Contests with Many Heterogeneous Agents ∗ S´ergio O. Parreiras Anna Rubinchik
advertisement

Contests with Many Heterogeneous Agents∗
Sérgio O. Parreiras†
Anna Rubinchik‡
May 2006
Abstract
We study tournaments with many ex-ante asymmetric contestants.
The asymmetry is either with respect to the agents’ distribution of
valuations for the prize or with respect their risk-aversion (CARA)
parameter. We characterize equilibria in monotone strategies and
show that tournaments with many asymmetric agents are qualitatively distinct. First, in tournaments with two asymmetric (or many
symmetric) participants, an agent always exerts some effort with positive probability. In contrast, with many asymmetric participants,
an agent might not exert any effort at all, even if there is a positive
probability that he has the highest valuation among all contestants.
Secondly, in tournaments with two asymmetric (or many symmetric)
agents, equilibrium effort densities are always decreasing. This prediction is at odds with experimental evidence that shows the empirical
density might be increasing at high effort levels. With many asymmetric agents, however, the increasing bid density is consistent with
an equilibrium behavior.
JEL Classification: D44, C72, D82
Key words:all-pay auctions, tournaments, asymmetric bidders
∗
We would like to thank participants of the International Conference of Game Theory; the World Game Theory Congress, seminar participants at Duke University, UNC
at Chapel Hill, EPGE-FGV-RJ, Queen’s University, University of CO at Boulder. Gary
Biglaiser, Jim Friedman, Jennifer Lamping, Vijay Krishna, Eric Maskin, Humberto Moreira, Claudio Mezzetti provided useful remarks. We are also grateful to Bernard Lebrun
for sending us his working paper.
†
Department of Economics, UNC at Chapel Hill, sergiop@unc.edu
‡
Department of Economics, CU at Boulder, Anna.Rubinchik@colorado.edu
1
1
Introduction
It is hard to imagine an area of human activity that does not involve
contests. Students striving to be the best in their class, employees awaiting
promotion, sportsmen fighting for a gold medal, researchers competing for
grants, R&D firms racing to capture monopoly profits — all can be viewed as
players in games with a single winner. Typically, the rest of the participants
are losers, who have to absorb the cost of the invested effort. This is the
scenario we consider in this paper.
Casual observation suggests that often participants of such contests can
be roughly divided into two main categories: those who invest a minimal
effort, being reasonably sceptical about the possibility of winning, and the
others who fight with all their might to win the prize — drop-outs and
workaholics, as Muller and Schotter (2003) call them. This phenomenon has
some empirical support. In experiments with six subjects, whose valuations
for the prize are uniformly distributed, (Muller and Schotter 2003, Noussair
and Silver 2005) demonstrate that empirical distribution of effort is bimodal,
with one mode located near the lowest observed level and another one near
the highest effort level compatible with rational play.1 Following Muller and
Schotter (2003), we call the former the drop-out and the latter – the race-tothe-bottom effect.
These findings might seem puzzling in the view of the existing all-pay auction literature. In a setting with two contestants, as in Amann and Leininger
(1996), equilibrium effort density is always decreasing. The same is true for
symmetric models with many contestants, as in Gavious, Moldovanu, and
Sela (2002). We show that with more than two participants who either (1)
have different (CARA) risk-aversion parameters and the same distribution
of valuations for the prize, or (2) are risk neutral and have their valuations
distributed differently, the race-to-the-bottom effect (i.e., the local mode at
high effort levels) can be explained. Thus, introducing asymmetry might
qualitatively change the density of equilibrium effort levels. In particular, a
1
Besides a linear specification for the cost of effort/bidding, Muller and Schotter (2003)
also consider non-linear costs of effort/bidding, getting similar qualitative results. From
the theoretical point of view, the assumption of linear costs entails no loss of generality
N
because, bids can always be re-scaled in order to satisfy this assumption. If (bi )i=1 is
N
an equilibrium strategy profile for the model with non-linear costs then (c ◦ bi )i=1 is an
equilibrium for the model with linear costs, as long as, the cost function c is continuous
and strictly increasing.
2
“weak” contestant facing “stronger” rivals might very often either put in a
negligible effort, or — at the other extreme — work very hard. Stronger yet,
in our set-up equilibrium effort density might be increasing at the top. In
addition, case (2) is consistent with a complete drop-out behavior. An agent
who is perceived to have a lower (in the first-order stochastic dominance
sense) distribution of valuations may choose to always exert zero effort in
equilibrium regardless of his valuation. This is true even though there is a
positive probability that his valuation is the highest, hence the equilibrium
allocation is not always efficient in this case. Both of these qualitative features are in contrast with the two-agent or symmetric-agent models, which
generate a monotonically decreasing effort density and where every agent
exerts some effort with positive probability.
One might expect risk aversion to explain the drop-out and race-to-thebottom effects. In a symmetric model, Fibich, Gavious, and Sela (2004)
show that, indeed, a small increase in risk-aversion makes low-valuation contestants exert less effort and high-valuation contestants exert more effort in
comparison with the risk-neutral benchmark. A small perturbation of the
risk-neutral model, however, does not change the qualitative features of the
equilibrium effort (bid) distribution: in particular, the distribution of effort
remains always decreasing for small degrees of risk-aversion. Moreover, we
show that no matter how risk averse the contestants are, their equilibrium
effort density is decreasing, if all of them have identical attitudes towards risk
with preferences represented by the constant absolute risk aversion function
(CARA).
In sum, risk-aversion per se, at least in the CARA case, is incapable of
explaining the local mode of high effort. Key ingredients to account for raceto-the-bottom effect are heterogeneity of the contestants (differences in risk
attitudes or in distributions of abilities/value for the prize) and there being
more than two contestants.
We show that the equilibrium distribution of effort in an asymmetric,
but only two-player contest is also decreasing. In accord with this finding is
the available experimental evidence by Kirchamp (2005) showing a negligible
race-to-the-bottom effect in two-player contests.
One might view the existing models as accounting for the drop-out effect,
because the equilibrium effort densities are typically infinitely high at zero.
In these models, however, the complete drop-out effect (zero effort for all
valuations) is ruled out. With two agents, if an agent always exerts zero
3
effort, the competitor will try to exert a ‘minimal’ effort level.2 In turn, one’s
best-response to the ‘minimal’ effort is to exert a positive effort. Therefore, an
agent always choosing no-effort when he faces only one rival, is incompatible
with an equilibrium.3 Also, the complete drop-out can never arise in an
equilibrium with many ex-ante symmetric contestants because the symmetric
equilibrium is unique.4
Incorporating the ex-ante asymmetry without loosing tractability is, by
itself, another attractive feature of our model. In a variety of actual contests participants differ in their desire to win, and this can be easily detected by their rivals at the very start. In the examples we have mentioned,
contestants — no doubt — use commonly observable characteristics of the
rivals to infer their valuations for the prize. The characteristics (e.g., background, previous experience, gender, age) differ across individuals, so, naturally, such environments are asymmetric. However, the precise values are
usually hard to induce, and some residual uncertainty often remains. Hence,
conditional on observable characteristics of an individual, her valuation is
still non-deterministic in the eyes of the others. In line with most of the
literature on the subject, we assume that contestants’ beliefs about the value
associated with winning by a particular individual can be reduced to a probability distribution, which is commonly shared by all. In other words, any
two contestants share a common prior about distribution of value for the
prize held by any third contestant.
Related literature. Apart from the contributions mentioned above, we
will briefly mention some of the related others, clearly, not even attempting
to provide an adequate survey of the literature on tournaments and all-pay
auctions. Contests under complete information about individual valuations
with several participants were analyzed by Hillman and Riley (1989) and
Baye, Kovenock, and de Vries (1996): apart from knife-edge cases, the two
individuals with the highest values for the prize enter the competition, while
the rest drop out. Although the full-information models might account for a
complete drop-out effect, it is hard to interpret the results as generating the
race-to-the-bottom effect. Besides, as follows from the examples mentioned
at the outset, it might be desirable — from a positive perspective — to leave
some uncertainty about rivals’ preferences in the model.
2
The best response function is not well defined in this case.
In all statements, ‘equilibrium’ stands for ‘equilibrium in non-decreasing strategies’.
4
By Parreiras and Rubinchik-Pessach (2006), in the symmetric setting, equilibrium
strategies are continuous. Uniqueness follows from Proposition 11, in the Appendix.
3
4
In all the literature known to the authors dealing with contests under
incomplete information, either the contestants are ex-ante identical, or there
are only two participants. The latter case with independent valuations was
studied by Amann and Leininger (1996), who, in particular, demonstrated
that distribution of effort of one of the contestants might have a mass point at
zero, thus, generating the drop-out effect. Lizzeri and Persico (1998) analyzed
a two-person contest with affiliated signals. Contests with ex-ante identical
participants whose valuations are affiliated were examined (in addition to
the contributions mentioned earlier) by Krishna and Morgan (1997). The
incomplete information case with many symmetric participants independent
signals was extended by Gavious, Moldovanu, and Sela (2002) to allow for
non-linear cost of effort, and by Fibich, Gavious, and Sela (2004) to allow
for a small degree of risk-aversion.
With the exception of the models that allow for affiliated signals (Krishna
and Morgan 1997, Lizzeri and Persico 1998) all the previous incomplete information all-pay auctions models are nested within our model. Moreover,
the mixed strategy equilibrium of complete information models (Hillman
and Riley 1989, Baye, Kovenock, and de Vries 1993, Baye, Kovenock, and
de Vries 1996, Che and Gale 1998) can also be described by our Proposition
1 for any strictly positive effort level.
We present the model next, characterize the equilibrium in Section 2.1,
providing sufficient conditions for its uniqueness in Section A.4, and formulate our main results in Section 3. Proofs omitted in the text are collected
in the Appendix.
2
The Model
There are N ≥ 2 individuals competing for a prize. The prize is allocated
to the contestant who demonstrates the top performance or achieves the best
result. We assume that one’s performance fully reflects own effort. Simply
put, effort is observable. The contestants have different values associated
with receiving the prize, that is, the desire to win,5 varies across participants.
The payoff to the winner, say, contestant k, who exerts costly effort b ≥ 0, is
uk (vk − b + w)
5
For the risk-neutral model, i’s valuation for the prize, vi , may also be interpreted the
reciprocal of i’s marginal cost of effort, or simply, as a measure of i’s ability.
5
while the losers get uj (w − b), j 6= k, where w > 0 is the initial wealth
of a contestant, substantial enough, so that a contestant is never resourceconstrained in choosing an effort (bid), the value of which is always bounded
by v i , her highest possible valuation of the prize, w > maxi v i . We assume
the contestants are weakly risk averse with ui : R → R+ , twice differentiable,
strictly increasing and concave.
Before deciding on one’s effort, each contestant becomes aware of the own
desire to win, v. Based on the observed characteristics a rival, i, one forms
a probabilistic prior with respect to the value, vi , that the rival attaches
to winning, the value, which is viewed as a random variable, Vi , by all the
contestants but i. Naturally, then, in the eyes of all contestants, values of the
rivals are distributed independently, but not necessarily identically, Vi ∼ Fi
on [v, v i ].
We assume that each Fi is differentiable and that its derivative, the probability density function, fi , is continuous and is bounded away from zero for
all v ∈ [v, v i ].6
To choose an optimal level of effort, or, simply, a bid, b, any contestant i
has to maximize the payoff that will result from placing that bid,
Πi (b|vi ) = Wi (b; b−i ) ui (vi − b + w) + (1 − Wi (b; b−i ))ui (w − b) ,
(1)
where Wi (·) is the probability of winning, which, in particular, is driven by
the effort levels chosen by the others, that is, their strategies.
A strategy for individual i is a Lebesgue–measurable function that maps
valuations into effort levels, bi : [v, v i ] → R+ . We restrict attention to equilibria in which contestants with higher valuations for the prize expend (weakly)
higher effort, or, simply, bid higher. Existence of a Bayes-Nash equilibrium
in non-decreasing strategies follows from Athey (2001, Theorem 7, p. 881).
Moreover, if a contestant bids above zero, her strategy is strictly increasing in a Bayes-Nash equilibrium in non-decreasing strategies, as follows from
Lemma (2) in the Appendix. This observation enables us to formulate inverse bid functions that associate bid b with the valuation of the contestant
who places that bid. Clearly, in an asymmetric environment these functions
might vary by contestant.
Let the generalized inverse bid function of contestant i be denoted by
6
The last assumption is used for the proof of equilibrium uniqueness, but can be relaxed
for the rest of the analysis. Later we consider examples in which the assumption is dropped.
6
φi (b), R → [v, v i ]
φi (b) ≡ max (v, sup {v : bi (v) ≤ b}) , i = 1, . . . , N.
The generalized inverse bid satisfy the following properties: it agrees
with the inverse bid b−1
whenever the latter is well-defined; it is constant at
i
any point of discontinuity (jump) of the bid function, and it returns v for
any bid b strictly below the lowest equilibrium bid; it is continuous;7 and
it is differentiable almost everywhere since it is a bounded, non-decreasing
function. Finally, given these functions we can determine,
Gi (b) ≡ Prob [bi (Vi ) ≤ b] = Fi (φi (b)),
the probability that contestant i bids at or below b. Then the probability
of winning by contestant i who bids b can be expressed as the product of
cumulative distributions of equilibrium bids,
Y
Wi (b) ≡
Gj (b).
j6=i
2.1
Equilibrium
Fix the bidding behavior of all the contestants, but i. To maximize the
payoff (1) , contestant i with valuation vi should choose b ≤ vi to equate the
marginal benefit and the marginal cost from bidding b (if such value b exists),
M Bi (b) = M Ci (b) ,
M Bi (b) ≡ [ui (vi − b + w) − ui (w − b)] Wi′ (b)
M Ci (b) ≡ u′i (w − b) (1 − Wi (b)) + u′i (vi − b + w)Wi (b)
(2)
where the marginal probability of winning is
XY
Wi′ (b) =
Gk (b)gj (b).
j6=i k6=i,j
Remark 1 Since contestants are weakly risk-averse, M Bi (b) − M Ci (b) is
strictly increasing in vi for b > 0. In other words, Πi (b|vi ) satisfies the strict
single-crossing property.
7
Lemma 3 in the Appendix, section A.2.
7
If the marginal benefit is below marginal cost for any choice of b ∈ (0, vi ],
then contestant i with valuation vi should drop out, that is, choose bi (vi ) = 0.
To characterize an equilibrium, therefore, we need to identify the set of
active participants. For this purpose, given an equilibrium strategy profile,
for any effort level b > 0, we define the set of contestants who choose this
effort level, for some realizations of their valuations,
J (b) = {j ∈ {1, .., N } |∃vj ∈ [v, v j ] : bj (vj ) = b} .
It is important to keep in mind that, in contrast with the symmetric model,
this set might not include all the contestants for some b > 0. In other words, it
might happen in an equilibrium that the contestants choose different bidding
intervals. It not hard to see, however, that for any bid b in the support
of equilibrium bids there should be at least two contestants who, for some
realization of their valuations, choose to bid b, in other words the set J (b)
always contains at least two elements.
By definition, if contestant j’s highest equilibrium bid, bj , is strictly below
b, then Gj (b) = 1.
If satisfied with equality, the system of the first order conditions (2) can
be re-arranged in the following form,
X gj (b)
= Si (b) , i ∈ J (b) , b > 0;
Gj (b)
j6=i
(3)
where gj (b) ≡ fj (φj (b))φ′j (b) is the probability density function of the bids
placed by contestant i and
Si (b) ≡
M Ci (b)
> 0.
Wi (b) (ui (vi − b + w) − ui (w − b))
(4)
Also, in an equilibrium it has to be the case that if contestant i with
valuation vi exerts effort b, then vi = φi (b) .
By inspecting the first order conditions (3) , one can easily notice that
the right hand side, Si (b) , does not involve effort density functions for any
contestant, so the system of equations (3) is linear in gi (b) for any b > 0.
The following proposition provides a solution to the system in terms of bid
densities. These conditions are necessarily satisfied in an equilibrium.
8
Proposition 1 For almost all bids,8 b > 0, the system of first order conditions (3) can be represented as
!
P
Gi (b)
Sj (b) − (K(b) − 2)Si (b) , i ∈ J (b)
(K(b)−1)
gi (b) =
(5)
j∈J(b)\{i}
0,
otherwise
where K(b) = #J (b) is the number of contestants with a type who bids b.
This representation of the necessary conditions simplifies the problem of
finding an equilibrium in an asymmetric environment. Indeed, the derivative
′
gi (b)
of contestant i (when it exists)
of the inverse bid density, φi (b) = fi (φ
i (b))
is expressed in terms of own and rivals’ inverse bid densities, φj (b) , that
determine the corresponding terms Sj (b). Notice the term
X
∆Si (b) ≡
Sj (b) − (K(b) − 2)Si (b)
j∈J(b)\{i}
is negative only if M Ci (b) > M Bi (b), that is, only when it is not optimal
for contestant of type vi to bid b. Moreover, as noticed before, K (b) ≥ 2.
Thus, the density is well defined.
Observe that necessary conditions (5) do not assure that bid functions
bi (vi ) are continuous in an equilibrium. An earlier version of this paper,
Parreiras and Rubinchik-Pessach (2006), uses arguments of Lebrun (1999)
to provide a set of sufficient conditions for the continuity of equilibrium
strategies for the risk-neutral case. Along with the continuity, conditions (5)
coupled with the condition bi (v i ) = bi fully determine a unique solution, see
argument in the Appendix, section A.4. Clearly, in those cases, necessary
conditions (5) fully characterize the equilibrium.
The system (5) can be solved for equilibrium inverse bids. In general,
only numerical solutions can be obtained. Nevertheless, Parreiras (2006)
derives closed-form solutions for the case in which valuations are distributed
uniformly with the contestant-specific support. Moreover, we can use the sign
of the expression ∆Si (b) to construct an indicator of individual participation.
This enables us to derive the results in Section 3.1.2, describing sufficient
conditions for a complete drop-out of some contestants. Finally, and – most
8
More exactly, (5) holds for all b > 0 where the inverse bid functions are differentiable
and the set of active contestants, J(b), is constant in some neighborhood of b.
9
importantly – characterization (5) provides a way to demonstrate our main
results resting on the shape of the effort density, in particular, the sign of its
derivative at the top bid. We identify cases in which that sign is positive, that
is, some of the contestants intensify their efforts provided their valuation is
close enough to the top, thus providing a rationalization for the phenomena
demonstrated experimentally by Muller and Schotter (2003) and Noussair
and Silver (2005), — the phenomena that can not be explained within models
with either symmetric or two-contestant environments.
3
Qualitative Predictions
3.1
3.1.1
Participants and Drop-outs
Partial Drop-Outs
We start by examining partial drop-out, when the contestant is inactive
provided the own valuation is too low, but starts bidding positive amount
for high enough valuations. Description of the equilibrium bid distribution
at zero is a clear indicator of the (partial) drop-out behavior, which is used
to derive the following result.
Let n be the number
S of active contestants, that is, those who might place
a positive bid, n = # b>0 J (b).
Proposition 2 All active contestants choose zero as their lowest bid, bi (v) =
0 for all i. If v > 0 then either
1. All but one, n − 1, active contestants choose zero bid with positive
probability or
2. None of the active contestants does, so that Gi (0) = 0, and all are
infinitely more likely to choose the lowest bid than any other bid, that
is, limbց0 gi (b) = +∞ for all i.
Proposition 2 asserts that there is no equilibrium in which the lowest bid is
strictly positive. Moreover, only two scenarios are possible. First, exactly n−
1 of the active contestants bid zero if the valuation is sufficiently low, that is,
they drop-out with positive probability. Secondly, all the active contestants
bid a positive amount whenever their valuation is strictly positive, but anyone
is infinitely more likely to ‘drop-out’ than to exert any given positive effort
10
level in an equilibrium. Clearly, this last scenario is the only one possible in
a symmetric environment.
This finding suggests robustness of the result by Amann and Leininger
(1996) demonstrating possibility of drop-out behavior in the model with two
contestants. Also, drop-out behavior happens with positive probability under
complete information (Baye, Kovenock, and de Vries 1996).9
3.1.2
Complete Drop-Out
It is known that either in symmetric or two-contestant asymmetric environments, the highest ability individual exerts the highest equilibrium level of
effort. In contrast, asymmetric environments with more than two contestants
may give rise to a complete drop-out behavior, that is, in equilibrium a contestant exerts zero effort regardless of his valuation.
When contestants are risk-neutral, personal valuation attached to the
prize can be alternatively viewed as a reciprocal of one’s cost of effort, or
just as individual ability.
The following proposition states that when all the contestants are riskneutral and are likely to have high abilities; and among them there is a
contestant, say i, whose highest possible ability is substantially below the
average; and moreover, all the highest-ability types of the rivals exert the
highest equilibrium effort level, then contestant i should not participate in
the contest at all, no matter how able he is (or how much he desires the
prize). That is, contestant i should always exert zero effort level regardless
of his ability.
Proposition 3 Assume that contestants are risk-neutral. If
1. For all j, Fj weakly first-order stochastically dominates U [0, v j ];
2. There is an i such that the inequality v −1
i >
9
P
v −1
j
N −2
j6=i
holds;
In those equilibria, contestant j may never exert effort in (0, ej ) while exerting zero
effort and an effort above ej with positive probability. Note that in that case an equilibrium
strategy is a map from the values to a distribution over the set of bids and for the bids
belonging to the support of a contestant’s mixed strategy, so condition (2) should be
satisfied (with the probability of winning re-defined correspondingly). However, as the
first-order conditions of contestant i may not hold with equality in a neighborhood of
zero, which is the lowest equilibrium bid, the proof of Proposition 2 can not be employed,
∂
as under incomplete information, ∂b
Π(b|φi (b)) = 0 for all b ≥ 0.
11
3. For all j 6= i, φj (b) = v j ;
Then bi (v) = 0 for all v ∈ [v, v i ].
Notice that, since the smallest type is the same for all agents, v, the
agent does not participate despite the fact that there always exists a positive
probability that his ability is higher than the abilities of all the others.
The proposition can also be read as saying that for a fixed level of i’s
ability, say vi > v, the agent is not going to exert any effort, if the other
agents’ perceive him as having a ‘lower’ distribution of abilities (and it is
common knowledge), while the agent is going to exert effort, if the the other
agents’ perceive him as having a ‘higher’ distribution.
Some intuition for this result can be gained from the following observation. Lowering the upper bound of i’s valuation (and smoothly updating
his density, fi ) increases marginal probability of winning for the rivals, and
thus, their M B for low values of b (M Ci (b) = 1 in the risk-neutral case),
thus intensifying competition for participants with low abilities, but that decreases the chances of i to win, and, therefore, his expected profit, making
him better-off not participating if his v i and, thus, his probability of winning,
is low enough.
This proposition can be also used for cases in which a subgroup of the
agents never bid. In other words, the proposition can be applied to rule
out participation of several contestants. For example, when valuations are
uniformly distributed, Parreiras (2006) characterizes the set of agents who
never exert effort as a function of the primitives of the model.
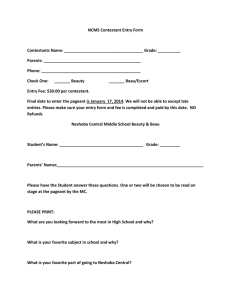
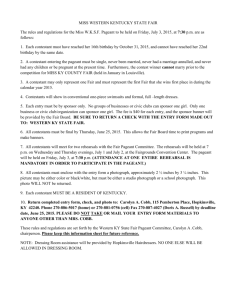
Example 1 Let N = 3 and assume individual abilities are uniformly distributed, that is, Fi (v) = αvi for 0 ≤ v ≤ vi , and let α1 = 6 and α2 = 3. If
α3 < 2, the third agent drops-out completely, b3 (v) ≡ 0.10
Notice that when v3 = 1.5, agent 3 has one out of eight chance of having
the highest valuation, but he is only going to exert positive effort when the
others perceive him as being sufficiently ‘strong’, that is, when α3 > 2. Figure
1 depicts the agents’ payoffs as α3 increases from 1 to 8.
The next proposition shows that complete drop-out is inconsistent with an
equilibrium (in the risk-neutral case) for contestants whose highest possible
10
We refer the reader to the working paper version of this paper, Parreiras and
Rubinchik-Pessach (2006), or also Parreiras (2006) for the complete characterization of
the equilibrium and payoffs in the uniform case.
12
1.5
Π1
0.5
0
2
3
4 α 5
6
7
8
Figure 1: The players’ payoffs as functions of α3
ability is the same. In particular, even if contestant i has an arbitrarily ‘low’
distribution of abilities, say, in the first-order stochastic dominance sense, it
is not enough to yield a complete drop-out, moreover, i will bid in the same
interval as his ‘stronger’ rival j, if the distributions of abilities of the two
have common support. Hence, common-knowledge that the agent’s highest
possible ability, v i , is different from the others, is crucial for the complete
drop-out result.
Proposition 4 Assume that the contestants are risk-neutral and assume valuations of contestants i and j have common support, that is, v i = v j . If
bi (v i ) = b, then bj (v j ) = b.
3.2
Workaholics
In the introduction we mentioned that the two-contestant model and the
symmetric model with many contestants, that were analyzed in the previous
literature, can be tackled within the current framework. Let us start with
these cases to assert that neither of them can generate workaholic behavior.
Indeed, the effort density is monotonically decreasing for each contestant
under symmetry or if there are two players only, simply meaning that higher
efforts are chosen less frequently by all participants.
Proposition 5 Assume that contestants are risk-neutral and at least one
of the following conditions is satisfied: (1) the distribution of abilities is
13
the same for all contestants (symmetric model); (2) there are only two contestants. Then, the equilibrium bid probability density function of any contestant is non-increasing.
We can even strengthen the previous finding by allowing the agents to
be risk averse. Provided the distribution of valuations is the same for all
and their risk attitudes are the same as well (and satisfy CARA), higher
efforts are still more rare in equilibrium, thus, eliminating the second mode
of the distribution of bids discussed in the experimental literature. The same
result is true in the presence of only two contestants with potentially different
coefficients of risk aversion.
Proposition 6 Assume contestants’ utility functions exhibit constant absolute risk aversion and the distribution of valuations is the same for all.
Also, assume that at least one of the following conditions is satisfied: (1) the
risk-aversion parameter is the same for all contestants; (2) there are only
two contestants. Then, the equilibrium bid probability density function of
any contestant is non-increasing.
In contrast, in the presence of asymmetry competition for the prize might
become fierce. We start with the risk-neutral case in which distributions of
abilities differ across contestants, e.g., some might be perceived as ‘strong’
opponents, while the others are viewed as ‘weak.’ Interestingly enough, it is
the ‘weak’ contestant — the rivals of whom dismiss almost completely the
possibility of her having a high value for the prize, or of her being of the
top ability, — it is she who might race to the bottom. The ex-ante weak
contestant will do so, provided her ability is, in fact, very high, or close
to be the highest — exactly the case almost entirely “overlooked” by her
opponents. Provided they are competing mainly among themselves, almost
ignoring their weak rival (when placing high bids), it is in the interest of that
weak contestant to exert high effort as the chance of winning from doing
so for her is sufficiently high. Of course, the rivals are fully aware of the
equilibrium strategy of the weak contestant, but in their eyes the likelihood
of their opponent being very able and aggressive is sufficiently small, thus,
for each of the strong contestants, standing against other strong rivals is
relatively more important, and they, indeed, almost ignore the presence of
the weak. That is the core intuition behind the following proposition.
14
Proposition 7 Assume contestants are risk-neutral and there are more than
two contestants. In addition, assume all contestants are bidding in the same
interval. Then, there are distributions of valuations such that some contestants’ effort density is increasing at high effort levels, so that whenever
for some contestant i
1
1 X 1
−
>v
fi (v) N − 2 j6=i fj (v)
(6)
we have gi′ (b) > 0.
The next example illustrates this proposition. By Proposition 4, it is
sufficient to have the participants’ abilities lie within a common interval
in order to satisfy assumption requiring common bidding interval. Finally,
condition (6) requires one of the contestants, i, to be of the highest ability
‘rare enough,’ let us refer to this person as ‘underdog.’ In the example,
the underdog is contestant
1, for whom f1 (v) = 0, while fj (v̄) = 1, so
P
limv→v̄ fi1(v) − N 1−2 j6=i fj1(v) = ∞.
Example 2 All three contestants are risk neutral, their abilities assume values within interval [0, 1]. Player 1’s ability is distributed F1 (v1 ) = 2v1 − v12
and the ability of player j ∈ {2, 3} is distributed uniformly, Fj (vj ) = vj .
To formulate the equilibrium in this example we define auxiliary function
Q : [0, 1] −→ [0, 1] that maps the value of bidder one, v, into the type of
bidders 2, 3, who bid the same bid as the first bidder.
Q (v) =
1 e2
.
v 2 e2/v
(7)
Its inverse Q−1 exists and, it is differentiable in (0, 1].11
4(v−1)
2
3 exp
v
32 − 8v − 4v − v
Lemma 1 The strategies b1 (v) =
and bj (v) =
32
v3
b1 (Q−1 (v)), j ∈ {2, 3} are a Bayes–Nash equilibrium for the contest game of
Example 2.
11
The function Q is a bijection because limv→0 Q(v) = 0, Q(1) = 1 and Q′ > 0.
15
It follows, the bid density of player 1 is
g1 (b) =
f1 (φ1 (b)) φ′1 (b)
f1 (φ1 (b))
φ1 (b)5
= ′
=
exp
b1 (φ1 (b))
2
4
−4 ,
φ1 (b)
which is increasing for high effort levels, as its derivative,
φ1 (b)4
4
4
′
′
g1 (b) = φ1 (b)
exp
−4 5−
,
2
φ1 (b)
φ1 (b)
evaluated in a neighborhood of b is positive, since φ′1 > 0 and φ1 (b) = 1.
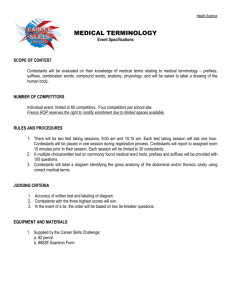
We use a parametric plot, [x(v), y(v)] = [b1 (v), g1 (b1 (v))], to display the
graph of the bid density of player 1 without solving explicitly for φ1 (b). The
density increases for high effort levels, chosen in equilibrium by player 1, in
case he has high ability.
0.56
0.54
0.52
Density
0.5
0.48
0.46
0.3
0.35
0.4
0.45
0.5
0.55
Bids
Figure 2: The bid density, g1 (b), evaluated at high bids.
16
Next result demonstrates that if the contestants differ by their attitudes
towards risk, similar conclusion to that in Proposition 7 can be obtained.
Here a weak contestant — in this case the contestant who is more risk averse
— faces stronger rivals, who are, say, risk-neutral. In this case, we show that
the weaker one intensifies her effort at higher valuations.
Proposition 8 Assume contestants’ utility functions exhibit constant absolute risk aversion and the distribution of valuations is the same for all.
Also assume there are more than two contestants.
Then there exist parameters such that some contestant’s effort density
function is increasing at high effort levels, say, if all contestant but contestant
1 are risk neutral and contestant 1 is sufficiently risk averse, ρ1 > v2 (N1 −2) ,
then g1′ b̄ > 0.
The underlying intuition is similar to the one for the risk-neutral case:
bidding is risky, as losers are not compensated; so a risk-averse agent chooses
to bid at the top more frequently, as it ‘almost assures’ the prize. He can
‘afford’ bidding high, if own value is sufficiently high, thus the increase in
frequency at the top. If this effect is sufficiently unimportant to the rivals
(there are many of them), it prevails in equilibrium.
Interestingly, if we look at a general case with risk-averse (not necessarily
CARA) contestants, the ‘weak’ agent is always more likely to choose high
effort levels.
Proposition 9 Assume contestant i is strictly more risk averse than contestant j and the highest equilibrium effort level of all contestants
is the same,
b. Then there exists δ > 0 such that for all 0 < ε < δ, Gi b − ε < Gj b − ε
and Gi (ε) < Gj (ε).
The second claim also implies that a more risk-averse contestant is less
likely to exert low effort levels, that is, at the tails of the effort distribution,
this contestant is more aggressive than his less risk-averse rival. At first
glance, this result appears similar to the findings of Fibich, Gavious, and
Sela (2004), who showed that the bidding behavior is more ‘aggressive’ in
the symmetric equilibrium with moderately risk-averse agents as compared
to that in the symmetric equilibrium with risk-neutral agents, thus, providing
comparative statics for a symmetric model. Notice however, that Proposition
9, compares the behavior of two different agents with arbitrary degrees of
17
risk-aversion at any given equilibrium. This result generates a prediction that
(other things being equal) it is risk aversion of a participant that might drive
her higher-than-average effort (say, among contestants with the near-the-top
desire to win).
The more aggressive behavior of a ‘weaker’ contestant is no longer true
in the risk-neutral framework. In this case, a contestant with the first-orderdominated distribution of abilities is more timid than his stronger rivals.
More formally, i is weaker than j, if the distribution of abilities Fj strictly
first-order stochastically dominates Fi , or Fj ≻ Fi , so that Fj (v) < Fi (v) for
all v ∈ (v, v), where [v, v] is the common support of the two distributions.
Proposition 10 If agents are risk-neutral and the distributions Fi and Fj
have the same support, [v, v], then Fj ≻ Fi implies Gj ≻ Gi .
In particular, it follows that a weaker contestant is choosing lowest effort
more often and highest effort less often than a stronger one. It is important
to remember that although the weak contestant is more likely to exert top
effort than an intermediate one, as his effort density is increasing, it is still
below the (possibly decreasing) effort density of a strong contestant.
4
Conclusions
We have characterized equilibria in winner-take-all contests with many
heterogeneous contestants. Our methodology can also be applied to the Warof-Attrition contests: the characterization in Proposition 1 still holds when
Si is modified accordingly to reflect the marginal cost of bidding, M Ci (b) ≡
u′i (w − b) (1 − Wi (b)).
We show that contests with many heterogeneous agents are qualitatively
distinct from contests with only two agents and from contests with homogeneous agents.
First, we show that when a contestant is perceived to be ‘weak’ by his
‘strong’ rivals, the contestant may choose to exert zero effort regardless of his
value for the prize — even when there is a non-negligible probability that the
contestant has the highest value for the prize. Parreiras (2006) builds on the
possibility of complete drop-out to investigate a model where agents invest
in human capital and hence, the distributions of valuations are endogenous.
Secondly, we have shown that ‘weak’ contestants might bid very aggressively provided their valuation for winning is close to the top. Indeed, if all
18
contestants are risk neutral and if all of them, except one, believe that their
weak rival (‘underdog’) is very unlikely to have a high valuation for the prize
or be of a high ability, their equilibrium behavior will be almost unaffected
by the presence of the underdog, at least at the top valuations, that is, they
will compete mainly against each other. However, in case the underdog does
have a high ability, he has a decent chance of winning by exerting top effort,
and so he does, in equilibrium. Ironically, it is the pessimistic belief about
the abilities of this contestant, the belief shared by his rivals, that endows
the high-ability underdog with the informational rent making the race to the
bottom worthwhile.
Also we show that a sufficiently risk averse (CARA) contestant facing
enough risk neutral rivals will bid aggressively at the top and, as in the
previous case, her bid density will be increasing at the top valuations.
Having suggested a possible explanation of the past experimental evidence, our results offer directions for future experimental investigations.
References
Amann, E., and W. Leininger (1996): “Asymmetric All-Pay Auctions
with Incomplete Information: The Two Player Case,” Games and Economic Behavior, 14, 1–18.
Athey, S. (2001): “Single Crossing Properties and The Existence of Pure
Strategy Equilibria In Games of Incomplete Information,” Econometrica,
60, 861–889.
Baye, M. R., D. Kovenock, and C. G. de Vries (1993): “Rigging the
Lobbying Process: An Application of the All-Pay Auction,” The American
Economic Review, 83(1), 289–294.
(1996): “The All-Pay Auction With Complete Information,” Economic Theory, 8, 291–305.
Che, Y. K., and I. L. Gale (1998): “Caps on Political Lobbying,” American Economic Review, 88(3), 643–51.
Fibich, G., A. Gavious, and A. Sela (2004): “All-Pay Auctions With
Weakly Risk-Averse Bidders,” Tel-Aviv University.
19
Gavious, A., B. Moldovanu, and A. Sela (2002): “Bid Costs and
Endogenous Bid Caps,” Rand Journal of Economics, 33(4), 709–722.
Hillman, A. L., and J. G. Riley (1989): “Politically Contestable Rents
and Transfers,” Economics and Politics, 1, 17–39.
Kirchamp, O. (2005): “Less fighting than expected – experiments with
Wars of Attrition and All-Pay Auctions,” Manheim University.
Krishna, V., and J. Morgan (1997): “An Analysis of the War of Attrition
and the All-Pay Auction,” Journal of Economic Theory, 72, 343–362.
Lebrun, B. (1999): “First Price Auctions in The Asymmetric N Bidder
Case,” International Economic Review, 40(1), 125–142.
Lizzeri, A., and N. Persico (1998): “Uniqueness and Existence of Equilibrium In Auctions With A Reserve Price,” Games and Economic Behavior, 30, 83–114.
Muller, W., and A. Schotter (2003): “Workaholics and Drop Outs in
Optimal Organizations,” NY University.
Noussair, C., and J. Silver (2005): “Behavior in All-Pay Auctions with
Incomplete Information,” Games and Economic Behavior, online release.
Parreiras, S. O. (2006): “Winner-Take-All Contests with Endogenous
Human Capital Formation,” UNC at Chapel Hill.
Parreiras, S. O., and A. Rubinchik-Pessach (2006): “Contests with Heterogeneous Agents,” CORE Discussion Paper 2006/04,
http://www.core.ucl.ac.be/services/psfiles/dp06/dp2006 4.pdf.
20
A
A.1
Auxilliary Results
Monotonicity Of Equilibrium Bid Functions
Let b be a Nash equilibrium profile in non-decreasing strategies. For
any Borel set A ⊂ R, Q
define µGi (A) = Pr[bi (Vi ) ∈ A] and µWi (A) =
Pr[maxj6=i bj (Vj ) ∈ A] = j6=i Gj (A).
That is, µGi (respectively µWi ) is the measure associated to the cumulative
probability distribution function, Gi (respectively Wi ).
Lemma 2 The measure µGi has no atoms at b > b.
Proof. If a positive mass of types of contestant i bids b then limeրb Wj (e) <
Wj (b) < Wj (b + δ) for any δ > 0 because of the tie braking rule – when a tie
happens, the object is randomly allocated, with equal probabilities, among
all contestants who exert the highest effort level. As a result, the left and
right derivatives ‘explode’, that is, Wj′ − (b) = Wj′ + (b) = +∞. Therefore,
the type of, say contestant j, who bids b in equilibrium will be strictly better
of by raising its bid marginally above b. The marginal cost of raising the bid,
M C(b) = u′j (w − b) (1 − Wj (b)) + u′j (vj − b + w)Wj (b) increases discontinuously, yet it remains bounded while the marginal benefit of increasing the
bid is unbounded, M B(b) = [uj (vj − b + w) − uj (w − b)] Wj′ (b) .
As a result of the above lemma, when v > φi (0), bids must be strictly
increasing and so the inverse bid functions are strictly increasing.
A.2
Continuity of The Generalized Inverse Bids
Lemma 3 For any contestant i, φi is continuous.
Proof. If φi were discontinuous at b > b then Gi would have an atom at b
contradicting Lemma 2. Hence, we must establish that φ is right continuous
at b. Suppose that φi fails to be right continuous at any b – that is, there is
a δ > 0 such that φi (b) < φi (b) + δ < φi (b + ε) for any ε > 0. In other words,
type φi (b) + δ bids strictly above b and strictly below b + ε for any ε > 0,
which is a contradiction.
A.3
The Lowest Equilibrium Bid
Lemma 4 For all i = 1, . . . , N , bi (v) = 0.
21
Proof. Assume that for bi (v) = β > 0. Since the equilibrium is monotone,
the probability contestant j 6= i wins by bidding at or below β is zero. As
a result, either bj (v) = 0 or bj (v) ≥ β. In sum, Gj (β) = Gj (0) for j 6= i
(Gi (β) = Pr[bi (V ) < β] since Gi is non-atomic). Now, if Gj (β) = Gj (0) > 0,
for all j 6= i, then Wi (β − ε) = Wi (β) for some ε > 0. Therefore, bidding
β − ε yields a higher payoff than bidding β. On the other hand, when
Gj (β) = Gj (0) = 0, for some j, then Wi (β) = 0 and so, bidding zero yields
a higher payoff than bidding β.
A.4
Uniqueness
Let φ(b) = (φ1 (b), . . . , φ2 (b)) and write,
Q
Q
u′i (w − b) 1 − j6=i Fj (φj ) + u′i (φi − b + w)
F
(φ
)
j
j
j6=i
Q
Si (b, φ) ≡
.
j6=i Fj (φj ) (ui (φi − b + w) − ui (w − b))
Proposition 11 Assume that: for all i, bi is continuous, fi is continuous
and uniformly bounded above zero in its support, [v, v]; then, the system of
differential equations,
"
#
Q
X
F
(φ
)
∂
j
j
j6=i
φi =
Sj (b, φ) − (N − 2)Si (b, φ) , i = 1, . . . , N ,
∂b
fi (φi )
j6=i
has a unique solution that satisfies the terminal condition, φ(b) = (v, . . . , v).
Proof. There is a neighborhood of b, φ(b) such that the system satisfies
the Lipschitz condition because, for all i: fi is continuous and bounded away
from zero and;
Si is continuous in (b, φ) and bounded in a small neighborhood
of b, φ(b) . Consequently, the solution φ(b) is locally (restricted to this
neighborhood) unique.
Furthermore, as long as φi (b) > v for all i, there is a neighborhood of
(b, φ(b)) where the Lipschitz condition is satisfied. Therefore, φ(b) can be
further extended by continuity, in a unique way, from b to b where, b is
defined as the largest b < b such that there is at least one contestant, say k,
such that φk (b) = v. Lemma 4 above establishes that b = 0 and that allow us
to pin-down the value of b using the condition, φk (0) = v. It is important to
notice that there is no guarantee that the above unique solution corresponds
to an equilibrium. For example, it is conceivable that φ′ (b) < 0 for some b
22
and i. One needs to prove that all contestants are active in order to show that
the above solution corresponds to an equilibrium, that is, J(b) = {1, . . . , N }
for any b ∈ (0, b). Indeed, since for any contestant i, v i = v, Proposition
4 implies that bi (v) = b. In addition, since strategies are continuous (by
assumption) and strictly increasing, for any b ∈ (0, b) and any i, there is v
such that bi (v) = b.
B
B.1
Main Results
The System of First Order Conditions
Recall the bidding strategies of the contestants are denoted by bi : [v, v i ] →
R+ . For every bid b ≥ 0 denote the set of active contestants at b, that is,
contestants that choose this bid for some of their type realizations:
J (b) = {j ∈ {1, .., N } |∃vj ∈ [v, v i ] : bj (vj ) = b} ,
and write K(b) = #J(b) for the cardinality of J, the number of active contestants at b.
Proof of Proposition 1. Consider contestant i ∈ {1, .., N } . Fix the strategies of other contestants, thereby determining set J (b) \{i} for any b. If at
some given b > 0 condition
X Y
[ui (vi − b + w) − ui (w − b)]
Gk (b)gj (b)+
j∈J(b)\{i} k6=i,j
− [u′i (vi − b + w) − u′i (w − b)]
Y
Gj (b) − u′i (w − b) ≤ 0, i ∈ J(b) (8)
j∈J(b)\{i}
is satisfied with equality, then let bi (vi ) = b. Otherwise, bi (vi ) = 0.
As we restrict attention to non-decreasing strategies, the highest bid of
contestant i is the optimal bid for the highest type of that contestant, bi (v i ) =
bi . In addition, there are at least two contestants, k, l whose
highest types
place the highest equilibrium bid, bk = bl = maxi∈{1,..,N } bi . Then for any
b ∈ (0, bk ], K(b) ≥ 2.
Secondly, for b ∈ bi ([v, v i ])\ {0}, the system (8) is satisfied as equality.
Rewrite it as
X gj (b)
= Si (b) ,
G
j (b)
j6=i
23
for i ∈ j ∈ {1, .., N } |bi > 0 . Recall,
Wi (b) u′i (vi − b + w) + (1 − Wi (b)) u′i (w − b)
> 0,
Wi (b) (ui (vi − b + w) − ui (w − b))
Y
Wi (b) =
Gj (b).
Si (b) ≡
j6=i
The system of equations is linear in
gj (b)
Gj (b)
that allows us to solve it as follows:
gj (b)
=
Gj (b) i∈J(b)
0 1 ···
1 0 · · ·
where M = .. ..
..
. .
.
1 ... 1
M −1 (Si (b))i∈J(b) ,
1
1
.. ,
.
0
Note that the inverse of the K by K matrix
− (K − 2)
1
1
− (K − 2)
1
..
..
K −1
.
.
1
...
Therefore, gi (b) =
B.2
Gi (b)
(K(b)−1)
(9)
(10)
M , with K ≥ 2 is
···
1
···
1
.
..
..
.
.
1 − (K − 2)
S
(b)
−
(K(b)
−
2)S
(b)
for b ∈ B.
i
j∈J(b)\{i} j
P
Participation Results
Proof of Proposition 2. First, the lowest effort should be zero by the
Lemma 4. Clearly, there should be at least one contestant that does not
choose b = 0 with a strictly positive probability. Call this contestant k. If
there are only two active contestants, the proposition reduces to Lemma 5
of Amann and Leininger (1996, p. 6). Let’s then assume that there are at
least 3 active contestants and moreover, to simplify notation and without
any loss of generality, we shall assume all contestants are active. Consider
a pair of active contestants i, j distinct from k. For these contestants, their
respective winning probability approaches zero as b → 0 in the presence
24
of contestant k. By definition of winning probability, we have the following
identity Wi (b)Gi (b) = Wj (b)Gj (b), so
Gj (b)
Wi (b)
W ′ (b)
= lim
= lim i′
bց0 Gi (b)
bց0 Wj (b)
bց0 Wj (b)
lim
where the last equality follows from the L’Hôpital’s Rule.
Notice that even when Gi (0) > 0, the first order condition holds with
equality for type φi (0). Thus, using the first order conditions, (2)
Wi′ (b)
u′i (w)
uj (φj (0) + w) − uj (w)
=
< ∞,
′
bց0 Wj (b)
ui (φi (0) + w) − ui (w)
u′j (w)
lim
since φi and φj are right continuous, φi ≥ v, φj ≥ v and, v > 0 by assumption.
As a result,
u′i (w)
uj (φj (0) + w) − uj (w)
Gj (b)
=
< ∞.
bց0 Gi (b)
ui (φi (0) + w) − ui (w)
u′j (w)
lim
(11)
It follows that only two scenarios are possible. First, both bid distributions
might have an atom at zero, Gi (0) > 0, Gj (0) > 0 or secondly, it might
happen that i and j start bidding at zero, so that Gi (0) = Gj (0) = 0. For
a given choice of k and i, since the choice of j (distinct from i and k) can
be made arbitrarily, either n − 1 contestants choose zero bid with positive
probability or none does.
In the case where, Gi (0) = 0 for all i, the first-order conditions imply
the marginal winning probabilities are be strictly greater than zero, Wi′ (0) =
u′i (w−b)
> 0. The last observation coupled with the fact that, for all
ui (v−b+w)−ui (w−b)P
Q
′
b > 0, Wi (b) = j6=i k6=i,j Gk (b)gj (b), implies that, at least for some j 6= i,
the density gj must ‘explode’ at zero. Otherwise, if all densities were finite at
zero, we would have Wi′ (0) = 0, which is not possible. Furthermore, if at least
one density ‘explodes’, all densities must ‘explode’ as well. Using L’Hôpital’s
g (b)
G (b)
Rule again, for any i, limbց0 gji (b) = limbց0 Gji (b) < +∞, we conclude that
limbց0 gj (b) = +∞, if and only if, limbց0 gi (b) = +∞.
Proof of Proposition 3. In the case where the contestants are risk neutral
the system
T of first order conditions admits the following solution for almost
all b ∈ N
i=1 bi ([v, v i ])
P Gk (b)
Gi (b)
k6=i φk (b) − (N − 2) φi (b)
Q
gi (b) =
,
(12)
(N − 1) j6=i Gj (b)
25
indeed, in this case Si (b) = vi Q 1 Gj (b) .
j6=i
As Fj first-order stochastically dominates U [0, v j ] for all j, it follows
Pj6=i Fj (φj ) P v−1
P G (b)
φj
i j
< j6N=−2
, which implies that j6=i φjj(b) < (N − 2) v1i , and,
that
N −2
therefore, the highest ability type of contestant i will not bid b > 0 since his
first-order condition is negative, so bi (v i ) = 0. Moreover, since the equilibrium is monotone, bi (v) = 0 for all v.
Proof of Proposition 4.
If bj (v j ) = β < b and bi (v i ) = b then, by
revealed preferences, it must be that v j Wj (β) − bj (v j ) ≥ v j − b = v i − b >
v i Wi (β) − bj (v j ) > v i Wj (β) − bj (v j ) = v j Wj (β) − bj (v j ) since Wj (bj (v j )) 1 =
Wi (β)Gi (β); but this result is a contradiction.
B.3
Ex-ante Asymmetry
Proof of Propositions 5 and 7.
When all the contestants have identical distributions, equation (12) reads:
g (b) =
G(b)
φ(b)
(N − 1)G (b)
N −1
=
1
(N − 1)φ (b) G (b)N −2
.
Note that both φ and G are increasing in b, so g must be decreasing in b.
Allowing for different distributions and setting N = 2, equation (12) give
us,
gi (b) =
Gj (b)
φj (b)
Gj (b)
=
1
,
φj (b)
so the density for i = 1, 2 is decreasing as well. This completes the proof of
Proposition (5) . Next,
gi′
(b) =
P
k6=i
i (φi (b))
k (φk (b))
− (N − 2)gi (b) φi (b)−G(φi (b)/f
gk (b) φk (b)−G(φk (b)/f
2
2
i (b))
k (b))
Q
(N − 1) j6=i Gj (b)
(b)
XY
− (N − 2) Gφii(b)
Gk (b)gj (b).
−
2
Q
j6
=
i
k6
=
i,j
G
(b)
(N − 1)
j6=i j
Gk (b)
k6=i φk (b)
P
26
Then
gi′ b
v − 1/fk (v)
v − 1/fi (v)
gk (b)
− (N − 2)gi (b)
2
v
v2
k6=i
1 1X
−
gj (b)
N − 1 v j6=i
1
=
N −1
X
Also,
gj (b) =
!
1
, for all j,
(N − 1)v
so
gi′ b
1
=
(N − 1)2 v 2
X
1
=
(N − 1)2 v 2
N −2 X 1
−
− (N − 2)v
fi (v)
f
k (v)
k6=i
(v − 1/fk (v)) − (N − 2) (v − 1/fi (v)) − (N − 1) v
k6=i
!
which is positive if fi (v̄) is sufficiently small (relative to fk (v̄)).
Proof of Proposition 10. Notice that Fj ≻ Fi implies the weak inequality
fi (v) ≤ fj (v), to simplify this proof, we assume the strict inequality, fi (v) <
fj (v).
1. Assume that Gi and Gj cross or are tangent at some point in the interior
of support of equilibrium effort levels, b∗ ∈ (0, b). In this case, it follows
that Gi (b∗ ) = Gj (b∗ ) together with Fj ≻ Fi imply that φi (b∗ ) < φj (b∗ ).
Moreover, from Gi (b∗ ) = Gj (b∗ ), φi (b∗ ) < φj (b∗ ), and the characterization of the effort densities (12), it follows that gi (b∗ ) < gj (b∗ ). In sum,
Gi and Gj can not be tangent at any b ∈ (0, b) and moreover, if Gi and
Gj cross then Gj must intersect Gi from below.
2. At the boundaries of the support of the equilibrium effort levels, 0
and b, the distributions of effort may be tangent. In particular, a
direct inspection of (12) reveals that the they are tangent at b, that
is, Gi (b) = Gj (b) = 1 and gi (b) = gj (b), where b = bi (v) = bj (v) as
established by Proposition 4. These equalities and the expression for
the derivative of the effort density, (5), yield gi′ (b) ≥ gj′ (b), if and only
if, fi (v) ≤ fj (v). But, Fj ≻ Fi implies fi (v) ≤ fj (v). Moreover, by
27
!
(13)
assumption fi (v) < fj (v) and therefore gi′ (b) > gj′ (b). As a result, there
is an δ > 0 such that for any ε < δ, gi (b − ε) < gj (b − ε). This last
result implies that Gi (b − ε) > Gj (b − ε). Put simply, also at the top
b, Gj must intersect Gi from below.
The conclusions of 1 and 2 above imply that Gi and Gj can never intersect
in the interior of the support and, Gi is always above Gj .
B.4
Different Attitudes Towards Risk
Proof of Propositions 6 and 8. In the model with CARA agents, ui (x) =
exp(−ρi x)
. To avoid cumbersome notation, we present the proof for the
ρi
case in which all the agents bid in the same interval. For this environment,
(4) becomes,
−
u′i (w − b) (1 − Wi (b)) + u′i (vi − b + w)Wi (b)
Wi (b) (ui (vi − b + w) − ui (w − b))
ρi
1
=
− Wi (b) ,
Wi (b) (1 − e−ρi φi (b) )
Si (b) =
(14)
so, by proposition 1,
Gi (b)
gi (b) =
N −1
X
!
Sj (b) − (N − 2) Si (b) =
j6=i
Gi (b)
=
(N − 1)
(
− (N − 2)
X
j6=i
1
− Wj (b)
1 − exp (−φj ρj )
1
− Wi (b)
1 − exp (−φi ρi )
ρj
Wj (b)
ρi
Wi (b)
(15)
When N = 2, this reduces to:
gj (b) =
ρi
− ρi Gj (b) , i 6= j
1 − exp(−ρi φi (b))
(16)
Since both φ(·) and Gj (·) are increasing in b, it follows that gj is decreasing
in b. This proves half of Proposition 6.
When agents are symmetric with respect to risk aversion parameter, that
is, when ρi = ρ for all i ∈ {1, .., N }, then in a symmetric equilibrium, inverse
28
bids are the same, φi = φ, and so is the effort density, gi = g for all i ∈
{1, .., N } . Then (15) reduces to:
g (b) =
ρ
ρG (b)
−
.
N
−2
[1 − exp(−ρφ(b))] (N − 1)G
(b) N − 1
(17)
Once more, since both φ(·) and G(·) are increasing in b, it follows that g is
decreasing in b. This concludes the proof of Proposition 6.
To prove Proposition 8 we present conditions under which the density of
effort is increasing in a neighborhood of the highest equilibrium effort. For
than note that by (14)
Si′
ρi
(b) = −
Wi (b)2 1 −
∂Wi (b)
∂b
1
exp(ρi φi (b))
ρ2i
−
Wi (b)
∂φi (b)
∂b
exp (ρi φi (b)) 1 −
1
exp(ρi φi (b))
2 .
Given the definition of the winning probability of contestant i and (18),
XY
G k b gj b =
Wi′ b =
j6=i k6=i,j
X
=
j6=i
Also, by definition of gi , we have
gj b = Si b .
∂φi (b)
∂b
=
gi (b)
,
f (v̄)
Si′ b = − (exp (ρi v̄)) Si2
using the identity,
1
1−
we have
Si′
ρi
Si (b)+ρi
therefore,
!
gi b
1+
f (v̄)
= exp (ρi v̄) ,
!
gi b
b =− 1+
Si b + ρi Si b .
f (v̄)
29
By first order conditions (3) ,
X
gj′ b
j6=i
= Si′ b +
X
gj b
j6=i
!2
!
gi b
= Si b − 1 +
S i b + ρi S i b
f b
!
gi b
S i b + ρi + ρi
= −Si b
f b
2
It follows that
(N − 1) g2′ b
= −S1 b
(N − 2) g2′ b + g1′ b = −S2 b
Therefore,
g1′ b
!
g1 b
S 1 b + ρ1 + ρ1 < 0
f b
!
g2 b
S 2 b + ρ2 + ρ2
f b
!
g2 b
S 2 b + ρ2 + ρ2
= −S2 b
f (v̄)
!
g1 b
(N − 2)
S1 b
S 1 b + ρ1 + ρ1
+
(N − 1)
f (v̄)
ρi exp(−ρi v̄)
Note that if ρ2 = 0, then S2 b = limρi →0
= v̄1 , also g2 b =
1 − exp(−ρi v̄)
S1 (b)
, so
(N −1)
g1′
(N − 1)
g1 b
b
= S1 b S1 b
+ ρ1
(N − 2)
f (v̄)
!
!
g1 b
1
+1 − 2
,
f (v̄)
v̄ (N − 2)
which is positive,
providedN is large enough or ρ1 is sufficiently big. Indeed,
S1 b = ρ1 1−e1−ρ1 v̄ − 1 > 0 and the term it multiplies is at least as high
(
)
1
as ρ1 − v2 (N −2) .
30
Note also, that ρ1 and N being high does not prevent the first contestant
from participating, as his effort density at the top is still positive (recall Si b
is decreasing in ρi )
(N − 2)
S2 b
1
g1 b = S 2 b −
S1 b ≥
=
≥ 0,
(N − 1)
(N − 1)
v̄ (N − 1)
which is consistent with him bidding at the top. This concludes the proof.
Proof of Proposition 9.
1. To prove the first assertion,
let us evaluate the necessary conditions (5)
b = b, noting that Wi b = 1 for all i,
#
"
X
1
(18)
Sj b − (N − 2)Si b
gi (b) =
N − 1 j6=i
′
ui v − b + w
Si b =
(19)
ui v − b + w − u i w − b
Without loss of generality wecan normalize the
utility functions of i
′
′
and j such that ui v − b + w = uj v − b + w and ui v − b + w =
uj v − b + w . As i is more risk averse than j, ui is a concave transformation of uj , so after
ui (x) ≤ uj (x) for any x,
the transformation
in particular, ui w − b < uj w − b . It follows that Si b < Sj b ,
so gi (b) > gj (b), as required.
2. By (11),
u′i (w)
uj (v + w) − uj (w)
Gj (b)
=
bց0 Gi (b)
ui (v + w) − ui (w)
u′j (w)
lim
Normalizing the Bernoulli functions, again, such that u′i (w) = u′j (w)
and ui (w) = uj (w), and given that i is strictly more risk averse, ui (v +
Gj (b)
w) < uj (v + w), so limbց0
> 1, as required.
Gi (b)
31
C
The Example
It suffices to establish that the
inverse bid functions satisfy the following system of differential equations:
Sketch of the Proof of Proposition 1.
φ1 (b)
(2 − 2φ1 (b))φ2 (b)2
2 − φ1 (b)
φ′2 (b) =
φ1 (b)φ2 (b)
φ′1 (b) =
It is easy to show that using the identities Q(φ1 (b)) = φ2 (b) and bj (φj (b)) = b,
j = 1, 2. The complete proof is available on request.
32