Introduction to Machine Learning 1.2 Kernel Regression
advertisement

1.2 Kernel Regression
1.2
2
Kernel Regression
• Ridge regression estimate:
Introduction to Machine Learning
• Prediction at x∗ :
CSE474/574: Kernel Methods
w = (λID + X> X)−1 X> y
y ∗ = w> x∗ = ((λID + X> X)−1 X> y)> x∗
• Still needs training and test examples as D length vectors
Varun Chandola <chandola@buffalo.edu>
• Rearranging above (Sherman-Morrison-Woodbury formula or Matrix Inversion Lemma [See Murphy
p120, Matrix Cookbook])
y ∗ = y> (λIN + XX> )−1 Xx∗
Outline
The above mentioned “rearrangement” can be obtained using the Matrix Inversion Lemma, which in
general term states for matrices E,F,G,H:
Contents
(E − FH−1 G)−1 FH−1 = E−1 F(H − GE−1 F)−1
1 Kernel Methods
1.1 Extension to Non-Vector Data Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Kernel Regression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1
1
2 Kernel Trick
2.1 Choosing Kernel Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Constructing New Kernels Using Building Blocks . . . . . . . . . . . . . . . . . . . . . . .
3
3
3
Consider the prediction equation for ridge regression (we use the fact that (λID + X X) is a square and
symmetric matrix):
3 Kernels
3.1 RBF Kernel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Probabilistic Kernel Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Kernels for Other Types of Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
4
4
5
Using the result in (1) with a = λ, F = X, and X> = G:
4 More About Kernels
4.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Gaussian Kernel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
5
5
5 Kernel Machines
5.1 Generalizing RBF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
7
Setting H = I and E = −aI, where a is a scalar value, we get:
(aI + FG)−1 F = F(aI + GF)−1
y ∗ = ((λID + X> X)−1 X> y)> x∗
= y> X(λID + X> X)−1 x∗
y ∗ = y> (λIN + XX> )−1 Xx∗
XX> ?
Xx∗ ?
1
hx1 , x1 i hx1 , x2 i
hx2 , x1 i hx1 , x2 i
>
XX =
..
..
.
.
hxN , x1 i hxN , x2 i
hx1 , x∗ i
hx2 , x∗ i
Xx∗ =
..
.
Extension to Non-Vector Data Examples
• What if x ∈
/ <D ?
• Does w> x make sense?
hxN , x∗ i
• Consider a set of P functions that can be applied on input example x
• How to adapt?
1. Extract features from x
2. Is not always possible
• Sometimes it is easier/natural to compare two objects.
– A similarity function or kernel
• Domain-defined measure of similarity
Example 1. Strings: Length of longest common subsequence, inverse of edit distance
Example 2. Multi-attribute Categorical Vectors: Number of matching values
· · · hx1 , xN i
· · · hx2 , xN i
..
..
.
.
· · · hxN , xN i
Kernel Methods
1.1
(1)
>
• Prediction:
φ = {φ1 , φ2 , . . . , φP }
φ2 (x1 ) · · · φP (x1 )
φ2 (x2 ) · · · φP (x2 )
..
..
..
.
.
.
φ1 (xN ) φ2 (xN ) · · · φP (xN )
φ1 (x1 )
φ1 (x2 )
Φ = ..
.
y ∗ = y> (λIN + ΦΦ> )−1 Φφ(x∗ )
• Each entry in ΦΦ> is hφ(x), φ(x0 )i
We have already seen one such non-linear transformation in which one attribute is expanded to {1, x, x2 , x3 , . . . , xd
2. Kernel Trick
2
3
Kernel Trick
3. Kernels
3
4
Kernels
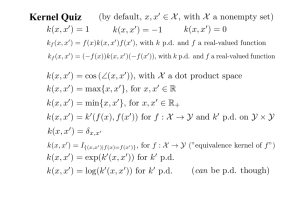
• Replace dot product hxi , xj i with a function k(xi , xj )
• If K is positive definite - Mercer Kernel
• Replace XX> with K
• K - Gram Matrix
• Radial Basis Function or Gaussian Kernel
1
k(xi , xj ) = exp − 2 kxi − xj k2
2σ
• k - kernel function
• Cosine Similarity
K[i][j] = k(xi , xj )
k(xi , xj ) =
– Similarity between two data objects
Kernel Regression
y ∗ = y> (λIN + K)−1 k(X, x∗ )
x>
i xj
kxi kkxj k
One can start with a Mercer kernel and show through the Mercer’s theorem how it can be expressed
as an inner product. Since K is positive definite we can compute an eigenvector decomposition:
K = U> ΛU
2.1
Choosing Kernel Functions
Each element of K can be rewritten as:
• Already know the simplest kernel function:
k(xi , xj ) =
1
x>
i xj
1
Let φ(xi ) = Λ 2 U:,i . Then we can write:
Kij = φ(xi )> φ(xj )
Approach 1: Start with basis functions
k(xi , xj ) = φ(xi )> φ(xj )
Approach 2: Direct design (good for non-vector inputs)
3.1
RBF Kernel
• Measure similarity between xi and xj
• Gram matrix must be positive semi-definite
• k should be symmetric
For instance, consider the following kernel function for two-dimensional inputs, (x = (x1 , x2 )):
k(x, z) =
=
=
=
(x> z)2
x21 z12 + 2x1 z1 x2 z2 + x22 z22
√
√
(x21 , 2x1 x2 , x22 )> (x2z , 2z1 z2 , z22 )
φ(x)> φ(z)
where the feature mapping φ(x) is defined as:
√
φ(x) = (x21 , 2x1 x2 , x22 )>
2.2
Constructing New Kernels Using Building Blocks
k(xi , xj )
k(xi , xj )
k(xi , xj )
k(xi , xj )
k(xi , xj )
k(xi , xj )
=
=
=
=
=
=
ck1 (xi , xj )
f (x)k1 (xi , xj )f (xj )
q(k1 (xi , xj )) q is a polynomial
exp(k1 (xi , xj ))
k1 (xi , xj ) + k2 (xi , xj )
k1 (xi , xj )k2 (xi , xj )
1
Kij = (Λ 2 U:,i )> (Λ 2 U:,j )
1
k(xi , xj ) = exp − 2 ||xi − xj ||2
2σ
• Mapping inputs to an infinite dimensional space
Whenever presented with a “potential” kernel function, one needs to ensure that it is indeed a valid kernel.
This can be done in two ways, one through functional analysis and second by decomposing the function
into a valid combination of valid kernel functions. For instance, for the Gaussian kernel, one can note that:
||xi − xj ||2 = x> xi + (xj )> xj − 2x>
i xj
Which means that the Gaussian kernel function can be written as:
k(xi , xj ) = exp(
x> xj
(xj )> xj
x>
i xi
)exp( i 2 )exp(
)
2
2σ
2σ
2σ 2
All three individual exponents are valid covariance functions and hence the product of these is also a valid
covariance function.
3.2
Probabilistic Kernel Functions
• Allows using generative distributions in discriminative settings
• Uses class-independent probability distribution for input x
k(xi , xj ) = p(xi |θ)p(xj |θ)
• Two inputs are more similar if both have high probabilities
Bayesian Kernel
k(xi , xj ) =
Z
p(xi |θ)p(xj |θ)p(θ)dθ
3.3 Kernels for Other Types of Data
5
5. Kernel Machines
6
5
0
x
−5
−8 −6 −4 −2
0
2
4
6
8
50
40
30
20
10
0
x2
40
Kernels for Other Types of Data
k(xi , xj ) = exp(−x2i )exp(−x2j )exp(2xi xj )
∞
X
2k xki xkj
= exp(−x2i )exp(−x2j )
k!
k=0
∞
k/2
X 2
2k/2
√ xki exp(−x2i )
√ xkj exp(−x2j )
=
k!
k!
k=0
• Pyramid Kernels
More About Kernels
4.1
Motivation
• x∈<
• Using Maclaurin Series Expansion
• No linear separator
k(xi , xj ) =
• Map x → {x, x2 }
1
21/2 x1 exp(−x2 )
i
2/2 i
2 x2 exp(−x2 )
2 i
i
..
.
• Separable in 2D space
×
1
>
21/2 x1j exp(−x2j )
2/2
2 x2 exp(−x2 )
2 j
j
..
.
One can note above that since computing the Gaussian kernel is same as taking a dot product of two
vectors of infinite length, it is equivalent to mapping the input features into an infinite dimensional space.
• x∈<
2
• No linear separator
√
• Map x → {x21 , 2x1 x2 , x22 }
5
Kernel Machines
• We can use kernel function to generate new features
• A circle as the decision boundary
4.2
0−20
0 20
10
• Assume σ = 1 and x ∈ < (denoted as x)
• String Kernel
4
20
• What about the Gaussian kernel (radial basis function)?
1
k(xi , xj ) = exp − 2 ||xi − xj ||2
2σ
x
3.3
30
• Evaluate kernel function for each input and a set of K centroids
φ(x) = [k(x, µ1 ), k(x, µ2 ), . . . , k(x, µK )]
Gaussian Kernel
• The squared dot product kernel (xi , xj ∈ <2 ):
k(xi , xj ) = xi > xj , φ(xi )> φ(xj )
√
φ(xi ) = {x2i1 , 2xi1 xi2 , x2i2 }
y = w> φ(x),
y ∼ Ber(w> φ(x))
• If k is a Gaussian kernel ⇒ Radial Basis Function Network (RBF)
• How to choose µi ?
– Clustering
– Random selection
5.1 Generalizing RBF
5.1
7
Generalizing RBF
• Another option: Use every input example as a “centroid”
φ(x) = [k(x, x1 ), k(x, x2 ), . . . , k(x, xN )]
References