Chapter 5 The Discrete-Time Fourier Transform 5.0 Introduction
advertisement

ELG 3120 Signals and Systems
Chapter 5
Chapter 5 The Discrete-Time Fourier Transform
5.0 Introduction
•
•
•
There are many similarities and strong parallels in analyzing continuous-time and discretetime signals.
There are also important differences. For example, the Fourier series representation of a
discrete-time periodic signal is finite series, as opposed to the infinite series representation
required for continuous-time period signal.
In this chapter, the analysis will be carried out by taking advantage of the similarities
between continuous-time and discrete-time Fourier analysis.
5.1 Representation of Aperiodic Signals: The discrete-Time Fourier
Transform
5.1.1 Development of the Discrete-Time Fourier Transform
Consider a general sequence that is a finite duration. That is, for some integers N 1 and N 2 , x[n]
equals to zero outside the range N 1 ≤ n ≤ N 2 , as shown in the figure below.
We can construct a periodic sequence ~
x [n] using the aperiodic sequence x[n] as one period. As
~
we choose the period N to be larger, x [n] is identical to x[n] over a longer interval, as N → ∞ ,
~
x [n] = x[n] .
Based on the Fourier series representation of a periodic signal given in Eqs. (3.80) and (3.81), we
have
1/5
Yao
ELG 3120 Signals and Systems
∑a e
~
x [ n] =
k =< N >
ak =
jk (2π / N ) n
k
∑ ~x [n]e
Chapter 5
,
− jk (2π / N ) n
(5.1)
.
(5.2)
k= N
If the interval of summation is selected to include the interval N 1 ≤ n ≤ N 2 , so ~
x [n] can be
replaced by x[n] in the summation,
ak =
1
N
N2
∑ x[n]e − jk ( 2π / N ) n =
k = N1
1
N
∞
∑ x[n]e
− jk ( 2π / N ) n
,
(5.3)
k = −∞
Defining the function
jω
X (e ) =
∞
∑ x[n ]e
− j ωn
,
(5.4)
n = −∞
So a k can be written as
ak =
1
X (e jkω 0 ) ,
N
(5.5)
Then ~
x [n] can be expressed as
~
x [n] =
1
1
X (e jk ω 0 )e jk (2π / N ) n =
2π
k =< N > N
∑
∑ X (e
k =< N >
jk ω0
)e jk ( 2π / N ) nω 0 .
(5.6)
As N → ∞ ~
x [n] = x[n] , and the above expression passes to an integral,
x[n ] =
1
2π
∫
2π
X (e jω )e jωn dω ,
(5.7)
The Discrete-time Fourier transform pair:
x[n ] =
jω
1
2π
X (e ) =
∫
2π
X (e jω )e jωn dω ,
∞
∑ x[n]e
n = −∞
(5.8)
− jω n
.
(5.9)
2/5
Yao
ELG 3120 Signals and Systems
Chapter 5
Eq. (5.8) is referred to as synthesis equation, and Eq. (5.9) is referred to as analysis equation
and X (e jkω 0 ) is referred to as the spectrum of x[n] .
5.1.2 Examples of Discrete-Time Fourier Transforms
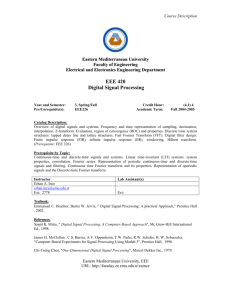
Example: Consider x[n ] = a n u[n] ,
X (e jω ) =
∞
∑ x[n]e − jωn =
n = −∞
a < 1.
∞
∞
n= −∞
n= 0
(5.10)
(
∑ a n u[n ]e − jωn = ∑ ae − jω
)
−n
=
1
.
1 − ae − jω
(5.11)
The magnitude and phase for this example are show in the figure below, where a > 0 and a < 0
are shown in (a) and (b).
n
Example: x[n] = a , a < 1 .
X (e jω ) =
∞
∑ a u[n ]e − jωn =
n
n = −∞
(5.12)
−1
∞
n = −∞
n =0
∑ a −n e − jωn + ∑ a n e − jωn
Let m = −n in the first summation, we obtain
X (e jω ) =
∞
∞
∞
m =1
n =0
∑ a u[ n]e − jωn = ∑ a m e jωm + ∑ a n e − jωn
n
n = −∞
.
=
jω
(5.13)
ae
1
1− a
+
=
− jω
jω
1 − ae
1 − ae
1 − 2 a cos ω + a 2
2
3/5
Yao
ELG 3120 Signals and Systems
Chapter 5
Example: Consider the rectangular pulse
1,
x[n ] =
0,
X ( jω ) =
n≤2
n >2
2
∑e
− j ωn
n= − 2
,
=
(5.14)
sin ω (N1 + 1 / 2 )
.
sin (ω / 2 )
(5.15)
This function is the discrete counterpart of the sic
function, which appears in the Fourier transform of
the continuous-time pulse.
The difference between these two functions is that
the discrete one is periodic (see figure) with period of 2π , whereas the sinc function is aperiodic.
5.1.3 Convergence
The equation X (e jω ) =
∞
∑ x[n ]e
− j ωn
converges either if x[n] is absolutely summable, that is
n = −∞
∞
∑ x[n] < ∞ ,
(5.16)
n = −∞
or if the sequence has finite energy, that is
∞
2
∑ x[n] < ∞ .
(5.17)
n = −∞
4/5
Yao
ELG 3120 Signals and Systems
Chapter 5
And there is no convergence issues associated with the synthesis equation (5.8).
If we approximate an aperidic signal x[n] by an integral of complex exponentials with
frequencies taken over the interval ω ≤ W ,
xˆ[ n] =
1
2π
∫
W
−W
X ( e jω )e jω n dω ,
(5.18)
and xˆ[n ] = x[n ] for W = π . Therefore, the Gibbs phenomenon does not exist in the discrete-time
Fourier transform.
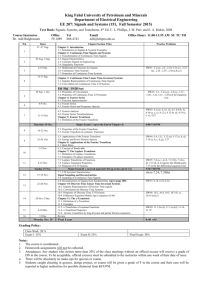
Example: the approximation of the impulse response with different values of W .
For W = π / 4, 3π / 8, π / 2, 3π / 4, 7π / 8, π , the approximations are plotted in the figure below.
)
We can see that when W = π , x[n] = x[n ] .
5/5
Yao
ELG 3120 Signals and Systems
Chapter 5
5.2 Fourier transform of Periodic Signals
For a periodic discrete-time signal,
x[n ] = e jω 0 n ,
(5.19)
its Fourier transform of this signal is periodic in ω with period 2π , and is given
+∞
∑ 2πδ (ω − ω
jω
X (e ) =
l = −∞
0
− 2πl ) .
(5.20)
Now consider a periodic sequence x[n] with period N and with the Fourier series representation
x[n ] =
∑a e
k =< N >
jk ( 2π / N ) n
k
.
(5.21)
The Fourier transform is
+∞
jω
X (e ) =
∑ 2πa δ (ω −
k = −∞
k
2πk
).
N
(5.22)
Example: The Fourier transform of the periodic signal
x[n ] = cos ω0 n =
1 jω0n 1 − jω0 n
2π
e
+ e
, with ω 0 =
,
2
2
3
(5.23)
is given as
2π
2π
X (e jω ) = πδ ω −
+ πδ ω +
,
3
3
−π ≤ ω < π .
6/5
(5.24)
Yao
ELG 3120 Signals and Systems
Chapter 5
Example: The periodic impulse train
x[n ] =
+∞
∑δ [n − kN ] .
(5.25)
k = −∞
The Fourier series coefficients for this signal can be calculated
ak =
∑ x[n ]e
− jk (2π / N ) n
.
(5.26)
n =< N >
Choosing the interval of summation as 0 ≤ n ≤ N − 1 , we have
ak =
1
.
N
(5.27)
The Fourier transform is
X (e jω ) =
2π
N
∞
∑ δ ω −
k = −∞
2πk
.
N
(5.28)
7/5
Yao
ELG 3120 Signals and Systems
Chapter 5
5.3 Properties of the Discrete-Time Fourier Transform
Notations to be used
X (e jω ) = F {x[n]},
{
}
x[n ] = F −1 X (e jω ) ,
F
x[n ] ←→
X (e jω ) .
5.3.1 Periodicity of the Discrete-Time Fourier Transform
The discrete-time Fourier transform is always periodic in ω with period 2π , i.e.,
(
)
( )
X e j (ω +2π ) = X e jω .
(5.29)
5.3.2 Linearity
F
F
If x1 [n] ←→
X 1 (e j ω ) , and x 2 [n] ←→
X 2 (e j ω ) ,
then
F
ax1[n] + bx2 [n] ←→
aX1 (e jω ) + bX 2 (e jω )
(5.30)
5.3.3 Time Shifting and Frequency Shifting
F
If x[n ] ←→
X (e jω ) ,
then
F
x[ n − n0 ] ←→
e − jωn0 X ( e jω )
(5.31)
and
F
e jω0n x[ n] ←→
X ( e j (ω− ω0 ) )
(5.32)
8/5
Yao
ELG 3120 Signals and Systems
Chapter 5
5.3.4 Conjugation and Conjugate Symmetry
F
If x[n ] ←→
X (e jω ) ,
then
F
x *[n]←→
X * (e− jω )
(5.33)
If x[n] is real valued, its transform X (e jω ) is conjugate symmetric. That is
X (e jω ) = X * (e− jω )
(5.34)
{
}
{
}
From this, it follows that Re X (e jω ) is an even function of ω and Im X (e j ω ) is an odd
function of ω . Similarly, the magnitude of X (e jω ) is an even function and the phase angle is
an odd function. Furthermore,
{
}
F
Ev{x[n]}←→
Re X (e jω ,
(5.35)
and
{
}
F
Od {x[ n]}←→
j Im X (e jω .
(5.36)
5.3.5 Differencing and Accumulation
F
If x[n ] ←→
X (e jω ) ,
then
(
)
F
x[n] − x[n − 1] ←→
1 − e − jω X (e jω ) .
(5.37)
For signal
y[ n] =
n
∑ x[ m] ,
(5.38)
m = −∞
its Fourier transform is given as
9/5
Yao
ELG 3120 Signals and Systems
Chapter 5
+∞
1
jω
j0
x[ m] ←→
X ( e ) + πX (e ) ∑ δ (ω − 2πk ) .
∑
− jω
1−e
m = −∞
m =−∞
n
F
(5.39)
The impulse train on the right-hand side reflects the dc or average value that can result from
summation.
For example, the Fourier transform of the unit step x[n ] = u[n ] can be obtained by using the
accumulation property.
F
We know g[n ] = δ [n] ←→
G(e jω ) = 1 , so
x[n ] =
n
F
∑ g[m] ←→
m = −∞
+∞
+∞
1
1
jω
j0
G
e
+
G
e
−
k
=
+
(
)
(
)
(
2
)
π
δ
ω
π
π
∑
∑ δ (ω − 2πk ) .
1 − e − jω
1 − e − jω
k = −∞
k = −∞
(5.40)
(
)
(
)
5.3.6 Time Reversal
F
If x[n ] ←→
X (e jω ) ,
then
F
x[−n] ←→
X (−e jω ) .
(5.41)
5.3.7 Time Expansion
For continuous-time signal, we have
F
x( at) ←→
1 jω
X
.
a a
(5.42)
For discrete-time signals, however, a should be an integer. Let us define a signal with k a
positive integer,
x[n / k ],
x( k ) [n] =
0,
if n is a multiple of k
.
if n is not a multiple of k
(5.43)
x( k ) [n] is obtained from x[n] by placing k − 1 zeros between successive values of the original
signal.
The Fourier transform of x( k ) [n] is given by
10/5
Yao
ELG 3120 Signals and Systems
X ( k ) (e j ω ) =
+∞
∑ x( k ) [n ]e − jωn =
n = −∞
Chapter 5
+∞
∑ x ( k ) [rk ]e − jωrk =
r = −∞
+∞
∑ x[r ]e
− j ( kω ) r
= X (e jk ω ) .
(5.44)
r = −∞
That is,
F
x(k ) [n] ←→
X (e jkω ) .
(5.45)
For k > 1 , the signal is spread out and slowed down in time, while its Fourier transform is
compressed.
Example: Consider the sequence x[n] displayed in the figure (a) below. This sequence can be
related to the simpler sequence y[n] as shown in (b).
x[n ] = y( 2 ) [n ] + 2 y (2 ) [ n − 1] ,
where
y[n / 2],
y2 [ n ] =
0,
if n is even
if n is odd
The signals y (2 ) [ n] and 2 y ( 2) [n − 1] are depicted in (c) and (d).
As can be seen from the figure below, y[n] is a rectangular pulse with N 1 = 2 , its Fourier
transform is given by
Y (e jω ) = e − j 2ω
sin( 5ω / 2)
.
sin(ω / 2)
Using the time-expansion property, we then obtain
11/5
Yao
ELG 3120 Signals and Systems
F
y ( 2) [n] ←→
e − j 4ω
Chapter 5
sin( 5ω )
sin(ω )
F
2 y ( 2) [n − 1] ←→
2e − j 5ω
sin( 5ω )
sin(ω )
Combining the two, we have
sin( 5ω )
X (e jω ) = e − j 4ω (1 + 2e − jω )
.
sin(ω )
5.3.8 Differentiation in Frequency
F
If x[n ] ←→
X (e jω ) ,
Differentiate both sides of the analysis equation X (e jω ) =
∞
∑ x[n ]e
− jωn
n = −∞
jω
dX (e ) +∞
= ∑ − jnx[n]e − jωn .
dω
n= −∞
(5.46)
The right-hand side of the Eq. (5.46) is the Fourier transform of − jnx[n] . Therefore, multiplying
both sides by j , we see that
dX (e jω )
nx[n]←→ j
dω .
F
(5.47)
5.3.9 Parseval’s Relation
F
If x[n ] ←→
X (e jω ) , then we have
+∞
∑ x[n] =
n = −∞
2
1
2π
∫
2π
2
X (e jω ) dω
(5.48)
12/5
Yao
ELG 3120 Signals and Systems
Chapter 5
Example: Consider the sequence x[n] whose Fourier transform X (e jω ) is depicted for
− π ≤ ω ≤ π in the figure below. Determine whether or not, in the time domain, x[n] is periodic,
real, even, and /or of finite energy.
•
•
•
The periodicity in time domain implies that the Fourier transform has only impulses located
at various integer multiples of the fundamental frequency. This is not true for X (e jω ) . We
conclude that x[n] is not periodic.
Since real-valued sequence should have a Fourier transform of even magnitude and a phase
function that is odd. This is true for X (e jω ) and ∠X (e jω ) . We conclude that x[n] is real.
If x[n] is real and even, then its Fourier transform should be real and even. However, since
X (e jω ) = X (e jω ) e − j 2ω , X (e jω ) is not real, so we conclude that x[n] is not even.
•
Based on the Parseval’s relation, integrating X (e j ω )
2
from − π to π will yield a finite
quantity. We conclude that x[n] has finite energy.
5.4 The convolution Property
If x[n] , h[n] and y[n] are the input, impulse response, and output, respectively, of an LTI
system, so that
y[ n] = x[n ] ∗ h[n] ,
(5.49)
then,
Y (e jω ) = X (e jω ) H (e jω ) ,
(5.50)
13/5
Yao
ELG 3120 Signals and Systems
Chapter 5
where X (e jω ) , H (e j ω ) and Y (e jω )
respectively.
are the Fourier transforms of x[n] , h[n] and y[n] ,
Example: Consider the discrete-time ideal lowpass filter with a frequency response H (e j ω )
illustrated in the figure below. Using − π ≤ ω ≤ π as the interval of integration in the synthesis
equation, we have
π
h[ n] =
1
2π
∫
=
1
2π
π
−π
∫
−π
H (e j ω )e jωn dω
e jωn dω =
sin ω c n
πn
The frequency response of the discrete-time
ideal lowpass filter is shown in the right figure.
Example: Consider an LTI system with impulse response
h[n ] = α n u[n] ,
α < 1,
and suppose that the input to the system is
x[n ] = β n u[n] ,
β < 1.
The Fourier transforms for h[n] and x[n] are
H (e j ω ) =
1
,
1 − α e − jω
and
X (e jω ) =
1
,
1 − β e − jω
so that
Y (e jω ) = H (e jω ) X (e jω ) =
(1 − α e
− jω
1
.
)(1 − β e − j ω )
14/5
Yao
ELG 3120 Signals and Systems
Chapter 5
If α ≠ β , the partial fraction expansion of Y (e jω ) is given by
α
β
−
A
B
α−β
α −β
Y (e jω ) =
+
+
=
,
− jω
− jω
− jω
(1 − α e ) (1 − β e ) (1 − α e ) (1 − β e − jω )
We can obtain the inverse transform by inspection:
y[ n] =
α
β
1
α n u[n] −
β n u[n ] =
α n +1u[n ] − ββ n +1u[n ] .
α−β
α−β
α−β
(
)
For α = β ,
Y (e jω ) =
1
, which can be expressed as
(1 − α e − j ω ) 2
j jω d
1
.
e
− jω
α
dω 1 − α e
Using the frequency differentiation property, we have
Y (e jω ) =
nα n u[n] ←→ j
F
d
1
dω 1 − α e − j ω
,
To account for the factor e jω , we use the time-shifting property to obtain
(n + 1)α n +1u[n + 1] ←→ je jω
F
d
1
dω 1 − α e − jω
,
Finally, accounting for the factor 1 / α , we have
y[ n] = (n + 1)α n u[n + 1] .
Since the factor n + 1 is zero at n = −1 , so y[n] can be expressed as
y[ n] = (n + 1)α n u[n] .
Example: Consider the system shown in the figure below. The LTI systems with frequency
response H lp (e j ω ) are ideal lowpass filters with cutoff frequency π / 4 and unity gain in the
passband.
15/5
Yao
ELG 3120 Signals and Systems
Chapter 5
w1 [n] = (−1) n x[ n] = e j πn x[n]
•
W1 (e jω ) = X (e j (ω −π ) ) .
⇒
•
W2 (e jω ) = H lp (e j ω ) X (e j (ω − π ) ) .
•
w3 [ n] = (−1) n w2 [n ] = e jπn w2 [ n]
⇒
W3 (e j ω ) = W2 (e j (ω −π ) ) = H lp (e ( j ω − π ) ) X (e j (ω − 2π ) ) .
⇒
W3 (e j ω ) = W2 (e j (ω −π ) ) = H lp (e jω −π ) ) X (e j ω ) (Discrete-Fourier
transforms
are
always
periodic with period of 2π ).
•
W4 (e jω ) = H lp (e j ω ) ) X (e jω ) .
•
Y (e jω ) = W3 (e jω ) + W4 (e j ω ) = H lp (e ( j ω −π ) ) + H lp (e jω ) X (e j ω ) .
[
]
The overall system has a frequency response
[
]
H lp (e jω ) = H lp (e ( jω −π ) ) + H lp (e jω ) X (e jω ) ,
which is shown in figure (b).
The filter is referred to as bandstop filter, where
the stop band is the region π / 4 < ω < 3π / 4 .
It is important to note that not every discrete-time LTI system has a frequency response. If an
LTI system is stable, then its impulse response is absolutely summable; that is,
+∞
∑ h[n] < ∞ ,
(5.51)
n = −∞
5.5 The multiplication Property
Consider y[n] equal to the product of x1 [n] and x 2 [n] , with Y (e jω ) , X 1 (e jω ) , and X 2 (e jω )
denoting the corresponding Fourier transforms. Then
16/5
Yao
ELG 3120 Signals and Systems
F
y[ n] = x1 [n] x2 [n ] ←→
Chapter 5
1
2π
∫
2π
X 1 (e jω ) X 2 (e j ( ω −θ ) ) dθ
(5.52)
Eq. (5.52) corresponds to a periodic convolution of X 1 (e jω ) and X 2 (e jω ) , and the integral in
this equation can be evaluated over any interval of length 2π .
Example: Consider the Fourier transform of a signal x[n] which the product of two signals; that
is
x[n ] = x1 [n] x2 [n]
where
x1 [n] =
sin( 3πn / 4)
, and
πn
x 2 [n ] =
sin(πn / 2)
.
πn
Based on Eq. (5.52), we may write the Fourier transform of x[n]
X (e jω ) =
1
2π
∫
π
−π
X 1 (e jω ) X 2 (e j (ω −θ ) )dθ .
(5.53)
Eq. (5.53) resembles aperiodic convolution, except for the fact that the integration is limited to
the interval of − π < θ < π . The equation can be converted to ordinary convolution with
integration interval − ∞ < θ < ∞ by defining
X (e jω )
Xˆ 1 (e j ω ) = 1
0
for − π < ω < π
otherwise
Then replacing X 1 ( e jω ) in Eq. (5.53) by Xˆ 1 (e jω ) , and using the fact that Xˆ 1 (e jω ) is zero for
− π < ω < π , we see that
X (e jω ) =
1
2π
∫
π
−π
X 1 (e jω ) X 2 (e j (ω −θ ) )dθ =
1
2π
∫
∞
−∞
Xˆ 1 (e j ω ) X 2 (e j (ω −θ ) )dθ .
Thus, X (e jω ) is 1 / 2π times the aperiodic convolution of the rectangular pulse Xˆ 1 (e jω ) and the
periodic square wave X 2 (e jω ) . The result of thus convolution is the Fourier transform X (e jω ) ,
as shown in the figure below.
17/5
Yao
ELG 3120 Signals and Systems
Chapter 5
5.6 Tables of Fourier Transform Properties and Basic Fourier Transform
Paris
18/5
Yao
ELG 3120 Signals and Systems
Chapter 5
19/5
Yao
ELG 3120 Signals and Systems
Chapter 5
5.7 Duality
For continuous-time Fourier transform, we observed a symmetry or duality between the analysis
and synthesis equations. For discrete-time Fourier transform, such duality does not exist.
However, there is a duality in the discrete-time series equations. In addition, there is a duality
relationship between the discrete-time Fourier transform and the continuous-time Fourier
series.
5.7.1 Duality in the discrete-time Fourier Series
Consider the periodic sequences with period N, related through the summation
f [m ] =
1
g (r )e − jr ( 2π / N ) m .
∑
N r =< N >
(5.54)
If we let m = n and r = − k , Eq. (5.54) becomes
f [ n] =
1
g (− r )e jr ( 2π / N ) n .
N
k =< N >
∑
(5.55)
Compare with the two equations below,
∑a e
x[n] =
jk ( 2π / N ) n
k
,
k= N
ak =
1
N
we fond that
FS
f [n] ←→
∑ x[n]e
(3.80)
− jk ( 2π / N ) n
k= N
.
(3.81)
1
g (− r ) corresponds to the sequence of Fourier series coefficients of f [n ] . That is
N
1
g[− k ] .
N
(5.56)
This duality implies that every property of the discrete-time Fourier series has a dual. For
example,
FS
x[n − n 0 ] ←→
a k e − jk ( 2π / N ) n 0
(5.57)
FS
e jm ( 2π / N ) n ←→
a k −m
(5.58)
20/5
Yao
ELG 3120 Signals and Systems
Chapter 5
are dual.
Example: Consider the following periodic signal with a period of N = 9 .
1 sin( 5πn / 9)
9 sin(πn/9) ,
x[n ] =
5 ,
9
n ≠ multiple of 9
(5.59)
n = multiple of 9
We know that a rectangular square wave has Fourier coefficients in a form much as in Eq. (5.59).
Duality suggests that the coefficients of x[n] must be in the form of a rectangular square wave.
Let g[n] be a rectangular square wave with period N = 9 ,
1,
g[ n ] =
0,
n ≤2
2< n ≤4
,
(5.60)
The Fourier series coefficients b k for g[n] can be given (refer to example on page 27/3)
1 sin( 5πk / 9)
9 sin(πk/9) ,
bk =
5 ,
9
k ≠ multiple of 9
.
(5.61)
k = multiple of 9
The Fourier analysis equation for g[n] can be written
1 2
bk = ∑ (1)e − j 2πnk / 9 .
9 n =−2
(5.62)
Interchanging the names of the variable k and n and noting that x[n ] = bk , we find that
x[n ] =
1 2
(1)e − j 2πnk / 9 .
∑
9 k =−2
Let k ' = −k in the sum on the right side, we obtain
x[n ] =
1 2
(1)e + j 2πnk ' / 9 .
∑
9 k =−2
21/5
Yao
ELG 3120 Signals and Systems
Chapter 5
Finally, moving the factor 1 / 9 inside the summation, we see that the right side of the equation
has the form of the synthesis equation for x[n] . Thus, we conclude that the Fourier coefficients
for x[n] are given by
1 / 9,
ak =
0,
k ≤2
2< k ≤4
,
with period of N = 9 .
5.8 System Characterization by Linear Constant-Coefficient Difference
Equations
A general linear constant-coefficient difference equation for an LTI system with input x[n] and
output x[n] is of the form
N
∑a
k =0
M
k y[n − k ] =∑ bk x[n − k ] ,
(5.63)
k =0
which is usually referred to as Nth-order difference equation.
There are two ways to determine H (e j ω ) :
•
•
The first way is to apply an input x[n ] = e jωn to the system, and the output must be of the
form H (e j ω )e j ωn . Substituting these expressions into the Eq. (5.63), and performing some
algebra allows us to solve for H (e j ω ) .
The second approach is to use discrete-time Fourier transform properties to solve for
H (e j ω ) .
Based on the convolution property, Eq. (5.63) can be written as
Y (e j ω )
H (e ) =
.
X (e jω )
jω
(5.64)
Applying the Fourier transform to both sides and using the linearity and time-shifting properties,
we obtain the expression
N
M
k =0
k =0
∑ a k e − jkω Y (e jω ) = ∑ bk e − jkω X (e jω ) .
(5.65)
22/5
Yao
ELG 3120 Signals and Systems
Chapter 5
or equivalently
Y (e jω )
H (e ) =
=
X (e jω )
jω
∑
∑
M
k =0
N
bk e − jk ω
a e − jkω
k =0 k
.
(5.66)
Example: Consider the causal LTI system that is characterized by the difference equation,
y[ n] − ay[n − 1] = x[n] ,
a < 1.
The frequency response of this system is
H (e j ω ) =
Y (e jω )
1
=
.
jω
X (e ) 1 − ae jω
The impulse response is given by
h[n ] = a n u[n] .
Example: Consider a causal LTI system that is characterized by the difference equation
y[ n] −
3
1
y[n − 1] + y[n − 2] = 2 x[n] .
4
8
1. What is the impulse response?
n
1
2. If the input to this system is x[n ] = u[n] , what is the system response to this input signal?
4
The frequency response is
H (e j ω ) =
1 − 12 e
1
2
.
=
−
j
2
ω
−
j
ω
3
+ 18 e
(1 − 4 e )(1 − 14 e − jω )
− jω
After partial fraction expansion, we have
H (e j ω ) ==
4
2
,
−
−
j
ω
1 − 12 e
1 − 14 e − jω
The inverse Fourier transform of each term can be recognized by inspection,
n
n
1
1
h[n ] = 4 u[n] − 2 u[n ] .
2
4
23/5
Yao
ELG 3120 Signals and Systems
Chapter 5
Using Eq. (5.64) we have
2
1
Y (e jω ) = H (e jω ) X (e jω ) =
3 − jω
1 − jω
1 − jω
(1 − 4 e )(1 − 4 e ) 1 − 4 e
.
=
(1 − e
3
4
− jω
2
)(1 − e − jω )(1 − 14 e − jω )
1
4
After partial-fraction expansion, we obtain
Y (e jω ) = H (e jω ) X (e jω ) = −
4
2
−
−
j
ω
1 − 14 e
1 − 14 e − jω
(
)
2
+
8
1 − 12 e − j ω
The inverse Fourier transform is
n
2
1 n
1
1
y[ n] = − 4 − 2( n + 1) + 8 u[n ] .
2
2
4
24/5
Yao