the moment of inertia about an axis
advertisement

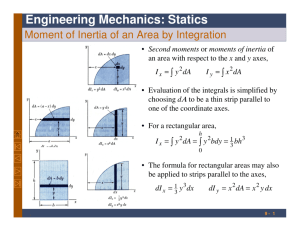
MASS MOMENTS OF INERTIA When studying the dynamics of rotational motion of the rigid body, the learner must be sufficiently aware of how to calculate the so-called rigid body's mass moment of inertia or briefly (moment of inertia). This amount represents an important property of rigid body, and if the mass (m) express resistance to the change in the velocity of transition of the centre of mass of the rigid body, the moment of inertia about an axis gives a measure of the ability of the body to resist the change in the angular velocity about this axis. This is property depends on the geometric distribution of mass of the body about the axis of rotation in addition to the density of its material. The following section gives some definitions and important theories which are commonly used in the determination the moment of inertia. THE MOMENT OF INERTIA ABOUT AN AXIS: The equation of the moment about an axis perpendicular to the plane of motion of the rigid body contains an integration depending on the mass distribution with respect to the axis of moment. Assume a body of mass (m) as in the shown figure. The body rotates about an axis O-O with angular acceleration (𝜶). All the particles consisting the body move in parallel planes perpendicular on the axis of rotation. Assume a mass element of mass (𝒅𝒎) having a tangential component of acceleration ( 𝜶 𝒓 ) , then the tangential effective force is (𝜶 𝒓 𝒅𝒎) and its moment about the axis O-O equals ( 𝜶 𝒓𝟐 𝒅𝒎 ) . The total value of this moment for the whole body is ( ∫ 𝜶 𝒓𝟐 𝒅𝒎 ) .Since the angular acceleration ( 𝜶 ) is the same for all mass elements ,it can be dragged from the integration sign and we get the integration : 1 O α m 𝑰 = ∫ 𝒓𝟐 𝒅𝒎 r dm m r α dm O This integration is called the mass moment of inertia about the axis O – O and it is considered as a property for the bodies which rotates with angular acceleration ( variable angular velocity). The value of this moment of inertia is always positive value and has S.I.units ( kg.m2). RADIUS OF GYRATION: If the body of mass ( 𝒎 ) is equivalent to a particle of the same mass and is on a distance ( 𝒌 ) from the axis of rotation , then the moment of inertia about the axis O – O is : I k2 m k I m The so-called radius of gyration ( k ) is a measure for the distribution of the mass of the body around the axis of rotation. 2 THE POLAR MOMENT OF INERTIA 𝑰𝑶 : 𝑰𝑶 = ∮ 𝒓𝟐 𝒅𝒎 = ∮(𝒙𝟐 + 𝒚𝟐 + 𝒛𝟐 )𝒅𝒎 z THE MOMENT OF INERTIA ABOUT THE AXES: 𝒅𝟑 dm 𝑰𝒙𝒙 = ∮ 𝒅𝟐𝟏 𝒅𝒎 = ∮(𝒚𝟐 + 𝒛𝟐 ) 𝒅𝒎 𝒅𝟐 r z 𝑰𝒚𝒚 = ∮ 𝒅𝟐𝟐 𝒅𝒎 = ∮( 𝒛𝟐 + 𝒙𝟐 ) 𝒅𝒎 𝑰𝒛𝒛 = ∮ 𝒅𝟐𝟑 𝟐 y O 𝒅𝟏 x y 𝟐 𝒅𝒎 = ∮(𝒙 + 𝒚 ) 𝒅𝒎 x THE PRODUCT OF INERTIA ABOUT TWO AXES: 𝑰𝒙𝒚 = ∮ 𝒙 𝒚 𝒅𝒎 , 𝑰𝒚𝒛 = ∮ 𝒚 𝒛 𝒅𝒎 , 𝑰𝒛𝒙 = ∮ 𝒛 𝒙 𝒅𝒎 THE MOMENT OF INERTIA ABOUT THE PLANES: 𝑰𝒙=𝟎 = ∮ 𝒙𝟐 𝒅𝒎 , 𝑰𝒚=𝟎 = ∮ 𝒚𝟐 𝒅𝒎 , 𝑰𝒛=𝟎 = ∮ 𝒛𝟐 𝒅𝒎 THEOREMS: y 1. 𝑰𝒙=𝟎 + 𝑰𝒚=𝟎 + 𝑰𝒛=𝟎 = 𝑰𝑶 y1 2. 𝑰𝒙𝒙 + 𝑰𝒚𝒚 + 𝑰𝒛𝒛 = 𝟐 𝑰𝑶 G1 x a 3. THEORY OF PARALLEL AXES: b 𝑰𝒙𝟏𝒙𝟏 = 𝑰𝒙𝒙 + 𝒎 𝒃𝟐 , O 𝑰𝒚𝟏𝒚𝟏 = 𝑰𝒚𝒚 + 𝒎 𝒂𝟐 , 3 x1 𝑰𝒙𝟏𝒚𝟏 = 𝑰𝒙𝒚 + 𝒎 𝒂 𝒃 , 4. THE THEORY OF PEREPENDICULAR AXES FOR THE THIN PLANES: z 𝑰𝒙𝒙 + 𝑰𝒚𝒚 = 𝑰𝒛𝒛 O y x 5.THEORY OF PARTS : 𝑰𝑶𝑶 = 𝑰𝑶𝑶𝟏 + 𝑰𝑶𝑶𝟐 + 𝑰𝑶𝑶𝟑 3 2 1 O O THE PRINCIPAL AXES OF INERTIA: The system of axes for which the products of inertia vanish is called a system of principal axes i.e. if the system uvw is a system of principal axes , then : y 𝑰𝒖𝒗 = 𝑰𝒗𝒘 = 𝑰𝒘𝒖 = 𝟎 If the body has an axis of symmetry (y-y) ; then dm -x 𝑰𝒙𝒚 = ∮ 𝒙𝒚 𝒅𝒎 + ∮ − 𝒙𝒚 𝒅𝒎 y ∴ 𝑰𝒙𝒚 = 𝒐 dm x y x 4 i.e. the axis of symmetry is always a principal axis of inertia. EXAMPLES: y THIN ROD : dm Mass of unit length: 𝝆= G 𝒎 a 𝟐𝒂 ∴ 𝒅𝒎 = 𝝆 𝒅𝒙 = x a 𝒎 𝒅𝒙 𝟐𝒂 a I yy dx x m 1 x 2 dm x 2 dx m a 2 , 2a 3 a I yy y 1 m a2 3 I xx y 2 dm 0 a I zz x dm x 2 2 a m 1 1 dx m a 2 or : I zz I xx I yy m a 2 2a 3 3 I xy x( 0 ) dm 0 , I yz I zx 0 So the minimum moment of inertia of the rod is that which about its longitudinal axis (x-x). Also the axes Gx , Gy , Gz are principal axes for the rod at G. 5 THIN PLATE : y Assuming the plate a system of uniform thin green rods each of mass ( dm) , then 𝐼𝑥𝑥 = ∮ 𝐼𝑥𝑥 1 2 1 𝑏 𝑑𝑚 = 𝑏 2 ∮ 𝑑𝑚 3 3 b b b b b b b b b b b b b b b 1 = 𝑚 𝑏2 3 Assuming the plate a system of uniform thin yellow rods each of mass ( dm) , then 1 𝐼𝑦𝑦 = ∮ 𝑎2 𝑑𝑚 = 3 𝐼𝑦𝑦 = 1 3 𝑎2 ∮ 𝑑𝑚 1 𝑚 𝑎2 3 By the theorem of perpendicular axes for thin plates: 𝐼𝑧𝑧 = 𝐼𝑥𝑥 + 𝐼𝑦𝑦 = = 1 3 1 𝑚 ( 𝑎2 + 𝑏 2 ) 3 𝑚 𝑏2 , 𝐼𝑧𝑧 = 1 3 𝑚 𝑏2 , 𝐼𝑥𝑦 = 𝐼𝑦𝑧 = 𝐼𝑧𝑥 = 0 So Gx ,Gy , Gz are principal axes of the plate at G. 6 G a x a circular ring The figure here shows the small element with respect to the axis of rotation. Here, we can shorten the steps for calculation by considering all elementary masses at a constant distances "R" from the axis. This enables us to take "R" directly out of the basic integral : Moment of inertia of a circular ring about a perpendicular axis passing through the centre 𝑰𝒛𝒛 = ∮ 𝑹𝟐 𝒅𝒎 = 𝑹𝟐 ∮ 𝒅𝒎 𝑰𝒛𝒛 = 𝒎 𝑹𝟐 Applying the theory of perpendicular axes : 𝑰𝒙𝒙 + 𝑰𝒚𝒚 = 𝑰𝒛𝒛 7 Since the distribution of mass about the axes x-x and y-y is the same , then 𝑰𝒙𝒙 = 𝑰𝒚𝒚 , and : 𝑰𝒙𝒙 = 𝑰𝒚𝒚 𝑰𝒛𝒛 𝒎 𝑹𝟐 = = 𝟐 𝟐 THIN CIRCULAR PLATE The figure here shows the selection of elementary mass as a ring element with respect to the axis of rotation. Here, then: Let us consider a small circular ring element of variable radius (r) and width "dr", then : Mass/unit area: 𝝆 = 𝒎 𝒂𝒓𝒆𝒂 = 𝒎 𝝅𝑹𝟐 8 Also 𝒅𝒎 = 𝟐𝝅𝒓𝒅𝒓 ( 𝒎 𝝅𝑹𝟐 ) 𝑰𝒛𝒛 = ∮ 𝒎𝒓𝟐 𝑹 𝑰𝒛𝒛 = ∫ 𝒓𝟐 𝟎 𝑰𝒛𝒛 = 𝟐𝒎𝒓 𝒅𝒓 𝑹𝟐 𝑹 𝟑 𝒓 𝒅𝒓 ∫ 𝑹𝟐 𝟎 𝟐𝒎 𝑰𝒙𝒙 = 𝑰𝒚𝒚 = 𝟐𝒎 𝑹𝟒 𝒎 𝑹𝟐 𝟐 [ ]= 𝟒 𝑹𝟐 , 𝑰𝒛𝒛 = 𝒎 𝟐 𝑹𝟐 𝑰𝒛𝒛 𝒎 𝑹𝟐 = = 𝟐 𝟒 Note that the values of moments of Inertia of a disk have halfs of those corresponding to a ring of the same mass and radius. CIRCULAR CYLINDER SHELL: z 𝑰𝒛𝒛 = 𝒎 𝑹𝟐 𝑰𝒙𝒙 𝟏 𝟏 = 𝒎 𝑹𝟐 + 𝒎 𝑯𝟐 𝟐 𝟑 R H O x 9 y z CIRCULAR CYLINDER 𝑰𝒛𝒛 = 𝟏 𝒎 𝑹𝟐 𝟐 R H 𝑰𝒙𝒙 = 𝟏 𝟏 𝒎 𝑹𝟐 + 𝒎 𝑯𝟐 𝟒 𝟑 y O x SPHERE SHELL SPHERE y y R R x x z 𝑰𝒙𝒙 = 𝑰𝒚𝒚 = 𝑰𝒛𝒛 z 𝟐𝒎 𝑹𝟐 = 𝟑 𝑰𝒙𝒙 = 𝑰𝒚𝒚 = 𝑰𝒛𝒛 10 𝟐𝒎 𝑹𝟐 = 𝟓 SHORT REPORT : y 1m 1m 3m 1m 1m 1m 3m 2m 3m 2m 1m 3m x O For the shown compound body ,if mass/ unit area is 𝟎. 𝟐 𝒌𝒈/𝒎𝟐 , determine 1. The moment of Inertia about x-x axis. 2. The moment of Inertia about y-y axis. 3. The moment of Inertia about z-z axis , perpendicular on the plane of the paper. 11