Synchronization - seenet-mtp
advertisement

Plan
PMF - Skopje
Primeri nelinearnih oscilatora
Fazni prelaz kod modela Kuramoto
Nestabilne fiksne ta~ke i wihova stabilizacija
Nau~na produkcija na Balkanu
PMF, Skopje
Prose~na golemina na
evropski oddel za fizika (2009)
Studenti - 467
(univerzitet - 23260)
Nastaven personal - 79
(univ - 1990)
Doktoranti - 75
Na PMF, soodvetno st. 20-30, n. 23 i d. 7-8
. . .
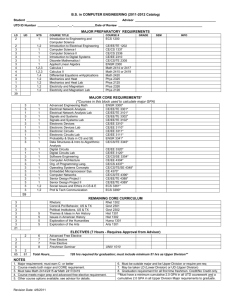
Current programme – part 1
(semesters 1-4)
(lectures + tutorials + laboratory = credit points)
I
Mechanics
Mathematical Analysis 1
Computer usage in physics
Introduction to metrology
Elective course 1
Elective course 2
III
Electromagnetism
Mathematical physics 1
Theoretical mechanics
Oscillations and waves
Elective course 6
Elective course 7
4+2+2=8
4+4+0=8
2+0+2=4
2+0+2=4
3+0+0=3
3+0+0=3
II
Molecular physics
Mathematical analysis 2
Chemistry
Elective course 3
Elective course 4
Elective course 5
4+2+2=7
3+3+0=7
3+2+0=6
2+2+0=4
3+0+0=3
3+0+0=3
IV
Optics
4+2+2=8
Mathematical physics 2
3+3+0=7
Electronics
3+1+3=7
Theoretical electrodynamics and
special theory of relativity 3+2+0=5
Elective course 8
3+0+0=3
4+2+2=8
3+3+0=7
3+0+3=6
3+0+0=3
3+0+0=3
3+0+0=3
Current programme - part 2
(semesters 5-8, physics teachers branch)
V
Atomic physics
Measurements in physics
General astronomy
Elective course 9
Elective course 10
Elective course 11
Elective course 12
4+2+2=8
3+0+3=6
2+1+0=4
3+0+0=3
3+0+0=3
3+0+0=3
3+0+0=3
VII
Use of computers in teaching
2+0+2=5
Methodology of physics teaching 1 2+2+3=8
School experiments 1
2+0+3=6
Psychology
3+2+0=5
Macedonian language
0+2+0=2
Introduction to biophysics
2+0+2=4
VI
Nuclear physics
Introduction to quantum theory
Introduction to materials
Basics of solid state physics
Pedagogy
4+2+2=8
3+2+0=6
2+0+2=5
3+1+2=6
3+2+0=5
VIII
Methodology of physics teaching 2
(school practice)
2+2+3=8
School experiments 2
2+0+3=5
Design of electronic equipment
2+0+3=4
History and philosophy of physics 3+1+0=4
Diploma thesis
0+0+9=9
Nonlinear oscillator
x b x sin x A sin t
x y
y sin x by A sin t
The Lorenz system
E. N. Lorenz, “Deterministic nonperiodic flow,”
J. Atmos. Sci. 20 (1963) 130.
Fixed points:
C0 (0,0,0)
C± (±8.485, ±8.485,27)
Eigenvalues:
l(C0) = {-22.83, 11.83, -2.67}
l(C±) = {-13.85, 0.09+10.19i, 0.09-10.19i}
Chaotic attractor of the
unperturbed system (F(t)=0)
van der Pol oscillator
x ( x 1) x x 0
2
x y
y (1 x ) y x
2
Limit cycle
Rössler oscillator with harmonic
forcing
x y z E sin(ext t )
y x ay
z f z ( x c)
Historical example from Biology
The glowworms ... Represent another shew, which settle on some
Trees, like a fiery cloud, with this surprising circumstance, that a
whole swarm of these insects, having taken possession of one
Tree, and spread themselves over its branches, sometimes hide
their Light all at once, and a moment after make it appear again
with the utmost regularity and exactness …
Engelbert Kaempfer description from his trip in Siam (1680)
Further examples
• The Moon facing the Earth;
Gallilean satelites; Kirkwood gaps
• Cyclotron and other accelerators
• Stroboscope; Fax-machine
• Biological clocks; Jet lag
• Pacemakers
• Farmacological actions of steroids
Further examples 2
• Cardiorespiratory system
• Entrainment of cardial and locomotor
rhythms
• Cardiovascular coupling during anesthesia
• Synchronization between parts of the brain
• Magnetoencephalographic fields and
muscle activity of Parkinsonian patients
Modelot na Kuramoto
Parametar na poredok i
sinhronizacija
r 1
r 0
Re{enie na modelot na Kuramoto (1975)
/2
r Kr
/ 2
cos 2 g ( Kr sin )d
re{enija
r 0
i
r0
K c 2 / g (0)
/
g ( ) 2
r 1 Kc / K
2
INTRODUCTION - THE PYRAGAS CONTROL METHOD
- Time-delayed feedback control (TDFC)
- Time-delayed autosynchronization (TDAS)
K. Pyragas, Phys. Lett. A 170 (1992) 421
Applications
Delays are natural in many systems
• Coupled oscillators
• Electronic circuits
• Lasers, electrochemistry
• Networks of oscillators
• Brain and cardiac dynamics
VARIABLE DELAY FEEDBACK CONTROL OF USS
Pyragas control force:
- noninvasive for USS and periodic orbits
VDFC force:
- piezoelements, noise
- saw tooth wave:
- random wave:
- sine wave:
A. Gjurchinovski and V. Urumov – Europhys. Lett. 84, 40013 (2008)
VARIABLE DELAY FEEDBACK CONTROL OF USS
THE MECHANISM OF VDFC
DELAY MODULATIONS
THE MECHANISM OF VDFC
THE MECHANISM OF VDFC
2D UNSTABLE FOCUS WITH A DIAGONAL COUPLING
n – sufficiently large
original system :
comparison system :
Characteristic equation of the comparison system (2D focus):
THE MECHANISM OF VDFC
TDAS
VDFC
VDFC
VDFC
THE MECHANISM OF VDFC
The effect of including variable delay into TDAS for small e
• condition for the roots lying on the imaginary axis for e=0 to move to
the left half-plane as e increases from zero
CONCLUSION: the stability domain will expand in all directions within
the half-space K>K0, as soon as e is increased from zero, independent of
the precise way in which the delay is varied
THE MECHANISM OF VDFC
2D unstable focus with
l 0.1 and
e 0 (Pyragas)
Increase of the stability
domain for small e > 0
e 0 (brown)
e 0.07 (green)
e 0.1 (yellow)
THE MECHANISM OF VDFC
eK diagrams for a saw tooth wave modulation (T0=1)
THE MECHANISM OF VDFC
THE MECHANISM OF VDFC
Stability analysis for the Lorenz system (saw tooth wave)
C0 (0,0,0)
C+ (8.485, 8.485,27)
C- (-8.485, -8.485,27)
s 10, r 28, b 8/3
THE MECHANISM OF VDFC
THE MECHANISM OF VDFC
The Rössler system
e0
e 0.5
e1
e2
(sawtooth wave)
O.E. Rössler, Phys. Lett. A 57, 397 (1976).
Fixed points:
C1 (0.007,-0.035,0.035)
C2 (5.693, -28.465,28.465)
Eigenvalues:
l(C1) = {-5.687,0.097+0.995i,0.097-0.995i}
l(C2) = {0.192,-0.00000459+5.428i, -0.00000459-5.428i}
STABILIZATION OF UPO BY VDFC
SQUARE WAVE MODULATION
• periodic change of the delay, e. g. between T0 and 2T0, K fixed (VDFC)
T(t)
t - half-period of the wave
(optimal choice: tT0)
2T0
T0
t
2t
3t
4t
t
• periodic change of the delay, K varied (VDFC + SCHUSTER, STEMMLER)
T(t)
K(t)
+
2T0
T0
t
2t
3t
4t
t
K
K/2
t
2t
3t
4t
t
STABILIZATION OF UPO BY VDFC
•PYRAGAS
F(t)=K [y(t-T0)-y(t)]
•VDFC (square wave)
F(t)=K [y(t-T(t))-y(t)]
•SCHUSTER, STEMMLER
F(t)=K(t) [y(t-T0)-y(t)]
•VDFC (square wave) + SCH-ST
F(t)=K(t) [y(t-T(t))-y(t)]
Rössler T0=5.88
STABILIZATION OF UPO BY VDFC
Rössler T0=11.75
Rössler T0=17.5
STABILIZATION OF UPO BY VDFC
K periodically varied between K and K/4 (Rössler, T0=17.5)
•VDFC + SCHUSTER
•Restricted VDFC + SCHUSTER
F(t)=K(t) Sin [y(t-T(t))-y(t)]
STABILIZATION OF UPO BY VDFC
VDFC (square wave)
t = T0
t = 2T0
t = T0/2
Rössler T0=5.88
STABILITY ANALYSIS - RDDE
Retarded delay-differential equations
•
GOAL: stabilization of unstable steady states by a variable-delay
feedback control in a nonlinear dynamical systems described by a scalar
autonomous retarded delay-differential equation (RDDE)
•
MOTIVATION: extension of the delay method to infinite dimensional
systems
•
INTEREST: frequent occurrence of scalar RDDE in numerous physical,
biological and engineering models, where the time-delays are natural
manifestation of the system’s dynamics
T. Erneux, Applied Delay Differential Equations (Springer, New York, 2009)
DELAY-DIFFERENTIAL EQUATIONS
Retarded delay-differential equations
General scalar RDDE system:
T1 ≥ 0
– constant delay time
F
– arbitrary nonlinear function of the state variable x
Linearized system around the fixed point x*:
Characteristic equation for the stability of steady state x*
of the free-running system:
A. Gjurchinovski and V. Urumov – Phys. Rev. E 81, 016209 (2010)
STABILITY ANALYSIS - RDDE
Retarded delay-differential equations
Controlled RDDE system:
u(t) – Pyragas-type feedback force with a variable time delay
K
T2
f
e
n
– feedback gain (strength of the feedback)
– nominal delay value
– periodic function with zero mean
– amplitude of the modulation
– frequency of the modulation
STABILITY ANALYSIS - RDDE
Stability of the unperturbed system
STABILITY ANALYSIS - RDDE
Stability under variable-delay feedback control
Limitation of the VDFC for RDDE systems:
•
A kind of analogue to the odd-number limitation in the case of delayed
feedback control of systems described by ordinary differential equations:
W. Just et al., Phys. Rev. Lett. 78, 203(1997)
H. Nakajima, Phys. Lett. A 232, 207 (1997)
•
… refuted recently:
B. Fiedler et al., Phys. Rev. Lett. 98, 114101 (2007).
B. Fiedler et al., Phys. Rev. E 77, 066207 (2008).
STABILITY ANALYSIS - RDDE
Representation of the control boundaries
parametrized by = Im(l)
(K,T2) plane:
EXAMPLES AND SIMULATIONS
Mackey-Glass system
•
A model for regeneration of blood cells in patients with leukemia
M. C. Mackey and L. Glass, Science 197, 28 (1977).
•
M-G system under variable-delay feedback control:
•
For the typical values a = 0.2, b = 0.1 and c = 10, the fixed points of the freerunning system are:
•
•
•
x1 = 0 – unstable for any T1, cannot be stabilized by VDFC
x2 = +1 – stable for T1 [0,4.7082)
x3 = -1 – stable for T1 [0,4.7082)
EXAMPLES AND SIMULATIONS
Mackey-Glass system (without control)
(a) T1 = 4
(b) T1 = 8
(c) T1 = 15
(d) T1 = 23
EXAMPLES AND SIMULATIONS
Mackey-Glass system (VDFC)
T1 = 23
(a) e = 0 (TDFC)
(b) e = 0.5 (saw)
(c) e = 1 (saw)
(d) e = 2 (saw)
EXAMPLES AND SIMULATIONS
Mackey-Glass system (VDFC)
T1 = 23
(a) e = 1 (sin)
(b) e = 2 (sin)
(c) e = 1 (sqr)
(d) e = 2 (sqr)
EXAMPLES AND SIMULATIONS
Mackey-Glass system (VDFC)
K = 0.5
(a) e = 0 (TDFC)
(b) e = 2 (saw)
(c) e = 2 (sin)
(d) e = 2 (sqr)
EXAMPLES AND SIMULATIONS
Mackey-Glass system (VDFC)
saw
sin
sqr
T1 = 23, T2 = 18, K = 2, e = 2, n = 5
EXAMPLES AND SIMULATIONS
Mackey-Glass system (VDFC)
EXAMPLES AND SIMULATIONS
Mackey-Glass system (VDFC)
EXAMPLES AND SIMULATIONS
Ikeda system
•
Introduced to describe the dynamics of an optical bistable resonator,
incorporating the round-trip time of light in an optical cavity via the time
delay T1
K. Ikeda, Opt. Commun. 39, 257 (1979)
K. Ikeda and K. Matsumoto, Physica D 29, 223 (1987).
•
Ikeda system under variable-delay feedback control:
•
For = 4 and x0 = /4, the fixed points of the free-running system are:
•
•
•
x1 = 3.05708 – stable for T1 [0, 0.82801)
x2 = 1.05136 – unstable for any T1, cannot be stabilized by VDFC
x3 = -1.86979 – stable for T1 [0, 0.54767)
EXAMPLES AND SIMULATIONS
Sprott system
•
The simplest one-parameter RDDE system with a sinusoidal nonlinearity
J. C. Sprott, Phys. Lett. A 366, 397 (2007)
•
Sprott system under variable-delay feedback control:
•
The fixed points of the free-running system are:
•
x2n = 2n – unstable for any T1, cannot be stabilized by VDFC
•
x2n+1 = (2n+1) – stable for T1 [0, /2)
FRACTIONAL DIFFERENTIAL EQUATIONS
Fractional Rössler system
Caputo fractional-order derivative:
FRACTIONAL DIFFERENTIAL EQUATIONS
Fractional Rössler system
FRACTIONAL DIFFERENTIAL EQUATIONS
Fractional Rössler system - stability diagrams
Time-delayed feedback control
Variable delay feedback control
(sine-wave, e=1, n=10)
Desynchronisation in systems of coupled oscillators
Hindmarsh - Rose oscillators
M. Rosenblum and A. Pikovsky, Phys. Rev. Lett. 92, 114102; Phys. Rev. E 70, 041904 (2004)
Global coupling
Mean field
Delayed feedback control
Desynchronisation in systems of coupled oscillators
System of 1000
H-R oscillators
Feedback
switched on at
t=5000
Kmf=0.08
K=0.0036
t=const=72.5
Desynchronisation in systems of coupled oscillators
Time-delayed feedback control
Variable delay feedback control
(sine-wave, e=40, n=10)
X – Mean field in the absence of feedback
Xf – Mean field in the presence of feedback
Suppression coefficient
T=145 – average period of the mean field in
the absence of feedback
CONCLUSIONS AND FUTURE PROSPECTS
•
Enlarged domain for stabilization of unstable steady states in systems of
ordinary/delay/fractional differential equations in comparison with Pyragas
method and its generalizations
•
Agreement between theory and simulations for large frequencies in the
delay variability
•
The enlargement of the control domain may undergo a complex
rearrangement depending on the type of the delay modulation
•
Extended area of stabilization of periodic orbits by noninvasive variabledelay feedback control
•
Variable delay feedback control provides increased robustness in achieving
desynchronization in wider domain of parameter space in system of
coupled Hindmarsh-Rose oscillators interacting through their mean field
•
The influence of variable-delay feedback in other systems (neutral DDE,
PDE, networks, …)
•
Experimental verification
SCI publikacii od balkanski gradovi
2006-2010
vkupno
statii
apstrakti
zbornici
revijalni
pisma
glavna sorabotka
Atina
26880
16700
4996
1751
1592
1032
US, UK, DE, FR, IT
Belgrad
10348
7287
1669
860
242
112
DE, US, IT, UK, FR
Bukure{t
11413
8184
1312
1523
205
32
FR, DE, US, IT, UK
Zagreb
9576
6590
1252
936
373
194
US, DE, IT, FR, SLO
Istanbul
20627
15135
2772
1031
443
703
US, DE, UK, IT, FR
Ki{inev
1044
768
123
120
23
6
Qubqana
10482
7957
733
1129
358
87
US, DE, IT, UK, FR
Nikozija
1858
1354
162
175
71
25
GR, US, UK, DE
Podgorica
363
287
54
13
5
Saraevo
824
565
192
48
9
3
Skopje
1257
628
520
58
22
15
DE, BG, US, SRB, IT
Sofija
8964
6826
760
953
241
72
DE, US, FR, IT
Tirana
348
162
147
22
7
7
US, DE, RU, PL
SRB, DE, IT, FR, RU
DE, CRO, US, SRB, SLO
IT, GR, DE, FR, US
SCI publikacii od Skopje 1993-2009
(Sv. Kiril i Metodij)
400
350
300
250
Вкупен опфат
200
Статии
150
100
50
0
1990
1995
2000
2005
2010