The Pentagram Map is Recurrent Richard Evan Schwartz
advertisement

The Pentagram Map is Recurrent
Richard Evan Schwartz
CONTENTS
1. Introduction
2. Projective Geometry
3. The Invariant Function
4. The Volume Form
References
The pentagram map is defined on the space of convex n-gons
(considered up to projective equivalence) by drawing the diagonals that join second-nearest-neighbors in an n-gon and taking
the new n-gon formed by the intersections. We prove that this
ma
P ' s recurrent; thus, for almost any starting polygon, repeated
application of the pentagram map will show a near copy of the
starting polygon appear infinitely often under various perspectives.
1. INTRODUCTION
S\"Z^HV
yy ^^><^^
\\
J^J^^
^^s.
1\P
/V
P' ^ v l \
/ / \
1\\
1/
\
I//
S^^^
\
y I
>T^^\^^
/ \ I
N.
x^^^^y^
1/
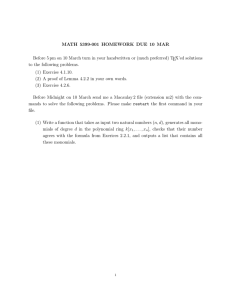
Given a convex n-gon, P , one can connect every
other vertex with a line segment, creating a star-like
figure called the pentagram. Part of the pentagram
defines a new convex n-gon, P', as shown (for n =
7) on the left. Iterating, one defines P", P'", etc.
As suggested by Figure 1 below, the map P —> P"
defines a map between labelled n-gons. We call the
map P —> P" the pentagram map. We studied the
pentagram map in [Schwartz 1992].
The natural setting for the pentagram map is the
projective plane, RP 2 . (See Section 2 for background information on the projective plane.) Say
that two labelled strictly convex n-gons are equivalent if there is a projective transformation of MP2
which takes one to the other. Let E n denote the
2
FIGURE 1. Definition of the pentagram map.
© A K Peters, Ltd.
1058-6458/2001 $0.50 per page
Experimental Mathematics 10:4, page 519
520
Experimental Mathematics, Vol. 10 (2001), No. 4
space of equivalence classes of strictly convex ngons. As we saw in [Schwartz 1992], the space S n is
diffeomorphic to R 2n ~ 8 .
The pentagram map commutes with real projective transformations, and so induces a mapping Tn :
S n -> E n , for all n > 5. We saw in [Schwartz 1992]
that the maps T5 and Tl act trivially on E 5 and E 6
respectively. For n > 7, the map Tn does not have
finite order. In this paper we verify Conjecture 4.1
of our earlier paper:
Theorem 1.1. Tn is recurrent on E n , /or a// n > 5.
By recurrent, we mean that almost every point is an
accumulation point of its own forward orbit. Our resuit has the following geometric interpretation. Begin with a random choice of convex polygon P , and
look at the sequence P, T n (P), T n 2 (P),.... A near
copy of P appear infinitely often, from varying perspectives.
Here is an outline of our proof of Theorem 1.1. In
_
. _
our earlier paper we constructed a smooth function
„ _^
^
.
.
.
_
_
.
/ : S n -> r|l,oo)N with the pfollowing properties:
L» y
&r
1. / ~ 1 [ 1 , r] is compact for any real number r > 1.
2. / o Tn = / .
fin.
,_ . . .
..
, . ,
, ,
ir
To help keep this paper self-contained, and also to
.
, ,
1
-n
set up some notation needed rfor later steps, we will
.
.
.
.
'
.
construct fp in a new way and sketch proofs ofc the
_, . . .
. z,
two properties above. This is done in Section 3.
_.
.
.
i
/._i r-i i .
Ihe two properties above show that f l , r is
Z, .
.
m
. ,
a compact T n -mvanant set. The mam step m the
proof of Theorem 1.1 is:
every point x G X is an accumulation point of the
sequence {Tk(x) \ k G N}.
Proof
? , B ^ Set °f p o i n t s
N
l
i (x)\k^
> avoids
the
^-neighborhood of x. If Ne has positive measure,
w e c a n find a
*" ba11 B C X s u c h t h a t ^ = 5 n N*
has
ositive measure
S
P
' Here we ^
< e' S i n c e
X h a s finite v o l u m e t h e s e t s i n
'
< T , (f )> a r e n o t a11
pairwise disjoint. Hence, T(/?) n T ' (/?) for some pair
ij EN. Setting ifc = j - i, we have T*(/?) H /? 7^ 0 .
This contradiction shows that N£ has measure zero.
S i n c e £ is
^ ^ a r y , we are done.
•
Applying the Poincare Recurrence Lemma, we see
for almost every
t h a t Tn i s reC urrent on f'^l.r]
c h o i c e o f r e a l r > 1. We choose a sequence ru r 2 , . . .
w h i c h i n c r e ases unboundedly, such that Tn is recurr e n t o n f-i^
rfc] for a l l fc> S i n c e t h e s e s e t s exhaust
5]^ w e s e e ^ ^ jpn [s recurrent on S n .
'
x e X
For an
^
e
> °'
let N
< be
such that the se( uence
t h
r
T
^
, xl
A .
The recurrence property is more general than our
^
^
, ^
,
.^.
T , ^
result suggests. Let
\l be the set or£ proiective
• 1
1
r n
r^i
i
equivalence classes of n-gons. These n-gons need
not be convex. Tn is defined on a full measure set of
As we conjectured in [Schwartz 1992], it seems
that Tn : fin —>• fin is also recurrent. Our proof here
,
,, .
, ,, .
u
has nothing to say about
this,
^ .
,.
,
. L.
This paper relies on some basic projective
geome~ t.
.
, ,
,. r
try. TIn Section
2 we give some background mtorma,.
,, .
,. , ,,
. £
..
. ,.
^ l o n o n ^ 1 S subject. More information
on proiective
,
, . r,.,.,, ,
1^.1 ^r
A
geometry
can be rfound in Hubert and Cohn-vossen
1Orni f
lyoul, tor instance,
.,
A11 ,,
£
All
the ideas ctor our proof,
save one, came £ from
Lemma 1.2 (Volume Lemma). There exists a smooth
computer experimentation. In particular, we discovvolume form \xn on S n which is preserved by Tn.
ered all the computations in the paper numerically.
...
. . . _,
On the negative side, some of our computations are
TT_
We will prove this in Section 4.
, w
, ,.
„
,
, , .,
n r, 15 ^
i
j_
! .
•
ii
unmotivated.
We don t really understand why they
By bard s theorem, almost every choice ofr r yields
,
.,.
.,
,
, J
A
n
r
.
.r , , . , ,
.
,_
,
are true. On the positive side, we know tor sure J that
T_
a smooth manifold-with-boundary
A
= f 1 r il , r .
,
,
.
.
,
.
,
,.
n
j
# j l
r^.
_
_
.
.
they are true, xi^or
instance,
the mam
thrust in this
Ihe map 1 = ln acts as a volume preserving map
, ,
, .
„
, .
,
,^ ri , , . , , . .
.
.
,
paper is that a certain collection ofr matrices always
on A. To deal with this situation we invoke a spef Jx
.
^ w
XJ^U-J^
• .
..
p T -n .
^T,
T
nhas determinant 1. We computed this determinant
cial case ot the romcare Recurrence Lemma, bmce
.,,.
,
,
.
,
M
on
r• 1
• 1 T • 1
O T A i? i
millions ofr random samples rfrom 2lthis r family
and
xl
the proof is short, we include it here, bee LArnold
. ,, ,
,
.
,,
i
. _^OT .
. ' ..
numerically itA was as close to
1 as one could expect
1978 for more details.
.*
.
.
.
,
.
r
x
from a nfinite precision calculation.
Lemma 1.3 (Poincare Recurrence). Suppose that X C
A key idea in this paper, which did not come from
E m is a smooth compact manifold-with-boundary.
computer experimentation, is the notion of the corSuppose T : X —> X preserves a smooth volume
ner invariant / p , recalled here in Section 3A. We
form, defined in a neighborhood of X. Then almost
originally learned about fp from John Conway.
Schwartz: The Pentagram Map isRecurrent 521
2. PROJECTIVE GEOMETRY
x-axis in R 2 . Let Xj be the image of Pj under this
„ . A. nl
identification. Then define
TI
The Projective Plane
The real projective plane, R P 2 , is the space of one,
x _ (fli - x3)(x2 — x±)
dimensional subspaces of R 3 . The ordinary plane,
(xi — x2)(x3 — x±)
R 2 , can be considered as a subset of R P 2 in the folThis
lowing way: The linear subspace spanned by the vecdefinition is independent of any choices used
tor (x,y, 1) is identified with the point (x,y) G R 2 . i n identifying L with the z-axis. x(pi,p 2 ,p 3 ,P4) is
Under this embedding, R P 2 is a compactification of invariant under projective transformations. That is,
R 2 . It is not hard to see that R P 2 naturally has the
structure of a smooth manifold.
X(nPl),T(p2),T(p3),T(p4))
A line in R P 2 is the union of all 1-dimensional
„ _,
i
*
J. •
i
•
•
o
v
•
i
_
i
subspaces contained m a given 2-dimensional subspace. Lines in RP 2 are actually topologically equivalent to circles. The set R P 2 - R 2 is exactly a line in
RP 2 , known as the line at infinity. Every ordinary
line in R 2 extends to a line in R P 2 by adding in the
point where it intersects the line at infinity.
The lines and points in R P 2 are intimately related. Given any two distinct points in R P 2 there
is a unique line which contains both of them. Likewise, given any two distinct lines in R P 2 there is
unique point contained on both.
O r
1 ^
or^T
=
xiPuP^Ps^)
/TnA
rVjr-L3(K).
T h eH i l b e r t M e t r i c
We say that a set X C R P 2 is convex if there is
a projective transformation T such that T(X) is a
closed compact convex subset of R 2 .
If X C R P 2 is a convex set, we can define a canonical metric dx on its interior X°. Given unequal
points p2,p3 G X°, let L be the line containing p2
and p 3 . Let px and p4 be the two points where L
intersects the boundary dX. We order these points
so that P I , P 2 ? P 3 J P 4 come in order on L. We define
Projective Transformations
dx 2
Any invertible linear transformation of R 3 maps one^ ' # 0 = log x O i , V2, Ps, PA)dimensional subspaces to one-dimensional subspaces,
7/
x
,
. ,
,.~
,.
r ^70)2 r^i- j . p Note that d(p ,p ) approaches 0 as p2 approaches p3
and so induces a diffeomorphism of R P 2 . This dif- a n . _ u 2 3 \
u
\ mi • 1 •
1
,.
.
„ ,
- .- .
£
±d that d(p2,p3) — d(p3,p2). The triangle mequalr
feomorphism is called a projective transformation.
. . _ \*-z->£-*> ^*^y
, . i
,
-n - .- .
r
x.•
1.
,
lty is also not hard to verify. dx is known as the
Pro ective transtormations act m sucn a way as to T^.77
r
• iD)Tn)2 2. T
• Tn)Tro2
Hubert metric.
map lines in R P 2 to lines in R P 2 .
^ n , .,. . x
,.
.ni_ A
r
. x. ^ r
Denned
as it is, in terms or
cross ratios,Ll
theTTHubert
mi
r
I n e group 01
projective
transformations is usu. .
_ ..
_^. x ' x Tr __ .
n T ^ i i r . n r /irnx T^ •
oT
- i
metric is natural with respect to rGL 3 (]Ji). It A and
ally denoted by PGL 3 (R). It is an 8-dimensional
^r
_ J; __ T^ : vJ
, 1 , 1 1 , .
r • , . TnMn.9
^ are convex sets and 1 : A -> Y is a proiective
T.
TTT
Lie group. We say that a collection of points in R P
.
__ . _ .
.
r
,
•.•-£,<*
, . , . .1
transformation mapping X to Y then T is an lsomeIS in general position 11 no three are contained in the
. , .
,
TTM1
o ^i ^
T - 7 ^ 7 n ,.r try as measured relative to the two Hubert metrics,
v
same line,
bay that a quadrilateral is a collection 01
4 general position points in R P 2 . Each element of
PGL 3 (R) is determined by its action on a quadrilat3. THE INVARIANT FUNCTION
eral. Indeed, given two quadrilaterals, with points
.
,. . .
1 u 11 A 4.-U
-
i
4. r D r « T
na>\ ^u 4.
labelled, there is a unique element 01 PGL3(JR) that
maps one quadrilateral to the other in a label preserving way.
The Cross Ratio
Suppose that Pi,P2?P3)P4 a r e 4 points on a line L c
RP 2 . One defines the cross ratio x(PiiPiiPziPi) i n
the following way. First, use an element of PGL 3 (R)
to identify L with (the one point extension of) the
3A. Basic Definition
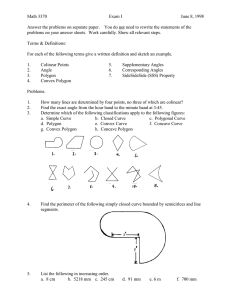
L e t P b ea n n
- g ° n ' a n d S i v e 'lt a n orientation. Let
p be a vertex of P and let a, 6 , . . . , h, i be the points
shown in Figure 2; note that a and b precede p under
ttie
S i v e n orientation. Set
O (P\ — ( h d\
P
E
P(P) = x{d, e, / , 3),
fp(P) — x(b,h,i,f).
522
Experimental Mathematics, Vol. 10 (2001), No. 4
O
9
FIGURE 2. Points in the definition of the corner invariant fp(P) = x(6, ^» h / ) and related quantities.
3B. Compactness Proof
In this section we prove that the level sets /
^
T T
J\P) — liJp{P)i
£(^) = n ^ ( P ) '
where the product is taken over all vertices of P .
A short calculation shows that
fp(P) = OP(P)EP(P).
To simplify the calculation, one can use the projec. . .
.
,
,.
,, , ,, .
tive in variance to normalize so that the 4 vertices
a, 6, / , # form a unit square. We omit the details.
,,
, , r ,, . . , ...
T 1 .
n
Taking the product of this identity over all ver,.
,, ,
tices, we see that
/('p') _ O(P)E(P)
Remark. Here is a geometric interpretation of / ( P ) .
Let P' be t h e pentagram of P . Let X be t h e convex
subset of MP 2 whose boundary is P . Let dx be t h e
Hilbert metric on X. Let p i , . . . ,p'n b e t h e vertices
of Pf listed in order. By simply using t h e definition
of t h e Hilbert metric, we have
-IL^
*°S/(/ ) — ^^^x(PijPi+iJ?
i=1
where indices are taken modulo n. In other words,
l o g / ( P ) is t h e perimeter of P' as measured in t h e
Hilbert metric on t h e convex set bounded by P .
This interpretation shows t h a t / ( P ) > 1.
[1, r] C
S n are compact. Our argument here is pretty much
a repeat of what we said in [Schwartz 1992]. Given
an n-gon P , the corner invariants fp(P) all lie in
[l,oo). Thus, if f(P) G [l,r] then fp(P) G [l,r] for
every vertex p of P.
Let PI,P2JP3JP4>P5 be 5 consecutive vertices of P :
^^^^><^^P^I
p^^^C ^ " ^ Ps/A
The quantity / P ( P ) is what we called the corner
invariant of P at p in [Schwartz 1992]. Moreover,
se
- 1
^\j
^
The point p 3 is confined to the shaded open triangle
A whose vertices are p2,P4 and q3. Here
We set fj = fPj(P).
held
p
)
fixed
a r e
a n dt h a t
Suppose that pi,p 2 ,p 4 ,P5 are
Pa (and possibly other points of
moved around. One observes three things:
1. If x G dA is not on the segment p^pl then / 3 ->
.'
.
rr
2. It x G pop* is not equal to p2 then r2 —>• 00 as
J
IT
"
.
1
1
1
.
3. It x G P2P4 is not equal to p 4 then r4 —> 00 as
y y
H
</4
^4
p 3 -> x.
^
These observations establish t h e following claim: If
/ ( P ) G [ l , r ] , a n d Pi,P2,V^Pb are held fixed, then
there is a compact set of positions, in t h e open triangle A where p3 could be.
gives a m a p from
T h e m a p P ^ {pup2,p3,p4,p5}
s n -> S 5 . There are n of these maps, depending on
t h e choice of vertex p i . From what we have just seen,
t h e image of / ^ [ l , r ] , under each of these maps, is
compact.
Suppose now t h a t {P^} is a sequence of convex
n-gons in R P 2 such t h a t f(Pk) G [ l , r ] . Suppose, by
induction, t h a t we can find a sequence of projective
transformations {Tk} such that, on a subsequence,
converge. Then,
t h e first m > 5 points of Tk(Pk)
u s i n g t h e appropriate m a p into S 5 we see that, on a
Schwartz: The Pentagram Map is Recurrent 523
thinner subsequence, the (m + l)st points also converge. Hence, the polygons Tk(Pk) converge, on a
subsequence, to a fixed polygon. This proves that
/ " H l , ^ is compact.
J
L
'
J
Let P G S n (l)- The vertices of P are labelled by
integers congruent to 1 mod 4. We coordinatize P
by the variables (xi,y2, • • • •>%2n-i,y2n)i where
n (p\ **
— T? CP\
^
£(i+l)/2 = Vi\r),
3C. Invariance Proof
V(i-l)/2 — &i\")-
Here, for instance, O1(P) is the quantity, computed
i nt h e r e v i o u s secti
Here we sketch the proof that foTn = f. This proof
P
™> f o rt h ev e r t e x i I n t h e s e
is different from what appears in [Schwartz 1992].
coordinates, O(P) = \[Xi and E(P) = UViW e
Let S n (j) be the set projective classes of convex
™ordinatize P = An(P) by the variables
x
n-gons labelled by consecutive integers congruent
[i-i)/2 — Oi(P'), y[i+i)/2 = Ei(P').
to j mod 4. There is a canonical map from S n W ec o o r d i n a t i z e p«= Bn{F) e x a c t l y a sw e c o o r d i .
into S n (l). A polygon whose points are labelled
n a t i z e d p u g i n g v a r i a b l e s j , a n d yn
by integers 1,2,3... is mapped to geometrically the
Acalculation shows that
same polygon whose points are labelled by integers
•. _
x
•.. _
\
x y 2
1,5,9,.... We denote this map by E n = * E n (l).
x'd= (.l~X^y^ \y.+u y> = I1
^ ^ \x.,1?
V
V
We denote the inverse map by S n (l) = » E n .
^"2^-1 /
^i+1%+2/
The map P -> P ' , formerly defined as a map on „//_ f^^j-^Vj-s\
,
,,_
f^-xfH3y'j+2\f
1 x
1
unlabelled n-gons, can naturally be interpreted ei\ ~ i+22/i+i/
\ "~ x i-i2/j-2/
ther as a map An : S n (l) -+ S n (3) or as a map B n : The identities in Equation (*) follow immediately
En(3) -» E n (l). The two interpretations are shown,
from these equations,
for n = 7, in Figure 3. The map Tn : S n ->> S n
factors in the following way:
4>T H E V O L U M E F O R M
E n = ^ S n (l) —^ S n (3) - A S n (l) =^> S n .
5
/yY^^i
/ / ^ ^ ^ K
/\^f^^
>v/ \
2 7
§\^^ /
/\\
\
/
I J ^ 25
Vy 11
3^/ /
13
\^^i9^^
/
\\ J ^ ^ - ^ ^ ^ / /
17
21
11
Framings and Volume Forms
Suppose that X is a smooth manifold. A framing
of X is a smoothly varying choice of basis for the
tangent spaces of X. That is, for each x G X we
have a basis i^ for the tangent space T^X. If F
^sa framing o n X, then F canonically determines
a volume form /^i?. Namely, //^ is the volume form
which assigns the value 1, at each point, to the basis
J^-^
yw^^^^l
/ / ^ ^ * \ l\
/^^/v
\ /\
1
\ ^ /
/\\
\\ /
/ / J 27
\Yi3
/l
/
15
4A>
given b y F
'
Suppose that X± and X2 are two smooth manifolds, equipped with framings Fx and F2 respectively. If a : X1 —> X2 is a diffeomorphism, and
Xi G Xi is a point, we define the matrix Ma.^ as
follows: We have the differential map
\ h > ^ \/ /
19
23
FIGURE 3. Vertex labeling for A n (upper left) and
Bn (lower
right).
Let E a n d O b e t h e invariants defined in t h e previous section. To show t h a t / o Tn = f we will show
that
£/ o An — U, U o An = h,
E o Bn = O, O o Bn = E.
da:TXxXx^Tx,X2.
Here x2 = a(xi).
s
W e write o u t this m a p with re-
§ i v e n b ^ F^a n dF^ T h i s i s
matrix. W e say t h a t a is adapted to (F l 5 jF 2 ) if
det(Ma.) = 1 for all x G X1. Note t h a t a is adapted
t o (FUF2) if a n d only if t h e differential da m a p s fjbFl
t o /jJp2.
Suppose now that G : X -> X is a smooth, free,
proper group action. [Free means that every element of G acts with no fixed points, and proper
P
e c t t ot h eb a s e s
our
524
Experimental Mathematics, Vol. 10 (2001), No. 4
means that {g G G \ g{K) D K ^ 0 } is compact whenever K is compact.) Then the quotient
X = X/G is a smooth manifold, and any smooth
map T : X -^ X that commutes with G induces a
map T : X -> X. Here is our main technical result.
.
AH c
n <y v J.U £
Lemma 4.1. suppose G : X —> X is a smooth, free,
,.
o
rf,
^
v .
proper group action, suppose 1 : X -^ X is a
,i irr
T• 7
i
.,, ,,
L•
smooth aiffeomorphism which commutes with the action ofG. Suppose there exists a smoothG-invariant
framing F on X such that T is adapted to (F,F).
Then there is a volume form /i on X = X/G which
is preserved by the induced map T : X -+X.
Proof. We begin with a fact from linear algebra. Suppose V is an n-dimensional vector space, equipped
with a volume form v. Suppose ^ c V i s a f c dimensional subspace, equipped with a volume form
w. We shall denote the quotient map V -+ V/W by
x -> x. It is an elementary fact that there is a
unique volume form q on V/W such that
(x A'-Ax
) = v(x^A'"Ax^-kAyiA'"Ayk)
w(yiA- • -Aj/fe)
Here x l 5 . . . , xn_fc G F are vectors such that x x , . . . ,
xn_fc is a basis for F / W , and yu ..., yk is any basis
for W.
Let x £ X be a point. Let i G X be a point which
is mapped to X under the quotient map X -> X.
Let V = T 5 X be the tangent space. Let LG be
the Lie algebra of left invariant vector fields on G.
We fix a left invariant volume form on LG. Each
element of LG defines a G-invariant vector field on
X. In this way, there is a canonical embedding of
LG into V. Let W be the image of LG under this
to
. . _.
__
__
.
embedding,6 at x. The tangent space to X at x is
. 11 '.
,
f
^.
Tr/TTr
canomcally isomorphic to the quotient V/W.
i
xr 1
,
n
r
A1
Note that V has the volume form v = aF. Also,
,
_
.
, . .,
.n •
.i
TTr,
W has a volume form given by its identification with
0
/
LG. We use the linear algebra tact above to get a
.
__ T r / T
volume form ax on T^A = V/W. This construction
,
,
,
r- i
of ax does not depend on the choice of x, because
^ .. . . . . ^ .
.
_
.'
.
everything in sight is G-mvanant. Let fi be the volJ
to
^to , ,
.
!
r.
ume form on X which restricts to ax at each point
^r __
.
.
. ,.
1
x e X. The naturahty of our construction implies
_
that T preserves a.
D
^
^
2 VolTo
prove
Theorem
1.1
itconvex
remains
ume
be the
Lemma.
space
of
Here
strictly
is
an
outline
n-gons
ofto
its prove
proof.
in Rthe
PLet
. Let
S
G = PGL 3 (R). Note that G acts freely, properly
and smoothly on S n , and that £ n / G = S n . Let
fn : E n -> S n be the pentagram map, as it acts on
S n . (T n induces the map T n : S n —>> E n .)
We define S n ( j ) as the space of strictly convex
n-gons in R P 2 , whose points are labelled by con°
•>
r
J
secutive integers congruent to j mod 4. Just as we
°
°
^
r
factored the m a p T n in Section 3C, we factor Tn as:
^
'
^
. ^ / ] \ ^ ^ /g\ g ^ ^ / ^
^^
T h e double arrows
indicate maps which just change
* T h e factorization here forms an obvious commuting diagram with the one given at the
beginning of Section 3C
B e l o w w ew i n c o n s t r u c t G -invariant framings F(l)
^ reS p e ctively. Then
a n dF ( 3 ) o n £ n ( 1 ) a n d ^
w e w i ng h o w t h a t ^
ig a d a p t e d t o (^(1)^(3)).
t h e labels
n
follows
from
s y m m e t r y
( o rf r o m a s i m i l a r
proof)
^ i g a d a p t e d t o ( ^ ( 3 ) ^ ( 1 ) ) . The composi.g t h e r e f o r e a d a p t e d t o ( ^ ( 1 ) ^ ( 1 ) ) .
tion ^ Q^
But this composition differs from fn only in the labels on the points of the polygons. So, there exists a
G-invariant framing F on S n such that fn is adapted
t o
( ^ ^ ) - B y Lemma 4.1, there exists a volume form
Mn o n ^n which is T n -invariant.
that
4B
- U n i t V e c t o r i n t h eH i l b e r t M e t r i c
Suppose that L is a line in R 2 , and A, B,C e L
are three points, with B separating A from C. We
define
(C _ B)(B — A)
V^M^ W —
C —A
'
,, . . , ,
, , ,
,c
, x ,,
,.
this is to be understood as (for example) the ratio
, ,
„.
,
^
„
, ^
xl
A
between the collmear vectors C - B and C - A,
, , . ,. , , ^
.
m u l t i p l i e d b y B — A.
-r-r.,, ,
, .
,, v
,N ^ .
The Hilbert metric on the line segment LA, C\ is a
.
, . T, . . ,
. . .
o .
u . ,
Riemanman metric. It is just a pomtwise multiple
^ ,. ,
, .
^i
.,
,
c ,,
rA ^
of the buclidean metric on A, G I. Ihus, it makes
x x n u x x i i
n r
^
x
xx
sense to talk about the length of vectors tangent to
, . ^ Tri, ,
, . T, .
,
rA ^
A, C , as measured in the Hubert metric. It is not
,
,
,
,
T / / . D ^x .
hard to see that VTA, S , G ) is the tangent vector,
,
IXT->
• , \ r
^
^- ^ ^
A .
based at B, oriented from A to G, which has unit
,
,, . ,, TJ. 1U ,
, .
r A rr\ ^ulength in the Hilbert metric on A, G . 1ms geo. . . ,
...
,i , ., •
r ,r, A D ^x ,
metric interpretation of V(A, S , G) shows that it is
invariant
under
transformations.
that
From
V(A,
the
B,naturality
C)projective
makes sense
of the
for
construction,
any three collinear
we see
ml
Schwartz: The Pentagram Map is Recurrent
points in MP2, even if the formula breaks down—
which happens if one of the points is infinite, or,
more generally, if the segment [A,C] intersects the
line at infinity.
525
For j = 1 , . . . , n we define the motion vectors
v
=
^
^(P4j+5,P4j+i,P4j-i)>
v2j+i =
V(p4j-3,p4j^1,pf4j+3).
(4_^
4C. The Framings
The construction for S n (3) is similar. Let Q — g3,
q7, qn^ . . . be a polygon in S n (3). This time, define
To construct our framing in S n (j) we need to con-
the motion vectors
struct, for each point in S n (?), a basis for the tangent space at that point. A point in S n u ) is a polygon in RP 2 . A tangent vector to the point is just a
collection of n vectors in the plane, one per vertex
of the polygon. To avoid using the word "tangent"
too frequently, we will call the vectors in the plane
motion vectors. Thus, a tangent vector to a polygon
is a collection of n motion vectors. The intuition is
that the collection of n motion vectors tells us how
to move the polygon, to get a nearby polygon.
Suppose we are given a polygon P, a vertex poiP,
and a single motion vector v. We can interpret v as
a tangent vector by setting all the other n — \ motion
vectors equal to 0. We call this process extension.
The extension process starts with a motion vector
and promotes it to a tangent vector by including it
as the only nonzero vector in a collection of n motion
vectors. This is what we will do in constructing our
basis for the tangent space to tn(j). We will specify
a collection of 2n motion vectors vu...,v2n'
Each
motion vector is extended to a tangent vector. Thus,
the 2n motion vectors determine 2n tangent vectors,
a basis for the tangent space.
Here is the construction for S n ( l ) . Let P = pu
p 5 , p 9 , . . . be a polygon in S n (l). Let
P'j+2 = Pj-^Pj n Pi + 4 Pj+8.
P9
Ps
...
_ T/^
W2j l
~
=
„
„' \
,
^ ^ j + s , ?4j-i, 9^-3)-
(4-2)
See examples of both conventions in Figure 4.
4D# Form of The Matrix
S n (i)
a n d
= ^ { p ) = (
} € EB(3) a n d con.
,
, ,,
,. £
-nt-w t
\
J
struct the respective framings b (1) = \V\,... j and
To
p{?>) = (
} M ^ t h e pre ceding section.
NQW consider
polygons
p = (puPt.,...)
€
ghow th&t t h g m & p
An : E n (l) —> E n (3)
is
adapted to the pair of framings (F(1),F(3)), we
o u t t h e m a t r i x dA
m written with respect to
these t w o
framings. For ease of exposition, we will
consider the case n = 7.
Let A
u b e t h e matrix entries of dAn. The expression
^ j i s a function on S n ( l ) . Figure 5 shows what
happens when we vary P along -v4, for example: as
w e slide
Pv a l o n g t h e vector -v4, keeping the other
vertices of P fixed, we see that only four vertices of
Q m o v e : <?3 slides along -w2, and so on. In terms
of t h e
matrix, this means that X4j > 0 if and only if
j = 2,3, and X4j < 0 if and only if j = 6, 7. Likewise
A5j < 0 if and only if j = 2,3, and A5j > 0 if and
only if j = 6, 7.
qn
work
_
Q5
FIGURE 4. Construction of v2j and V2J+1, for elements of E n ( l ) (left) and of E n (3) (right).
526
Experimental Mathematics, Vol. 10 (2001), No. 4
/f\—
/ I
j ^ ^ ^ ^
/J^Ji^^^
^ \ ^
'o
\
\\
I\
\ \J I
7
KI
/ \
N
v
\
/
4E
3^H\
a B oc
The entire structure of cL4n can be deduced from
symmetry and from the following formula, which we
will justify shortly:
A 9 ' 13 = [ - ^ 4 5
/I /
p>)U\^
/
/
/ \-—---\ZlZlIII^—~~^^/L
\
u:
P9\Qi-\
/========y>Pi7
\
V
y
/ /
r
\ \
/ / /
\ \
/y/
\
^42 A 5 2
A
\
\
LA43 ^53 J
A9
13
A46 A56
\\
\
\
[^47 ^57 J
A1-5
0
0
0
0
L
A 1,25
0
0
0
0 A9-5 0
0
0
5 9
0
0
0
0
A21,25
= IP9P9I a n d s = \QHQIII w h e r e t h e b a r s denote
Euclidean length. Basic plane geometry gives
Ipi3(?ii| bi7^n|
S
= \Pl3p9\ \Pl7p9\ £ +0 ( e ^
T o find A
« w en e e d t o w r i t e t h i s proportionality
constant in terms of v4 and w6 rather than in terms
of Euclidean lengths. From (4-2) we have
,
13 9
.
\
\ \
\Pl3
let e
Qu
0
A ' 0 A '
0
0
0
0 A9'- o A"-" 0
0
0 0 A 13 - 17 0 A 21 - 17 0
0 0
0 A 17 - 21 0 A 25 - 21
\
\
A25-1 1
Pl7
\
\
Variation along the vector u on the line from pi to p9
does not move q3 or q7. But u is a linear combination
of v4 and ^5; thus the linear transformation represented by A95 has a nontrivial kernel, and therefore
det(A9-5) = 6. Likewise, det(A9>13) = 0. The same
picture occurs at each vertex. Shifting the indices in
a more or less obvious way, we obtain the following
^Vr.T.^oo^v, f ^ ^ I .
" 0 A5'1 0
(4-3)
^ ^ ~— \ T ^ ^ ^ \ Q11
e \ ^ V^—-^^__^
Define
9,5
^45 1 .
L-^52/6^89 ^ 8 9 J
9 13
That det A ' = 0 implies that the formulae for any
three entries determine the fourth. We will compute
A46 = —^5^45 and omit the other two calculations,
which are similar.
In the following diagram, extracted from Figure 5,
FIGURE 5. A change in P along V4 leads to a change
in Q contained in the span of w2, W3, w6, and wj.
A
' l< ' n the Matrix
Denote by #i, 2/25 • • • > ^2n-i 5 2/2n the invariant coordinates for P , defined in Section 3C. We also define
\ ^ \
1 /V
\/
\
* ComPut'n§
bi3g7|
A
qn
6
-\Pl3qil\\qnqr\
,f
,
u ,x
a n d from (4-1) we have
, _ = -IP13O7I
Pg P9
\o7p9\\P9Pl3\
'
4
"
Q
u
J
Each 0 stands for the 2 x 2 zero matrix. The individual 2 x 2 blocks A^ have determinant 0. The
general pattern should be clear from the case n = 7.
Comparing the last three displayed equations we get
A46 = J P ^ I I P ^ T I |gnPi7l ;
l° 7 P l 3 ' l ^ 1 1 ' \pirP9\
which a short calculation identifies with —x5z45.
Schwartz: The Pentagram Map is Recurrent
4F. Computing the Determinant
The arrangement of the blocks A5'9, A 13 ' 9 , A9'5 and
^9,13 j g
\
\
A42 A52
\
\
\
\
n
n
\
\
A24
\
A25
A34
U
U
AQ4
\
n
n
\
\
U
U
A65
A75
, n
\A/p define
\
A46
A56
\
\
represented by lightly colored squares, uniquely determine the variables in the below-diagonal blocks
A-7'4^, which are represented by black squares. The
monomials are signed, so that Z is a positive sum
. -,
over all these monomials.
We can encode each one of these monomials by
J
A74
A35
\
527
*
a pair of binary strings (a, b). Both a and b have
^
, , i
IT
length 6. The 1 bits in a indicate the columns in
°
which the light shaded square is on the right half
of the 2 x 2 block. The 1 bits in b indicate the
TTT
]
rows in which the light shaded square are on the
to
det I X<24 A ? 4 1
P h a l f o f the 2 x 2 block. For instance, the first
A
A
L ^
75 J
picture is encoded by (000000,000000). The second
v =
H
=
2
A42A57
'
A24A75
'
picture is encoded by (010100,010010). Note that
and D2 = A56A65; moreover we define H2+i, V2+i and
(000000,000000) = f[ Dk.
D2+i by adding 2i to all of the indices in the Xjk. For
If a has a 0 in the fcth position, let ak be the string
instance, D\ = A34A43. Equation (4-3) gives
obtained by changing this bit to a 1. For instance
TT \r
M
n
(010010)3 = (011010). We do not define ak if a has a
n2
— v2 — 1 / 2 4 5 ;
^ 2 — ^45^67-
; .
Hence [ I # ^ A = 1- T o finish t h e P r o o f o f
Volume Lemma we show an auxiliary result:
Lemma 4.2. det(dAn) = f l ^ i HiviA-
the
,,
7
,u
...
^T
-,
,1
, n
...
1 in the fetn position. We make the same definition
for b. We have the following basic identity, which
u s e s t h e fact t h a t d e t tfj = 0 .
(a, b) + (a*., b) — (a, 6 ) ^ ;
Proof. For ease of exposition, we take n = 6. The
polynomial Z = det(dJi 6 ) has n\ signed monomials.
The monomials in Z are only nonzero when all variables have been chosen from the nonzero 2x2 blocks.
Say that a monomial in Z is bad if it contains two
variables picked from the same nonzero block, and
otherwise good. The bad monomials cancel in pairs,
since the determinant of each block is 0.
Figure 6 illustrates a coding for the good monomials. Each good monomial is specified by choosing
one variable arbitrarily from each of the 6 abovediagonal blocks A-7'-7"4. These choices, which are
0
0
0
0
0
0
0
hn
zH
(4-4)
(a, b) + (a, bk) = (a, 6)T4.
Let * stand for either a 0 or a 1. Let Si:j be the set
of monomials of the form (* • • • 0, * • • • 0), such that
there are i copies of * in the first slot, and j copies
of * in the second slot. For example, 5 2 5 consists of
the set of all monomials having the form
(**0000, *****0).
Obviously, 566 is the set of all monomials.
0
1 0
1 0
0
°
rn
FIGURE 6. Coding for the good monomials.
zn
528
Experimental Mathematics, Vol. 10 (2001), No. 4
Formula (4-4) gives
REFERENCES
det(dA6) = Y^(a,6) = i? 5 y^(a,&)
356
s&6
-p-p
^-^v
(a,6) = ••• = j | # ; 2 ^ ( a , & )
E
^46
s
06
_ y TT JJ W a b) =
5
11
*Z^v , ;
= Y[ViY[Hi^2(a,b)
s00
•••
= Jl^HiViDi. D
[Arnol'd 1978] V. I. Arnol'd, Mathematical methods
o/ classical mechanics, Graduate Texts in Math. 60,
Springer, New York, 1978. Second edition, 1989.
[Hilbert and Cohn-Vossen 1950] D. Hilbert and S. CohnVossen, Geometry and the Imagination, Chelsea, New
York^ 195Q
[Schwartz 1992] R. Schwartz, "The pentagram map",
Experiment. Math. 1:1 (1992), 71-81.
Richard Evan Schwartz, Mathematics Department, University of Maryland, College Park, MD 20742
(res@math.umd.edu)
Received December 27, 1999; accepted in revised form March 5, 2001