Part XII, Chapter B Functional Analysis
advertisement

Part XII, Chapter B
Functional Analysis
This appendix collects the main concepts and results on functional analysis used in this book. These include Lipschitz sets in Rd , Fréchet derivatives, Hölder and Lebesgue spaces, distributions and distributional derivatives,
Sobolev spaces (with integral or fractional order), and the de Rahm complex.
Most of the results are stated without proof, the reader being referred to specialized textbooks for deeper insight; see, e.g., Adams and Fournier [4], Bartle
[38], Brezis [97], Evans [225], Grisvard [251], Malý and Ziemer [342], Rudin
[399], Sobolev [428], Tartar [443], Yosida [483].
In this book, vectors in Rd and vector-valued functions are denoted in bold
font. We also abuse the notation by denoting position vectors in Rd , d ≥ 2,
in bold font as well.
B.1 Lipschitz sets, domains, and polyhedra
Definition B.1 (Lipschitz set). An open subset D of R is said to be strongly
Lipschitz if it is a finite union of non-empty open intervals, such that any pair
of distinct intervals have disjoint closures. An open subset D of Rd , d ≥ 2, is
said to be Lipschitz if its boundary ∂D satisfies the following property: There
are α > 0, β > 0, a finite number R of affine maps Tr : Rd−1 × R → Rd and
Lipschitz maps Φr : B(0, α) ⊂ Rd−1 −→ R such that
∂D =
R
[
r=1
Tr ({(ξ, η) | ξ ∈ B(0, α), η = Φr (ξ)}),
(B.1)
and for all r ∈ {1: R},
Tr ({(ξ, η) | ξ ∈ B(0, α), Φr (ξ) < η < Φr (ξ) + β}) ⊂ int(D),
Tr ({(ξ, η) | ξ ∈ B(0, α), Φr (ξ) − β < η < Φr (ξ)}) ⊂ Rd \D,
(B.2)
(B.3)
796
Appendix B. Functional Analysis
where B(0, α) is the open ball of radius α in Rd−1 , int(D) denotes the interior
of the set D, and D its closure.
T1
β
β
α
T2
D
∂D
β
β
α
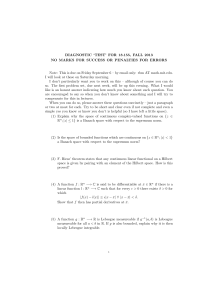
Fig. B.1. Example of a Lipschitz set with the mappings (T 1 , Φ1 ), (T 2 , Φ2 ), . . .
Definition B.2 (Domain). An open, bounded, connected, strongly Lipschitz
set in Rd is generically called a domain in this book. The adverb “strongly”
will systematically be omitted in the book. For d ≥ 2, a domain D is said to
be of class C m or piecewise of class C m , m ≥ 1, if all the local maps Φr in
Definition B.1 are of class C m or piecewise of class C m , respectively.
Remark B.3 (Outward normal). The outward-pointing unit normal n is
well defined for a.e. x ∈ ∂D, for any Lipschitz set D in Rd . For domains of
class C m , m ≥ 1, the unit outward normal is defined for all x ∈ ∂D and is
a function of class C m−1 . For d = 1 and an interval (a, b), the unit outward
normal is conventionally −1 at a and +1 at b.
⊓
⊔
Remark B.4 (Slits). Definition B.1 implies that a Lipschitz set is necessarily located on one side of its boundary, i.e., it excludes sets with slits (or
cuts). Such an assumption can be weakened; see, e.g., Costabel and Dauge
[168], Grisvard [251, §1.7].
⊓
⊔
Another useful property is the (uniform) cone property.
Definition B.5 (Cone property). Let D be an open subset of Rd . We say
that D has the uniform cone property if there is r > 0 and a cone C with
vertex at 0 ∈ Rd (i.e., C = {(ξ, η) ∈ Rd−1 ×R | kξkℓ2 (Rd−1 ) < η tan(θ)} with
θ ∈ (0, π2 ]) such that for every x0 ∈ ∂D there is a rotation Tx0 about the
origin such that B(x0 , r) ∩ D + Tx0 (C) ⊂ D.
Lemma B.6 (Lipschitz set and cone property). A bounded open subset
D of Rd has the (uniform) cone property if and only if it is Lipschitz.
Proof. See [251, Thm. 1.2.2.2].
⊓
⊔
Part XII. Appendices
797
O
Fig. B.2. Example of a non-Lipschitz set: the two-brick assembly.
Remark B.7 (Two-brick assembly). Consider the set resulting from the
assembly of two bricks as depicted in Figure B.2. This set is not (strongly)
Lipschitz since in the neighborhood of the point O, its boundary cannot be
described by the graph of a Lipschitz function.
⊓
⊔
A simple example of a domain in Rd , d ≥ 2, is a polyhedron, for which we
now give a recursive definition with respect to d, see Figure 1.2 for examples
in dimensions d ∈ {2, 3}.
Definition B.8 (Polyhedron). In dimension d = 1, a polyhedron is a onedimensional simplex, i.e., an interval [xl , xr ] with real numbers xl < xr . In
dimension d ≥ 2, a polyhedron in Rd is a compact, connected subset of Rd
with non-empty interior and whose boundary is a finite union of images by
affine maps of polyhedra in Rd−1 . In R2 , a polyhedron is called a polygon.
Let K be a polyhedron in Rd , d ≥ 2. Owing to Definition B.8, there
exists a finite number of distinct affine hyperplanes, say {Hi }i∈{1: I} , such
that Hi ∩ ∂K is the image by an affine map of a polyhedron in Rd−1 .
Definition B.9 (Faces, edges, and vertices). The (d − 1)-dimensional
manifolds Hi ∩ ∂K, i ∈ {1: I}, are called the faces of K. The l-faces of K,
for all l ∈ {0: d−1}, are defined recursively as follows: The (d−1)-faces of S
are the faces of K, and, for d ≥ 2, the l-faces of K with l ∈ {0: d−2} are the
faces of the (l+1)-faces of K seen as polyhedra in Rl+1 . The 1-faces of K are
called its edges, and its 0-faces are called its vertices. In dimension d = 2, the
notions of edge and face coincide. In dimension d = 1, the notions of vertex,
edge, and face coincide.
Remark B.10 (Non-planar faces). In this book, the faces of a polyhedron
are supposed to be planar (i.e., they are part of an affine hyperplane), and its
edges are supposed to be straight lines.
⊓
⊔
798
Appendix B. Functional Analysis
B.2 Differential calculus
B.2.1 Fréchet derivatives
Let V , W be two Banach spaces and let U be an open set in V . The space
C 0 (U ; W ) consists of those functions f : U → W that are continuous in U .
Definition B.2.1 (Fréchet derivative). Let V , W be two Banach spaces,
let U be an open set in V, and let f ∈ C 0 (U ; W ). We say that f is Fréchet
differentiable (or differentiable) at x ∈ U if there is a bounded linear operator
Df (x) ∈ L(V ; W ) such that
lim
h→0
kf (x + h) − f (x) − Df (x)(h)kW
= 0.
khkV
(B.4)
The operator Df (x) is called the Frechet derivative of f at x. If the mapping
Df : U → L(V ; W ) is continuous, we say that f is is class C 1 in U , and we
write f ∈ C 1 (U ; W ).
The above process can be repeated to define D(Df )(x). Upon identifying L(V ; L(V ; W )) with B(V, V ; W ) (the space spanned by bilinear maps
from V ×V to W ), and setting D2 f (x) := D(Df )(x), we have D2 f (x) ∈
B(V, V ; W ). The n-th Fréchet derivative of f at x is defined recursively as
being the Fréchet derivative of Dn−1 f at x for all n ≥ 2, and denoting by
Mn (V, . . . , V ; W ) the space spanned by multilinear maps from V × . . . ×V (n
times) to W , we infer that
Dn f (x) ∈ Mn (V, . . . , V ; W ).
| {z }
n times
If the mapping Dn f : U → Mn (V, . . . , V ; W ) is continuous, we write f ∈
C n (U ; W ).
Lemma B.11 (Leibniz product rule). Let f ∈ C n (U ; W1 ), g ∈ C n (U ; W2 ),
n ≥ 1, and b ∈ B(W1 , W2 ; W3 ), where U is an open set in V and V, W1 , W2
are Banach spaces. Then, the following holds for all x ∈ U :
Dn b(f (x), g(x)) =
n X
n
l=0
l
b(Dn−l f (x), Dl g(x)),
∀x ∈ U.
(B.5)
Lemma B.12 (Clairault, Schwarz). Let V , W be two Banach spaces. Let
n ≥ 2 and let Sn be the set of the permutations of {1: n}. Let f ∈ C n (U ; W )
where U is an open set in V. Then, Dn f is symmetric, i.e.,
Dn f (x)(h1 , . . . , hn ) = Dn f (x)(hσ(1) , . . . , hσ(n) ),
for all σ ∈ Sn and all h1 , . . . , hn ∈ V .
∀x ∈ U,
(B.6)
Part XII. Appendices
799
Lemma B.13 (Chain rule). Let f ∈ C n (U ; W1 ) and g ∈ C n (W1 ; W2 ), n ≥
1, where V , W1 , W2 are Banach spaces and let U be an open set in V . Then,
Dn (g◦f )(x)(h1 , . . . , hn ) =
n
X X
X
σ∈Sn l=1 1≤r1 +...+rl =n
1
×
l!r1 ! . . . rl !
(B.7)
Dl g(f (x))(Dr1f (x)(hσ(1) , . . . , hσ(s1 ) ), . . . , Drlf (x)(hσ(sl−1 +1) , . . . , hσ(n) )).
with s0 = 0, s1 = r1 , s2 = r1 + r2 , . . . , sl−1 = r1 + . . . + rl−1 .
Proof. See e.g., Cartan [128, pp. 28-96], Ciarlet and Raviart [144, p. 227].
⊓
⊔
B.2.2 Partial derivatives: gradient, Jacobian, Hessian
A typical situation is V = Rd and W = Rm (or W = Cm ). In this case, one can
consider the Cartesian basis of Rd , say (e1 . . . ed ). Let U be an open set of Rd .
We say that f is differentiable in the direction ei at x ∈ U if there is an element
in W , say ∂i f (x) ∈ W , such that limt→0 |t|−1 (f (x + tei ) − f (x) − t∂i f (x)) =
0. (Note that h in (B.4) is an element of V while t ∈ R.) If f is Frechet
differentiable at x, it is differentiable along any direction ei for i ∈ {1: d} (the
converse is not necessarily true), and ∂i f (x) = Df (x)(ei ).
For m = 1, one adopts the convention that the gradient of f at x, say
∇f (x), is the column vector with components (∇f (x))i = ∂i f (x) for all
d
i ∈ {1: d}. Identifying h with
P a column vector in R , the action of Df (x)
is such that Df (x)(h) = i∈{1: d} ∂i f (x)hi = (∇f (x), h)ℓ2 (Rd ) for all h =
P
d
d
i∈{1: d} hi ei ∈ R , where (·, ·)ℓ2 (Rd ) denotes the Euclidean product in R .
m
For m ≥ 2, one considers a basis of R and introduces the m×d Jacobian
matrix of f at x, say Jf (x), with entries (Jf (x))ij = ∂j fi (x) where fi is the
i-th component of f in the chosen basis. Then Df (x)(h) = Jf (x)h; if m = 1,
Jf (x) is the tranpose of the gradient of f at x, i.e., Jf (x) = (∇f (x))T .
More generally, let α = (α1 , . . . , αd ) ∈ Nd be a multi-index; the number
|α| = α1 + . . . + αd is called the length of α. Then for f ∈ C n (U ; W ) and any
multi-index α of length n, we write
∂ α f (x) := Dn f (x)(e1 , . . . , e1 , . . . , ed , . . . , ed ),
| {z }
| {z }
×α1
(B.8)
×αd
so that ∂ α f (x) = ∂1 . . . ∂1 . . . ∂d . . . ∂d f (x), and the order of the partial deriva| {z } | {z }
×α1
×αd
tives is irrelevant owing to Lemma B.12. For instance, for W = R (or W = C),
one introduces the (symmetric) d×d Hessian matrix of f at x, say Hf (x), with
entries (Hf )ij = ∂ij f (x), and one obtains D2 f (x)(h1 , h2 ) = hT
1 Hf (x)h2 =
hT
H
(x)h
.
1
2 f
800
Appendix B. Functional Analysis
B.3 Lipschitz and Hölder spaces
We define Lipschitz and Hölder spaces in this section.
Definition B.14 (Lipschitz and Hölder functions). Let D be an open set
in Rd and let W be a Banach space. We say that v : D → W is Lipschitz
continuous (in short, Lipschitz) in D and write v ∈ C 0,1 (D; W ) if there is a
constant L such that
kv(y) − v(z)kW ≤ Lky − zkℓ2 (Rd ) ,
∀y, z ∈ D.
(B.9)
The function v is said to be Hölder continuous with exponent γ (in short,
Hölder) in D if there is a constant C and an exponent γ ∈ (0, 1] such that
kv(y) − v(z)kW ≤ Cky − zkγℓ2 (Rd ) ,
∀y, z ∈ D.
(B.10)
We write v ∈ C 0,γ (D; W ). For an integer k ≥ 1, we write v ∈ C k,γ (D; W ) if
v ∈ C k (D) and the partial derivatives of v up to order k are in C 0,γ (D; W ).
Since regularity is required up to the boundary to equip the above spaces
with a simple topology, we are lead to the following additional definitions.
Definition B.15 (Regularity to the boundary). Let D be an open set in
Rd . Let W be a Banach space. For any integer k ≥ 0, C k (D; W ) consists of
the functions of C k (D; W ) whose the partial derivatives up to order k admit
a continuous extension to D. For any γ ∈ (0, 1], we say that v ∈ C k,γ (D; W )
if v ∈ C k (D; W ) and there is a constant C such that
k∂ α v(y) − ∂ α v(z)kW ≤ Cky − zkγℓ2 (Rd ) ,
∀y, z ∈ D,
(B.11)
for any multi-index α ∈ Nd with length |α| = k, i.e., ∂ α v ∈ C 0,γ (D; W ).
Proposition B.16 (Banach spaces). Let D be an open bounded set in Rd ,
let W be a Banach space, let k ∈ N and define kvkC 0 (D;W ) := supx∈D kv(x)kW .
Then C k (D; W ) is a Banach space when equipped with the norm:
X
(B.12)
kvkC k (D;W ) =
k∂ α vkC 0 (D;W ) ,
|α|≤k
where the summation is done over the multi-indices α ∈ Nd of length |α| ≤ k.
For γ ∈ (0, 1], C k,γ (D; W ) is a Banach space when equipped with the norm:
kvkC k (D;W ) = kvkC k (D;W ) + max sup
|α|=k y,z∈D
k∂ α v(y) − ∂ α v(z)kW
.
ky − zkγℓ2 (Rd )
(B.13)
Proof. This is a simple consequence of D being compact in Rd and W being
a Banach space.
⊓
⊔
Part XII. Appendices
801
B.4 Lebesgue spaces
Lebesgue spaces are introduced in this section and various important properties thereof are reviewed.
B.4.1 Measure theory
A collection M of subsets of Rd is called a σ-algebra if
(i) ∅ ∈ M;
d
(ii) A
S ∈ M implies (R \ A) ∈ M;
(iii) k∈N Ak ∈ M whenever Ak ∈ M for all k ∈ N.
An element of M is called a measurable subset of Rd . There exists a σ-algebra
M on Rd and a map | · | : M → [0, ∞], called the (d-dimensional) Lebesgue
measure, such that
d
d
(i) Every
open subset
P of R (and thus every closed subset of R ) is in M;
S
(ii) | k∈N Ak | =
k∈N |Ak | whenever all the sets Ak ∈ M, k ∈ N, are
mutually disjoint;
(iii) If A ⊂ B with B ∈ M and |B| = 0, then A ∈ M and |A| = 0;
(iv) If B is a ball in Rd , |B| equals the d-dimensional volume of B.
Let D ∈ M be a measurable subset of Rd . A function f : D → R is said
to be measurable if f −1 (U ) ∈ M for any open subset U ⊂ R. In particular,
functions that are piecewise continuous and, more generally, all the functions
that are integrable in the Riemann sense, are measurable. We say that g :
D −→ R is a simple non-negative function if there exit m ∈ N, a collection of
measurable sets {Ak }1≤k≤mPin D, and a collection of non-negative numbers
m
{vk }1≤k≤m such
R that g =Pm k=1 vk 1Ak . The Lebesgue integral of g over D
is defined by D g dx := k=1 |Ak |vk . Let f be a non-negative measurable
function, the Lebesgue integral of f over D is defined in [0, ∞] as follows:
Z
o
nZ
g dx | g is a simple non-negative and g ≤ f .
f dx = lim sup
D
D
This definition agrees with the Riemann integral of f if f is Riemannintegrable.
Let fR be measurable but not necessarily non-negative. If either
R +
f
(x)
dx
or D f − (x) dx isRfinite, where fR ± := max(±f,R0), the Lebesgue
D
integral of f is defined to be D f (x) dx = D f + (x) dx − D f − (x) dx. We
say that f is (Lebesgue-)integrable on D if both summands are finite, and we
set
Z
Z
Z
|f (x)| dx =
f + (x) dx +
f − (x) dx.
D
D
D
R
R
Observe that, by construction, D f (x) dx ≤ D |f (x)| dx.
An important
property of the Lebesgue integral is that if f is integrable
R
on D, then D |f (x)| dx = 0 if and only if f vanishes everywhere on D up
to a set of zero Lebesgue measure. This leads us to introduce a notion of
802
Appendix B. Functional Analysis
equivalence classes. Two functions are said to belong to the same class if they
coincide almost everywhere (henceforth, a.e.), i.e., everywhere but on a set of
zero Lebesgue measure. Elements of Lebesgue spaces are, strictly speaking,
equivalence classes, although we refer to them simply as functions that are
defined almost everywhere. For instance, the function φ : (0, 1) → {0, 1} that
is 1 on the rational numbers and is zero otherwise is in the same equivalence
class as the zero function. Hence, φ = 0 a.e. on (0, 1). Integrals are always
understood in the Lebesgue sense throughout
this book.
R Whenever the context
R
is unambiguous, we simply write D f dx instead of D f (x) dx. We refer to
[399, Chap. 1] for more elaborate notions on the measure theory.
B.4.2 The space L1 (D)
Definition B.17 (Space L1 ). Let D be an open set in Rd . We call L1 (D)
the vector space composed of all the real-valued functions that are LebesgueR
integrable on D and we equipped L1 (D) with the norm kf kL1 (D) = D |f | dx
to make it a normed space.
Theorem B.18 (Tonelli). Let f R: D1 ×D2 → R be a measurable function
such that the function D1 ∋ x1 7→ D2 |f (x1 , x2 )| dx2 is finite a.e. in D1 and
is in L1 (D1 ), then f ∈ L1 (D1 × D2 ).
⊓
⊔
Proof. See [97, Thm. 4.4].
Theorem B.19 (Fubini). Let f ∈ L1 (D1 ×D2 ). Then, the function D2 ∋
1
x
2 ) for a.e. x1 ∈ D1 , and the function D1 ∋ x1 7→
R 2 7→ f (x1 , x2 ) is in L (D
1
f
(x
,
x
)
dx
is
in
L
(D
1
2
2
1 ). Similarly, the function D1 ∋ x1 7→ f (x1 , x2 )
D2
R
1
is in L (D1 ) for a.e. x2 ∈ D2 , and the function D2 ∋ x2 7→ D1 f (x1 , x2 ) dx1
is in L1 (D2 ). Moreover,
Z Z
Z Z
(B.14)
f (x1 , x2 ) dx2 dx1 =
f (x1 , x2 ) dx1 dx2 ,
D1
D2
D2
D1
R
and both quantities are equal to D1 ×D2 f (x1 , x2 ) dx1 dx2 , where dx1 dx2 is
the product measure on the Cartesian product D1 ×D2 .
Proof. See [97, Thm. 4.5].
⊓
⊔
Theorem B.20 (Lebesgue’s Dominated Convergence). Let (fn )n∈N be
a sequence of functions in L1 (D) such that:
(i) fn (x) → f (x) a.e. in D.
(ii) There is g ∈ L1 (D) such that |fn (x)| ≤ g(x) a.e. in D for all n ∈ N.
Then, f ∈ L1 (D) and fn → f in L1 (D).
Proof. See for instance [38, p. 123], [97, Thm. 4.2], [399, Thm. 1.34].
⊓
⊔
Part XII. Appendices
803
B.4.3 The spaces Lp (D)
Definition B.21 (Lp spaces). Let D be an open set in Rd . For all p ∈ [1, ∞],
let Lp (D) = {f measurable | kf kLp (D) < ∞}, where
Z
p1
, if p ∈ [1, ∞),
(B.15)
kf kLp (D) =
|f |p dx
D
kf kL∞ (D) = ess sup |f (x)| = inf{M | |f (x)| ≤ M a.e. on D}.
(B.16)
x∈D
Theorem B.22 (Fischer–Riesz). Let p ∈ [1, ∞], then Lp (D) is a Banach
space when equipped with the Lp -norm from Definition B.21.
Proof. See [4, Thm. 2.16], [38, p. 142], [97, Thm. 4.8], [399, Thm. 3.11].
⊓
⊔
Theorem B.23 (Density of C0∞ (D)). Let D be an open set in Rd , then
C0∞ (D) is dense in Lp (D) for all p ∈ [1, ∞).
Proof. See [399, Thm. 3.14].
Remark B.24 (The case of L∞ (D)). C0∞ (D) is not dense in L∞ (D). If D
is bounded, the completion of C ∞ (D) in L∞ (D) is C 0 (D), and the completion
of C0∞ (D) is {v ∈ C 0 (D) | v|∂D = 0}.
Lebesgue’s Dominated Convergence Theorem extends to all the Lp spaces,
p ∈ [1, ∞], i.e., if the dominating function g is in Lp (D) the convergence of fn
to f occurs in Lp (D). We state the following converse statement.
Theorem B.25 (Point-wise convergence). Let p ∈ [1, ∞]. Let (fn )n∈N
be a sequence in Lp (D) and let f ∈ Lp (D) such that kfn − f kLp (D) → 0.
Then, there exist a subsequence (fnk )k∈N and a function g ∈ Lp (D) such that
fnk (x) → f (x) a.e. in D and |fnk (x)| ≤ g(x) a.e. in D for all k ∈ N.
Proof. See [97, Thm. 4.9], [399, Thm. 3.12].
⊓
⊔
Definition B.26 (Conjugate). Let a real number p ∈ [1, ∞]. The real number p′ ∈ [1, ∞] such that p1 + p1′ = 1, with the convention that p′ = 1 if p = ∞
and p′ = ∞ if p = 1, is called the conjugate of p.
Lemma B.27 (Hölder’s inequality). Let p ∈ [1, ∞] and let p′ be its con′
jugate. Let f ∈ Lp (D) and g ∈ Lp (D). Then, f g ∈ L1 (D) and
Z
(B.17)
|f g| dx ≤ kf kLp (D) kgkLp′ (D) .
D
Proof. See [4, Thm. 2.4], [38, p. 404], [97, Thm. 4.6], [399, Thm. 3.8].
⊓
⊔
804
Appendix B. Functional Analysis
Remark B.28 (Continuous embedding on bounded sets). Assume
that D is a bounded set. Then, for all p, q ∈ [1, ∞] with p ≤ q, Hölder’s
inequality implies that
1
1
kf kLp (D) ≤ |D| p − q kf kLq (D) ,
∀f ∈ Lq (D),
(B.18)
meaning that Lp (D) ֒→ Lq (D). An immediate consequence of (B.18) is also
that limp→∞ kf kLp (D) = kf kL∞ (D) for all f ∈ L∞ (D). Furthermore, one can
show, see [4, Thm. 2.14], that if f ∈ Lp (D) for all p ∈ [1, ∞) and if there is
c uniform with respect to p such that kf kLp (D) ≤ c, then f ∈ L∞ (D) and
kf kL∞ (D) ≤ c.
⊓
⊔
Theorem B.29 (Riesz’ Representation Theorem). Let p ∈ [1, ∞). The
′
dual space of Lp (D) can be identified with Lp (D).
Proof. See [4, pp. 45-49], [97, Thm. 4.11&4.14], [428, §I.3.3], [399, Thm. 6.16].
⊓
⊔
Remark B.30 (Reflexivity). One important consequence of Theorem B.29
is that Lp (D) is reflexive if p ∈ (1, ∞). However, L1 (D) and L∞ (D) are not
reflexive. The dual of L1 (D) is L∞ (D), but the dual of L∞ (D) strictly contains
L1 (D); see [97, p. 102].
⊓
⊔
The following corollary is an easy consequence of Hölder’s inequality:
Corollary B.31 (Interpolation inequality). Let p, q ∈ [1, ∞] with p ≤ q
and let θ ∈ [0, 1]. Let r ∈ [1, ∞] be such that 1r = pθ + 1−θ
q . Then,
1−θ
kf kLr (D) ≤ kf kθLp (D) kf kL
q (D) ,
∀f ∈ Lp (D) ∩ Lq (D).
(B.19)
Theorem B.32 (Riesz-Thorin). Let p0 , p1 , q0 , q1 be four real numbers such
that 1 ≤ p0 ≤ p1 ≤ ∞, 1 ≤ q0 ≤ q1 ≤ ∞. Let T : Lp0 (D) + Lp1 (D) −→
Lq0 (D)+Lq1 (D) be a linear operator that maps Lp0 (D) and Lp1 (D) boundedly
to Lq0 (D) and Lq1 (D), respectively. Then the operator T maps Lpθ (D) boundθ
edly to Lqθ (D) for all θ ∈ (0, 1), where pθ and qθ are defined by p1θ = 1−θ
p0 + p1 ,
1−θ
1−θ
θ
1
θ
q
p
qθ = q0 + q1 . Moreover kT kL(L θ ;L θ ) ≤ kT kL(Lp0 ;Lq0 ) kT kL(Lp1 ;Lq1 ) .
Proof. See [443, Thm. 21.2], Bergh and Löfström [47, Chap. 1].
⊓
⊔
Remark B.33 (Interpolation theory). Theorem B.32 is closely related to
the interpolation theory between Banach spaces, (see Theorem A.35). For instance, the Lp spaces with p ∈ (1, ∞) can be defined by interpolating between
L1 and L∞ . More precisely, the following holds with equivalent norms:
Lp (D) = [L1 (D), L∞ (D)] 1′ ,p ,
p
where p′ is the conjugate of p; see [443, p. 111].
(B.20)
⊓
⊔
Part XII. Appendices
805
B.4.4 The space L2 (D)
Among all the Lebesgue spaces, L2 (D) plays a particular role owing to the
following important consequence of the Fischer–Riesz Theorem:
Theorem B.34 (L2 space). For real-valued functions, L2 (D) is a Hilbert
space when equipped with the inner product
Z
(f, g)L2 (D) =
f g dx.
(B.21)
D
In the complex case, we define (f, g)L2 (D) =
R
D
f g dx.
Hölder’s inequality becomes the Cauchy–Schwarz inequality in L2 (D):
Z
|f g| dx ≤ kf kL2 (D) kgkL2 (D) ,
∀f, g ∈ L2 (D).
D
In the real and complex
case, this inequality is useful to bound |(f, g)L2 (D) |
R
since |(f, g)L2 (D) | ≤ D |f | |g| dx.
B.5 Distributions
B.5.1 The space C0∞ (D)
Definition B.35 (Space C0∞ (D)). Let D be an open set in Rd . The support
in D of a function ϕ : D → R is defined to be the closure in D of the subset
{x ∈ D | ϕ(x) 6= 0}. We denote by C0∞ (D) the space composed of the functions
from D to R that are C ∞ and whose support is compact in D.
Theorem B.36 (Density). Let D be an open set in Rd . Let p ∈ [1, ∞).
Then, C0∞ (D) is dense in Lp (D).
Proof. See [4, Thm. 2.19], [97, Cor. 4.23], [399, Thm. 3.14].
⊓
⊔
Definition B.37 (Space L1loc (D)). Let D ∈ M. The elements of the space
L1loc (D) = {v measurable | ∀compact K ⊂ D, v|K ∈ L1 (K)},
(B.22)
are called locally integrable functions.
Lemma
Let D ⊂ Rd be open. Let v ∈ L1loc (D),
R B.38 (Vanishing integral).
∞
then D vϕ dx = 0, for all ϕ ∈ C0 (D) if and only if v = 0 a.e. in D.
Proof. See [97, Cor. 4.24], [342, p. 6].
⊓
⊔
806
Appendix B. Functional Analysis
B.5.2 Basic definition and examples
Definition B.39 (Distributions). Let D be an open set in Rd . A linear map
v : C0∞ (D) ∋ ϕ 7−→ hv, ϕi ∈ R or C,
(B.23)
is said to be a distribution in D if and only if the following property holds:
For any compact subset K of D, there exist an integer p and a constant c
(both can depend on K) such that
|hv, ϕi| ≤ c max sup |∂ α ϕ(x)|,
|α|≤p x∈K
(B.24)
for all ϕ ∈ C0∞ (D) such that supp(ϕ) ⊂ K.
Example B.40 (Locally integrable functions). Every function v in
L1loc (D) can be identified with the following distribution:
Z
v̌ : C0∞ (D) ∋ ϕ 7−→ hv̌, ϕi :=
vϕ dx.
D
This identification is possible owing to Lemma B.38, since
two functions
v, w ∈
R
R
L1loc (D) are such that v = w a.e. in D if and only if D vϕ dx = D wϕ dx for
all ϕ ∈ C0∞ (D). We abuse the notation by writing v instead of v̌.
⊓
⊔
Example B.41 (Dirac mass). Let a be a point in D. The Dirac mass (or
Dirac measure) at a is the distribution
δx=a : C0∞ (D) ∋ ϕ 7−→ hδx=a , ϕi = ϕ(a).
1
Note that
there is no function f ∈ L1 (D) such
that
R
R δx=a 6∈ L (D), i.e.,
∞
ϕ(a) = D f ϕ dx, for all ϕ ∈ C0 (D). Otherwise, one would have 0 = D f ϕ dx
for all functions ϕ ∈ C0∞ (D\{a}), which, owing to Lemma B.38, would imply
that f = 0 a.e. in D\{a}, i.e., f = 0 a.e. in D.
⊓
⊔
Proposition B.42 (Multiplication by smooth function). Let D be an
open set in Rd . Let ψ ∈ C ∞ (D). Let v be a distribution in D. Then, the map
C0∞ (D) ∋ ϕ 7−→ hv, ψϕi defines a distribution in D denoted ψv.
B.5.3 Distributional derivative
The notion of distributional derivative extends the notion of pointwise (or
classical) derivative. This new notion allows for the differentiation of functions that are not differentiable in the classical sense. When v ∈ L1loc (D),
distributional derivatives of v are sometimes called weak derivatives. The key
to the distribution theory is that every distribution is differentiable in the
following sense:
Part XII. Appendices
807
Definition B.43 (Distributional derivative). Let v be a distribution in D
and let i ∈ {1: d}. The distributional derivative ∂i v is the distribution in D
acting as follows:
∂i v : C0∞ (D) ∋ ϕ 7−→ h∂i v, ϕi := −hv, ∂i ϕi.
(B.25)
More generally, for a multi-index α ∈ Nd , the distributional derivative ∂ α v
is the distribution in D acting as h∂ α v, ϕi = (−1)|α| hv, ∂ α ϕi. We set conventionally ∂ 0 v = v and ∇v = (∂1 v, . . . , ∂d v)T .
Example B.44 (Step function). Let D = (−1, 1) and consider the function
v(x) = 1 − |x| in L1loc (D). The first and second weak derivatives of v are
(
1 if x < 0,
∂x v =
∂xx v = −2δx=0 .
−1 if x > 0,
This example is fundamental.
⊓
⊔
Proposition B.45 (Clairaut/Schwarz). Let v be a distribution in D and
let α, β ∈ Nd . Then, ∂ α (∂ β v) = ∂ β (∂ α v).
Proof. Use Definition B.43 and Lemma B.12.
⊓
⊔
A function v is said to be locally Lipschitz in D if, for all x ∈ D, there is
a neighborhood Nx of x in D and a constant Lx such that v satisfies (B.9)
with constant Lx for all y, z ∈ Nx .
Theorem B.46 (Rademacher). Let D be an open set in Rd . Let f be a
locally Lipschitz function in D. Then, f is differentiable in the classical sense
a.e. in D, and the classical and weak derivatives of f coincides a.e. in D.
Proof. See [225, p. 280], [342, p. 44].
⊓
⊔
B.6 Sobolev spaces
In this section, we introduce integer- and fractional-order Sobolev spaces. The
scale of Sobolev spaces plays a central role in finite element error analysis.
B.6.1 Integer-order spaces
Definition B.47 (W m,p (D)). Let m ∈ N and p ∈ [1, ∞]. Let D be an open
set of Rd . We define
W m,p (D) := {v ∈ L1loc (D) | ∂ α v ∈ Lp (D), ∀α ∈ Nd s.t. |α| ≤ m},
where the derivatives are understood in the distributional sense.
(B.26)
808
Appendix B. Functional Analysis
We equip the Sobolev space W m,p (D) with the norm
kvkW m,p (D) =
X
|α|≤m
k∂ α vkpLp (D)
kvkW m,∞ (D) = max k∂ α vkL∞ (D) ,
|α|≤m
p1
,
∀p ∈ [1, ∞),
(B.27a)
(B.27b)
where the summation is done over the multi-indices α ∈ Nd of length |α| ≤ m.
We also consider the seminorms
p1
X
|v|W m,p (D) =
k∂ α vkpLp (D)
, ∀p ∈ [1, ∞),
(B.28a)
|α|=m
|v|W m,∞ (D) = max k∂ α vkL∞ (D) ,
(B.28b)
|α|=m
Proposition B.48 (Banach space). W m,p (D) is a Banach space when
equipped with the norm defined by (B.27). For p = 2, the space
H m (D) := W m,2 (D)
(B.29)
is a realRHilbert space when equipped with the inner product (v, w)H m (D) :=
P
α
α
m
|α|≤m D ∂ v ∂ w dx. The same result holds for the complex space H (D; C)
R α
P
with (v, w)H m (D) := |α|≤m D ∂ v ∂ α w dx.
Proof. See e.g., [4, Thm. 3.3], [225, p. 249], or [443, Lem. 5.2].
equivalent norm?
⊓
⊔
Remark B.49 (Scaling). Definition (B.27) mixes quantities that may have
different units (see [443, p. 50]). Let ℓD be some length scale associated with
D, for instance ℓD = diam(D) if D bounded, a better way to define a norm
P
1
|α|p
in W m,p (D) could be to set kvkW m,p (D) = ( |α|≤m ℓD k∂ α vkpLp (D) ) p or
1
p
p
kvkW m,p (D) = (kvkpLp (D) + ℓmp
D |v|W m,p (D) ) . We nevertheless adopt definition
(B.27) in this book, unless specified otherwise, under the assumption that the
independent space variables have been made non-dimensional by using some
reference length scale ℓD .
Lemma B.50 (Kernel of ∇). Let D ⊂ Rd be open and connected. Let v ∈
W 1,p (D), p ∈ [1, ∞]. Then ∇v = 0 a.e. on D if and only if v is constant.
Proof. See [342, p. 24], [443, Lem. 6.4].
⊓
⊔
Lemma B.51 (Space translates). Let D be an open set of Rd and let
v ∈ Lp (D) with p ∈ (1, ∞]. Then v ∈ W 1,p (D) if and only if there exists
c such that the following holds for all ω ⊂⊂ D and all h ∈ Rd such that
ω + khkℓ2 B(0, 1) ⊂⊂ D: kτh v − vkLp (ω) ≤ ckhkℓ2 where τh v(x) := v(x + h);
moreover, it is possible to take c = k∇vkLp (D) .
Part XII. Appendices
809
⊓
⊔
Proof. See [97, Prop. 9.3], [225, p. 277], [342, p. 27].
Remark B.52 (Lipschitz functions). Let D be an open set in Rd . The
space of Lipschitz functions C 0,1 (D) is closely related to the Sobolev space
W 1,∞ (D). Indeed, C 0,1 (D)∩L∞ (D) is continuously embedded into W 1,∞ (D);
conversely, if v ∈ W 1,∞ (D), then |v(y) − v(z)| ≤ dD (y, z)k∇vkL∞ (D) for all
y, z ∈ D, where dD (y, z) denotes the geodesic distance of y to z in D, i.e.,
the shortest length of a smooth path connecting y to z in D (if D is convex,
dD (y, z) = ky − zkℓ2 (Rd ) ); see [443, Lem. 7.8]. A set D ⊂ Rd is said to be
quasi-convex, if there exists C > 1 and if every pair of points x, y ∈ D can
be joined by a curve γ in D such that length(γ) ≤ Ckx − ykℓ2 . It can be
shown that W 1,∞ (D) = C 0,1 (D) ∩ L∞ (Ω) if D is quasi-convex and open, i.e.,
W 1,∞ (D) = C 0,1 (D) if D is quasi-convex, open, and bounded.
⊓
⊔
B.6.2 Fractional-order spaces
Definition B.53 (W s,p (D)). Let s ∈ (0, 1) and p ∈ [1, ∞]. Let D be an open
set of Rd . We define
W s,p (D) := v ∈ Lp (D) | |v|W s,p (D) < ∞ ,
(B.30)
where
|v|W s,p (D) :=
Z Z
D
|v(x) − v(y)|p
D
kx − yksp+d
ℓ2
while |v|W s,∞ (D) := ess supx,y∈D
dx dy
|v(x)−v(y)|
kx−yks2 .
! p1
,
p < ∞,
(B.31)
Let now s > 1; we define
ℓ
W s,p (D) := {v ∈ W m,p (D) | ∂ α v ∈ W σ,p (D), ∀α, |α| = m},
(B.32)
where m = ⌊s⌋ and σ = s − m. Finally, we denote H s (D) := W s,2 (D).
Definition B.54 (Sobolev–Slobodeckij norm). For all v ∈ W s,p (D) with
1
s ∈ (0, 1), we set kvkW s,p (D) := (kvkpLp (D) + |v|pW s,p (D) ) p for p < ∞,
and kvkW s,∞ (D) := max(kvkL∞ (D) , |v|W s,∞ (D) ). Equipped with this norm,
W s,p (D) is a Banach space (and a Hilbert space if p = 2).
⊓
⊔
Proof. Add ref
Remark B.55 (Definition by interpolation). Fractional-order Sobolev
spaces can also be defined by interpolation between Lp (D) and W 1,p (D). Let
s ∈ (0, 1) and p ∈ [1, ∞). Let D be an open bounded Lipschitz set in Rd .
Then, the following holds with equivalent norms:
W s,p (D) = [Lp (D), W 1,p (D)]s,p ,
(B.33)
and for any integer m ≥ 1, W m+s,p (D) = [W m,p (D), W m+1,p (D)]s,p with
equivalent norms; see [443, Lem. 36.1].
⊓
⊔
810
Appendix B. Functional Analysis
Example B.56 (Power functions). Let D = (0, 1) and consider the function v(x) = xα where α ∈ R. One can verify that v ∈ L2 (D) if α > − 12 ,
v ∈ H 1 (D) if α > 21 , and, more generally v ∈ H s (D) if α > s − 12 .
⊓
⊔
Example B.57 (Hölder functions). A direct verification shows that if D
is bounded and p ∈ [1, ∞], C 0,α (D) ֒→ W s,p (D) provided 0 < s < α ≤ 1 ⊓
⊔
Maybe move this
on multiplication to
where we need it
(PDE with variable
coefficients)
Proposition B.42 shows that it is possible to multiply a distribution u in
D by a smooth function ψ ∈ C ∞ (D). This is also the case if u ∈ W s,p (D),
and less regularity is required for the function ψ. We denote by C0k,α (D) the
space of all the functions defined in D that are restrictions to D of functions
in C k,α (Rd ) with compact support.
Proposition B.58 (Multiplication by smooth function). Let s > 0 and
p ∈ [1, ∞). Let u ∈ W s,p (D). Let ψ ∈ C0k,α (D) with k + α ≥ s when s
is an integer and k + α > s otherwise. Then, ψu ∈ W s,p (D) and there is
C, depending on ψ, s, and p such that kψukW s,p (D) ≤ CkukW s,p (D) for all
u ∈ W s,p (D).
Proof. See [251, Thm. 1.4.1.1].
I would prefer a
statement on polyhedra; perhaps directly in the section
on traces
⊓
⊔
Remark B.59 (Sobolev spaces on manifolds). It is also useful to consider Sobolev spaces on manifolds, e.g., the boundary of D. Using mappings,
it is possible to define W s,p (∂D) whenever ∂D is a smooth manifold; see [251,
§1.3.3].
⊓
⊔
s,p
f s,p (D), W0s,p (D), W00
B.6.3 The spaces W
(D)
For any function v ∈ L1 (D), we denote by ve the extension by zero of v over
Rd , i.e., ve(x) = v(x) if x ∈ D and ve(x) = 0 otherwise.
f s,p (D)). Let s > 0 and p ∈ [1, ∞]. Let D ⊂ Rd be an
Definition B.60 (W
open set. We define
f s,p (D) := {v ∈ W s,p (D) | ve ∈ W s,p (Rd )}.
W
(B.34)
e s (D) := W
f s,2 (D).
For p = 2, we write H
Theorem B.61 (Banach space). Equipped with the norm kvkW
f s,p (D) :=
s,p
f (D) is a Banach space. Moreover, kvk f s,p
ke
v kW s,p (Rd ) , W
= kvkW s,p (D)
W
(D)
if s ∈ N, while if s 6∈ N and D is a bounded Lipschitz set, kvkW s,p (D) is
R
P
1
equivalent to the norm (kvkpW s,p (D) + |α|=m D (ρ(x))−σp |∂ α v|p dx) p , where
m = ⌊s⌋, σ = m − s, and ρ(x) is the distance from x to ∂D, i.e., ρ(x) =
inf y∈∂D kx − ykℓ2 .
Proof. See [251, Thm. 1.3.2.6], [443, Lem. 37.1].
⊓
⊔
Part XII. Appendices
811
Definition B.62 (W0s,p (D)). Let s ∈ (0, 1) and p ∈ [1, ∞). Let D be an open
set in Rd . We define
W0s,p (D) := C0∞ (D)
W s,p (D)
.
(B.35)
For p = 2, we write H0s (D) := W0s,2 (D).
f s,p (D)). Let s > 0
Theorem B.63 (Links between W s,p (D), W0s,p (D), W
and p ∈ (1, ∞). Let D be an open bounded Lipschitz set in Rd . Then, the
following holds:
f s,p (D)
W s,p (D) = W0s,p (D) = W
W
s,p
(D) =
W s,p (D) 6=
W0s,p (D)
W0s,p (D)
For all s ≥ 1, (B.36c) holds if s −
proper subspace of W s,p (D).
(sp < 1),
(B.36a)
(D)
(sp = 1),
(B.36b)
f s,p (D)
=W
(sp > 1).
(B.36c)
f s,p
6= W
1
p
6∈ N, and for all s >
1
p,
W0s,p (D) is a
Proof. See [251, Thm. 1.4.2.4, Cor. 1.4.4.5], [443, Chap. 33], see also Lions
and Magenes [333, Thm. 11.1].
⊓
⊔
Remark B.64 (D = Rd ). The case D = Rd is particularly simple since
f s,p (Rd ) for all s > 0 and all p ∈ [1, ∞), see [251,
W0s,p (Rd ) = W s,p (Rd ) = W
p. 24], [443, Lem. 6.5].
⊓
⊔
One possibility to circumvent the difficulty in Theorem B.63 for s =
to consider interpolation spaces.
1
p
is
s,p
Definition B.65 (W00
(D)). Let s ∈ (0, 1) and p ∈ (1, ∞). Let D be an open
bounded Lipschitz set in Rd . We define
s,p
W00
(D) := [Lp (D), W01,p (D)]s,p .
(B.37)
s,2
s
For p = 2, we write H00
(D) := W00
(D).
s,p
f s,p (D)). Let s ∈
Proposition B.66 (Links between W0s,p (D), W00
(D), W
(0, 1) and p ∈ (1, ∞). Let D be an open bounded Lipschitz set in Rd . Then
s,p
f s,p (D), and if s 6= 1 , W s,p (D) = W s,p (D).
W00
(D) ⊂ W
00
0
p
s,p
Proof. See [443, Lem. 37.1] or [251, Thm. 1.4.4.4]. Note that W00
(D) ⊂
s,p
f (D) follows from Theorem A.35 since the zero-extension operator maps
W
⊔
boundedly Lp (D) to Lp (Rd ) and W01,p (D) to W 1,p (Rd ) (since 1 − p1 6∈ N). ⊓
english version of Lions Magenes
812
Appendix B. Functional Analysis
B.6.4 Negative-order Sobolev spaces
These spaces are defined by duality using W0s,p (D). This allows one to identify
negative-order Sobolev spaces with a space of distributions in D.
Definition B.67 (W −s,p (D)). Let s > 0 and p ∈ (1, ∞). Let D be an open
′
′
set in Rd . We define W −s,p (D) := W0s,p (D) with p1 + p1′ = 1. W −s,p (D) is
equipped with the norm
kvkW −s,p (D) =
hv, wi
.
′
kwkW s,p′ (D)
w∈W s,p (D)
sup
(B.38)
0
For p = 2, we write H −s (D) := W −s,2 (D).
Remark B.68 (s = 0). Let p ∈ (1, ∞). Since W 0,p (D) = Lp (D), Theorem B.36 implies that W00,p (D) = Lp (D), so that the notation W −s,p (D) for
s = 0 is coherent with the Riesz–Fréchet Representation Theorem.
⊓
⊔
Example B.69 (Dirac mass). Some of the objects contained in W −s,p (D)
are not functions but distributions. For instance, if sp′ > d, the Dirac mass
at a point x ∈ D is in W −s,p (D).
⊓
⊔
Example B.70 (Derivatives). If Φ ∈ Lp (D), then ∂i Φ ∈ W −1,p
P (D) for all
i ∈ {1: d}, and for all m ∈ N, v ∈ W −m,p (D) if and only if v = |α|≤m ∂ α Φα
with functions Φα ∈ Lp (D); see [97, Prop. 9.20] (for m = 1), [4, Thm. 3.9].
For s ∈ (0, 1) and p ∈ (1, ∞), ∂i ∈ L(W s,p (D); W s−1,p (D)) if D is an open
bounded Lipschitz set and sp 6= 1, see [251, Thm. 1.4.4.6].
⊓
⊔
Remark B.71 (Interpolation). Let s ∈ (0, 1), p ∈ (1, ∞), and W −1,p (D)
from Definition B.67. Let us set W̌ −s,p (D) := [W −1,p (D), Lp (D)]1−s,p . The′
′
s,p′
(D))′ .
orem A.38 implies that W̌ −s,p (D) = [Lp (D), W01,p (D)]′s,p′ = (W00
Owing to Theorem B.63, we infer that W −s,p (D) = W̌ −s,p (D) if D is an open
bounded Lipschitz set and sp 6= 1.
⊓
⊔
B.7 De Rham complex
this section to be
completed
Let D be an open set of Rd with d ∈ {2, 3}. The de Rham complex consists
of a sequence of functional spaces and differential operators that describes
important properties of the most usual differential operators encountered in
PDEs: the gradient, curl, and divergence operators.
Part XII. Appendices
813
B.7.1 Gradient, curl, and divergence
For v ∈ L1loc (D), we denote by ∇v the column vector with components ∂i v
for all i ∈ {1: d}. Consider now a vector-valued function v ∈ L1loc (D) :=
L1loc (D; Rd ) with components vi for all i ∈ {1: d}. Its divergence is defined as
X
∇·v =
∂i vi .
(B.39)
i∈{1: d}
Another important differential operator is the curl operator. In the threedimensional case (d = 3), ∇×v is a column vector in R3 with components
(∇×v)i = εijk ∂j vk (with summation of repeated indices) for all i ∈ {1: 3},
where ε denotes the Levi-Civita symbol; in component form,
∇×v = (∂2 v3 − ∂3 v2 , ∂3 v1 − ∂1 v3 , ∂1 v2 − ∂2 v1 )T .
(B.40)
Key properties of these operators (which follow from Lemma B.12) are
∇×(∇v) = 0,
∇·(∇×v) = 0.
(B.41)
In the two-dimensional case (d = 2), there are two differential operators that
can play the role of the curl operator. Let R π2 be the rotation of angle π2
in R2 , i.e., for x = (x1 , x2 )T ∈ R2 , R π2 x = (−x2 , x1 )T . Then, for a scalarvalued function v ∈ L1loc (D), we write ∇⊥ v := R π2 ∇v = (−∂2 v, ∂1 v)T and
for a vector-valued function v ∈ L1loc (D), we write ∇×v := −∇·(R π2 v) =
∂1 v2 −∂2 v1 . The key properties (B.41) become ∇×(∇v) = 0 and ∇·(∇⊥ v) = 0.
B.7.2 de Rham complex in D
Let p ∈ [1, ∞] and let us set Lp (D) := Lp (D; Rd ). Let us define the following
spaces for d = 3:
Z g,p (D) := {f ∈ Lp (D) | ∇f ∈ Lp (D)} = W 1,p (D),
Z c,p (D) := {g ∈ Lp (D) | ∇×g ∈ Lp (D)},
Z d,p (D) := {g ∈ Lp (D) | ∇·g ∈ Lp (D)}.
(B.42a)
(B.42b)
(B.42c)
The superscript g refers to the gradient operator, c to the curl operator, and
d to the divergence operator. The spaces Z c,p (D) and Z d,p (D) are Banach
spaces when equipped with the norms such that kgkZ c,p (D) = (kgkpLp (D) +
1
1
k∇×gkpLp (D) ) p and kgkZ d,p (D) = (kgkpLp (D) +k∇·gkpLp (D) ) p , respectively. For
p = 2, all the spaces in (B.42) are Hilbert spaces, and the notation H 1 (D),
H(curl; D), H(div; D), and L2 (D) is used.
Definition B.72 (Exact sequence). A sequence of linear operators between
A
A
I
1
BI is said to be exact if the range of each
B1 . . . −→
Banach spaces B0 −→
operator in the sequence (except the last one) is equal to the kernel of the next
operator in the sequence.
814
Appendix B. Functional Analysis
Theorem B.73 (de Rham complex). Assume that D is simply connected
and that ∂D is connected. The following sequence is exact:
∇
i
∇×
∇·
o
R −→ Z g,p (D) −→ Z c,p (D) −→ Z d,p (D) −→ Lp (D) −→ {0},
(B.43)
where i maps a real number to the constant function taking this value, and o
is the zero operator.
⊓
⊔
Proof. See ???
Remark B.74 (Exactness). The inclusions im(Ai ) ⊂ ker(Ai+1 ) for the
sequence (B.43) follow from (B.41) and trivial properties of the operators i
and o. The converse inclusions are more interesting. They mean that: (i) for
all Z g,p (D), ∇f = 0 iff f is constant; (ii) for all g ∈ Z c,p (D), ∇×g = 0 iff
g = ∇ψ for some ψ ∈ Z g,p (D); (iii) for all g ∈ Z d,p (D), ∇·g = 0 iff g = ∇×ψ
for some ψ ∈ Z c,p (D); (iv) for all f ∈ Lp (D), there is ψ ∈ Z d,p (D) such that
∇·ψ = f .
⊓
⊔
Remark B.75 (d = 2). In the two-dimensional setting, we only need the
spaces Z g,p (D) and Z d,p (D) defined as in (B.42a) and (B.42c), respectively.
Assuming D simply connected, the following sequence is exact:
i
∇⊥
∇·
o
R −→ Z g,p (D) −→ Z d,p (D) −→ Lp (D) −→ {0}.
(B.44)
In particular, for all g ∈ Z d,p (D), ∇·g = 0 iff g = ∇⊥ ψ for some ψ ∈ Z g,p (D).
Setting Z c,p (D) := R π2 Z d,p (D) = {g ∈ Lp (D) | ∇×g ∈ Lp (D)}, we obtain
the exact sequence
i
∇
∇×
o
R −→ Z g,p (D) −→ Z c,p (D) −→ Lp (D) −→ {0},
(B.45)
and the above statement is equivalent to the fact that for all g ∈ Z c,p (D),
∇×g = 0 iff g = ∇ψ for some ψ ∈ Z g,p (D).
⊓
⊔
B.7.3 de Rham complex with zero extension outside D
There is also a variant of the de Rham complex in spaces involving the zeroextension operator (a version with zero-trace spaces can be found in §B.9.3,
see (B.76)). Let us define the following spaces:
Zeg,p (D) := {f ∈ Lp (D) | ∇fe ∈ Lp (D)},
e c,p (D) := {g ∈ Lp (D) | ∇×e
Z
g ∈ Lp (D)},
e d,p (D) := {g ∈ Lp (D) | ∇·e
Z
g ∈ Lp (D)}.
(B.46a)
(B.46b)
(B.46c)
f
Lemma B.76 (Commuting zero-extension and derivative). ∇fe = ∇f
g,p
c,p
e
e
g
]
for all f ∈ Z (D), ∇×e
g = ∇×g for all g ∈ Z (D), and ∇·e
g = ∇·g for all
e d,p (D).
g∈Z
Part XII. Appendices
815
Proof. Let i ∈ {1: d}. It suffices to prove that if a function f ∈ Lp (D) is
e
g
such that ∂i fe ∈ Lp (Rd ), then ∂
i f = ∂i f . Adapting Exercise 4.2, we infer that
e
e
e
⊓
⊔
(∂i f )|D = ∂i (f|D ) = ∂i f and that (∂i f )|Rd \D = ∂i (fe|Rd \D ) = 0.
Theorem B.77 (de Rham complex). Assume that D is simply connected
and that ∂D is connected. The following sequence is exact:
i
∇
∇×
∇·
o
e c,p (D) −→ Z
e d,p (D) −→ Lp (D) −→ {0},
{0} −→ Zeg,p (D) −→ Z
0
R
p
p
where L0 (D) = {f ∈ L (D) | D f dx = 0}.
Proof. See ???
(B.47)
⊓
⊔
B.8 Smoothing by mollification
Smoothing by mollification (i.e., by convolution with a smooth kernel) is an
important tool for the analysis and approximation of PDEs. This tool has
been introduced by Leray [324, p. 206], Sobolev [427, p. 487], and Friedrichs
[236, p. 136–139]. The mollifying operation commutes with the differential operators from the de Rham complex (see §B.7) and converges optimally when
the function to be smoothed is defined over the entire space Rd . These properties are not so easy to achieve if the function is defined only on a Lipschitz
domain D, since convolution requires to extend the function outside D. The
difficulty induced by the presence of the boundary of D has been overcome
by Blouza and Le Dret [54] and Girault and Scott [246] by redefining mollification using a convolution-translation technique. However, the question of
devising mollifying operators compatible with the de Rham complex and that
of dealing with vectors fields where normal or tangent boundary conditions
are involved seem to have been addressed in the literature only recently. In
this section, we present compatible mollification operators with strong convergence properties over the entire domain; all the proofs can be found in Ern
and Guermond [217].
B.8.1 Mollification without extension
Let D be an open bounded Lipschitz set of Rd . The combination of Theorem 2.7 and Lemma 2.2 from Hofmann et al. [286] implies that D has continuous globally transversal vector fields, i.e., there exist a vector field J ∈ C 0 (∂D)
and a real number γ > 0 with the property that n(x)·J (x) ≥ γ at a.e. point x
on ∂D, where n is the unit normal vector pointing outward. Proposition 2.3
in [286] in turn implies the existence of a vector field j ∈ C ∞ (Rd ) that is
globally transversal and kj(x)kℓ2 = 1 for all x ∈ ∂D. For all δ ∈ [0, 1], we
define the mapping
ϕδ : Rd ∋ x 7→ x − δj(x) ∈ Rd .
(B.48)
♥♥I checked this
section, Aug 26 2015
816
Appendix B. Functional Analysis
Lemma B.78 (Properties of ϕδ ). The map ϕδ is of class C ∞ for all δ ∈
[0, 1], and for all ℓ ∈ N, there is c such that maxx∈D kDℓ ϕδ (x)−Dℓ xkℓ2 ≤ c δ,
for all δ ∈ [0, 1]. Moreover, there is r > 0 such that
ϕδ (D) + B(0, δr) ⊂ D,
∀δ ∈ [0, 1].
(B.49)
Proof. The smoothness properties are consequences of j being of class C ∞
and D being bounded, while (B.49) follows from Proposition 4.15 in [286],
together with the uniform cone property (see [286, pp. 599-600]).
⊓
⊔
Let us consider the following kernel:
(
1
, if kykℓ2 < 1,
η exp − 1−kyk
2
(B.50)
ρ(y) =
ℓ2
0,
if kykℓ2 ≥ 1,
R
R
where η is chosen so that Rd ρ(y) dy = B(0,1) ρ(y) dy = 1. To be generic,
we introduce q ∈ N, q ≥ 1, and consider the following operator acting on
functions in L1 (D; Rq ):
Z
(Kδx f )(x) :=
ρ(y)Axδ (x)f (ϕδ (x) + (δr)y) dy,
∀x ∈ D, (B.51)
B(0,1)
which is well-defined owing to (B.49). Here, Axδ : D → Rq×q is a smooth
d
field; the examples we have in mind are Agδ (x) = 1, Acδ (x) = JT
δ (x), Aδ (x) =
−1
i
det(Jδ (x))Jδ (x), and Aδ (x) = det(Jδ (x)) where Jδ is the Jacobian matrix
of ϕδ at x ∈ D.
Lemma B.79 (Smoothness). Kδx f is in C ∞ (D; Rq ) for all f ∈ L1 (D; Rq )
and all δ ∈ (0, 1], i.e., Kδx f ∈ C ∞ (D; Rq ) and Kδx f as well as all its derivatives
admit a continuous extension to D.
The above choices for the field Axδ , inspired by Schöberl [409, 411], lead to
the following important result.
Lemma B.80 (Commuting with differential operators). Recall the spaces
Z x,p (D) from (B.42) and the de Rham complex (B.43). The following holds:
(i) ∇Kδg f = Kδc ∇f , for all f ∈ Z g,p (D),
(ii) ∇×Kδc g = Kδd ∇×g, for all g ∈ Z c,p (D),
(iii) ∇·Kδd g = Kδi ∇·g, for all g ∈ Z d,p (D),
i.e., the following diagrams commute:
Z g,p (D)
∇✲
Z c,p (D)
∇×✲ d,p
Z (D)
∇· ✲
Kg
❄δ
C ∞ (D)
Kc
❄δ
∇✲ ∞
C (D)
Kd
❄δ
∇×✲ ∞
C (D)
Ki
❄δ
∇· ✲ ∞
C (D)
Z i,p (D)
Part XII. Appendices
817
We now show that the smoothing operator Kδx has interesting approximation properties. Owing to Lemma B.78, Jδ and J−1
δ converge uniformly to the
identity, and det(Jδ ) converges uniformly to 1. As a result, there is δ0 ∈ (0, 1]
−1
d
such that kJδ − Ikℓ2 ≤ 12 , kJ−1
δ kℓ2 ≤ 2, and | det(Jδ )| ≤ 2 , for all δ ∈ [0, δ0 ]
p
p
p
q
p
q
and all x ∈ D. Let L(L ; L ) := L(L (D; R ); L (D; R )) for all p ∈ [1, ∞].
Theorem B.81 (Boundedness, convergence). The sequence (Kδx )δ∈[0,δ0 ]
is uniformly bounded in L(Lp ; Lp ) for all p ∈ [1, ∞]. Moreover,
lim kKδx f − f kLp (D;Rq ) = 0,
δ→0
∀f ∈ Lp (D; Rq ),
∀p ∈ [1, ∞).
(B.52)
Corollary B.82 (Convergence of derivatives). Let p ∈ [1, ∞), then,
lim k∇(Kδg f − f )kLp (D) = 0,
∀f ∈ Z g,p (D),
(B.53a)
lim k∇×(Kδc g − g)kLp (D) = 0,
∀g ∈ Z c,p (D),
(B.53b)
lim k∇·(Kδd g − g)kLp (D) = 0,
∀g ∈ Z d,p (D).
(B.53c)
δ→0
δ→0
δ→0
Proof. Combine Lemma B.80 with Theorem B.81.
⊓
⊔
Remark B.83. The strong convergence stated in (B.53a) (which is valid in
open bounded Lipschitz sets) strengthens the original result by Friedrichs
(which is valid more generally in open sets) where strong convergence of
derivatives only occurs in compact subsets of D (see, e.g., [97, Thm. 9.2]). ⊓
⊔
Theorem B.84 (Convergence rate). There is c such that
kKδx f − f kLp (D;Rq ) ≤ c δ s |f |W s,p (D;Rq ) ,
(B.54)
for all f ∈ W s,p (D; Rq ), all δ ∈ [0, δ0 ], all s ∈ (0, 1], and all p ∈ [1, ∞) (and
s = 1 and p = ∞). Consequently,
k∇(Kδg f − f )kLp (D) ≤ c δ s |∇f |W s,p (D) ,
k∇×(Kδc g
k∇·(Kδd g
(B.55a)
s
(B.55b)
s
(B.55c)
− g)kLp (D) ≤ c δ |∇×g|W s,p (D) ,
− g)kLp (D) ≤ c δ |∇·g|W s,p (D) ,
for all f ∈ Lp (D) with ∇f ∈ W s,p (D) in (B.55a), all g ∈ Lp (D) with ∇×g ∈
W s,p (D) in (B.55b), and all g ∈ Lp (D) with ∇·g ∈ W s,p (D) in (B.55c).
B.8.2 Mollification with extension by zero
The function Kδx f defined in (B.51) does not satisfy any particular boundary
condition. For instance, even if f is zero on ∂D, (Kδx f )|∂D is not necessarily
zero. Since preserving boundary conditions is useful in some applications, we
now study mollifiers that have this property. Let C0∞ (D; Rq ) denote the space
of Rq -valued functions that are of class C ∞ and of compact support in D.
818
Appendix B. Functional Analysis
Let D be an open bounded Lipschitz set of Rd . Since D is bounded, there
are xD ∈ Rd and rD > 0 such that D ⊂ B(xD , rD ). Let O = B(xD , rD )\D.
The domain O is open, bounded, and Lipschitz; hence, we can apply the above
argument again, and deduce the existence of a vector field k ∈ C ∞ (Rd ) that
is globally transversal for O and kk(x)kℓ2 = 1 for all x ∈ ∂D. For all δ ∈ [0, 1],
we define the mapping:
ϑδ : Rd ∋ x 7−→ x + δk(x) ∈ Rd .
(B.56)
Lemma B.85 (Properties of ϑδ ). The map ϑδ is of class C ∞ for all δ ∈
[0, 1], and for all ℓ ∈ N, there is c such that maxx∈D kDℓ ϑδ (x)−Dℓ xkℓ2 ≤ c δ,
for all δ ∈ [0, 1]. Moreover, there is ζ > 0 such that
ϑδ (O) + B(0, 2δζ) ⊂ O,
∀δ ∈ (0, 1].
(B.57)
Proof. The only difference with Lemma B.78 is the proof of (B.57). Owing to
[286, Prop. 4.15] and the uniform cone property, there exists ζ > 0 such that
ϑδ (O) + B(0, 3δζ) ⊂ O for all δ ∈ [0, 1]. Let x ∈ O, then there exists zδ ∈ O
such that (1 + δLk )kzδ − xkℓ2 < δζ, where Lk is the Lipschitz constant of the
field k in O. Then, ϑδ (x)+B(0, 2δζ) = ϑδ (zδ )+(ϑδ (x)−ϑδ (zδ ))+B(0, 2δζ) ⊂
ϑδ (O) + B(0, δζ) + B(0, 2δζ) = ϑδ (O) + B(0, 3δζ) ⊂ O.
⊓
⊔
We consider the following operator acting on functions in L1 (D; Rq ):
Z
x
ρ(y)Bxδ (x)fe(ϑδ (x) + (δζ)y) dy,
∀x ∈ D, (B.58)
(Kδ,0
f )(x) :=
B(0,1)
where we recall that fe denotes the extension by zero of f outside D. Here,
Bxδ : D → Rq×q is a smooth field; the examples we have in mind are Bgδ (x) = 1,
−1
i
d
Bcδ (x) = KT
δ (x), Bδ (x) = det(Kδ (x))Kδ (x), and Bδ (x) = det(Kδ (x)) where
Kδ is the Jacobian matrix of ϑδ at x ∈ D.
x
Lemma B.8.1 (Smoothness and compact support). Kδ,0
f ∈ C0∞ (D; Rq )
1
q
for all f ∈ L (D; R ) and all δ ∈ (0, 1].
x
Proof. We just prove that the support of Kδ,0
f is compact in D. Recall that
Lk is the Lipschitz constant of the field k over D. Let ǫδ = δζ/(1 + δLk ). Let
x ∈ D be such that dist(x, ∂D) < ǫδ . Then, there exists a point z ∈ ∂D such
that dist(x, z) ≤ ǫδ . For all y ∈ B(0, 1), we infer that
ϑδ (x) + (δζ)y = ϑδ (z) + (δζ)y + (x − z + δ(k(x) − k(z))).
The second term on the right-hand side is in B(0, δζ), and the third one is
also in B(0, δζ) owing to the choice of ǫδ . Hence, ϑδ (x) + (δζ)y ∈ ϑδ (z) +
g
B(0, 2δζ) ⊂ O, owing to (B.57). This implies that (Kδ,0
f )(x) = 0.
⊓
⊔
Lemma B.86 (Commuting with differential operators). The following
holds:
Part XII. Appendices
819
g
c
(i) ∇Kδ,0
f = Kδ,0
∇f , for all f ∈ Zeg,p (D),
c
d
e c,p (D),
(ii) ∇×Kδ,0
g = Kδ,0
∇×g, for all g ∈ Z
e d,p (D),
(iii) ∇·Kd g = Kδ,0 π∇·g, for all g ∈ Z
δ,0
i.e., the following diagrams commute:
∇ ✲ e c,p
Z (D)
Zeg,p (D)
g
Kδ,0
❄
C0∞ (D)
∇×✲ e d,p
Z (D)
c
d
Kδ,0
Kδ,0
❄
❄
∇✲ ∞
∇×✲ ∞
C0 (D)
C0 (D)
∇· ✲ ei,p
Z (D)
i
Kδ,0
❄
∇· ✲ ∞
C0 (D)
x
We now show that the smoothing operator Kδ,0
has interesting approxiconverge uniformly
mation properties. Owing to Lemma B.85, Kδ and K−1
δ
to the identity and det(Kδ ) converges uniformly to 1. As a result, there is
−1
d
δ̃0 ∈ (0, 1] such that kKδ − Ikℓ2 ≤ 12 , kK−1
δ kℓ2 ≤ 2, and |det(Kδ )| ≤ 2 , for
all δ ∈ [0, δ̃0 ] and all x ∈ D.
Theorem B.87 (Convergence). The sequence (Kδ,0 )δ∈[0,δ̃0 ] is uniformly
bounded in L(Lp ; Lp ) for all p ∈ [1, ∞]. Moreover, for all p ∈ [1, ∞]
x
lim kKδ,0
f − f kLp (D;Rq ) = 0,
δ→0
∀f ∈ Lp (D; Rq ).
(B.59)
Consequently, the following holds for all p ∈ [1, ∞]:
g
lim k∇(Kδ,0
f − f )kLp (D) = 0,
δ→0
c
lim k∇×(Kδ,0
g − g)kLp (D) = 0,
δ→0
d
lim k∇·(Kδ,0
g − g)kLp (D) = 0,
δ→0
∀f ∈ Zeg,p (D),
e c,p (D),
∀g ∈ Z
e d,p (D).
∀g ∈ Z
(B.60a)
(B.60b)
(B.60c)
f s,p (D) from Definition B.60 equipped with the
Recall the Sobolev space W
norm kvkW
v kW s,p (Rd ) from Proposition B.61.
f s,p (D) = ke
Theorem B.88 (Convergence rate). There is c such that
x
kKδ,0
f − f kLp (D;Rq ) ≤ c δ s |f |W
f s,p (D;Rq ) ,
(B.61)
f s,p (D; Rq ), all δ ∈ [0, δ̃0 ], all s ∈ (0, 1], and all p ∈ [1, ∞) (and
for all f ∈ W
s = 1 and p = ∞).
Remark B.89 (Convergence rate on derivatives). Let p ∈ [1, ∞) and
s > 0. Assume first that sp < 1. Then, using Theorem B.63 combined with
Lemma B.86 and Theorem B.88, we infer that
g
k∇(Kδ,0
f − f )kLp (D) ≤ c δ s |∇f |W s,p (D) ,
c
k∇×(Kδ,0
g − g)kLp (D) ≤ c δ s |∇×g|W s,p (D) ,
d
k∇·(Kδ,0
g − g)kLp (D) ≤ c δ s |∇·g|W s,p (D) ,