in the window. This
can be emphasized by having i negative-weight directed paths
(i )
between adjacent nodes k+1 and k ( N k +1, k , with i=0, 1, … ,dTS –
1). Having i = 0 implies that only one contending data burst must
be removed. Thus, in this case, we can assume that the weight of
the return path is zero (
N k( 0+)1, k = Z k +1, k = 0 ). On the other
hand, when i ≥ 1 the weight of each return path can be defined as
N k(i+)1, k = (−1) × Ek( ,jm− i −1) ,
where
E
( j)
k ,m
is the weight of the outgoing edge,
(1)
E
( j)
, from
node k to another arbitrary node m such that
Ek( j +1) > Ek( j )
.
The resulting connected digraph, including the zero and return
directed paths, can be represented by G` = (V, E`). The shortestpath algorithm can now be solved for G`. Consequently, the
solution can be obtained by implementing the Bellman-Ford
algorithm which has a complexity of Θ (|V|.|E`|). Other variants
of the Bellman-Ford algorithm can also be considered. In either
case, special care must be taken to ensure that no negative cycles
occur. Note that if the obtained shortest-path solution does not
eliminate all the contending bursts, the algorithm must be
repeated for the remaining contention regions.
Once the shortest-path algorithm is completed, a set of data
bursts, P ={Bx, By, …}, is obtained for possible discard. Only the
bursts with starting time equal to current time can be
permanently dropped.
The LCR algorithm can be readily modified to support service
differentiation. Let us assume that the class type for a data
c
burst Bi is defined by c, with cmax being the lowest priority
level. The starting and ending slots of burst Bi are denoted by
ts(i) and te(i), respectively. In this case, the weight of the edge
Et s (i ), t e ( i ) connecting node pairs ts(i) and te(i) in graph G` = (V,
E`) can be a function of the duration and the priority level of
burst Bi. That is
Et s ( i ),te (i ) = [cmax − c] ⋅ Lmax + L( Bic ) . (2)
Note that when all bursts have the same class priority, the edge
weights become equivalent to burst durations.
Several advantages can be attributed to the QoS-enabled LCR.
For instance, it can support unlimited number of classes of
service without requiring extra offset time. The LCR mechanism
can offer absolute as well as proportional differentiation. In
absolute differentiation the possibility of a high-priority burst
being blocked by any lower priority burst is eliminated. On the
other hand, in proportional differentiation the dropping criteria
will be based on the relative length and priority level of data
bursts. In such a scheme, it is possible that between a short
duration high priority burst and a long duration low priority
burst, the one with higher priority will be discarded. Clearly, in
B4=3
B5=2
t35
Z5=0
t34
Z4=0
t33
Z6=0
t32
Z3=0
B3=2
t31
Z7=0
t30
B1=1
Z2=0
B2=3
B6=[7]
CR2
CR1
t29
Z1=0
t28
Low QoS
High QoS
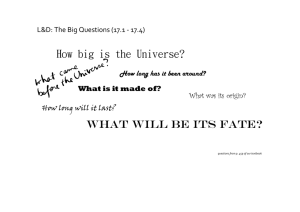
Figure 2. Directed graph, G` = (V, E`), partial representation of example
shown in Figure 1; for simplicity bursts with ts(i) beyond t35 are not shown;
Lmax=4; B6 is assumed to have high priority (c=1) and cmax = 2.
terms of complexity, minimal additional steps are required to
enable service differentiation in LCR.
At this point, we demonstrate the LCR approach by referring
to the example shown in Figure 1. We start by creating a
directed graph G = (V, E). The set of bursts within the lookahead window is represented by B = {B1, B2, … Bwb}, with wb =
9. Thus, there will be 9 edges with 11 distinct nodes in G, where
V = {t28, t29, t31, …, t38} and E = {(t28, t29), (t29, t31), (t29,
t32), …}. Moreover, CR = {CR1, CR2}, where CR1 = (t30, t31)
and CR2 = (t32, t33). Each edge (ts(i), te(i)) is assigned a weight
representing the burst Bi duration and its priority level.
Assuming cmax= 2, the weight of the edge (t32, 35) representing
B6 will be 7.
Figure 2 depicts the modified digraph G` after adding the zero
and return paths. Note that directed return paths of
N t(330),t 32 and
N t(310),t 30 are equivalent to zero-weight paths of Z6 and Z7,
respectively. This is because the degree of contention in these
time slots is one. Also, note that Zt28,t29 has been replaced by the
edge representing B1. Solving the shortest-path problem, we find
D = {B4, B7}. This indicates that by discarding B4 and B7 all
contentions can be eliminated. However, since none of these
data bursts arrive at the starting slot of the window (TSo=t28) no
burst will actually be dropped until the window reaches the start
of either burst.
D. Shortest Burst Drop Policy (SDP)
In order to reduce the end-to-end data burst delay in LCR,
different variations of this algorithm can be considered. The
tradeoff, of course, will be performance degradation. For
example, if we reduce the window size to Lmax, the incoming
data bursts can experience shorter per hop delay, but the advance
viewing capacity of the window will be decreased. The window
size can also be minimized to a single slot. In this scheme, each
incoming burst slot will be checked, and upon detecting
contention, the lower priority burst with the shortest duration
and latest arrival time will preferentially be dropped. This allows
BHPs to be processed and transmitted soon after they are
received. We call this scheme the shortest drop policy (SDP).
One drawback of such a policy is its potential over-reserving of
resources, since some earlier reservations may be eliminated
later. In other words, the reservation for BHPi can potentially be
cancelled within the next ∆i slots before the associated data burst
arrives.
In terms of supporting class differentiation, SDP can support
unlimited number of priority levels and requires no extra offset
assignments for bursts with higher service requirements. It also
0-7803-7975-6/03/$17.00 (C) 2003
guarantees complete class isolation. In addition, SDP offers
proportional differentiation, as described above.
High QoS (c=1)
B7-5
Using Segmentation, individual slots of B2, B3, B5, and B8 can
be isolated and dropped. In this case, we ignore the impacts of
extra overhead requirements in order to divide data busts into
independent segments.
We then consider the LCR algorithm with W=2×Lmax=14.
Therefore, the weights associated to the high-priority data burst
B4 and B6 will be 12 and 9, respectively. The edge weights
representing low priority bursts will be equivalent to their
durations. Table 1 summarizes the resulting performance using
different contention resolution algorithms. Note that LPD can
potentially result in the worst-case performance while the SEG
technique provides an upper bound on performance.
B. Simulation Results
In this section, simulation results are presented for each of the
contention resolution schemes, namely the Latest Drop Policy
(LDP), Shortest Drop Policy (SDP), Look-ahead Contention
Resolution (LCR), and Segmentation (SEG). These results are
obtained with the following assumptions:
•
•
The network consists of a single bufferless core switch with
4 input/output ports and each port consists of 8 data
channels and a single control channel.
We assume synchronous slotted switching mechanism with
the slot size granularity of 16000 bytes.
B2-5
B4-12
B5-3
TS
TS
TS
TS
TS
33
32
31
30
29
Time
X
X
X
X
X
TS
TS
TS
TS
TS
TS
TS
TS
TS
TS
28
27
26
25
24
23
22
21
20
19
C
R
Contention
Region
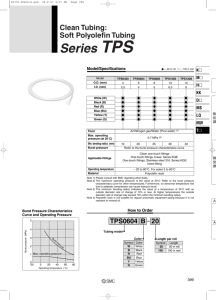
Figure 3. Example of incoming bursts (Bi); all bursts are directed to
the same destination port, N=2, Lmax=7, cmax = 2.
TABLE 1. PERFORMANCE RESULTS OF IMPLEMENTING VARIOUS
CONTENTION RESOLUTIONS FOR THE EXAMPLE IN FIGURE 3
Drop Policy
Bursts Dropped
Slots Dropped
LDP
B1, B7, B8
10
SDP
B1, B5, B8
8
LCR
B1, B5
7
SEG
B2(2), B3, B5(1), B8
5
III. PERFORMANCE COMPARISON
A. Numerical comparison between different soft contention
resolution algorithms
Figure 3 shows the expected incoming bursts from different
ingress ports between time slots 19 though 33. We assume all
bursts (B1-B8) have the same destination address and each
outgoing port of the switch has only 2 wavelengths (N=2). First,
we implement the LAUC-VF scheduling algorithm without
utilizing any contention resolution algorithm. We assume highpriority data bursts, namely B4 and B6, were reserved much in
advance. In this case the latest contending request will be
dropped. Thus, discarding B1, B7, and B8 can be considered as
the worst-case outcome.
B1-4
B8
B3
E. Segmentation Drop Policy (SEG)
The basic assumption in this scheme is that each transmitted
data burst consists of individual independent segments such as
slots. Therefore, if contention occurs, only the segments of the
lower priority burst involved in the contention will be removed.
Details of this mechanism, known as Segmentation, along with
its variations are described in [10]. Although the QoS-enabled
Segmentation algorithm appears to be straightforward, the
hardware implementation in terms of burst assembly and
disassembly, as well as overhead insertion and extraction, can be
complex.
In this section we present the simulation results for each of the
introduced policies. We start by applying these algorithms to a
simple example where packets can have low or high priority
levels.
B6-9
Low QoS (c=2)
•
•
The maximum data burst duration is 20 slots.
Wavelength conversions are utilized on all output ports of
the switch.
• Data bursts can have three distinct priority levels, c=1, 2, 3,
with distribution ratio of 10%, 30%, and 60%, respectively.
• Inter-arrival times between BHPs are exponentially
distributed.
• Source-destination pairs are assigned based on a uniform
distribution.
• Offsets between BHPs and their associated data bursts are
fixed.
We represent the simulation results in terms of utilization, and
burst loss rate. Utilization, G, is the ratio of the total number of
burst slots generated in the network per unit time. The burst loss
rate, BLR, is the percentage of burst slots that are sent by the
source but never received by the destination.
Figure 4(a) shows the overall performance of LCR compared
to SEG and LDP algorithms. Note that, as expected, SEG and
LDP provide the upper and lower bounds on performance,
respectively. On average the LCR performs about 20% better
than LDP. The impact of the window size in LCR is shown in
Figure 4(b). Note that as the window size increases, the burst
loss rate decreases. This figure suggests that the bulk of
improvement is accomplished when W is between Lmax and
2Lmax.
Further simulation results (not shown here) indicate that the
LCR performance is slightly better than SDP due to its deeper
viewing ability. However, in a multi-switch system the overall
burst loss rate using the SDP algorithm can actually be reduced
due to its potential over-reservation. As we noted before, a major
issue with LCR is its per hop delay, which is equivalent to W
time slots. The SDP can be considered as a reasonable tradeoff
between reducing delay and slightly lowering the performance.
The resulting burst loss ratio for all three classes of service using
LCR is shown in Figure 5(a). These results can be compared
with Figure 5(b), which depicts loss for individual classes using
LDP. The performance results of the lower two classes are
transposed on each other in Figure 6.
0-7803-7975-6/03/$17.00 (C) 2003
IV. CONCLUSION
1
0
0.2
0.4
0.6
0.8
1
0.1
BLR
0.01
We discussed each algorithm and its implementation
complexity and examined its performance in terms of burst loss
rate for different classes of service. Simulation results show that
the look-ahead contention resolution algorithm can readily
support service differentiation and offers high overall
performance with moderate complexity. The LCR algorithm can
be modified to reduce the total end-to-end burst delay at the cost
of slightly lowering the performance.
LDP
LCR
SEG
0.001
0.0001
0.00001
(a)
Utilization (G)
0.1
W80
W40
BLR
0.075
We presented several contention resolution algorithms for
optical burst switching networks, namely the Latest Drop Policy,
Shortest Drop Policy, Look-ahead Contention Resolution, and
Segmentation.
W20
W05
0.05
REFERENCES
0.025
[1]
0
0.25
0.50
0.76
0.83
0.85
0.86
Utilization (G)
(b)
Figure 4. (a) Overall BLR performance using different contention resolution
schemes with W=40, Lmax= 20 slots; (b) LCR overall performance with window
sizes (W): 5, 20, 40, 80 with Lmax= 20.
BLR
0.1 0
0.2
0.4
0.6
0.8
1
0.001
0.00001
0.0000001
Utilization (G)
LCR-C3
BLR
0.1 0
LCR-C2
0.2
0.4
(a)
LCR-C1
0.6
0.8
1
0.001
0.00001
0.0000001
Utilization (G)
LDP-C3
LDP-C2
(b)
LDP-C1
C. Qiao and M. Yoo, “Optical Burst Switching (OBS) – A New Paradigm
for an Optical Internet,” Journal of High Speed Networks, vol. 8, no.1,
pp.69-84, Jan. 1999.
[2] M. Yoo and C. Qiao, “Just-Enough-Time (JET): A High Speed Protocol for
Bursty Traffic in Optical Networks,” IEEE/LEOS Conf. on Technologies
for a Global Information Infrastructure, pp. 26-27, Aug. 1997.
[3] J.S. Turner, “Terabit burst switching,” Journal of High Speed Networks,
vol. 8, no. 1, pp. 3-16, Jan. 1999.
[4] Y. Xiong, M. Vanderhoute, and H.C. Cankaya, “Control Architecture in
Optical Burst-Switched WDM Networks,” IEEE Journal on Selected Areas
in Communications, vol. 18, no. 10, pp. 1838-1851, Oct. 2000.
[5] C. Gauger, “Dimensioning of FDL Buffers for Optical Burst Switching
Nodes,” Proceedings, Optical Network Design and Modeling (ONDM)
2002, Torino, Italy, 2002.
[6] X. Wang, H. Morikawa, and T. Aoyama, “A Deflection Routing Protocol
for Optical Bursts in WDM Networks,” Proceedings, Fifth Optoelectronics
and Communications Conference (OECC) 2000, Makuhari, Japan, pp. 9495, July 2000.
[7] S. Yao, B. Mukherjee, S. J. B. Yoo, and S. Dixit, “All-optical packet
switching for Metropolitan Area Networks: Opportunities and Challenges,”
IEEE Communication Magazine, vol. 39, no. 3, pp. 142-148, March 2001.
[8] F. Callegati, H.C. Cankaya, Yijun Xiong, and M. Vandenhoute, “Design
issues of optical IP routers for Internet backbone applications,” IEEE
Communications Magazine, vol. 37, no 12, pp. 124-128, Dec. 1999.
[9] M. Yoo and C. Qiao, “Supporting Multiple Classes of Services in IP over
WDM Networks,” Proceedings, IEEE GLOBECOM 1999, Brazil, pp.
1023-1027, Dec. 1999.
[10] V. Vokkarane, J. Jue, and S. Sitaraman, “Burst Segmentation: An
Approach for Reducing Packet Loss in Optical Burst Switched Networks,”
Proceedings, IEEE International Conference on Communications (ICC)
2002, New York, NY, vol. 5, pp. 2673-2677, April 2002.
Figure 5. BLR performance for all three classes using (a) LCR (b) LDP. C1
indicates the highest priority level.
1
BLR
0.1 0
0.2
0.4
0.6
0.8
1
0.01
0.001
0.0001
0.00001
0.000001
Utilization (G)
LCR-C3
LCR-C2
LDP-C3
LDP-C2
Figure 6. BLR comparison of classes 2 and 3 in LDP and LCR.
0-7803-7975-6/03/$17.00 (C) 2003