ENGR 0135 Chapter 5 –2 Equivalent force-couple system Department of Mechanical
advertisement

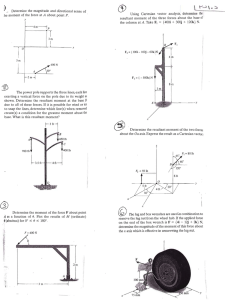
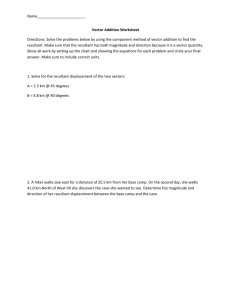
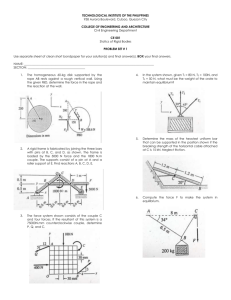
ENGR 0135 Chapter 5 –2 Equivalent force-couple system Department of Mechanical Engineering Topics Couples – Definition of Couples – Characteristics of Couples – Equivalent force-couple system Resultant of non-concurrent force system Department of Mechanical Engineeri Equivalent force-couple systems A force F can be replaced by a parallel force and a couple an equivalent force-couple system acting on a point O Original system of a single force F acting on A. The vector position of A relative to O is r. Original system in the moment plane Replacing the two opposite and equal forces F that are separated by distance d with a couple new system of a couple and a force F at O Adding up a pair of two equal but opposite forces F at O no effect Department of Mechanical Engineeri Example Problem Replace the force that acts on A by a force at point B and a couple Use scalar and vector analysis Basically, it asks us to compute MB and translate the force from A to B Department of Mechanical Engineeri Another example problem: The magnitude of F is 780 lb. Replace the F by a force Fo at the O and a couple C. Two tasks: 1. Compute Mo due to Fo 2. Translate Fo to O. Note: In performing the cross product, both moment arm rOA or rOB are valid. Department of Mechanical Engineeri Coplanar force system - non-concurrent force system The system can be replaced by a resultant force R acting at a distance dR (from a selected point O) The method for finding the resultant of concurrent forces can be used to find the resultant R and its direction cosines The resultant R can be written in the Cartesian vector form The distance dR (or xR, or yR) can be found utilizing the Varignon’s theorem If the sum of forces R is zero, the resultant is a couple C whose direction is perpendicular to the plane (provided that the couple is non-zero) If the sum of moment about a point is zero, then the line of action of the R passes that point When both C and R are zeros, then the system is in equilibrium Department of Mechanical Engineeri Coplanar force system - non-concurrent force system The resultant R n n n i =1 i =1 i =1 R = ∑ Fi = ∑ Fx i + ∑ Fy j = Re R= R = magnitude (∑ F ) + (∑ F ) 2 2 x y e = cos θ x i + cos θ y j cos θ x The F ∑ = x R cos θ y distance dR F ∑ = Gives the direction y R dR = ∑M O R ∑ M O = F1d1 + F2 d 2 + ... Department of Mechanical Engineeri Example Problem What is the magnitude of the resultant and its direction? n n n i =1 i =1 i =1 R = ∑ Fi = ∑ Fx i + ∑ Fy j = Re R= R = (∑ F ) + (∑ F ) 2 2 x y Magnitude: e = cos θ x i + cos θ y j cos θ x F ∑ = x R cos θ y F ∑ = y R Rx = 300 + 500 cos 60 = 550 N R y = 200 + 500 sin 60 = 633 N R = 550 2 + 6332 = 839 N Direction: θ x = cos −1 550 = 49.0o 839 Department of Mechanical Engineeri Example Problem How dR = to get dR and xR? ∑M xR= O R ∑ M O = −300(0.4) − 500 cos 60(0.7) − 200(0.450) + 600 = 215 Nm 215 = 0.256m dR = 839 xR = ∑M Ry O = dR = 215 = 0.340m 633 xR = the distance from O to the intercept of the line of action of the resultant with the x-axis Department of Mechanical Engineeri Coplanar force system – parallel forces The system can be replaced by a resultant force R acting at a distance dR (from a selected point ) The resultant R is simply the sum of the parallel forces The distance xR can be calculated using the Varignon’s theorem Department of Mechanical Engineeri Coplanar force system – parallel forces The resultant R is given by R = ∑ Fi direction is vertical The distance xR can be calculated using the Varignon’s theorem O The xR M ∑ = O O R ∑ M O = F1 x1 + F2 x2 + ... Department of Mechanical Engineeri Example: coplanar parallel forces If each of the light weighs 150 lb, determine the resultant and the location w.r.t A Department of Mechanical Engineeri Non-coplanar parallel force system The resultant R is given by And the position of R is given by R = ∑ Fi xR M ∑ =− y yR M ∑ = x R R ∑ M x = F1 y1 + F2 y2 + ... − ∑ M y = F1 x1 + F2 x2 + ... Department of Mechanical Engineeri Example Problem 5-12: Determine the R and the location w.r.t O Tasks: – Find the sum of the forces – Find the sum of the moments about y and x axis Department of Mechanical Engineeri General 3D non-concurrent force system Department of Mechanical Engineeri General 3D non-concurrent force system General 3D force system can be replaced by – – A system of non-coplanar, concurrent forces through the origin O that have the same magnitude and directions as the forces of the original system + A system of non-coplanar couples Department of Mechanical Engineeri General 3D force system – 1. The concurrent force system The resultant of the concurrent force system: R = R x + R y + R z = Rx i + R y j + Rz k = Re Rx = ∑ Fx R y = ∑ Fy Rz = ∑ Fz R = Rx2 + R y2 + Rz2 e = cos θ x i + cos θ y j + cos θ z k Rx cos θ x = R cos θ y = Ry R Rz cos θ z = R Department of Mechanical Engineeri General 3D force system – 2. The noncoplanar couple system The resultant of the non-coplanar couples C = ∑ C x + ∑ C y + ∑ C z = ∑ C x i + ∑ C y j + ∑ C z k = Ce C= ∑C x + ∑C y + ∑C z 2 2 2 e = cos θ x i + cos θ y j + cos θ z k C = ∑ (rOi × Fi ) cos θ x C ∑ = C x cos θ y C ∑ = C y cos θ z C ∑ = z C Department of Mechanical Engineeri Example Replace the force system with a force R through point O and a couple C Tasks: – Find the force vectors FA, FB, FC – Find the resultant R – Obtain the total moment Mo (or C) in vectorial – Obtain the magnitude of Mo – Determine the direction cosines Department of Mechanical Engineeri Example: Four forces are applied to a truss as shown. Determine the magnitude and direction of the resultant of the four forces and the perpendicular distance dR from point A to the line of action of the resultant. Department of Mechanical Engineeri Example: Four parallel forces act on a concrete slab as shown. – Determine the resultant of the forces and locate the intersection of the line of action of the resultant with the xy-plane. Department of Mechanical Engineeri Example: The homogeneous plate shown has a mass of 90 kg. The magnitude of the force T in cable BC is 800 N. – Replace the weight and cable forces by an equivalent force-couple system at hinge A. Department of Mechanical Engineeri