pptx
advertisement

Ken Birman
Review: Monitors
Why review something we just covered?
People find it hard to get into the “concurrency mindset”
It takes time to get used to this style of coding, and to
thinking about the correctness of concurrent objects
So: review a little, then discuss a related topic, and then
(next time) tackle a new concurrency issue
Yes, this isn’t “linear”…
… but avoids “too much, too fast” …
Huh?
Producer Consumer using Monitors
public class Producer_Consumer {
int N;
Object[] buf;
int n = 0, tail = 0, head = 0;
Object not_empty = new Object();
Object not_full = new Object();
public Producer_Consumer(int len) {
buf = new object[len];
N = len;
}
public Object get() {
Object obj;
synchronized(not_empty) {
while(n == 0)
not_empty.wait();
object obj = buf[tail%N];
tail++;
synchronized(this) { n--; }
}
synchronized(not_full) { not_full.notify(); }
return obj;
}
public void put(Object obj) {
}
synchronized(not_full) {
while(n == N)
not_full.wait();
buf[head%N] = obj;
head++;
synchronized(this) { n++; }
}
synchronized(not_empty) { not_empty.notify(); }
}
3
Subtle aspects
When updating a variable shared by producer and
consumer, the code needs to lock it
Hence synchronized(this) { n++; }
But we can read the variable without interlocks:
while(n == N)
not_full.wait();
4
Subtle aspects
To call wait or notify, must first call synchronized
on the object that you will wait or notify on, hence
synchronized(xyz) { xyz.wait(); }
synchronized(xyz) { xyz.notify(); }
… if our code had been synchronized on something else, you get a
“thread isn’t the owner of this object” exception
When you do call wait, do it inside a while loop and recheck the
condition when you wake up
while(n == N) NotFull.wait();
This way, if someone wakes up the thread (because n < N) but some
other thread sneaks in and now n==N again, your code will be safe.
5
Subtle aspects
Notice that when a thread calls wait(), if it blocks
it also automatically releases the lock on the object
on which wait was done
This is an elegant solution to an issue seen with
semaphores
Caller did mutex.acquire()…. But now needs to call
not_empty.aquire()… and this second call might block
So we need to call mutex.release()…
Danger is that some other thread “slips in” between the two
A race condition!
6
Subtle aspects
But…. Java has a bug…
… nested synchronized() calls are “risky”
If the inner block calls wait, the outer lock
won’t be automatically released
Can easily result in deadlocks
This is why our bounded buffer code
synchronized on Not_Full…
… although sometimes we can even take
advantage of this annoying behavior
7
Readers and Writers
public class ReadersNWriters {
int NReaders = 0, NWriters = 0;
Object CanBegin = new Object();
public synchronized void BeginWrite()
{
synchronized(CanBegin) {
if(NWriters == 1 || NReaders > 0)
CanBegin.Wait();
NWriters = 1;
}
}
public void EndWrite()
{
synchronized(CanBegin) {
NWriters = 0;
CanBegin.Notify();
}
}
public synchronized void BeginRead()
{
synchronized(CanBegin) {
if(NWriters == 1)
CanBegin.Wait();
++NReaders;
}
}
public void EndRead()
{
synchronized(CanBegin) {
if(--NReaders == 0)
CanBegin.Notify();
}
}
}
8
Readers and Writers
public class ReadersNWriters {
int NReaders = 0, NWriters = 0;
Object CanBegin = new Object();
public synchronized void BeginWrite()
{
synchronized(CanBegin) {
if(NWriters == 1 || NReaders > 0)
CanBegin.Wait();
NWriters = 1;
}
}
public void EndWrite()
{
synchronized(CanBegin) {
NWriters = 0;
CanBegin.Notify();
}
}
public synchronized void BeginRead()
{
synchronized(CanBegin) {
if(NWriters == 1)
CanBegin.Wait();
++NReaders;
}
}
public void EndRead()
{
synchronized(CanBegin) {
if(--NReaders == 0)
CanBegin.Notify();
}
}
}
9
Readers and Writers
public class ReadersNWriters {
int NReaders = 0, NWriters = 0;
Object CanBegin = new Object();
public synchronized void BeginWrite()
{
synchronized(CanBegin) {
if(NWriters == 1 || NReaders > 0)
CanBegin.Wait();
NWriters = 1;
}
}
public void EndWrite()
{
synchronized(CanBegin) {
NWriters = 0;
CanBegin.Notify();
}
}
public synchronized void BeginRead()
{
synchronized(CanBegin) {
if(NWriters == 1)
CanBegin.Wait();
++NReaders;
}
}
public void EndRead()
{
synchronized(CanBegin) {
if(--NReaders == 0)
CanBegin.Notify();
}
}
}
10
Understanding the Solution
If any thread is waiting, no other thread gets into
BeginRead or BeginWrite
This is because of the “bug” mentioned before
When we nest synchronization blocks, a wait will only
release the lock on the object we wait on… not the outer
synchronization lock
Readers and Writers
public class ReadersNWriters {
int NReaders = 0, NWriters = 0;
Object CanBegin = new Object();
public synchronized void BeginWrite()
{
synchronized(CanBegin) {
if(NWriters == 1 || NReaders > 0)
CanBegin.Wait();
NWriters = 1;
}
}
public void EndWrite()
{
synchronized(CanBegin) {
NWriters = 0;
CanBegin.Notify();
}
}
public synchronized void BeginRead()
{
synchronized(CanBegin) {
if(NWriters == 1)
CanBegin.Wait();
++NReaders;
}
}
public void EndRead()
{
synchronized(CanBegin) {
if(--NReaders == 0)
CanBegin.Notify();
}
}
}
12
Understanding the Solution
A writer can enter if there are no other active writers
and no readers are waiting
13
Readers and Writers
public class ReadersNWriters {
int NReaders = 0, NWriters = 0;
Object CanBegin = new Object();
public synchronized void BeginWrite()
{
synchronized(CanBegin) {
if(NWriters == 1 || NReaders > 0)
CanBegin.Wait();
NWriters = 1;
}
}
public void EndWrite()
{
synchronized(CanBegin) {
NWriters = 0;
CanBegin.Notify();
}
}
public synchronized void BeginRead()
{
synchronized(CanBegin) {
if(NWriters == 1)
CanBegin.Wait();
++NReaders;
}
}
public void EndRead()
{
synchronized(CanBegin) {
if(--NReaders == 0)
CanBegin.Notify();
}
}
}
14
Understanding the Solution
A reader can enter if
There are no writers active or waiting
So we can have many readers active all at once
Otherwise, a reader waits (maybe many do)
15
Readers and Writers
public class ReadersNWriters {
int NReaders = 0, NWriters = 0;
Object CanBegin = new Object();
public synchronized void BeginWrite()
{
synchronized(CanBegin) {
if(NWriters == 1 || NReaders > 0)
CanBegin.Wait();
NWriters = 1;
}
}
public void EndWrite()
{
synchronized(CanBegin) {
NWriters = 0;
CanBegin.Notify();
}
}
public synchronized void BeginRead()
{
synchronized(CanBegin) {
if(NWriters == 1)
CanBegin.Wait();
++NReaders;
}
}
public void EndRead()
{
synchronized(CanBegin) {
if(--NReaders == 0)
CanBegin.Notify();
}
}
}
16
Understanding the Solution
When a writer finishes, it lets one thread in, if
someone is waiting
Doesn’t matter if this is one writer, or one reader
If a reader gets in, and then another shows up, it will get
in too… once it gets past the “entry” synchronization
Similarly, when a reader finishes, if it was the last
reader, it lets a writer in (if any is there)
17
Readers and Writers
public class ReadersNWriters {
int NReaders = 0, NWriters = 0;
Object CanBegin = new Object();
public synchronized void BeginWrite()
{
synchronized(CanBegin) {
if(NWriters == 1 || NReaders > 0)
CanBegin.Wait();
NWriters = 1;
}
}
public void EndWrite()
{
synchronized(CanBegin) {
NWriters = 0;
CanBegin.Notify();
}
}
public synchronized void BeginRead()
{
synchronized(CanBegin) {
if(NWriters == 1)
CanBegin.Wait();
++NReaders;
}
}
public void EndRead()
{
synchronized(CanBegin) {
if(--NReaders == 0)
CanBegin.Notify();
}
}
}
18
Understanding the Solution
It wants to be fair
If a writer is waiting, readers queue up “outside”
If a reader (or another writer) is active or waiting, writers
queue up
19
Comparison with Semaphores
With semaphores we never had a “fair” solution
In fact it can be done, in much the same way
The monitor is relatively simple… and it works!
In general, monitors are relatively less error prone
Still, this particular one isn’t so easy to derive or
understand, because it makes subtle use of the
synchronization lock
Our advice: teams should agree to use monitor style
20
Scheduling
Why discuss?
Hidden under the surface in our work up to now is the
role of the scheduler
It watches the pool of threads, or processes
And when the current thread/process waits, or has
been running for too long
If necessary, “preempts” the current thread/process
Selects something else to run
Context switches to it
OK… so who cares?
We’ve worried about the fairness of our solutions
But implicit in this is the assumption that the
scheduler itself is reasonably fair
At a minimum, that every runnable thread/process gets
plenty of opportunities to run
Let’s look more closely at how schedulers really work
Process Scheduling
Rest of lecture: “process” and “thread” used
interchangeably
Many processes in “ready” state
Which ready process to pick to run on the CPU?
0 ready processes: run idle loop
1 ready process: easy! But if > 1 ready process: what to do?
New
Ready
Running
Waiting
Exit
Some schedulers have no choice
For example, in Java, if you “notify” a thread, it will be
the next thread to obtain the synchronization lock
… even if other threads are waiting
But often, there are situations with
Multiple active processes, or threads
All want to run…
When does scheduler run?
Non-preemptive minimum
Process runs until voluntarily relinquish CPU
process blocks on an event (e.g., I/O or synchronization)
process terminates
Preemptive minimum
All of the above, plus:
New
Event completes: process moves from blocked to ready
Timer interrupts
Implementation: process can be interrupted in favor of another
Running
Ready
Waiting
Exit
Process Model
Process alternates between CPU and I/O bursts
CPU-bound jobs: Long CPU bursts
Matrix multiply
I/O-bound: Short CPU bursts
Editor
emacs
I/O burst = process idle, switch to another “for free”
Problem: don’t know job’s type before running
An underlying assumption:
“response time” most important for interactive jobs (I/O bound)
Scheduling Evaluation Metrics
Many quantitative criteria for evaluating sched algo:
CPU utilization: percentage of time the CPU is not idle
Throughput: completed processes per time unit
Turnaround time: submission to completion
Waiting time: time spent on the ready queue
Response time: response latency
Predictability: variance in any of these measures
The right metric depends on the context
“The perfect CPU scheduler”
Minimize latency: response or job completion time
Maximize throughput: Maximize jobs / time.
Maximize utilization: keep I/O devices busy.
Recurring theme with OS scheduling
Fairness: everyone makes progress, no one starves
Problem Cases
Blindness about job types
I/O goes idle
Optimization involves favoring jobs of type “A” over “B”.
Lots of A’s? B’s starve
Interactive process trapped behind others.
Response time sucks for no reason
Priorities: A depends on B. A’s priority > B’s.
B never runs
Scheduling Algorithms FCFS
First-come First-served (FCFS) (FIFO)
Jobs are scheduled in order of arrival
Non-preemptive
Problem:
Average waiting time depends on arrival order
P1
P2
0
16
P2
0
P3
4
P3
time
20
24
P1
8
Advantage: really simple!
24
Convoy Effect
A CPU bound job will hold CPU until done,
or it causes an I/O burst
rare occurrence, since the thread is CPU-bound
long periods where no I/O requests issued, and CPU held
Result: poor I/O device utilization
Example: one CPU bound job, many I/O bound
CPU bound runs (I/O devices idle)
CPU bound blocks
I/O bound job(s) run, quickly block on I/O
CPU bound runs again
I/O completes
CPU bound still runs while I/O devices idle (continues…)
Simple hack: run process whose I/O completed?
What is a potential problem?
Scheduling Algorithms LIFO
Last-In First-out (LIFO)
Newly arrived jobs are placed at head of ready queue
Improves response time for newly created threads
Problem:
May lead to starvation – early processes may never get CPU
Problem
You work as a short-order cook
Customers come in and specify which dish they want
Each dish takes a different amount of time to prepare
Your goal:
minimize average time the customers wait for their food
What strategy would you use ?
Note: most restaurants use FCFS.
Scheduling Algorithms: SJF
Shortest Job First (SJF)
Choose the job with the shortest next CPU burst
Provably optimal for minimizing average waiting time
P1
P3
0
15
PP2 2
PP3 3
0 3
Problem:
P2
21 24
P1
9
24
Impossible to know the length of the next CPU burst
Scheduling Algorithms SRTF
SJF can be either preemptive or non-preemptive
New, short job arrives; current process has long time to execute
Preemptive SJF is called shortest remaining time first
P2
P3
0
P1
6
P3
0
P1
6
21
10
P2
10 13
P1
24
Shortest Job First Prediction
Approximate next CPU-burst duration
from the durations of the previous bursts
The past can be a good predictor of the future
No need to remember entire past history
Use exponential average:
tn duration of the nth CPU burst
n+1 predicted duration of the (n+1)st CPU burst
n+1 = tn + (1- ) n
where 0 1
determines the weight placed on past behavior
Priority Scheduling
Priority Scheduling
Choose next job based on priority
For SJF, priority = expected CPU burst
Can be either preemptive or non-preemptive
Problem:
Starvation: jobs can wait indefinitely
Solution to starvation
Age processes: increase priority as a function of waiting time
Round Robin
Round Robin (RR)
Often used for timesharing
Ready queue is treated as a circular queue (FIFO)
Each process is given a time slice called a quantum
It is run for the quantum or until it blocks
RR allocates the CPU uniformly (fairly) across participants.
If average queue length is n, each participant gets 1/n
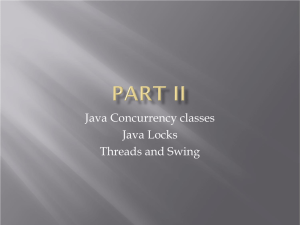
RR with Time Quantum = 20
Process
P1
P2
P3
P4
The Gantt chart is:
P1
0
P2
20
P3
37
P4
57
Burst Time
53
17
68
24
P1
77
P3
P4
97 117
P1
P3
P3
121 134 154 162
Higher average turnaround than SJF,
But better response time
Turnaround Time w/ Time Quanta
RR: Choice of Time Quantum
Performance depends on length of the timeslice
Context switching isn’t a free operation.
If timeslice time is set too high
attempting to amortize context switch cost, you get FCFS.
i.e. processes will finish or block before their slice is up anyway
If it’s set too low
you’re spending all of your time context switching between threads.
Timeslice frequently set to ~100 milliseconds
Context switches typically cost < 1 millisecond
Moral:
Context switch is usually negligible (< 1% per timeslice)
unless you context switch too frequently and lose all
productivity
Scheduling Algorithms
Multi-level Queue Scheduling
Implement multiple ready queues based on job “type”
interactive processes
CPU-bound processes
batch jobs
system processes
student programs
Different queues may be scheduled using different algos
Intra-queue CPU allocation is either strict or proportional
Problem: Classifying jobs into queues is difficult
A process may have CPU-bound phases as well as interactive ones
Multilevel Queue Scheduling
Highest priority
System Processes
Interactive Processes
Batch Processes
Student Processes
Lowest priority
Scheduling Algorithms
Multi-level Feedback Queues
Implement multiple ready queues
Different queues may be scheduled using different algorithms
Just like multilevel queue scheduling, but assignments are not static
Jobs move from queue to queue based on feedback
Feedback = The behavior of the job,
e.g. does it require the full quantum for computation, or
does it perform frequent I/O ?
Very general algorithm
Need to select parameters for:
Number of queues
Scheduling algorithm within each queue
When to upgrade and downgrade a job
Multilevel
Feedback
Queues
Highest priority
Quantum = 2
Quantum = 4
Quantum = 8
FCFS
Lowest priority
A Multi-level System
high
I/O bound jobs
priority
CPU bound jobs
low
timeslice
high
Thread Scheduling
Since all threads share code & data segments
Option 1: Ignore this fact
Option 2: Gang scheduling
run all threads belonging to a process together (multiprocessor only)
if a thread needs to synchronize with another thread
the other one is available and active
Option 3: Two-level scheduling:
Medium level scheduler
schedule processes, and within each process, schedule threads
reduce context switching overhead and improve cache hit ratio
Option 4: Space-based affinity:
assign threads to processors (multiprocessor only)
improve cache hit ratio, but can bite under low-load condition
Real-time Scheduling
Real-time processes have timing constraints
Expressed as deadlines or rate requirements
Common RT scheduling policies
Rate monotonic
Just one scalar priority related to the periodicity of the job
Priority = 1/rate
Static
Earliest deadline first (EDF)
Dynamic but more complex
Priority = deadline
Both require admission control to provide guarantees
Postscript
The best schemes are adaptive.
To do absolutely best we’d have to predict the future.
Most current algorithms give highest priority to those that need the
least!
Scheduling become increasingly ad hoc over the years.
1960s papers very math heavy, now mostly “tweak and see
”
Problem
What are metrics that schedulers should optimize for ?
There are many, the right choice depends on the context
Suppose:
You own an airline, have one expensive plane, and passengers
waiting all around the globe
You own a sweatshop, and need to evaluate workers
You are at a restaurant, and are waiting for food
You are an efficiency expert, and are evaluating government
procedures at the DMV
You are trying to find a project partner or a co-author
You own a software company that would like to deliver a product by
a deadline