Differential Analysis Lecture notes for 18.155 and 156 Richard B. Melrose
advertisement

Differential Analysis
Lecture notes for 18.155 and 156
Richard B. Melrose
Contents
Introduction
6
Chapter 1. Measure and Integration
1. Continuous functions
2. Measures and σ-algebras
3. Measureability of functions
4. Integration
7
7
14
20
22
Chapter 2. Hilbert spaces and operators
1. Hilbert space
2. Spectral theorem
35
35
38
Chapter 3. Distributions
1. Test functions
2. Tempered distributions
3. Convolution and density
4. Fourier inversion
5. Sobolev embedding
6. Differential operators.
7. Cone support and wavefront set
8. Homogeneous distributions
9. Operators and kernels
10. Fourier transform
11. Schwartz space.
12. Tempered distributions.
13. Fourier transform
14. Sobolev spaces
15. Weighted Sobolev spaces.
16. Multiplicativity
17. Some bounded operators
43
43
50
55
65
70
74
89
102
103
103
103
104
105
106
109
112
115
Chapter 4. Elliptic Regularity
1. Constant coefficient operators
2. Constant coefficient elliptic operators
3. Interior elliptic estimates
117
117
119
126
3
4
CONTENTS
Addenda to Chapter 4
135
Chapter 5. Coordinate invariance and manifolds
1. Local diffeomorphisms
2. Manifolds
3. Vector bundles
137
137
141
147
Chapter 6. Invertibility of elliptic operators
1. Global elliptic estimates
2. Compact inclusion of Sobolev spaces
3. Elliptic operators are Fredholm
4. Generalized inverses
5. Self-adjoint elliptic operators
6. Index theorem
Addenda to Chapter 6
149
149
152
153
157
160
165
165
Chapter 7. Suspended families and the resolvent
1. Product with a line
2. Translation-invariant Operators
3. Invertibility
4. Resolvent operator
Addenda to Chapter 7
167
167
174
180
185
185
Chapter 8. Manifolds with boundary
1. Compactifications of R.
2. Basic properties
3. Boundary Sobolev spaces
4. Dirac operators
5. Homogeneous translation-invariant operators
6. Scattering structure
187
187
191
192
192
192
195
Chapter 9. Electromagnetism
1. Maxwell’s equations
2. Hodge Theory
3. Coulomb potential
4. Dirac strings
Addenda to Chapter 9
201
201
204
208
208
208
Chapter 10. Monopoles
1. Gauge theory
2. Bogomolny equations
3. Problems
4. Solutions to (some of) the problems
209
209
209
209
236
CONTENTS
Bibliography
5
243
6
CONTENTS
Introduction
These notes are for the graduate analysis courses (18.155 and 18.156)
at MIT. They are based on various earlier similar courses. In giving
the lectures I usually cut many corners!
To thank:- Austin Frakt, Philip Dorrell, Jacob Bernstein....
CHAPTER 1
Measure and Integration
A rather quick review of measure and integration.
1. Continuous functions
A the beginning I want to remind you of things I think you already
know and then go on to show the direction the course will be taking.
Let me first try to set the context.
One basic notion I assume you are reasonably familiar with is that
of a metric space ([6] p.9). This consists of a set, X, and a distance
function
d : X × X = X 2 −→ [0, ∞) ,
satisfying the following three axioms:
i) d(x, y) = 0 ⇔ x = y, (and d(x, y) ≥ 0)
(1.1)
ii) d(x, y) = d(y, x) ∀ x, y ∈ X
iii) d(x, y) ≤ d(x, z) + d(z, y) ∀ x, y, z ∈ X.
The basic theory of metric spaces deals with properties of subsets
(open, closed, compact, connected), sequences (convergent, Cauchy)
and maps (continuous) and the relationship between these notions.
Let me just remind you of one such result.
Proposition 1.1. A map f : X → Y between metric spaces is
continuous if and only if one of the three following equivalent conditions
holds
(1) f −1 (O) ⊂ X is open ∀ O ⊂ Y open.
(2) f −1 (C) ⊂ X is closed ∀ C ⊂ Y closed.
(3) limn→∞ f (xn ) = f (x) in Y if xn → x in X.
The basic example of a metric space is Euclidean space. Real ndimensional Euclidean space, Rn , is the set of ordered n-tuples of real
numbers
x = (x1 , . . . , xn ) ∈ Rn , xj ∈ R , j = 1, . . . , n .
7
8
1. MEASURE AND INTEGRATION
It is also the basic example of a vector (or linear) space with the operations
x + y = (x1 + y1 , x2 + y2 , . . . , xn + yn )
cx = (cx1 , . . . , cxn ) .
The metric is usually taken to be given by the Euclidean metric
n
X
2
2 1/2
|x| = (x1 + · · · + xn ) = (
x2j )1/2 ,
j=1
in the sense that
d(x, y) = |x − y| .
Let us abstract this immediately to the notion of a normed vector
space, or normed space. This is a vector space V (over R or C) equipped
with a norm, which is to say a function
k k : V −→ [0, ∞)
satisfying
i) kvk = 0 ⇐⇒ v = 0,
(1.2)
ii) kcvk = |c| kvk ∀ c ∈ K,
iii) kv + wk ≤ kvk + kwk.
This means that (V, d), d(v, w) = kv − wk is a vector space; I am also
using K to denote either R or C as is appropriate.
The case of a finite dimensional normed space is not very interesting
because, apart from the dimension, they are all “the same”. We shall
say (in general) that two norms k • k1 and k • k2 on V are equivalent
of there exists C > 0 such that
1
kvk1 ≤ kvk2 ≤ Ckvk1 ∀ v ∈ V .
C
Proposition 1.2. Any two norms on a finite dimensional vector
space are equivalent.
So, we are mainly interested in the infinite dimensional case. I will
start the course, in a slightly unorthodox manner, by concentrating on
one such normed space (really one class). Let X be a metric space.
The case of a continuous function, f : X → R (or C) is a special case
of Proposition 1.1 above. We then define
C(X) = {f : X → R, f bounded and continuous} .
In fact the same notation is generally used for the space of complexvalued functions. If we want to distinguish between these two possibilities we can use the more pedantic notation C(X; R) and C(X; C).
1. CONTINUOUS FUNCTIONS
9
Now, the ‘obvious’ norm on this linear space is the supremum (or ‘uniform’) norm
kf k∞ = sup |f (x)| .
x∈X
Here X is an arbitrary metric space. For the moment X is supposed to be a “physical” space, something like Rn . Corresponding to
the finite-dimensionality of Rn we often assume (or demand) that X
is locally compact. This just means that every point has a compact
neighborhood, i.e., is in the interior of a compact set. Whether locally
compact or not we can consider
(1.3) C0 (X) = f ∈ C(X); ∀ > 0 ∃ K b Xs.t. sup |f (x)| ≤ .
x∈K
/
Here the notation K b X means ‘K is a compact subset of X’.
If V is a normed linear space we are particularly interested in the
continuous linear functionals on V . Here ‘functional’ just means function but V is allowed to be ‘large’ (not like Rn ) so ‘functional’ is used
for historical reasons.
Proposition 1.3. The following are equivalent conditions on a
linear functional u : V −→ R on a normed space V .
(1) u is continuous.
(2) u is continuous at 0.
(3) {u(f ) ∈ R ; f ∈ V , kf k ≤ 1} is bounded.
(4) ∃ C s.t. |u(f )| ≤ Ckf k ∀ f ∈ V .
Proof. (1) =⇒ (2) by definition. Then (2) implies that u−1 (−1, 1)
is a neighborhood of 0 ∈ V , so for some > 0, u({f ∈ V ; kf k < }) ⊂
(−1, 1). By linearity of u, u({f ∈ V ; kf k < 1}) ⊂ (− 1 , 1 ) is bounded,
so (2) =⇒ (3). Then (3) implies that
|u(f )| ≤ C ∀ f ∈ V, kf k ≤ 1
for some C. Again using linearity of u, if f 6= 0,
f
|u(f )| ≤ kf ku
≤ Ckf k ,
kf k
giving (4). Finally, assuming (4),
|u(f ) − u(g)| = |u(f − g)| ≤ Ckf − gk
shows that u is continuous at any point g ∈ V .
In view of this identification, continuous linear functionals are often
said to be bounded. One of the important ideas that we shall exploit
later is that of ‘duality’. In particular this suggests that it is a good
10
1. MEASURE AND INTEGRATION
idea to examine the totality of bounded linear functionals on V . The
dual space is
V 0 = V ∗ = {u : V −→ K , linear and bounded} .
This is also a normed linear space where the linear operations are
(1.4)
(u + v)(f ) = u(f ) + v(f )
∀ f ∈ V.
(cu)(f ) = c(u(f ))
The natural norm on V 0 is
kuk = sup |u(f )|.
kf k≤1
This is just the ‘best constant’ in the boundedness estimate,
kuk = inf {C; |u(f )| ≤ Ckf k ∀ f ⊂ V } .
One of the basic questions I wish to pursue in the first part of the
course is: What is the dual of C0 (X) for a locally compact metric space
X? The answer is given by Riesz’ representation theorem, in terms of
(Borel) measures.
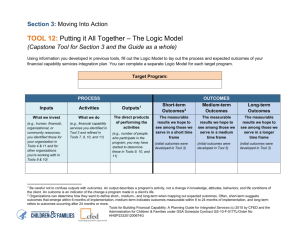
Let me give you a vague picture of ‘regularity of functions’ which
is what this course is about, even though I have not introduced most
of these spaces yet. Smooth functions (and small spaces) are towards
the top. Duality flips up and down and as we shall see L2 , the space
of Lebesgue square-integrable functions, is generally ‘in the middle’.
What I will discuss first is the right side of the diagramme, where we
have the space of continuous functions on Rn which vanish at infinity
and its dual space, Mfin (Rn ), the space of finite Borel measures. There
are many other spaces that you may encounter, here I only include test
functions, Schwartz functions, Sobolev spaces and their duals; k is a
1. CONTINUOUS FUNCTIONS
11
general positive integer.
(1.5)
S(R n ) Uw UU
_
UUUU
UUUU
UUUU
UUUU
UUU*
n
n
/ C0 (Rn )
C
(R
)
H k (R
)
c
_
_
k
s
ss K
sss
s
s
yss
b
L2 (R
) s
_
KKK
KKK
KKK
K%
_
0
S (Rn ).
? _ Mfin (Rn )
i
i g
iiii G
i
i
i
iii
iiii
it iii
n
H −k (R
)
M (Rn ) o
I have set the goal of understanding the dual space Mfin (Rn ) of
C0 (X), where X is a locally compact metric space. This will force me
to go through the elements of measure theory and Lebesgue integration.
It does require a little forcing!
The basic case of interest is Rn . Then an obvious example of a
continuous linear functional on C0 (Rn ) is given by Riemann integration,
for instance over the unit cube [0, 1]n :
Z
u(f ) =
f (x) dx .
[0,1]n
In some sense we must show that all continuous linear functionals
on C0 (X) are given by integration. However, we have to interpret
integration somewhat widely since there are also evaluation functionals.
If z ∈ X consider the Dirac delta
δz (f ) = f (z) .
This is also called a point mass of z. So we need a theory of measure
and integration wide enough to include both of these cases.
One special feature of C0 (X), compared to general normed spaces,
is that there is a notion of positivity for its elements. Thus f ≥ 0 just
means f (x) ≥ 0 ∀ x ∈ X.
Lemma 1.4. Each f ∈ C0 (X) can be decomposed uniquely as the
difference of its positive and negative parts
(1.6)
f = f+ − f− , f± ∈ C0 (X) , f± (x) ≤ |f (x)| ∀ x ∈ X .
12
1. MEASURE AND INTEGRATION
Proof. Simply define
±f (x)
f± (x) =
0
if
if
±f (x) ≥ 0
±f (x) < 0
for the same sign throughout. Then (3.8) holds. Observe that f+ is
continuous at each y ∈ X since, with U an appropriate neighborhood
of y, in each case
f (y) > 0 =⇒ f (x) > 0 for x ∈ U =⇒ f+ = f in U
f (y) < 0 =⇒ f (x) < 0 for x ∈ U =⇒ f+ = 0 in U
f (y) = 0 =⇒ given > 0 ∃ U s.t. |f (x)| < in U
=⇒ |f+ (x)| < in U .
Thus f− = f −f+ ∈ C0 (X), since both f+ and f− vanish at infinity. We can similarly split elements of the dual space into positive and
negative parts although it is a little bit more delicate. We say that
u ∈ (C0 (X))0 is positive if
u(f ) ≥ 0 ∀ 0 ≤ f ∈ C0 (X) .
(1.7)
For a general (real) u ∈ (C0 (X))0 and for each 0 ≤ f ∈ C0 (X) set
u+ (f ) = sup {u(g) ; g ∈ C0 (X) , 0 ≤ g(x) ≤ f (x) ∀ x ∈ X} .
(1.8)
This is certainly finite since u(g) ≤ Ckgk∞ ≤ Ckf k∞ . Moreover, if
0 < c ∈ R then u+ (cf ) = cu+ (f ) by inspection. Suppose 0 ≤ fi ∈
C0 (X) for i = 1, 2. Then given > 0 there exist gi ∈ C0 (X) with
0 ≤ gi (x) ≤ fi (x) and
u+ (fi ) ≤ u(gi ) + .
It follows that 0 ≤ g(x) ≤ f1 (x) + f2 (x) if g = g1 + g2 so
u+ (f1 + f2 ) ≥ u(g) = u(g1 ) + u(g2 ) ≥ u+ (f1 ) + u+ (f2 ) − 2 .
Thus
u+ (f1 + f2 ) ≥ u+ (f1 ) + u+ (f2 ).
Conversely, if 0 ≤ g(x) ≤ f1 (x) + f2 (x) set g1 (x) = min(g, f1 ) ∈
C0 (X) and g2 = g − g1 . Then 0 ≤ gi ≤ fi and u+ (f1 ) + u+ (f2 ) ≥
u(g1 ) + u(g2 ) = u(g). Taking the supremum over g, u+ (f1 + f2 ) ≤
u+ (f1 ) + u+ (f2 ), so we find
(1.9)
u+ (f1 + f2 ) = u+ (f1 ) + u+ (f2 ) .
Having shown this effective linearity on the positive functions we
can obtain a linear functional by setting
(1.10)
u+ (f ) = u+ (f+ ) − u+ (f− ) ∀ f ∈ C0 (X) .
1. CONTINUOUS FUNCTIONS
13
Note that (1.9) shows that u+ (f ) = u+ (f1 ) − u+ (f2 ) for any decomposiiton of f = f1 − f2 with fi ∈ C0 (X), both positive. [Since f1 + f− =
f2 + f+ so u+ (f1 ) + u+ (f− ) = u+ (f2 ) + u+ (f+ ).] Moreover,
|u+ (f )| ≤ max(u+ (f+ ), u(f− )) ≤ kuk kf k∞
=⇒ ku+ k ≤ kuk .
The functional
u− = u+ − u
is also positive, since u+ (f ) ≥ u(f ) for all 0 ≤ f ∈ C0 (x). Thus we
have proved
Lemma 1.5. Any element u ∈ (C0 (X))0 can be decomposed,
u = u+ − u−
into the difference of positive elements with
ku+ k , ku− k ≤ kuk .
The idea behind the definition of u+ is that u itself is, more or
less, “integration against a function” (even though we do not know
how to interpret this yet). In defining u+ from u we are effectively
throwing away the negative part of that ‘function.’ The next step is
to show that a positive functional corresponds to a ‘measure’ meaning
a function measuring the size of sets. To define this we really want to
evaluate u on the characteristic function of a set
1 if x ∈ E
χE (x) =
0 if x ∈
/ E.
The problem is that χE is not continuous. Instead we use an idea
similar to (15.9).
If 0 ≤ u ∈ (C0 (X))0 and U ⊂ X is open, set1
(1.11) µ(U ) = sup {u(f ) ; 0 ≤ f (x) ≤ 1, f ∈ C0 (X) , supp(f ) b U } .
Here the support of f , supp(f ), is the closure of the set of points where
f (x) 6= 0. Thus supp(f ) is always closed, in (15.4) we only admit f if
its support is a compact subset of U. The reason for this is that, only
then do we ‘really know’ that f ∈ C0 (X).
Suppose we try to measure general sets in this way. We can do this
by defining
(1.12)
µ∗ (E) = inf {µ(U ) ; U ⊃ E , U open} .
Already with µ it may happen that µ(U ) = ∞, so we think of
(1.13)
1See
µ∗ : P(X) → [0, ∞]
[6] starting p.42 or [1] starting p.206.
14
1. MEASURE AND INTEGRATION
as defined on the power set of X and taking values in the extended
positive real numbers.
Definition 1.6. A positive extended function, µ∗ , defined on the
power set of X is called an outer measure if µ∗ (∅) = 0, µ∗ (A) ≤ µ∗ (B)
whenever A ⊂ B and
[
X
(1.14)
µ∗ ( Aj ) ≤
µ(Aj ) ∀ {Aj }∞
j=1 ⊂ P(X) .
j
j
Lemma 1.7. If u is a positive continuous linear functional on C0 (X)
then µ∗ , defined by (15.4), (15.12) is an outer measure.
To prove this we need to find enough continuous functions. I have
relegated the proof of the following result to Problem 2.
Lemma 1.8. Suppose Ui , i = 1, . . . , N is ,a finite
S collection of open
sets in a locally compact metric space and K b N
i=1 Ui is a compact
subset, then there exist continuous functions fi ∈ C(X) with 0 ≤ fi ≤
1, supp(fi ) b Ui and
X
(1.15)
fi = 1 in a neighborhood of K .
i
Proof of Lemma 15.8. We have to S
prove (15.6). Suppose first
that the Ai are open, then so is A = i Ai . If f ∈ C(X) and
supp(f ) b A then supp(f ) is covered by a finite union of the Ai s.
Applying Lemma 15.7 we can find fP
i ’s, all but a finite number identically zero, so supp(fi ) b Ai and
i fi = 1 in a neighborhood of
supp(f ).
P
Since f = i fi f we conclude that
X
X
u(f ) =
u(fi f ) =⇒ µ∗ (A) ≤
µ∗ (Ai )
i
i
since 0 ≤ fi f ≤ 1 and supp(fi f ) b Ai .
Thus (15.6) holds when the Ai are open. In the general case if
Ai ⊂ Bi with the Bi open then, from the definition,
[
[
X
µ∗ ( Ai ) ≤ µ∗ ( Bi ) ≤
µ∗ (Bi ) .
i
i
i
Taking the infimum over the Bi gives (15.6) in general.
2. Measures and σ-algebras
An outer measure such as µ∗ is a rather crude object since, even
if the Ai are disjoint, there is generally strict inequality in (15.6). It
turns out to be unreasonable to expect equality in (15.6), for disjoint
2. MEASURES AND σ-ALGEBRAS
15
unions, for a function defined on all subsets of X. We therefore restrict
attention to smaller collections of subsets.
Definition 2.1. A collection of subsets M of a set X is a σ-algebra
if
(1) φ, X ∈ M
(2) E ∈ M =⇒ E C = S
X\E ∈ M
∞
(3) {Ei }i=1 ⊂ M =⇒ ∞
i=1 Ei ∈ M.
For a general outer measure µ∗ we define the notion of µ∗ -measurability
of a set.
Definition 2.2. A set E ⊂ X is µ∗ -measurable (for an outer measure µ∗ on X) if
(2.1)
µ∗ (A) = µ∗ (A ∩ E) + µ∗ (A ∩ E { ) ∀ A ⊂ X .
Proposition 2.3. The collection of µ∗ -measurable sets for any
outer measure is a σ-algebra.
Proof. Suppose E is µ∗ -measurable, then E C is µ∗ -measurable by
the symmetry of (3.9).
Suppose A, E and F are any three sets. Then
A ∩ (E ∪ F ) = (A ∩ E ∩ F ) ∪ (A ∩ E ∩ F C ) ∪ (A ∩ E C ∩ F )
A ∩ (E ∪ F )C = A ∩ E C ∩ F C .
From the subadditivity of µ∗
µ∗ (A ∩ (E ∪ F )) + µ∗ (A ∩ (E ∪ F )C )
≤ µ∗ (A ∩ E ∩ F ) + µ∗ (A ∩ E ∪ F C )
+ µ∗ (A ∩ E C ∩ F ) + µ∗ (A ∩ E C ∩ F C ).
Now, if E and F are µ∗ -measurable then applying the definition twice,
for any A,
µ∗ (A) = µ∗ (A ∩ E ∩ F ) + µ∗ (A ∩ E ∩ F C )
+ µ∗ (A ∩ E C ∩ F ) + µ∗ (A ∩ E C ∩ F C )
≥ µ∗ (A ∩ (E ∪ F )) + µ∗ (A ∩ (E ∪ F )C ) .
The reverse inequality follows from the subadditivity of µ∗ , so E ∪ F
is also µ∗ -measurable.
∞
of disjoint µ∗ -measurable sets, set Fn =
Sn If {Ei }i=1 is aSsequence
∞
i=1 Ei and F =
i=1 Ei . Then for any A,
µ∗ (A ∩ Fn ) = µ∗ (A ∩ Fn ∩ En ) + µ∗ (A ∩ Fn ∩ EnC )
= µ∗ (A ∩ En ) + µ∗ (A ∩ Fn−1 ) .
16
1. MEASURE AND INTEGRATION
Iterating this shows that
∗
µ (A ∩ Fn ) =
n
X
µ∗ (A ∩ Ej ) .
j=1
∗
From the µ -measurability of Fn and the subadditivity of µ∗ ,
µ∗ (A) = µ∗ (A ∩ Fn ) + µ∗ (A ∩ FnC )
n
X
≥
µ∗ (A ∩ Ej ) + µ∗ (A ∩ F C ) .
j=1
Taking the limit as n → ∞ and using subadditivity,
∞
X
∗
(2.2)
µ (A) ≥
µ∗ (A ∩ Ej ) + µ∗ (A ∩ F C )
j=1
≥ µ∗ (A ∩ F ) + µ∗ (A ∩ F C ) ≥ µ∗ (A)
proves that inequalities are equalities, so F is also µ∗ -measurable.
In general, for any countable union of µ∗ -measurable sets,
∞
∞
[
[
ej ,
Aj =
A
j=1
ej = Aj \
A
j=1
j−1
j−1
[
[
Ai = Aj ∩
i=1
!C
Ai
i=1
ej are disjoint.
is µ∗ -measurable since the A
A measure (sometimes called a positive measure) is an extended
function defined on the elements of a σ-algebra M:
µ : M → [0, ∞]
such that
(2.3)
µ(∅) = 0 and
!
∞
∞
[
X
µ
Ai =
µ(Ai )
(2.4)
i=1
i=1
if {Ai }∞
i=1 ⊂ M and Ai ∩ Aj = φ i 6= j.
The elements of M with measure zero, i.e., E ∈ M, µ(E) = 0, are
supposed to be ‘ignorable’. The measure µ is said to be complete if
(2.5)
E ⊂ X and ∃ F ∈ M , µ(F ) = 0 , E ⊂ F ⇒ E ∈ M .
See Problem 4.
2. MEASURES AND σ-ALGEBRAS
17
The first part of the following important result due to Caratheodory
was shown above.
Theorem 2.4. If µ∗ is an outer measure on X then the collection
of µ∗ -measurable subsets of X is a σ-algebra and µ∗ restricted to M is
a complete measure.
Proof. We have already shown that the collection of µ∗ -measurable
subsets of X is a σ-algebra. To see the second part, observe that taking
A = F in (3.11) gives
∞
X
[
∗
∗
µ (F ) =
µ (Ej ) if F =
Ej
j
j=1
and the Ej are disjoint elements of M. This is (3.3).
Similarly if µ∗ (E) = 0 and F ⊂ E then µ∗ (F ) = 0. Thus it is
enough to show that for any subset E ⊂ X, µ∗ (E) = 0 implies E ∈ M.
For any A ⊂ X, using the fact that µ∗ (A ∩ E) = 0, and the ‘increasing’
property of µ∗
µ∗ (A) ≤ µ∗ (A ∩ E) + µ∗ (A ∩ E C )
= µ∗ (A ∩ E C ) ≤ µ∗ (A)
shows that these must always be equalities, so E ∈ M (i.e., is µ∗ measurable).
Going back to our primary concern, recall that we constructed the
outer measure µ∗ from 0 ≤ u ∈ (C0 (X))0 using (15.4) and (15.12). For
the measure whose existence follows from Caratheodory’s theorem to
be much use we need
Proposition 2.5. If 0 ≤ u ∈ (C0 (X))0 , for X a locally compact
metric space, then each open subset of X is µ∗ -measurable for the outer
measure defined by (15.4) and (15.12) and µ in (15.4) is its measure.
Proof. Let U ⊂ X be open. We only need to prove (3.9) for all
A ⊂ X with µ∗ (A) < ∞.2
Suppose first that A ⊂ X is open and µ∗ (A) < ∞. Then A ∩ U
is open, so given > 0 there exists f ∈ C(X) supp(f ) b A ∩ U with
0 ≤ f ≤ 1 and
µ∗ (A ∩ U ) = µ(A ∩ U ) ≤ u(f ) + .
Now, A\ supp(f ) is also open, so we can find g ∈ C(X) , 0 ≤ g ≤
1 , supp(g) b A\ supp(f ) with
µ∗ (A\ supp(f )) = µ(A\ supp(f )) ≤ u(g) + .
2Why?
18
1. MEASURE AND INTEGRATION
Since
A\ supp(f ) ⊃ A ∩ U C , 0 ≤ f + g ≤ 1 , supp(f + g) b A ,
µ(A) ≥ u(f + g) = u(f ) + u(g)
> µ∗ (A ∩ U ) + µ∗ (A ∩ U C ) − 2
≥ µ∗ (A) − 2
using subadditivity of µ∗ . Letting ↓ 0 we conclude that
µ∗ (A) ≤ µ∗ (A ∩ U ) + µ∗ (A ∩ U C ) ≤ µ∗ (A) = µ(A) .
This gives (3.9) when A is open.
In general, if E ⊂ X and µ∗ (E) < ∞ then given > 0 there exists
A ⊂ X open with µ∗ (E) > µ∗ (A) − . Thus,
µ∗ (E) ≥ µ∗ (A ∩ U ) + µ∗ (A ∩ U C ) − ≥ µ∗ (E ∩ U ) + µ∗ (E ∩ U C ) − ≥ µ∗ (E) − .
This shows that (3.9) always holds, so U is µ∗ -measurable if it is open.
We have already observed that µ(U ) = µ∗ (U ) if U is open.
Thus we have shown that the σ-algebra given by Caratheodory’s
theorem contains all open sets. You showed in Problem 3 that the
intersection of any collection of σ-algebras on a given set is a σ-algebra.
Since P(X) is always a σ-algebra it follows that for any collection
E ⊂ P(X) there is always a smallest σ-algebra containing E, namely
\
ME =
{M ⊃ E ; M is a σ-algebra , M ⊂ P(X)} .
The elements of the smallest σ-algebra containing the open sets are
called ‘Borel sets’. A measure defined on the σ-algebra of all Borel sets
is called a Borel measure. This we have shown:
Proposition 2.6. The measure defined by (15.4), (15.12) from
0 ≤ u ∈ (C0 (X))0 by Caratheodory’s theorem is a Borel measure.
Proof. This is what Proposition 3.14 says! See how easy proofs
are.
We can even continue in the same vein. A Borel measure is said to
be outer regular on E ⊂ X if
(2.6)
µ(E) = inf {µ(U ) ; U ⊃ E , U open} .
Thus the measure constructed in Proposition 3.14 is outer regular on
all Borel sets! A Borel measure is inner regular on E if
(2.7)
µ(E) = sup {µ(K) ; K ⊂ E , K compact} .
2. MEASURES AND σ-ALGEBRAS
19
Here we need to know that compact sets are Borel measurable. This
is Problem 5.
Definition 2.7. A Radon measure (on a metric space) is a Borel
measure which is outer regular on all Borel sets, inner regular on open
sets and finite on compact sets.
Proposition 2.8. The measure defined by (15.4), (15.12) from
0 ≤ u ∈ (C0 (X))0 using Caratheodory’s theorem is a Radon measure.
Proof. Suppose K ⊂ X is compact. Let χK be the characteristic function of K , χK = 1 on K , χK = 0 on K C . Suppose
f ∈ C0 (X) , supp(f ) b X and f ≥ χK . Set
U = {x ∈ X ; f (x) > 1 − }
where > 0 is small. Thus U is open, by the continuity of f and
contains K. Moreover, we can choose g ∈ C(X) , supp(g) b U , 0 ≤
g ≤ 1 with g = 1 near3 K. Thus, g ≤ (1 − )−1 f and hence
µ∗ (K) ≤ u(g) = (1 − )−1 u(f ) .
Letting ↓ 0, and using the measurability of K,
µ(K) ≤ u(f )
⇒ µ(K) = inf {u(f ) ; f ∈ C(X) , supp(f ) b X , f ≥ χK } .
In particular this implies that µ(K) < ∞ if K b X, but is also proves
(3.17).
Let me now review a little of what we have done. We used the
positive functional u to define an outer measure µ∗ , hence a measure
µ and then checked the properties of the latter.
This is a pretty nice scheme; getting ahead of myself a little, let me
suggest that we try it on something else.
Let us say that Q ⊂ Rn is ‘rectangular’ if it is a product of finite
intervals (open, closed or half-open)
(2.8)
n
Y
Q=
(or[ai , bi ]or) ai ≤ bi
i=1
we all agree on its standard volume:
(2.9)
v(Q) =
n
Y
(bi − ai ) ∈ [0, ∞) .
i=1
3Meaning
in a neighborhood of K.
20
1. MEASURE AND INTEGRATION
Clearly if we have two such sets, Q1 ⊂ Q2 , then v(Q1 ) ≤ v(Q2 ). Let
us try to define an outer measure on subsets of Rn by
(∞
)
∞
X
[
(2.10)
v ∗ (A) = inf
v(Qi ) ; A ⊂
Qi , Qi rectangular .
i=1
i=1
We want to show that (3.22) does define an outer measure. This is
pretty easy; certainly v(∅) = 0. Similarly if {Ai }∞
i=1 are (disjoint) sets
and {Qij }∞
is
a
covering
of
A
by
open
rectangles
then all the Qij
i
i=1
S
together cover A = i Ai and
XX
v ∗ (A) ≤
v(Qij )
i
j
⇒ v ∗ (A) ≤
X
v ∗ (Ai ) .
i
So we have an outer measure. We also want
Lemma 2.9. If Q is rectangular then v ∗ (Q) = v(Q).
Assuming this, the measure defined from v ∗ using Caratheodory’s
theorem is called Lebesgue measure.
Proposition 2.10. Lebesgue measure is a Borel measure.
To prove this we just need to show that (open) rectangular sets are
v ∗ -measurable.
3. Measureability of functions
Suppose that M is a σ-algebra on a set X 4 and N is a σ-algebra on
another set Y. A map f : X → Y is said to be measurable with respect
to these given σ-algebras on X and Y if
(3.1)
f −1 (E) ∈ M ∀ E ∈ N .
Notice how similar this is to one of the characterizations of continuity
for maps between metric spaces in terms of open sets. Indeed this
analogy yields a useful result.
Lemma 3.1. If G ⊂ N generates N , in the sense that
\
(3.2)
N = {N 0 ; N 0 ⊃ G, N 0 a σ-algebra}
then f : X −→ Y is measurable iff f −1 (A) ∈ M for all A ∈ G.
4Then
X, or if you want to be pedantic (X, M), is often said to be a measure
space or even a measurable space.
3. MEASUREABILITY OF FUNCTIONS
21
Proof. The main point to note here is that f −1 as a map on power
sets, is very well behaved for any map. That is if f : X → Y then
f −1 : P(Y ) → P(X) satisfies:
f −1 (E C ) = (f −1 (E))C
!
∞
∞
[
[
−1
f
Ej =
f −1 (Ej )
j=1
(3.3)
f
∞
\
−1
j=1
!
Ej
=
j=1
f
−1
(φ) = φ , f
∞
\
f −1 (Ej )
j=1
−1
(Y ) = X .
Putting these things together one sees that if M is any σ-algebra on
X then
(3.4)
f∗ (M) = E ⊂ Y ; f −1 (E) ∈ M
is always a σ-algebra on Y.
In particular if f −1 (A) ∈ M for all A ∈ G ⊂ N then f∗ (M) is a σalgebra containing G, hence containing N by the generating condition.
Thus f −1 (E) ∈ M for all E ∈ N so f is measurable.
Proposition 3.2. Any continuous map f : X → Y between metric
spaces is measurable with respect to the Borel σ-algebras on X and Y.
Proof. The continuity of f shows that f −1 (E) ⊂ X is open if E ⊂
Y is open. By definition, the open sets generate the Borel σ-algebra
on Y so the preceeding Lemma shows that f is Borel measurable i.e.,
f −1 (B(Y )) ⊂ B(X).
We are mainly interested in functions on X. If M is a σ-algebra
on X then f : X → R is measurable if it is measurable with respect
to the Borel σ-algebra on R and M on X. More generally, for an
extended function f : X → [−∞, ∞] we take as the ‘Borel’ σ-algebra
in [−∞, ∞] the smallest σ-algebra containing all open subsets of R and
all sets (a, ∞] and [−∞, b); in fact it is generated by the sets (a, ∞].
(See Problem 6.)
Our main task is to define the integral of a measurable function: we
start with simple functions. Observe that the characteristic function
of a set
1 x∈E
χE =
0 x∈
/E
22
1. MEASURE AND INTEGRATION
is measurable if and only if E ∈ M. More generally a simple function,
(3.5)
f=
N
X
ai χEi , ai ∈ R
i=1
is measurable if the Ei are measurable. The presentation, (3.5), of a
simple function is not unique. We can make it so, getting the minimal
presentation, by insisting that all the ai are non-zero and
Ei = {x ∈ E ; f (x) = ai }
then f in (3.5) is measurable iff all the Ei are measurable.
The Lebesgue integral is based on approximation of functions by
simple functions, so it is important to show that this is possible.
Proposition 3.3. For any non-negative µ-measurable extended function f : X −→ [0, ∞] there is an increasing sequence fn of simple measurable functions such that limn→∞ fn (x) = f (x) for each x ∈ X and
this limit is uniform on any measurable set on which f is finite.
Proof. Folland [1] page 45 has a nice proof. For each integer n > 0
and 0 ≤ k ≤ 22n − 1, set
En,k = {x ∈ X; 2−n k ≤ f (x) < 2−n (k + 1)},
En0 = {x ∈ X; f (x) ≥ 2n }.
These are measurable sets. On increasing n by one, the interval in the
definition of En,k is divided into two. It follows that the sequence of
simple functions
X
(3.6)
fn =
2−n kχEk,n + 2n χEn0
k
is increasing and has limit f and that this limit is uniform on any
measurable set where f is finite.
4. Integration
The (µ)-integral of a non-negative simple function is by definition
Z
X
(4.1)
f dµ =
ai µ(Y ∩ Ei ) , Y ∈ M .
Y
i
Here the convention is that if µ(Y ∩ Ei ) = ∞ but ai = 0 then ai · µ(Y ∩
Ei ) = 0. Clearly this integral takes values in [0, ∞]. More significantly,
4. INTEGRATION
23
if c ≥ 0 is a constant and f and g are two non-negative (µ-measurable)
simple functions then
Z
Z
cf dµ = c f dµ
Y
Z
Z Y
Z
(f + g)dµ =
f dµ +
gdµ
(4.2)
Y
Y
Y
Z
Z
0≤f ≤g ⇒
f dµ ≤
g dµ .
Y
Y
(See [1] Proposition 2.13 on page 48.)
To see this, observe that (4.1) holds for any presentation (3.5) of f
with all ai ≥ 0. Indeed, by restriction to Ei and division by ai (which
can be assumed non-zero) it is enough to consider the special case
X
χE =
bj χFj .
j
The Fj can always be written as the union of a finite number, N 0 ,
of disjoint measurable sets, Fj = ∪l∈Sj Gl where j = 1, . . . , N and
Sj ⊂ {1, . . . , N 0 }. Thus
X
X X
bj µ(Fj ) =
bj
µ(Gl ) = µ(E)
j
j
l∈Sj
P
since {j;l∈Sj } bj = 1 for each j.
From this all the statements follow easily.
Definition 4.1. For a non-negative µ-measurable extended function f : X −→ [0, ∞] the integral (with respect to µ) over any measurable set E ⊂ X is
Z
Z
(4.3)
f dµ = sup{ hdµ; 0 ≤ h ≤ f, h simple and measurable.}
E
E
R
By taking suprema, E f dµ has the first and last properties in (4.2).
It also has the middle property, but this is less obvious. To see this, we
shall prove the basic ‘Monotone convergence theorem’ (of Lebesgue).
Before doing so however, note what the vanishing of the integral means.
R
Lemma 4.2. If f : X −→ [0, ∞] is measurable then E f dµ = 0 for
a measurable set E if and only if
(4.4)
{x ∈ E; f (x) > 0} has measure zero.
Proof. If (4.4) holds, then any positive simple function bounded
above by f must also vanish outside a set of measure zero, so its integral
24
1. MEASURE AND INTEGRATION
R
must be zero and hence E f dµ = 0. Conversely, observe that the set
in (4.4) can be written as
[
En = {x ∈ E; f (x) > 1/n}.
n
Since these sets increase with n, if (4.4) does not hold then one of these
must have positive measure.
In that case the simple function n−1 χEn
R
has positive integral so E f dµ > 0.
Notice the fundamental difference in approach here between Riemann and Lebesgue integrals. The Lebesgue integral, (4.3), uses approximation by functions constant on possibly quite nasty measurable
sets, not just intervals as in the Riemann lower and upper integrals.
Theorem 4.3 (Monotone Convergence). Let fn be an increasing
sequence of non-negative measurable (extended) functions, then f (x) =
limn→∞ fn (x) is measurable and
Z
Z
(4.5)
f dµ = lim
fn dµ
E
n→∞
E
for any measurable set E ⊂ X.
Proof. To see that f is measurable, observe that
[
fn−1 (a, ∞].
(4.6)
f −1 (a, ∞] =
n
Since the sets (a, ∞] generate the Borel σ-algebra this shows that f is
measurable.
So we proceed to prove the main part of the proposition, which
is (4.5). Rudin has quite a nice proof of this, [6] page 21. Here I
paraphrase it. We can easily see from (4.1) that
Z
Z
Z
α = sup fn dµ = lim
fn dµ ≤
f dµ.
E
n→∞
E
E
Given a simple measurable function g with 0 ≤ g ≤ f and 0 < c < 1
consider the sets En = {x ∈ E; fn (x)
S≥ cg(x)}. These are measurable
and increase with n. Moreover E = n En . It follows that
Z
Z
Z
X
(4.7)
fn dµ ≥
fn dµ ≥ c
gdµ =
ai µ(En ∩ Fi )
E
En
En
i
P
in terms of the natural presentation of g = i ai χFi . Now, the fact
that the En are measurable and increase to E shows that
µ(En ∩ Fi ) → µ(E ∩ Fi )
4. INTEGRATION
25
R
as n → ∞. Thus
the right side of (4.7) tends to c E gdµ as n → ∞.
R
Hence α ≥ c E gdµ for all 0 < c < 1. Taking the supremum over c and
then over all such g shows that
Z
Z
Z
α = lim
fn dµ ≥ sup gdµ =
f dµ.
n→∞
E
E
E
They must therefore be equal.
Now for instance the additivity in (4.1) for f ≥ 0 and g ≥ 0 any
measurable functions follows from Proposition 3.3. Thus if f ≥ 0 is
measurable
and fn is an Rapproximating sequence as in the Proposition
R
then E f dµ = limn→∞ E fn dµ. So if f and g are two non-negative
measurable functions then fn (x) + gn (x) ↑ f + g(x) which shows not
only that f + g is measurable by also that
Z
Z
Z
gdµ.
f dµ +
(f + g)dµ =
E
E
E
As with the definition of u+ long ago, this allows us to extend the
definition of the integral to any integrable function.
Definition 4.4. A measurable extended function f : X −→ [−∞, ∞]
is said to be integrable on E if its positive and negative parts both have
finite integrals over E, and then
Z
Z
Z
f dµ =
f+ dµ −
f− dµ.
E
E
E
Notice if f is µ-integrable then so is |f |. One of the objects we wish
to study is the space of integrable functions. The fact that the integral
of |f | can vanish encourages us to look at what at first seems a much
more complicated object. Namely we consider an equivalence relation
between integrable functions
(4.8)
f1 ≡ f2 ⇐⇒ µ({x ∈ X; f1 (x) 6= f2 (x)}) = 0.
That is we identify two such functions if they are equal ‘off a set of
measure zero.’ Clearly if f1 ≡ f2 in this sense then
Z
Z
Z
Z
|f1 |dµ =
|f2 |dµ = 0,
f1 dµ =
f2 dµ.
X
X
X
X
A necessary condition for a measurable function f ≥ 0 to be integrable is
µ{x ∈ X; f (x) = ∞} = 0.
Let E be the (necessarily measureable) set where f = ∞. Indeed, if
this does not have measure zero, then the sequence of simple functions
26
1. MEASURE AND INTEGRATION
nχE ≤ f has integral tending to infinity. It follows that each equivalence class under (4.8) has a representative which is an honest function,
i.e. which is finite everywhere. Namely if f is one representative then
(
f (x) x ∈
/E
f 0 (x) =
0
x∈E
is also a representative.
We shall denote by L1 (X, µ) the space consisting of such equivalence
classes of integrable functions. This is a normed linear space as I ask
you to show in Problem 11.
The monotone convergence theorem often occurrs in the slightly
disguised form of Fatou’s Lemma.
Lemma 4.5 (Fatou). If fk is a sequence of non-negative integrable
functions then
Z
Z
lim inf fn dµ ≤ lim inf fn dµ .
n→∞
n→∞
Proof. Set Fk (x) = inf n≥k fn (x). Thus Fk is an increasing sequence of non-negative functions with limiting function lim inf n→∞ fn
and Fk (x) ≤ fn (x) ∀ n ≥ k. By the monotone convergence theorem
Z
Z
Z
lim inf fn dµ = lim
Fk (x) dµ ≤ lim inf fn dµ.
n→∞
n→∞
k→∞
We further extend the integral to complex-valued functions, just
saying that
f :X→C
is integrable if its real and imaginary parts are both integrable. Then,
by definition,
Z
Z
Z
f dµ =
Re f dµ + i Im f dµ
E
E
E
for any E ⊂ X measurable. It follows that if f is integrable then so is
|f |. Furthermore
Z
Z
f dµ ≤
|f | dµ .
E
E
R
This is obvious if E f dµ = 0, and if not then
Z
f dµ = Reiθ R > 0 , θ ⊂ [0, 2π) .
E
4. INTEGRATION
27
Then
Z
Z
f dµ = e−iθ
f dµ
E
E
Z
=
e−iθ f dµ
ZE
=
Re(e−iθ f ) dµ
ZE
Re(e−iθ f ) dµ
≤
ZE
Z
−iθ ≤
e f dµ =
|f | dµ .
E
E
The other important convergence result for integrals is Lebesgue’s
Dominated convergence theorem.
Theorem 4.6. If fn is a sequence of integrable functions, fk → f
a.e.5 and |fn | ≤ g for some integrable g then f is integrable and
Z
Z
f dµ = lim
fn dµ .
n→∞
Proof. First we can make the sequence fn (x) converge by changing all the fn (x)’s to zero on a set of measure zero outside which they
converge. This does not change the conclusions. Moreover, it suffices
to suppose that the fn are real-valued. Then consider
hk = g − fk ≥ 0 .
Now, lim inf k→∞ hk = g − f by the convergence of fn ; in particular f
is integrable. By monotone convergence and Fatou’s lemma
Z
Z
Z
(g − f )dµ = lim inf hk dµ ≤ lim inf (g − fk ) dµ
k→∞
k→∞
Z
Z
= g dµ − lim sup fk dµ .
k→∞
Similarly, if Hk = g + fk then
Z
Z
Z
Z
(g + f )dµ = lim inf Hk dµ ≤ g dµ + lim inf fk dµ.
k→∞
k→∞
It follows that
Z
lim sup
k→∞
5Means
Z
fk dµ ≤
Z
f dµ ≤ lim inf
k→∞
on the complement of a set of measure zero.
fk dµ.
28
1. MEASURE AND INTEGRATION
Thus in fact
Z
Z
fk dµ →
f dµ .
Having proved Lebesgue’s theorem of dominated convergence, let
me use it to show something important. As before, let µ be a positive
measure on X. We have defined L1 (X, µ); let me consider the more
general space Lp (X, µ). A measurable function
f :X→C
is said to be ‘Lp ’, for 1 ≤ p < ∞, if |f |p is integrable6, i.e.,
Z
|f |p dµ < ∞ .
X
As before we consider equivalence classes of such functions under the
equivalence relation
(4.9)
f ∼ g ⇔ µ {x; (f − g)(x) 6= 0} = 0 .
p
We denote by L (X, µ) the space of such equivalence classes. It is a
linear space and the function
1/p
Z
p
|f | dµ
(4.10)
kf kp =
X
is a norm (we always assume 1 ≤ p < ∞, sometimes p = 1 is excluded
but later p = ∞ is allowed). It is straightforward to check everything
except the triangle inequality. For this we start with
Lemma 4.7. If a ≥ 0, b ≥ 0 and 0 < γ < 1 then
aγ b1−γ ≤ γa + (1 − γ)b
(4.11)
with equality only when a = b.
Proof. If b = 0 this is easy. So assume b > 0 and divide by b.
Taking t = a/b we must show
(4.12)
tγ ≤ γt + 1 − γ , 0 ≤ t , 0 < γ < 1 .
The function f (t) = tγ − γt is differentiable for t > 0 with derivative
γtγ−1 − γ, which is positive for t < 1 and negative for t > 1. Thus
f (t) ≤ f (1) with equality only for t = 1. Since f (1) = 1 − γ, this is
(5.17), proving the lemma.
We use this to prove Hölder’s inequality
6Check
p
that |f | is automatically measurable.
4. INTEGRATION
29
Lemma 4.8. If f and g are measurable then
Z
f gdµ ≤ kf kp kgkq
(4.13)
for any 1 < p < ∞, with
1
p
+
1
q
= 1.
Proof. If kf kp = 0 or kgkq = 0 the result is trivial, as it is if either
is infinite. Thus consider
f (x) p
g(x) q
,b=
a = kgkq kf kp and apply (5.16) with γ = p1 . This gives
|f (x)g(x)|
|f (x)|p |g(x)|q
+
.
≤
kf kp kgkq
pkf kpp
qkgkqq
Integrating over X we find
1
kf kp kgkq
Z
|f (x)g(x)| dµ
X
≤
1 1
+ = 1.
p q
R
R
Since X f g dµ ≤ X |f g| dµ this implies (5.18).
The final inequality we need is Minkowski’s inequality.
Proposition 4.9. If 1 < p < ∞ and f, g ∈ Lp (X, µ) then
(4.14)
kf + gkp ≤ kf kp + kgkp .
Proof. The case p = 1 you have already done. It is also obvious
if f + g = 0 a.e.. If not we can write
|f + g|p ≤ (|f | + |g|) |f + g|p−1
and apply Hölder’s inequality, to the right side, expanded out,
Z
1/q
Z
p
q(p−1)
|f + g| dµ ≤ (kf kp + kgkp ) ,
|f + g|
dµ
.
Since q(p − 1) = p and 1 −
1
q
= 1/p this is just (5.20).
So, now we know that Lp (X, µ) is a normed space for 1 ≤ p < ∞. In
particular it is a metric space. One important additional property that
a metric space may have is completeness, meaning that every Cauchy
sequence is convergent.
30
1. MEASURE AND INTEGRATION
Definition 4.10. A normed space in which the underlying metric
space is complete is called a Banach space.
Theorem 4.11. For any measure space (X, M, µ) the spaces Lp (X, µ),
1 ≤ p < ∞, are Banach spaces.
Proof. We need to show that a given Cauchy sequence {fn } converges in Lp (X, µ). It suffices to show that it has a convergent subsequence. By the Cauchy property, for each k ∃ n = n(k) s.t.
kfn − f` kp ≤ 2−k ∀ ` ≥ n .
(4.15)
Consider the sequence
g1 = f1 , gk = fn(k) − fn(k−1) , k > 1 .
P
By (5.3), kgk kp ≤ 2−k , for k > 1, so the series k kgk kp converges, say
to B < ∞. Now set
n
∞
X
X
gk (x).
hn (x) =
|gk (x)| , n ≥ 1 , h(x) =
k=1
k=1
Then by the monotone convergence theorem
Z
Z
p
h dµ = lim
|hn |p dµ ≤ B p ,
n→∞
X
X
where we have also used Minkowski’s inequality. Thus h ∈ Lp (X, µ),
so the series
∞
X
f (x) =
gk (x)
k=1
converges (absolutely) almost everywhere. Since
p
n
X
p
|f (x)| = lim gk ≤ hp
n→∞ k=1
0
p
with h ∈ L (X, µ), the dominated convergence theorem applies and
shows that f ∈ Lp (X, µ). Furthermore,
`
X
p
gk (x) = fn(`) (x) and f (x) − fn(`) (x) ≤ (2h(x))p
k=1
so again by the dominated convergence theorem,
Z
f (x) − fn(`) (x)p → 0 .
X
Thus the subsequence fn(`) → f in Lp (X, µ), proving its completeness.
4. INTEGRATION
31
Next I want to return to our starting point and discuss the Riesz
representation theorem. There are two important results in measure
theory that I have not covered — I will get you to do most of them
in the problems — namely the Hahn decomposition theorem and the
Radon-Nikodym theorem. For the moment we can do without the
latter, but I will use the former.
So, consider a locally compact metric space, X. By a Borel measure
on X, or a signed Borel measure, we shall mean a function on Borel
sets
µ : B(X) → R
which is given as the difference of two finite positive Borel measures
(4.16)
µ(E) = µ1 (E) − µ2 (E) .
Similarly we shall say that µ is Radon, or a signed Radon measure, if
it can be written as such a difference, with both µ1 and µ2 finite Radon
measures. See the problems below for a discussion of this point.
Let Mfin (X) denote the set of finite Radon measures on X. This is
a normed space with
(4.17)
kµk1 = inf(µ1 (X) + µ2 (X))
with the infimum over all Radon decompositions (4.16). Each signed
Radon measure defines a continuous linear functional on C0 (X):
Z
Z
(4.18)
· dµ : C0 (X) 3 f 7−→
f · dµ .
X
Theorem 4.12 (Riesz representation.). If X is a locally compact
metric space then every continuous linear functional on C0 (X) is given
by a unique finite Radon measure on X through (4.18).
Thus the dual space of C0 (X) is Mfin (X) – at least this is how such
a result is usually interpreted
(4.19)
(C0 (X))0 = Mfin (X),
see the remarks following the proof.
Proof. We have done half of this already. Let me remind you of
the steps.
We started with u ∈ (C0 (X))0 and showed that u = u+ − u− where
u± are positive continuous linear functionals; this is Lemma 1.5. Then
we showed that u ≥ 0 defines a finite positive Radon measure µ. Here µ
is defined by (15.4) on open sets and µ(E) = µ∗ (E) is given by (15.12)
32
1. MEASURE AND INTEGRATION
on general Borel sets. It is finite because
(4.20)
µ(X) = sup {u(f ) ; 0 ≤ f ≤ 1 , supp f b X , f ∈ C(X)}
≤ kuk .
From Proposition 3.19 we conclude that µ is a Radon measure. Since
this argument applies to u± we get two positive finite Radon measures
µ± and hence a signed Radon measure
(4.21)
µ = µ+ − µ− ∈ Mfin (X).
In the problems you are supposed to prove the Hahn decomposition
theorem, in particular in Problem 14 I ask you to show that (4.21) is
the Hahn decomposition of µ — this means that there is a Borel set
E ⊂ X such that µ− (E) = 0 , µ+ (X \ E) = 0.
What we have defined is a linear map
(4.22)
(C0 (X))0 → M (X), u 7−→ µ .
We want to show that this is an isomorphism, i.e., it is 1 − 1 and onto.
We first show that it is 1 − 1. That is, suppose µ = 0. Given the
uniqueness of the Hahn decomposition this implies that µ+ = µ− = 0.
So we can suppose that u ≥ 0 and µ = µ+ = 0 and we have to show
that u = 0; this is obvious since
µ(X) = sup {u(f ); supp u b X, 0 ≤ f ≤ 1 f ∈ C(X)} = 0
(4.23)
⇒ u(f ) = 0 for all such f .
If 0 ≤ f ∈ C(X) and supp f b X then f 0 = f /kf k∞ is of this type
so u(f ) = 0 for every 0 ≤ f ∈ C(X) of compact support. From
the decomposition of continuous functions into positive and negative
parts it follows that u(f ) = 0 for every f of compact support. Now, if
f ∈ Co (X), then given n ∈ N there exists K b X such that |f | < 1/n
on X \ K. As you showed in the problems, there exists χ ∈ C(X) with
supp(χ) b X and χ = 1 on K. Thus if fn = χf then supp(fn ) b X and
kf − fn k = sup(|f − fn | < 1/n. This shows that C0 (X) is the closure
of the subspace of continuous functions of compact support so by the
assumed continuity of u, u = 0.
So it remains to show that every finite Radon measure on X arises
from (4.22). We do this by starting from µ and constructing u. Again
we use the Hahn decomposition of µ, as in (4.21)7. Thus we assume
µ ≥ 0 and construct u. It is obvious what we want, namely
Z
(4.24)
u(f ) =
f dµ , f ∈ Cc (X) .
X
7Actually
we can just take any decomposition (4.21) into a difference of positive
Radon measures.
4. INTEGRATION
33
Here we need to recall from Proposition 3.2 that continuous functions
on X, a locally compact metric space, are (Borel) measurable. Furthermore, we know that there is an increasing sequence of simple functions
with limit f , so
Z
≤ µ(X) · kf k∞ .
(4.25)
f
dµ
X
This shows that u in (4.24) is continuous and that its norm kuk ≤
µ(X). In fact
kuk = µ(X) .
(4.26)
Indeed, the inner regularity of µ implies that there is a compact set
K b X with µ(K) ≥ µ(X)− n1 ; then there is f ∈ Cc (X) with 0 ≤ f ≤ 1
and f = 1 on K. It follows that µ(f ) ≥ µ(K) ≥ µ(X) − n1 , for any n.
This proves (4.26).
We still have to show that if u is defined by (4.24), with µ a finite
positive Radon measure, then the measure µ̃ defined from u via (4.24)
is precisely µ itself.
This is easy provided we keep things clear. Starting from µ ≥ 0 a
finite Radon measure, define u by (4.24) and, for U ⊂ X open
Z
f dµ, 0 ≤ f ≤ 1, f ∈ C(X), supp(f ) b U .
(4.27) µ̃(U ) = sup
X
By the properties of the integral, µ̃(U ) ≤ µ(U ). Conversely if K b U
there exists an element f ∈ Cc (X), 0 ≤ f ≤ 1, f = 1 on K and
supp(f ) ⊂ U. Then we know that
Z
f dµ ≥ µ(K).
(4.28)
µ̃(U ) ≥
X
By the inner regularity of µ, we can choose K b U such that µ(K) ≥
µ(U ) − , given > 0. Thus µ̃(U ) = µ(U ).
This proves the Riesz representation theorem, modulo the decomposition of the measure - which I will do in class if the demand is there!
In my view this is quite enough measure theory.
Notice that we have in fact proved something stronger than the
statement of the theorem. Namely we have shown that under the
correspondence u ←→ µ,
(4.29)
kuk = |µ| (X) =: kµk1 .
Thus the map is an isometry.