BU7527 - Mathematics of Contingent Claims Mike Peardon Michaelmas Term, 2015
advertisement

BU7527 - Mathematics of Contingent Claims
Mike Peardon
School of Mathematics
Trinity College Dublin
Michaelmas Term, 2015
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
1 / 24
Introduction
to
Monte Carlo
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
2 / 24
Basic Monte Carlo Estimation
If we generate a large ensemble of N uniform variate random
numbers
eX = {X1 , X2 , X3 , . . . XN }
and then evaluate a function f at each point to give the ensemble
eF = {F1 = f (X1 ), F2 = f (X2 ), F3 = f (X3 ), . . . FN = f (XN )}
then it is easy to show that
E[F̄(N) ] = E[F] =
Z 1
dx f (x)
0
This is Monte Carlo! We have a means of reliably computing (to
arbitrary accuracy) any well-defined integral in a finite range.
Infinite ranges can often be computed by changes of variable.
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
3 / 24
Basic Monte Carlo Estimation (2)
The variance of our estimator
(Z is
Z 1
2 )
1
1
ν
[
F
]
=
dx f (x)2 −
dx f (x)
ν[F̄(N) ] =
N
N
0
0
For large N, the sample mean is normally distributed. Can make
(reliable) probabilistic statements about range of true mean.
For estimator to be useful, we must estimate this uncertainty. Can
be done by Monte Carlo too!
So we also need to compute the ensemble
0
eF0 = {F10 = f 2 (X1 ), F20 = f 2 (X2 ), . . . FN
= f 2 (XN )}
And then the uncertainty in our determination is
r
E [ F0 ] − E [ F ] 2
σF =
N
Central limit theorem: probability I lies in the range
[E[F̄] − σF , E[F̄] + σF ] is 68%
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
4 / 24
Basic Monte Carlo Estimation (3)
Simple example Monte Carlo calculation
I=
Z 1
dx
0
The exact answer is 4/3
N
100
1,000
10,000
100,000
1,000,000
10,000,000
100,000,000
1,000,000,000
1−x
√
x
E[F̄(N) ]
1.476353
1.279416
1.300104
1.362455
1.336083
1.334738
1.333639
1.333364
σF
0.200139
0.063977
0.022205
0.018537
0.003774
0.001661
0.000415
0.000146
Error falls by a factor ≈ 10 each time N is increased by 100
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
5 / 24
Basic Monte Carlo Estimation (4)
Simple example Monte Carlo calculation (2)
I=
Z 1
0
dx
1−x
4
√ =
3
x
Repeat 10 times with N = 1, 000, 000 and different RNG seeds:
Seed
E[F̄(N) ]
σF
I ∈ [E[F̄] − σF , E[F̄] + σF ]?
1234
2468
3702
4936
6170
7404
8638
9872
11106
12340
1.336083
1.333846
1.331265
1.334344
1.335615
1.339609
1.329398
1.331647
1.329143
1.336792
0.003774
0.003235
0.003223
0.003652
0.004920
0.004288
0.003275
0.003469
0.003333
0.003724
Y
Y
Y
Y
Y
N
N
Y
N
Y
True answer is in the quoted range in 7 of the 10 trials.
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
6 / 24
Variance reduction
Two different estimators can have different variances (eg N = 100
and N = 1, 000, 000 in the example above).
Lower variance means a smaller range for the true answer to lie in.
Different Monte Carlo estimators can be built: variance reduction
Many different methods:
Antithetic variables
Stratified sampling
Control variates
Importance Sampling
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
7 / 24
Antithetic variables
Recall that if X ∈ [0, 1] is uniform variate, then so is X̃ = 1 − X
Two independent estimators; F = f (X), F̃ = f (X̃). These are
antithetic stochastic variables.
ν[X + Y] = ν[X] + ν[Y] + 2ν(X, Y), where ν is the covariance of X
and Y
ν(X, Y) = E[XY] − E[X]E[Y]
If ν(X, Y) < 0, then the variance of the sum is reduced
These estimators are not now independently distributed, To analyse
the uncertainty, “fuse” them: F(a) = 21 (F + F̃) and generate the
ensemble F(a)
(a) (a)
(a)
Treat eFa = {F1 , F1 , . . . FN , } as iid.
In many examples, using F(a) leads to lower variance.
If the function is odd-symmetric about the mid-point of the integral;
f (x) = −f (1 − x), variance is zero (so is I!).
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
8 / 24
Antithetic variables (2)
Example: evaluate I =
R1
0
dx e0.1x sin 2πx
The integrand is positive for x ∈ [0, 12 ], negative otherwise.
Antithetic variables should work well, since f (x) and f (1 − x) have
opposite signs.
The correct answer is −0.1673423263 . . .
Using N = 1, 000, 000, a simple Monte Carlo estimator and the antithetic
estimator give
6
Ī (10 )
σI
Simple
-0.016046 0.000743
Antithetic -0.016716 0.000015
Both agree (within uncertainty) with true result.
Error is fifty times smaller for antithetic case.
This corresponds to a saving of 2,500 in cost.
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
9 / 24
Stratified Sampling
If I =
R1
0
dx f (x) then I =
R
1
2
0
dx f (x) +
R1
1
2
dx f (x)
What happens if we use N/2 samples to estimate the first half of
the integral, N/2 samples to estimate the second half and add the
two results?
Call the two sub-estimators ĪA and ĪB , so
ĪA =
1 N/2
f (Xi )
N/2 i∑
=1
1
Xi ∈ [0, ]
2
with the corresponding expression for ĪB . The definition implies
E[ĪA ] = 2
1
2
Z
dx
0
The factor of two comes from the normalisation of the probability
density for a u.v. random number ∈ [0, 1/2]
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
10 / 24
Stratified Sampling (2)
Averaging these two sub-estimators gives an estimator for I;
Ī2 =
1
(ĪA + ĪB )
2
ie. E[I ] = I.
The variance is given by
1
(ν[ĪA ] + ν[ĪB ])
4
(Z
Z 1/2
2
Z 1
2 )
1
1
ν[Ī2 ] =
dx f 2 (x) − 2
dx f (x) − 2
dx f (x)
N
0
0
1/2
ν[Ī2 ] =
Now using the trick (x + y)2 + (x − y)2 = 2(x2 + y2 ) gives
1
ν[Ī2 ] = ν[Ī ] −
N
Mike Peardon (TCD)
1/2
Z
dx f (x) −
0
Z 1
2
dx f (x)
1/2
BU7527
Michaelmas Term, 2015
11 / 24
Stratified Sampling (3)
The variance is less than or equal to that of the simple MC estimator
The biggest improvements occur when different regions contribute
opposing signs to the integral.
Example: evaluate I =
R1
0
dx e0.1x sin 2πx
The correct answer is −0.1673423263 . . .
Using N = 1, 000, 000 function evaluations: estimator give
6
Ī (10 )
σI
Simple
-0.016046 0.000743
Antithetic -0.016716 0.000015
Stratified -0.016360 0.000324
Stratified sampler improves slightly over simple MC.
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
12 / 24
Control variates
In cases where the integrand is “close” to a function f̃ that can be
integrated easily, a control variate is often useful.
Re-write the integral (trivially) as
I=
Z 1
dx f (x) − f̃ (x) +
0
Z 1
dx f̃ (x)
0
and now use Monte Carlo to estimate the first part only, while the
second part is known by some other method.
Clearly if f = f̃ , the resulting estimator has variance zero; this
suggests matching f̃ as closely as possible to f .
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
13 / 24
Control variates (2)
Example: evaluate I =
R1
0
dx e0.1x sin 2πx
The correct answer is −0.1673423263 . . .
R1
The integral 0 dx sin 2πx is zero by symmetry, so we can use
sin 2πx
R 1 as the control variate. This tells us
I = 0 dx (e0.1x − 1) sin 2πx
Using N = 1, 000, 000 function evaluations: all four estimators give
6
Ī (10 )
σI
Simple
-0.016046 0.000743
Antithetic -0.016716 0.000015
Stratified -0.016360 0.000324
Control
-0.016706 0.000038
Using a control variate reduces the error by about 20 over the
simple estimator.
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
14 / 24
Control variates (3)
If X is our original Monte Carlo estimator, and Y is a correlated
stochastic variable with a known expected value E[Y], then a new
estimator X̃ can be constructed using the control variate method:
X̃ = X − α(Y − E[Y])
E[X̃] = E[X] for any α. The variance becomes
ν[X̃] = ν[X] − 2αν[X, Y] + α2 ν[Y]
where ν[X, Y] is the covariance of X and Y
This expression is minimised when α takes the value
α∗ =
ν[X, Y]
ν [Y ]
For this value of α,
ν[X̃] = ν[X] −
ν[X, Y]2
ν [Y ]
To optimise, need ν[X, Y] and ν[Y]. Estimate using Monte Carlo!
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
15 / 24
Importance Sampling
If a random variable X is drawn from distribution pX , and a function
f evaluated; F = f (X), then the expected value of F is
E[F] =
Z
f (x)pX (x)dx
This suggests another means of performing integration;
I=
Z
g(x)dx =
Z
g(x)
pX (x)dx
pX ( x )
Evaluating g/pX and averaging gives an alternative estimator for I
The variance of the estimator is dependent on pX .
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
16 / 24
Example - importance sampling
Example: evaluate I (y) =
Ry
0
dx e−x sin πx
Compare importance sampling to flat sampling
Use probability density pX (x) =
sampling so:
I (y) = (1 − e
−y
)
e−x
,x
1 − e−y
Z y
0
∈ [0, y] for importance
dx pX (x) sin πx
Flat sampling would use uniform variate random numbers,
u ∈ [0, y], which have density pU (u) = y1
I (y) = y
Z y
0
dx pU (x)e−x sin πx
Importance sampling; draw from pX and evaluate F = sin πX.
Average of F has expectation value I (y)
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
17 / 24
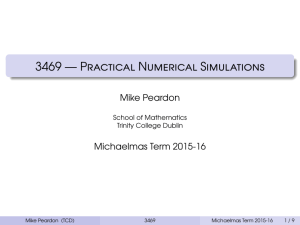
Example - importance sampling(2)
0.4
I(x)
0.3
0.2
0.1
Uniform sampling
Importance sampling
Exact
0
Mike Peardon (TCD)
0.1
1
10
x
BU7527
100
1000
Michaelmas Term, 2015
18 / 24
Optimising importance sampling
R
For the estimation of a given integral, I = f (x)dx, what is the
optimal importance sampling distribution?
The optimal choice would minimise the variance in Ĩ, the estimator
for I. Re-writing I as
Z
f (x)
p(x)dx
I=
p(x)
and the variance in the estimator is
Z Z 2
f (x) 2
f (x)
2
ν[Ĩ ] =
p(x)dx − I =
dx − I2
p(x)
p(x)
The minimum of this functional is found using variational calculus;
find p that minimises ν subject to the functional constraint
Z
Mike Peardon (TCD)
p(x)dx = 1
BU7527
Michaelmas Term, 2015
19 / 24
Optimising importance sampling (2)
The minimising functional is
κ [p] = ν − λ
Z
p(x)dx − 1
with λ an unknown lagrange multiplier
Evaluate functional derivative using
δ
δa(x)
Z
b(y)dy =
Z
δb
δb
(y)δ(x − y)dy = (x)
δa
δa
δκ
f 2 (x)
=− 2
−λ = 0
δp(x)
p (x)
Which gives the optimal sampling density
p2 (x) =
Mike Peardon (TCD)
BU7527
f 2 (x)
λ
Michaelmas Term, 2015
20 / 24
Optimising importance sampling (3)
If λ > 0, can write
|f (x)|
λ̃
Now satisfying the normalisation constraint gives λ̃; and the optimal
sampling density is
p(x) =
p(x) = R
|f (x)|
|f (y)|dy
Usually, it is impossible to draw from this sampling density. Finding
an algorithm to do this is about as hard as computing I.
A simple rule: sample where |f | is large most frequently.
Mostly used when solving problems of the form
R
f (x)q(x) dx
hf i = VR
q(x) dx
V
where q(x) ≥ 0, ∀ x ∈ V
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
21 / 24
Markov Chain
Monte Carlo algorithms
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
22 / 24
The Metropolis-Hastings algorithm
An algorithm to construct a Markov chain for importance sampling
Monte Carlo, given a desired fixed-point probability, π (χ)
Useful property: normalisation of π need not be known.
Algorithm has two key steps: a proposal and an accept/reject test.
Metropolis-Hastings algorithm
1
Store current state of the system, ψ = ψk
2
Reversibly generate a proposed new state, ψ0 from ψk
3
Compute r = min[1,
4
Set
π (ψ0 )
]
π (ψ)
ψk+1 =
Mike Peardon (TCD)
ψ0
ψ
with probability r
with probability 1 − r
BU7527
Michaelmas Term, 2015
23 / 24
The Metropolis-Hastings algorithm (2)
Provided the proposal step is constructed appropriately, the chain is
irreducible, so the ergodic theorem gives a means of computing
integrals by importance sampling Monte Carlo.
The algorithm obeys detailed balance for π.
Detailed balance:
Transition probability for both steps is
0
P (χ0 ← χ) = Pp (χ‘ ← χ) min[1, ππ((χχ)) ]
0
So
P (χ0 ←χ)
P (χ←χ0 )
=
Pp (χ‘←χ) min[1, ππ((χχ)) ]
Pp (χ←χ0 ) min[1, ππ((χχ0)) ]
step is reversible,
If π (χ0 ) ≥ π (χ) then
P (χ0 ←χ)
P (χ←χ0 )
P (χ0 ←χ)
P (χ←χ0 )
=
0
=
π (χ0 )
min[1, π (χ) ]
π (χ)
min[1, π (χ0 ) ]
1
π (χ)
π (χ0 )
=
when the proposal
π (χ0 )
π (χ)
= ππ((χχ))
so in both cases, P (χ0 ← χ)π (χ) = P (χ ← χ0 )π (χ0 )
otherwise
Mike Peardon (TCD)
BU7527
Michaelmas Term, 2015
24 / 24