A Stiffness-Adjustable Hyperredundant Manipulator Using
advertisement

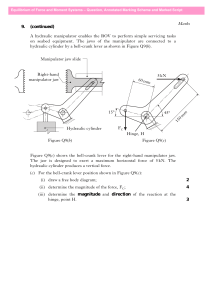
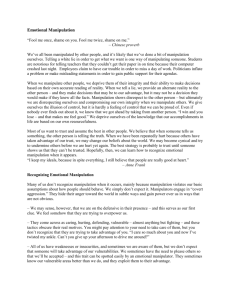
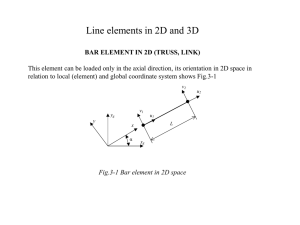
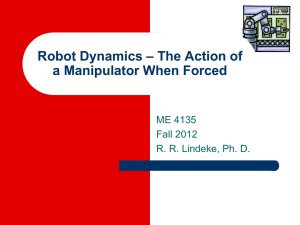
A Stiffness-Adjustable Hyperredundant Manipulator Using a Variable Neutral-Line Mechanism for Minimally Invasive Surgery The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Kim, Yong-Jae, Shanbao Cheng, Sangbae Kim, and Karl Iagnemma. “A Stiffness-Adjustable Hyperredundant Manipulator Using a Variable Neutral-Line Mechanism for Minimally Invasive Surgery.” IEEE Transactions on Robotics 30, no. 2 (April 2014): 382–395. As Published http://dx.doi.org/10.1109/tro.2013.2287975 Publisher Institute of Electrical and Electronics Engineers (IEEE) Version Author's final manuscript Accessed Mon May 23 11:08:33 EDT 2016 Citable Link http://hdl.handle.net/1721.1/98275 Terms of Use Creative Commons Attribution-Noncommercial-Share Alike Detailed Terms http://creativecommons.org/licenses/by-nc-sa/4.0/ A Stiffness-Adjustable Hyper-Redundant Manipulator using a Variable Neutral-line Mechanism for Minimally Invasive Surgery Yong-Jae Kim, Shanbao Cheng, Sangbae Kim, and Karl Iagnemma Abstract— In robotic single port surgery, it is desirable for a manipulator to exhibit the property of variable stiffness. Small port incisions may require both high flexibility of the manipulator for safety purposes, and high structural stiffness for operational precision and high payload capability. This paper presents a new hyper-redundant tubular manipulator with a variable neutral-line mechanisms and adjustable stiffness. A unique asymmetric arrangement of the tendons and the links realizes both articulation of the manipulator and continuous stiffness modulation. This asymmetric motion of the manipulator is compensated by a novel actuation mechanism without affecting its structural stiffness. The paper describes the basic mechanics of the variable neutral-line manipulator, and its stiffness characteristics. Simulation and experimental results verify the performance of the proposed mechanism. Index Terms - Variable neutral-line mechanism, snake–like manipulator, adjustable stiffness, medical robot. (a) I. INTRODUCTION S NAKE-like manipulators have unique characteristics and advantages such as flexibility, safety, dexterity, and potential for minimization. Most snake-like manipulators can be roughly categorized into flexible manipulators and (b) hyper-redundant manipulators. Trunk and tentacle-like Fig.1. (a) 4-DOF variable neutral-line manipulator and actuation system, devices made from soft materials belong to the flexible (b) Single-port surgical system using the variable neutral-line manipulator category [1, 2, 3, 4] and they have inherent manipulator passive compliance, which is one of the great advantages of schemes. This compliance is caused by flexibility of the these manipulators. On the other hand, hyper-redundant structural material, or deformable components in the manipulators [5, 6, 7] are composed of many rigid links and mechanism. Because the compliance is determined by the joints, which can be actuated by embedded motors as in [7], material stiffness and the pose of the manipulators [2, 8], the or, by external actuators and transmission components such stiffness remains fixed if the pose is determined. as tendons or flexible shafts [5, 6]. Most of the externally Recently, snake-like manipulators are receiving high actuated hyper-redundant manipulators have an under actuated property, and thus they also exhibit passive attention due to rising research interest in minimally invasive surgery (MIS) and natural orifice translumenal compliance like flexible manipulators. Passive compliance is useful for safe manipulation of endoscopic surgery (NOTES) [9, 10, 11]. MIS and NOTES unknown or delicate objects, human-robot interaction, and have huge advantages including low trauma, fast healing and multi-arm cooperation without complex force-feedback minimal or no scarring. Snake-like devices are well suited for accessing deep inside of the patient’s abdominal cavity Manuscript received March 10, 2012. This work was supported in part through a small entry point, while today’s rigid (and by SAIT of Samsung Electronics. typically straight) tools have difficultly achieving such Y.J. Kim is with Samsung Advanced Institute of Technology, Ki-hung access. However, the fixed stiffness of snake-like devices gu, Yong-in si., Kyunggi do, Rep. of Korea. (corresponding author to provide phone: +82-31-280-1528, e-mail: yj424.kim@samsung.com) hinder their ability to achieve high stiffness for high payload S. Cheng is with the Ellipse Technologies, Irvine, CA, 92618, USA operation and exact positioning, and low stiffness for safe (phone:+1-585-643-4095; e-mail: chengshanbao@gmail.com). movement without harming internal organs [12, 13]. In order S. Kim and K. Iagnemma are with Massachusetts Institute of Technology (MIT), Cambridge, MA, 02139, USA (phone: to overcome this drawback, various stiffening mechanisms +1-617-452-2711, e-mail: sangbae@mit.edu and phone: +1-617-452-3262, have been developed. One popular approach relies on the e-mail: kdi@mit.edu) use of wire tension and friction between rigid links [5, 14]. 1 Length invariant neutral-line Flexible backbone or pivots and springs θ F − Δl + Δl + Δl − Δl w + Δl − Δl (a) (b) (c) Fig.2. One dimensional illustration of traditional snake-like manipulators However, the wire tension must be very high, and thus the links must be strong enough to endure high tension, since the stiffening force arises solely from the friction between the links. Moreover, the links can occupy substantial space, and thus it is difficult to create a compact manipulator that also allows passage of miniaturized surgical tools (e.g. one with a large hollow space at the center). Recent research has focused on the use of tunable-stiffness materials, including field-activated materials like magnetorheological (MR) or electrorheological (ER) fluids [15, 16]. These technologies are promising for precise control of damping, and are mostly used in active damping mechanisms such as tunable automotive suspensions. However, there are limitations in their achievable range of the elastic modulus, or yield strength, when they are activated. Thermally activated materials such as wax or solder can also be used as tunable-stiffness elements to create locking mechanisms in soft robotic applications [17, 18]. However, achieving tunable stiffness with these materials requires long activation times (typically on the order of seconds). Particle jamming technology using granular media has also recently been researched as another way to achieve tunable stiffness [19, 20]. Particle jamming has interesting features including high deformability in its fluid-like state, and drastic stiffness increase in its solid-like state, without significant change in volume, but it requires substantial volume to achieve sufficient stiffness. In order to overcome this problem, reduced dimensional jamming approaches, such as layer jamming of thin frictional flaps of material, have been investigated and exhibited drastic stiffness changes within a small volume [21,22]. To overcome the drawbacks of previous methods, we propose a new snake-like mechanism, named a variable neutral-line mechanism as shown in Fig.1, whose stiffness can be changed continuously, even while in motion. Although it is also composed of rigid links and actuated by tendons, its unique joint mechanism and actuation system make stiffness control possible by varying the tension of the tendons. Its simple, thin, and hollow structure (top left of Fig.1(a)) is suitable for surgical application such as MIS or NOTES, because it can be used as a flexible guide tube through which multiple miniaturized surgical tools such as endoscopes and surgical instruments can be inserted. Fig.1(b) shows a single port surgical system which is composed of dual 7-DOF instruments and one 3-DOF endoscopic device mounted at the end of a guide tube made by the two identical 2-DOF variable neutral-line manipulators. In aid of the rotation and insertion motion of the mounting system, the guide tube has in total 6-DOF, which means that the guide tube can place the dual instruments and the endoscope at arbitrary position in the abdominal cavity with an arbitrary approach direction. Then, the human-like configuration of the instruments and the endoscope can provide an intuitive teleoperational environment for a surgeon. Due to dexterity and adjustable stiffness of the variable neutral-line manipulator, extremely difficult surgeries using a single port (such as lower anterior resection or partial nephrectomy) can be performed significantly more easily and safely. The paper is structured as follows. In Section II, we introduce the basic mechanics of the proposed manipulator without external forces, and then, in Section III, we exhaustively investigate the deflection shape under an external force. Based on this, Section IV derives important stiffness properties of the variable neutral-line manipulator. Section V presents an actuation system that can control both of the bending angle and the stiffness of the manipulator independently. Section VI validates the stiffness model through experiments. Section VII discusses key design parameters related to the stiffness, and suggests several useful design variations without losing the advantage of the proposed mechanism, and this is followed by the paper's conclusion. II. BASIC MECHANICS OF VARIABLE NEUTRAL-LINE MANIPULATOR A one-dimensional concept of a traditional snake-like manipulator is shown in Fig.2. This structure is composed of a flexible backbone at the center with evenly placed disks (the proximal part of Fig.2(a)) [1], or multiple links with pivots at their centers, with springs fixed around them (the distal part of Fig.2(a)) [6]. They are actuated by a pair of wires placed at an equal distance from the center. Fig.2(a) illustrates an example of the bent pose when the left-side wire is pulled and the other is loosened. If we assume that the compression of the backbone (or pivot mechanism) is negligible compared to bending, the length of the centerline is invariant. The relationship between amount of the movement of the right and left wires, bending angle of the manipulator, as follows: Δl r = − Δll = w θ. 2 θ Δl r and Δl l , and the , can be easily obtained (1) 2 where w denotes the width between the left and right wires. This equation shows that the left and right wires have the same magnitude and opposite direction. This symmetric movement of wires provides an under actuated mode that introduces passive compliance, as mentioned in the previous section. When we consider a situation where the wires are fixed at a straight pose, as in Fig.2(b), and an external force is applied to the lateral direction at the end of the manipulator, it tends to bend easily into to an s-shape regardless of wire tension, as shown in Fig.2(c). This is because the manipulator can be moved to various configurations without changing the wire length. Therefore, the manipulator stiffness to resist bending comes solely from the fixed stiffness of the flexible backbone, or the springs, and not from wire tension. Length invariant neutral-line θ F Δl − A. 1 DOF Variable Neutral-line Manipulator Δl + Δl + Δl − w Δlr Tension Δl − + Δl + > 0 − Δll Tension (a) (b) (c) Fig.3 1-dimensional concept of the variable neutral-line manipulator Δφ d r ( Δφ ) Δφ + α d l ( Δφ ) w r − r cos(α + Δφ ) (a) From the geometry of each joint, the relationship between the bending angle of the manipulator and the movement of the wires can be derived. If we assume that there is no external force, the bending shape will be arc shapes, as in Fig.3(a). Let us define n and Δφ as the number of joints (not links), and the bending angle of one joint with respect to the proximal link. As already defined, θ is the bending angle of the manipulator tip, and as the manipulator has an arc shape, we know that θ = nΔφ . Fig.4 illustrates a close-up view of the rolling joint, where r α implies that proper tension of the wires dictates the force maintaining the shape of the manipulator. (A detailed analysis of the relationship between wire tension and stiffness of the manipulator will be investigated in Section III and IV.) In contrast to traditional snake-like manipulators, the location of the length invariant neutral-line shown in Fig.3 is not fixed at the center. In mechanics, neutral-line (or neutral surface) denotes a conceptual line within a beam or cantilever, where the there is no compression or tension and thus the length does not change. As the position of the neutral-line varies according to the pose of the proposed mechanism, this device is termed a variable neutral-line manipulator. The contact surface of the joint does not need to have a circular shape. Many other asymmetric joints can produce the variable stiffness property, but we will here focus on cylindrical rolling joint for simplicity, and discuss other possibilities briefly in Section VII. In the remaining part of this section, the basic mechanics and the asymmetric property in the situation of no external forces are described. (b) Fig.4 Close-up view of the 1-dimensional rolling joint Moreover, in order to obtain higher stiffness, stiffer materials must be used and, accordingly, a higher wire tension is needed to overcome the stiffness of the backbone or springs, which can lead to a reduction of available drive actuator force and a larger required wire diameter . On the other hand, if asymmetric movement of the wire pair can be achieved, the stiffness of the manipulator can be a function of the wire tension. Fig.3 shows an example of an asymmetric mechanism. This mechanism employs self-similar links with rolling joints, instead of pivots or a backbone, where the joint has arc-shape contact surfaces. When it bends similar to Fig.3(a), movement of the loosened wire Δlr is longer than that of pulled wire Δl l , which leads to asymmetric behavior. When a lateral force is applied, as shown in Fig.3(c), the total movement of the wires Δl − + Δl + has a positive value. This is important, since it r , w , α , d l and d r represent the radius of contact surface, the width between the left and right wires, half of the contact angle, and local length of the left and right wires, respectively. From Fig.4(b), d l and d r can be calculated as follows: Δφ ⎞ ⎛ d l ( Δφ ) = 2r ⎜1 − cos(α − ) ⎟ 2 ⎠ ⎝ Δφ ⎞ ⎛ d r ( Δφ ) = 2r ⎜1 − cos(α + ) ⎟ 2 ⎠ ⎝ (2) Therefore, the movements of the left and right wires, Δd l and Δd r , are Δφ ⎞ ⎛ Δd l ( Δφ ) ≡ d l ( Δφ ) − d l (0) = 2r ⎜ cos α − cos(α − ) ⎟ 2 ⎠ ⎝ Δφ ⎞ ⎛ Δd r ( Δφ ) ≡ d r ( Δφ ) − d r (0) = 2r ⎜ cosα − cos(α + ) ⎟ 2 ⎠ ⎝ (3) Consequently, the relationship between θ and the overall length change of the left and right wire, Δl l and Δlr , without any external force, can be obtained as (4). Here we can notice that the sum of the length change is nonzero. 3 θ ⎞ ⎛ Δll (θ ) = nΔd l = 2nr ⎜ cosα − cos(α − ) ⎟ 2n ⎠ ⎝ θ ⎞ ⎛ Δlr (θ ) = nΔd r = 2nr ⎜ cosα − cos(α + ) ⎟ 2 n ⎠ ⎝ (4) B. 2 DOF Variable Neutral-line Manipulator Fig.5 illustrates a diagram of a 2-degree of freedom manipulator. Each link shown in Fig.5(a) has two cylindrical contact surfaces, oriented orthogonally to each other. At the center of the link there is a large hole, which distinguishes the device structurally from many other snake-like manipulators. The contact surfaces between adjacent links form rolling joints, and they are alternately placed at orthogonal directions to each other as shown in Fig.5(b) and (c). In order to prevent slip between the rolling surfaces, flexures can be used which will be described in Sect V and Fig.14(b). In the case of the 2-DOF manipulator, as shown in Fig.6(b), there are two wire pairs, and the motion of the two pairs affects each other. In other words, when the manipulator is deflected by one wire pair’s motion, the other wires placed at the center of links (the red line in Fig.6(b)) are also pulled. Let us call the horizontal motion and vertical motion in Fig.6(a) pan motion and tilt motion, respectively, and let the corresponding wire pairs be called the pan wire pair and tilt wire pair. The manipulator has the same number of links n for each pan motion and tilt motion. Also, Δ φ p and Δφt denote bending angles for pan motion and tilt motion of a joint, and Δd pl , Δd pr , Δd tl and Δd tr denote displacements of the lengths of the pan wire pair and tilt wire pair of a joint, respectively. In a similar way as (3), the displacement of the pan wires can be calculated as follows: contributes to the movement of the pan wires. It can be derived from the diagram of the rolling joint in Fig.6(b). In a similar way as (4), the relationship between the angle of the end effector and the length change of the pan wires can be obtained as: θ ⎛ θ ⎞ Δl pl (θ p ,θt ) = 2nr ⎜⎜ cosα − cos(α − p ) + 1 − cos t ⎟⎟ 2 n 2 n ⎠ ⎝ θ ⎛ θ ⎞ (6) Δl pr (θ p ,θ t ) = 2nr ⎜⎜ cosα − cos(α + p ) + 1 − cos t ⎟⎟ 2 n 2 n ⎠ ⎝ where Δl pl , Δ l pr , θ p and θ t denote the overall displacement of the left pan wire and right pan wire, and the components of the end effector tip angle in the directions of pan motion and tilt motion, respectively. These equations are valid when an external force does not exist, and the bending angle of each joint has the same angle. The relationship between the angle of the end effector and the length change of the tilt wires also can be calculated in the same way. III. DEFLECTION CHARACTERISTICS UNDER EXTERNAL FORCE In order to show that the stiffness of the manipulator is controllable by changing the wire tension, the bending shape of the manipulator under an external force will be calculated. In this paper, small deflections about the straight pose will be considered. The deflection diagrams (such as Fig.3(c) and Fig.7(a)) show an exaggerated shape for ease in explanation. Since we assume that the manipulator links are rigid, an axial force applied to the tip while at a straight pose causes no effect, and thus only lateral forces cause deflection. Analysis of the manipulator stiffness under an arbitrary bending angle, and the effect of moment loading at the end effector, are both beyond the scope of this paper. Therefore, we will focus on analysis of manipulator deflection when subject to a lateral force. Let us start with analysis of a 1-DOF manipulator. As shown in Fig.7(a), the amount of lateral motion d generated by a lateral force in the y direction is: n d = ∑ l sin φi (7) i =1 Fig.5. 2-dimensional concept of the variable neutral-line manipulator Δφ p ⎛ Δφ ⎞ Δd pl ( Δφ p , Δφt ) = 2r⎜⎜ cosα − cos(α − ) + 1 − cos t ⎟⎟ 2 2 ⎠ ⎝ Δ φ ⎛ Δφ ⎞ Δd pr ( Δφ p , Δφt ) = 2r ⎜⎜ cosα − cos(α + p ) + 1 − cos t ⎟⎟ 2 2 ⎠ ⎝ (5) The term 1 − cos(Δφt / 2) in (5) implies that the tilt motion 4 subject to an external force, and thus angle φi in each link is different from each other. Thus, Δll and Δlr should be calculated by summing the displacement of the wires of each link using (3). n n Δφ ⎞ ⎛ Δll = ∑ Δd l ( Δφi ) = ∑ 2r ⎜ cos α − cos(α − i ) ⎟ 2 ⎠ ⎝ i =1 i =1 n n Δ φ ⎞ ⎛ (10) Δl r = ∑ Δd r ( Δφi ) = ∑ 2r ⎜ cos α − cos(α + i ) ⎟ 2 ⎠ ⎝ i =1 i =1 where Δφi = φi − φi −1 , φ0 = 0 and φn = 0 . If we substitute (10) into (8) we find: n Δφ ⎞ n ⎛ Δφ ⎞ ⎛ ∑ 2r⎜ cosα − cos(α − i ) ⎟ = ∑ 2r⎜ cosα − cos(α + i ) ⎟ 2 ⎠ i =1 ⎝ 2 ⎠ ⎝ Δφi Δφi ⎞ n ⎛ Δφ ⎞ ⎛ ) − cos(α − ) ⎟ = ∑ ⎜ − 2 sin(α ) sin( i ) ⎟ = 0 ⎜ cos(α + ∑ 2 2 2 ⎠ ⎠ i =1 ⎝ i =1 ⎝ Because sin α is nonzero, (8) is reduced to i =1 n n ∑ sin( i =1 Fig.6. (a) Pan motion and Tilt motion (b) Close-up view of tilting surface of 2-dimensional variable neutral-line manipulator y y Lateral force l φn −1 φn = 0 d φ3 φ3 φ2 φ1 φ1 (a) x φ2 d 2 (b) x Fig.7. Deflection model of the straight pose 1-DOF manipulator under a lateral force where l , n and φi denote the length of the links, number of th joints and the bending angle of the i joint with respect to the x axis. Note that φn is always zero. In the case of large deflections, the joints move differently from ordinary revolute joints, however since we only consider small motion, we approximate them as revolute joints. As the two wires are pulled to maintain a straight pose (refer to Fig.3(c)), the movements of the left and right wires are the same, i.e. Δll = Δlr . (8) The objective is to find the pose of the manipulator under lateral motion that minimizes the change of length of the wires. Therefore the problem is to find the set of φi as follows: arg min(Δll + Δlr ) (9) φ where φ denotes the set of φi , and thus it represents the deflected pose of the manipulator. Δll and Δlr in (8) and (9) have different values than in (4) because the manipulator is Δφi ) = 0. 2 (11) Also, the cost function Δll + Δlr in (9) can be simplified (using (10)) as n Δφ Δφ ⎞ ⎛ Δll + Δlr = 4nr cos α − ∑ 2r ⎜ cos(α + i ) + cos(α − i ) ⎟ 2 2 ⎠ (12) ⎝ i =1 n Δφ = 4nr cos α − 4r cos α ∑ cos( i ) 2 i =1 Thus the minimization problem (9) can be rewritten by a maximization problem. Consequently, we can obtain the optimization problem of (13) with the two constraints (7) and (11) as follows: Δφ ⎞ ⎛ n arg max ⎜ ∑ cos( i ) ⎟ 2 ⎠ φ ⎝ i =1 (13) such that n ∑ sin φ i i =1 = d and l n ∑ sin( i =1 Δφi ) = 0. 2 For a more simplified formulation, it is worthwhile to consider the geometric property of a tendon-supported structure under lateral forces. The lateral force as shown in Fig.7(a) generates a torque, or moment, at the proximal end of the manipulator, and the wire pair delivers the same amount of torque to the distal end [2]. As a result, the manipulator deflects into a symmetric s-shape, because the same amount of torque is applied at each end. Exploiting this property, the problem can be represented by half of the joint configuration of the manipulator, as shown in Fig.7(b). This symmetric property can eliminate the constraint of (11), because the equality of the displacement of both wires (8) is Δφ φ i is the change of i as shown in automatically satisfied. Equation 10, and its sign could be either positive or negative depending on its location. For example, in Fig.7(a), the lower half of the manipulator will always have positive Δφi , while the upper half will have negative Δφi . 5 A. Analysis of Manipulators with Odd Number of Joints Therefore, in the case of an odd number of joints, the optimization function (13) and constraint (7) are rewritten as: where we call the m + 1 by m + 1 matrix on the left side A , and the m + 1 vector on the right side c . In the case of 3-joint manipulators (i.e. n = 3 ), A and c are: m −1 Δφ Δφ ⎞ ⎛ 1 arg max ⎜ cos( m ) + ∑ cos( i ) ⎟ 2 2 ⎠ φ i =1 ⎝ 2 A n =3 (14) such that m −1 ∑ sin φ i i =1 (15) where Δφi = φi − φi −1 , ⎡φ ⎤ −1 ⎢λ ⎥ = A c ⎣ ⎦ φ0 = 0 and m = (n + 1) / 2 . Due to the assumption of small deflections, the trigonometric function in (14) and (15) can be approximated using a Taylor series expansion, as m −1 m −1 1 Δφ Δφ 1 ⎛ 1 ⎛ 1 2 ⎞ 2 ⎞ cos( m ) + ∑ cos( i ) = ⎜1 − Δφm ⎟ + ∑ ⎜1 − Δφi ⎟ 2 2 i =1 2 2 ⎝ 8 ⎠ i =1 ⎝ 8 ⎠ m −1 1 ⎞ 1 ⎛ 1 ⎛ 2 2 ⎞ = ⎜ m − ⎟ − ⎜ Δφm + ∑ Δφi ⎟ 2 8 2 ⎝ ⎠ i =1 ⎝ ⎠ ∑ sin φi = ∑ i =1 4 In order to solve this approximate optimization problem, the method of Lagrange multipliers is applied. The Lagrange function is defined as: (16) Λ(φ ) = f (φ ) + λg (φ ) where f (φ ) = m −1 1 ⎛ m ⎞ d 2 2 Δφm + ∑ Δφi , g (φ ) = ⎜ ∑φi ⎟ − 2 i =1 ⎝ i =1 ⎠ 2l λ is a Lagrange multiplier. f (φ ) again represents the minimization function, because the sign is changed during approximation. Differentiating (16), the following necessary conditions for the solution are obtained. 4φi − 2φi +1 + λ = 0, i =1 ⎧ ⎪− 2φ + 4φ − 2φ + λ = 0, 1 < i < m − 1 (17) ∂Λ (φ ) ⎪ i −1 i i +1 = ⎨ − 2 φ + 3 φ − φ i = m −1 ∂φi i − 1 i i + 1 + λ = 0, ⎪ ⎪⎩ − φi −1 + φi = 0, i=m ∂Λ (φ ) m−1 d = ∑ φi − = 0 ∂λ 2 l i =1 These can be expressed in matrix form as 1⎤ ⎡ 4 − 2 ⎢ − 2 4 − 2 1⎥ ⎢ ⎥ −2 4 −2 1⎥ ⎢ ⎡ 0m ×1 ⎤ ⎢ ⎥ " " " ! ⎥ ⎡φm ×1 ⎤ ⎢ ⎥ ⎢ = ⎢ ⎥ ⎣d / 2l ⎦ ⎢ − 2 3 − 1 1⎥ ⎣ λ ⎦ ≡c ⎢ ⎥ − 1 1 0⎥ ⎢ ⎢⎣ 1 1 1 ... 1 0 0⎥⎦ ≡A (19) n=6 4 5 4.5 3 3 2 2 4 1 1 3.5 0 0 y5 20 40 60 80 0 x 0 3 2 2 60 80 x n = 30 4 3 40 2 20 40 60 80 x 0 n=3 n=6 n = 10 n = 30 1.5 1 0.5 1 0 3 2.5 y5 n = 10 20 0 20 40 60 80 x 0 0 10 20 30 40 (a) i =1 and 5 n=3 0 φi . y 5.5 y 5 1 m . (21) y 4 and m ⎡ 0 ⎤ c = ⎢ 0 ⎥ ⎢ ⎥ ⎢⎣d / 2l ⎥⎦ and (20) As a result, the deflected pose (i.e. the set of φi ) can be obtained from the following equation. d 2l = ⎡ 3 − 1 1⎤ = ⎢− 1 1 0⎥ ⎢ ⎥ 0 0⎥⎦ ⎢⎣ 1 (18) 50 60 70 80 90 x (b) Fig.8. Deflected shapes of simulated manipulators B. Analysis of Manipulators with Even Number of Joints Until now, we have considered the case of manipulators with an odd number of joints. In the case of an even number of joints, the symmetric property can be used similarly, if we take into account that the distal link of the simplified model has half the size of the other links. In a similar derivation as (14) and (15), the optimization problem for a manipulator with an even number of joints is: Δφ ⎞ ⎛ m arg max ⎜ ∑ cos( i ) ⎟ 2 ⎠ φ ⎝ i =1 (22) such that m −1 1 d sin φm + ∑ sin φi = 2 2l i =1 (23) where Δφi = φi − φi −1 , φ0 = 0 and m = n / 2 . The equation (21) can be used to find a solution for an even number of joints, where the matrix A takes on unique values, as: 1 ⎤ ⎡ 4 − 2 ⎢ − 2 4 − 2 1 ⎥ ⎢ ⎥ # # # " ⎥ ⎢ A even links = ⎢ ⎥ − 2 4 − 2 1 ⎥ ⎢ ⎢ − 2 − 2 1 / 2⎥ ⎢ ⎥ 1 ! 1 1 / 2 0 ⎦ ⎣ 1 (24) In the case of 4-joint manipulators (i.e. n = 4 ), A is: 6 A n =4 Table I ⎡ 4 − 2 1 ⎤ = ⎢− 2 − 2 1 / 2⎥ . ⎢ ⎥ ⎢⎣ 1 1 / 2 0 ⎥⎦ DESIGN-INDEPENDENT STIFFNESS COEFFICIENT n In the case of 2-joint manipulators (i.e. n = 2 ), the set of φi can be directly calculated from (7) as φ1 ≅ d / l and φ2 = 0 . Fig.8 shows the deflected shapes of various simulated manipulators according to their number of links. The length of the manipulator nl , radius of contact surface r , half of the contact surface angle α , and amount of the lateral displacement d are 87mm, 14.8mm, 33.18deg and 5mm, respectively. C. 2-DOF Analysis considered. Let us consider a situation of a 2-DOF manipulator where the external force in the pan direction results in a deflecting motion in the same direction. Then, the displacements of pan wires are the same as (10) because the tilt angle of each joint is zero. However, the displacements of the tilt wires are nonzero due to the coupling term, as follows n Δφ ⎞ n ⎛ Δφ ⎞ ⎛ Δφ Δltl = ∑ 2r⎜⎜ cosα − cos(α − ti ) + 1 − cos pi ⎟⎟ =∑ 2r⎜⎜1 − cos pi ⎟⎟ 2 2 2 ⎠ i =1 ⎝ ⎠ i =1 ⎝ n n Δφ ⎞ Δφ ⎞ ⎛ ⎛ Δφ Δltr = ∑ 2r ⎜⎜ cosα − cos(α + ti ) + 1 − cos pi ⎟⎟ =∑ 2r ⎜⎜1 − cos pi ⎟⎟ 2 2 ⎠ i =1 ⎝ 2 ⎠ i =1 ⎝ (25) denote displacements of the left and right tilt wires and the pan and tilt angle of i th link, respectively, and Δφti is zero because there is no tilt motion. Here, the objective is to find the pose of the manipulator (i.e. the set of φ pi ) when subjected to lateral loading that minimizes the change of lengths of the tilt wires as well as that of the pan wires. If we consider the minimization problem for only the tilt wires: arg min(Δltl + Δltr ) 4 5 6 10 30 ∞ 16.00 13.50 12.80 12.50 12.34 12.12 12.01 12.00 Tension to tilt wires Tension to pan wires T F T External force 2-DOF manipulator IV. STIFFNESS OF THE VARIABLE NEUTRAL-LINE MANIPULATOR In this section, the relationship between the stiffness of the manipulator and the wire tension is calculated by using the deflected shape obtained in the previous section. Fig.9 shows a schematic of the wire tensions and force exerted on the manipulator, where the same tension T is applied to the pan wires and tilt wires individually, and F is the external lateral force applied to the end effector. The tensioning mechanism is highly simplified here, and the detailed structure will be described in Section V. For clarity of the stiffness calculations, let us first define several terms. In (21), only c contains design parameters l and d . Thus, we can cancel out these design parameters by defining the following variable: si = nl h φi = φi d d (28) where h = nl and can be considered as the total length of the manipulator. The set of si can be calculated by substituting φi in (21) with (28), i.e. ⎡ si m×1 ⎤ −1 ⎡ 0m×1 ⎤ ⎢ ⎥ = A ⎢n / 2⎥ ⎣ ⎦ ⎣ λ ⎦ φp (26) From (25) and (26), the optimization problem is rewritten as Δφ pi ⎞ ⎛ n arg max ⎜⎜ ∑ cos( ) ⎟ 2 ⎟⎠ φp ⎝ i =1 3 Fig.9. A schematic of tensions and force exerted in a In order to extend these analyses to a 2-DOF manipulator, the coupling term 1 − cos(Δφt / 2) in (5) should be where Δltl , Δl tr , Δφ pi and Δφti Sn 2 . (27) Note that (27) for the tilt wires has exactly the same cost function as that of the pan wires (13). This is important because it implies that displacing the tilt wires under lateral loading produces the same deflected pose as displacing the pan wires. It also means that (13) represents the optimization problem for the 2-DOF manipulator. Therefore, the deflected shape obtained from (21) can be applied directly to the 2-DOF manipulator. (29) which shows that si is a design-independent constant related only to the number of the joints n . Using this relationship, we can define another constant: n Sn ≡ n ∑ Δsi 2 i =1 (30) where Δsi = si − si −1 , s0 = 0 . The values of S n shown in Table I were calculated by using (29) and (30) for each case of n . They are also design-independent parameters only related to n , regardless of the link length l , radius of contact surface r , or half of the contact surface angle α . 7 Now it is possible to derive the stiffness of the variable neutral-line manipulator. From (12), the displacement of the pan wires Δl p can be expressed as follows: Δl p ≡ Δl pl = Δl pr = ( Δl pl + Δl pr ) / 2 n Δφi ) 2 i =1 n ⎛ 1 2 ⎞ r cosα n 2 ≅ 2nr cosα − 2r cosα ∑ ⎜1 − Δφi ⎟ = Δφi . (31) ∑ 8 4 ⎠ i =1 ⎝ i =1 By substituting (28)-(30) into (31), the relationship between d and Δl p can be calculated as = 2nr cos α − 2r cos α ∑ cos( Δl p = 2 ⎞ r cos α n ⎛⎜ ⎛ d ⎞ r cos α 2 . 2 Δsi ⎟ = Sn d ⎜ ⎟ ∑ ⎟ 4 i =1 ⎜⎝ ⎝ h ⎠ 4nh 2 ⎠ ) N ( 25 e c r o F (32) ) N ( 2.5 e c r o F y = 0.481x 2 20 y = 0.374x 15 1.5 10 1 5 Tension 20N Tension 33.1N Tension 46.5N 0.5 Tension 59.9N y = 0.266x 0 0 10 20 30 40 (a) Displacement (mm) 50 60 0 y = 0.1611x 0 1 2 3 (b) 4 5 6 Displacement (mm) Fig.10. Stress-strain graph as determined by simulation. (a) Overall shape of graph. (b) Close-up shape near zero TABLE II SPECIFICATIONS AND OF THE 2-DOF MANIPULATOR Specification Value Number of Joints n 3 Half of Contact angle α 0.579 rad Radius of Contact surface r 14.8 mm 29 mm Link Length l Pretension (N) 20.0, 33.1, 46.5, 59.9 N TABLE III STIFFNESS COMPARISON Tension (N) 20.0 33.1 Simulated Stiffness (N/mm) 0.161 0.266 Calculated Stiffness (N/mm) 0.162 0.268 46.5 0.374 0.376 59.9 0.481 0.484 From (25), the displacement of the tilt wires Δlt also can be expressed as follows: n Δφ ⎞ ⎛ Δlt ≡ Δltl = Δltr = 2r ∑ ⎜1 − cos( i ) ⎟ 2 ⎠ i =1 ⎝ 2 n ⎞ r n ⎛ ⎛ d ⎞ r ⎛ 1 2 ⎞ 2 ≅ 2r ∑ ⎜ Δφi ⎟ = ∑ ⎜ ⎜ ⎟ Δsi ⎟ = Sn d2 2 ⎜ ⎟ 8 4 h 4 nh ⎝ ⎠ ⎝ ⎠ i =1 i =1 ⎝ ⎠ (33) By using the virtual work concept, an energy conservation equation can be obtained as follows: By putting (32) and (33) into (34) and differentiating both sides of (33) by d , r cos α r . F = T Sn 2d + T S n 2d 2 4nh 4nh 2 (36) As a result, the stiffness K is obtained as F r(1 + cos α ) K = = Sn T d 2nh 2 (37) This verifies that the stiffness of the manipulator can be adjusted via the tension of the wires, and the relationship between the stiffness and the tension is approximately linear. This is an important advantage of the variable neutral-line design compared to other comparable manipulators. Note that increasing the number of joints reduces the manipulator stiffness because n is in the denominator of (37). However, if the maximum bending angle is considered, this leads to a different conclusion, which will be discussed in Subsection VII.B. Fig.10 illustrates the simulation results of the manipulator with the specification of Table II, where frictional effects are ignored. For the simulation, the multi-body dynamics simulation software MSC ADAMS 2012 was used. When the maximum lateral motion in Fig.10(a) is extremely high (more than 60mm in minimum tension), the overall graph does not follow a linear relationship because the manipulator behavior lies outside the valid range of the Taylor series approximations applied to (14), (15), (22) and (23). However, in a reasonably small region about zero displacement, it shows an approximately linear relationship.. Table III shows the simulated stiffness and calculated stiffness using (37). The error between them is negligible, which means that the stiffness calculation and approximation is valid. V. ACTUATION SYSTEM DESIGN Most current tendon-driven mechanisms employ pulley mechanisms or linear actuators, due to the symmetric property of the wire pair. Fig.11(a) shows a concept of an actuator design using a pulley mechanism. This simple approach cannot be easily applied to the variable neural-line manipulator because it has an asymmetric wire movement. If the pulley mechanism is used for the variable neutral-line manipulator, the pulley is pulled as it deflects, which means that the pivot of the pulley moves in a wide range, and the wire tension affects the torque of the actuator when it bends. Alternatively, two linear actuators can be used to actuate two wires individually, but these actuators must have a complex force control function for tension control. d ∫ Fdx = TΔl p + TΔlt 0 (34) 8 Δγ l and Δγ r Manipulator side Actuator side β ψ 2 − 2 γ r (ψ ) γ l (ψ ) Manipulator side Actuator side Rotational Actuator β β Pulley Rotational Actuator Pan shape Lever ra ψ Pretension (a) (b) Fig.11. Conceptual Design of Actuating Mechanisms (a) Conventional concept (b) Proposed concept Tilt motion Pan motion Manipulator side are β β ψ ⎞ ⎛ Δγ l (ψ ) = γ l (ψ ) − γ l (0) = −2ra ⎜ cos( ) − cos( − ) ⎟ 2 2 2 ⎠ (39) ⎝ β β ψ ⎞ ⎛ Δγ r (ψ ) = γ r (ψ ) − γ r (0) = −2ra ⎜ cos( ) − cos( + ) ⎟ 2 2 2 ⎠ ⎝ Similarity between (4) and (39) shows that the proposed actuation mechanism can compensate the asymmetric motion of wire pair. If we set the length of lever ra as nr and half of the pan shape angle β as 2α , the rotation of the lever and the bending angle of the manipulator has a direct relation ψ = θ / n . Thus, the rotational actuator can solely control the bending motion of the manipulator, and the pretension shown in Fig.11(b) can adjust the stiffness independently. This actuation mechanism is for a 1-DOF manipulator. For complete compensation of 2-DOF motion as (6), another mechanism is required. Fig.12 shows the actuation mechanism for a 2-DOF manipulator. The length of the brown colored wire changes as the lever rotates, as follows: Δν (ψ p ) = 2ra cos ψp 2 (40) Actuator side Similar to (39), it can compensate the last term of (6) if we set ra ψp ra and β as nr and 2α . Even though the proposed mechanism in Fig.12 can compensate for the coupling of the 2-DOF manipulator, it can be somewhat complicated to implement. In Subsection VII.C, simplification of the actuator will be discussed. ψt Pretension side A. Implementation Details Pretension for pan wires Pretension for tilt wires Fig.12. Conceptual Design of 2-DOF Manipulator Therefore we propose a new actuation mechanism that mechanically compensates for the asymmetric wire movement, and achieves a proportional relationship between actuator motion and manipulator motion. Fig.11(b) shows the basic concept of the proposed actuation mechanism for a 1-DOF manipulator. It is composed of a fan-shaped lever, and actuator wire pair connected at both ends of the lever. The length of the actuator wire pair γ l and γ r from Fig.11(b) as follows: π − β +ψ β ψ γ l (ψ ) = 2ra sin( ) = 2ra cos( − ) 2 2 2 π − β −ψ β ψ γ r (ψ ) = 2ra sin( ) = 2ra cos( + ) 2 2 2 where As illustrated in the conceptual designs in Fig.11(b) and Fig.12, the pivots of the actuation levers must be able to translate in order to deliver a pretension force to the wires through the lever mechanism. This moving pivot leads to a complicated implementation, because the gears and motors (with associated cabling) connected to the lever must all move along with the pivot motion. In order to simplify this, the wire path is redirected as shown in Fig.13(a). Instead of moving the pivot of the lever, an additional pulley with a slider at the center moves according to the motion of the pretension wire (black solid line). is obtained (38) ra , β and ψ denote the radius of the lever, half of the pan shape angle, and the amount of lever rotation, respectively. The displacements of the actuator wire pair 9 Fig.14. Detailed Design of 2-module 4-DOF Manipulator Fig.13. Detailed Design of a 2-DOF Manipulator Fig.13(b) and (c) show a front and exploded views of the detailed actuator mechanical design. It is designed to satisfy the performance specifications in Table II. Two identical mechanisms are mounted in order to actuate one 2-DOF manipulator. For actuation of the levers, two 8W BLDC motors with 53:1 gear heads were used. Between the levers and the gear heads, 8:1 gear pairs were placed. As the maximum continuous torque of the motor is 8 mNm and the efficiency of the gear head is 59%, the approximate continuous output torque of the lever is 2Nm. In order to control the wire tensions, 1.22mm pitch lead screws and springs were used. The tension can be changed from 8.8N to 40N by rotating the lead screws using another geared motor having the same specification. As can be seen in Fig.13(b), the wires connected to the lever are wound three times around pulleys to amplify the wire motion. In order to minimize friction, miniaturized bearings were used for the pulleys. The wires connected to the manipulator shown in Fig.13(d) are also wound three times to lessen the wire motion and amplify their tension. This amplification mechanism distributes the stress among multiple wires, hence, high tension for the manipulator can be achieved by using low payload, small wires. For implementation, Polymer wires (Dyneema®) of diameter 0.3mm were used. However, amplifying the tension by using multiple windings also increases friction, and causes error between the modeling and implemented system due to hysteresis in repeated motion. This will be examined in Section VI. Fig.14(a) illustrates the assembled structure of a 4-DOF variable neutral-line manipulator system. Two identical 2-DOF manipulators were stacked, and two identical actuation mechanisms were connected to them. In order to transfer wire motion through a flexible path, Teflon conduits were used. Fig.14(b) shows the assembled structure of the joint. In order to make the joint exhibit pure rolling, Teflon flexure rings of 0.5mm thickness were attached between the links, as shown in Figure 14(b). Most of large frames (made from ABS material) were fabricated mainly by using 3D fused deposition manufacturing (FDM). Small parts like pulleys and sliders were made from aluminum alloy (AL 6061T6). The diameter of the manipulator was chosen with a large inner channel to allow passage of multiple dexterous surgical instruments and an endoscope. Theoretically, based on the design of the device, there are no strict size limitations. We expect that 5mm and 3mm diameters are also feasible, which are standard sizes of conventional laparoscopic surgical instruments. However, we note that as the device size shrinks, the payload and the stiffness will decrease accordingly. 10 Considering practical implementation issues, small-sized manipulators pose greater fabrication difficulties, such as fabricating miniaturized flexures and attaching them to rolling links. We can greatly simplify the mechanism by removing the flexure and allowing the actuation wires to replace the function of the flexure, by guiding the rolling action between the link surfaces. However, the wires cannot completely prevent slip between the rolling surfaces, which could lead to inaccuracy in pose control. The manipulator was designed for multiple uses. Sterilization is an important issue for such a complicated mechanism. We are considering low-temperature liquid sterilization methods because the mechanism has heat-sensitive components, and thus steam sterilization is not adequate. For the manipulator shown in Fig.1(b), a cover sheath made from EPDM has been developed (not shown in the figure), which is a commonly used material for flexible endoscopes. In order to prevent the EPDM sheath being caught between the rolling surfaces and minimize friction between the sheath and manipulator, a mesh layer made by woven steel wires was placed between the sheath and the manipulator. However, the sheath acts to resistant bending motion and thus slightly increases hysteresis of the manipulator motion. VI. EXPERIMENTAL VALIDATION This section presents experimental results to verify the proposed manipulator models. The experiments were conducted using the same specifications as those in Table II. The stiffness measurement was done on one module by using a texture analyzer which can measure up to a 49N maximum force with 0.001N sensitivity. Fig.15 illustrates the stress-strain curves measured for four different wire tensions levels. Although the lateral motion is relatively small compared with the simulation in Fig.10, the curves are nonlinear and exhibit hysteresis behavior. The hysteresis is caused by changes in the wire tension according to the direction of frictional forces acting on the wires. When the manipulator is driven by a external force, friction aids the wire tension, and thus the manipulator exhibits higher stiffness. When the manipulator is driving itself, on the other hand, friction reduces the wire tension, and thus the manipulator exhibits lower stiffness. Sources of friction in the manipulator include a (relatively small) contribution from the bearings that acompany every pulley in the actuation mechanism. Moreover, the multiple windings of the wires in the manipulator not only amplify the wire tension, but also amplify the friction. Therefore, using single wire for the manipulator as shown in Fig.6(a), instead of multiple windings, can reduce the hysteresis. However, in that scenario, thicker wires and conduits should be used to a maintain high payload. Applying Teflon coating or inserting Teflon tubes throughout the wire paths in the link holes of the manipulator could also reduce the friction and the resultant hysteresis. The stiffness change according to the tension variation is approximately linear as shown in Fig.16 and Table IV. The simulated stiffness-tension curve is linear, and crosses the zero point because it has no friction and follows (37). In contrast, the experimental curve has a nonzero y-intercept of 0.088N/mm. It means that the additional force caused by friction aids the wire tension. Fig.17 shows several snapshots of motion of a 4-DOF variable neutral-line manipulator system prototype. As the maximum bending angle of one module is more than 45deg, the manipulator can be bent 90deg as shown in Fig.17(a),(b) and (c). Under no external force, the motion is not affected by the stiffness changes, and the motion with low stiffness is approximately the same as the motion with high stiffness. ) (N 6 e c r o F5 ) (N 1.8 e c r o 1.5 F y = 0.5292x + 0.2276 y = 0.4372x + 0.1915 4 1 y = 0.3339x + 0.0453 3 y = 0.2419x + 0.0839 2 Tension 20N Tension 33.1N Tension 46.5N Tension 59.9N 1 5 10 (a) 15 0.5 0 20 Displacement (mm) 0 0.5 1 1.5 (b) 2 2.5 3 Displacement (mm) Fig.15. Stress-strain graph by experiments (a) Overall shape of graph (b) Closed-up shape near zero ) m 0.6 m / 0.5 N ( s s e 0.4 n ff it S 0.3 0.2 Experiments Simulations 0.1 0 0 5 10 15 20 Tension (N) Fig.16. Relationship between wire tension and manipulator stiffness TABLE IV STIFFNESS BY EXPERIMENTS Tension (N) 20.0 33.1 Stiffness (N/mm) 0.242 0.334 46.5 0.437 59.9 0.529 11 w (43) = r sin α = ri sin α i , 2 where ri and α i are design parameters of an ni -joint manipulator having the same maximum bending angle and link width. The stiffness of the (a) (b) ni -joint manipulator is represented using (42) and (43) as ri (1 + cosα i ) r sin α (1 + cos( nα / ni )) (44) T = Si T 2 2ni h 2h 2 ni sin( nα / ni ) If we consider a manipulator with a large number of joints K n i = Si (c) (d) (e) (f) r sin α . (45) T nh 2α For example, the stiffness of the manipulator with an infinite number of joints is 0.445N/mm when the tension is 59.9N. This value is not severely small compared to the stiffness of the manipulator with three joints, which is 0.484N/mm. It means that increasing joint number does not significantly affect the stiffness performance, and we can select the proper number of joints depending on specific task requirements. K ∞ = lim K ni = S∞ ni →∞ Fig.17 2-DOF Manipulator Prototype Performing Controlled Motions VII. DISCUSSION So far, the mechanics of the variable neutral-line manipulator and the actuation mechanism have been investigated and verified. In this Section, the effect of joint number and design variations are discussed. A. Maximum Bending Angle As mentioned in Section VI, the maximum bending angle of one module is approximately 45 deg. This can be predicted by considering the tension balance. Let us consider the extreme bending pose of pan motion like Fig.6(b). In this extreme case, the left pan wire (blue line) has tension T and the right pan wire (purple line) has zero tension, because the sum of the tilt wires have tension T and this balances with the left pan wire. Therefore, the joint will be settled at the middle of the left pan wire and tilt wire at the center, which means that the maximum bending angle is half of α . Thus the maximum bending angle of the module is θ max = nα . 2 (41) C. Simplification of Actuation Mechanism In Section V, an actuation mechanism that completely compensates for the coupling of the 2-DOF manipulator was proposed. In order to simplify the actuation mechanism, two 1-DOF actuation mechanisms shown in Fig.11(b) can be used for a 2-DOF manipulator if we can eliminate the coupling mechanically. Fig.18 introduces a linkage design to diminish or eliminate the coupling effect. If we enlarge the space for passage of the center wire, elongation of the center wire path is diminished or completely eliminated. Fig.18(b) and (c) shows the linkage with space to the center of the rolling space, where the length of the wire path in the space is maintained to while the original link has additional length of as shown in Fig.18(a). However, due to the removal of Δ lt shown in (33), the stiffness decreases as follows: F r cos α (46) K = = Sn T d 2nh 2 For practical use, this modification will be an efficient tradeoff between simplicity and performance. The theoretical maximum bending angle of the implemented manipulator is 49.8deg, which agrees reasonably with the measured value. B. Stiffness Change with Joint Number under Fixed Maximum Bending Angle and Link Width Assuming that the maximum bending angle θ max and the width of the link w in Fig.4(a) are fixed, we can see that the stiffness changes as the number of links increases using (37) and (41). These assumptions can be represented as θ max = nα niα i , = 2 2 (42) 12 Center of the rolling surface Enlarged space for center wire d pr 2r 2r (a) (b) (c) Fig.18.(a) Original Link design, (b) and (c) modified link design to diminish the coupling between pan and tilt motion between the wire tension and stiffness of the manipulator, and its demonstrated stiffness controlling capability without losing motion control performance. The thin tubular structure of the manipulator and the ability to control stiffness by only using position-controlled actuators could make the manipulator well suited for MIS applications. For instance, the manipulator can be used as a flexible guide tube of a single port surgical device. In this application, the stiffness changing capability can be a great advantage, because compliance is important for safely moving the guide tube in the abdominal cavity. On the other hand, high stiffness is crucial for payload motion or precise operation. Current work is focusing on integrating all of these efforts to develop an innovative surgical robotic system, and evaluating its performance and effectiveness. For future research, stiffness analysis under arbitrary bending angles will be investigated. For more precise position control, friction modeling and analysis deserve study. REFERENCES Fig.19. (a) Pre-curved design (b) Rigid-joint like design D. Design Variation As mentioned in Section II, the joint shape does not need to be a cylindrical-shape rolling mechanism. For instance, if the sum of wire movement has a negative value, we can also control the stiffness by using pushing shafts instead of using pulling wire tension. However, in this case the actuation mechanism should be redesigned to compensate for asymmetric wire motion. Fig.19 presents two design variations of the proposed manipulator. In most cases of snake-like manipulators, the initial pose is straight shape, which represents a singular point. As shown in Fig.17(a), the initial pose can be changed to a C-shape or S-shape by simply changing the individual link shape. Also, by using different surface angles as Fig.17(b), a near-rigid joint design is feasible. This manipulator can be inserted through a curved path by loosening the wire tension, and can be used like a rigid joint by applying wire tension. VIII. CONCLUSION This paper introduced a unique variable neutral-line manipulator and actuation mechanism to achieve a controllable stiffness capability. Design, modeling, analysis and experimental results of the variable neutral-line manipulator were presented. Detailed analysis of its stiffness properties and verification of its performance based on simulations and experiments proved the direct relationship [1] J. Ding, K. Xu, R. Goldman, P. Allen, D. Fowler, and N. Simaan, "Design, simulation and evaluation of kinematic alternatives for Insertable Robotic Effectors Platforms in Single Port Access Surgery," IEEE Int. Conf. on Robotics and Automation, pp.1053-1058, 2010 [2] I. Gravagne and I. Walker, " Manipulability, Force, and Compliance Analysis for Planar Continuum Manipulators," IEEE Trans. on Robotics and Automation, Vol. 18, N0. 3, June, 2002. [3] Robert J. Webster, "Mechanics of Precurved-Tube Continuum Robots," IEEE Trans. on Robotics, Vol.25, No.1 Feb., 2009. [4] Grissom M., Chitrakaran V., Dienno D., Csencsits M., Pritts M., Jones B., McMahan W., Dawson D.M., Rahn C. and Walker I.D., “Design and experimental testing of the OctArm soft robot manipulator,” SPIE, Orlando, FL, 2006. [5] A. Degani, H. Choset, B. Zubiate, T. Ota, and M. Zenati, "Highly Articulated Robotic Probe for Minimally Invasive Surgery," International IEEE EMBS Conference, pp.3273-3276, Vancouver, Canada, 2008. [6] Hannan, M. W. and I. D. Walker, “A Novel ‘Elephant’s Trunk’ Robot,”2000 IEEE/RSF International Conference on Intelligent Robots and Systems, Takamatsu, Japan, 2000. [7] Brown, H. B., M. Schwerin, E. Shammas, H. Choset, “Design and Control of a Second-Generation Hyper-Redundant Mechanism,” 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diege, CA, 2007. [8] Gravagne, I.A., Rahn, C.D., Walker I.D., "Large Deflection Dynamics and Control for Planar Continuum Robot," IEEE/ASME Trans. on Mechatronics, Vol.8, No.2, June 2003. [9] C. Thompson, M. Ryou, N. Soper, E. Hungess, R. Rothstein, and L. Swanstrom, "Evaluation of a manually driven, multitasking platform for complex endoluminal and natural orifice transluminal endoscopic surgery applications," Gastrointestinal Endoscopy, Vol. 70, Issue 1, pp. 121–125, July, 2009. [10] G. Dogangil, B.L. Davies and F.R. Baena, “ A Review of Medical Robotics for Minimally Invasive Soft Tissue Surgery”, Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, 2010 224: 653, pp.653-679. [11] B.W. Miedema, J.A. Astudillo, E. Sporn, K. Thaler, “NOTES Techniques: present and future,” Eur Surg (2008) 40/3: 103-110. [12] S. Shaikh and C. Thompson, "Natural orifice translumenal surgery: Flexible platform review," World Journal of Gastrointestinal Surgery, Vol. 2, Issue 6, pp. 210-216, June, 2010. [13] A. Loeve, P. Breedveld and J. Dankelman, "Scopes Too Flexible ... and Too Stiff," IEEE PULSE, pp26-41, Nov./Dec., 2010. [14] Chen, Y., Chang, J.H., Greenlee, A.S., Cheung, K.C., Slocum, A.H., Gupta, R., “Multi-turn, Tension-stiffening Catheter Navigation System,” 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, 2010. 13 [15] A. Petterssona, S. Davisb, J.O. Grayb, T. Doddc, and T. Ohlsson, “Design of a magnetorheological robot gripper for handling of delicate food products with varying shapes,” Journal of Food Engineering, vol. 98, issue 3, June, 2010. [16] J. Chen and W. Liao, “Design and Control of a Magnetorheological Actuator for Leg Exoskeleton,” 2007 IEEE International. Conf. on Robotics and Biomimetics, pp. 1388 - 1393, Sanya, China, 2007. [17] N. Cheng, G. Ishigami, S. Hawthorne, C. Hao, M. Hansen, M. Telleria, R. Playter, and K. Iagnemma, “Design and Analysis of a Soft Mobile Robot Composed of Multiple Thermally Activated Joints Driven by a Single Actuator,” IEEE Int. Conf. on Robotics and Automation, pp. 5207-5212, Anchorage, USA, 2010. [18] M. Telleria, M. Hansen, D. Campbell, A. Servi, and M.. Culpepper, "Modeling and Implementation of Solder-activated Joints for Single-Actuator, Centimeter-scale Robotic Mechanisms," IEEE Int. Conf. on Robotics and Automation, pp.1681-1686, Anchorage, USA, 2010. [19] E. Brown, N. Rodenberg, J Amend, A. Mozeika, E. Steltz, M. Zakin, H. Lipson, and H. Jaeger, “Universal robotic gripper based on the jamming of granular material,” Proc. of the National Academy of Sciences of the United States of America, vol. 107, 2010. [20] N. Cheng, M. Lobovsky, S. Keating, A. Setapen, K. Gero, A. Hosoi, and K. Iagnemma, "Design and Analysis of a Robust, Low-cost, Highly Articulated Manipulator Enabled by Jamming of Granular Media," IEEE/RSJ Int. Conf. on Intelligent Robotics and Systems, Portugal, 2012. [21] Y.J. Kim, S. Cheng, S. Kim, and K. Iagnemma, "Design of a Tubular Snake-like Manipulator with Stiffening Capability by Layer Jamming" IEEE/RSJ Int. Conf. on Intelligent Robotics and Systems, Portugal, 2012. [22] Y.J. Kim, S. Cheng, S. Kim, and K. Iagnemma, "A Novel Layer Jamming Mechanism with Tunable Stiffness Capability for Minimally Invasive Surgery" IEEE Trans. on Robotics and Automation, to be published. 14