Discrete-Time Fourier Transform
advertisement

Discrete-Time Fourier Transform
• Continuous-Time Fourier Transform
• Discrete-Time Fourier Transform.
• Discrete-Time Fourier Transform
Theorems.
• Band-Limited Discrete-Time Signals
• The Frequency Response of an LTI
Discrete-Time System
• Phase and Group Delays
Continuous-Time Fourier
Transform Pair Equation
Synthesis equation or Inverse FT .
1 +∞
jωt
x(t ) =
X
(
j
)
e
d
.
ω
ω
∫
2π −∞
Analysis equation or Fourier Transform
+∞
X ( jω ) = ∫ x(t )e
−∞
− j ωt
dt.
Continuous-Time Fourier
Transform
1
Inverse CTFT : − x(t ) =
2π
CTFT : −
X ( jω ) = ∫
t = +∞
t = −∞
ω = +∞
∫ω
= −∞
X ( jω )e jω t dω
x(t )e − jω t dt
CTFT
→ X ( jω )
x(t ) ←
X ( jω ) = Re{ X ( jω )} + j Im{ X ( jω )}
=| X ( jω ) | e j∠X ( jω )
| X ( jω ) | is the magnitude spectrum.
∠X ( jω ) is the phase spectrum
−1 Im{ X ( jω )}
= arg{ X ( jω )} = tan
Re{ X ( jω )}
Example 3.1
− at
x(t ) = e u (t )
X ( jω ) = ∫
t = +∞
t = −∞
∞
x(t )e
=∫ e e
0
− at − jω t
− jω t
dt
∞
dt = ∫ e
0
− 1 − ( a + jω ) t ∞
=
e
|0
a + jω
1
CTFT
− at
e u (t ) ←→
a + jω
− t ( a + jω )
Convergence of CTFT
• CTFT of continuous-time signal will only exist if the
Dirichlet conditions are satisfied:• (1) Signal must have finite number of discontinuities
and finite number of maximum & minimum in any
finite interval of time.
• (2) Signal must be absolutely integrable:-
∫
∞
−∞
| x(t )dt < ∞
Properties of Fourier Transform
•
•
•
•
•
•
•
•
•
•
Linearity
Time Shifting
Conjugation
Differentiation in the time-domain
Integration in the time-domain
Time and Frequency Scaling.
Duality
Parseval’s Relation
Convolution
Multiplication
Summary of the approach to
obtain the Fourier Transform for
Discrete-time aperiodic signals.
x[n] APERIODIC
~
- construct periodic signal x[n] for
which one period is x[n].
~
- x[n] has a Fourier series.
~
- as period of x[n] increases,
~
x[n] → x[ n],
~
and Fourier series of x[n] → Fourier Transform of x[n]
Development of Discrete-time
Fourier Transforms. DTFT.
x[n}
-N1 0
-N
-N1
0
N2
N2
N
Fourier Series of discrete - time periodic signal
~
x[n] =
jk ( 2π / N ) n
a
e
......Eqn 5.1
∑ k
k =< N >
Development of Discrete-time
Fourier Transforms.
Thus we have the Discrete - time Fourier Transform pair as : 1) Synthesis equation, Inverse Fourier Transform : 1
jω
jω n
x[n] =
X
(
e
)
e
dω .
∫
2π 2π
2) Analysis equation, Fourier Transform or Fourier Spectrum : ∞
jω
X(e ) =
− jω n
x
[
n
]
e
.
∑
n = −∞
Discrete-time Fourier Transform
DTFT
jω
x[n] ↔ X (e )
jω
jω
jω
X (e ) = Re{ X (e )} + j Im{X (e )}
jω
= | X(e ) | e
j∠X ( e jω )
jω
| X(e ) | is known as magnitude spectrum.
jω
Im{X (e )}
∠X (e ) = arg{ X (e )} = tan
jω
Re{ X (e )}
is known as the phase spectrum
jω
jω
−1
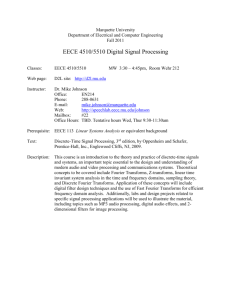
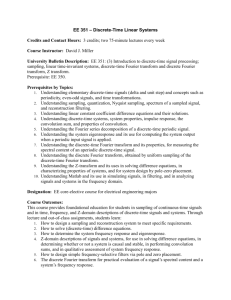
Example 3.6 Discrete-time Fourier Transform.
x[n] = a nu[n], 0 < a < 1
0
n
Example 3.6 Discrete-time Fourier Transform.
x[n] = a n u[n], 0 < a < 1
∞
jω
X (e ) =
∑ a u[n]e
n
∞
− jω n
= ∑ (ae
1
) =
1 − ae − jω
− jω n
n =0
n = −∞
1
(1 − a)
|X(ω)|
1
(1 + a )
-π
0
tan −1 (a / 1 − a 2 )
Phase X(ω)
-π
− tan −1 ( a / 1 − a 2 )
2π
π
π
2π
ω
Properties of Discrete-time Fourier Transforms.
DTFT
jω
x[n] ↔ X (e )
DTFT
x[-n] ↔ X (e
Periodic :
− jω
)
X (ω ) = X (ω + 2πm)
Properties of Discrete-time Fourier
Transforms.
Conjugation :
DTFT
x [ n ] ↔ X * ( e − jω )
*
DTFT
Pr oof From : − x[n] ↔ X (e jω )
DTFT
xre [n] + jxim [n] ↔ X re (e jω ) + jX im (e jω )
Taking conjugation on both side of above equation : _
ie. replacing j = -j.
DTFT
xre [n] − jxim [n] ↔ X re (e − jω ) − jX im (e − jω )
DTFT
∴ x [n] ↔ X * (e − jω ).
*
Properties of Discrete-time Fourier
Transforms.
DTFT
Conjugation : − x [n] ↔ X * (e − jω )
*
Conjugate Symmetry : −
DTFT
If x[n] is real, then x[n] = x [n] ↔ X (e jω ) = X * (e − jω )
*
By Defination : - X (e jω ) = X re (e jω ) + jX im (e jω )
and
X* (e − jω ) = X re (e − jω ) − jX im (e − jω )
Since X (e jω ) = X * (e − jω ) because x[n] is real.
∴ X re (e jω ) + jX im (e jω ) = X re (e − jω ) − jX im (e − jω )
∴ X re (e jω ) = X re (e − jω ), i.e. X re (e jω ) is an even function of ω .
∴ X im (e jω ) = − X im (e − jω ), i.e. X im (e jω ) is an odd function of ω .
Properties of Discrete-time Fourier
Transforms.
Conjugate Symmetry
F .T .
If x[n] is real, then x[n] = x *[n] ↔ X (e jω ) = X * (e − jω )
By Defination : -
X (e jω ) = X re (e jω ) + jX im (e jω )
replacing ω → -ω , X (e − jω ) = X re (e − jω ) + jX im (e − jω )
taking conjugation X* (e − jω ) = X re (e − jω ) − jX im (e − jω )
| X (e jω ) |=| X re (e jω ) + jX im (e jω ) |= X re2 (e jω ) + X im2 (e jω )
| X (e − jω ) |=| X re (e − jω ) + jX im (e − jω ) |= X re2 (e − jω ) + X im2 (e − jω )
| X * (e − jω ) |= | X re (e − jω ) − jX im (e − jω ) |= X re2 (e − jω ) + X im2 (e − jω )
∴| X (e jω ) |=| X (e − jω ) |=| X * (e − jω ) |
Since | X (e jω ) | =| X (e − jω ) |, the function | X (e jω | is an even function of ω .
arg{ X(e jω )} = tan −1
X im (e jω )
X re (e jω )
arg{ X(e − jω )} = tan −1
X im (e − jω )
X re (e − jω )
arg{ X* (e − jω )} = tan −1
− jω
)
− X im (e − jω )
−1 X im (e
tan
=
−
− jω
− jω
X re (e )
X re (e )
∴ arg{ X* (e − jω )} = −arg{ X(e − jω )}
and Since X (e jω ) = X * (e − jω ) because x[n] is real.
arg{ X(e jω )} = arg{ X* (e − jω )
∴ arg{ X(e jω )} = −arg{ X(e − jω )}
i.e Phase angle X (e jω ) is an odd function of ω .
Properties of Discrete-time Fourier
Transforms.
F .T .
If x[n] is real, and x[n] ↔ X (e jω ) = Re{ X (e jω )} + jIM { X (e jω )}
x[n] = Even part x[n] + Odd part of x[n]
jω
jω
jω
X (e ) = Even part X (e ) + Odd part X(e ).
But from previous slide, Real { X (e jω )} is even function of ω .
F .T .
∴ Ev{x[n]} ↔ Re{ X (e jω )}
From previous slide, Im { X (e jω )} is odd function of ω .
F .T .
∴ Odd{x[n]} ↔ j Im{X (e jω )}
Discrete-time Fourier Transform
Theorems.
Time shifting : F .T
x[n - n 0 ] ↔ e − jωn0 X (e jω )
Frequency shifting : e
jω 0 n
F .T
x[n] ↔ X (e j (ω −ω 0 ) )
Linearity : F .T
ax1[n] + bx 2 [n] ↔ aX 1 (e jω ) + bX 2 (e jω )
Parseval's relation : ∞
1
| x[n] | =
∑
2π
n =-∞
2
∫π
2
| X (e jω ) |2 dω
Convolution Theorem
F .T
h[n] * x[n] ↔ H (ω ) X (ω )
x[n]
X(ω)
h[n]
H(ω)
h[n]*x[n]
H(ω)X(ω)
Multiplication Theorem
1
h[n]x[n] ↔
H (ω ) * X (ω )
2π
DTFT
DTFT
x[n]
h[n]x[n]
x
h[n]
Band-Limited Discrete-Time
Signals. (e.g. Bandpass)
X ( jω ) = 0, for 0 ≤| ω |< ω a and , ω b ≤| ω |<
Bandwidth = ω b - ω a
− π − ωb
− ωa
ωa
ωb
π
ω
Lowpass Discrete-Time Signals
X ( jω ) = 0, ω p ≤| ω |< π
≠ 0, 0 ≤| ω |< ω p
Bandwidth = ω p
−π
−ω p
ωp
π
ω
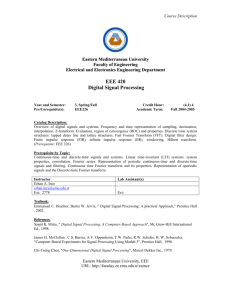
Highpass Discrete-Time Signals
X ( jω ) ≠ 0, ω p ≤| ω |< π
= 0, 0 ≤| ω |< ω p
Bandwidth = π - ω p .
−π
−ω p
0
ωp
π
ω
e.g. Highpass Discrete-Time real
signal
Imaginary part
1
0.5
0.5
Amplitude
Amplitude
Real part
1
0
-0.5
-1
0
0.5
ω/π
Magnitude Spectrum
0
-0.5
-1
1
0.5
0
0.5
ω/π
Phase Spectrum
1
0
0.5
ω/π
1
4
Phase, radians
Magnitude
1
0
0
0.5
ω/π
1
2
0
-2
-4
Frequency Response of LTI DTS
x[n] = e
jωn
y[n] = H (e jω )e jωn
h[n]
y[n]=x[n]*h[n]
In the time domain the output y[n] is calculated,
by convolving input sequence with the system impulse response : y[n] =
∞
∞
k = −∞
k = −∞
∑ x[k ]h[n − k ] = ∑ h[k ]x[n − k ]
Important property of LTI system, certain input signals known as
the eigenfunction produces the same function at the output of the
system multiplied with complex constant known as eigenvalue.
Frequency Response of LTI DTS
x[n] = e
jωn
y[n] = H (e jω )e jωn
h[n]
y[n] =
∞
∞
k = −∞
k = −∞
∑ x[k ]h[n − k ] = ∑ h[k ]x[n − k ]
∞
y[n] =
∑ h[k ]e
∞
jω ( n − k )
=e
j ωn
k = −∞
∑ h[k ]e
− j ωk
k = −∞
y[n] = H (e jω )e jωn
∞
jω
where H (e ) =
∑ h[k ]e
− j ωk
k = −∞
This is the DTFT of h[n] by changing the variable k to n.
H (e jω ) is the frequence response of the LTI DTS and is
related to its impulse response h[n] through DTFT.
DTFT
i.e. h[n] ⇔ H (e jω )
Frequency Response of LTI DTS
x[n]
h[ n]
H ( e jωn )
jω
X (e )
y[n]
jω
Y (e )
Time Domain y[n] = x[n] * h[n]
But by DTFT theorem : convolution in time domain ≡ multiplication in frequency domain
DTFT
x[n] * h[n] ⇔ X (e jω ) H (e jω ).
DTFT
y[n] ⇔ Y (e jω ).
jω
Y
(
e
)
jω
i.e. H (e ) =
X ( e jω )
Frequency Response LTI DTS
H (e jω ) is a complex function and is known as Frequency Response.
H (e jω ) = H re (e jω ) + jH im (e jω )
=| H (e jω ) | e jθ (ω )
| H (e jω ) |= H re2 (e jω ) + H im2 (e jω ) ...............Magnitude Response
θ (ω ) = arg{H (e jω )}.............................Phase Response.
G (ω ) = 20 log 10 | H (e jω ) | decibels(dB)....Gain Function.
A(ω ) = -G(ω )..........Attenuation or Loss Function
Frequency Response of LTI FIR
Discrete-Time System
Input - Output Relationship given by : N2
y[n] =
∑ h[k]x[n - k],
N1 < N 2 .
k = N1
Taking DTFT with linearity & time - shifting properties : Y(e jω ) =
N2
- j ωk
jω
h[k]e
X(e
),
∑
k = N1
jω
N2
Y(e
)
- jωk
h[k]e
∴ Frequency Response H (e jω ) =
=
∑
jω
X(e ) k = N1
jω
jω
H (e ) is a polynomial in e .
Frequency Response of LTI IIR
Discrete-Time System
Input - Output Relationship given by : M
N
∑a
k
y[n - k] = ∑ b k x[n - k].
k =0
k =0
Taking DTFT with linearity & time - shifting properties : M
N
∑ a ke
k =0
- jωk
Y(e ) = ∑ b k e - jωk X(e jω ).
jω
k =0
M
jω
Y(e
)
jω
∴ Frequency Response H (e ) =
=
jω
X(e )
- jωk
b
e
∑ k
k =0
N
- jωk
a
e
∑ k
k =0
H (e jω ) is a rational function in e jω .
Concept of Filtering
• Discrete Signals are sequences of numbers in
time-domain.
• Through DTFT, Discrete Signals are
transformed into frequency domian which are
represented as magnitude and phase spectrum
of frequencies.
• Shape the Spectrums to the desired forms by
multiplying them with frequency response of LTI
Discrete-Time Systems.
– Frequency shaping filters
– Frequency selective filters.
Frequency Response of LTI DTS
x[n]
h[ n]
H ( e jωn )
jω
X (e )
y[n]
jω
Y (e )
Time Domain y[n] = x[n] * h[n]
But by DTFT theorem : convolution in time domain ≡ multiplication in frequency domain
DTFT
x[n] * h[n] ⇔ X (e jω ) H (e jω ).
DTFT
y[n] ⇔ Y (e jω ).
jω
Y
(
e
)
jω
i.e. H (e ) =
X ( e jω )
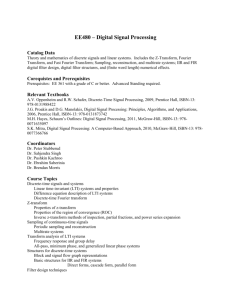
In Frequency Domain
X ( jω ) = 0, ω p ≤| ω |< π
≠ 0, 0 ≤| ω |< ω p
Bandwidth = ω p
Signal Magnitude Spectrum
−π
−ω p
ωp
π
Magnitude Response
Of LTI DTS (Filter)
ωc
ω
What happen to Phase?
• Phase and Group Delays need to be considered
since both DTFT of Input and impulse response
are complex functions.
• Multiplying these two complex functions will
result in addition of their phase components
(argument of complex function)
• Group delay is defined as the negative
derivative of phase function with respect to
angular frequency.
Phase & Group Delay
jω
jω
jω
Y(e ) = X (e ) H (e )
∠Y(e jω ) = ∠X (e jω ) + ∠H (e jω )
IF ∠H (e jω ) is denoted as θ (ω )
IF θ (ω ) < 0, the output will lag the input.
IF θ (ω ) > 0, the output will lead the input.
θ (ω )
dθ (ω )
Group Delay = dω
θ (ω 0 )
Phase Delay = -
ω0
ω0