Combining geometry and combinatorics A unified approach to sparse signal recovery
advertisement

Combining geometry
and combinatorics
A unified approach to sparse signal recovery
Anna C. Gilbert
University of Michigan
joint work with R. Berinde (MIT), P. Indyk (MIT),
H. Karloff (AT&T), M. Strauss (Univ. of Michigan)
Sparse signal recovery
measurements:
length m = k log(n)
k-sparse signal
length n
Problem statement
Assume x has
low complexity:
x is k-sparse
(with noise)
m as small
as possible
Construct matrix A : Rn → Rm
Given Ax for any signal x ∈ Rn , we can quickly recover b
x with
kx − b
x kp ≤ C
min
y k−sparse
kx − y kq
Parameters
Number of measurements m
Recovery time
Approximation guarantee (norms, mixed)
One matrix vs. distribution over matrices
Explicit construction
Universal matrix (for any basis, after measuring)
Tolerance to measurement noise
Applications
Applications
Data stream algorithms
xi = number of items with index i
Data stream algorithms
can maintain Ax under increments to x and recover
xi = number of
items with index
approximation
to ix
can maintain Ax under increments to x
Efficient data sensing
recover approximation to x
digital cameras
Efficient data sensing
digital/analog analog-to-digital
cameras
converters
analog-to-digital converters
Error-correcting codes
Error-correcting codes
{y ∈ Rn | Ay = 0}
code
code {y ∈ Rn |Ay
= 0}
x = error vector,
= syndrome
x =Ax
error
vector, Ax = syndrome
Two approaches
Geometric
[Donoho ’04],[Candes-Tao ’04, ’06],[Candes-Romberg-Tao ’05],
[Rudelson-Vershynin ’06], [Cohen-Dahmen-DeVore ’06], and many others...
Dense recovery matrices (e.g., Gaussian, Fourier)
Geometric recovery methods (`1 minimization, LP)
b
x = argminkzk1 s.t. Φz = Φx
Uniform guarantee: one matrix A that works for all x
Combinatorial
[Gilbert-Guha-Indyk-Kotidis-Muthukrishnan-Strauss ’02],
[Charikar-Chen-FarachColton ’02] [Cormode-Muthukrishnan ’04],
[Gilbert-Strauss-Tropp-Vershynin ’06, ’07]
Sparse random matrices (typically)
Combinatorial recovery methods or weak, greedy algorithms
Per-instance guarantees, later uniform guarantees
[CCFC02, CM06]
4
k logc n
n logc n
logc n
BERINDE, GILBERT, INDYK, KARLOFF, STRAUSS
k log n
n log n
log n
E
E
Paper
[CM04]
A/E
[CRT06]
A
[CM04]
A
[CRT06]
[GSTV06]
[GSTV07]
n logc n
c
n log
n log
nn
k
E log(n/k)
k logc n
E k logc n k log n
nk log(n/k)
n logc n
n log
n log
nn
[GSTV06]
A
[GSTV07]
A
A
A
A
A
A
[GLR08]
A
(k “large”)
c
n log n
k logc n2
n logc n
logc n
k2 logc n
nk log(n/k)
k log(n/k)
k log(n/k)
LP
LP
k logc n
n log n
logc nc
n log
n
n log n
c logn
log log n
ck(log
log log
n)log
k logc n
c
n log
c n
1−a
kn1−a
kn
n log(n/k)
n log(n/k)
log n
k log(n/k)
k log(n/k)
c
k log n
k log c n
!2 ≤ C!2
!2 ≤ C!2
Approx. error
k logc nn log n !2 ≤ C!2
n log n
!2 ≤ C!2
LP
LP
nk log(n/k)
k logc nk logc n
c
klog
log(n/k)
n
n cn
kloglog
Decode time
k log(n/k)
logc nc n
k log
n log n
k logc n
A
A
nk log(n/k)
k logc n
k log(n/k)
Column sparsity/
c
Update
logtime
n
c
loglog
nn
log n
c
n log
nn
n log
k log n
k(logA n)
This paper
This paper
k log n
k log(n/k)
[NV07]
[GLR08]
(k “large”)
E
E
A
k log(n/k)
c
A k log nk logc n
A
[NV07]
Encode time
k logc n
c
k log n k log n
E
[CCFC02,ECM06]
Sketch length
k logc n
n log n
!1 ≤ C!1 !2
!1 ≤ C!1 !
2
!2 ≤
k logc n!2 ≤
k
C
!1
k1/2
C
!11
k1/2
≤
≤
C
!1
k1/2
C
!1
1/2
k
C
!1
k1/2
≤
YC
k1/2
1−a
1−a
nn
log(n/k)
c
LP
LP
!2 ≤
LP
log(n/k)
LP
C
k1/2
!1!2
!1 ≤ C!1
≤
C
k1/2
Paper
[DM08]
[NT08]
Sketch
length 1.
Encode
time Update
time
Decoderesults.
time
Approx. error
Figure
Summary
of the
best prior
C
!1
k log(n/k)
nk log(n/k)
k log(n/k)
nk log(n/k) log D
!2 ≤ k1/2
A/E[NT08]
Sketch
Encodenktime
time
A length
k log(n/k)
log(n/k)Update
k log(n/k)
A
k log(n/k)
nk log(n/k)
k log(n/k)
A
k logc n
n log n
k logc n
A
A
[IR08]
A
k log(n/k)
n log(n/k)
k log(n/k)
k logc n
nk log(n/k)
n log n
k log(n/k)
n log(n/k)
log(n/k)
k log(n/k)
k logc n
Decode
nk log(n/k)
logtime
D
!2 ≤
nk
log(n/k)
n log
n log D log D
!2 ≤
n log(n/k)
Y
!1 ≤ C!1
A
log(n/k)
n log(n/k)
Noise
Y
Approx. Yerror
C
! ≤ k1/2
Y !1
C
!1
k1/2
C
!1
k1/22
! ≤ C!1
nk log(n/k) log D1
n log n log D
Figure 2. Recent work.
[IR08]
Y
!1
Prior work: summary
A/E
A
Y
k
Figure 1. Summary of the best prior results.
Paper
[DM08]
Y
!1
n)1/2
!1
nk log n
!n)21/2≤ C(log
k1/2
!1C(log
nk2 log c n2 !2c ≤ C(log
Yn)1/2
k1/2
!1
nk
log
n
≤
C(log !
n)
21/2
2
c
1/2
kY
!1
nk log n
!2 ≤
1/2
2
Y
Y
Y
! ≤ C log
Y n!1
1 ≤ C log n!1
logc!n
!2
!2 ≤
Noise
!1 ≤ C!1
!1 ≤ C!1
!2 ≤
!2 ≤
CY
!1
k1/2
C
!1
k1/2
!1 ≤ C!1
Theorem 1. Consider any m × n matrix Φ that is the adjacency matrix of an (k, !)-unbalanced
expander G = (A, B, E), |A| = n, |B| = m, with left degree d, such that 1/!, d are smaller than n.
Then the scaled matrix Φ/d1/p satisfies the RIPp,k,δ property, for 1 ≤ p ≤ 1 + 1/ log n and δ = C!
Figure 2. Recent work.
for some absolute constant C > 1.
Noise
Y
Y
Y
Y
Recent results: breaking news
The fact that the unbalanced expanders yield matrices with RIP-p property is not an accident.
5
Theorem 1.In Consider
any
min×Section
n matrix
that
is the
adjacency
of an
!)-unbalanced
particular, we
show
2 thatΦany
binary
matrix
Φ in whichmatrix
each column
has(k,
d ones
Y
Unify these techniques
Achieve “best of both worlds”
LP decoding using sparse matrices
combinatorial decoding (with augmented matrices)
Deterministic (explicit) constructions
What do combinatorial and geometric approaches share?
What makes them work?
Sparse matrices: Expander graphs
N(S)
S
Adjacency matrix A of a d regular (1, ) expander graph
Graph G = (X , Y , E ), |X | = n, |Y | = m
For any S ⊂ X , |S| ≤ k, the neighbor set
|N(S)| ≥ (1 − )d|S|
Probabilistic construction:
d = O(log(n/k)/), m = O(k log(n/k)/2 )
Deterministic construction:
d = O(2O(log
3
(log(n)/))
), m = k/ 2O(log
3
(log(n)/))
Measurement matrix
Adjacency matrix
Bipartite graph
(larger example)
1
0
1
1
0
1
1
0
0
1
0
1
1
1
0
1
0
1
1
0
0
1
1
1
1
0
0
1
1
0
0
1
1
1
1
0
1
0
1
0
5
10
15
20
50
100
150
200
250
RIP(p)
A measurement matrix A satisfies RIP(p, k, δ) property if for any
k-sparse vector x,
(1 − δ)kxkp ≤ kAxkp ≤ (1 + δ)kxkp .
RIP(p) ⇐⇒ expander
Theorem
(k, ) expansion implies
(1 − 2)dkxk1 ≤ kAxk1 ≤ dkxk1
for any k-sparse x. Get RIP(p) for 1 ≤ p ≤ 1 + 1/ log n.
Theorem
RIP(1) + binary sparse matrix implies (k, ) expander for
=
1 − 1/(1 + δ)
√
.
2− 2
Expansion =⇒ LP decoding
Theorem
Φ adjacency matrix of (2k, ) expander. Consider two vectors x, x∗
such that Φx = Φx∗ and kx∗ k1 ≤ kxk1 . Then
kx − x∗ k1 ≤
2
kx − xk k1
1 − 2α()
where xk is the optimal k-term representation for x and
α() = (2)/(1 − 2).
Guarantees that Linear Program recovers good sparse
approximation
Robust to noisy measurements too
Locating a Heavy
Hitter
Combinatorial
decoding:
bit-test
Augmented!expander
=⇒
Combinatorial
decoding
Suppose the signal contains
one “spike”
and no noise
! log2 d bit tests will identify its location, e.g.,
0
0
1
0 0 0 0 1 1 1 1
0
0
B1s = 0 0 1 1 0 0 1 1
0 = 1
0 1 0 1 0 1 0 1
0
0
0
0
MSB
LSB
bit-test matrix · signal = location in binary
One Sketch for All (MMDS 2006)
18
Theorem
Ψ is (k, 1/8)-expander. Φ = Ψ ⊗r B1 with m log n rows. Then, for
any k-sparse x, given Φx, we can recover x in time O(m log2 n).
With additional hash matrix and polylog(n) more rows in
structured matrices, can approximately recover all x in time
O(k 2 logO(1) n) with same error guarantees as LP decoding.
Expander central element in
[Indyk ’08], [Gilbert-Strauss-Tropp-Vershynin ’06, ’07]
RIP(1) 6= RIP(2)
Any binary sparse matrix which satisfies RIP(2) must have
Ω(k 2 ) rows [Chandar ’07]
Gaussian random matrix m = O(k log(n/k)) (scaled) satisfies
RIP(2) but not RIP(1)
xT = 0 · · · 0 1 0 · · · 0
y T = 1/k · · ·
kxk1 = ky k1
but
1/k 0 · · · 0
√
kGxk1 ≈ kkGy k1
Expansion =⇒ RIP(1)
Theorem
(k, ) expansion implies
(1 − 2)dkxk1 ≤ kAxk1 ≤ dkxk1
for any k-sparse x.
Proof.
Take any k-sparse x. Let S be the support of x.
Upper bound: kAxk1 ≤ dkxk1 for any x
Lower bound:
most right neighbors unique
if all neighbors unique, would have
kAxk1 = dkxk1
can make argument robust
Generalization to RIP(p) similar but upper bound not trivial.
RIP(1) =⇒ LP decoding
`1 uncertainty principle
Lemma
Let y satisfy Ay = 0. Let S the set of k largest coordinates of y .
Then
kyS k1 ≤ α()ky k1 .
LP guarantee
Theorem
Consider any two vectors u, v such that for y = u − v we have
Ay = 0, kv k1 ≤ kuk1 . S set of k largest entries of u. Then
ky k1 ≤
2
kuS c k1 .
1 − 2α()
`1 uncertainty principle
Proof.
(Sketch): Let S0 = S, S1 , . . . be coordinate sets of size k in
decreasing order of magnitudes
0
y
A = A restricted to N(S).
S
Ay
On the one hand
0
kA yS k1 = kAyS k1 ≥ (1 − 2)dky k1 .
S1
On the other
0
0
0 = kA y k1 = kA yS k1 −
X
X
S2
|yi |
l≥1 (i,j)∈E [Sl :N(S)]
≥ (1 − 2)dkyS k1 −
X
|E [Sl : N(S)]|1/kkyS
l−1 k1
l
≥ (1 − 2)dkyS k1 − 2dk
X
l≥1
≥ (1 − 2)dkyS k1 − 2dky k1
1/kkyS
k
l−1 1
N(S)
Combinatorial decoding
Bit-test
Good votes
Bad votes
Retain {index, val} if have > d/2 votes for index
d/2 + d/2 + d/2 = 3d/2 violates expander =⇒ each set of
d/2 incorrect votes gives at most 2 incorrect indices
Decrease incorrect indices by factor 2 each iteration
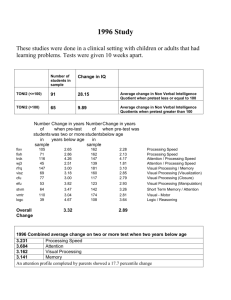
Empirical results
1
Probability of exact recovery, signed signals
1
0.9
0.9
0.8
ρ
ρ
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.2
0.4
δ
0.6
0.8
1
0.1
0.9
0.8
0.7
0.6
0.6
0.5
1
0.7
0.7
0.6
Probability of exact recovery, positive signals
0.8
0.8
0.7
0
0
1
0.9
0.6
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0
0
0.2
0.4
δ
0.6
0.8
1
Performance comparable to dense LP decoding
Image reconstruction (TV/LP wavelets), running times, error
bounds available in [Berinde, Indyk ’08]
0.1
Summary: Structural Results
Geometric
RIP(2)
Linear
Programming
Combinatorial
⇐⇒
RIP(1)
Weak
Greedy
More specifically,
Expander
sparse
binary
Explicit constructions
m = k2(log log n)
RIP(1) matrix
LP decoding
O(1)
+ 2nd hasher
(for noise only)
bit tester
Combinatorial
decoding
(fast update time, sparse)
(fast update time, fast recovery time, sparse)