Real-Time Operating Systems With Example PICOS18 What is an Operating System?
advertisement

Real-Time Operating Systems
With Example PICOS18
Sebastian Fischmeister
1
What is an Operating System?
A program that acts as an intermediary between a user
of a computer and the computer hardware
Operating system goals:
o Execute user programs and make solving user problems
easier.
o Make the computer system convenient to use
Use the computer hardware in an efficient manner
CSE480/CIS700
S. Fischmeister
2
1
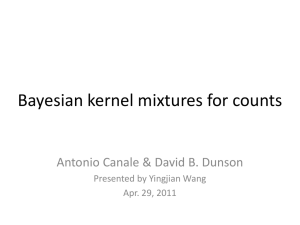
Computer System Components
1. Hardware – provides basic computing resources (CPU,
memory, I/O devices)
2. Operating system – controls and coordinates the use of
the hardware among the various application programs
for the various users
3. Applications programs – define the ways in which the
system resources are used to solve the computing
problems of the users (compilers, database systems,
video games, business programs)
4. Users (people, machines, other computers)
CSE480/CIS700
S. Fischmeister
3
Abstract View of System Components
CSE480/CIS700
S. Fischmeister
4
2
What is an RTOS?
Often used as a control device in a dedicated application
such as controlling scientific experiments, medical
imaging systems, industrial control systems, and some
display systems
Well-defined fixed-time constraints
CSE480/CIS700
S. Fischmeister
5
More Precisely?
The system allows access to sensitive resources with
defined response times.
o Maximum response times are good for hard real-time
o Average response times are ok for soft real-time
Any system that provides the above can be classified as
a real-time system
o 10us for a context switch, ok?
o 10s for a context switch, ok?
CSE480/CIS700
S. Fischmeister
6
3
Taxonomy of RTOSs
Small, fast, proprietary kernels
RT extensions to commercial timesharing systems
Component-based kernels
University-based kernels
CSE480/CIS700
S. Fischmeister
7
Small, Fast, Proprietary Kernels
They come in two varieties:
o Homegrown
o Commercial offerings
Usually used for small embedded systems
Typically specialized for one particular application
Typically stripped down and optimized versions:
o
o
o
o
Fast context switch
Small size, limited functionality
Low interrupt latency
Fixed or variable sized partitions for memory management
PICOS18, pSOS, MicroC, …
CSE480/CIS700
S. Fischmeister
8
4
RT Extensions
A common approach is to extend Unix
o Linux: RT-Linux, RTLinuxPro, RTAI,
o Posix: RT-Posix
o MACH: RT-MACH
Also done for Windows based on virtualization.
Generally slower and less predictable.
Richer environment, more functionality.
These systems use familiar interfaces, even standards.
Problems when converting an OS to an RTOS:
o Interface problems (nice and setpriority in Linux)
o Timers too coarse
o Memory management has no bounded execution time
o Intolerable overhead, excessive latency
CSE480/CIS700
S. Fischmeister
9
How to do an RT Extension?
Compliant kernels
o Takes an existing RTOS and make it execute other UNIX
binaries (see LynxOS).
o Interfaces need to be reprogrammed.
o Behavior needs to be correctly reimplemented.
CSE480/CIS700
S. Fischmeister
10
5
How to do an RT Extension?
Dual kernels
o Puts an RTOS kernel between the hardware and the OS.
o Hard tasks run in the RTOS kernel, the OS runs when
CPU is available.
o Native applications can run without any changes.
o Hard tasks get real-time properties.
o See RTLinuxPro
Problems:
A single failing hard task can kill the whole system.
The RTOS kernel requires its own IO drivers.
CSE480/CIS700
S. Fischmeister
11
How to do an RT Extension?
Core kernel modifications
o Takes the non-RT operating systems and modifies it to
become an RTOS.
Problem: (need to do all this)
o
o
o
o
o
Implement high-resolution timers
Make the kernel preemptive
Implement priority inheritance
Replace FIFOs with priority queues
Find and change long kernel execution paths
CSE480/CIS700
S. Fischmeister
12
6
Component-based Kernels
The source consists of a number of components that can be
selectively included to compose the RTOS.
See OS-Kit, Coyote, PURE, 2k, MMLite, Pebble, Chaos, eCos.
eCos
o Hardware Abstraction Layer (HAL)
o Real-time kernel
CSE480/CIS700
Interrupt handling
Exception handling
Choice of schedulers
Thread support
Rich set of synchronization primitives
Timers, counters and alarms
Choice of memory allocators
Debug and instrumentation support
Counters -- Count event occurrences
Clocks -- Provide system clocks
Alarms -- Run an alarm function
Mutexes -- Synchronization primitive
Condition Variables -- Synchronization primitive
Semaphores -- Synchronization primitive
Mail boxes -- Synchronization primitive
Event Flags -- Synchronization primitive
Spinlocks -- Low-level Synchronization Primitive
Scheduler Control -- Control the state of the scheduler
Interrupt Handling -- Manage interrupt handlers
S. Fischmeister
13
Component-based Kernels
eCos
o
o
o
o
o
o
o
µITRON 3.0 compatible API
POSIX compatible API
ISO C and math libraries
Serial, ethernet, wallclock and watchdog device drivers
USB slave support
TCP/IP networking stacks
GDB debug support
All components can be added through a configuration
file that includes and excludes parts of the source code.
CSE480/CIS700
S. Fischmeister
14
7
Research Kernels
Many researchers built a new kernel for one of these
reasons:
o
o
o
o
o
o
o
o
o
Challenge basic assumptions made in timesharing OS
Developing real-time process models
Developing real-time synchronization primitives
Developing solutions facilitating timing analysis
Strong emphasis on predictability
Strong emphasis on fault tolerance
Investigate the object-oriented approach
Real-time multiprocessor support
Investigating QoS
CSE480/CIS700
S. Fischmeister
15
What Typically Differs
16
8
Requirements
RTOS must be predictable
o We have to validate the system
o We have to validate the OS calls/services
We must know upper bounds to
o Execution time of system calls
o Memory usage
We must have static bounds on
o Memory layout
o Size of data structures (e.g. queues)
Fine grain interrupt control
CSE480/CIS700
S. Fischmeister
17
RTOS Predictability
All components of the RTOS must be predictable
o System calls, device drivers, kernel internal management
Memory access
o Page faults, lookup time, caches
Disk access
o Bound for head movement while reading/writing data
Net access
o Bound for time for transmission, switching
o Dropped packets??
Scheduling must be deterministic
CSE480/CIS700
S. Fischmeister
18
9
Admission Control
Admission control is a function that decides if new work
entering the system should be admitted or not.
To perform this it requires:
o
o
o
o
A model of the state of system resources
Knowledge about incoming requests
An algorithm to make the admission decision
Policies for actions to take upon admission and rejection
Statically scheduled systems require no admission
control.
S. Fischmeister
CSE480/CIS700
19
Admission Control
The admission algorithm requires preanalyzed tasks
Shared data
Execution time
Precedence information
Importance level
Deadlines
Positive decision assigns time slices to the task
Negative decision has options:
o Run a simpler version of the task
o Run on a different machine
o Reject the task
Admission algorithms can be complex as they have to consider multiple
resources (e.g., networked video streaming).
CSE480/CIS700
S. Fischmeister
20
10
Resource Reservation
Resource reservation is the act of actually assigning
resources to a task.
o Initially no resource reservation, only allocation as the task
runs.
o Valuable for hard real-time systems.
o Introduces an overhead as resources might be unused
=> introduction of resource reclaiming strategies
Closely linked to resource kernels that offer interfaces
for resource reservation, donation, and reflection.
CSE480/CIS700
S. Fischmeister
21
Task Declaration
RTOSs tailored to microprocessors often require a static
declaration of tasks.
Advantages are:
o
o
o
o
Simple check that the system has sufficient resources.
No admission control necessary.
No overhead introduced by the admission test.
No thread spawning problems
=> but quite static
CSE480/CIS700
S. Fischmeister
22
11
Boot from ROM
The RTOS typically boots from the ROM when used on
microprocessors.
Requires the application program to actually start up the
RTOS:
void main (void) {
/* Perform Initializations */
...
OSInit();
...
/* Create at least one task by calling
OSTaskCreate() */
OSStart();
}
CSE480/CIS700
S. Fischmeister
23
Configurability
As mentioned with component-based RTOS, the system
must be configurable.
Include only components needed for the present system
Components must be removable
o Inter-module dependencies limit configurability
Configuration tailors OS to system
o Different configuration possibilities
Example RoboVM (PICDEM and modular robot).
CSE480/CIS700
S. Fischmeister
24
12
Configurability
Remove unused functions
o May be done via linker automatically
Replace functionality
o Motor placement comes in three functions:
Calculated
Lookup table (program memory)
Lookup table (EEPROM)
Conditional compilation
o Use #if, #ifdef constructs
o Needs configuration editor
o Example: Linux make config….
CSE480/CIS700
S. Fischmeister
25
Problem with Configurability
Per (boolean) configuration option, we obtain two new
OS versions.
Embedded systems require extensive testing.
The application must be tested with each configuration
separately:
o
o
o
o
100 configuration options we get around 2^100
Require hardware setup
Require software setup
Require reporting for automated testing
CSE480/CIS700
S. Fischmeister
26
13
Embedded RTOS I/O
I/O normally only through kernel via an system call.
o Expensive but provides control
In an RTOS for embedded systems, tasks are allowed to
do I/O operations directly
o Direct fast access
o Direct task to task communication between chips
Problem: Can cause troubles if tasks interfere
Solution: Programmer must do synchronization too
CSE480/CIS700
S. Fischmeister
27
Embedded RTOS: Interrupts
Normal OS: Interrupts are kernel only
o Must be reliable (dropped disk interrupts…)
o Costly: Notification via context switch/syscalls
Embedded OS: tasks can use interrupts
o
o
o
o
Again: only trusted/tested programs
Speed important
Fast task control possible
But: modularity decreases, as tasks may have to share
interrupts correctly
CSE480/CIS700
S. Fischmeister
28
14
PICOS18
29
Terminology
Critical section, or critical region, is code that needs to
be treated indivisibly.
o No interrupts
o No context switch
Resource is an entity used by a task.
o Printer, keyboard, CAN bus, serial port
Shared resource is a resource that can be used by more
than one task.
o => mutual exclusion
Multitasking is the process of scheduling and switching
the CPU between several tasks.
CSE480/CIS700
S. Fischmeister
30
15
Task
Task, also called thread, is a user application.
o Shares the CPU and resources with other tasks
o Follows a defined life cycle
CSE480/CIS700
S. Fischmeister
31
Context Switches
A context switch occurs whenever the multitasking
kernel decides to run a different task.
o Save the current task’s context in the storage area.
o Restores the new task’s context from the storage area.
o Resumes the new task
Context switching adds overhead.
The more registers a processor has, the higher the
overhead => irrelevant for RTOS as long as its known.
CSE480/CIS700
S. Fischmeister
32
16
Kernels
The kernel is responsible for managing the tasks.
Most fundamental service is the context switch.
Non-preemtive kernels, also cooperative multitasking
o The task needs to explicitly give up control of the CPU.
o Allows low interrupt latency, because they may be never
disabled.
o Allows non-reentrant functions at the task level.
o Response time is determined by the longest task.
o No overhead for protecting shared data.
o Responsiveness may be low, because of low priority task
requiring a lot of time until it releases the CPU.
CSE480/CIS700
S. Fischmeister
33
Kernels
Preemptive kernel
o Responsiveness is good, because tasks get preempted.
o A higher-priority task can preempt a lower priority task that
still requires more time to compute.
o Response time becomes deterministic, because at the
next tick, the OS switches to the other new task.
o Non-reentrant functions require careful programming.
o Periodic execution of the ‘tick’ adds to the overhead.
CSE480/CIS700
S. Fischmeister
34
17
Introduction
PICOS18 is a preemptive RTOS for the PIC18 series.
Bases on OSEK/VDX, an open industry standard.
Developed by Pragmatec.
GPL
www.picos18.com
www.picos18.com/forum
CSE480/CIS700
S. Fischmeister
35
Services
PICOS18 provides
o
o
o
o
o
o
Core services: initialization, scheduling
Alarm and counter manager
Hook routines
Task manager
Event manager
Interrupt manager
CSE480/CIS700
S. Fischmeister
36
18
PICOS18 Interrupt Routine
Part of the user application.
One for the high priority interrupts and one for low
priority interrupts.
Most important part: AddOneTick()
Let’s have a look.
CSE480/CIS700
S. Fischmeister
37
PICOS18 Context Switch
The active task gets suspended and its context gets
pushed onto its stack.
The preempted task gets resumed and its context gets
restored.
Let’s have look at the save_task_ctx routine.
CSE480/CIS700
S. Fischmeister
38
19
Static Declarations
PICOS18 requires you to statically declare
o Alarms
o Resources
o Tasks
Let’s have a look.
CSE480/CIS700
S. Fischmeister
39
Task API
StatusType ActivateTask (TaskType TaskID)
o Change the state of a task from SUSPENDED to READY.
StatusType TerminateTask (void)
o Changes the state of a task from READY to SUSPENDED.
StatusType ChainTask (TaskType TaskID)
o Terminates the current task, activates a follow up task.
StatusType Schedule(void)
o Invoke the scheduler to find a new active task.
o Not necessary, because PICOS18 is a preemptive OS.
StatusType GetTaskID (TaskRefType TaskID)
StatusType GetTaskState (TaskType TaskID,
TaskStateRefType State)
CSE480/CIS700
S. Fischmeister
40
20
Tasks Implementation
At most 16 events.
The task state is encoded in the following variables:
o tsk_X_state_ID
Bits 0-3: task identifier
Bit 4: unused
Bit 5-7: task state
o tsk_X_active_prio
Bits 0-3: task priority
Bit 5-7: activation counter
o Let’s look at some of the functions in pro_man.c
CSE480/CIS700
S. Fischmeister
41
Event Management
StatusType SetEvent (TaskType TaskID,
EventMaskType Mask)
o Posts an event to another task. Causes a scheduling
operation.
StatusType ClearEvent (EventMaskType Mask)
o Clears the event, otherwise an infinite loop.
StatusType GetEvent (TaskType TaskID,
EventMaskRefType Event)
o Receives the event value for a specific task.
StatusType WaitEvent (EventMaskType Mask)
o Blocks the current task until the event occurs.
CSE480/CIS700
S. Fischmeister
42
21
Event Implementation
At most 16 events.
The event status is encoded in these two variables:
o EventMaskType event_X
For each task 16 possible events.
o EventMaskType wait_X
Each task can listen for 16 possible events.
Let’s have a look at the code.
CSE480/CIS700
S. Fischmeister
43
Alarm Management
StatusType GetAlarm (AlarmType AlarmID,
TickRefType Tick)
o Returns the number of ticks until the alarm goes off.
StatusType SetRelAlarm (AlarmType AlarmID,
TickType increment, TickType cycle)
o Registers an alarm relative to the current kernel counter.
StatusType SetAbsAlarm (AlarmType AlarmID,
TickType start, TickType cycle)
o Registers an alarm as absolute kernel counter tick value.
StatusType CancelAlarm (AlarmType AlarmID)
o Deactivate an alarm.
CSE480/CIS700
S. Fischmeister
44
22
Alarm Implementation
Each tick the alarm counters get incremented by one.
If the alarm value equals the counter value, then the
alarm will cause an event.
Let’s look at the code.
CSE480/CIS700
S. Fischmeister
45
Sample Application
Let’s look at the sample application that comes with
PICOS18.
CSE480/CIS700
S. Fischmeister
46
23