Twenty -Seventh Hawaii International Conference on System Sciences Volume Ill: Information Systems:
advertisement
j-
If'J,/-17
...
Proceedings of the
Twenty -SeventhHawaii International
Conferenceon SystemSciences
Volume Ill:
Information Systems:
DecisionSupport and Knowledge-Based
Systems
Edited by Jay F. Nunamaker, Jr. and Ralph H. Sprague, Jr.
Sponsoredby:
The University of Hawaii
The University of Hawaii Collegeof BusinessAdministration
In cooperation with:
The IEEE ComputerSociety
Associationfor ComputingMachinery
.
~
IEEE Computer Society Press
Los Alamitos, California
Washington.
Brussels.
Tokyo
I
;~~wQt
~;;)\t..:~,;","~c't'7""",'
""',",c,;~""~,[;c:",j,,,,-
.
-
--'"
~;-
,~~~~'~"~;-."
.
.
~~
-
Towards a Unified AI Formalism
Deepak Kumar
Susan Haller
Dept. of M&thematia
Bryn Mawr College
Bryn Mawr, PA 19010
dkumarOcc.brynmaw:r
.edu
S~
Abstract
,
.
I'
,
,
commItment..
,
,
Semantlcallu,
Dept. or Computer Sd~~
South_tern Miaourl State University
Sprinlfield, MO 65804
Aa231fOcsm560.amau.edu
have come to be called BDI architectures [8]. M~t work
on BDI architectures hu as its underlying motivation the
need to exa.mine the feasibility of modeling practical rea..
..
8
BOnIngm resource bounded ~en t s [18, 6]. '"olo th at e,lc.-.
th
chit
tt
t t . teg t
'
ThaI
a unified approach to bul/d,
r paper p~lentl
.
h .t t
0
ch I .
Ing .lnte Igent arc I ec U~I.
ur approa ~ leI
,
"
on makIng ,ome lemanhc, ontologlro/, al well
a, arch,tectural
Syed S. All
Dept. or Computer SdSlce
University or New York at Bufralo
Buffalo, NY 1(260-2000
ballerOca.buffalo.edu
.~
ar
d
~.ures
a emp
bili.t .
_..6:-
0 m
ra e reasonIng, p Ian-
nIng, an
g capa
les. 0 ur wor k encompaasesth e
..
ell as BO
- .1dit lon
. a.! 188Ues
,
.
-..6. cal
pr-..l
reasonmg 188Uesu w
mvolved in NLU and KRR. Additionally, the architecture
bo t t d
.be ' d . ed usmg the prmap Ies
we
0 escn 18 . eBlgn
f are
b ' a -' u ted
S ch d .
0 0 J~.-vnen
programmmg.
u
a e81gn na t ur all y
ale
,
. ..
commIt our'el~e~ to pnnclplel gotlemlng the natu~ of the entitle, ~p~'ented bv the knowledge
,.
"
~p~lentahon forma/11m,
and the
~/atlonlhlpl
.
.'
.
exp Oloe
e
.
1-0 . ted d
ne oe 0 0 Jec Den
esJgn, nam ely,
I '.- all th be fi.- f b '
between the facultlel
of realonang, acting, and
.
,
natuml language under. tandIng.
Mo~ .pecifi-
..
exte ndibili.t y, and amenabili' ty t 0 concurrency. We will ret
t th
. I t
6:
F. t
will
t
um 0 ~ m a a er ~..on.
lIS we
pr~n
our
d I '
.t
'un er ymg comInl menoe.
callU, .we concentmte on the natu~ and ~p~1 ..
I.-I . ,I
t'
I
d
.entatlon 0 entitle" "" le,l, ac lonl, p anI, an
I
B
th
'
,
d
'
realonlng an acting ru e.. a.cu on ele pnnciplel we p~.ent the de.ign of an integruted AI
architectu~ that ha. a unified knowledge ~p~,entationalformali.m al well al a unified real onin~ and ac~ing componen~. The .de.ign o! th~ archatectu~ " ba,ed on ob]ect-o.nen,tedpnnclplel.
~e ol,O Ihov: th~t luch a de.'gn II ?mena~le to
Implement.atlon In ,a concurrent ob]ect-onented
programmIng pamdlgm. We .demonltmte the adtlantagel of our approach ullng letleral uamplel
from our alork.
-.1
8
Commitments
In this paper, we take a different approach towards the
integration process. We start with the premiae that re-
In the design of the OK architecture we have made severa.!
commitments. M~t of them dea.! with representationa.!
iBaues. The representation a.! formalism is designed to fa..
cilitate the representation of intenlionol concept. [22]. All
entities repr~nted in the KR formalism are intensiona.! in
that it will be possible to have two or more iDBtancesthat
denote u many entities and yet may correspond to exactly one extensional object (this is the .Principle of Fine<?rained Rep~t~tion~
[22]). Thus, the id.entity conditiona for two entItles will depend upon theu manner of
repre8et;ltation. Additi?nal1.Y' there is no req~ent
that
the e.nt~ty a£t~ally eXlBts m the. world (e.~, .umcon;s) .or
gardlessof the individua.! AI subfield involved, all intel-
t~at It
lectua.! activity involves representation of knowledge and
reasoning. Thus, all knowledge required to fulfill various
talks (NLU, planning and acting, reasoning, etc.) is to be
repr~nted in a common KR formalism. We also take a
unified view of reasoning and acting and incorporate that
into a BiDglea£ting and inference engine called a mtionol
engine. In what follows, we will identify the buic KR prin-
aple o~ ,Displacement [22]). In g~nera.!, we woul~ like
t~e entities repr~nted to be extenBlona.!A;8 well as mtenBlon&!. ~or. example, the. name of the entity may be one
way of linki;ng up an entIty to the exte~a.! world. .In ,the
OK Form~m" we ~
enforce the Umqu~ness Prmaple
of repr~nting mtenBlona.!concepts-th~re 18 ~ ~ne-to-o.ne
co~pondence between terInB re.pr~ntmg ~ntl,tles an.dm-
1
Introduction
18 ~ble
(e.g~,squarecircles) (this 18the P~-
ciples,the relationahipbetweenacting and inference,and
~ona.!
use that to present the design of a new unified AI formalism. called the Object:based (or OK) Archit.ecture.. The
deslgn of the OK ~chitecture employs an obJect-o~ented
meth~ology that 18 also amenable to concurrent ~plementatio~. We.aI.sopresent severa.!.examplesof the kinds
of. beh&~or ~blted
by computation a.! ~ents modeled
usmg this paradigm.
applied to all entities m the formalism,
In previous work we have argued for a unified view o~
acting and inference [13]. We have argued that inference
be treated u a kind of acting (menta.! acting). Reasoning
itself can be viewed &8 a sequenceof actionl performed in
applying inference rules to derive beliefs from other beliefs.
Thus, an inference rule can be treated as a rule speclfying an act-that of believing some previously non-believed
2
proposition (i.e., the believe act is implicitly included in
The OK BDI
Architecture
".
,I
concept;a
.[22J.The Umqu.eness
Prmaple will be
;
i
4
;
~
;
;
-
j
:.
i
the semantics of the proposition a.! connective). This leads
us to make two commitments in the OK architecture-that
there be a single operating module that is responsible for
reasoning and acting behavior; and that there be a proper
semantic distinction between entities that represent beliefs,
We begin by pointing out that we are interested in modeling computationa.! rationa.! agents. The behavior of th~
agents must be driven by their beliefs, desires, and intentiona. AI architectures that enable modeling of such ~ents
92
1060-3425/94$3.00 C)1994IEEE
Proceedingsof the Twenty-SeventhAnnual Hawaii
International Conferenceon System Sciences,1994
";
'(
.
~
;
;
---~-
- -
-~
~-,--~
.'"
-
acts rules for reasoning, a.nd rules for acting (pla.ns). The
first' a unified module for acting a.nd inference, is called a
roti~nal engine (as opposed to a.n inference engine). The
seCondleads to a.n ontological commitment on the part
of the KR formalism. In wha.t follows, we first describe
the OK Formalism, tha.t is a.nobject-oriented, int.enaional,
propositional knowledge representa.tion formalism. Then
we will present the design of the OK Rational Engine that
is responsible for implementing the unified view of acting
a.ndinference. Together, they constitute the OK BDI architecture (see [13] for a.detailed description).
4
The
allow a form of subsumption (a more general, or less restricted, v&ri&ble subsumes a.nother more restricted v&riable of the s&me sort) that corresponds directly to similar
naturalla.nguage reasoning based on description subsumption. We will illustrate the utility of structured varia.bles
with a naturalla.nguage processing example later.
4.4
As mentioned above, propositions are also treated as
conceptual entities.
Specific insta.nces of the clasa
Propoaition T.~
represent propositions.
Asserted
propositions form agent's beliefs. It is possible for the mod-
.
Formalism
OK
eled agent
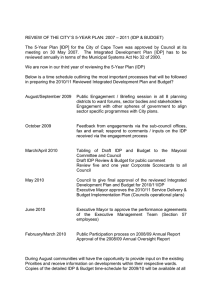
Th b . cl
hi
ch of the OK Formalism
is de icted
. e. a.sIC asa
erar
y
"
.
p. .
m Figure 1. A conceptual
entIty 18 a.nything
a. cognitive
,
..
.
agent ca.n think a.bout. In mtenslonal
representation
&1
for' bl
.
_1 ..
' cl d . di ' d _1ma.lisms, conceptu&A entitles m u e m Vl U&iB, V&rla es,
.
acts, a.nd beliefs.
Conceptual
.a.l1
.
.
En-tity
Te~ 18 the topmost
class m
All instances
of this class a.s well a.s
insta.ncesof it;a sub<:ia.88e8
ar~ .ten:ns of the O~ forma:!-
denote basic (un-n&med) entities, I1,
na.med individuals,
12.
4.2
...
denote
V2.
...
B1! Iaa(J., BLOCI)
... denote
propositions,
J.1,
,
where Iaa 18 a..subclass
~d BLOCI are mat.ances
variables.
.Te?
.
18 comp~
"
of ~tances
that
unique
represent n&med entitles m the doma.m ?f ~urse.
For
~xa.m,ple,a.term that denotes the n&med mdiVldual [JOBI]
18wntten as JOHI.
4.3
-:
l
,.
,
,
;
:
(HYP,{B1!},{})
of the class Pro~~ition
of the class Ind]'Yl.d~al
Te~, J.
Te~, B1
18the label of the lnsta.nce, a.nd the prOpO8ltlon a.sshown
is believed by the agent (denoted by writing the excl&m&otion following the label) as a.hypothesis (HYP).See [15, 13]
for more details. The syntax of writing propositions is not
IndiVlduals
Yidua;t
a.nd is defined
by the
"print-methods"
of the
Variables
4.5
Acta
An act is a.mental concept of something tha.t can be performed by va.rioua actors at va.rioua times. This is also
importa.nt for pla.n recognition (facilitating a pla.nsibleconclusion that an agent performing an act could be acting to
fulfill some plan). By the Uniquenesa Principle, a. single
act must be represented by a single object even if there
are several different objects representing beliefs tha.t several different agents performed tha.t act at different times.
Acts are represented by objects that are insta.ncesof the
subd&88esof the cla.saJ.ct T.~. Acts can be primitive
or complez (not shown in the figure). A primitive act ha.s
a.neffectory procedural component which is executed when
the act is performed. Complex acts have to be decomposed
into pla.ns.
Our present model of ~g.
is based upon & statOo
change model (see [14]). We Identify three types of state.-
93
-"
"'=c.:c.~.c"c"-"~-",,~,"W""
u-
soci&ted clasa. We are claiming that such object-centered
representations are inherently ca.nonical in tha.t they ca.n
be tr&nsl&ted into a.nother KR formalism simply by supplying a different print-method for ea.chclass. In fact, in
[13] we have shown that the OK Formalism is isomorphic
to a.sema.nticnetwork formalism, SNePS [22].
Insta.nces of the class Variable Te~ denote arbitrary
conceptual entities-individu.a.1s, belie~, ,ac~s,.etc. Va.riabIes are useful for representmg genenc mdiVlduals (e.g.,
'a. thing'); genera.! propositions (e.g., 'a t~g
that is a.
block'); generic propositions (e.g., 'something tha.t John
believes'); a.nd generic acts (e.g., 'pick up a thing'). ~e
have given special a.ttention to va.riablesthat represe~t mdefinite noun phrases a.nd a.nap~ora.tha.t models ,theIr use
in uatura.!language understanding. We have arnved a.t a.
non-a.tomic representa.tion of va.riables (also called '~",C.
!ured variablel) [3: 4, 5].. The struct.ure of the. va.nable
mcludes complex mtern&lized constra.m.u (that, mcludes,
but is not limited to, the type of the entity a va.na.blemay
be bou~d to) a.nd intem~ed
qu.antifier structures. The
sem,~tiC8 of str.ucture? v~ables 18 a.n au~ented (by the
addition of arbltra.ry mdiVlduals) semantic theory baaed
on [7, 22]. The use of such object-oriented va.ria.blesleads
to much simpler representations for tasu &8 diap&rate as
representing na.tural la.nguage sentences and operators in
a planning formalism. Additionally, structured va.ria,bles
""'
it
[15]. Also, it ena.blesthe agent to store results ?f its in-
I2,
denote
that
ferencesin order to mm future recallsmore effiCIent.For
ex&mple,a.ninstanceof a.nobject tha.t representsa proposition "A is a block" would be written a.s
. .
Named
The clasa Iudi
... denote
B1, B2,
acts, a.nd V1.
of propositions
or via derivation.
The instances
representing
propositions
also contain
information
typically
employed
by a truthmaintena.nce
system
(TMS).
In the OK architecture,
we
necessitate the presence of a. TMS because it facilitates
severa.! advantages
in the representation
of actions a.nd pla.ns
ISmthat denotemtenllona.!entitles m the domam of di&courseof the modeledagent. All instancesof this classare
uniquelyidentified by a.label which is denotedby a.nuppercaseletter followedby a.number. The letters help identify the kind of entity represented.For ex&mple,E1, E2,
".
representa.tions
.
Entities
The clasa Concep-tual
the OK Formalism.
to have
may not nec~y
believe. Since all instanc,es of the clasa
Conceptual
Ent 1 ty Te~
are also terms, this enables the
t t h
'-_I' fs bo t t
'--1:
agen
0 ave ~e
a. u IS own UC1lefs as w ell th Ole
f
h
Th
t
'
~'d
'"
0 ot ers.
e agen s lllll1
18 m odeled a.s a. se t 0 f
f th
'
E - -'- '- _I' f
. t
I.- " f
uc Ie "pace..
6'-'1l ~e
space COnllS s 0
e propO6ltions believed
by the agent either explicitly
(hypotheses)
_1
4.1
Propositions
~-~'""""C~~-'-..c
,~'"-~C~c._~,,",'""
-~,-~".~c~""~""c;"".-",,,,,,~-~"",.
.
.
,
Figure 1: The classhierarchyof the OK Formalism.
!~
'"
94
-
-
.
.
'"
",
,
external world states, mental states (belie{ space), and in-
c,:
..:f
..~:
;:
~
;':
4.6
tentional states (agent's current intentions). Accordingly,
we identify three classeso{ actions-phtt8ical actiom, mentallJction8, and control action., tha.t bring a.bout changes
in their respective sta.tes.
4.5.1
.;,':
In addition to standard beliefs that an agent is able to
represent, we also define a. special claaa o{ beliefs called
tramfonner8. A tramfonner is a. propositional representa.tion tha.t subsumes vanons notions o{ inference and acting. Being propositions, tra.nsformera can be asserted in
the agent's belief space; they a.realso beliefs. In general, a.
transformer is & pair ofentitie&--(a), (b», where both (a)
and (b) can specify beliefs or acta. Thns, when both parts
o{ & transformer specify beliefs, it represents a. reasoning
rule. When one o{ ita pa.rta specifies beliefs and the other
acts, it can represent either an act's preconditions, or its
effects, or a. reaction to some beliefs, and so on. Wha.t
& tra.nsformer represents is made explicit by specifying its
pa.rta. When believed, tra.nsformers can be used during the
acting/inference process, which is where they derive their
na.me: they tra.nsform acts or beliefs into other beliefs or
acts and vice versa. Trans{~~a.tions .can be, applied in
forward. and/or backW:&r:d
~~~ fa.shion. U~g a.tra.nsformer m forward chammg 18eqwvalent to the mterpreta.-tion "aiter the agent believes (or intends to perform) (a), it
believes (or intends to perform) (b).- The backwa.rdchAining interpretation o{ a.tra.nsformer is, "if the agent wants
to believe (or know if it believes) or perform (b), it must
first believe (or see if it believes) or per:rorm (a),- There
are some tra.nsformers tha.t can be used m forward as well
backward cha.ining, while others may be used ouly in
{ th
.3,- t '
.3- upon th e s}""-".c
---=~
one 0
ose uuec IOns. T 1.'W8 depenua
' ,
prOpo&1tlon
represented
by
the
tra.ns{ormer
and
whether
.
Physical Acta
Physical acts a.redomAin-specific acts that a.ff.ectthe outside world, For exa.mple, if the &gent has an arm and is
asked to pick up an object, the arm actua.lly moves to the
object, gras~ it, and then lifts it up. DepeDding on the
set o{ interfaces provided to the agent we need corespondmg a.ctua.torsto enable the carrying out the action in the
external world. This is done by specifying the effectory
component of the action by writing procedures tha.t access
the actua.tor interface. PICXUPis a. physical action in a.
blockswo~ld, For exa.mple, the, act, o{ picking u? a. ~lock
c;':
!':
,d:
J;;
na.med A 18represented as an object matance tha.t 18wntten
;'
as
.:
;'
~..
,"
Ai: PICXUP(A)
-
(~
4.5.2
f !
~ i
(
Mental
Acts
.
,as
Beliefs of the a.gent may change when actIOns are per-
ed
' r
.
' ed
We ha.ve BELIEVE
.orm
or an m.erence 18 CaIn
out,
d
DISBELIEVE
tal
t
'
h
b' t
1. an
a.s men
ac IOns w ose 0 Jec s are DeIi fs S
I - .3 din
d
'
, ,
fr
h
e,
imp y
g an remoVIng propO8ltlons
om t e
b .
,
beIi
.
elief-space
the danger
of
space m' t
t Tposea
1.:-'
, all
t lea.vmg
h the
all d e{
' ed b -': fs
conS18en.
W8 18 especl y rue w en
env
elle
I:
r
.,
"
'"
(~-
.
;:
;;c
,:
'li-ansformers
I
t has
'
h
3'
h
any mea.nlng w en woeu m t e
a.ve lOur types of tra.nsformers-t I.- I ' &
ac
,
a.realso added to the belief
space, The presenceof a.TMS
solves this problem, Typica.lly, TMSs provide explicit opera.tions for adding and deleting new beliefs to and from
a. belief space. These opera.tions, in a.ddition to the &8,
,
, ,
,
.
sertmg/deletmg
propOSltlons, '"perform con81Btency checks
In order to
belief space,
TMS h resultmg
4'
Th ' h guarantee a{ cons18tent
us, m t e presence0 a.
, t e elLectory components
,
,
,
o{ the two mental actIons should be lInplemented usmg the
,
..,
a.ppropna.te
opera.tlons,t ' This
th
t d dTMS
STRIPS
[8] stra.tegy implements
e ex en e
allump Ion,
-~
Control
. .
lUlL
--'-
0 enve new ellelB. For
r
exa.mpIe, a.cl&880f t ranslormers
th at represent ant ecedentt ul ' alled l_ tC t
.t
W e use th e
consequen r es 18c
A'-l
q ranslormers.
w
as
Ion
m.erence
t t'
no a Ion
Acts (Plans)
-
(b)
to write them. For exa.mple "All blocks are supports- is
represented as
Plans, in our ontology, are also conceptua.l entities. How-
B1!:Vx[I,a(x,BLOCI)
- Isa(x,SUPPORT)]
a.realso act&-albeit control acts. Control acts, when performed, change the &gent's intentions a.bout carrying out
acts, Our repertoire o{ control actions includes .equencing (for representing linear plans), conditional, iteratil1e,
diljunctive (equivalent to the OR-splits of the Procedura.l Net formalism [19, 23]), conjunctilJe (AND-splits), 8electil1e,and achiel1eacts (for goal-based plan invoca.tion).
These a.resummarized in Ta.ble 1, These control acts are
capa.ble
o{ representing
moat
o{ the systems
existing (and
pla.nmore).
structures found
in tra.ditiona.l
planning
In addition to the connective a.bove(which is also ca.lled
an or-entailment), our current vocabulary o{ connectives includes and-entailment, numerical-enta.ilment, andor, thresh, and non-derivable. Other quantifiers include
the existentia.l, and the numerical quantifiers (see [21]),
Given the object-oriented design of the architecture one
can define any additional cla.sseso{ connectives depending
on their own logical commitments,
We should empha.size,once agAin, tha.t since plans are also
conceptual entities (and represented in the aame formalism) they can be represented, reasoned a.bout, diacuaaed,
as well as followed by an &gent modeled in this architecture.
4.6.2
Belief-Act
Transformers
These are tra.ns{ormers where (a) is a let o{ belie{(s) and
(b) is a.let of acts. Used during backward cha.ining, these
can be propositions specifying preconditions o{ actions, i.e.
N
,.._~",.-,..'""'.~-c=;~-'"---~.
belIef-belIef,
4.6.1 Bellef-Bellef Transformers
Th
t d d
'
ul
( h
( ) '
ese are s an ar reasonIng r es were a 18 a. set
0{ an t ec eden t bell
,
a. set 0{ consequent be-': ef( s) and (b) 18
li e{( s)) Such r ules can be woeu3' m r10rwar,d b~wa.r, d as
ell
b .3'- ect' al ' r
t d '
b-': r-
ever,wewill not definea.separa.te
cl&88
{or themasthey
...
process,
we
belIef-act,
le/JI and act-ac t.
(a)
4.5.3
Chammg
.'
S.
.- 0{ beliefs or an -.mce both (a ) an d (b) can be se~
h
r
'
,
"
'
.
i~,c~
I.
-:~
ntro
-
-~,
'"
-
t OD
t
n
'",.
"',
;;;
"~
,,"
'~
SEQUElCE(a1'
a2)
DoOIE(a1,...,an)
~::
DoALL(a1'... ,an)
IF«P1,a1),...,(Pn,an»)
of
act
ITERATE«p1,a1)'.'" (Pn, an))
ACHIEVE
VITHSOKE(x,y,...)(p(x,y, ...),a(x,y,...))
VITHALL(x,y,...)(P(x,y,...),a(x,y,...»
Example: VITUU(x)(Helcl(x). PUT(x. TABLE»i. the act
of putting ODthe ~ble everything that is being held
Ta.ble 1: Summa.ry of control actions
(a) is a. precondition of some act (b). We will call it a
PreconditionAct tra.nsformer and write it &8 a predica.te
transformer is used during backwa.rd chaining to d~mpose the achieving of a goal (b) into a plan (a). For exa.mpIe, "A plan to achieve tha.t A is held is to pick it up" is
represented &8
PreconditionAct«(a),(b»)
For exa.mple,the sentence "Before picking up A it must be
clea.r" ma.y be represented &8
BS6!: PlanGoal(PICIUP(A),Held(A»
B26! : PreconditionAct(Clear(i),PICIUP(i»
Another backwa.rd chaining interpretation tha.t CAn be
derived from this tra.nsformer is, "if the &gent wants to
.
..
Used d.u:mg f°rw.a.r~ chalnlng, th;se tr.a.nsformerscan
be P~°Po.s1tlO~S
sP«;ci£ymgthe &gent s demr:s to reac.t to
certa.m SItuatIons, I.e. the agent, upon COmIngto believe
(a) will form an intention to perform (b). We will call these
VhenDotransformers a.nd denote them &8
know if it believes (b), it must perform
DoVhen(LOOUT(A),Color(A, ?color»
4.6.4
For exa.mple,a general desire like "Whenever something is
broken, fix it" ca.nbe represented &8
Transformers
5
-'Clear(i»
The OK Rational
Engine
The OK R.a.tional Engine is u interpreter tha.t opera.tes
on specific instuces of objects representing beliefs, tra.nsformers a.nd acts. In other words, it is the operational
It ca.nalso be used in backwa.rd chaining during the plu
generation process (cl&88ical pla.nning). The PlanGoal
96
-
Transformers
piling 18a complex act and the plan tha.t decomposesIt 18
expressedin the proposition
I.
B71. . PlanJ.ct(S~CE(Ptrr(B,
TABLE),Ptrr(A,B»,
PILE(A,B»
These a.rethe propositions specifying effects of actions &8
well as those specifying plus for achieving goals. They will
be denoted ictEttect
ud PluGoal tra.nsformers respec~
tivdy. The ActEttect tra.nsformer will be used in forwa.rd
cha.ining to accomplish believing the effects of act (a). For
example, the sentence, . After picking up A it is no longer
clea.r~is represented &8
B30! : ictEttect(PICIUP(i),
Act-Act
These a.repropositions specifying plan decompositions for
complex actions (called PlanAct tra.nsformers), where (b)
is a complex act and (a) is a pla.n that decomposesit into
simpler acts. For example, in the sentence, "To pile A on
B first .involves
put B on
the table
and ofthen
A ononB"a (where
p~
creating
a. pile
twoput
blocks
ta.~le),
B100! : Vx[VhenDo(Broken(x),FIl(x)]
Act-Belief
(a),. which is rep-
resented as a.DoVhentransformer. For exa.mple, "Look at
A to find out its color" ca.n be represented &8
VhenDo«(a),(b»
4.6.3
:"
/
;
""
,
'
;
C',c
. -
.--
-
.
,-
"7.
--
,
Ii'
11.
'"
t'.'
c
~
!,
~
~
~
f.
component
of the a.rchitecture
tha.t is responsible
for pro-
6
ducing
the modeled
a.gent's
reasoning
a.nd ading
behavior.
It is specified
by three
types
of methods
(or messa.ges)-
In
~
~,
f
.
B
~
,.
e Ie tie
ser
~
- A me thod th a. t
n.on al or querymg .
a.re two
be
lied
ca.n
app
t
r- fi
0
Co
purposes.
version.--
beli
ela
or
tl
a&-
th
nsequen
y
where
~
the
l
agent's
I.
[
process
p is a belief,
of
belief
that
~
can
be
the
It
derived
method
belief,
returns
via
denotes
p,
all
forwa.rd
in
central
idea
I
d
the
where
p is a belief,
cess of querying
returns
;
believed
all
the
the
by
or via. backwa.rd
~
Intend-
tha.t
ta.k~
denotes
act, a.
the
an
ad
Nelson
a.gent
either
chaining
inference/ading.
a.rgument
agent's
It
These
when
backward
ue two
methods
a.pplied
explicitly
enable
various
tra.nsforma.-
Send
to
first
tw:o
of
belief
8ltiO:nal
attitudes
.Belle~e
and
Intend
mg
With
the
a.gent.
can
be ~ded
a.nd
quenes
interpretations
a.nd Tran..form!,
These
tra.ns!ormers
for
through
plish.ed'
[13]
ods:
We
there
re-
Va.nOU8
Thus,.
can
have
slots
a.s the
gether
they
BELIEVE
sion
form
a.nd
its
facility
for
All
simplifies
the
cific
for
cific
these
a(;ts
the
theory
iza.tions
of
a.nd control
to
gene:al
The
systems
the
found
action
The
agent's
can
acts)
tha.t
be specified
will
of intentionality
the Intend
method
acts (to implement
inherit
its
plan
(and
Thns,
the
intentions
employed),
sup--
don't,
Actor
view
the
(to-
in
for
revi-
rational
A~tor
to explore
implem~nted
a.rchitecture
of computation.
help
cap~ure
a.rchit~t:ure.
m
It
the
18 our
this
m the
future.
the
ru.dimentary
a conventional,
environ-
out
a.s some
a.re simila.r
(or
Tra.nsformers
overall
hope
In
The
of consid-
a.s well
lat~er
AI
because
a.nd
representational
Vlew
sya[12].
la.nguages.
arises
the
Actor
to implement
Actor
engine
Only
Building
is probably
primitives
nsing
uchitec-
PLANNER
ma.de
is
inher-
of Actor-based
for
on
This
a.dequate
some
formali.&m
the
been
softwa.re
OK
making
to the
of
have.
ha.ve
commitmen~.
be able
represent
a.-
is used
performing
to
the
embedded
tha.t
we .would
meanwhile,
.components
we
of the. OK
qu&8l-Concurrent
paradigm.
standud
(i.e.
in
spe-
this
building
agents
method
the
Examples
We started
specialized)
domain
where
7
ing,
paper
integr&ted
&Ie capable
acting,
by indic.ating
rational
that
cognitive
of naturalla.nguage
reacting,
and
we were
interested
agenu.
These
interaction,
knowledge
acquisition
reasonbehavior.
spe-
&8 special-
"T.1
For
acta).
pable
t
of the
work
ob-
systems.
OK
systems.
goal
of
by
the
motivations
Hewitt's
ha.ve
mes-
difference
in Actor
that
Actor
original
Labels
determined
is missing
langu&ges.
la.rge
the
PICIUP(J.)
of concur-
only
a long-term
attempts
Actor
build
OK
nature
no
actors.
The
to indicate
Ca.rl
sending
be the
ad
Actor
model
is
using
the
of
&8 yet,
to
object
[1, 2]. Like
Actor
systems,
a.s a. ba.sis of computa.tion.
that
seems
fact,
out
using
ments
of
can be defined
for mental
the sema.ntia
of respective
,.
i
the
example,
a.n integrated
Intend
method
intentions
by
&8 inherited.
accomplish
a.s belief
a.nd
directly
message,
For
.
the
objecta
h&8 been
da.te,
conform)
methods
the
be 'implemented
In
this
we
is a
procedures
such
engine
specific
obfrom
object
a.nd
something
behavioral
that
of
this
came
To
a.nd DISBELIEVE
effectory
their
behavior
can
18 accom-
The
Believe
by
PICXUP(J.»
receiver
a.rchitectures
the
me.th-
the
example
above
could
is very
similar
to the
methods,
tema
a.gent
to
individual
systems.
capabilities
support.
the
out
message
addre88e8.
AI
illustrating
object
ratio-
to and
identified.
mail
ture
the
a.nswer
below
specific
by
several
&8 well
(physical
agent
with
of
the
Nevertheless
b.ackcha.m-
to
explicitly
in
OK
carried
rational
each
denote
ited
usmg
of all. the
a.re implemented
methods
hiera.rchy
Belle.tle!
..
instanc~
er&tions
BELIEVE
have
tions
(see [15] for details).
specify
the fulfillment
of
ads.
order
underlying
TMS).
DISBELIEVE
We
w:orld
the
provides
Each
actions
the
usmg
m
be
object-
concurrent
messag~
of the
computation
is employed
the
how
will
rent object-based
message
passing
that
ex~ernal
~o result
inherently
maintained
mental
procedures.
TMS
for
and
the
This
denote
transform~rs
ac~ ~
m
Object
conjun.ction
exa.mples
maintenance.
as well
B14318
jects
architecture.
also
is updated
propo-
semantics
descnptions
sever.&!
of the
consistency
J.n-tCq
a query
Believe?
~ethods
2 ~hows
Kevery
be
of the
receiVing
PreconditionJ.c-t(?x.
mteract-
Notice
to d? some
uchitecture
belief
and
deta.i1ed
present
in
the
Figure
for
~onta.ms
features
The
port
D°:w'hen
the
a.re generated
~sed
. Vla
method.
p~ble
will
~hen
progr~mm;ng.
that
should
For
ue
message
The
by
concurrent
inference
messages.
self-contained
..
implementation
a.nd
a.s the
a user
the
s beliefs
.abo:e.
a.n wtent:on
query.
about
cha.mmg
Believe.
.the
It.18
formmg
for
the
by
s ~ef.space
a.gent
defined
.a.igonthm
in~
agent
to
mtention.
?eli~
methods~
lea.d
to
be. mvoked
New
to th.e
~rres~nd
~d
can
rega.rding
tra.nsformers
also
&Ie
proclaim
la.ngua.ge
viewed
B143:
.
Believe?
receiver
and
for
&8 to
methods
sender
sage
itself.
the
The
to
that
objecta
comm~mC&ti°.n
pro. tocol .
orderly
mteradions,
which
facilitate
a.nd
The
is that
Believe?(PreconditionAct(?x,PICIUP(J.»)
.
that.
_:1
a con-
the
spectively
~~tice
entin~
.pth Y8lC
a ~~orm
sending
correspond
and
Corresponding
a.nd forwa.rd
cha.ining
vemonsTran.sform?
system
al
to
a.rchitecture.
the invoca.tion
to perform
to tra.nsformers.
ading
instances
each other.
&Ie
..
.
a concurrent
engine,
ject
object-oriented
so far
In
(Intend(o»
intention
goes
nature.-
pro-
BDI
ground
infer-
p a.nd
modeled
[17]
relating
OK
a perfect
progra.mming
of p.
with
~
issues
the
h
or
oriented
the
Ita-ins
unify
be
ca.n be
Tran.sformtions
tha.t
&8 its
modeled
denotes
usertional
beliefs
the
it
.ded
present
of
a.ny
.__1
0g1(;&1
beliefs
chaining
~
two properties
to
nal
Belietle(p)?-
in
a.re proVl
tend
the
we
Implementation
a.n
ence/acting.
.
~
l",..
the
aBserting
space.
~
,:
~ion,
These
Belietle(p)!-
~-
,
this
Concurrency
current
represent
ere
~
~
Towards
The
instance,
of
Blowworld
in
the
understanding
Domain
blocksworld
the
domain,
following
the
a.gent
ia ca.-
paragraph:
.
--~
.
97.
'"
"i"
Method
'
BELIEVE.'(fI : Propo.ition Tenn; a- : Sub.titution := NIL)
i.
let 0
-
fla-
iJ ASSERTEDf(o) then
return the .et {oJ
eL.eiJPATTERNf(o) then
",
.
..
;~
RESULT - a .et containingall a..erted in.tance. oj 0
;;
endiJ
find the .et T oj applicableAntCq tranlJonnerl, i.e.
let T - {t I fll ~ NIL 1\ BELIE VE.'(t) , wheret/11- UNIFY(CQ(t),o)}
al.o find all the applicableDoWhentranlJonnerl, i.e.,
let T - T u {t I t/11
~ NIL 1\ BELIEVE.'(t),wheret/11
- UNIFY(WHEN(t),o)}
-
Jor each t E T: loop
RESULT
RESULT u TRANSFORMf(t,t/1cJ
endloop
find the let oj matching propo.itionl, i.e.,
letB - {bI
t/1b
~
NIL,
1Dhere t/1b -UNIFY(b,o)}
"
Jor each b E Bloop'
RESULT+- RESULT U BELIEVEf(b, t/1b)
endloop
return RESULT
end BELIEVEf
Figure 2: The Believe? Method. See [13] for details of other methods.
There is a.ta.ble. The ta.ble is a.support. BlockB
a.re supports. A is a. block. B is a block. C is
a. block. C is clea.r a.nd on the ta.ble. A is clea.r
a.nd on the ta.ble. B is clea.r a.ndon the table.
..
.
.. .
.
.,
PIcking up 18 a pnInltlve actIon. Putting 18 a.
primitive action. Before picking up a. block the
block must be clea.r. If a block is on a support
then after picking up the block the block is not
on the support. If a block is on a support then
after picking up a block the support is clea.r. After picking up a. block the block is held. Before
putting a.block on a support the block must be
held. Before putting & block on a support the
Notice tha.t the sentence describes a varla.ble tha.t is a
block a.nd it is clea.r. The request is represented using
the VITHSOME
act as
VITHSOKE(x)((Isa(x,BLOCK)1\ Clear(x»,
PICIUP(x»)
Structured varla.blesca.n also be used to represent luch actioDS. The agent in ca.rrying out the intention of picking
up a. clea.r block determines all the blockB tha.t a.re clea.r
a.nd picks up one of them. In a situation where, say, the
blockB A, B, C a.reclea.r, the agent will respond
The designator Is8.(x, BLOCK)1\ Clear(x)
is effective
on the following
Isa(A,BLOCK)1\ Clear(1)
Isa(B, BLOCK)1\ Clear(B)
Isa(C, BLOCK)1\ Clear(C)
for the act
VITHSOKE(x)«(Isa(x,BLOCK)1\ Clear(x),
PICIUP(x))
support must be clea.r. After putting a. block
on a.support the block is clea.r. After putting &
block on & support the block is on the support.
After putting a block on a.nother block the la.tter
block is not clea.r.
A pla.n to achieve that a block is held is to pick
up the block. A pla.n to achieve tha.t a. block is
on a.support is to put the block on the support.
If a block is on a support then a.pla.n to achieve
I intend to do
DoolE(PICKUP(1), PICIUP(B), PICIUP(C))
that the support is clea.r is to pick up the block
a.nd then put the block on the ta.ble.
PICKUP (C)
Chose to do the act
i'
'¥
:;
low doing:
BELIEVE(Beld(C»
PICIUP(C)
The
agent
pa.rsesto
therepresent
a.bove sentences
uses perform
the formalism
described
them. It a.nd
can then
actions in the blocksworld using the information provided'
DISBELIEVE(Clear(C»
DISBELIEVE(On(C TABLE»
in these sentences. It is also capable of carrying out reo
quests like
Next, let us &88umethat in addition to the knowledge described in the pa.ragraphs above, the agent also believes
Pick up a clear block.
1.
l'
,~
::
: .
"
98
111 red colored blocks are wooden.
~
_0.
... .
.,
2.
Look is a priaitiTe
action.
3. It you want to know the color
t .t
a J. .
to go to the Eastern Hills
you should take Maple.
M~l?
Why1
taking Maple avoids heavy tratfic.
Why?
since taking Kaple there are tewer
businesses than taking Sheridan
..,.'
By modeling the discourse WIth liB evolvmg iext plAn, IDP
can produce concise text iha.t does not repeat old information along with the new. These types of interactions
At this point, the agent knows thai J. is a. block but has
no beliefs a.bout ita colors. The query will backcha.in as
follows:
I wonder if Isa(A, WOODD)
a.r.ecoherent a.ndcoliabora.iivebecauseeach participa.ni
I wonder if Isa(J., BLOCI)
I know Isa(A, BLOCI)
I wonder it Color(A, RED)
knows how his contribution fits in. Levelt refers to this diacourse property as ducour8e deizir [16]. Consistent with
the Gricea.n Ma.xims [9], IDP proceB&esfeedback with the
idea that the more the user says, the more he feels he needs
to say for the system to identify the text pla.n expansion
that is sought. Therefore, IDP uses a.ny additional information that the user provides to try to recognize & text
plan. This can lead to text plan expansions th&t &Ie not
immediate continuations of what the system s&id last. The
following exa.mpledemonstra.tes this type of processing:
User: Should I take Maple or Sheridan
The query has backcha.ined through (1) above. next it
backchaoins
through (3), First, it derives the specific tra.neformer
DoWhen(LOOUT(A), Color(J., ?color»
which is then applied and the act LOOUT(A) is performed.
As a.result (a.ssumingthat A is colored red), the belief
Color(!,
RED)
to go to the Eastern Hills Mall?
take Maple.
Why not go on Sheridan?
you could take Sherida.n however,
taking Maple avoids heavy trattic.
In this interaction the user's feedback indicates th&t he
would like the sy;tem's response to include information
about the feasibility of an alternative route. IDP uses the
mentioned act, go-ing on Sheridan, to identify a.discourse
entity a.nd a text plan expansion that uses it. This is how
IDP continues to pursue its own intentions while providing
the implicitly requested information. IDP can also detect
IDP:
User:
IDP:
is added to the agent's belief space which completes the
earlier chaoinof inference and returns the &Il8wer (that A
is wooden). Thus we see thai it is also possible for inference to lead to actions. Similarly, one can forward chain
t?rough WhenDotransformers in, order to re~ to sit~&tIO~S. The above e,xa.mplehas illustr&ted ~ mterestmg
ar~ifact of o~r a.r~tectur.e--th&t an agent 18,ca.pa.ble.of
usm~ actmg ~ semce of mference .as well as ~ference ~
serVIceof ~tmg (~nly the latter bemg the typiCal case m
most plannmg/actmg systems).
7.2
Planning
Discourse
to Discuss
user-imposed digressions:
User: Should I take Maple or Sheridan
to go to the Eaatern Hills K~l?
IDP:
take Maple.
User: Why should I take Maple?
IDP:
taking Maple avoids heavy trattic.
User: Why?
IDp.
taking Maple
there
are fewer
businesses
than
taking
Sheridan.
Plans
, .
We ~e
modelin~ a.nagen~that,is capa~le of descnbmg
and Justif~g domaIn pl&Il8 m an In;terac.tlvenatural language settmg [10, 11]. The Interactive Discourse Pla.nner
(IDP) relates two areas of resea.rch. The first a.rea, plan
recognition,
focuses
on analyzing
naturalla.nguage
that is
about plans to
recognize
the speaker'~
intent a.nd p~ovi~e
~
;
helpful respo.nses.!he second a.rea,di,scoursepla.nnmg~18
concerned
WIth u8,ng
pla.ns for selectmg
a.nd opera~es
strudurmgin
text that ac,hieves
co~muni.ca.tive
goals. I~P
"
speaker and the user is the primary liatener. IDP is respon-
.
User:
IDp. .
a. collaborative mode m which the system 18 the pnmary
"
:
IDP:
IDP:
User:
IDP:
Is A wooden?
;
Should I take Maple or Sheridan
.. User:
If the a.gentis then asked the query:
,
U~:
ot a block look
Whyia there heavy trattic
now? *
since
now
is
rush
hour
aa I was saying, tak~ Maple
aToids. heavy tratfic.
,.'
sible for pla.nning text to describe and/or justify a.doma.in
pla.n, a.nd the user is responsible for providing feedback
tha.t lets IDP know how to continue the discussion in a.
way tha.t is helpful.
,
.
.
.
The ~r s third question (marked WIth a.nastens,k, ) relies
on a.n mferenc~ t~at he made from the propOSltl~n that
IDP conveyed m liB second response. IDP uses Its text
pla.n to detect that this question, unlike the user's first
two questiona, initiates a digression. The system makes
this determination when it cannot find a wa.yof expa.nding
the focussed portion of ita ten pla.n to &Il8wer it. When
IDP detects a user-imposed digreaaion,it &Il8wersthe que&tion, and then it immediat.e1ygoes back to pursuing to ita
own intention by expanding is texi plan further. In these
examples thai intention is to have the user adopt the plan
of iaking the Maple Road route. As demonstrated by the
lui two lines of IDP's final response, the uniform repre-
IDP exploits the OK formalism by using a uniform representation for the text plan that it formnlates a.nd executes incrementally, and the doma.in pl&Il8 thai are under
discuaaion. In this way, the text plan a.ndthe doma.in plans
a.reboth accessiblefor analyzing the user's feedback. IDP
can interpret vaguely articulated feedback, generate concise replies a.nd metacommeniB, and detect user feedback
that initiates a. digresaion. AB a tesibed for our model,
IDP diacuaseadriving routes u the domain plans.
.
l
I
99
I
-
.~-~-~"
~~
~ntation that is used for all information allows IDP to u.e
Its own text plan .. content to do this.
7.3
Structured
Variables
Our system is capable of natural language processing uain~
structured variables. It includes a generalized augmented'"
transition network (GATN) natural language parser and
generation component linke'd up to the knowledge base
(bued on [20]). A GATN grammar specifies the tra.nalation/generation of sentences involving complex noun
phrases into/from structured varil.ble representl.tions
.
An advantage of the use of structured variables lies in
the representation and generation of complex no~n phr~
that involve restrictive relative clause complements. Tke
~estriction set of a structured variable typically consists of
a. type constraint along with property constraints (adjectlves) and other more complex constraints (restrictive rei&tive clause complements). So, when parsing I. noun phrase,
all processing is localized and &88Ociatedwith building
its structured variable representation. When generating a
surface noun phrase corresponding to the structured variable, all constraints &88Oclatedwith the variable are part
of its structure and can be collected and processed euily. T.his is in contrast to non-structured variable repr~
sentatlons (such as FOPL) where the restrictions on variabies are dis&880cia.tedfrom the variables themselves in
the antecedents of rules. The interaction below shows .:entences with progressively more complex noun phrases being used. These noun phr&lel are uniformly represented
using structured variables. Parsing and generation of these
noun phr&lel is simplified beca.usestructured variables collect all relevant restrictions on a variable into one unit a
structured variable (user input is shown italicized).'
: Every man own. a car
I understand that every aan ovna soae car.
: Every ~oung man own, a car
I understand that every young aan ovna soae car.
: Every voung man that love. a girl own, a car that i.
.port~
I understand that every young aan that loves any
girl ovna S08e sporty car.
: Every ~oung man that love. a girl that own. a dog own.
a red car that i. .port~
I understand that every young aan that loves any
: Every ~oung man that love. a girl and that i. happ~
girl
that
ovna
any
dog
ovna
soae
red
sporty
..
..
rated from the variables in the antecedents of rules involving these variables. This is not the case in a structured
variable representation.
D__.
~use
the structure of representatwns of rules using
s~ructured variables is '"fiat", that is, there is not the arlmClal antec:edent-consequentst~ctur.e ~at,ed
with firstorder.loglc-based representatIons, It 11 ~ble
to frame
questIons whose a.nswersare rules and not Jnst ground formul... ~ause of the subsumption relation ?etween structured vanables (a more gener~, or lell.restncted, ~able
subsumes another more restncted vanable) , u.eful mferences are possible, directly. Since the structure of the
question will mirror the structure of the rule any rule thl.t
is subsumed by I. question is an answer to ihat question.
What follows is a sample dialog involving questions whose
a.nswersare ground propositions (e. g., I. John mortal) as
well .. questions whose answers a.re rules (e. g., Who i.
mortal):
.
: Every man ,. mortal
I unders:and that every aan is aortal.
: Who ,. mortal
Every aan ~s aortal.
: I. anfJ nch man mortal
Tes, eve~ rich aan is aortal.
: John ,. a man
I understand that John is a aan.
: I. John mortal
Yes, Jo~ is aortal.
: Who ,. mortal
John is aortal and every rich aan is aortal and
every aan is aortal.
: Are all rich voung men that own .ome car mortal
Yes, every young rich aan that owns soae car is
aortal.
: AnfJ rich ~oung man that own. an~ car i. happ~
I understand that every young rich aan that ovna
any car ia happy.
: I. John happ~
I don't knov.
: Young rich John own. a car
I understand that aortal rich young John ovna
soae car.
: Who OtDn.a car
Mortal rich young John ovna soae car.
: I. John happ~
car.
Tes,
own. a red .port~ car that wa.te. gcu
I understand that every young happy aan that
loves any girl owns soae
sporty red car that v_tea g_.
.
aortal
rich
young
John
is
happy.
This dialog also illnstra.tes the uses of subsumption. Since
we told the system Every man i. mortal, it follows that
any more specifically constrained man (e. g., Every rich
lIoung man that Oum6.ome car) must alao be mortal. Note
that this a.nswer (a rule) follows directly by subsumption
from a rule previously told to the system. This is another way in which rules may be answers to questions, in
a representation using structured variables. The utility of
structured variables is a pressing argument for the use of
object-oriented design a.t all levels of an AI formalism.
The parser parses the user's sentence and builds a representa.tion of the user input. The resulting representation is
then passed to the generation component, which generates
the output response (sometimes prefixed by the canned
phrase
I underatand
that). Hnoun
constraints
varia.bles
corresponding
to the complex
phraseson
were
repre-
sentedusing first-order logic-basedrepresentations,then
8
Remarks
it would be difficult to generate natural language noun
phr&lel con:esponding .to these va.ria.b~es.This is beca.use
We ha.vepresented a unified formalism for modeling com-
the constramts on vana.bles would, likely, be well sepa.-
puta.tional rational agents. In doing so, we have made
":
co
;\
j
:
:}
!
;;
'
;
;
'.
100
~~
-",
-
.-
.
f
,
I
!
f
;
some ontological &8 well &8 semantic commitments. The
object-oriented design of the forma.liam ena.bles a canonica.l representa.tion of entities. The architecture h&8 been
specifically designed to be extendable-in its ontology, &8
well &8 the underlying logic and action theory. This is a
direct benefit from the object-oriented design. One can
easily extend the forma.liam by defining additional classes
!.
and/or subcluaes. The ra.tional enginecan be modified
enceon Arlificialintelligence, Melboume,Austra.lia.,
by changing (or specia.lizing) ita methods. We ha.ve also
November 1993. to a.ppea.r.
f
f
~
I
brieily addressedthe pO88ibilityof implementinga concur-
rent ra.tional engine. Finally, we presented several exa,mpIes from our work illustra.ting
can be modeled.
va.rious AI faculties
that
Acknowledgement
~
~
tI~
All the work discussed in this pa.per W&8carried under
the direction of Dr. Stua.rt C. Sha.piro.Our representa..
tiona.l commitments are a direct result of over two deca.des
of work of Dr. Sha.piro and his associates on the SNePS
semantic network processing system.
[10] S. M. Haller. Interactive genera.tion of plan justifica..
Uona. In Proceeding. of the Fourth European Work.hop on Naturol Language Generation, pages 79-90,
1993.
[11] S. M. Haller. An interactive model for plan explana..
tion. In Proceeding.. 01 the Au.rtralian Joint Con/er-
.
.
.
[12] C. HeWItt. Procedu.ral embedding of knowledge m
planner.
1971.
In Proceedlng.r 2nd IJCAi,
pages 167-182,
[13] Deepa.kKuma.r. From Belieft and Goal.t to intention.
and Action.s- An Amalgamated Model of Acting and
Infe~nce. PhD thesis, Sta.te University of New York
a.t Buffalo, 1993.
[14] Deepa.k Kuma.r and Stua.rt C. Sha.piro. Architecture
of an intelligent agent in SNePS. SIGART Bulletin,
2(4):89-92, August 1991.
[15] Deepa.k
Kuma.randStua.rtC. Shapiro.Deductive
ef-
~
j
i
References
-
[1] Gul Agh&. Concunen t Ob.ect
Onen
. ted ProgramJ
ming. Communication.. 01 A aM, 33(9):125-141, 1990.
t
[
r
t
[2] ming
Gul Agha
Carl InHewitt.
ProgramUsingand
Actors.
Amori Concurrent
Yonezawa a.nd
Mario
Tokoro,
editors,
Object-Oriented
Concun-ent
Pro-
gromming, pages 37-53. MIT Press, Cambridge, MA,
1987.
[3] Syed S. All. A "Natural Logic. for Natural Language
Proce..ing and Knowledge Rep~.entation. PhD thesis, State University of New York at Buffalo, Computer Science, 1993. Forthcoming.
[16] W. J. M. Levelt. Speaking: From intention to Articulation. MIT Press" Cambridge 1989.
[17] Micha.el L. Nelson.
Concurrency
&; Object-Oriented
Programming. ACM SIGPLAN Notice., 26(10):6372, October 1991.
[4] Syed S. All. A Structured Representation for Noun
Phrasesand Anaphora.. In Proceeding. of the Fifteenth
Annual Confe~nce of the Cognititle Science Society,
pages 197-202, Hillsdale, NJ, June 1993. La.wrence
[18] Anand S. Rao and Micha.el P. Georgeff. An Abstract
Architecture for Rationa.l Agents. In Bemha.rd Nebel,
Cha.rlesilich, a.ndWilliam Swartout, editors, Proceeding. of the 2nd Confe~nce on Principle. of Knowledge Rep~.entation and Rea.oning, pages 439-449,
San Mateo, CA, 1992. Morgan Kaufmann Publishers.
.
[19] ~a.rl D. S~erdotl. A Structu~ fo,. Plan. and Behaulor. ElBeVlerNorth Holland, New York, NY, 1977.
Erlba.um.
[5] Syed S. All and Stua.rt C. Sha.piro. Natural La.nguage
Processing Using a Propositional Semantic Network
with Structured Variables. Mindl and Machine., 3(4),
[20] S. C. Shapiro. Genera.li.zedaugmel1~edtranaition network grammars ~or generation from sem~tic n~two~kB;'The Amencan Journal of Computational Llnguutlc., 8(1):12-25, 1982.
Nove~ber 1993. Special Issue on Kno,,:ledge Representatlon for Natural Language Proce881Dg.
[6] Micha.el E. Bratma.n, David J. Isra.el, and Ma.rtha E.
[21] S. C. Shapiro and The SNePS Implementation Group.
SNePS-2 u.~,.'. Manual Depa.rtment of Computer
Science, SUNY a.t Buffa.lo, 1989.
Po~a.ck.Plans a.n~ Resource-~ounded Practical Rea..
sonmg. ComputatIonal IntellIgence, 4(4), 1988.
[7] Kit Fine. Realoning with Arbitrory
Blackwell, Oxford, 1985.
;
,
ficiency, belief revision and acting. Journal of Ezperimental
Artificial
Intelligence (JE( ) and Theo~tical
F
.
"'A i)
,5 2 ,1993. orthcommg.
Object.. Basil
[8] Micha.el P. Georgeff. Planning. In Annual Retliew. 01
Computer Science Volume .2, pages 359-400. Annual
Reviews Inc., Pa.lo Alto, CA, 1987.
[9] H. P. Grice. Logic and conversation. In P. Cole
and J. L. Morgan, editors, Syntaz and Semantic. 3:
SpeechAct.. Academic Press, New York, 1975.
[22] S. C. Shapiro a.ndW. J. Rapaport. SNePS considered
&8 a fully intensional propoeitiona.l semantic network.
In N. Cercone and G. McCalla., editors, The Knowledge Frontier, pages 263-315. Springer-Verlag, New
York, 1987.
[23] David E. Wilkins. Proctical Planning-Eztending the
Clcu.ical AI Planning Paradigm. Morgan Ka.ufmann,
Pa.lo Alto, CA, 1988.
 0
0
advertisement

Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users