PHY4222/Spring 2008: CLASSICAL MECHANICS II HOMEWORK ASSIGNMENT #9: Solutions
advertisement

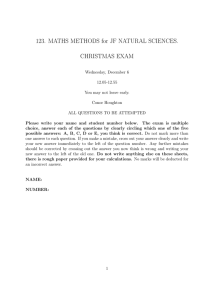
PHY4222/Spring 2008: CLASSICAL MECHANICS II HOMEWORK ASSIGNMENT #9: Solutions due by 12:50 p.m. Wed 04/02 Instructor: D. L. Maslov maslov@phys.ufl.edu 392-0513 Rm. 2114 Please help your instructor by doing your work neatly. Every (algebraic) final result must be supplemented by a check of units. Without such a check, no more than 75% of the credit will be given even for an otherwise correct solution. 1. T&M Problem 11-34 [25 points] Solution Euler equation I1 ω̇1 − (I2 − I3 ) ω2 ω3 = N1 , where N1 = −bω1 . Because the object is symmetric, I2 = I3 , and I1 ω̇1 = −bω1 ω1 (t) = ω1 (0) exp (−bt/I1 ) . 2. A cone is rolling on a plane without slipping, as shown in Fig. 1. The height of the cone is h, the vertical angle is 2α, and the mass is m. Find the kinetic energy of the cone in terms of θ̇. [40 points] Hints: Consider the motion of the c.o.m. Identify the radius of the circle it is making. Relate the linear velocity of the c.o.m. to θ̇. Notice that the cone’s motion can be viewed as rotation about an instantaneous axis which is the line of contact between the cone and the plane. Use the no-slipping condition to relate the linear velocity of the c.o.m. to angular velocity of this rotation, Ω. Now you can relate Ω to θ̇. The rest is easy: T = 12 M v02 + 12 I1 Ω21 + 21 I2 Ω22 + 12 I3 Ω23 . The components of the inertia tensor were calculated in H8. Solution The center of mass is located at distance a = 3h/4 from the vertex of the cone, where h is the height of the cone. The projection of the c.o.m. on the line of contact between the cone and the plane is at a cos α from the vertex. This projection moves in a circle of radius a cos α when the cone rolls. Therefore, the linear velocity of the c.o.m is v0 = a cos αθ̇. On the other hand, the can can be viewed as executing a rotational motion about the instantenous rotation axis that coincides with the line of contact. The angular velocity Ω is along the line of contact. The no-slipping condition reads v0 = Ωa sin α = a cos αθ̇ → Ω = cot αθ̇. One of the principal axes of the cone (x3 ) is along its symmetry line. Another one (x1 ) can be chosen in the plane formed by the symmetry line and the line of contact, and the third one (x2 ) can be chosen to be perpendicular both to x1 and x3 . The projections of the angular velocity on the principal axes are Ω1 = Ω sin α, Ω2 = 0, Ω3 = Ω cos α. The total kinetic energy of the cone 1 1 1 1 M v02 + I1 Ω21 + I2 Ω22 + I3 Ω23 2 2 2 2 1 1 1 2 2 2 2 = M a cos αθ̇ + I1 sin αΩ2 + I3 cos2 αΩ2 2 2 2 T = 2 1 1 1 cos4 α M a2 cos2 αθ̇2 + I1 cos2 αθ̇2 + I3 2 θ̇2 2 2 2 sin α ¸ · 1 I I3 cos4 α 1 2 2 2 2 = M a θ̇ cos α + cos α + , 2 M a2 M a2 sin2 α = where M is the mass of the cone. Using the results of H8 for the tensor of inertia of a cone, µ ¶ 3 1 2 2 I1 = I2 = M R + h 20 4 3 I3 = M R2 10 and R = h tan α, we obtain µ ¶ µ ¶ I1 3 h2 1 4 1 2 2 = tan α + = tan α + M a2 20 a2 4 15 4 I3 8 tan2 α. = M a2 15 The expression for T reduces to · µ ¶ ¸ 9 4 1 8 M a2 θ́2 cos2 α + tan2 α + cos2 α + cos2 α 32 15 4 15 £ ¤ 3 M a2 θ́2 1 + 5 cos2 α . = 40 T = 3. Consider a torque-free symmetric top (I1 = I2 ) . Let x3 be along the symmetry axis of the top and angular momentum L be along the X3 axis of the fixed system. The angle between ω and x3 is α. Suppose that ω and L are initially in the x2 − x3 plane. What is the angular velocity of the symmetry axis about L in terms of ω, I1 , I3 , and α? [35 points] Bonus: Thornton & Marion, Problem 11-24. [30 points]For notations, see the plot in Fig. 2. Initially, L1 = 0 = I1 ω1 = 0 L2 = L sin θ = I1 ω2 = I1 ω sin α L3 = L cos θ = I3 ω3 = I3 ω cos α Taking the ratio of the second two equations, we find tan θ = I1 tan α I3 From Eulerian angles, ω3 = φ̇ cos θ + ψ̇ = ω cos α. The angular velocity of the symmetry axis about L is φ̇ ³ ´ φ̇ = ω cos α − ψ̇ / cos θ From Euler’s equations (see (11.131 of T&M) ψ̇ = − I3 − I1 I3 − I1 ω3 = − ω cos α. I1 I1 Substuting this result into the equation for φ̇, we get φ̇ = I3 cos α ω . I1 cos θ (1) 3 2α θ FIG. 1: Problem 1 Using result for tan θ in Eq.(1) and a trigonometric identity 1/ cos θ = to q I12 sin2 α + I32 cos2 α φ̇ = ω . I1 √ 1 + tan2 θ, we reduce the result for φ̇ Bonus: Thornton & Marion, Problem 11-24. [30 points] Solution √ 2 a) See Fig. 3. The area of the triangle of side a is A = a2 3/4 and the mass √ density √ of the plate √ is ρ = M/A . The distance between the c.o.m. (O) and the pivot point (O’) is ` = a 3/2 − a 3/3 = a 3/6. The inertia about point O’ Z a/2 Z √3(a/2−x1 ) ¡ ¢ I 0 = 2ρ dx1 dx2 x21 + x22 0 Z = 2ρ · a/2 dx1 0 0 x21 √ ´3 ¸ 1 ³√ 3 (a/2 − x1 ) + 3 (a/2 − x1 ) . 3 In the second term, relabel the integration variable x1 → a/2 − x1 ; then · ¸ √ Z a/2 √ 1 ³√ ´3 3 3 4 1 0 2 I = 2ρ dx1 x1 3 (a/2 − x1 ) + 3 x1 = ρa = M a2 . 3 14 6 0 From the general formula for the frequency of a physical pendulum (Example 11.2 in T&M, p. 413) √ M ga 3/6 √ g M g` 2 = = 3 ω = I0 M a2 /6 a q√ ω = 3g/a. b) Similar analysis gives s √ 4 3g ω= . 5 a 4 X_3,L ω x_3 α x_2 θ FIG. 2: Problem 3 x_2 x_2=sqrt(3)(a/2-x_1) Ο x_1 O’ FIG. 3: Bonus 5 2α θ FIG. 4: Problem 2