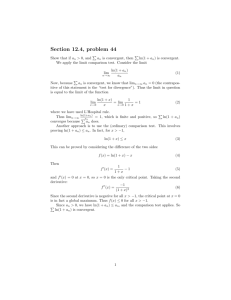
Document 10419859
advertisement

Module MA2321: Analysis in Several Real
Variables
Michaelmas Term 2015
Section 6
D. R. Wilkins
Copyright c David R. Wilkins 1988–2015
Contents
6 Euclidean Spaces, Continuity, and
Open Sets
6.1 Basic Properties of Vectors and Norms . . . . . . . . . . . .
6.2 Convergence of Sequences in Euclidean Spaces . . . . . . . .
6.3 Continuity of Functions of Several Real Variables . . . . . .
6.4 Limits of Functions of Several Real Variables . . . . . . . . .
6.5 Open Sets in Euclidean Spaces . . . . . . . . . . . . . . . . .
6.6 Closed Sets in Euclidean Spaces . . . . . . . . . . . . . . . .
6.7 Continuous Functions and Open Sets . . . . . . . . . . . . .
6.8 The Multidimensional Bolzano-Weierstrass Theorem . . . . .
6.9 The Extreme Value Theorem for Functions of Several Real
Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.10 Uniform Continuity for Functions of Several Real Variables .
i
.
.
.
.
.
.
.
.
73
73
74
75
78
79
83
84
85
. 87
. 89
6
6.1
Euclidean Spaces, Continuity, and
Open Sets
Basic Properties of Vectors and Norms
We denote by Rn the set consisting of all n-tuples (x1 , x2 , . . . , xn ) of real
numbers. The set Rn represents n-dimensional Euclidean space (with respect
to the standard Cartesian coordinate system). Let x and y be elements of
Rn , where
x = (x1 , x2 , . . . , xn ), y = (y1 , y2 , . . . , yn ),
and let λ be a real number. We define
x+y
x−y
λx
x·y
=
=
=
=
(x1 + y1 , x2 + y2 , . . . , xn + yn ),
(x1 − y1 , x2 − y2 , . . . , xn − yn ),
(λx1 , λx2 , . . . , λxn ),
x1 y1 + x2 y2 + · · · + xn yn ,
q
x21 + x22 + · · · + x2n .
|x| =
The quantity x · y is the scalar product (or inner product) of x and y, and
the quantity |x| is the Euclidean norm of x. Note that |x|2 = x · x. The
Euclidean distance between two points x and y of Rn is defined to be the
Euclidean norm |y − x| of the vector y − x.
Proposition 6.1 (Schwarz’s Inequality) Let x and y be elements of Rn .
Then |x · y| ≤ |x||y|.
Proof We note that |λx + µy|2 ≥ 0 for all real numbers λ and µ. But
|λx + µy|2 = (λx + µy).(λx + µy) = λ2 |x|2 + 2λµx · y + µ2 |y|2 .
Therefore λ2 |x|2 + 2λµx · y + µ2 |y|2 ≥ 0 for all real numbers λ and µ. In
particular, suppose that λ = |y|2 and µ = −x · y. We conclude that
|y|4 |x|2 − 2|y|2 (x · y)2 + (x · y)2 |y|2 ≥ 0,
so that (|x|2 |y|2 − (x · y)2 ) |y|2 ≥ 0. Thus if y 6= 0 then |y| > 0, and hence
|x|2 |y|2 − (x · y)2 ≥ 0.
But this inequality is trivially satisfied when y = 0. Thus |x · y| ≤ |x||y|, as
required.
73
Corollary 6.2 (Triangle Inequality) Let x and y be elements of Rn . Then
|x + y| ≤ |x| + |y|.
Proof Using Schwarz’s Inequality, we see that
|x + y|2 = (x + y).(x + y) = |x|2 + |y|2 + 2x · y
≤ |x|2 + |y|2 + 2|x||y| = (|x| + |y|)2 .
The result follows directly.
It follows immediately from the Triangle Inequality (Corollary 6.2) that
|z − x| ≤ |z − y| + |y − x|
for all points x, y and |z| of Rn . This important inequality expresses the
geometric fact the the length of any triangle in a Euclidean space is less than
or equal to the sum of the lengths of the other two sides.
6.2
Convergence of Sequences in Euclidean Spaces
Definition A sequence x1 , x2 , x3 , . . . of points in Rn is said to converge to a
point p if and only if the following criterion is satisfied:—
given any real number ε satisfying ε > 0 there exists some positive
integer N such that |p − xj | < ε whenever j ≥ N .
We refer to p as the limit lim xj of the sequence x1 , x2 , x3 , . . . .
j→+∞
Lemma 6.3 Let p be a point of Rn , where p = (p1 , p2 , . . . , pn ). Then a
sequence x1 , x2 , x3 , . . . of points in Rn converges to p if and only if the ith
components of the elements of this sequence converge to pi for i = 1, 2, . . . , n.
Proof Let xji and pi denote the ith components of xj and p, where p =
lim xj . Then |xji − pi | ≤ |xj − p| for all j. It follows directly from the
j→+∞
definition of convergence that if xj → p as j → +∞ then xji → pi as
j → +∞.
Conversely suppose that, for each i, xji → pi as j → +∞. Let ε > 0 be
given.
√ Then there exist positive integers N1 , N2 , . . . , Nn such that |xji − pi | <
ε/ n whenever j ≥ Ni . Let N be the maximum of N1 , N2 , . . . , Nn . If j ≥ N
then
n
X
√
2
|xj − p| =
(xji − pi )2 < n(ε/ n)2 = ε2 ,
i=1
so that xj → p as j → +∞.
74
Definition A sequence x1 , x2 , x3 , . . . of points in Rn is said to be a Cauchy
sequence if and only if the following criterion is satisfied:—
given any real number ε satisfying ε > 0 there exists some positive
integer N such that |xj − xk | < ε whenever j ≥ N and k ≥ N .
Lemma 6.4 A sequence of points in Rn is convergent if and only if it is a
Cauchy sequence.
Proof Let x1 , x2 , x3 , . . . be a sequence of points of Rn converging to some
point p. Let ε > 0 be given. Then there exists some positive integer N such
that |xj − p| < 21 ε whenever j ≥ N . If j ≥ N and k ≥ N then
|xj − xk | ≤ |xj − p| + |p − xk | < 12 ε + 21 ε = ε,
by the Triangle Inequality. Thus every convergent sequence in Rn is a Cauchy
sequence.
Now let x1 , x2 , x3 , . . . be a Cauchy sequence in Rn . Then the ith components of the elements of this sequence constitute a Cauchy sequence of
real numbers. This Cauchy sequence must converge to some real number
pi , by Cauchy’s Criterion for Convergence (Theorem 2.7). It follows from
Lemma 6.3 that the Cauchy sequence x1 , x2 , x3 , . . . converges to the point p,
where p = (p1 , p2 , . . . , pn ).
6.3
Continuity of Functions of Several Real Variables
Definition Let X and Y be a subsets of Rm and Rn respectively. A function
f : X → Y from X to Y is said to be continuous at a point p of X if and
only if the following criterion is satisfied:—
given any strictly positive real number ε, there exists some strictly
positive real number δ such that |f (x) − f (p)| < ε whenever
x ∈ X satisfies |x − p| < δ.
The function f : X → Y is said to be continuous on X if and only if it is
continuous at every point p of X.
Lemma 6.5 Let X, Y and Z be subsets of Rm , Rn and Rk respectively, and
let f : X → Y and g: Y → Z be functions satisfying f (X) ⊂ Y . Suppose that
f is continuous at some point p of X and that g is continuous at f (p). Then
the composition function g ◦ f : X → Z is continuous at p.
75
Proof Let ε > 0 be given. Then there exists some η > 0 such that |g(y) −
g(f (p))| < ε for all y ∈ Y satisfying |y − f (p)| < η. But then there exists
some δ > 0 such that |f (x) − f (p)| < η for all x ∈ X satisfying |x − p| < δ.
It follows that |g(f (x)) − g(f (p))| < ε for all x ∈ X satisfying |x − p| < δ,
and thus g ◦ f is continuous at p, as required.
Lemma 6.6 Let X and Y be a subsets of Rm and Rn respectively, and let
f : X → Y be a continuous function from X to Y . Let x1 , x2 , x3 , . . . be a
sequence of points of X which converges to some point p of X. Then the
sequence f (x1 ), f (x2 ), f (x3 ), . . . converges to f (p).
Proof Let ε > 0 be given. Then there exists some δ > 0 such that |f (x) −
f (p)| < ε for all x ∈ X satisfying |x − p| < δ, since the function f is
continuous at p. Also there exists some positive integer N such that |xj −p| <
δ whenever j ≥ N , since the sequence x1 , x2 , x3 , . . . converges to p. Thus if
j ≥ N then |f (xj ) − f (p)| < ε. Thus the sequence f (x1 ), f (x2 ), f (x3 ), . . .
converges to f (p), as required.
Let X and Y be a subsets of Rm and Rn respectively, and let f : X → Y
be a function from X to Y . Then
f (x) = (f1 (x), f2 (x), . . . , fn (x))
for all x ∈ X, where f1 , f2 , . . . , fn are functions from X to R, referred to as
the components of the function f .
Proposition 6.7 Let X and Y be a subsets of Rm and Rn respectively, and
let p ∈ X. A function f : X → Y is continuous at the point p if and only if
its components are all continuous at p.
Proof Note that the ith component fi of f is given by fi = πi ◦ f , where
πi : Rn → R is the continuous function which maps (y1 , y2 , . . . , yn ) ∈ Rn
onto its ith coordinate yi . Now any composition of continuous functions is
continuous, by Lemma 6.5. Thus if f is continuous at p, then so are the
components of f .
Conversely suppose that the components of f are continuous at p ∈ X.
Let ε > 0 be given. Then√there exist positive real numbers δ1 , δ2 , . . . , δn such
that |fi (x) − fi (p)| < ε/ n for x ∈ X satisfying |x − p| < δi . Let δ be the
minimum of δ1 , δ2 , . . . , δn . If x ∈ X satisfies |x − p| < δ then
|f (x) − f (p)|2 =
n
X
|fi (x) − fi (p)|2 < ε2 ,
i=1
and hence |f (x) − f (p)| < ε. Thus the function f is continuous at p, as
required.
76
Lemma 6.8 The functions s: R2 → R and m: R2 → R defined by s(x, y) =
x + y and m(x, y) = xy are continuous.
Proof Let (u, v) ∈ R2 . We first show that s: R2 → R is continuous at (u, v).
Let ε > 0 be given. Let δ = 12 ε. If (x, y) is any point of R2 whose distance
from (u, v) is less than δ then |x − u| < δ and |y − v| < δ, and hence
|s(x, y) − s(u, v)| = |x + y − u − v| ≤ |x − u| + |y − v| < 2δ = ε.
This shows that s: R2 → R is continuous at (u, v).
Next we show that m: R2 → R is continuous at (u, v). Now
m(x, y) − m(u, v) = xy − uv = (x − u)(y − v) + u(y − v) + (x − u)v.
for all points (x, y) of R2 . Thus if the distance from (x, y) to (u, v) is less
than δ then |x − u| < δ and |y − v| < δ, and hence |m(x, y) − m(u, v)| <
δ 2 + (|u| + |v|)δ. Let ε > 0 is given. If δ > 0 is chosen to be the minimum of
1 and ε/(1 + |u| + |v|) then δ 2 + (|u| + |v|)δ < (1 + |u| + |v|)δ < ε, and thus
|m(x, y) − m(u, v)| < ε for all points (x, y) of R2 whose distance from (u, v)
is less than δ. This shows that p: R2 → R is continuous at (u, v).
Proposition 6.9 Let X be a subset of Rn , and let f : X → R and g: X → R
be continuous functions from X to R. Then the functions f + g, f − g and
f · g are continuous. If in addition g(x) 6= 0 for all x ∈ X then the quotient
function f /g is continuous.
Proof Note that f + g = s ◦ h and f · g = m ◦ h, where h: X → R2 ,
s: R2 → R and m: R2 → R are given by h(x) = (f (x), g(x)), s(u, v) = u + v
and m(u, v) = uv for all x ∈ X and u, v ∈ R. It follows from Proposition 6.7,
Lemma 6.8 and Lemma 6.5 that f + g and f · g are continuous, being compositions of continuous functions. Now f − g = f + (−g), and both f and
−g are continuous. Therefore f − g is continuous.
Now suppose that g(x) 6= 0 for all x ∈ X. Note that 1/g = r ◦ g, where
r: R \ {0} → R is the reciprocal function, defined by r(t) = 1/t. Now the
reciprocal function r is continuous. Thus the function 1/g is a composition
of continuous functions and is thus continuous. But then, using the fact that
a product of continuous real-valued functions is continuous, we deduce that
f /g is continuous.
Example Consider the function f : R2 \ {(0, 0)} → R2 defined by
x
−y
f (x, y) =
,
.
x2 + y 2 x2 + y 2
The continuity of the components of the function f follows from straightforward applications of Proposition 6.9. It then follows from Proposition 6.7
that the function f is continuous on R2 \ {(0, 0)}.
77
6.4
Limits of Functions of Several Real Variables
Definition Let X be a subset of m-dimensional Euclidean space Rm , and
let p ∈ Rm . The point p is said to be a limit point of the set X if, given any
δ > 0, there exists some point x of X such that 0 < |x − p| < δ.
It follows easily from the definition of convergence of sequences of points
in Euclidean space that if X is a subset of m-dimensional Euclidean space Rm
and if p is a point of Rm then the point p is a limit point of the set X if
and only if there exists an infinite sequence x1 , x2 , x3 , . . . of points of X, all
distinct from the point p, such that lim xj = p.
j→+∞
Definition Let X be a subset of m-dimensional Euclidean space Rm , let
f : X → Rn be a function mapping the set X into n-dimensional Euclidean
space Rn , let p be a limit point of the set X, and let q be a point Rn . The
point q is said to be the limit of f (x), as x tends to p in X, if and only if
the following criterion is satisfied:—
given any strictly positive real number ε, there exists some strictly
positive real number δ such that |f (x) − q| < ε whenever x ∈ X
satisfies 0 < |x − p| < δ.
Let X be a subset of m-dimensional Euclidean space Rm , let f : X → Rn
be a function mapping the set X into n-dimensional Euclidean space Rn ,
let p be a limit point of the set X, and let q be a point Rn . If q is the
limit of f (x) as x tends to p in X then we can denote this fact by writing
lim f (x) = q.
x→p
Proposition 6.10 Let X be a subset of m-dimensional Euclidean space Rm ,
let f : X → Rn be a function mapping the set X into n-dimensional Euclidean
space Rn , let p be a limit point of the set X, and let q be a point Rn . Let
X̃ = X ∪ {p}, and let f˜: X̃ → Rn be defined such that
f (x) if x 6= p;
f˜(x) =
q
if x = p.
Then lim f (x) = q if and only if the function f˜ is continuous at p.
x→p
Proof The result follows directly on comparing the relevant definitions.
Corollary 6.11 Let X be a subset of m-dimensional Euclidean space Rm ,
let f : X → Rn be a function mapping the set X into n-dimensional Euclidean
space Rn , and let p be a point of the set X that is also a limit point of X. Then
the function f is continuous at the point p if and only if lim f (x) = f (p).
x→p
78
Let X be a subset of m-dimensional Euclidean space Rm , and let p be a
point of the set X. Suppose that the point p is not a limit point of the set X.
Then there exists some strictly positive real number δ0 such that |x − p| ≥ δ0
for all x ∈ X. The point p is then said to be an isolated point of X.
Let X be a subset of m-dimensional Euclidean space Rm . The definition
of continuity then ensures that any function f : X → Rn mapping the set X
into n-dimensional Euclidean space Rn is continuous at any isolated point of
its domain X.
Corollary 6.12 Let X be a subset of m-dimensional Euclidean space Rm ,
let f : X → R and g: X → R be real-valued functions on X, and let p be a
limit point of the set X. Suppose that lim f (x) and lim g(x) both exist. Then
x→p
x→p
so do lim (f (x) + g(x)), lim (f (x) − g(x)) and lim (f (x)g(x)), and moreover
x→p
x→p
x→p
lim (f (x) + g(x)) = lim f (x) + lim g(x),
x→p
x→p
x→p
lim (f (x) − g(x)) = lim f (x) − lim g(x),
x→p
x→p
x→p
lim (f (x)g(x)) = lim f (x) × lim g(x),
x→p
x→p
x→p
If moreover g(x) 6= 0 for all x ∈ X and limx→p g(x) 6= 0 then
lim f (x)
f (x)
x→p
=
.
x→p g(x)
lim g(x)
lim
x→p
Proof Let X̃ = X ∪ {p}, and let f˜: X̃ → R and g̃: X̃ → R be defined such
that
f
(x)
if
x
=
6
p;
g(x) if x 6= p;
f˜(x) =
g̃(x) =
,
l
if x = p.
m
if x = p.
where l = lim f (x) and m = lim g(x). Then the functions f˜ and g̃ are
x→p
x→p
continuous at p. The result therefore follows on applying Proposition 6.9.
6.5
Open Sets in Euclidean Spaces
Let X be a subset of Rn . Given a point p of X and a non-negative real
number r, the open ball BX (p, r) in X of radius r about p is defined to be
the subset of X given by
BX (p, r) = {x ∈ X : |x − p| < r}.
79
(Thus BX (p, r) is the set consisting of all points of X that lie within a sphere
of radius r centred on the point p.)
Definition Let X be a subset of Rn . A subset V of X is said to be open
in X if and only if, given any point p of V , there exists some δ > 0 such that
BX (p, δ) ⊂ V .
By convention, we regard the empty set ∅ as being an open subset of X.
(The criterion given above is satisfied vacuously in the case when V is the
empty set.)
In particular, a subset V of Rn is said to be an open set (in Rn ) if and only
if, given any point p of V , there exists some δ > 0 such that B(p, δ) ⊂ V ,
where B(p, r) = {x ∈ Rn : |x − p| < r}.
Example Let H = {(x, y, z) ∈ R3 : z > c}, where c is some real number.
Then H is an open set in R3 . Indeed let p be a point of H. Then p = (u, v, w),
where w > c. Let δ = w − c. If the distance from a point (x, y, z) to the
point (u, v, w) is less than δ then |z − w| < δ, and hence z > c, so that
(x, y, z) ∈ H. Thus B(p, δ) ⊂ H, and therefore H is an open set.
The previous example can be generalized. Given any integer i between 1
and n, and given any real number ci , the sets
{(x1 , x2 , . . . , xn ) ∈ Rn : xi > ci },
{(x1 , x2 , . . . , xn ) ∈ Rn : xi < ci }
are open sets in Rn .
Example Let U be an open set in Rn . Then for any subset X of Rn , the
intersection U ∩ X is open in X. (This follows directly from the definitions.)
Thus for example, let S 2 be the unit sphere in R3 , given by
S 2 = {(x, y, z) ∈ R3 : x2 + y 2 + z 2 = 1}
and let N be the subset of S 2 given by
N = {(x, y, z) ∈ Rn : x2 + y 2 + z 2 = 1 and z > 0}.
Then N is open in S 2 , since N = H ∩ S 2 , where H is the open set in R3
given by
H = {(x, y, z) ∈ R3 : z > 0}.
Note that N is not itself an open set in R3 . Indeed the point (0, 0, 1) belongs
to N , but, for any δ > 0, the open ball (in R3 of radius δ about (0, 0, 1)
contains points (x, y, z) for which x2 + y 2 + z 2 6= 1. Thus the open ball of
radius δ about the point (0, 0, 1) is not a subset of N .
80
Lemma 6.13 Let X be a subset of Rn , and let p be a point of X. Then, for
any positive real number r, the open ball BX (p, r) in X of radius r about p
is open in X.
Proof Let x be an element of BX (p, r). We must show that there exists
some δ > 0 such that BX (x, δ) ⊂ BX (p, r). Let δ = r − |x − p|. Then δ > 0,
since |x − p| < r. Moreover if y ∈ BX (x, δ) then
|y − p| ≤ |y − x| + |x − p| < δ + |x − p| = r,
by the Triangle Inequality, and hence y ∈ BX (p, r). Thus BX (x, δ) ⊂
BX (p, r). This shows that BX (p, r) is an open set, as required.
Lemma 6.14 Let X be a subset of Rn , and let p be a point of X. Then, for
any non-negative real number r, the set {x ∈ X : |x − p| > r} is an open set
in X.
Proof Let x be a point of X satisfying |x − p| > r, and let y be any point
of X satisfying |y − x| < δ, where δ = |x − p| − r. Then
|x − p| ≤ |x − y| + |y − p|,
by the Triangle Inequality, and therefore
|y − p| ≥ |x − p| − |y − x| > |x − p| − δ = r.
Thus BX (x, δ) is contained in the given set. The result follows.
Proposition 6.15 Let X be a subset of Rn . The collection of open sets in X
has the following properties:—
(i) the empty set ∅ and the whole set X are both open in X;
(ii) the union of any collection of open sets in X is itself open in X;
(iii) the intersection of any finite collection of open sets in X is itself open
in X.
Proof The empty set ∅ is an open set by convention. Moreover the definition
of an open set is satisfied trivially by the whole set X. This proves (i).
Let A be any collection of open sets in X, and let U denote the union of
all the open sets belonging to A. We must show that U is itself open in X.
Let x ∈ U . Then x ∈ V for some set V belonging to the collection A. It
81
follows that there exists some δ > 0 such that BX (x, δ) ⊂ V . But V ⊂ U ,
and thus BX (x, δ) ⊂ U . This shows that U is open in X. This proves (ii).
Finally let V1 , V2 , V3 , . . . , Vk be a finite collection of subsets of X that
are open in X, and let V denote the intersection V1 ∩ V2 ∩ · · · ∩ Vk of these
sets. Let x ∈ V . Now x ∈ Vj for j = 1, 2, . . . , k, and therefore there
exist strictly positive real numbers δ1 , δ2 , . . . , δk such that BX (x, δj ) ⊂ Vj for
j = 1, 2, . . . , k. Let δ be the minimum of δ1 , δ2 , . . . , δk . Then δ > 0. (This is
where we need the fact that we are dealing with a finite collection of sets.)
Now BX (x, δ) ⊂ BX (x, δj ) ⊂ Vj for j = 1, 2, . . . , k, and thus BX (x, δ) ⊂ V .
Thus the intersection V of the sets V1 , V2 , . . . , Vk is itself open in X. This
proves (iii).
Example The set {(x, y, z) ∈ R3 : x2 + y 2 + z 2 < 4 and z > 1} is an open
set in R3 , since it is the intersection of the open ball of radius 2 about the
origin with the open set {(x, y, z) ∈ R3 : z > 1}.
Example The set {(x, y, z) ∈ R3 : x2 + y 2 + z 2 < 4 or z > 1} is an open set
in R3 , since it is the union of the open ball of radius 2 about the origin with
the open set {(x, y, z) ∈ R3 : z > 1}.
Example The set
{(x, y, z) ∈ R3 : (x − n)2 + y 2 + z 2 <
1
4
for some n ∈ Z}
is an open set in R3 , since it is the union of the open balls of radius
the points (n, 0, 0) for all integers n.
1
2
about
Example For each positive integer k, let
Vk = {(x, y, z) ∈ R3 : k 2 (x2 + y 2 + z 2 ) < 1}.
Now each set Vk is an open ball of radius 1/k about the origin, and is therefore
an open set in R3 . However the intersection of the sets Vk for all positive
integers k is the set {(0, 0, 0)}, and thus the intersection of the sets Vk for all
positive integers k is not itself an open set in R3 . This example demonstrates
that infinite intersections of open sets need not be open.
Lemma 6.16 A sequence x1 , x2 , x3 , . . . of points in Rn converges to a point p
if and only if, given any open set U which contains p, there exists some
positive integer N such that xj ∈ U for all j satisfying j ≥ N .
82
Proof Suppose that the sequence x1 , x2 , x3 , . . . has the property that, given
any open set U which contains p, there exists some positive integer N such
that xj ∈ U whenever j ≥ N . Let ε > 0 be given. The open ball B(p, ε) of
radius ε about p is an open set by Lemma 6.13. Therefore there exists some
positive integer N such that xj ∈ B(p, ε) whenever j ≥ N . Thus |xj −p| < ε
whenever j ≥ N . This shows that the sequence converges to p.
Conversely, suppose that the sequence x1 , x2 , x3 , . . . converges to p. Let
U be an open set which contains p. Then there exists some ε > 0 such that
the open ball B(p, ε) of radius ε about p is a subset of U . Thus there exists
some ε > 0 such that U contains all points x of X that satisfy |x − p| < ε.
But there exists some positive integer N with the property that |xj − p| < ε
whenever j ≥ N , since the sequence converges to p. Therefore xj ∈ U
whenever j ≥ N , as required.
6.6
Closed Sets in Euclidean Spaces
Let X be a subset of Rn . A subset F of X is said to be closed in X if and
only if its complement X \ F in X is open in X. (Recall that X \ F = {x ∈
X : x 6∈ F }.)
Example The sets {(x, y, z) ∈ R3 : z ≥ c}, {(x, y, z) ∈ R3 : z ≤ c}, and
{(x, y, z) ∈ R3 : z = c} are closed sets in R3 for each real number c, since the
complements of these sets are open in R3 .
Example Let X be a subset of Rn , and let x0 be a point of X. Then the
sets {x ∈ X : |x − x0 | ≤ r} and {x ∈ X : |x − x0 | ≥ r} are closed for
each non-negative real number r. In particular, the set {x0 } consisting of
the single point x0 is a closed set in X. (These results follow immediately
using Lemma 6.13 and Lemma 6.14 and the definition of closed sets.)
Let A be some collection of subsets of a set X. Then
[
\
\
[
X\
S=
(X \ S),
X\
S=
(X \ S)
S∈A
S∈A
S∈A
S∈A
(i.e., the complement of the union of some collection of subsets of X is the
intersection of the complements of those sets, and the complement of the
intersection of some collection of subsets of X is the union of the complements of those sets). The following result therefore follows directly from
Proposition 6.15.
Proposition 6.17 Let X be a subset of Rn . The collection of closed sets
in X has the following properties:—
83
(i) the empty set ∅ and the whole set X are both closed in X;
(ii) the intersection of any collection of closed sets in X is itself closed in
X;
(iii) the union of any finite collection of closed sets in X is itself closed in
X.
Lemma 6.18 Let X be a subset of Rn , and let F be a subset of X which is
closed in X. Let x1 , x2 , x3 , . . . be a sequence of points of F which converges
to a point p of X. Then p ∈ F .
Proof The complement X \ F of F in X is open, since F is closed. Suppose
that p were a point belonging to X \F . It would then follow from Lemma 6.16
that xj ∈ X \ F for all values of j greater than some positive integer N ,
contradicting the fact that xj ∈ F for all j. This contradiction shows that p
must belong to F , as required.
6.7
Continuous Functions and Open Sets
Let X and Y be subsets of Rm and Rn , and let f : X → Y be a function
from X to Y . We recall that the function f is continuous at a point p of X
if, given any ε > 0, there exists some δ > 0 such that |f (u) − f (p)| < ε
for all points u of X satisfying |u − p| < δ. Thus the function f : X → Y
is continuous at p if and only if, given any ε > 0, there exists some δ > 0
such that the function f maps BX (p, δ) into BY (f (p), ε) (where BX (p, δ)
and BY (f (p), ε) denote the open balls in X and Y of radius δ and ε about
p and f (p) respectively).
Given any function f : X → Y , we denote by f −1 (V ) the preimage of a
subset V of Y under the map f , defined by f −1 (V ) = {x ∈ X : f (x) ∈ V }.
Proposition 6.19 Let X and Y be subsets of Rm and Rn , and let f : X → Y
be a function from X to Y . The function f is continuous if and only if f −1 (V )
is open in X for every open subset V of Y .
Proof Suppose that f : X → Y is continuous. Let V be an open set in Y .
We must show that f −1 (V ) is open in X. Let p ∈ f −1 (V ). Then f (p) ∈
V . But V is open, hence there exists some ε > 0 with the property that
BY (f (p), ε) ⊂ V . But f is continuous at p. Therefore there exists some
δ > 0 such that f maps BX (p, δ) into BY (f (p), ε) (see the remarks above).
Thus f (x) ∈ V for all x ∈ BX (p, δ), showing that BX (p, δ) ⊂ f −1 (V ). This
shows that f −1 (V ) is open in X for every open set V in Y .
84
Conversely suppose that f : X → Y is a function with the property that
f −1 (V ) is open in X for every open set V in Y . Let p ∈ X. We must
show that f is continuous at p. Let ε > 0 be given. Then BX (f (p), ε) is
an open set in Y , by Lemma 6.13, hence f −1 (BY (f (p), ε)) is an open set
in X which contains p. It follows that there exists some δ > 0 such that
BX (p, δ) ⊂ f −1 (BY (f (p), ε)). Thus, given any ε > 0, there exists some
δ > 0 such that f maps BX (p, δ) into BY (f (p), ε). We conclude that f is
continuous at p, as required.
Let X be a subset of Rn , let f : X → R be continuous, and let c be some
real number. Then the sets {x ∈ X : f (x) > c} and {x ∈ X : f (x) < c}
are open in X, and, given real numbers a and b satisfying a < b, the set
{x ∈ X : a < f (x) < b} is open in X.
6.8
The Multidimensional Bolzano-Weierstrass Theorem
A sequence x1 , x2 , x3 , . . . of points in Rn is said to be bounded if there exists
some constant K such that |xj | ≤ K for all j.
Example Let
p
2π log j
j
(xj , yj , zj ) = sin(π j), (−1) , cos
log 2
for j = 1, 2, 3, . . .. This sequence of points in R3 is bounded, because the
components of its members all take values between −1 and 1. Moreover
xj = 0 whenever j is the square of a positive integer, yj = 1 whenever j is
even and zj = 1 whenever j is a power of two.
The infinite sequence x1 , x2 , x3 , . . . has a convergent subsequence
x1 , x4 , x9 , x16 , x25 , . . .
which includes those xj for which j is the square of a positive integer. The
corresponding subsequence y1 , y4 , y9 , . . . of y1 , y2 , y3 , . . . is not convergent, because its values alternate between 1 and −1. However this subsequence is
bounded, and we can extract from this sequence a convergent subsequence
y4 , y16 , y36 , y64 , y100 , . . .
which includes those xj for which j is the square of an even positive integer.
The subsequence
x4 , x16 , x36 , y64 , y100 , . . .
85
is also convergent, because it is a subsequence of a convergent subsequence.
However the corresponding subsequence
z4 , z16 , z36 , z64 , z100 , . . .
does not converge. (Indeed zj = 1 when j is an even power of 2, but
zj = cos(2π log(9)/ log(2)) when j = 9 × 22p for some positive integer p.)
However this subsequence is bounded, and we can extract from it a convergent subsequence
z4 , z16 , z64 , z256 , z1024 , . . .
which includes those xj for which j is equal to two raised to the power of
an even positive integer. Then the first, second and third components of the
following subsequence
(x4 , y4 , z4 ), (x16 , y16 , z16 ), (x64 , y64 , z64 ), (x256 , y256 , z256 ), . . .
of the original sequence of points in R3 converge, and it therefore follows
from Lemma 6.3 that this sequence is a convergent subsequence of the given
sequence of points in R3 .
Example Let
1
0
xj =
−1
0
and
0
1
yj =
0
−1
if
if
if
if
if
if
if
if
j
j
j
j
j
j
j
j
= 4k for some integer k
= 4k + 1 for some integer k
= 4k + 2 for some integer k
= 4k + 3 for some integer k
= 4k for some integer k,
= 4k + 1 for some integer k,
,
= 4k + 2 for some integer k,
= 4k + 3 for some integer k,
and let uj = (xj , yj ) for j = 1, 2, 3, 4, . . .. Then the first components xj for
which the index j is odd constitute a convergent sequence x1 , x3 , x5 , x7 , . . .
of real numbers, and the second components yj for which the index j is even
also constitute a convergent sequence y2 , y4 , y6 , y8 , . . . of real numbers.
However one would not obtain a convergent subsequence of u1 , u2 , u3 , . . .
simply by selecting those indices j for which xj is in the convergent subsequence x1 , x3 , x5 , . . . and yj is in the convergent subsequence y2 , y4 , y6 , . . .,
because there no values of the index j for which xj and yj both belong to the
respective subsequences. However the one-dimensional Bolzano-Weierstrass
Theorem (Theorem 2.5) guarantees that there is a convergent subsequence
86
of y1 , y3 , y5 , y7 , . . ., and indeed y1 , y5 , y9 , y13 , . . . is such a convergent subsequence. This yields a convergent subsequence u1 , u5 , u9 , u13 , . . . of the given
bounded sequence of points in R2 .
Theorem 6.20 Every bounded sequence of points in Rn has a convergent
subsequence.
Proof We prove the result by induction on the dimension n of the Euclidean
space Rn that contains the infinite sequence in question. It follows from the
one-dimensional Bolzano-Weierstrass Theorem (Theorem 2.5) that the theorem is true when n = 1. Suppose that n > 1, and that every bounded sequence in Rn−1 has a convergent subsequence. Let x1 , x2 , x3 , . . . be a bounded
infinite sequence of elements of Rn , and let xj,i denote the ith component of
xj for i = 1, 2, . . . , n and for all positive integers j. The induction hypothesis requires that all bounded sequences in Rn−1 contain convergent subsequences. Therefore there exist real numbers p1 , p2 , . . . , pn−1 and an increasing
sequence m1 , m2 , m3 , . . . of positive integers such that lim xmk ,i = pi for i =
k→+∞
1, 2, . . . , n − 1. The nth components xm1 ,n , xm2 ,n , xm3 ,n , . . . of the members of
the subsequence xm1 , xm2 , xm3 , . . . then constitute a bounded sequence of real
numbers. It follows from the one-dimensional Bolzano-Weierstrass Theorem
(Theorem 2.5) that there exists an increasing sequence k1 , k2 , k3 , . . . of positive integers for which the sequence xmk1 ,n , xmk2 ,n , xmk3 ,n , . . . converges. Let
sj = mkj for all positive integers j, and let pn = lim xmkj ,n = lim xsj ,n .
j→+∞
j→+∞
Then the sequence xs1 ,i , xs2 ,i , xs3 ,i , . . . converges for values of i between 1 and
n−1, because it is a subquence of the convergent sequence xm1 ,i , xm2 ,i , xm3 ,i , . . ..
Moreover xs1 ,n , xs2 ,n , xs3 ,n , . . . also converges. Thus the ith components of the
infinite sequence xm1 , xm2 , xm3 , . . . converge for i = 1, 2, . . . , n. It then follows from Lemma 6.3 that lim xsk = p, where p = (p1 , p2 , . . . , pn ). The
j→+∞
result follows.
6.9
The Extreme Value Theorem for Functions of Several Real Variables
Theorem 6.21 (The Extreme Value Theorem for Continuous Functions on
Closed Bounded Sets) Let X be a closed bounded set in m-dimensional Euclidean space, and let f : X → R be a continuous real-valued function defined
on X. Then there exist points u and v of X such that f (u) ≤ f (x) ≤ f (v)
for all x ∈ X.
Proof We prove the result for an arbitrary continuous real-valued function
f : X → R by showing that the result holds for a related continuous function
87
g: X → R that is known to be bounded above and below on X. Let h: R → R
be the continuous function defined such that
h(t) =
t
1 + |t|
for all t ∈ R. Then the continuous function h: R → R is increasing. Moreover
−1 ≤ h(t) ≤ 1 for all t ∈ R (see the proof of Theorem 3.15).
Let f : X → R be a continuous real-valued function on the closed bounded
set X, and let g: X → R be the continuous real-valued function defined on
X such that
f (x)
g(x) = h(f (x)) =
1 + |f (x)|
for all x ∈ X. Then −1 ≤ g(x) ≤ 1 for all x ∈ X. The set of values of the
function g is then non-empty and bounded above, and therefore has a least
upper bound. Let
M = sup{g(x) : x ∈ X}.
Then, for each positive integer j, the real number M − j −1 is not an upper
bound for the set of values of the function g, and therefore there exists
some point xj in the set X for which M − j −1 < g(xj ) ≤ M . The sequence
x1 , x2 , x3 , . . . is then a bounded sequence of points in Rm , because the set X is
bounded. It follows from the multidimensional Bolzano-Weierstrass Theorem
(Theorem 6.20) that this sequence has a subsequence xk1 , xk2 , xk3 , . . . which
converges to some point v of Rn . Moreover this point v belongs to the set X
because X is closed (see Lemma 6.18). Now
M−
1
< g(xkj ) ≤ M
kj
for all positive integers j, and therefore g(xkj ) → M as j → +∞. It then
follows from Lemma 6.6 that
g(v) = g lim xkj = lim g(xkj ) = M.
j→+∞
j→+∞
But g(x) ≤ M for all x ∈ X. It follows that h(f (x)) = g(x) ≤ g(v) =
h(f (v)) for all x ∈ X. Moreover h: R → R is an increasing function. It
follows therefore that f (x) ≤ f (v) for all x ∈ X.
On applying this result with the continuous function f replaced by the
function −f , we conclude also that there exists some point u of X such that
f (u) ≤ f (x) for all x ∈ X. The result follows.
88
6.10
Uniform Continuity for Functions of Several Real
Variables
Definition Let X be a subset of Rm . A function f : X → Rn from X to
Rn is said to be uniformly continuous if, given any ε > 0, there exists some
δ > 0 (which does not depend on either x0 or x) such that |f (x0 ) − f (x)| < ε
for all points x0 and x of X satisfying |x0 − x| < δ.
Theorem 6.22 Let X be a subset of Rm that is both closed and bounded.
Then any continuous function f : X → Rn is uniformly continuous.
Proof Let ε > 0 be given. Suppose that there did not exist any δ > 0 such
that |f (x0 ) − f (x)| < ε for all points x0 , x ∈ X satisfying |x0 − x| < δ. Then,
for each positive integer j, there would exist points uj and vj in X such
that |uj − vj | < 1/j and |f (uj ) − f (vj )| ≥ ε. But the sequence u1 , u2 , u3 , . . .
would be bounded, since X is bounded, and thus would possess a subsequence
uj1 , uj2 , uj3 , . . . converging to some point p (Theorem 6.20). Moreover p ∈ X,
since X is closed. The sequence vj1 , vj2 , vj3 , . . . would also converge to p,
since lim |vjk − ujk | = 0. But then the sequences f (uj1 ), f (uj2 ), f (uj3 ), . . .
k→+∞
and f (vj1 ), f (vj2 ), f (vj3 ), . . . would converge to f (p), since f is continuous
(Lemma 6.6), and thus lim |f (ujk ) − f (vjk )| = 0. But this is impossible,
k→+∞
since uj and vj have been chosen so that |f (uj ) − f (vj )| ≥ ε for all j. We
conclude therefore that there must exist some δ > 0 such that |f (x0 )−f (x)| <
ε for all points x0 , x ∈ X satisfying |x0 − x| < δ, as required.
89