Lecture Notes for Chapter 34: Images

Lecture Notes for Chapter 34: Images
Disclaimer: These notes are not meant to replace the textbook. Please report any inaccuracies to the professor.
1. Spherical Reflecting Surfaces
• Bad News: This subject is very heavy in notation!
• Good News: There aren’t any new principles. Everything follows from “angle of incidence equals angle of reflection” and we will provide simple rules to avoid even having to use that!
Types of Mirrors
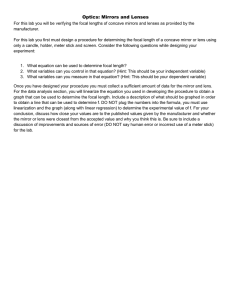
Figure 1 shows the three types of mirrors we will consider. All of them are segments of spheres centered on a horizontal axis. There is an object ( O ) being reflected and a human (on the same side) observing the reflection. The terms “concave” and convex” are from the perspective of the object:
• A concave mirror caves in on the object; whereas
• A convex mirror flexes away from the object.
Each mirror has a radius of curvature r (which is infinite for the plane mirror) and a focal length f = 1
2 r . By convention, distances are measured, along the central axis, as positive from the mirror in the direction of the object and negative away from the object. Hence the radius of curvature and the focal length are positive for concave mirrors and negative for convex mirrors.
The Various Lengths
Six lengths are relevant for mirrors:
• The radius of curvature r , which is positive for concave mirrors and negative for convex ones;
• The focal length f , which is positive for concave mirrors and negative for convex ones;
• The object distance p , which is always positive;
1
O
Flat Mirror Concave Mirror
O
C F
Convex Mirror
O
F C
Figure 1: The three types of mirrors. In each case the human (the filthy, diseased animal in green) stands to the left of the mirror, as does the object
( O ) being reflected. The image can form either on the same side as the human (in which case it is called a REAL image) or on the side opposite from the human (in which case it is called a VIRTUAL image). The center of each spherical mirror is C and its focal point is F . The radius of curvature r and focus f of the flat mirror are infinite; the concave mirror has r = 2 f > 0; and the convex mirror has r = 2 f < 0.
• The object height h , which is always positive;
• The image distance i , which is positive for REAL images (on the same side as the human) and negative for VIRTUAL images (on the opposite side as the human); and
• The image height h ′ , which is always positive, even if the image is inverted.
The Focal Point
The key property of the focal point is that any light ray which approaches the mirror traveling parallel to the central axis is reflected back along a line passing through the focal point. Note that the time reversal invariance of electrodynamics therefore implies that any light ray passing through the focal point is reflected back along a line parallel to the central axis.
Types of Images
We distinguish images depending upon whether they form on the same
2
Concave Mirror Convex Mirror
C F F C
Figure 2: Incident light rays which are parallel to the central axis (red) reflect back along a line through the focal point. Light rays which are incident along a line through the focal point (blue) reflect back parallel to the central axis.
For the case of the convex mirror note that neither of the rays actually reaches the focal point, but they nevertheless move along lines which pass through the focal point.
side of the human or the opposite side:
• REAL images form on the same side of the mirror as the human. They have i > 0 and they are INVERTED with respect to the object. The magnification for a REAL image is m = − h ′ /h .
• VIRTUAL images seem (to the stupid human) as if they emerge from the opposite side of the mirror. They have i < 0 and they are NOT
INVERTED with respect to the object. The magnification for a VIR-
TUAL image is m = + h ′ /h .
Figure 3 shows examples of the two types of images.
How to find the image
There is a geometrical method and and algebraic method. The geometrical method is to follow any two incident light rays which pass through the top of the object. Three rays which are easy to follow are:
• One which is incident parallel to the central axis and hence reflects back through a line passing through the focal point;
• One which is incident along a line which passes through the focal point, and hence is reflected back parallel to the central axis; and
3
Concave Mirror h
O
I h ′
C F h
O
Convex Mirror h ′
I
F C
Figure 3: The concave mirror on the left forms a REAL image which is
INVERTED when the object lies outside the focal point. The magnification in this case is m = − h ′ /h . Note that the image distance i is positive.
The convex mirror on the right forms a VIRTUAL image which is NOT IN-
VERTED where ever the object is located. The magnification in this case is m = + h ′ /h . Note that the image distance i is negative.
Mirror
Type
Object
Location
Image
Location
Image
Type
Image
Orientation sgn(f) sgn(r)
Plane Anywhere Opposite Virtual Not Inverted NA
Concave Inside F Opposite Virtual Not Inverted +
Concave Outside F Same Real Inverted +
Convex Anywhere Opposite Virtual Not Inverted − sgn(m)
+
+
−
+
Table 1: Table 34-1 with the entries filled in.
• One which reflects off the mirror at the central axis, and hence reflects back symmetrically.
Figure 4 illustrates the technique. Using these techniques we can fill out the entries in the text’s Table 34-1.
which you should include in your formula sheet.
Analyzing Mirrors the Easy Way
There is unfortunately no way to avoid the complicated notation. However, two simple formulae allow us to avoid the complicated graphical constructions. The first of these relations allows us to determine the image
4
Concave Mirror
O
C F
O
Convex Mirror
I
F C
I
Figure 4: The geometrical technique for finding the image is to follow any two incident rays which pass through the top of the object. In each case the red ray is incident parallel to the central axis, so it reflects back along a line that passes through the focal point. The blue ray is incident along a line which passes through the focal point, so it reflects back parallel to the central axis. And the green ray reflects from the mirror at the central axis, so the reflected ray is symmetric about the central axis.
distance i in terms of the object distance p and the focal length f :
1
+ p
1
= i
1 f
.
(1)
Note that this relation is valid no matter what are the signs of f and i . (The sign of p is always positive.) The second relation gives the magnification in terms of the object and image distances: i m = − p
.
(2)
Note that this formula is valid no matter what the sign of i .
For some examples, let’s work through the values used to construct Figure
3. The concave mirror has a focal length of f = +25 length units. The object
O is at a distance of p = +40 length units. We can infer the location of the image from equation (1),
1
40
+
1 i
=
1
25
= ⇒
1 i
=
1
25
−
1
40
=
3
200
= ⇒ i =
200
3
≃ 66 .
3 .
(3)
Because i > 0 the image stands about 66.3 length units to the left of the mirror, so it is REAL and INVERTED. We can infer the magnification from
5
equation (2), m = −
200
3
40
= −
5
3
.
(4)
So if the height of the object is h = +20 length units then the height of the image is h ′ = + 100
3
≃ 33 if the image is inverted.
.
3 length units. Note that h ′ is always positive, even
The convex mirror in Figure 3 has a focal length of f = − 25 length units, and the object is at p = +50 length units. We again employ equation (1) to find the location of the image,
1
50
+
1 i
1
= −
25
= ⇒
1 i
1
= −
25
−
1
50
3
= −
50
= ⇒ i = −
50
3
≃ − 16 .
7 .
(5)
Because i < 0 the image forms on the other side of the mirror. Hence it is
VIRTUAL and NOT INVERTED. The magnification is, m = −
− 50
3
50
= +
1
3
.
(6)
So if the object is h = 20 length units high then the image is h ′ = length units high.
20
3
≃ 6 .
7
2. Spherical Refracting Surfaces
• Bad News: This subject is also very heavy in notation, and some of it disagrees with the notation for reflecting surfaces.
• Good News: There aren’t any new principles. Everything follows from Snell’s Law and we will provide simple rules to avoid even having to use that. Further, the discordant notation was arranged to make the simple rules carry over from reflecting surfaces.
Notation for Spherical Refracting Surfaces
We will consider refraction between two media, one with index of refraction n
1
, which contains the object being viewed, and the other medium with index of refraction n
2
, which contains the human who observes the object. The two regions are joined along a spherical boundary whose radius of curvature is r . Most of the notation is the same as for mirrors, in particular:
• Concave surfaces cave in on the object, whereas convex surfaces flex away from the object;
6
n
1
Concave Surface
O I
C
= 3
2 n
2
= 1 n
1
O
Convex Surface
I
= 3
2
C n
2
= 1
Figure 5: The figure shows a typical concave surface (with r = − 50) and a convex surface (with r = +50). The object is O and the corresponding image is I . The human observer in green is always opposite to the object. In each case the image is VIRTUAL (because it forms on the opposite side from the human) and NOT INVERTED, although note that REAL and INVERTED images are possible.
• The object distance p from the boundary is always positive;
• The image is REAL and INVERTED when it forms on the same side as the human, whereas the image is VIRTUAL and NOT INVERTED when it forms on the side opposite to the human;
• The image distance i is positive when the image forms on the side of the human and it is negative when the image forms on the side opposite to the human; and
• The magnification is negative for real images and positive for virtual images.
However, there is a crucial difference from the notation of mirrors:
• The radius of curvature r is positive for a convex refracting surface and negative for a concave refracting surface.
This last — discordant — convention was arranged in order to make the following analog of equation (1) apply for spherical refracting surfaces: n
1 p
+ n
2 i
=
( n
2
− n
1
) r
.
(7)
7
The magnification also goes over from (2), i m = − p
.
(8)
For some examples, let us use relations (7-8) to understand how Figure 5 was constructed. The concave surface in Figure 5 has a radius of curvature r = − 50 length units, and it separates a region of the object from a region of n
2 n
1
= 3
2 which contains
= 1 which contains the human. The object distance is p = +35. We infer the image location using equation (7),
3
2
35
+
1 i
=
(1 − 3
2
− 50
)
= ⇒
1 i
=
1
100
−
3
70
23
= −
700
= ⇒ i = −
700
23
≃ − 30 .
4 .
(9)
Because i < 0 the image is VIRTUAL and NOT INVERTED. That is, it forms on the same side as the object, which is opposite from the human.
(We would need p > 150 length units to get a REAL image with these values of r , n
1 and n
2
.) The magnification is, m = −
− 700
23
35
= +
20
23
≃ 0 .
870 .
(10)
So if the object height is h = 20 length units then the image height is about h ′ ≃ 17 .
4 length units.
The convex surface in Figure 5 has radius of curvature r = +50 length units. The object distance is p = 50 length units so equation (7) gives,
3
2
50
+
1 i
=
(1 − 3
2
+50
)
= ⇒
1 i
1
= −
100
3
−
100
= −
1
25
= ⇒ i = − 25 .
(11)
Because i < 0 this image is also VIRTUAL and NOT INVERTED. (Note that with these values of r , n
1 and n
2 there is no object distance p which would produce a REAL image. However, if we encased the human in glass with n
1
= 1 and n
2
= 3
2 then the image would be REAL for units.) The magnification is, p > 100 length m = −
− 25
50
= +
1
2
.
(12)
So if the object height is h = 20 length units then the image height is h ′ = 10 length units.
8
3. Lenses
• Bad News: The calculations involve fractions, which can be tough for an American!
• Good News: Many of the section leaders are foreign graduate students who can handle the complicated math for those of us who have had the benefit of American educational reforms.
A thin lens is produced by gluing together two spherical segments of refractive index n surrounded by air (whose index of refraction we shall take to be one.) The relation between the object and the image can be understood by two applications of relation (7):
• From the object side, with n
1 radius r
1
; then
= 1, to the lens of n
2
= n with curvature
• From n
1 r
2
.
= n to the human side with n
2
, bounded by curvature radius
The focal length of the resulting lens is,
1 f
= ( n − 1) h
1 r
1
1
− r
2 i
.
(13)
The focal length f will be positive for converging lenses and negative for diverging lenses.
As always, we measure the image position i as positive when the image forms on the same side as the human, which is a REAL, INVERTED image.
When the image forms on the side opposite to the human the image distance i is negative and the image is VIRTUAL and NOT INVERTED. The relation between the object and image is,
1
+ p
1 i
=
1 f
.
(14)
And the magnification is the same as always, i m = − p
.
(15)
9
I
Converging Lens
O O
Diverging Lens
I
Figure 6: The figure shows a typical converging lens (with focal length f =
+50) and a diverging lens (with focal length f = − 50). The object is O and the corresponding image is I . The human observer in green is always opposite to the object. In each case the image is VIRTUAL (because it forms on the opposite side from the human) and NOT INVERTED. However, a converging lens will form a REAL image which is INVERTED when the object distance is greater than the focal length.
For some examples let us consider how Figure 6 was constructed. The converging lens has focal length f = +50 length units, and the object distance is p = +25 length units. We can figure the image location out from equation
(14),
1
25
+
1 i
1
=
50
= ⇒
1 i
=
1
50
−
1
25
1
= −
50
= ⇒ i = − 50 .
(16)
Because i < 0 the image is VIRTUAL and NOT INVERTED. (Note that making p > 50 length units would produce a REAL, INVERTED image.)
The magnification is,
− 50 m = − = +2 .
(17)
25
So if the object height is h = 20 length units then the image height is h ′ = 40 length units.
The diverging lens in Figure 6 has a focal length of f = − 50 length units, and the object distance is p = 50 length units. From equation (14) we see that the image forms at,
1
50
+
1 i
=
1
− 50
= ⇒
1 i
1
= −
50
−
1
50
1
= −
25
= ⇒ i = − 25 .
(18)
10
Lens
Type
Object
Location
Image
Location
Image
Type
Image
Orientation sgn(f) sgn(r)
Converging Inside F Same Virtual Not Inverted +
Converging Outside F Opposite Real Inverted +
Diverging Anywhere Same Virtual Not Inverted − sgn(m)
+
−
+
Table 2: Table 34-2 with the entries filled in.
Because i < 0 the image is VIRTUAL and NOT INVERTED. (That will always be true for a diverging lens.) The magnification is, m = −
− 25
50
= +
1
2
.
(19)
So if the object height is h = 20 length units then the image height is h ′ = 10 length units.
Proceeding in this way we can fill out all the entries of Table 34-2 from the text.
This should also be on your formula sheet.
A compound lens system is obtained by simply inserting a second lens between the human and the object, as shown in Figure 7. Although the figure shows two converging lenses, either or both of the two lenses can be diverging. We can find the image the human sees by two applications of relation (14). First use the equation without reference to the second lens to find where the image from the first lens forms. For the compound lens shown in Figure 7 the focal length of the first lens is f
1 object distance from that lens is p
1
= +50 length units, and the
= +25 length units. Hence the image distance from the first lens is,
1
25
1
+ i
1
=
1
50
= ⇒ i
1
1
=
1
50
−
1
25
1
= −
50
= ⇒ i
1
= − 50 .
(20)
Because i
1
< 0 the first image is VIRTUAL and NOT INVERTED. Its magnification is,
− 50 m
1
= −
25
= +2 .
(21)
The image from the first lens provides the object for the second lens. The object distance to it is, p
2
= d − i
1
= 75 − ( − 50) = +125 .
(22)
11
I
1
O p
2 i
2
| i
1
| p
1 d
I
2
Figure 7: A compound lens system formed by two converging lenses, each with focal length f = 50, which are separated by a distance d = 75. The human observer is shown in green. The object O is at distance p
1 from the left lens, and the corresponding image I
1 is at i
1
= 25
= − 50 from the left lens and is magnified by m
1
= +2. Because i
1
< 0 the first image is on the same side as the object and NOT INVERTED. The distance of this first image from the second lens is p
2
I
2 is at a distance i
2
= + 250
3 respect to the first image) by m
= d − i
1
= +125. The final image from the second lens and is magnified (with
2
= − 2
3
. Because i
2
> 0 the final image is
REAL and INVERTED. The total magnification (with respect to the object) is M = m
1
× m
2
= − 4
3
.
Although this particular example produced a positive object distance note that the second object distance can be negative . When that happens it is no problem; just go ahead and compute the second image distance from equation (14). In our case we find the second image distance to be,
1
125
+
1 i
2
=
1
50
= ⇒
1 i
2
=
1
50
−
1
125
=
3
250
= ⇒ i
2
= +
250
3
≃ 83 .
3 .
(23)
Because i
2
> 0, the second image is REAL and INVERTED with respect to the first image . Because our first image was not inverted, the second image is also INVERTED with respect to the object, but it would have been
NOT INVERTED had the first object been INVERTED. Table 3 lists the various possibilities.
The final magnification also depends upon what happens in each lens.
For the case depicted in Figure 7, the magnification of the second image
12
Orientation of
1st Image wrt Object
Not Inverted
Not Inverted
Inverted
Inverted
Orientation of
2nd Image wrt 1st Image
Not Inverted
Inverted
Not Inverted
Inverted
Orientation of
2nd Image wrt Object
Not Inverted
Inverted
Inverted
Not Inverted
Table 3: Orientation of the final image relative to the object in a 2-lens system.
relative to the first image is, m
2
= −
+ 250
3
125
= −
2
3
.
The total magnification relative to the object is,
(24)
M = m
1
× m
2
= (+2) × −
2
3
= −
4
3
.
(25)
As a final example, consider problem 34-87 from the text. This consists of a compound lens system composed of two diverging lenses with the following parameters, p
1
= 20 , f
1
= − 12 , d = 10 , f
2
= − 8 .
(26)
We find the image distance from the first lens using equation (14),
1
20
+
1 i
1
=
1
− 12
= ⇒
1 i
1
1
= −
12
−
1
20
2
= −
15
= ⇒ i
1
= −
15
2
= − 7 .
5
(27)
Because i
1
< 0 the first image is VIRTUAL and NOT INVERTED. Its magnification is, m
1
= −
− 15
2
20
= +
3
8
.
(28)
.
The distance of the first image from the second lens is, p
2
= 10 + 7 .
5 = 17 .
5 =
35
.
2
(29)
13
Hence the distance of the final image from the second mirror is,
2
35
+
1 i
2
=
1
− 8
= ⇒
1 i
2
= −
1
8
2
−
35
51
= −
280
= ⇒ i
2
= −
280
51
≃ − 5 .
49
(30)
Because i
2
< 0 this second image is VIRTUAL and NOT INVERTED with respect to the first image. Because the first image was also NOT INVERTED,
.
the final image is NOT INVERTED with respect to the object. Relative to the first image, the magnification of the second image is, m
2
= −
− 280
51
35
2
=
16
51
.
Hence the magnification with respect to the object is,
M =
3
8
×
16
51
2
= +
17
≃ 0 .
118 .
(31)
(32)
14