On the dynamics of a quadruped robot model with
advertisement

On the dynamics of a quadruped robot model with
impedance control: Self-stabilizing high speed trotrunning and period-doubling bifurcations
The MIT Faculty has made this article openly available. Please share
how this access benefits you. Your story matters.
Citation
Lee, Jongwoo, Dong Jin Hyun, Jooeun Ahn, Sangbae Kim, and
Neville Hogan. “On the Dynamics of a Quadruped Robot Model
with Impedance Control: Self-Stabilizing High Speed TrotRunning and Period-Doubling Bifurcations.” 2014 IEEE/RSJ
International Conference on Intelligent Robots and Systems
(September 2014).
As Published
http://dx.doi.org/10.1109/IROS.2014.6943260
Publisher
Institute of Electrical and Electronics Engineers (IEEE)
Version
Author's final manuscript
Accessed
Mon May 23 11:08:46 EDT 2016
Citable Link
http://hdl.handle.net/1721.1/98282
Terms of Use
Creative Commons Attribution-Noncommercial-Share Alike
Detailed Terms
http://creativecommons.org/licenses/by-nc-sa/4.0/
On the Dynamics of a Quadruped Robot Model with Impedance
Control: Self-stabilizing High Speed Trot-running and Period-doubling
Bifurcations*
Jongwoo Lee1 , Dong Jin Hyun2 , Jooeun Ahn1 , Sangbae Kim2 , and Neville Hogan1
Abstract— The MIT Cheetah demonstrated a stable 6 m/s trot
gait in the sagittal plane utilizing the self-stable characteristics
of locomotion. This paper presents a numerical analysis of
the behavior of a quadruped robot model with the proposed
controller. We first demonstrate the existence of periodic trot
gaits at various speeds and examine local orbital stability of
each trajectory using Poincarè map analysis. Beyond the local
stability, we additionally demonstrate the stability of the model
against large initial perturbations. Stability of trot gaits at a
wide range of speed enables gradual acceleration demonstrated
in this paper and a real machine. This simulation study also
suggests the upper limit of the command speed that ensures
stable steady-state running. As we increase the command
speed, we observe series of period-doubling bifurcations, which
suggests presence of chaotic dynamics beyond a certain level
of command speed. Extension of this simulation analysis will
provide useful guidelines for searching control parameters to
further improve the system performance.
I. INTRODUCTION
Developing dynamic quadruped machines has been an
active field of research in robotics to exploit potential
advantages of the legged locomotion: enhanced mobility,
versatility and maneuverability in unstructured environments
[1]. Even though recent developments such as LittleDog
[2], BigDog [3], Tekken [4], and Wildcat [5] have shown
successful demonstrations of dynamic locomotion, highly
dynamic mobility observed in animals still outperforms what
these robots have achieved. For instance, few quadruped
robots in publications has shown Froude number (Fr)1 of
greater than 2 [7], which is significantly smaller than that of
animals [8].
Robotic researchers have improved their understanding
of the complex dynamics of legged locomotion by learning insights from biomechanical studies. Achieving highlydynamic locomotion of a quadruped robot is challenging due
to the inherent complexity of locomotion mechanics (highorder, nonlinear hybrid dynamics with inevitable ground
*This work was partly supported by the Defense Advanced Research
Program Agency M3 program
1 Authors are with the Eric P. and Evelyn E. Newman Laboratory for
Biomechanics and Human Rehabilitation Laboratory, the Department of
Mechanical Engineering, Massachusetts Institute of Technology, Cambridge,
MA, 02139, USA.
2 Authors are with the Biomimetic Robotics Laboratory, the Department
of Mechanical Engineering, Massachusetts Institute of Technology, Cambridge, MA, 02139, USA. Corresponding email: sangbae@mit.edu
1 Fr represents ratio between centripetal force and gravitational force. Due
to the dynamic similarity found in animals, Fr has been widely used as a
metrics of speed in both animals and robotics [6].
impact), which can be resolved by proper use of intuition
obtained from biological observation.
In particular, the self-stabilizing property2 has been investigated, which allows stable locomotion without neuronal
feedback [9]. A canonical model of running, ‘Spring Loaded
Inverted Pendulum (SLIP)’, showed that self-stability may
rest on properly adjusted leg compliance [10]. Ringrose
simulated this self-stabilizing behavior in monopod, biped,
and quadruped models with leg compliance at a fixed running speed [11]. Several machines employed similar control
strategies that hold such self-stablizing characteristics and
successfully demonstrated stable gaits [7], [12], [13].
Previously, we developed a controller that consists of
1) a gait pattern modulator to coordinate four legs, 2) a
leg trajectory generator to modulate interaction between the
robot and the ground, and 3) a leg controller to create
virtual leg compliance using impedance control [14], which
is inspired by SLIP model. The MIT Cheetah with the
controller recently achieved stable trot-running up to 6 m/s
(corresponding Fr ≈ 7.34) in the sagittal plane without attitude feedback [15]. This experiment supports our hypotheses
that the self-stabilizing dynamic locomotion can be achieved
with fixed leg compliance and properly designed trajectory
of equilibrium points.
To address its inherent complexity, dynamics of legged
locomotion have been analyzed using numerical simulation.
Although rigorous stability criteria of legged machine is still
in question, Poincarè return map analysis of periodic motion
is widely used to evaluate the stability of legged locomotion,
from the SLIP model [16] to more elaborate models which
entail specific controller and configuration of quadrupeds
[11], [17]. In legged mechanics, multiple step/stride-periodic
gait is often observed, depending on the control/environment
parameters. Goswami analyzed period-doubling bifurcations
leading chaotic motion of compass biped model by using
Poincarè analysis [18].
This paper presents a numerical analysis on the dynamic
behavior of a 11 degrees-of-freedom quadruped robot model
with the previously developed controller. Discussion of the
self-stabilizing behavior of the system at a wide range of
speeds is one focus of this paper. We examine periodic
trot gaits at various speeds and show their local orbital
stability using the Poincarè analysis. Convergence from large
2 Self-stabilizing locomotion in sagittal plane in robotics is defined as the
ability which can sustain steady periodic locomotion without direct control
efforts to stabilize the body attitude/height.
perturbation to stable limit cycles at various speeds indicates
applicability of the controller to real machines. Based on
this result, gradual acceleration of the robot was achieved
in a stable manner. The paper also focuses on the perioddoubling bifurcation and possible chaotic behavior at high
speeds, which is a characteristic of the trotting controller we
developed.
This simulation study suggests a way to find the maximum speed which ensures one stride periodic behavior.
We anticipate that further analysis on the dynamic behavior
may suggest a guideline for choosing control parameters to
enhance the system performance.
This paper is organized as follows: Section II and Section
III briefly describe a simulation model and the proposed
controller. Section IV exhibits interesting simulation results.
Section V discusses behavior of the system, followed by
conclusion and future works in Section VI.
II. MULTI-BODY DYNAMIC SIMULATOR
A. Modeling a quadruped robot
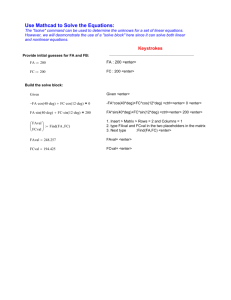
A planar, rigid, 11 degrees of freedom (DoF) quadruped
robot model is constructed to describe dynamic behavior of
the model in the sagittal plane (Fig.1). Model parameters
are obtained from Solidworks model of the MIT Cheetah
[15]. The configuration of each leg can be described by
2 generalized coordinates qi,1 , qi,2 , with leg index i ∈
{F R, F L, BR, BL}. The proximal and the distal segments
of each leg are designed to be parallel (qi,1 = qi,3 ). Three
coordinates describe position ((x, y)) and orientation (qp :
pitch) of the model with respect to the inertial reference
frame. We assumed that the robot interacts with the flat
ground with point feet, and the interaction follows the
Coulomb friction model (friction coefficient µ).
yb
Back body-fixed!
coordinate
yf
x
y
Local !
coordinate
qp
Front body-fixed!
coordinate
xf
xb
CoM
qi,1
Angular!
direction
qi,2
BR
Radial !
direction
FL
Virtual Leg
qi,3
BL
FR
Fig. 1. A quadruped robot model. The generalized coordinate of the model
is q := [qp , qF R,1 , qF R,2 , · · · , qBL,1 , qBL,2 , x, y]T ∈ <11 . The
virtual leg is also depicted.
B. Hybrid dynamics and Lagrange multiplier method
Dynamics of the model changes depending on the state of
each foot (stick, forward/backward slip, and no interaction).
Lagrange multiplier method [17], [19], [20] is adopted 1)
to construct equations of motion for each state and 2) to
simultaneously monitor vertical components of the ground
reaction forces and the height of each foot, in order to detect
transition between each dynamic state.
X
D(q)q̈ + C(q, q̇)q̇ + G(q) = B(q)u +
Ji (q)T Fi,ext (1)
i
D(q), C(q, q̇)q̇, G(q) and B(q) are the inertial matrix,
Coriolis and centrifugal terms, gravitational torque vector,
and the input matrix, respectively. u ∈ <8 is a vector of
i (q)
actuating torques at each joint. Ji (q) = ∂p∂q
is a Jacobian
matrix of a position vectors of each foot with respect to the
inertial frame. Ji (q)T Fi,ext transforms the ground reaction
forces Fi,ext := [Fi,T , Fi,N ]T from the Cartesian into the
T
T
, Ji,N
] and Fi,ext are non-zero if leg
joint space. JiT = [Ji,T
i is in contact with the ground.
Kinematic constraints are imposed in normal direction to
prevent the ground-contact leg i from penetrating the ground
(2). Either kinematic or force constraints are imposed in
tangential direction, depending on the state (stick/slip) of
corresponding leg (3). Equations (1)-(3) are solved for q̈ and
Fi,ext .
Ji,N q̈ + J˙i,N q̇
Ji,T q̈ + J˙i,T q̇ = 0
=
or
0
(2)
|Fi,T | = µ|Fi,N |
(3)
Impact between legs and the ground is assumed instantaneous and inelastic. Algebraic impact law is obtained by
integrating (1) with appropriate constraints [21]. Detailed
description of the modelling algorithms is presented in [22].
III. HIERARCHICAL CONTROLLER USING
SIMPLE IMPEDANCE CONTROL
Among biological observations, we noted 1) the existence
of the central pattern generator for multiple leg coordination
[23], 2) equilibrium-point hypothesis3 which describe animals’ motion mechanism [24], and 3) exploitation of the leg
compliance for locomotion [25].
Inspired by the above observations, we developed a controller for achieving stable and high-speed trot-running,
creating virtual leg compliance. A gait pattern modulator,
a leg trajectory generator and a leg impedance controller
are hierarchically structured as shown in Fig.2. The detailed
description of the controller is presented in [15].
A. Control framework
The gait pattern modulator generates swing/stance-phase
signals to four legs to create a single stride according to
the command speed. The signal generation is activated by
ground touchdown of a reference leg (Front right leg).
Each swing/stance signal increases from 0 to 1 linearly
over desired swing time T̂sw and desired stance time T̂st ,
respectively. Target gait pattern is imposed by having fixed
time-normalized phase difference between the reference leg
and the other legs. The command speed can be modulated
2L
by changing the desired stance time by vd = T̂span .
st
3 Animals might exert proper force on the environment by controlling the
equilibrium point of their limb virtual compliance, which penetrates into
the contact surface.
Structure of the control algorithm[1]
Operator
Desired Speed
Target Gait Pattern
Proposed ideas
High-level Controller
Leg Trajectory Generator
(Spatial property)
Gait Pattern Modulator
(Temporal property)
Programmable
virtual leg
compliance
Foot-end Equilibrium Points
Stride**-to-stride
pattern signal
Leg Controller
(Impedance control)
Motor
Currents
Adjustable
penetration depth
for stance state
MIT Cheetah
Encoder
Signals
Reference Leg
Touchdown detection
Terminology
Definition
T̂st
T̂sw
BF
Desried stance time
Desired swing time
Bézier control points
Half of the stroke length
Penetration depth of front legs
Reference point of front legs
Bézier control points
Half of the stroke length
Penetration depth of back legs
Reference point of back legs
radial stiffness of each leg
radial damping of each leg
angular stiffness of each leg
angular damping of each leg
Lspan,F
δF
P0,F
BB
Lspan,B
δB
P0,B
Kp,r
Kd,r
Kp,θ
Kd,θ
Touchdown
feedback of the
reference leg
Low-level Controller
TABLE I
A SET OF CONTROL PARAMETERS DESIGNED FOR THE SIMULATION
Value
Varies according to vd
0.25 seconds
Shown in [15]
170 mm
35 mm
(0 mm, -500 mm)
Shown in [15]
170 mm
10 mm
(0 mm, -500 mm )
5,000 N/m
100 Ns/m
100 Nm/rad
4 Nms/rad
[1] Hyun, Dongjin, Seok, Sangok, and Lee, Jongwoo. “High Speed Trot-running: Implementation of a Hierarchical Controller using Proprioceptive Impedance Control on the MIT Cheetah" "
The International Journal of Robotics Research , revised virsion, awating for EIC decision.#
Fig. 2.
A schematic structure of a developed controller.
IV. SIMULATION RESULTS
As shown in Fig. 3, the swing leg trajectory is designed by
using a 12-points Beziér curve, and the stance leg trajectory
is designed by a sinusoidal shape with a tunable amplitude
which determines the penetration depth of equilibrium point
into the ground. Four legs have identical swing trajectory,
but the virtual ground-penetration depth δF /δB for the stance
trajectories of the front/back legs are set to different values.
Each foot has virtual leg compliance created by simple
impedance control. The virtual impedance gains commanded
by the controller are listed in Table I.
0
Kd,✓
\
Kp,✓
−0.2
y−axis (m)
Kp,r
Kd,r
Protraction
−0.4
−0.5
Follow
throw
P0
Swing leg
retraction
2Lspan
−0.3
Fig. 3.
−0.2
−0.1
0
0.1
x−axis (m)
A. Local orbital stability of limit cycles at various speeds
Steady state locomotion is examined using Poincaré analysis. We define the Poincaré section as the instants when the
reference leg detects ground touch down.
xk+1 = P (xk ).
−0.1
−0.3
The controller is implemented in the dynamic simulator
introduced in Section II to analyze the performance of the
system: stability analysis of limit cycles, acceleration test,
and observation of period-doubling bifurcation phenomenon.
The analyses are all conducted in MATLAB R2013a (Mathworks Inc.). Equations of motion are numerically integrated
using ode45 solver with absolute/relative tolerance of 1e-6.
0.2
0.3
Trajectory of equilibrium points for virtual leg.
B. Control strategy
Referring to biological observations [8], [26], [27] and
preliminary experiments performed on the MIT Cheetah [28],
we propose to predetermine all the control parameters but
δF/B . We first adjust δF/B to minimize the body height
variation at a target speed, 4 m/s in the simulation. With
these determined δF/B , we simply change vd to accelerate/decelerate the robot model. Interestingly, with the fixed
set of control parameters in Table I, the robot model can
achieve stable trot-running in a broad range of speeds. In
the following sections, we address dynamic characteristics
of this self-stabilizing locomotion at various speeds.
(4)
The return map is defined in 21 dimensional space, all
states of the 11 DoF robot model except horizontal displacement which is ignorable coordinate. Among the 21 state
variables, we visualize the return map of pitch and height in
Fig.4. The data are obtained from 20 seconds of simulation
with arbitrary initial conditions.
In each graph, we can find a fixed point x∗ that satisfies
(5). Existence of fixed points demonstrates existence of
periodic motion at each speed. Each periodic trajectory
is visualized by projecting it onto pitch and height phase
portraits in Fig.5.
x∗ = P (x∗ ).
(5)
The local orbital stability of the limit cycle4 is equivalent
to the local stability of the fixed point. If all eigenvalues
(Floquet multipliers: λ) of the linearized mapping
fuction
about the fixed point (monodromy matrix, ∂P
∂x x∗ ) have
magnitudes less than one, the fixed point is locally stable,
such that perturbation ∆xk = xk − x∗ dissipates over time
[29].
∂P ∆xk+1 =
∆xk
(6)
∂x ∗
x
4 A limit cycle is a simple, closed and isolated trajectory in phase space
which attracts nearby trajectories as time goes to infinity or negative infinity.
The term ‘limit cycle’ is used as we found all of these conditions are met.
−25
−5.8
−3.7
−4
−3.8
−3.6
Pitchk[deg]
−3.4
−4.5−22
−24.5 −5.5
−24 −23.5 −5
−23 −22.5
Pitch [deg]
dPitchk/dt[deg/s]
k
−3.2
−4.75
−6.495
−4.75
0.5433
0.5466
0.5016
0.5082
Height [m]
Height
k [m]
0.550.515
−35
m/s
0.5433
0.5466
0.55
Height
map
of [m]
the body pitch
−30
4 m/s
/dt[m/s]
Pitchk+1
[deg]
dPitch
/dt[deg/s]
Heightk+1[m] k+1
Height [m]
k
−0.15
2 m/s
k k
= 0.6977
Im
0.4
0.2
0.2
0
Im
k+1
k+1
dHeight
Heightk+1[m]
0.6
0.4
k k
−0.6
k
30
0.4
20
0
0.5016
−0.2
−0.4
0.495
0.495
−0.8
−1
0.46
10
0
0.47
0.5016
0.5082
Height [m]
0.48
0.49
0.5
0.51 k0.52
Height (m)
a) Height
0.53
−0.35
−30
0.515
0.54
0.55
0.56
−0.3
0.4893
−10
−20
2 m/s
3 m/s
4 m/s
5 m/s
−0.6
1
−0.25
−6
−5
−4
Pitch (deg)
−3
−2
−1
b) Pitch
0
0.5
4 m/s
k k1 = 0.5126
1
0.6
0.6
0.4
0.4
0.2
0.2
0
0
0.5
5 m/s
−0.1
0.4894
1
−0.4346
k k1 = 0.7461
−0.4348
−0.435
−0.4352
0
−0.4354
−0.2
−0.3
−0.2
0.4893
0.4893
/dt[m/s]
dHeight[m]
Height
k k
−0.4358−0.4356−0.4354−0.4352−0.
dHeightk/d
−0.4
−0.6
−0.8
−0.8
−1
−1
Fig. 5. Projection of limit cycles at various speeds onto a) height phase
portrait, and b) pitch phase portrait.
−0.4344
−0.5
Re
0.8
−0.6
−1
−0.5
0
0.5
Re
Fig. 6.
1
−1
−0.5
0
0.5
1
Re
Floquet multipliers at various speeds.
B. Convergence from wide-range of perturbation
Local orbital stability only guarantees convergence of
motion to the limit cycle from small deviation. In order to
implement the controller on a real machine, stability against
more realistic range of perturbation should be investigated.
Therefore, we demonstrate the dynamic behavior of the robot
model under large initial perturbations on three states such
as the body pitch, height, and speed.
As shown in Fig.7, despite state perturbations more than
5 times of steady periodic motion variability, the model
behavior converges to each limit cycle. This convergence
from wide-range of perturbation suggests that the designed
controller is applicable to a real machine.
−11.1 −11
dPitchk/dt[d
−0.2
dHeight
−0.4358−0.4356−0.4354
−1
1
0.8
−0.2
−0.4
0.4892
−0.4−0.4
0.4892
−40
−50
−7
Im
0.2
−11.14 −11.12
−0.4352
−0.25
−0.25
−0.4354
Re
4.0
0.4893
−0.2
−0.1
0.4894
−1
unit circle
−0.5
Im
40
dPitch/dt (deg/s)
[m]
k+1
Height
dHeight/dt (m/s)
dHeightk+1/dt[m/s]
Heightk+1[m]
0.8
−0.3
−0.2
0.4893
0.4893
/dt[m/s]
dHeight
Heightkk[m]
0
−0.8
−1
0.5082
0.6
−11.11−0.2−0.435
−0.6
kk
−0.8
−1
−0.4346
−11.09 −0.4348
−11.1
−0.4
−0.4
−0.15
−11.07
−0.2
k
pitch
−11.05
−0.4344
−0.1
−11.06
−11.08
k k1 = 0.5873
−0.15
3 m/s
0.8
0.6
−0.2
50
1
−0.25
The dotted lines and−11.04
arrows
−0.25
1
0.8
k
−0.25
−11.03
0.4893
−0.2
−0.34
−20
0.548
−0.2 −0.345
0.4893
−6.505
k
height
/dt[deg/s]
−0.15
−15
−6.5
−0.335
k
k+1
0.5415
0.548 −0.33 0.555
−0.35
−0.34
−0.32 5 m/s
Height
[m] line of x
dHeight
crosses a diagonal
k /dt[m/s]
k+1 = xk .
1
The Floquet multipliers of 0.5016
each limit cycle at various
0.4893
−0.3
−0.35
−25
−0.25
speeds
are shown in Fig.6. All the Floquet multipliers stay
0.515
−0.35
−0.355
0.5415
inside
unit circle, therefore we can
conclude
local
orbital
sta0.5433
−0.3 −30
0.51 −5.35
−0.4
−0.36
0.495
−6.51
0.4893
0.4892
−4.95
−4.75
−35
−25
−20 −6.5−15
−10
−6.51 −30 −6.505
−6.495 −5
0.495
0.5016
0.5082
0.515
−0.4
0.4892
bility −5.35
of each−5.15
limit
cycle.
Only
5 eigenvalues
are
Pitch [deg]
dPitch[deg]
/dt[deg/s]
Pitch
Height
[m] noticeably
−0.35 −0.365
0.505
different
from
zero
since
16
states
corresponding
to
motion
0.535
0.54
−0.4
0.535
0.5415
0.548 −0.33 0.555
0.54
0.5433
0.5466
0.55
−0.36
−0.35
−0.34
−0.32
0.5 0.505
0.515
0.535stabilized
0.54
−0.35 −0.3 −0.25
−0.2
−0.15 −0.1 −0.05
Height
[m]
Height
[m],0.525
dHeight
/dt[m/s]
0.4892
of legs
(qi,10.51
, q̇i,1
, q0.52
q̇i,20.53
) are
by local impedance−0.45 −0.4
i,2
Height
[m]
/dt[m/s] 0.4893
dHeight
0.4892
0.4893
0.4894
Heightk[m]
0.515
0.4894
controller.
−0.1
0.52 0.5466
−5.15
k+1
kk
0.4894
−0.1
50.535
m/s
−0.36
−10
dHeightk+1/dt[m/s]
Heightk+1[m]
[deg]
Heightk+1[m]
Pitch
k+1
0.525
k
k
−6.4950.535
0.5082
−0.15
−11.09
−26
−6.505
−6.495 −5
−25
−20 −6.5
−15
−10
−11.1
Pitchk[deg]
dPitch
/dt[deg/s]
−25
−28
−0.355
k
0.5415
−11.11−0.2
−4.6
0.535
−0.4
−0.36
−6.51
0.4892
−4.6
−30−11.14 −11.12
−25
−24.5 −24−4.467
−23.5
−23−4.334
−22.5
−22 −4.2
−21.5 −21 0.535
−0.36
−0.35 0.4893
−0.34
−0.33
−0.32
0.548 0.4893
−6.505 −15
−6.5
0.4892
0.4894
−0.40.5415
−0.3
−0.2 0.555
−0.1
−30 −6.51
−25
−20
−10
−5−6.495
Pitch
[deg]
dPitchk/
dPitch
/dt[deg/s]
dHeight
/dt[m/s]
Height
[m]
Pitch
k k [deg]
[m]
/dt[m/s]
dHeight
dPitch /dt[deg/s]
k
kHeight
−0.365
Fig. 4. Return
and height at various speeds. Each return map
k
0.555
illustrate
convergence to the fixed points.
−0.1
0.4894
0.53
−4.95
0.55
−24−11.08
−0.355
0.4893
0.5415
−30 −0.3
−0.36
−6.51
−35−6.51−30
−0.35
−0.365
dHeight
−5.15
−4.95
Pitchk[deg]
−22−11.07
/dt[m/s]
0.548
−0.345
−4.4667
−6.505
−24.5
−0.35
−25
−30
k+1
−0.34
−24
−20
k
0.515
−28
−11.04
−18
−11.05
−20
−0.1
−11.06
/dt[m/s]
−5.1
−26
dHeightk+1/dt[m/s]
0.54
0.495
0.54
0.495
−3.05
−24
−16−11.03
dPitchk+1/dt[deg/s]
−3.3
−6.5
−4.3334
−0.335
−23.5
−15
5 m/s
−0.1
−15−6.5 3 m/s
−0.335
−0.15
−0.34
−20
0.4893
0.548
−0.2
−0.345
−6.505
−0.35
−25
−0.25
dPitch /dt[deg/s]
k+1
dPitch /dt[deg/s]
−10
k+1
−4.75
−3.55
−5.2 Pitch [deg]
−5.15
k
Pitchk[deg]
0.4894
0.555
5 m/s
3 m/s
dHeight
−3.8
−5.25−3.8
−5.25
−22
−0.320.546
dHeightk+1/dt[m/s]
0.5433
−20
−10
−23 0.555
−5.35
−5.35
0.54 4
0.54
−6.495
−4.2
−22.5
0.5016
0.5433
−5.2
k
k+1
Heightk+1Pitch
[m]
Heightk+1[m] k+1[deg]
Heightk+1[m]
0.5466
−3.55
0.546
42m/s
m/s
0.5082
0.5466
−5.15
−3.3
Pitch
[deg]
Pitchk+1
[deg]
k+1
0.55
−5.15
0.55
−4.95
0.545
0.5455
Heightk[m]
dHeight dPitch
/dt[m/s] /dt[deg/s]
k+1 Pitch
k+1 [deg]
Heightk+1[m]
k+1
dHeightk+1/dt[m/s]
Height [m]
0.515
44 2m/s
m/s
m/s
−3.05
−0.355
−25 −300.542
−6.51
−0.36
−6.51−30
−6.505
−6.495 −5
−25
−20 −6.5
−15
−10
−4.6−35
0.541 −24
Pitch
[deg] −22 −21.5 −21
−24.5
−23.5 −23
−22.5
−4.6
−4.467
−4.334
dPitch
kk/dt[deg/s]−4.2
−0.365
dPitch
/dt[deg/s]
Pitch
[deg]
−4.6
0.54
−4.6
−24.5 −24−4.467
−23.5 −23−4.334
−22.5 −22 −4.2
−21.5
−21 0.54−0.35
0.542
0.544
−0.34
−0.33
−6.495−0.36
dHeightkHeight
/dt[m/s]k[m]
Pitch
[deg]
dPitch
/dt[deg/s]
k
k+1
−3.05
−25
−6.505
−4.4667 0.543
−0.35
−24.5 −25
k k
dPitchk+1/dt[deg/s]
−5.1
−3.55
−3.3
Pitchk[deg]
0.5445
−4.750.5445
−4.75
−3.05
dPitch
/dt[deg/s]
Pitch
k+1 [deg]
k+1
dHeight /dt[m/s]
k+1
Pitchk+1[deg]
Height [m]
−3.8
−3.8
−5.15
−4.95
−3.55Pitch [deg]
−3.3
Pitchkk[deg]
−4.4667
−24.5
−18
−200.544
dHeightk+1/dt[m/s]
Heightk+1[m]
−5.35
−5.35
−3.8
−3.8
−24
−0.345−24
−16
3 m/s
dPitch
0.545
−4.3334
−23.5
dPitch
/dt[deg/s]
Pitch
k+1 [deg]
k+1
−5.15
−3.55
dHeightk+1/dt[m/s]
dPitch
/dt[deg/s]
Pitch
k+1 [deg]
k+1
−23
0.5455
−3.55
0.546
−23
−15−6.5
−0.335
−4.3334 0.545
−23.5
−0.34
3 m/s
Heightk+1[m]
−3.3
k+1
Pitch [deg]
Heightk+1
[m]
k+1
Pitch
[deg]
Pitch
k+1
[deg]
−3.3
−4.2
−22.5
2 m/s
−4.95
dPitch
/dt[deg/s]
Pitch
[deg]
k+1
k+1
0.546
2 m/s
−3.5
−21
−4.2
−22.5 −10
−3.05
−3.05
−4
−21.5
C. Gradual acceleration
Recovery from large perturbation in speed to the stable
limit cycle shown in Fig.7 implies that the controller can
accelerate/decelerate the robot model as shown in Fig. 8.
The robot model is commanded to accelerate gradually from
a speed of 1 m/s up to 6 m/s during 35 seconds, then to
maintain its speed. Up to 5.5 m/s, variation in both height and
pitch gets smaller as stride frequency increases. However, we
can observe larger variability at higher speeds. To understand
the behavior of the model at high speeds, we examine the
Poincarè map.
6.2
4
2
k+1
2
7
7
5
1
a)
3
2
2
3
Magnify
Speed
3
b)
0
5.9
5
1
a)
5.8
5.7
5.6
2
6
5.8
a)
7
3
5.7
5.6
Period-1
Period-2
6
6 25.4
5.3
5.3
k
−5.5
−5.5
Pitchk+1[deg]
1
0.48
/dt[deg/s]
−10
−15
−15
5.62
−10
−15
5.62−10
−20
−20
5.57
−30
−35
−25
−25
−25
5.57
−30
5.57
−30
5.57
−35
−30
−15
5.62
−20
−25
5.57
−30
−20
−15
5.62
−25
−20
5.57
−30−25
k+1
−25
−20
k+1
5.62
−15
5.62
k+1
−20
−10
−15
−355.57
−30
k+1
−
5
5.4 −20 5.−
−25
−30
−25
−
−35
−30 −
−40
−35 −
−40
−30
−25
−30
−35
−40
−30
dHeightk+1/dt[m/s]
5.67
−10
−5
−
−15
−20
k+1
0.48
−15
5.62
Speedk+1
[m/s]
dPitch
/dt[deg/s]
−5
k+1
0.48
−5
−0.3
−20
dPitchk
−0.3
−
−0.35
−0.3 −0
−0.4
−0.35 −
−0.35
dHeightk+1/dt[m/s]
0.48
k+1
Heightk+1[m]
0.48
−10
Speedk+1
[m/s]
dPitch
/dt[deg/s]
k+1
Speed /dt[deg/s]
[m/s]
dPitch
k+1
0.48
0.49
0.49
−5
−10
Speedk+1
[m/s]
dPitch
/dt[deg/s]
0.48
−7.5
0.49
0.49
−20
−5.5
Speedk+1
[m/s]
dPitch
/dt[deg/s]
−7.5
Heightk+1[m]
−7.5
0.49
k+1
−6.5
[m]
−6.5
0.49
Heightk+1[m]
−7.5
Heightk+1[m]
−7.5
k
−7.5
−6.5
Pitchk[deg]
0.5
0.49
Height
Heightk+1[m][m]
k+1
−7.5
−5.5
−6.5
Height
−7.5
−6.5
k
0.5
Pitchk+1[deg]
Pitch
[deg]
k+1
−6.5
−6.5
Pitchk+1[deg]
Pitchk+1[deg]
−5.5
Pitchk+1[deg]
−6.5
Pitchk+1[deg]
Pitchk+1[deg]
−5.5
dPitch
k
k
−7.5
Speedk+1
[m/s]
dPitch
/dt[deg/s]
Speed
[m/s]
dPitch
/dt[deg/s]
k+1 k+1
Pitchk+1[deg]
k
/dt[deg/s]
Cannot define periodicity−15
−8.5
−6.5
−
−10
−10
−7.5
−6.5
The transient
behavior
of −8.5
the period-two
gait is−5.5
shown in
−8.5
Pitch [deg]
−8.5
−8.5
−7.5
−6.5
−5.5
−8.5
−7.5
−6.5
−5.5
Pitch
[deg]
−8.5 height,
Fig.10. The pitch,
and
speed
return
map
show
clear
−8.5
−8.5
Pitch [deg]
−8.5
−7.5
−6.5
−5.5
−8.5
−7.5
−6.5
−5.5
−8.5
−7.5
−6.5
−5.5
[deg] Pitch [deg]
Pitch [deg]
evidence of a period-twoPitchgait.
The states
of the model at
two points of (7), and eventually
5.67
−5.5each stride, xk , converge to 0.5
−5
5.67
0.5
5.67
0.5
−5
−5
repeats
themselves
every
two
strides.
−105.67
5.67
0.5
5.67
−5.5
0.5
−8.5
−8.5
−5.5
Period-4
−7.5
dPitch
−7.5
Spe
−5
−6.5
Pitchk+1[deg]
Pitchk+1[deg]
Pitchk+1[deg]
Pitchk+1[deg]
−7.5
75.7
−5
1
k
−5.5
5.6
Fig. 9. Plot a) shows the return map of speed. Plot b) magnifies the high- 5.4
−6.5
−6.5
speed region. Period-one,
period-two, and period-four gaits are represented
0
as black,
blue, and−6.5green −6.5
crossings,−6.5
respectively.
At even
higher3 speed, 4 5.3
0
0
1
2
0
1
2
3 −7.5
4
5
6
7
(m/s) 5.3
periodicity is not defined (red crossings).
Period-1Speedkfor
Speedk (m/s)The simulation was conducted
−5.5
−7.5
Period-2
−5
100 - 180 strides,
−7.5 and the last 32 strides are plotted in the graph.
Pitchk+1[deg]
Fig. 7. Transient and steady behavior of the system at various command
speed with initial large perturbations on the body pitch, height, and speed.
5.6
5.5 6
5.5
5.6
k
−5.5
3
7 Spee
5.7
Cannot define
5.3 periodicity
7 35.7 5.8 5.9 4 6 5.36.1 6.2 5.4
5 6.3
Speed (m/s)
Speed
(m/s)
k
5.5
2
6.3
5.4
Period-4
2
5.4
5 71
6
5.8
6.2
/dt[deg/s]
0
3 3
4 0
4
5
Speed (m/s)
−5.5
Speed
(m/s)
−5.5
k
6.1
k
k+1
a)
5.9
/dt[deg/s]
5
5.6
0
0
1
3
4
5
5.3
5.3
5.4
5.5
5.6
Speedk (m/s) 5.7 Speed5.8(m/s) 5.9 6
b)
5.5
5.4
k+1
1
3
4
Speedk (m/s)
−5.5
2
5.4
5
b)
dPitch
0
2
1
6
1
5.7
dPitch
2
1
2
6.1
5.3
3
4 5.3
Speedk (m/s)
7
5.5
46
5.9
5.5
0
2
dHeightk+1/dt[m/s]
1
a)
3
0
6
5.8
dHeightk+1/dt[m/s]
0
3
k+1
4
Speed
(m/s)
Speed
(m/s)
k+1
2 0
k+1
0
5.4
5.9
2
6.1
1
0
4
(m/s)
6.2
1
5
4
k
5
6.3
1
1
5.5
b)
6.2
6.1
6
2
0
6.3
3
6
Speedk+1 (m/s)
5a)
1
0
5.6
Magnify
6.2
6
2
Speed
Speed
(m/s) (m/s)
k+1
6.3
1
Speedk+1 (m/s)
1
4
6
2
Magnify
Speedk+1 (m/s)
3
0
Speedk+1 (m/s)
0
7
4
6.1
6
5
4
a)
3
target6 speed increases.
4
Speedk+1 (m/s)
Speedk+1 (m/s)
a)
Speed
7
5
Speedk+1 (m/s)
6
(m/s)
6
−0.45
−0.4 −0
−0.45
−0.5
−0.45 −
−0.5
−0.55
−0.4
−0.55
−0.5 −0
−0.55 −
−35
−0.6
−0.6
−40−35
−35 −40
−35
−40 −40
5.52
5.52
−8.5
−8.5 −8.5
5.52 5.52
0.47 0.47
0.47
−8.5
0.47
−0.6
5.57
5.62
5.67
−8.5
−7.5
−6.5
−5.5
−30
−20
−10
0 −0.6−0.7
1
5.52−30
5.57−20
5.62
5.67
−7.5
−6.5
−5.5 0.47
−305.52
−20
−10
0
10
5.52
5.57
5.6
5.57
5.62
5.67
0.48
0.49
0.5−40
−8.5
−7.5
−6.5
−5.50.47
−30
−20
−1
−8.5
−7.5
−6.5 −8.5
−5.5
−10
0
10
0.48
0.49
−0.7
0.47
0.48
0.49
0.50.48 0.5 5.52
0.47
0.49
0.5
−40
−40
Speed
[m/s]
Pitchk[deg]
dPitch
/dt[deg/s]
Height [m]
dHeigh
Speed
[m/s]/dt[deg/s]Speed
dPitch
Speed
[m/s]
Pitch [deg] Pitchk[deg] Pitch
dPitch
/dt[deg/s]
Height [m] Height
[m/s]
[deg] 0.47
dPitch
/dt
Height [m]
k [m]
−8.5
k
k
5.52k k k k
−8.5 k
k
0.47 k
k
k
5.52
k 5.52
−8.5
0.47 k
5.52
−8.5
−7.5
−6.5
−5.5
−20−30 5.62
−10
0 −10
0.47
0.48
0.49
0.5
5.52
5.57
5.62
−8.5
−7.5
−6.5
−5.5
−20 −30 5.67
05
0.47
0.48
0.49
0.5
5.52
5.57 −2010 5.6
−8.5
−7.5
−6.5
−5.5
0.47
0.48
0.49 −30 5.57
0.5
Speed
[m/s]/dt[deg/s]
Pitchk[deg] Pitch [deg]
dPitch
Height [m] Height [m]
[m/s]/dt[deg/s]
dPitch
Speed
[m/s/
Pitch [deg]
dPitch
Height [m]
k
k Speed
k
k
k
k
k
k
k
k
5.47
5.47
0.47
x∗ = P (x̄∗ )
(7)
Each of these points experiences another period-doubling as
−0.5 −0.45 −0.5 −0.45
−0.55
−0.7
−0.5 −0.55
/dt[m/s]
−0.35
−0.4
k+1
−0.6
−0.4
dHeight
−0.4 −0.45
dHeightk+1/dt[m/s]
dHeightk+1/dt[m/s]
k+1
−0.55
−0.3
−0.35
−0.4
−0.45
−0.45
−0.6
−0.5
−0.5
dHeight /dt[m/s]
−0.5
k
−0.4
−0.3
−0.5
−0.55
−0.6 −0.55 −0.6 −0.55
−0.55
−0.6
−0.6−0.7
−0.6
−0.5
−0.6
−0.7
−0.6
−0.6
in multiple ways. First, the
simulation results are consistent with ten times higher ab- −0.4−0.5 −0.3−0.4
dHeight /dt[m/s]
dHeight /dt[m/s]
solute/relative tolerance (1e-7) and with a different
solver
−0.7
−0.6
−0.7
−0.6
−0.5
−0.7
−0.6−0.7−0.4
−0.5dHeight
−0
/
−0.6−0.3
k
Height
[m]
dHeight
/dt[m/s]
Height
[m]
dHeight /dt[m/s]dHeight
[m]
(ode113 in Height
MATLAB
R2013a).
Second, the net horizontal/vertical impulses applied by
the ground reaction forces and the gravitational force per
stride are computed in the simulation after sufficient iteration
from arbitrary initial condition, as shown in Table II. The
impulse computed from the discrete impact map is added
to the momentum change. The error in vertical direction
corresponds to 0.058 % and 0.022 % in total mass for single
stride and average of 30 strides, respectively. The results
are consistent with the linear momentum principle in the
presence of possible numerical artifacts.
k
Fig.9 shows the speed return map of the model at various
speeds. This speed return map clearly illustrates occurrence
of period-doubling bifurcations as speed increases.
Up to 5.5 m/s, the state of the model converges to a
single fixed point (black crossing marks in Fig. 9) after
sufficient number of iterations (>90). As the command speed
(vd ) is changed, the Poincaré map is also modified and the
corresponding fixed point continuously shifts.
For higher values of speed, the system exhibits perioddoubling phenomena. After the 1st bifurcation, a period-two
gait appears as two points in the map, x∗ and x̄∗ , which are
inter-related as in (7).
x̄∗ = P (x∗ ) and
k
k
5.47
5.5
5.53
5.56
5.47
5.5
5.53
5.56
5.47
0.48
0.49
0.5[m/s]
Speed
[m/s]
0.47
0.48
0.49
0.5
Speed
5.47
5.5
5.53
5.56
Height
[m] k 5.47 5.47k
5.47
0.47
k 5.5 Heightk[m]
5.470.47
5.56
5.470.47 5.53
5.5
5.53
0.47
0.47
0.48
0.49
0.5
[m/s] 5.56
5.47 Speed
5.5
5.53
5.56
0.47
0.48
0.49
0.5
Speed
[m/s]Speed
0.47
0.48
0.49
0.5
[m/s]
Height
[m] kSpeed
0.47
0.48
0.49[m/s]
0.5
k
k k
0.47
0.47
D. Period-doubling bifurcation points
Height
Speed
Height
k+1
Fig. 8. Gradual acceleration of the model. The model is accelerating from
5.47
5.5
5.5
5.47
5.5
5.53
5.56
A.0.475.5
Validation
of
1 m/s to 6 m/s for 35 seconds (5-40 seconds). a) Pitch, b)0.48height,0.48and
0.47
0.48
0.49
0.5 simulator
Speed
[m/s] the
Height [m]
0.48
5.5
5.5
c) forward speed of the model are plotted over time. The speed0.48at which
5.5
0.48
0.48
The simulator was validated
period-doubling behavior occurs is also denoted as dotted line.
−0.3
−0.4 −0.35
−0.4 −0.35
−0.5
V. DISCUSSION−0.45
5.53
−0.3 −0.35
−0.45
dHeightk+1/dt[m/s]
5.5
dHeightk+1/dt[m/s]
0.49
dHeightk+1/dt[m/s]dHeightk+1/dt[m/s]
[m/s]
−0.35
k+1
Heightk+1[m]
Speed
0.48
[m]
0.49
0.49
5.53
5.53
Speedk+1 [m/s]
5.53
Speedk+1 [m/s]
k+1
5.53
k+1
0.49
0.49
HeightSpeed
[m]
k+1
[m/s]
[m]
5.53
k+1
Height
[m]
Heightk+1[m]
Speedk+1 [m/s]
0.49
[m/s]
5.56
0.5
Heightk+1
[m]
Speed
[m/s]
k+1
5.56 0.5
0.5
b)
c)
b) Height
Height b) Height
a) Pitch a) Pitch a)
b) Height
c) Speed
Speedc) Speed
a) Pitch
Pitch
c) Speed
k
0.5 5.56
a) Pitch
b) Heightb) Heightb) Height
c) Speedc) Speed c) Speed
a) Pitch a) Pitch
−0.3
5.56
Fig. 10. a) Pitch, b)height, and c) forward speed of −0.35
the model of 70 strides
0.5 5.56
−0.3
−0.3
−0.3
are plotted
on each return map.
5.53
0.5 5.56 0.490.5 5.56
−0.4
k
k
k
k
k
B. Summary of the period-one trot gait created by the
proposed controller
The trot gait created by the proposed controller shows several characteristics. The trotting robot model exhibits stable
limit cycles at various speeds as shown in Fig. 5. The stability
k
k
TABLE II
N ET IMPULSE COMPUTED FOR A SINGLE STRIDE AND AVERAGED FOR 30
STRIDES
Direction
Vertical
Horizontal
Single stride
-0.0458 (Ns)
0.0069 (Ns)
Average of 30 strides
0.0217 (Ns)
0.0056 (Ns)
of limit cycles is supported by Floquet multipliers (Fig.6),
and convergence from large initial perturbation (Fig.7).
When the robot model accelerates gradually by increasing
its stride frequency, it is observed that variation of the
body pitch and height are large in low speed regions. The
equilibrium trajectories of front/back legs are tuned for the
speed of the robot at 4 m/s. The increasing body pitch/height
fluctuation at region of different speeds might be due to the
strategy of the fixed equilibrium trajectories. The parameter
sweep on the δF /δB at various speeds would enable minimal
variation of the body pitch/height at various speeds.
It should be noted that these subsequent findings were
achieved with the controller without any attitude measurement. Thus, the self-stabilizing property of the robot-andcontroller system is validated.
C. Bifurcation points and possible chaotic dynamics
We observed period doubling bifurcation points which
introduced period-two gaits and period-four gaits. The blue
crossing mark at 5.5 m/s is barely noticeable as a periodtwo gait in the scale of Fig.9. Hence, the 1st bifurcation
point is expected to locate near 5.5 m/s. There might exist a
cascade of period-doubling bifurcation points which induce
period-2n gaits such as period-eight, however the result
presented in this paper does not show them. More dense
search in the high range of speed needs to be conducted
to observe more period-doubling bifurcation points, if exist,
because in general progression of bifurcation occurs along
with smaller change of parameters (vd in this paper) [18].
Period-doubling bifurcations caused by extreme velocities
has also been observed in biped models and debatably in
humans with the phenomenon of functional asymmetry [30],
although further investigation is required to conclude this is
a characteristic of legged locomotion or not.
A cascade of period-doubling bifurcation in legged machines often leads to chaotic dynamic behavior, as observed
in [18]. To verify whether the system behavior is chaotic or
not, 1) the fractal dimension, which provides a lower bound
for Hausdorff-Besicovitch dimension can be computed using
the algorithm provided in [31], 2) we can examine whether
nearby trajectories exponentially diverges [32], or 3) we can
conduct a large number of iteration to reveal broad-band
frequency characteristics of a chaotic system [18].
As shown in Fig.8 and Fig.10, period-doubling incorporates large fluctuation in pitch and height, which might
be undesirable in the use of legged machine. In general,
large fluctuation might be undesirable for the purpose of
transportation, and may induce large impact loss which
harms energy efficiency.
However, it should be noted that all of the simulation results are obtained with a predefined, fixed control parameters
as in Table I. Even though we do not report the result here,
our preliminary study showed that changing some of the
control parameters affects the occurrence of bifurcation at
a certain speed. Therefore, a further systematic investigation
is required.
VI. CONCLUSIONS AND FUTURE WORKS
A. Conclusions
Locomotive stability of the controller presented in [15]
was validated with analyses presented in this paper. A
dynamic simulator with a complex model was constructed.
In the simulation, we analyzed orbital stability of periodic
locomotion. Further, the simulation revealed that a single set
of predefined control parameters with fixed leg compliance
and properly tuned δF /δB can accomplish not only stable
periodic locomotion at a wide range of speed but also
a gradual acceleration. Lastly, subsequent period-doubling
bifurcation points are found as the command speed increases.
The behavior of the system at high speed appears to be
chaotic, but further analysis is required to be sure.
After the performance was verified in the simulation,
the controller was implemented on the MIT Cheetah and
achieved self-stabilizing trot running accelerating up to 6 m/s
with small height/pitch variation (2.7 cm/ 2.6 deg at 6 m/s)
as shown in the Appendix [15].
High speed robot running with complex dynamics requires fast computation. Self-stability with minimal sensory
feedback and control efforts can significantly contribute
to resolving this challenge. More elaborate tasks can be
achieved by adding higher level controllers on top of the
presented controller, as mentioned in [11].
B. Future works
We plan to perform further analysis on the dynamic
behaviors of this model. Several candidates are listed below.
• Quantitative analysis on the basin of attraction should
be performed for each limit cycle to figure out range of
disturbance the self-stability can handle.
• Optimal relation between control parameters can be
found. The constrained search space may limit the
performance. We can relax fixed/predefined control parameters and investigate effects of each on performance.
• The behavior of the system at high speeds should be revisited to determine whether it actually has chaotic motion. We can also investigate how each control parameters affect bifurcation points: the bifurcation can occur
at higher/lower speed. Examination of system behavior
with fine grid (<0.1 m/s resolution) of vd is required to
observe cascade of period-doubling bifurcations.
• Bifurcation phenomenon in the experimental robot can
be investigated at speeds higher than the maximum
speed achieved in the previous experiment.
APPENDIX
500
trot running with speed of 6 m/s
500
450
height (mm)
height (mm)
height (mm) height (mm)
height (mm)
500
trot running with speed of 6 m/s
height (mm)
trot running with speed of 6 m/s
450
500
400
450
trot running with speed of 6 m/s
400
500
400
450
350
trot running with speed of 6 m/s
500
trot running with speed of 6 m/s
350
450
350
400
450
300
45
300
400 45
300
400 45
350
45.5
46
45.5
45.5
46
46
46.5
46.5
46.5
2
0350
350 0
Pitch (deg)
0
300 45
45
−4 −1
−4
45.5
46
46.5
45.5
45.5
46
46
46.5
46.5
45.5
46
46.5
2
47.5
47
48
48
47.5
47Time (s) 47.5
47
47.5
Time (s)
Time (s)
48.5
48.5
48
48.5
48
48
48
49
49
49
48.5
48.5
48.5
49
49
49
0−6 −2
−6
0
1−3
−8
−2−8
−2
0−4
Pitch (deg)
Pitch (deg)
Pitch (deg)
300 1
45
−2300
−2
47
47Time (s) 47.5
47
47.5
Time (s)
Time (s)
−10
−1
−4
−4−545
−10
4545
−2
−6 −6
45.5
45.5
46
46
46.5
46.5
47
4747
Time (s)
47.5
47.5
47.5
48
48 48
48.5
49
48.5 48.5
49
49
Time (s)
−3
−8
−8 −4
Fig.−10−10
11.
Experimental
validation
of 47the stable
and high-speed
trot 49running
−545
45.5
46
46.5
47.5
48
48.5
45
45.5
46
46.5
4747
47.5
48.5 48.5
49
45.5
46
46.5
47.5
48
49
Time (s)
with 45small
height/pitch
variation.
Graphs
obtained
from48 [15].
Time (s)
Velocity (m/s)
6
Velocity
5
4
3
2
1
0
5
10
15
20
25
30
35
40
45
50
10
Fig. 12.
Experimental validation of the gradual acceleration capability2 of
the controller. Fr
Result obtained from [15].
1
COT
Fr
COT
5
ACKNOWLEDGMENT
This
project was supported in part by the ‘DARPA Max0
0
0
5
10
15
20
25
30
35
40
45
50
imum Mobility and Manipulation
Time (s) Program’. Jongwoo Lee
was supported by the Samsung Scholarship.
R EFERENCES
[1] K. Byl, Metastable Legged-Robot Locomotion. PhD thesis, MIT, 2008.
[2] A. Shkolnik, M. Levashov, I. R. Manchester, and R. Tedrake, “Bounding on rough terrain with the LittleDog robot,” The International
Journal of Robotics Research, vol. 30, no. 2, pp. 192–215, 2011.
[3] M. Raibert, K. Blankespoor, G. Nelson, R. Playter and BigDog
Team, “Bigdog, the rough-terrain quadruped robot,” in Proceedings of
the 17th World Congress The International Federation of Automatic
Control (IFAC), 2008.
[4] Y. Fukuoka, H. Kimura, and A. H. Cohen, “Adaptive dynamic walking
of a quadruped robot on irregular terrain based on biological concepts,”
The International Journal of Robotics Research, vol. 22, no. 3-4,
pp. 187–202, 2003.
[5] Boston Dynamics, “Introducing wildcat,” October 2013. http://
www.youtube.com/watch?v=wE3fmFTtP9g.
[6] R. Alexander and A. Jayes, “A dynamic similarity hypothesis for the
gaits of quadrupedal mammals,” Journal of Zoology, vol. 201, no. 1,
pp. 135–152, 1983.
[7] A. Spröwitz, A. Tuleu, M. Vespignani, M. Ajallooeian, E. Badri, and
A. J. Ijspeert, “Towards dynamic trot gait locomotion: Design, control,
and experiments with cheetah-cub, a compliant quadruped robot,” The
International Journal of Robotics Research, vol. 0, pp. 1–19, 2013.
[8] L. D. Maes, M. Herbin, R. hacker, V. L. Bels, and A. Abourachid,
“Steady locomotion in dogs: temporal and associated spatial coordination patterns and the effect of speed,” The Journal of Experimental
Biology, vol. 211, pp. 138–149, 2008.
[9] R. Blickhan, H. Wagner, and A. Seyfarth, “Brain or muscles?,” Recent
research developments in biomechanics, vol. 1, pp. 215–245, 2003.
[10] R. Blickhan, “The spring-mass model for running and hopping,”
Journal of Biomechanics, vol. 22, no. 1112, pp. 1217 – 1227, 1989.
[11] R. Ringrose, “Self-stabilizing running,” in Robotics and Automation,
1997. Proceedings., 1997 IEEE International Conference on, vol. 1,
pp. 487–493, 1997.
[12] T. Kubow and R. Full, “The role of the mechanical system in control:
a hypothesis of self–stabilization in hexapedal runners,” Philosophical
Transactions of the Royal Society of London. Series B: Biological
Sciences, vol. 354, no. 1385, pp. 849–861, 1999.
[13] I. Poulakakis, E. Papadopoulos, and M. Buehler, “On the stability of
the passive dynamics of quadrupedal running with a bounding gait,”
The International Journal of Robotics Research, vol. 25, pp. 669–687,
2006.
[14] N. Hogan, “Impedance control-an approach to manipulation. part I
- part III,” ASME Transactions Journal of Dynamic Systems and
Measurement Control B, vol. 107, pp. 1–24, 1985.
[15] D. J. Hyun, S. Seok, J. Lee, and S. Kim, “High speed trotrunning: Implementation of a hierarchical controller using proprioceptive impedance control on the MIT cheetah.” The International
Journal of Robotics Research, to be published.
[16] R. Ghigliazza, R. Altendorfer, P. Holmes, and D. Koditschek, “A simply stabilized running model,” SIAM Journal on Applied Dynamical
Systems, vol. 2, no. 2, pp. 187–218, 2003.
[17] C. D. Remy, Optimal exploitation of natural dynamics in legged
locomotion. PhD thesis, ETH, 2011.
[18] A. Goswami, B. Thuilot, and B. Espiau, “A study of the passive gait
of a compass-like biped robot symmetry and chaos,” The International
Journal of Robotics Research, vol. 17, no. 12, pp. 1282–1301, 1998.
[19] A. Witkin, M. Gleicher, and W. Welch, Interactive dynamics, vol. 24.
ACM, 1990.
[20] D. Baraff, “Linear-time dynamics using lagrange multipliers,” in
Proceedings of the 23rd annual conference on Computer graphics and
interactive techniques, pp. 137–146, ACM, 1996.
[21] Hurmuzlu, Yildirim, and D. B. Marghitu, “Rigid body collisions of
planar kinematic chains with multiple contact points,” The International Journal of Robotics Research, vol. 13.1, pp. 82–92, 1994.
[22] J. Lee, “Hierarchical controller for highly dynamic locomotion utilizing pattern modulation and impedance control: implementation on the
MIT cheetah robot,” Master’s thesis, MIT, 2013.
[23] S. Grillner and P. Wallen, “Central pattern generators for locomotion,
with special reference to vertebrates,” Annual review of neuroscience,
vol. 8, no. 1, pp. 233–261, 1985.
[24] E. Bizzi, N. Hogan, F. A. Mussa-Ivaldi, and S. Giszter, “Does the
nervous system use equilibrium-point control to guide single and
multiple joint movements?,” Behavioral and Brain Sciences, vol. 15,
no. 04, pp. 603–613, 1992.
[25] T. McMahon, “The role of compliance in mammalian running gaits,”
Journal of Experimental Biology, vol. 115, no. 1, pp. 263–282, 1985.
[26] M. Gross, J. Rummel, and A. Seyfarth, “Stability in trotting dogs,”
2009. Poster presented at the Adaptive motion in man, animals, and
machines, Feb 19 – 20, Friedrich-Schiller-Universität, Jena, Germany.
[27] R. Blickhan and R. Full, “Similarity in multi legged locomotion:
Bouncing like a monopode,” Journal of Comparative Physiology A,
vol. 173, pp. 509–517, 1993.
[28] S. Seok, A. Wang, D. Otten, and S. Kim, “Actuator design for high
force proprioceptive control in fast legged locomotion,” in Intelligent
Robots and Systems (IROS), 2012 IEEE/RSJ International Conference
on, pp. 1970–1975, IEEE, 2012.
[29] Y. Hurmuzlu, F. Génot, and B. Brogliato, “Modeling, stability and
control of biped robots-a general framework,” Automatica, vol. 40,
no. 10, pp. 1647–1664, 2004.
[30] R. D. Gregg, Y. Y. Dhaher, A. Degani, and K. M. Lynch, “On the
mechanics of functional asymmetry in bipedal walking,” Biomedical
Engineering, IEEE Tran., vol. 59, no. 5, pp. 1310–1318, 2012.
[31] P. Bergé, Y. Pomeau, C. Vidal, and L. Tuckerman, Order within chaos:
towards a deterministic approach to turbulence. Wiley New York,
1986.
[32] R. Hilborn, Chaos and nonlinear dynamics: an introduction for
scientists and engineers. oxford university press, 2000.