18.336 Pset 1 Solutions Problem 1: Trig. interp. poly.
advertisement

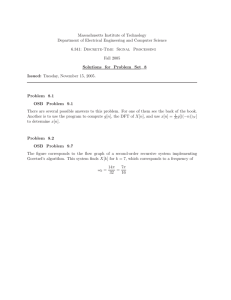
18.336 Pset 1 Solutions 0 10 −1 10 Problem 1: Trig. interp. poly. −2 10 When aliasing is included, the general form |ρ(x) − d2φ100/dx2| (a) for the interpolated function is: f (x) = N −1 X ck ei(k+`k N )x , k=0 −3 10 −4 10 −5 10 −6 10 −7 10 and thus the mean-square slope is: −8 10 1 2π Z 2π 0 2 |f (x)| dx = 0 N −1 X 2 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 x / 2π 2 (k + `k N ) |ck | k=0 Figure 1: The absolute error since the integration kills all of the cross terms in the squared summation, by the usual orthog- x/2π , onality. the derivative Each of these terms is non-negative, |ρ(x) − φ00N (x)| vs. using a nite-dierence approximation for φ00N . and so the mean-square slope is minimized when (k +`k N )2 is minimized indepen- Problem 2: Solving Poisson's eq. N = 2M + 1 (odd), then for k ≤ M via nite dif(a) To evaluate φ00 this is minimized for `k = 0, and for k > M N (x) in Matlab, we simply use it is minimized for `k = −1 (since in that case ferences This is |k −N | ≤ M < k ). Q.E.D. (since M = (N −1)/2 diff(diff(phi))/(2*pi/100)^2. equivalent to: and M + 1 = (N + 1)/2). each coecient dently. If (b) The symmetric form from (a) can equiva- φN (x + ∆x) − 2φN (x) + φN (x − ∆x) φ00N (x) ∼ = ∆x2 lently be written as M X f (x) = which (as we shall explore in more detail in ck eikx , lecture) is a second-order approximation with k=−M where c−k ≡ cN −k O(∆x2 ) error. versus x using according to aliasing. Since that discontinuity, but in this case the error is exactly zero there, and the error elsewhere is lower than we might expect from pessimistic upper bounds. (Similarly, in Fourier space the and thus f (x) = c0 + M X due to Gibb's phenomena. ikx (ck e + (b) L2 ρ(x). First, the original discontinuous sawtooth ρ1 (x). Second, ρ2 (x) = | sin x| − 2/π which is continuous c∗k e−ikx ). c0 = c∗0 2<[ck eikx ]. This is manifestly real, since each term in the sum is not a unique nomial, however. any c0 = 0 coecient O(1) is computed exactly.) Still, the peak error is error k=1 This is this approximation. As we noted often, the peak error would be at the point of fn (fn = fn∗ ) it immediately follows c−k = c∗k , |ρ(x) − φ00N (x)| in class, there is a happy accident in this case N −1 1 X nk ck = fn ωN , N n=0 then for real In gure 1 we plot is real and In gure 2, we show the approximate ∆N vs. N for three functions with discontinuous slope. Third, we consider ρ3 (x) = 2x/π − 1 + cos x for x < π and ρ3 (x) = 2x/π − 3 − cos x for x > π , which is continuous real interpolating poly- In particular, we could also as long as `−k ≡ `N −k + 1 = −`k , as this would preserve the property that we with continuous rst derivative but discontinu- have a sum of terms and their complex conju- ness (see below), we see that gates. O(1/N 2 ) choose shifts `k ous second derivative. After some initial bumpi- 1 both ρ1 and ρ2 give convergence. The simple upper bound 0 0 10 10 ρ = sawtooth ρ = |sin x| ρ = 2x/π ± cos x ... −2 10 −2 10 1/N2 1/N approx. L2 error ∆N approx. L2 error ∆N −4 10 4 −4 10 −6 10 −8 10 −10 10 −6 10 −8 10 −10 10 −12 10 −12 10 −14 10 −14 10 −16 10 −16 10 −18 1 2 10 3 10 10 4 10 10 0 10 20 30 40 50 Figure 2: Approximate three ρ(x) L2 1/N 4 and N vs. for Figure 3: Approximate 1 ρ(x) = f (x)− 2π 1/(2 + cos x). with delta-function rst, second, and third derivatives respectively. 1/N 2 ∆N error 60 70 80 90 100 N N smooth Also shown are L R 2 error ∆N vs. N for f (x)dx, where f (x) = lines, for reference. ric convergence. We therefore plot on a semilog from class would be 2 O(1/N ) and O(1/N ) for discontinuous for discontinuous-slope explained in class why this ρ1 ρ, scale, and indeed obtain the expected straight- ρ line but we e−αN behavior. At least, we get a straight line until the error reaches happens to do bet- 10−16 or so, at which the point it saturatesthis is nothing more than the general upper bound for discontinuoussecond- limit imposed by the nite precision of double- ter. ρ3 The convergence goes as 4 O(1/N ); but this function hap- precision oating-point arithmetic (numbers on pens to do better because of a similar accident the computer are represented with only about 16 ρ derivative as ρ1 is 3 O(1/N ), (we have constructed ρ3 so that its is summed exactly, whereas this is ρ2 ) not signicant digits of precision). c0 = 0 true for . Problem 3: FFTs The initial bumpiness of the ρ1 convergence For radix-2 DIT Cooley-Tukey, the outputs are is not random, howeverit follows a straight line with puted 1/N ∆N for more N Θ(1/N 2 ). N, where ∆N is N1 = 2 and N2 = N/2): values we would see that there are a whole sequence of ing to large computed via (from class, taking convergence. In fact, if we com- N points, extendN 1 2 −1 X X Θ(1/N ) instead of y N n2 k 2 n1 k 1 ω n1 k2 ω2 xn1 +2n2 ωN/2 k1 +k2 = N What's going on? The answer is that there is a bug in the code: at the point 2 n1 =0 x = π, n2 =0 ρ1 (π) should be zero, but because of rounding er- where the inner sum is a size-N/2 DFT comlinspace function the middle x value puted recursively, and the outer sum is a size-2 is sometimes slightly greater or less than pi, and DFT. for these values of N we get sum(rho) 6= 0. Then (a) Let T (N ) be the number of real-arithmetic the c0 Fourier coecient is not computed exactly operations. Then T (N ) = 2T (N/2) + Θ(N ) + and the error returns to the 1/N upper bound. (N/2)T (2), where the Θ(N ) represents the mul2 n1 k 2 To x this and get O(1/N ) convegence everytiplications by the twiddle factors ωN . To get where we could simply set rho(N/2+1)=0, howT (N ) more explicitly, we need to count the numever. ber of operations in T (2) and the twiddle multiFinally, in gure 3, we show ∆N for ρ(x) = plications. R 2π 1 dx 1/(1+2 cos x)− 2π , which is smooth T (2) is easy since ω2 = e−πi = −1: a DFT 0 1+2 cos x on the real-x axis and should thus give geometof length 2 is just an addition y0 = x0 + x1 and ror in the 2 a subtraction y1 = x0 − x1 , and since these are the usual conjugate symmetry, and similarly for T (2) = 4. n1 k 2 the ωN mul- ok2 . complex-number additions we get Naively, we might think that tiplications require N complex multiplications, but many of these are multiplications by hence have no cost. N/2 1 1 k yk = ek + ωN ok and n1 = 0 In particular, for they are multiplications by to consider the In order to combine the outputs of these two sub-DFTs, we must do: for so we only need multiplications for Some of these also simplify: for k2 = 0 0 ≤ k < N/2, and k yN/2+k = ek − ωN ok for the other halfthis is the DFT of size 2 (the n1 = 1 . n1 it is 1, yN −k = yk∗ , we need only compute half of these outputs (0 ≤ k ≤ N/2). Right away, this saves us half of the 4N/2 sum). However, since k2 = N/4 it is −i which is also cost-free, really care about counting operations additions that were previously required for the you also must note that for k2 = N/4 ± N/8 √ T (2) transforms. However, it still seems like we you get −(i ± 1)/ 2 which requires only 2 real k are multiplying by N/2 twiddle factors ωN we multiplications and 2 real additions. However, and for and if you need to save half of these somehow. the important point is that the number of these We can save half of the twiddle multiplies by special cases is bounded (at most four of them), using the conjugate symmetry of and so we know that the twiddle multiplications require 6N/2 − O(1) get real-arithmetic operations (since each general complex multiply takes 6 op- yN/2−k for k < N/4. N/2−k yN/2−k = eN/2−k +ωN erations). Thus, we now know that ek and ok , to In particular: k oN/2−k = e∗k −(ωN ok )∗ , N/2−k T (N ) = 2T (N/2) + 5N − O(1) where we have used the fact that ωN = −k = 2[2T (N/4) + 5N/2 − O(1)] + 5N − O(1) −ωN . Therefore, we only need to compute k ωN ok for k ≤ N/4 and obtain the N/4 < = ··· k < N/2 values by conjugation (which is only Now we are almost done. If we repeat this recur- a sign ip and requires no multiplies or addi- sively down to tions). Thus, we have saved roughly half of the From each N = 2, there are log2 N −1 stages. stage we pick up 5N operations (N 5N operations that were previously required to combine the sub-transforms: halves at each stage but the number of trans- 5N (log2 N − 1) O(1) operations multiplied by 1, 2, 4, · · · but the sum log2 N of this geometric series is ∼ 2 = N and thus this term is at most O(N ). Thus, forms doubles), which gives us 5 Tr (N ) = 2Tr (N/2) + N + O(1) 2 operations. From each stage we also pick up where #= (b) and Tr (N ) and denote the number of real- into two DFTs of length Tr (N ) = 2Tr (N/2)+??. real N/2, inputs and thus Denote the results of these two real-input sub-DFTs as ek2 and ok2 (the transforms of the even- and odd-indexed xn , respectively). 1 In 1968, Note that Yavne's split-radix eN/2−k2 = e∗k2 the same arguments by algorithm achieved T (N ) = 4N log2 N + Θ(N ), which was the best count for N = 2m for 36 years. The current best count for N = 2m , 34 achieved in 2004, is T (N ) = N log2 N + Θ(N ). 9 3 as above, and we asymptoti- cally save half the operations. Q.E.D. Then the Cooley-Tukey algorithm breaks the N by Tr (N ) = 52 N log2 N + O(N ) gorithm specialized to the case of real inputs. both of which again have bounded value that k = N/4 k = N/8, the k1 = 1, k2 = 0 term for yN/2 , the k1 = k2 = 0 term which is purely real. Then, arithmetic operations required for the same al- DFT of length ± factors that simplify as before such as 5.1 Let is again some optimizations and special cases: the few twiddle T (N ) = 5N log2 N − O(N ) and O(1) takes into account a bounded number of extra