Jung," SC IEEE, Member,
advertisement

60
E E E TRANSACTIONS ON BIOMEDI
Jung," Member, IEEE, SC
Changes in the electroen-
nous, accurate, noninvasive, and near real-time
operator's global level of alertness is feasible
ures recorded from as few as two central scalp
on monitoring tasks
periods from two sec0
or complete unrespons
formance and the EEG pow
by using an event rate high
scale changes in perform
I. INTRODUCTION
Y studies of vigilance during the past half century
e shown that retaining a constant level of alertness
or impossible for operators of automatized systems
who perform monotonous but attention-demanding monitoring
tasks [ 11. Alertness deficits are a particular problem i
the-clock operations, and can lead to severe consequences for
ship, air, truck, rail, or plant operators, air traffic c
security officers, and workers in many other occ
most such work environments, continuous meas
ator performance are not available. Accurate an
real-time monitoring of operator alertness would thus be highly
desirable in a variety of operational environments, particularly
if this measure could be shown to predict chan
performance capacity.
It has also been known for more than half
signal changes related to alertness, arousal, sl
tion are present in electroencephalographic (
arousal monitoring tasks), d
changes in operator performance is not a
an EEG-based
pe*Omance
mo
assessment.
for many Operators, gro
accuratelY
Predict changes in
linear regression models to
Manuscnpt received April 21, 1995, revised A
S Makeig was supported by the Department of the Navy, Naval Research and
Development Command under Grant ONR.WR.
J Sejnowsh was supported by the Department of the
indicates corresponding author.
than linear models 1131, and
between EEG spectra and p
information to develop, for each op
Publisher Item Identifier S 0018-9294(97)00606-X
0018-9294/97$10 00 0 1997 E E E
61
JUNG et a1 ESTIMATING ALERTNESS FROM THE EEG POWER SPECTRUM
individual differences in EEG dynamics accompanying loss
of alertness. We then compare the accuracy of our estimates
to those obtained from linear regression models. Finally, we
present a benchmark study in which the accuracy of our
alertness estimates compares favorably to non-EEG-based a
priori models, and show that our estimation results approach
a lower bound for error rate estimation.
11. METHODS
A. Subjects
A total of 15 subjects (ages from 18 to 34 years) participated
in a dual-task simulation of auditory and visual sonar target
detection. All had passed standard Navy hearing tests or
reported having normal hearing. Each subject participated in
three or more simulated work sessions each lasting 28 min. We
selected for intensive analysis data from all subjects having at
least two sessions containing a minimum of 25 lapses. For
each of these ten subjects, we selected the two sessions with
the highest number of lapses for training and testing, and
reserved the session with the third highest number of lapses
for neural network training validation. The 20 selected test
sessions included a mean of 68 lapses (range: 27-160).
B. Stimuli
auditory or visual response buttons each time they detected an
auditory or visual target respectively.
D. Data Collection
EEG data were recorded at a sampling rate of 312.5 Hz
from two midline sites, one central (Cz) and the other midway
between parietal and occipital sites (Pz/Oz), using 10-mm
gold-plated electrodes referenced to the right earlobe. EEG
data were first preprocessed using a simple out-of-bounds
test (with a f 5 0 UV threshold) to reject epochs that were
grossly contaminated by muscle and/or eye-movement artifacts. Moving-averaged spectral analysis of the EEG data was
then accomplished using a 256-point Hanning-window with
50% overlap. Windowed 256-point epochs were extended to
512 points by zero-padding. Median filtering using a moving 5-s window was used to further minimize the presence
of artifacts in the EEG records. The EEG power spectrum
time series for each session consisted of 1024 EEG power
estimates at 81 frequencies (from 0.61 to 49.41 Hz) at 1.6384s (512-point per epoch) time intervals. For spectral correlation
and error rate estimation, data from each session were first
converted to a logarithmic scale and then normalized at each
frequency separately by subtracting the session mean and
dividing the result by half the difference between the 25th
and 75th percentiles of the log power distribution during the
session. Logarithmic scaling linearizes the expected multiplicative effects of subcortical systems involved in wake-sleep
regulation of EEG amplitudes [15].
Auditory signals, including background noise, tone pips,
and noise burst targets, were synthesized using a Concurrent
work station which was also used to record the EEG. In
a continuous 63-dB white-noise background, task-irrelevant
auditory tones at two frequencies (568 Hz and 1098 Hz) were E. Alertness Measure
Auditory targets were classified as Hits or Lapses depending
presented in random order at 72 dB (normal hearing level) with
stimulus onset asynchroniesbetween 2-4 s. These signals were on whether or not the subject pressed the auditory response
introduced to assess the information available in event-related button within 120 ms to 3000 ms of target onset. To quantify
potentials [13], and are not reported in this study. In half of the level of alertness, auditory responses were converted into
the inter-tone intervals, target noise bursts were presented at 6 local error rate, defined as the fraction of targets not detected
dB above their detection threshold. The mean target rate was by the subject (i.e., lapses) within a moving time window.
thus 10 per minute. Positions of target onsets in the inter-tone Each error rate time series consisted of 1024 points at 1.6384intervals were pseudorandom, and did not occur within 400 s intervals, and was computed using a causal 93.4 s (57 epoch)
exponential window whose gain varied from 1.O at the leading
ms of the nearest probe tone.
Visual stimuli were produced by a 386 PC with a VGA color edge to 0.1 at the trailing edge. Error rate and EEG data from
display (13-cm wide by 9-cm high). The display background the first 93.4 s of each run were not used in the analysis. For
was composed of l-mm grey scale squares resembling visual each window position, the sum of window values at moments
television noise (“snow”). Visual targets were introduced at a of presentation of undetected (lapse) targets was divided by
mean rate of l/min, and were not correlated with auditory tar- the sum of window values at moments of presentation of
gets. Visual targets consisted of 20 consecutive white squares all targets. The window was moved through the session in
forming a vertical line. The display was updated twice each 1.6-s steps, converting the irregularly-sampled, discontinuous
second by adding a new line of squares to the top of the screen performance record into a regularly-sampled, continuous error
and scrolling the existing display down one line, creating a rate measure with range [O, 11.
slowly descending “waterfall” effect.
F. Numerical Methods
C. Procedure
Numerical results in this study were computed on a SiliEach subject participated in three or more 28-min experi- con Graphics Indy computer (R4OOOPC CPU). The stability
mental sessions on separate days. Subjects sat in a chair with of minute-scale fluctuations in performance concurrent with
their right index and middle fingers resting on visual and changes in the EEG power spectrum over time and subauditory target response buttons, respectively. The subjects jects was analyzed using a cluster analysis program, UNIX
viewed the CRT waterfall display while receiving auditory pcdcluster, based on the centroid method [161. Multivariate
stimulation bilaterally through headphones, and pressed the linear regression and analysis of variance were performed
62
IEEE TRANSACTIONS ON BIOMEDICAL ENG
anipulation an data-analysis
programs [17].
Analysis using feedforward multilayer perceptrons was per-
inputs, which is then passed through
squashing function. In this study, the
of the network were adjusted using the
ize sum-squared error be-
data. Training was terminated when estimation performance
ed to improve. Upon completion of the
y took several minutes of CPU time, the
network was tested on the last 967 data points from a separate
F1g 1. Fluctuations in error rate
one test session Note the correlatio
square (rms) estimation errors during each run (excluding the
first 93.4 s).
LATIONSHIP
BETWEENTHE!
og EEG spectrum at the
figure, the EEG log spect” has been
ting the mean log spectrum d u n g the
and performance in two
and 14.7 Hz. In both
exceeds 75%. Third,
appreciably, relative
e relationship of minute-scale fluctuations
local error ra
spectrum at each time point and the mean “alert” spectrum
ects. Depth indexes local
visual task perform
auditory task perfor
63
JUNG et al.. ESTIMATING ALERTNESS FROM THE EEG POWER SPECTRUM
cz
-
4
4
- - Power near 14 Hz
3
.92
E1
4
c
Y
$0
0
OO
20
(a)
OO
(C)
80
100
80
100
(b)
-
Frequency ( H ~ )
40
60
Error Rate (%)
- Power near 14 Hz
20
40
60
Error Rate (%)
(d)
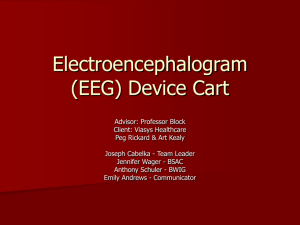
Fig. 2. Grand mean error-sorted spectra showing mean group differences between drowsy and alert log spectra for each local error rate level (indexing
levels of drowsiness). Grand mean of 20 sessions from ten subjects. Error rate smoothing in this and following figures: causal 93-s exponential window:
(a) at the vertex (Cz), spectral changes are largest near 4 Hz and 14 Hz at high error rates and (c) at PUOz (midway between midline parietal and
occipital sites), power increases near 4 Hz beginning at moderate error rates, and decreases slightly near 10 Hz. (b) and (d) show cross secbons of
power change with error rate at those frequencies).
As suggested by the peaks in the error-sorted spectral
surfaces
(Fig. 2), the mean correlation between performance
We then measured correlations between changes in the
and
EEG
power is positive at both sites near 4 Hz, and at
EEG log power spectrum and local error rate by computing
Cz
another
positive correlation occurs near 14 Hz. At high
the correlations between the two time series at each EEG
error
rates,
a
modest negative correlation also appears near
frequency. We refer to the results as forming a correlation
spectrum. Since most spectral variance in the error rate time 10 Hz. In an earlier study using the same auditory detection
series for this task occurs at cycle lengths longer than 4 task, where subjects kept their eyes closed [SI, the spectral
minutes [91, we smoothed the EEG power and error rate time correlation between performance and EEG power contained a
series using a noncausal 93.4-s bell-shaped moving-average prominent negative correlation in the alpha frequency range.
filter to eliminate variance at cycle lengths shorter than 1-2 This negative peak was not found in the present experimin. For each EEG site and frequency, we then computed ments in which subjects performed with eyes open. Fig. 3(a)
spectral correlations for each session separately and averaged gives the impression that two frequency bands dominate
the results across all 20 sessions. Results for 40 frequencies the relationship between performance and the EEG power
spectrum.
between 0.61 Hz and 24.4 Hz are shown in Fig. 3(a).
B. Spectral Correlation
Frequency (Hz)
0
5
10
15
20
Frequency (Hz)
25
Frequency (Hz)
(cf. Fig. l), (d) correlation spectra from the least similar within-subject session pair (Subject D14).
Next, we compared correlation spectra for individual sessions to examine the stability of this relationship over time and
subjects. Figs. 3(b), (c), and (d) show that correlation spectra
subjects are consistent between sessions, but differ
subjects. Subject D3 shows a positive correlation
D2 does not. Cluster analysis of spectral correlations between
pair of sessions mo
separated by the cluster analysis
ve correlation between 1 Hz and
Fig. 3(d)). Thus, changes in the
loss of alertness appear to be
spectrum at several frequencies.
JUNG et a1 ESTIMATING ALERTNESS FROM THE EEG POWER SPECTRUM
individual changes in alertness and performance. Rather information about alertness may be distributed over the entire
EEG spectrum. In this study, we assess the potential accuracy
of error rate estimation using full spectrum EEG. First, we
describe a lower bound for estimation error and two a priori
error rate models. Next, we explore the benefits of estimating
error rate from the full EEG spectrum at two scalp sites using
neural networks. Finally, we compare the results of EEG-based
error rate estimation to the lower bound and a priori models.
65
Mean local error rate trend
i
0‘5
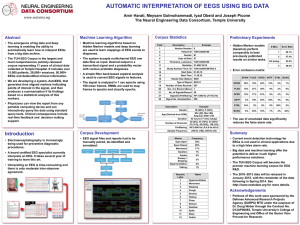
A. Non-EEG-Based Estimation
1) Estimation Error in a priori Models: The best available
a priori estimate of local error rate in our task is the group
mean local error rate at each instant. The estimate is based on
the assumption that for each subject and session the tendency
of failing to respond to targets is the same. We computed this
“group trend” by averaging performance results of a total of
98 similar 28-minute auditory detection sessions, including the
30 sessions used in the present analysis. The results (Fig. 5 )
follows a well-known trend of vigilance data: Initial nearperfect performance begins to decay after about one minute.
Thereafter, error rate rises steadily until 10 min into the task,
after which it remains more or less stable near 30%. Thus, this
group trend should give a best available a priori estimate of
alertness decrements. Root mean square errors between the
group trend and observed error rate time courses in these
Jxperiments thus provide a conservative benchmark for the
accuracy of EEG-based alertness estimation. If EEG-based
estimation can perform better than this a priori estimate, its
further development would appear justified. Note that in more
complex real-world work environments in which EEG-based
monitoring would be of most value, detailed knowledge of the
time course of error rates would not normally be available.
A second, less conservative standard can be derived from a
model which assumes that operators experience no lapses in
alertness at all (a “right stuff’ model), ignoring the tendency
for vigilance decrements in stimulus-poorenvironments. Many
current system designs may incorporate this model tacitly if
they assume that their human operators will be able to respond
at any time to new events or conditions. The prediction error
of this “right stuff’ model, the actual rms error rate for each
session, thus provides a second standard against which to
compare the performance of EEG-based models.
2) Expected Minimum for Estimation Error: Our performance analysis is based on the assumption that the timevarying error-rate measure indexes more or less continuous
changes in subjects’ levels of alertness. As a probability
measure, error rate cannot itself predict individual responses
to targets, even if it is known precisely. Since target stimuli
in our experiments were delivered at semi-random intervals
at a limited sampling rate, the resulting sparse sampling
and sampling jitter in the performance records produced
uncertainty in error rate estimates computed from those
records. In this sense, a local error rate time series cannot
be recaptured perfectly from a single performance record.
Therefore, any measure partially or wholly correlated with
performance, including the EEG spectrum, cannot to be
o OO
5
10
. 15
20
25
l30
Time (min)
Fig. 5. Group mean local error rate trend for each time-on-task, averaged
across 98 sessions. This group mean trend gives a conservative a priori
standard of comparison for EEG-based estimation errors in the auditory
detecuon task.
expected to generate an error-rate estimate with more accuracy
sible in computing local error rate from the
ws us to compute an expected lower
r-rate estimation. For each session, we
first generated 50 surrogate data sessions, series of simulated
hits and lapses based on target delivery times generated by
the same algorithm that produced the experimental sessions,
and counted each target depending on a random number
weighted by the observed error rate time series (considered
as an experimentally-derived time-varying probability of a
performance lapse at each target delivery time). Next, we
low-pass filtered the resulting surrogate performance records
using the same smoothing window used to derive the actual
error-rate time series. Finally, we computed the rms difference
between the resulting surrogate error rate series and the
original error rate series for the session. By this method,
50 surrogate error rate functions were created and evaluated
for each of the 20 experimental sessions. Fig. 6 shows the
error rate time series from one session (top panel) and 20
surrogate error rate time series generated from the non-EEGbased model.
B. EEG-Based Error Rate Estimation
Multiple linear regression models and feedforward multilayer networks were trained to estimate the behavioral errorrate time series from information available in the EEG power
spectrum. Except where indicated, principal component analysis (PCA) was applied to the full EEG log spectrum to extract
the directions of largest variance for each session used to
train the network. Projections of the EEG log spectral data
on the subspace formed by the eigenvectors corresponding to
the largest eigenvalues were then used as input to train various
models to estimate the time course of the local error rate. Each
model was trained on one session and tested on a separate test
session for each of the ten subjects. PCA eigenvectors derived
IEEE TRANSACTIONS ON BIOME
66
11
I
I
I
I
I
1
Observed error rate time series
0.8
COMPARISON
OF MEANESTIMATION
ERRORS
I
MULTIPLE
LINEARREGRESSION
A
FROM Two EEG CHANNELS
AV
REGRESSION MODEL
FOR E
2) Advantage of Using the F
0
5
10
15
20
25
30
cused on a small number
ori, rather than the full-s
Time (min)
trum, we compared
linear regression on
at five frequencies previous1
spectra resulted in lo
training-testing pairs
input, rather than a subset
3) Advanfaage of Usi
vestigation using a si
gression models to the
channels to estimate ale
the results of using log
testing pairs, as estimated
log spectra (0.6-24.4 Hz),
channels than using either
or Pz/Oz (F(1,lO)= 8.0
further comparisons we
same way. Mean and standard deviation
rates were the
two-layer (no hidden layer)
network varied from
the time course of e
for each of the 20
of neural network estima
introduced into the model. This result confirms a recent finding
221 who showed significant correlations
eigenvectors of EEG spectral variance
same detection task. In further model
ur principal components as
use three-layer net
JUNG et al.: ESTIMATING ALERTNESS FROM THE EEG POWER SPECTRUM
61
TABLE I1
COMPARISON OF MEANESTIMATION
ERRORSIN ERROR-RATE
ESTIMATES
USING MULTIPLE
LINEARREGRESSION
AND NEURAL
NETWORKS
FOR
EACHSUBJECT, THE FULLEEG SPECTRUM FROM ONE SESSION, PREPROCESSED USING PRINCIPAL COMPONENT ANALYSIS (PCA), WAS USED
TO TRAINTHE MODELS
TO ESTIMATE
THE TIMECOURSE OF ERRORRATEIN A SECOND SESSION FROM THE SAME SUBJECT THETABLE
SHOWS THE MEANSAND STANDARD DEVIATIONS
OF THE (RMS) ESTIMATION
ERRORFOR 20 SESSIONS FROM TEN SUBJECTS
Measure
Linear Regression
rms est. error
std. deviation
1.2 I
I
Estimate
0.163
Neural Network
(no hidden layer)
0.158
0.0452
0.0429
Neural Network
(1 hidden layer with 3 units)
0.156
1
0.0475
Subject D18
I
I
I
I
I
1
Observed error rate Neural net estimate rms=0.08) ---Linear reg. estimate [rms=o.i 1)
c
0.8
I
0.6
-
0.5
-
0.4
-
EEG-based neural net estimate
Linear regression estimate
Group trend upper bound
Session rms error rate
+-t
.-
0.3 0.4
0.2
.n
0
0.1
o.2
5
10
15
Time(min)
20
25
i
30
(a)
Subject D3
Observed error rate Neural net estimate rms=0.137 ---Linear reg. estimate [rms=0.142{
0.6
-
EEG-based neural net estimate +Lower bound (+/- 2 s.d.) ---Session rms error rate
0.8
,/
._...___.._......
0.6
0.4
0.2
0
0
0
5
10
15
Time(min)
20
25
30
0
'9
5
15
20
Experiment #
(b)
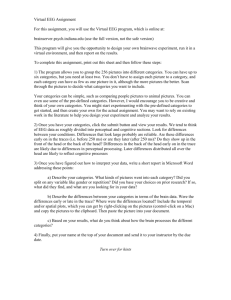
Fig. 7. Error-rate estimates for sessions from two subjects, based on
three-layer feedforward neural network (dashed lines) and [O, 11-limited
linear regression (dotted lines) processing of PCA-reduced EEG log spectra
at two scalp sites, overplotted against actual local error rate time series for
the sessions (solid lines). For both sessions, the nonlinear estimator gives the
lower rms estimation error. Note differences at the end of (a) and beginning
of (b).
Fig. 7 plots actual and estimated error rate time series for
single test sessions from the two typical subjects. The errorrate estimates were obtained using both linear regression and
three-layer neural networks with three hidden units applied
to two-channel EEG log power spectra projected on the four
principal components. As can be seen in the figure, in both
Fig. 8. Relative accuracy of EEG-based versus best a priori local error-rate
estimators: (a) estimation errors produced by EEG-based linear-regression and
three-layer neural network models (see key) compared to errors produced by
optimum (observed group trend) and unrealistic (zero-error) a priori models.
Neural network models give a lower estimation error than linear-regression
models in 16 of 20 cases (F(1,9) = 6.37; p = 0.03), and a lower estimahon
error than the optimum e priori model; in 18 of 20 cases and @) EEG-based
rms estimation error compared to an expected lower bound for estimation
error (mean f 2 s. d.) computed for each session using a Monte Carlo method
(see Fig. 6).
sessions the neural networks estimate changes in local error
rate occurring throughout the sessions reasonably well and
with less estimation error than the linear regression estimates.
5) P e ~ o r m a n c eof EEG-Based Alertness Estimates: Finally,
we compared the accuracy of our best EEG-based estimates to
IEEE TFL4NSACTIONS ON BIOMED
68
riori standards and the ’lower-bound near real-time knowledge of
. 8 displays results for each session,
of total rms error. The top panel
shows that the estimation errors produced by both the more
realistic (“group trend”) and unrealistic (“right stuff ’) a priori
models were larger than those produced by the EEG-based
linear and nonlinear (three-layer neural network) models.
EEG-based nonlinear estimators gave lower rms estimation changes in EEG pow
error than the conservative “group trend” estimates for 18 of a monotonic relations
the 20 training-testing pairs, demonstrating that suitable EEGbased algorithms are capable of giving more accurate estimates
of performance than even optimum a priori estimators. EEG- variable between subje
based estimators wer
rably more accurate than
the predictions of the
ght stuff’ model.
The bottom panel of Fig. 8 shows the estimation errors neural networks. Our results show that ac
expected from sampling error alone (mean& 2 s.d.). As can be
seen, rms estimation error is within two standard deviations of spectral data appears reali
the expected lower bound for 13 of the 20 EEG-based session
estimates. On average, EEG-based estimation errors were 1.2
above the lower bound. These results
ous EEG-based error-rate estimation using
data channels is feasible, and can give
more accurate information about minute-to-minute changes in
operator alertness than
the best a priori models.
for the same ses
[l] N. Mackworth, “The br
arch,” Q J Exp Psy
V. DISCUSSION
derived from EEG data collected at two (central and posterior
The computational load imposed by ow
is is well within the capabilities of modern
ing hardware to perform in real time using
one or more channels of EEG data. Once an estimator has been
developed for each operator, based on limited pilot testing, the
only spontaneous EEG signals from the operator,
require further collection or analysis of operator
performance. Also, unlike proposed methods based on event, our method avoids introducing
or secondary-task stimuli into the
enient electrode
sensory transmiss
nments in which
JUNG et aL: ESTIMATING ALERTNESS FROM THE EEG POWER SPECTRUM
[16] P. Sneath and R Sokal, Numerical Taxonomy The Principles and
Practice of Numerical Classzjication San Francisco, CA Freeman,
1973
[ 171 G Perlman, “UNIWSTAT Data-analysis programs,” Behavior Res
Methods and Instrum, no 1, 1984
I181 D van Camp, User’s Guide for the Xerion Neural Network Simulator,
Dept Computer Science, Univ of Toronto, 1993
[19] D E Rumelhart, G E Hiton, and R J Williams, “Learning internal representation by error propagation,” in Rummelhardt Parallel
Distributed Processing Cambndge, MA, MIT Press, 1986, ch 8
[20] N Morgan and H Bourlard, “Generalization and parameter estimation
in feedforward nets Some expenments,’’ in Advances in Neural Information Processing Systems, D S Touretzky, E d , vol 2 San Mateo,
CA. Morgan Kaufmann, 1990, pp 630-637
[21] A Papoulis, “Minimum bias windows for high resolution spectral
estimation,” ZEEE Trans Inform Theory, vol IT-19, pp 9-12, 1973
[22] S Makeig and T Jung, “Alertness is a prmcipal component of vmance
in the EEG spectrum,” NeuroRep , vol 7, no 1, pp 213-216, 1995
[231 S Makeig, F Elliott, M. Inlow, and D Kobus, “Lapses m alertness Bran-evoked responses to task-irrelevant auditory probes,” Naval
Health Research Center, San Diego, CA, Tech Rep 90-39, 1992
[241 S Hillyard and P Johnston, “Event-related brain potentials as predictors
of target detection performance in a moving waterfall display simulatmg
passive broad-band sonar monitoring,” Naval Health Research Center,
San Diego, CA, Tech Rep 93-33, 1994
[25] J Isreal, C Wickens, G Chesney, and E Donchm, “The event-related
brain potential as an index of display-monitoring workload,” Human
Factors, vol 22, no n2, pp 211-224, 1980
Tzyy-Ping Jung (S’91-M’92) received the B.S. degree in electronics engineering from National Chiao
Tung University, Tawan, in 1984, and received the
M S and Ph D degrees in electncal engineermg
from The Ohio State University, Columbus, in 1989
and 1993, respectively.
He is currently a Research Associate at the National Research Council of the Nahonal Academy
of Sciences. He is also a Research Associate with
the Computabonal Neurobiology Laboratory at The
Salk Institute in San Diego, CA His research interests are in the areas of speech production and perception, signal processing,
artificial neural networks, time-frequency analysis of human EEG, and the
development of neural human-system interfaces.
Scott Makeig received the B A from the Univ
of California, Berkeley, in 1972, completed the
master’s degree program in music theory from
the University of South Carolina, Columbia,
in 1979, and received the interdisplinary Ph.D
in music/psychobiology from the University of
California, San Diego, in 1982
He is a Psychobiologist specializing in applying
time-frequency and neural network analysis to
human EEG and N R I time-series data He is
on the faculty of the Department of Neurosciences
at UCSD, and for several years has studied the EEG correlates of alertness
lapses for the Office of Naval Research as a Research Psychologist at the
Naval Health Research Center, San Diego, CA.
69
Magnus Stensmo received the M.Sc. in computer
science and engineering in 1988 and the Ph.D. in
computer science in 1995 from the Royal Institute
of Technology in Stockholm, Sweden. Thc present
work was performed while he was a visiting graduate a student at the Computational Neurobiolog Lab
at the Salk Institute, San Diego, CA. between 1992
and 1995
He is now a Postdoctoral Research Associate
with the Computer Science Division at University
of California, Berkeley.
Terrence J. Sejnowski (M’83-SM’91) received the
B.S. in physics from the Case-Western Reserve
University, Cleveland, OH, the M.A. in physics
from Pnnceton University, Princeton, NJ, and the
Ph.D. in physics from Princeton University in 1978.
From 1978 to 1979 Dr. Sejnowski was a Postdoctoral Fellow in the Department of Biology at
Princeton University and from 1979-1982 he was a
Postdoctoral Fellow in the Department of Neurobiology at Harvard Medical School. In 1982 he joined
the Faculty of the Department of Biophysics at the
Johns Hopkins University, Baltimore, MD, where he achieved the rank of
Professor before moving to San Diego, CA, in 1988. He is an Investigator
with the Howard Hughes Medical Institute and a Professor at The Salk Institute
for Biological Studies, San Diego, CA, where he directs the Computational
Neurobiology Laboratory. He is also Professor of Biology and Adjunct
Professor in the Departments of Physics, Neuroscience, Psychology, Cognitive
Science, Electrical and Computer Engineermg, and Computer Science and
Engineering at the University of California, San Diego, where he is Director
of the Instltute for Neural Computation and Director of the McDonnell-Pew
Center for Cognitive Neuroscience.
Dr. Sejnowslu received a Presidential Young Investigator Award in 1984.
He was a Wiersma Visiting Professor of Neurobiology at the California
Inshtute of Technology in 1987. In 1988 he founded the journal Neural
Computation, published by the MIT Press. He delivered the 1991 Messenger
Lectures at Cornell University. With Patncia Churchland, he wrote The
ComputationalBrain, (Cambridge, MA MIT Press, 1992). He was a Sherman
Fairchild Distinguished Scholar at the California InsfitUte of Technology in
1993-1994 and continues as a Visiting Professor. The long-range goal Dr.
Sejnowski’s research is to build linkmg principles from bram to behavior
using computational models This goal is being pursued with a combination
of theoretical and experimental approaches at several levels of investigation
ranging from the biophysical level to the systems level. Hippocampal and
cortical slice preparations are being used to explore the propertles of single
neurons. Network models based on these data are used to study how
populations of neurons code and process information. These studles may
lead to new insights into how sensory informahon is represented in the
visual cortex, bow memory representations are formed, and how sensorimotor
transformations are organized.